Kapitel 1 Kontinuumsphysik thermoelastischer Probleme
Werbung

Kapitel 1
Kontinuumsphysik
thermoelastischer Probleme
1.1
Ziele
Die Kontinuumsphysik betrachtet makroskopische Körper und modelliert
die auftretenden Pänomene auf lokaler Ebene. Das heißt: Für alle Punkte
eines Körpers wird die dort stattfindende Evolution berechnet.
Die Berechnung basiert auf vier Ingredienzien: 1. Es werden die Variablen
festgelegt, die zur Beschreibung eines lokalen Körperzustandes benötigt
werden. 2. Die getroffene Wahl impliziert die zu verwendenden lokalen
Bilanzgleichungen. 3. In diesen Gleichungen treten Größen auf, die nicht
unter den Variablen zu finden sind. Diese Größen werden in materialabhängiger Weise zu den Variablen in Beziehung gesetzt, so dass explizite
Gleichungen für die Variablen entstehen. 4. Die entstehenden Gleichungen
sind meistens partielle Differentialgleichungen, die nur gelöst werden
können, wenn Anfangsdaten und Daten, die den Rand eines Körpers
beschreiben, gegeben werden.
In diesem Kapitel wird dieses Programm für einfache thermoelastische Fragestellungen durchgeführt.
1
1.2
Die Variablen bei thermoelastischen Problemen
Wir betrachen einen Körper Ω ⊂ R3 und beschreiben dessen materielle
Punkte P mittels LAGRANGE Koordinaten X = (Xi )i∈{1,2,3} bezüglich
einer Bezugskonfiguration Ω0 ⊂ R3 .
Bei thermoelastischen Problemen ist ein Körper hinreichend genau durch
Angabe der Massendichte, der drei Bewegungskomponenten und der Temperatur in jedem Punkte P gegeben.
LAGRANGE Darstellung. Bei Verwendung der folgenden Funktionen,
sprechen wir von der
LAGRANGE Darstellung der Variablen:
Massendichte:
ρ = ρ̂(t, X) ≥ 0.
(1.1)
Bewegung:
χ = (χ̂i (t, X))i∈{1,2,3} .
(1.2)
T = T̂ (t, X) ≥ 0.
(1.3)
(absolute) Temperatur:
Die Massendichte wird in der Einheit kg/m3 gemessen. Die Bewegungsfunktion hat die Einheit m. Die Einheit der absoluten Temperatur ist Kelvin.
Über den Zusammenhang zwischen der absoluten Temperatur und anderen
Temperaturmaßen werden wir in einem späteren Abschnitt noch genauer
sprechen. Schließlich gibt gemäß Abschnitt I.3.2 die Bewegungsfunktion
die Koordinaten x = (xi )i∈{1,2,3} eines materiellen Punktes P zur Zeit t an.
In der LAGRANGE Darstellung kommt die Geschwindigkeit υ̂ eines Punktes P nicht direkt in der Liste der Variablen vor, sie ist hier als Ableitung
der Bewegungsfunktion nach der Zeit definiert. Die Ableitung der Bewegungsfunktion nach den Ortskoordinaten liefert den Deformationsgradienten F = (Fij )i,j∈{1,2,3} .
υ̂i (t, X) =
∂ χ̂i
(t, X),
∂t
F̂ij (t, X) =
∂ χ̂i
(t, X).
∂Xj
(1.4)
Wir setzen voraus, dass die JACOBI Determinante der Bewegung echt
2
größer als Null ist,
J ≡ det(
∂ χ̂i
)>0,
∂Xj
(1.5)
so dass wir die Bewegungsfunktion immer nach den LAGRANGE Koordinaten auflösen können,
−1
xi = χi (t, X) ⇔ Xi = χ i (t, x) .
(1.6)
Die EULER Darstellung. Interessieren wir uns für das lokale Verhalten
eines Körpers an einem festen Raumpunkt, so nennen wir dessen Koordinaten x = (xi )i∈{1,2,3} EULER Koordinaten, und kommen zur
EULER Darstellung der Variablen:
Massendichte:
ρ = ρ(t, x) ≥ 0.
(1.7)
Geschwindigkeit:
υ = (υi (t, x))i∈{1,2,3} .
(1.8)
T = T (t, x) ≥ 0.
(1.9)
(absolute) Temperatur:
Insbesondere haben wir damit die Bewegung gegen die Geschwindigkeit als
Variable ausgetauscht. Der Zusammenhang zwischen den beiden Darstellungen folgt aus den Gleichungen
−1
ρ(t, x) = ρ̂(t, χ (t, x)) ,
−1
υ(t, x) = υ̂(t, χ (t, x)) ,
−1
T (t, x) = T̂ (t, χ (t, x)) .
(1.10)
Einsatzgebiet der beiden Darstellungen. Haben wir es auschließlich
mit einem festen Körper zu tun, ist die LAGRANGE Darstellung geeigneter
als die EULER Darstellung der Variablen. Liegen ausschließlich Flüssigkeiten oder Gase vor, gilt das Umgekehrte.
Gibt es allerdings Fest-Flüssig-Gas-Transformationen, hängt die Entscheidung für eine Darstellung vom vorliegenden Fall ab. Eine gemischte Darstellung ist aber nicht zweckmäßig.
3
1.3
Bilanzgleichungen bei thermoelastischen
Problemen
Die Gleichungen zur Bestimmung der Variablen eines thermoelastischen
Problems basieren auf den lokalen Bilanzgleichungen für Masse, Impuls
und innere Energie.
Bilanzgleichungen für reguläre Punkte in EULER Koordinaten.
Zur Herleitung dieser Gleichungen verweisen wir auf Abschnitt I.3.4 und
geben hier nur noch einmal die Resultate an.
Reguläre Bilanzgleichungen in EULER Koordinaten.
Massenbilanz:
∂
∂ρ
+ k (ρυ k ) = 0 .
∂t ∂x
Impulsbilanz:
∂ρυ i
∂
+ k (ρυ i υ k − σ ik ) = ρg i .
∂t
∂x
Bilanz der inneren Energie:
∂ρu
∂
∂υ i
+ k (ρuυ k + q k ) = σ ik k + ρr .
∂t
∂x
∂x
(1.11)
(1.12)
(1.13)
Neben den bereits eingeführten Größen treten hier auf: Der Spannungstensor σ = (σij )i,j∈{1,2,3} mit der Einheit Newton/m2 =kg/m/s2 . Der Wärmefluß q = (qi )i∈{1,2,3} hat die Einheit Nm/m2 /s. Die spezifische innere
Energie u wird in der Einheit Nm/kg gemessen. Die spezifische äußere
Kraft g = (gi )i∈{1,2,3} hat die Einheit m/s2 und die Einheit der spezifischen
Strahlungsdichte r ist Nm/kg/s.
Bilanzgleichungen für reguläre Punkte in Lagrange Koordinaten.
Diese Gleichungen haben wir bisher nicht kennengelernt. Ihre Herleitung
führen wir auf Basis der entsprechenden Gleichungen in EULER Koordinaten durch.
Zunächst zeigen wir, wie die Massenbilanz in LAGRANGE Koordinaten
ensteht. Eine Übertragung der Resultate aus Übung I.2.3 liefert die beiden
Identitäten
∂ρ
∂ ρ̂(t, X)
∂ρ
=
+ υk k
∂t
∂t
∂x
und
∂J(t, X)
∂υ k
=J k .
∂t
∂x
(1.14)
Nun wenden wir auf den zweiten Term in Gleichung (1.11) die Produktregel
an und vereinfachen die resultierenden Terme mit den Identitäten (1.14).
4
Es folgt die Massenbilanz in LAGRANGE Koordinaten
∂ ρ̂(t, X) ρ̂ ∂J(t, X)
+
=0
∂t
J
∂t
⇒
∂ ln(ρ̂J)
=0.
∂t
(1.15)
Die Integration von (1.15)2 liefert
ρ̂ =
ρ̂0
ρ̂0
,
=
∂χ
J
det( ∂X
)
(1.16)
wobei ρ̂0 die Massendichte in der Bezugskonfiguration Ω0 ist.
In LAGRANGE Koordinaten ist damit die Massendichte bereits durch die
Ableitung der Bewegungsfunktion, d.h. durch den Deformationsgradienten
bestimmt.
Zur Herleitung der Bilanzgleichungen für Impuls und innere Energie in
LAGRANGE Koordinaten benötigen wir zunächst eine Hilfsformel.
Übung 1.1 Beweise die Identität
−1
∂
ki
(J
F
)≡0.
∂X k
(1.17)
Mit der soeben bewiesenen Identität hängt die Einführung zweier neuer
Größen zusammen:
−1
Qk ≡ J F ki q i
−1
und S jk ≡ J F ki σ ij .
(1.18)
Die Größe Q = (Qk )k∈{1,2,3} heißt materieller Wärmefluß und S = (S jk )j,k∈{1,2,3}
wird 1. PIOLA-KIRCHHOFF Tensor genannt. Wir belassen es hier zunächst bei der formalen Einführung dieser Größen und verschieben deren
Interpretation auf später.
Als nächstes leiten wir die Impulsbilanz und die Bilanz der inneren Energie in LAGRANGE Koordinaten ab. Wir beginnen mit der Angabe der
Ergebnisse.
5
Reguläre Bilanzgleichungen in LAGRANGE Koordinaten.
Massenbilanz:
ρ̂0
ρ̂ =
.
(1.19)
∂χi
det( ∂X
j)
Impulsbilanz:
∂ υ̂ i ∂S ik
−
= ρ̂g i .
∂t
∂X k
Bilanz der inneren Energie:
ρ̂0
ρ̂0
ij
∂ û ∂Qk
ij ∂F
=
S
+
+ ρ̂0 r̂ .
∂t
∂xk
∂t
(1.20)
(1.21)
Zum Beweis von (1.20) starten wir mit (1.12) und schreiben die beiden
ersten Terme mittels der Massenbilanz (1.11) um. Es folgt
ρ(
∂υi
∂σik
∂υi
+υk
)−
= ρgi ,
∂t
∂xk
∂xk
bzw. ρ̂0
∂ υ̂i
∂Xj ∂σik
−J
= ρ̂0 gi . (1.22)
∂t
∂xk ∂xk
Um von (1.22)1 nach (1.22)2 zu kommen, sind drei Schritte notwendig.
1. Die Einführung der Zeitableitung von υ̂ geschieht analog zu (1.14)1 . 2.
Wir multiplizieren die Gleichung mit J und verwenden die Lösung (1.16).
3. Schließlich formen wir die Divergenz mit der Kettenregel um. Nun müssen wir nur noch die Identität (1.17) und die Definition des 1. PIOLAKIRCHHOFF Tensors verwenden, um die Impulsbilanz (1.20) in LAGRANGE Koordinaten zu erhalten.
Übung 1.2 Leite die Bilanz der inneren Energie her. Starte mit der entsprechenden Bilanz in EULER
Koordinaten. Transformiere die Zeit- und Ortsableitungen von (t, x) auf (t, X). Ersetze die
Spannung und den Wärmefluß durch die 1.
PIOLA-KIRCHHOFF Spannung und den materiellen Wärmefluß .
Verschiedene Spannungsmaße. In der EULER Version der Bilanzgleichungen tritt als Spannung eine Größe auf, die wir mit σ bezeichnet haben. Diese Spannung hat einen Namen bekommen und heißt CAUCHY
Spannung. Ingenieure nennen σ auch gern die wahre Spannung. In der LAGRANGE Version der Bilanzgleichungen tritt aber nicht σ auf, sondern
die Größe S, welche wir 1. PIOLA-KIRCHHOF Spannung genannt haben.
Und es gibt sogar noch eine weitere Spannung, nämlich die 2. PIOLA6
KIRCHHOF Spannung
−1
−1 −1
Σij ≡ J F ik S kj = J F ik F jl σ kl .
(1.23)
Alle drei Spannungen sind wichtig, haben aber unterschiedliche Aufgaben.
Die CAUCHY Spannung ist die entscheidende Größe um die Festigkeit
eines Materials zu charakterisieren. Überschreitet diese Spannung einen
kritischen Wert, setzt entweder Plastizität ein oder es kommt unmittelbar
zum Versagen des Materials. Allerdings ist die CAUCHY Spannung nicht
direkt meßbar.
Die in einer Verzerrungsapparatur auftretende Meßgröße ist bis auf einen
konstanten Faktor die 1. PIOLA-KIRCHHOF Spannung, denn diese Spannung ist proportional zur angelegten Kraft.
Aus der Definition (1.18)2 lesen wir ab, dass die 1. PIOLA-KIRCHHOF
Spannung selbst bei symmetrischer CAUCHY Spannung nicht symmetrisch
ist. Die 2. PIOLA-KIRCHHOF Spannung hat aber die gleiche Symmetrie
wie die CAUCHY Spannung. Dies ist einer der Gründe warum wir die 2.
PIOLA-KIRCHHOF Spannung in der Materialtheorie benötigen, wo wir
den materialabhängigen Zusammenhang zwischen Spannung und Verzerrung studieren.
Übung 1.3 Bekanntermaßen liefert das Produkt aus Spannung
und Fläche die Kraft. Es sei (dai )i∈{1,2,3} das Flächenelement auf der Oberfläche eines Körpers in
der aktuellen Konfiguration und (dAi )i∈{1,2,3} das
entsprechende Element in der Bezugskonfiguration.
a.) Beweise die Beziehung
σ ij daj = S ij dAj .
(1.24)
b.) Erläutere warum (S ij )i,j∈{1,2,3} proportional
zur Kraft ist. Warum reicht die Kenntnis von
(σ ij )i,j∈{1,2,3} nicht zur Berechnung der Kraft aus?
Bilanzgleichungen für singuläre Punkte in EULER Koordinaten.
Grundlage der beiden nächsten Paragraphen sind die Kapitel I-2.5 und I3.4. Wir nehmen an, dass ein Körper in der aktuellen Konfiguration Ω(t)
eine Fläche I(t) enthält, an welcher sich gewisse Größen beim Durchtritt
durch die Fläche unstetig ändern.
7
Zur genaueren Beschreibung dieses Sachverhalts gehen wir zunächst von
einer Fläche I0 ⊂ R2 , welche im Raum R3 eingebettet ist, aus. Zur Angabe
eines Ortes auf I0 führen wir zwei Familien von GAUSS Koordinatenlinien
(u1 , u2 ) ∈ I0 ein. Die Fläche I0 kann sich mit der Zeit t ≥ 0 gemäß einer
Funktion x̂ : I(t) ≡ [0, ∞) × I0 → R3 ändern. Wir schreiben
x = x̂(t, u1 , u2 ) = (x̂1 (t, u1 , u2 ), x̂2 (t, u1 , u2 ), x̂3 (t, u1 , u2 )) ,
(1.25)
und sprechen im jetzigen Kontext von der EULER Darstellung der Fläche
I(t).
Die Unstetigkeit einer Größe f kennzeichnen wir durch
f+/− (x)|x∈I ≡
lim
x∈Ω+/− →x∈I
f (x) ,
(1.26)
und definieren den Sprung und den Mittelwert von f gemäß
[[f ]] ≡ f+ − f−
1
und {f } ≡ (f+ + f− ) .
2
(1.27)
In Kapitel I-2.5 haben wir eine solche Fläche singuläre Fläche genannt.
In jedem Punkt von I(t) gibt es zwei Tangenten, den Metrik Tensor und
eine Normale.
τα =
∂ x̂
,
∂uα
gαβ = τ α · τ β ,
ν=
τ1 × τ2
εijk τ j τ k
= ( √ 1 2 )i,j,k∈{1,2,3} , (1.28)
√
g
g
mit α, β ∈ {1, 2}. Ferner ist g = det(gαβ ), und εijk ist das LEVI-CIVITA
Symbol. Die Geschwindigkeit eines Punktes von I(t) ist definiert gemäß
w=
∂ x̂
= wτα τ α + wν ν.
∂t
(1.29)
In den Anwendungen dieses Kapitels werden nur singuläre Flächen ohne Eigenleben betrachtet. Die entsprechenden Bilanzgleichungen für Masse und
Impuls haben wir bereits in Kapitel I-3.4 abgeleitet, und durch die Formeln
(I-3.70) und (I-3.71) und (I-3.72) angegeben. Die Bilanzgleichung für die
innere Energie haben wir dort nur für den Spezialfall σij = −pδij hergeleitet. Jetzt lassen wir zu, dass alle Komponenten σij ungleich Null sein
können, wollen uns aber in diesem Fall eine vereinfachende Beschränkung
auferlegen.
Wir studieren in dieser Vorlesung ausschließlich Fälle mit der
8
Stetigkeitseigenschaft gewisser Komponenten der Spannung:
([[ταi σik ν k ]])α∈{1,2} = 0.
(1.30)
In diesem Fall vereinfacht sich die Bilanz der inneren Energie auf die folgende Darstellung (1.33).
Singulären Flächenbilanzen bei Flächen ohne Eigenleben in EULER Koordinaten:
für Masse
[[ρ(υ k − wk )ν k ]] = 0 ,
(1.31)
für Impuls
[[υ i ρ(υ k − wk )ν k ]] − [[σ ik ]]ν k = 0 ,
(1.32)
für innere Energie
[[(u +
σij ν i ν j 1
+ (υ − w)2 )ρ(υ k − wk )ν k ]] + [[q k ]]ν k = 0 .
ρ
2
(1.33)
Die Bedingung (1.30) werden wir im Zusammenhang mit den Anwendungen
noch genauer besprechen.
Singuläre Fläche in der LAGRANGE Darstellung. Grundlegend für
diese Darstellung ist die
Stetigkeitseigenschaft der Bewegungsfunktion:
[[χ(t, X]] = 0.
(1.34)
In der LAGRANGE Darstellung beschreiben wir die Fläche I(t) durch eine
Funktion X̂ : IX (t) ≡ [0, ∞) × I0 → R3 , welche definiert ist durch
X = X̂(t, u1 , u2 ),
so daß gilt x̂(t, u1 , u2 ) = χ(t, X̂(t, u1 , u2 )) . (1.35)
Auch auf IX (t) gibt es in jedem Punkt zwei Tangenten, den Metrik Tensor
und den Normalenvektor.
T1 × T2
εijk T1j T2k
Gαβ = T α · T β , N = √
=( √
)i,j,k∈{1,2,3} ,
G
G
(1.36)
mit α, β ∈ {1, 2}. Entsprechend zur EULER Darstellung ist G = det(Gαβ ).
Die Geschwindigkeit eines Punktes von IX (t) ist definiert durch
∂ X̂
,
Tα =
∂uα
W =
∂ X̂
= Wτα T α + WN N .
∂t
9
(1.37)
Die angenommene Stetigkeit (1.34) der Bewegungsfunktion impliziert die
für Anwendungen nützlichen HADAMARD Relationen. Diese lauten
[[F ij ]] = ai N j ,
[[υ i ]] = −WN [[F ij ]]N j .
(1.38)
Übung 1.4 Beweise die HADAMARD Relationen.
Die folgenden Formeln verknüpfen einige Größen in der EULER Darstellung mit den entsprechenden Größen in der LAGRANGE Darstellung.
Übung 1.5 Beweise die Behauptungen:
a.)
r
k
N =
g 1
ik
F+/−
νi .
G J+/−
(1.39)
b.)
r
WN =
g 1
k
(wν − υ+/−
ν k ).
G J+/−
(1.40)
c.)
−1
[[J F ki ]]N k = 0.
(1.41)
d.) Erläutere den Zusammenhang zwischen (1.41)
und (1.17).
10
Bilanzgleichungen für singuläre Punkte in LAGRANGE Koordinaten. Nach den Vorbereitungen im letzten Paragraphen ist die Ermittlung der singulären Flächenbilanzen nicht schwer.
Singulären Flächenbilanzen bei Flächen ohne Eigenleben in LAGRANGE Koordinaten:
für Masse
[[ρ̂J]] = 0 ,
(1.42)
für Impuls
−WN [[ρ0 υ̂ i ]] − [[S ik ]]N k = 0 ,
(1.43)
für innere Energie
−WN ([[ρ0 ûδ jk − F ij S ik ]]N i N j + {F ij N j }[[S ik N k ]]) + [[Qk ]]N k = 0 .
(1.44)
Übung 1.6 a.) Beweise die singulären Bilanzgleichungen für
Masse und Impuls durch Analogieschluß aus den
entsprechenden Bilanzgleichungen in EULER Koordinaten und mit Hilfe der Formeln aus Übung
1.5.
b.) Beweise die Bilanzgleichung der inneren Energie. Zeige analog zu Teil a.) dieser Übung, dass die
singuläre Bilanzgleichung der Energie lautet
1
−WN [[ρ0 (û+ υ̂ 2 )]]+[[Qk − υ̂ i S ik ]]N k = 0. (1.45)
2
Leite hieraus die singuläre Bilanzgleichung der
inneren Energie (1.35) her. Verwende die HADAMARD Relationen und forme die Klammer
[[υ̂ i S ik ]]N k um mittels der nützlichen Hilfsformel
[[ab]] = [[a]]{b} + {a}[[b]] .
11
(1.46)
1.4
Einführung in die Materialtheorie am Beispiel des thermoelastischen Festkörpers
Grundlegendes. Wir betrachten einen Festkörper Ω(t) mit der Bezugskonfiguration Ω0 . Die Bestimmung seiner Variablen
ρ̂(t, X) −Massendichte,
χ̂(t, X) −Bewegung,
T̂ (t, X) −Temperatur
(1.47)
basiert auf den Bilanzgleichungen für Masse, Impuls und Energie, und auf
zusätzlichen Gleichungen, welche die Spannung σ, den Wärmefluß q und
die innere Energie u zu den Variablen in Beziehung setzten.
Diese zusätzlichen Gleichungen heißen Materialgleichungen, weil sie für unterschiedliche Materialien unterschiedlich sind. Dagegen sind die Bilanzgleichungen für Masse, Impuls und Energie materialunabhängig.
Ein thermoelastischer Festkörper ist definiert durch einen symmetrischen
Spannungstensor, d.h.
σ = σT ,
(1.48)
und durch folgende Struktur der Materialgleichungen:
σ(t, X) = σ̃(χ(t, X), F (t, X), T (t, X), Θ(t, X)),
q(t, X) = q̃(χ(t, X), F (t, X), T (t, X), Θ(t, X)),
u(t, X) = ũ(χ(t, X), F (t, X), T (t, X), Θ(t, X)),
(1.49)
(1.50)
(1.51)
mit F = ∇X χ und Θ = ∇X T .
Diese Abängigigkeiten geben intuitive Vermutungen wieder, welche aus der
Erfahrung gewonnen werden müssen. Die Massendichte tritt hier nicht auf,
da sie bereits durch det(∇X χ) gegeben ist.
In jeder der 10 Funktionen haben wir den gleichen Satz von möglichen Abhängigkeiten aufgeführt. Dieses strategische Prinzip heißt Equipräsenzprinzip. Es wird in der Materialtheorie gern zur Vermeidung von Vorurteilen
verwendet.
Die Aufgabe der Materialtheorie besteht nun im Auffinden von Restriktionen an die Materialfunktionen, um deren Allgemeinheit möglichst weit
einzuschränken. Hierzu verwendet die Materialtheorie drei Prinzipien:
1. Prinzip der materiellen Objektivität
2. Prinzip der materiellen Symmetrie
12
3. 2ter Haupsatz der Thermodynamik
Die Prinzipien 1 und 3 sind von universeller Natur. D.h. die Materialgleichungen beliebiger Stoffe müssen diesen Prinzipien gehorchen. Das Prinzip
der materiellen Symmetrie ist dagegen materialabhängig. Es reduziert die
Materialfunktionen aufgrund eventuell vorliegender Symmetrien im Material.
Nach Auswertung der drei Prinzipien liegen relativ konkrete Materialfunktionen vor. Was in dann noch unbestimmt ist, muss durch Messungen oder
aus mikroskopischen Theorien bestimmt werden.
Prinzip der materiellen Objektivität. Wir untersuchen das Verhalten
von Spannung, Wärmefluß und innerer Energie bei EUKLID Transformationen des Beobachters:
t∗ = t,
x∗i = Oij (t)xj + bi (t),
O(t)O(t)T = 1,
det(O) = 1.
(1.52)
Hier sind (x∗1 , x∗2 , x∗3 ) bzw. (x1 , x2 , x3 ) die Komponenten eines Ortsvektors
x mit bezug auf zwei rechtwinklig kartesische Koordinatenlinien, deren
Ursprünge durch den Vektor b verbunden sind, und die mittels der orthogonalen Matrix O gegeneinander gedreht sind.
Abbildung 1.1: Darstellung zur Formulierung des Prinzips der materiellen
Objektivität.
Das Transformationverhalten der Materialgrößen σ, q und u haben wir
bereits in I-4.3 studiert. Es gilt
σij∗ = Oik Ojl σkl ,
qi∗ = Oij qj ,
u∗ = u,
(1.53)
d.h., die (CAUCHY) Spannung ist ein objektiver Tensor 2. Stufe, der Wärmefluß transformiert sich wie ein objektiver Vektor und die spezifische
innere Energie ist ein objektiver Skalar.
13
Erinnere, dass σ und q sich bei EUKLID Transformation nicht ändern, nur
deren Komponenten ändern sich, weil sie aus verschiedenen Blickwinkeln
beobachtet werden. Trotzdem werden wir der Übersichtlichkeit wegen in
diesem Kapitel die Formeln (1.53) wie folgt schreiben,
σ ∗ = OσO T ,
q = Oq,
u∗ = u.
(1.54)
Als nächstes geben wir die Transformationsformeln der in den Materialfunktionen auftretenden Größen an.
χ∗ = Oχ + b,
F ∗ = OF ,
T ∗ = T,
Θ∗ = Θ.
(1.55)
Damit haben wir die notwendigen Informationen zusammengetragen, um
das Prinzip der materiellen Objektivität formulieren und auswerten zu können.
Hierzu stellen wir uns vor, dass wir die Materialgleichungen (1.49) - (1.51)
nicht im Ausgangssystem bestimmen wollen, sondern in einem System,
welches aus diesem durch die EUKLID Transformation (1.52) hervorgeht.
Hier schreiben wir
σ ∗ (t, X) = σ̃ ∗ (χ∗ (t, X), F ∗ (t, X), T ∗ (t, X), Θ∗ (t, X)),
q ∗ (t, X) = q̃ ∗ (χ∗ (t, X), F ∗ (t, X), T ∗ (t, X), Θ∗ (t, X)),
u∗ (t, X) = ũ∗ (χ∗ (t, X), F ∗ (t, X), T ∗ (t, X), Θ∗ (t, X)).
(1.56)
(1.57)
(1.58)
Es ist sicherlich nicht absurd anzunehmen, dass die Materialfunktionen im
* System, nämlich σ̃ ∗ , q̃ ∗ , ũ∗ , andere sein werden als die entsprechenden
Funktionen σ̃, q̃, ũ, die wir im Ausgangssystem vorfinden.
Dies jedoch verneint das
Prinzip der materiellen Objektivität:
In jedem beliebigen EUKLID System haben die Materialfunktionen die
gleiche Form.
Mit anderen Worten: In den Materialgleichungen (1.56) - (1.58) müssen wir
den * an den Funktionssymbolen entfernen.
σ ∗ (t, X) = σ̃(χ∗ (t, X), F ∗ (t, X), T ∗ (t, X), Θ∗ (t, X)),
q ∗ (t, X) = q̃(χ∗ (t, X), F ∗ (t, X), T ∗ (t, X), Θ∗ (t, X)),
u∗ (t, X) = ũ(χ∗ (t, X), F ∗ (t, X), T ∗ (t, X), Θ∗ (t, X)).
(1.59)
(1.60)
(1.61)
Zur Auswertung des Prinzips der materiellen Objektivität gehen wir von
(1.54) aus und setzen dort die Materialgleichungen (1.49) - (1.51) sowie
14
(1.59) - (1.61) ein. Anschließend ersetzen wir die Variablen des * Systems
über (1.55) durch die Variablen im Ausgangssystem. Es folgt
σ̃(χ, F , T, Θ) = O T σ̃(Oχ + b, OF , T, Θ)O,
q̃(χ, F , T, Θ) = O T q̃(Oχ + b, OF , T, Θ),
ũ(χ, F , T, Θ) = ũ(Oχ + b, OF , T, Θ).
(1.62)
(1.63)
(1.64)
Dies sind Funktionalgleichungen, die gemäß dem Prinzip der materiellen
Objektivität in jedem EUKLID System gelten müssen. Insbesondere müssen sie deshalb gelten für beliebige Wahlen von O und b.
Beispielsweise wählen wir punktweise in Ω0 : O = 1 und b = −χ. Mit dieser
Wahl erhalten wir
σ̃(χ, F , T, Θ) = σ̃(0, F , T, Θ),
q̃(χ, F , T, Θ) = q̃(0, F , T, Θ),
ũ(χ, F , T, Θ) = ũ(0, F , T, Θ).
(1.65)
(1.66)
(1.67)
Wir erkennen, dass sich die Werte der Materialgrößen nicht ändern, obwohl
wir χ ändern. Also dürfen die Materialfunktionen von der Bewegungsfunktion überhaupt nicht abhängen.
Mit diesem Wissen gehen wir wieder zurück zu (1.62) - (1.64) und treffen eine weitere Wahl. Erinnere hierzu an das polare Zerlegungstheorem
aus I-3.1, wonach gilt F = RU mit RRT = 1 und der positiv definiten
Streckungsmatrix U = U T .
Wir wählen jetzt punktweise O = RT und erhalten
σ̃(F , T, Θ) = Rσ̃(U , T, Θ)RT ,
q̃(F , T, Θ) = Rq̃(U , T, Θ),
ũ(F , T, Θ) = ũ(U , T, Θ).
(1.68)
(1.69)
(1.70)
Dieses Ergebnis bedeutet eine starke Reduktion der ursprünglich angenommenen Materialfunktionen. 1. Die Abhängigkeit der Spannung und des
Wärmeflusses vom Rotationsanteil des Deformationsgradienten ist nun explizit und die innere Energie kann hiervon überhaupt nicht abhängen. 2. In
den verbleibenden Funktionen stehen nun nicht mehr die neun Komponenten des Deformationsgradienten, sondern nur noch die sechs unabhängigen
Komponenten der symmetrischen Streckungsmatrix.
Für den hier betrachteten thermoelastischen Festkörper haben wir damit
das Prinzip der materiellen Objektivität voll ausgewertet. Wegen R =
15
O T R∗ und U = U ∗ gibt es nämlich keine weitere Wahl, die zu weiteren
Einschränkungen führen kann.
Übung 1.7 a.) Beweise die letzte Behauptung.
b.) Zeige, dass der 2. PIOLA-Kirchhoff Spannungstensor und der materielle Wärmefluß nicht vom
Rotationsanteil des Deformationsgradienten abhängen, so dass wir mit C = U 2 schreiben können
Q = Q̃(C, T, Θ),
Σ = Σ̃(C, T, Θ).
(1.71)
Transformation der Bezugskonfiguration. In diesem Paragraphen werden wir einen Wechsel der Bezugskonfiguration vornehmen und die Auswirkungen auf die Materialfunktionen studieren. Das im letzten Paragraphen
behandelte Prinzip der materiellen Objektivität bezog sich dagegen auf
einen Wechsel des Beobachters bei fester Bezugskonfiguration.
Zur Vereinfachung der Diskussion werden wir ausschließlich homogene Bezugskonfigurationen betrachten, nämlich solche, wo der Zustand eines Festkörpers homogen ist.
Wir gehen aus von einer Bezugskonfiguration Ω0 , in welcher die materiellen Punkte rechtwinklig kartesische Koordinaten X = (X i )i∈{1,2,3} haben.
Mittels der Abbildung
Y = Ŷ (X)
(1.72)
führen wir Ω0 in eine neue Bezugskonfiguration Ω̂0 über. Hier hat ein materielles Teilchen, welches in Ω0 die Koordinaten X hatte, die Koordinaten
Y = (Yi )i∈{1,2,3} .
Dieser Wechsel der Bezugskonfiguration soll sich nicht auf die Werte der
Variablen zur Zeit t auswirken. Es soll also gelten
ρΩ0 (t, X) = ρΩ̂0 (t, Y ), χΩ0 (t, X) = χΩ̂0 (t, Y ), TΩ0 (t, X) = TΩ̂0 (t, Y ).
(1.73)
Natürlich ändern sich dann auch die Werte der Materialgrößen σ, q und u
nicht.
σ Ω0 (t, X) = σ Ω̂0 (t, Y ), q Ω0 (t, X) = q Ω̂0 (t, Y ), uΩ0 (t, X) = uΩ̂0 (t, Y ).
(1.74)
Die durchgeführte Transformation ruft aber eine Veränderung der Gradi16
Abbildung 1.2: Darstellung zur Formulierung dss Prinzips der materiellen
Symmetrie.
enten von Bewegung und Temperatur hervor. Es gilt insbesondere
C Ω0 = P T C Ω̂0 P , ΘΩ0 = ΘΩ̂0 P , mit P = ∇X Ŷ (X).
(1.75)
Wegen (1.74)1,2 und aufgrund der Definitionsgleichungen (1.23) und (1.18)1
ändern auch der 2. PIOLA-KIRCHHOF Tensor und der materielle Wärmefluß ihre Werte.
−1 −1
−1
T
−1 −1
ΣΩ0 (t, X) = det( P ) P ΣΩ̂0 (t, Y )P , QΩ0 (t, X) = det( P ) P QΩ̂0 (t, Y ).
(1.76)
Im allgemeinen ändern sich die Materialfunktionen beim Wechsel Ω0 → Ω̂0
auch. Deshalb schreiben wir in Ω0
ΣΩ0 (t, X) = Σ̃Ω0 (C Ω0 (t, X), TΩ0 (t, X), ΘΩ0 (t, X))
QΩ0 (t, X) = Q̃Ω0 (C Ω0 (t, X), TΩ0 (t, X), ΘΩ0 (t, X))
uΩ0 (t, X) = ũΩ0 (C Ω0 (t, X), TΩ0 (t, X), ΘΩ0 (t, X)),
(1.77)
(1.78)
(1.79)
ΣΩ̂0 (t, Y ) = Σ̃Ω̂0 (C Ω̂0 (t, Y ), TΩ̂0 (t, Y ), ΘΩ̂0 (t, Y ))
(1.80)
QΩ̂0 (t, Y ) = Q̃Ω̂0 (C Ω̂0 (t, Y ), TΩ̂0 (t, Y ), ΘΩ̂0 (t, Y ))
uΩ̂0 (t, Y ) = ũΩ̂0 (C Ω̂0 (t, Y ), TΩ̂0 (t, Y ), ΘΩ̂0 (t, Y )).
(1.81)
(1.82)
und in Ω̂0
Prinzip der materiellen Symmetrie. Der soeben beschriebene Wechsel
der Bezugskonfiguration bringt als solcher natürlich keine neuen Erkenntnisse. Es gibt aber Materialien, die gewisse Größen konservieren, unabhängig davon, von welcher Bezugskonfiguration wir starten.
17
Dieses Phänomen kann auch bei den hier betrachten Festkörpern auftreten,
aber nur bei einer sehr speziellen Klasse von Bezugskonfigurationen.
Dies sind Rotationen des Festkörpers. Deshalb betrachten wir jetzt Gruppen, wo der Wechsel Ω0 → Ω̂0 durch eine Rotation erzeugt wird. Die maximale Rotationsgruppe SO(3) enthält beliebige Rotationen. Wir setzen
P =W
mit W W T = 1,
det(W ) = 1 und W ∈ Υ ⊂ SO(3).
(1.83)
Wenn sich bei dieser Transformation die Materialfunktionen beim Wechsel von (1.77)-(1.79) nach (1.80)-(1.82) nicht ändern, d.h., die Funktionen
hängen in Ω̂0 von dem Variablensatz C Ω̂0 , TΩ̂0 , ΘΩ̂0 in gleicher Weise ab,
wie von C Ω0 , TΩ0 , ΘΩ0 in Ω0 , liegt eine materielle Symmetrie vor.
Prinzip der materiellen Symmetrie:
Verhält sich ein Festkörper invariant gegen eine Rotation
W ∈ Υ ⊂ SO(3) seiner homogenen Bezugskonfiguration, so liegt
eine materielle Symmetrie vor.
In diesem Fall unterliegen die Materialfunktionen eines thermoelastischen
Festkörpers den Bedingungen
W Σ̃(C, T, Θ)W T = Σ̃(W CW T , T, W Θ),
W Q(C, T, Θ) = Q̃(W CW T , T, W Θ),
u(C, T, Θ) = ũ(W CW T , T, W Θ).
(1.84)
(1.85)
(1.86)
Die Auswertung dieser Bedingungen werden wir für konkrete Fälle in einem
nachfolgenden Paragraphen durchführen.
2ter Hauptsatz der Thermodynamik. Weitere Einschränkungen der
Materialfunktionen resultieren aus der Thermodynamik. Die Resultate wollen wir in dieser Vorlesung aber nicht herleiten, sondern nur angeben.
Wir gehen aus von den Materialfunktionen des thermoelastischen Festkörpers in der Form
Σ(t, X) = Σ̃(C(t, X), T (t, X), Θ(t, X)),
Q(t, X) = Q̃(C(t, X), T (t, X), Θ(t, X)),
u(t, X) = ũ(C(t, X), T (t, X), Θ(t, X)).
Dann sagt der
18
(1.87)
(1.88)
(1.89)
2te Hauptsatz der Thermodynamik:
1. Spannung und innere Energie können nicht vom Temperaturgradienten
abhängen. Es gibt nämlich eine spezifische freie Energie ψ, die durch eine
Materialfunktion der Form
ψ = ψ̃(C, T )
(1.90)
gegeben ist, und es gilt
Σ = 2ρ0
∂ ψ̃(C, T )
∂C
sowie u = ψ̃(C, T ) − T
∂ ψ̃(C, T )
.
∂T
(1.91)
2. Der Wärmefluß genügt der Ungleichung
1
Q · ∇( ) ≥ 0,
T
(1.92)
wobei das Gleichheitszeichen im Gleichgewicht gilt. In Worten: Wärme
kann von selbst nur von hoher Temperatur zu einer niedrigeren Temperatur fließen.
Die Dichte ρ0 ψ wird in der Mechanik häufig auch gespeicherte Energie
genannt.
Weitere Einschränkungen an die Materialfunktionen folgen unmittelbar aus
den Bedingungen (1.91). Hierzu differenzieren wir beide Gleichungen nach
C. Es folgt
∂Σij
∂Σkl
=
∂Ckl
∂Cij
und
ρ0 ∂u
∂Σij
= Σij − T
.
2 ∂Cij
∂T
(1.93)
Die Auswertung von (1.93)1 werden wir zusammen mit den Bedingungen,
die aus dem Prinzip der materiellen Symmetrie fließen, in einem späteren
Paragraphen vornehmen.
Die Bedingung (1.93)2 besagt, dass bei Kenntnis des Spannungs-Verzerrungs
Gesetzes bereits festliegt, wie die innere Energie vom rechten CAUCHYGREEN Tensor abhängt. Diese Abhängigkeit darf also nicht unabhängig
gemessen werden. Insbesondere gilt: Ist die Spannung eine lineare und homogene Funktion der Temperatur, dann ist die innere Energie unabhängig
von C.
In den nächsten Paragraphen werden wir einfache Materialgesetze für thermoelastische Festkörper explizit angeben und anhand ausgewählter Beispiele studieren.
19
Das KIRCHHOFF-ST.VENANT Gesetz, Teil 1: Formulierung.
Wir betrachten einen thermoelastischen Festkörper, der sich aufgrund von
thermischer Ausdehnung und elastischer Deformation verformt. Zur Aufstellung des Spannungs-Verzerrungs Gesetzes, welches beide Phänomene
enthält, zerlegen wir das Problem gedanklich in zwei Teile.
Abbildung 1.3: Einführung eines Zwischenzustandes zur Beschreibung einer kombinierten Verformung aus thermischer Ausdehnung und elastischer
Deformation.
Wir gehen aus von einer Bezugskonfiguration
Ω0
mit T0 ,
F0 = 1,
σ0 = −p0 1.
(1.94)
Nun stellen wir uns vor, dass dem Körper Wärme bei fester Bezugsspannung zugeführt wird, so dass sich die Temperatur von T0 auf T ändert.
Hierdurch verzerrt sich der Körper und nimmt eine neue Konfiguration
ein, die wir Zwischenkonfiguration Ωz nennen. Wir nehmen an, dass die
der Deformationsgradient eine lineare Funktion der Temperaturdifferenz
ist und schreiben
Ωz
mit T,
Fth = 1 + α(T − T0 ),
σ0 = −p0 1.
(1.95)
Die Größe α ist eine 3 × 3 Matrix und heißt Matrix der thermischen Ausdehnungskoeffizienten.
Die materiellen Teilchen in der Zwischenkonfiguration Ωz kennzeichnen wir
durch rechtwinklige Koordinaten X z . Von dieser Konfiguration ausgehend
20
erzeugen wir bei fester Temperatur durch äußere Kräfte elastische Verzerrungen und enden in der aktuellen Konfiguration
Ωt
mit T,
Fel ,
σ0 6= −p0 1.
(1.96)
Auf Grundlage dieser Konstruktion werden wir jetzt ein lineares SpannungsVerzerrungs-Gesetz für die 2. PIOLA-KIRCHHOFF Spannung formulieren.
Hierzu verwenden wir die drei Bewegungsfunktionen
x = χ(t, X),
X z = χz (t, X),
x = χel (t, X z ).
(1.97)
Es folgt durch Anwendung der Kettenregel
F ij =
∂χi
∂χiel ∂χkz
kj
.
=
= Felik Fth
j
k
j
∂X
∂Xz ∂X
(1.98)
Als Folge unserer Konstruktion ergeben sich zwei Darstellungen der CAUCHY
Spannung, nämlich
σ ij =
1 im jn mn
F F Σ
J
und σ ij =
1 im jn mn
F F z .
Jel el el
(1.99)
Wobei sich Σ auf die Bezugskonfiguration Ω0 und z auf die Zwischenkonfiguration Ωz bezieht. Elimination der CAUCHY Spannung liefert
−1
−1
Σij = Jz Fzim Fzjn z mn .
(1.100)
Für die 2. PIOLA-KIRCHHOFF Spannung z formulieren wir jetzt ein rein
elastisches ST. VENANT-KIRCHHOFF Gesetz:
−1
1
z ij = −p0 Jel C ij el + K̃ ijkl (Celkl − δ kl ).
2
(1.101)
Hier ist K̃ ijkl die eventuell temperaturabhängige Steifigkeitsmatrix des Materials. Der Faktor am Referenzdruck p0 wurde so eingeführt, dass dieser
als −p0 δ ij in die CAUCHY Spannung eingeht.
Schließlich berechnen wir mittels (1.100) das
ST. VENANT-KIRCHHOFF Gesetz mit thermischer Ausdehnung:
−1
1
kl
),
(1.102)
Σij = −p0 J C ij + K ijkl (C kl − Cth
2
mit
kl
Cth
=
mk ml
Fth
Fth ,
K
ijkl
=
−1 −1 −1 −1
im jn ko lp mnop
Jth Fth
Fth Fth Fth K̃
.
21
(1.103)
Das ST. VENANT-KIRCHHOFF Gesetz ist gültig, falls die Verzerrungen
im Material klein sind. Dagegen dürfen die lokalen Rotationen beliebig
groß sein. Allerdings ist dieses Gesetz zur Beschreibung der Gummielastizität mit seinen großen Verzerrungen nicht geeignet.
Die im ST. VENANT-KIRCHHOFF Gesetz auftretende Steifigkeitsmatrix
hat zunächst 34 =81 Elemente. Allerdings folgt aus den Symmetrien der
2. PIOLA-KIRCHHOFF Spannung und des rechten CAUCHY-GREEN
Tensors, dass gilt
K ijmn = K jimn ,
K ijmn = K ijnm .
(1.104)
Darüber hinaus liefert der 2te Hauptsatz der Thermodynamik
K ijmn = K mnij .
(1.105)
Übung 1.8 Leite diese Bedingungen her, und zeige, dass sich
die 81 Elemente der Steigkeitsmatrix auf 21 unabhängige Elemente reduzieren.
Das KIRCHHOFF-ST.VENANT Gesetz, Teil 2: Materielle Symmetrien. Liegt in einem gegebenen Material in einer homogenen Bezugskonfiguration eine materielle Symmetrie vor, dann können wir die Bedingungen (1.85) auf das KIRCHHOFF-ST.VENANT Gesetz anwenden, und
erhalten weitere Einschränkungen an die verbleibenden 21 unabhängigen
Elemente der Steifigkeitsmatrix.
Wir beginnen mit den Symmetriebedingungen (1.85)
W Σ̃(C, T, )W T = Σ̃(W CW T , T ) mit W ∈ Υ ⊂ SO(3),
(1.106)
und setzen hier das ST. VENANT-KIRCHHOFF Gesetz ein. Es folgt
op
rs
W im W jn K mnrs (C rs − Cth
) = K ijmn W mo W np (C op − Cth
).
(1.107)
Dies muß für beliebige Verzerrungen gelten, also erhalten wir
W im W jn K mnrs = K ijmn W mr W ns
mit W ∈ Υ ⊂ SO(3).
(1.108)
Übung 1.9 Versuche eine Herleitung der Symmetriebedingungen (1.107) im Invariantenkalkül. Erläutere ausführlich die hierbei gemachten Erfahrungen.
22
Verhält sich ein Material invariant gegen beliebige Drehungen der homogenen Bezugskonfiguration, d.h. Υ = SO(3), dann sprechen wir von einem
isotropen Material. In diesem Fall hat die Steifigkeitsmatrix nur 2 unabhängige Elemente, denn aus den Symmetriebedingungen (1.107) folgt die
Darstellung
K ijkl = λδ ij δ kl + µ(δ ik δ jl + δ il δ jk ).
(1.109)
Die Größen λ und µ heißen LAME Koeffizienten.
Verhält sich ein Material nur invariant gegen 90◦ Drehungen der homogenen Bezugskonfiguration, dann hat es kubische Anisotropie. Hier hat die
Steifigkeitsmatrix 3 unabhängige Elemente, denn aus den Symmetriebedingungen (1.107) folgt die Darstellung
K ijkl = λδ ij δ kl + µ(δ ik δ jl + δ il δ jk ) + µ0 δ ijkl ,
(1.110)
mit δ 1111 = δ 2222 = δ 3333 = 1 und δ ijkl = 0 sonst. Die Größe µ0 heißt
Anisotropiefaktor.
Der Beweis dieser Darstellungen ist einfach aber lang. In Übung 1.10 wird
zur Erläuterung der Beweismethode ein einfacheres Beispiel betrachtet.
Bei tetragonaler Symmetrie, z.B. im Zinn, enden wir mit sechs, und bei
hexagonaler Symmetrie, z.B. im Eisenphosphat, gibt es sogar neun elastischen Konstanten. Diese Fälle betrachten wir in dieser Einführung in die
Materialtheorie aber nicht.
Das HOOKE Gesetz der linearen Elastizitätstheorie mit thermischer Ausdehnung, Teil1: Formulierung. Grundlage des Elastizitätsgesetzes nach HOOKE ist eine Linearisierung des ST. VENANTKIRCHHOFF Gesetzes und insbesondere des rechten CAUCHY-GREEN
Tensors. Hierzu führen wir die Verschiebung U = (U i )i∈{1,2,3} eines materiellen Punktes ein. Diese ist definiert durch
χi (t, X) = X i + Û i (t, X).
(1.111)
Hiermit berechnen wir den Deformationsgradienten und den rechten CAUCYGREEN Tensor. Es folgt
F
ij
∂U i
,
=δ +
∂X j
ij
∂U i
∂U j
∂U k ∂U k
C =δ +
+
+
.
∂X j ∂X i ∂X i ∂X j
ij
ij
(1.112)
Der entscheidende Schritt, der zur linearen Elastizitätstheorie führt, besteht
in der Näherung
C ij ≈ δ ij + 2eij
∂U j
1 ∂U i
+
).
mit eij = (
2 ∂X j ∂X i
23
(1.113)
Die neu eingeführte Größe e = (eij )i,j∈{1,2,3} heißt Verzerrung.
Die Approximation (1.113) wird geometrische Linearisierung genannt, im
Unterschied zur Linearität des ST.VENANT-KIRCHHOFF Gesetzes, welches ein lineares Gesetz zwischen der 2. PIOLA-KIRCHHOFF Spannung
und der Streckung annimmt. Diese Linearisierung schränkt die Anwendungbarkeit auf kleine Streckungen ein, während die geometrische Linearisierung bedingt, dass Differenzen X (P ) − X (Q) zwischen zwei materiellen
Punkten P und Q auch nur kleine Drehungen erleiden dürfen. Ist φ der
Rotationswinkel, dann muß für die Anwendbarkeit von (1.113) gelten:
sin(φ) ≈ φ. Diese wichtige Restriktion wird häufig in den Anwendungen
ignoriert. Wir kommen in einer folgenden Übung hierauf zurück.
Dagegen sind die weiteren Näherungen, die vom ST.VENANT-KIRCHHOFF
Gesetz zur linearen Elastizitätstheorie führen, in ihren Auswirkungen relativ harmlos: Es wird grundsätzlich alles in ∇U und in T − T0 linearisiert.
Insbesondere auch der Übergang von der 2. PIOLA-KIRCHHOFF Spannung zur CAUCHY Spannung. Hieraus folgt das
HOOKE Gesetz mit thermischer Ausdehnung:
σ ij = −p0 δ ij + K ijkl (ekl − ekl
th ),
(1.114)
1 kl
lk
mit ekl
th = (α + α )(T − T0 ).
2
(1.115)
Beachte, dass wegen
−1
i
i
U (t, x) = Û (t, X) folgt
∂U i
∂ Û i ∂ χk
∂ Û i
=
=
+O(|∇U |2 ). (1.116)
j
k
j
j
∂x
∂X ∂x
∂X
Im Rahmen dieser vollständigen Linearisierung ist es also außerdem egal,
ob nach x oder X abegleitet wird.
Das HOOKE Gesetz der linearen Elastizitätstheorie mit thermischer Ausdehnung, Teil2: Isotrope Symmetrie. Wir haben bereits
gesehen, dass ein isotroper elastischer Festkörper durch die zwei LAME
Konstanten beschrieben wird, siehe (1.110). Aber auch die Matrix der thermischen Ausdehnungskoeffizienten bekommt hier eine besonders einfache
Form.
24
Übung 1.10 a.) Zeige, dass bei Vorliegen materieller Symmetrie die Matrix der thermischen Ausdehnungskoeffizienten der folgenden Symmetriebedingung unterworfen ist.
αij = W ik W jl αkl
für W ∈ Υ ⊂ SO(3).
(1.117)
b.) Zeige, dass bei materieller Isotropie folgt
αij = αδ ij .
(1.118)
Nach diesen Vorbereitungen geben wir das HOOKE Gesetz des isotropen
thermoelastischen Festkörpers an:
σ ij = −p0 δ ij + λ(ekk − 3α(T − T0 ))δ ij + 2µ(eij − α(T − T0 )δ ij ) (1.119)
Für einen isothermen Prozeß resultiert das klassische HOOKE Gesetz
σ ij = −p0 δ ij + λekk δ ij + 2µeij .
(1.120)
Anstelle der LAME Koeffizienten verwendet der angewandte Mechaniker
lieber den E-Modul E, bzw. den Schubmodul G oder die Querkontraktionszahl ν an. Diese hängen bei isotroper Symmetrie mit den LAME Koeffizienten zusammen gemäß
E=µ
2µ + 3λ
,
µ+λ
G = µ,
ν=
λ
.
2(λ + µ)
(1.121)
Übung 1.11 a.) Stelle das klassische isotrope HOOKE Gesetz
nach den Verzerrungen um, und schreibe das Resultat für alle Komponenten bezüglich kartesischer
Koordinaten auf.
b.) Führe die Größen E, G und ν ein, und gib
anschauliche Erklärungen für die Bedeutungen von
E-Modul, Schubmodul und Querkontraktionszahl.
25
Übung 1.12 Nimm an, dass der gezeichnete Festkörper über
das isotrope klassische HOOKE Gesetz beschrieben werden kann. Betrachte die in der Skizze angegebene Bewegung, welche ausschließlich aus einer
Rotation um 45◦ besteht.
a.) Berechne den Verschiebungsgradienten und
durch Anwendung des HOOKE Gesetzes die resultierenden Spannungen.
b.) Erläutere ausführlich das Schicksal des Körpers
als Folge des HOOKE Gesetzes. Benenne die Ursachen.
1.5
Ausgewählte Anwendungen zur Thermoelastizität
In diesem Abschnitt werden wir konkrete Beispiele zur Thermoelastizität
durch Lösen von Anfangs- und Randwertproblemen behandeln. Diese basieren auf den Bilanzgleichungen für Masse, Impuls und Energie sowie auf
Materialgleichungen aus dem Umfeld des letzten Abschnittes.
Der Flüssig-Fest Phasenübergang in einer ruhenden Flüssigkeit.
Wir betrachten einen tiefen Sees mit Oberfläche bei x = 0, und nehmen
dessen Grund bei x → ∞ an. Zunächst hat das Wasser die konstante
Temperatur TA . Die Schmelztemperatur des Wassers bezeichnen wir mit
TS . Ab der Zeit t = 0 stellt sich eine konstante Oberflächentemperatur
T0 < TS ein, so dass eine Eisschicht zu wachsen beginnt. Für t > 0 liegen
also zwei zeitabhängige Gebiete vor mit Eis (E) und Wasser (W) vor, die
durch eine singuläre Fläche bei xI (t) getrennt werden. Es gilt xI (0) = 0.
Wassersäule mit
darüber liegender
Eisschicht.
26
Wir nehmen an, dass sowohl das Eis als auch das Wasser ruhen und gehen
von einer konstanten Dichte aus. Ebenfalls ignorieren wir den Dichteunterschied zwischen Eis und Wasser. Das Ziel ist die Bestimmung der Temperaurfelder TE (t, x), TW (t, x) und die Lage xI (t) der Phasengrenze zwischen
Eis und Wasser.
In einer ruhenden Flüssigkeit mit konstanter Dichte ist die Massenbilanz
identisch erfüllt. Die Impulsbilanz liefert bei konstanter Dichte, dass der
Druck p eine lineare Funktion der Wassertiefe ist. Wir müssen also lediglich
die Bilanz der inneren Energie in den Gebieten E und W sowie auf der
singulären Fläche auswerten.
ρ
∂u ∂q
+
= 0,
∂t
∂x
p
−ẋI ρ[[u + ]] + [[q]] = 0.
ρ
(1.122)
Als Materialgleichungen für Eis und Wasser verwenden wir für die spezifische innere Energie die einfache kalorische Zustandsgleichung
uE = cE (TE − TS ),
uW = cW (TW − TS ) + uR ,
(1.123)
und für den Wärmefluß das FOURIER Gesetz
qE = −κE
∂TE
,
∂x
qW = −κW
∂TW
.
∂x
(1.124)
Hier sind cE , cW die spezifischen Wärmen für Eis und Wasser, und deren
Wärmeleitfähigkeiten sind mit κE , κW bezeichnet. Als Referenztemperatur
haben wir TS gewählt und die Referenzenergie des Eises auf Null gesetzt.
Dann ist die Referenzenergie des Wassers um die Schmelzwärme höher.
Die Größe λ = uR + pR /ρR kann der Wassertabelle entnommen werden
und wird häufig latente Wärme genannt. Schließlich führen wir noch die
Konstante a2 = κ/(ρc) ein, welche thermische Leitfähigkeit genannt wird.
Das mathematische Problem lautet dann:
∂TE
∂ 2 TE
= a2E
∂t
∂x2
in E und
∂TW
∂ 2 TW
= a2W
∂t
∂x2
in W.
(1.125)
An der Phasengrenze haben wir
ẋI =
κW ∂TW
κE ∂TE
(t, xI (t)) −
(t, xI (t)),
ρλ ∂x
ρλ ∂x
(1.126)
sowie die Schmelzbedingung
TE (t, xI (t)) = TW (t, xI (t)) = TS .
27
(1.127)
Die Anfangs- und Randdaten sind
xI (0) = 0 und TE (t, 0) = T0 , TW (t, ∞) = TA .
(1.128)
Die Differentialgleichungen (1.125) sind linear, und deshalb gibt es viele mögliche Integrationsmethoden. Die Auswahl einer speziellen Methode
hängt aber entscheidend von der Art der Anfangs- und Randdaten ab. Auf
Anhieb die adequate Methode zu finden erfordert Erfahrung, die nur durch
viel Übung gewonnen werden kann. Ein Paket von Regeln, die grundsätzlich
zum Ziel führen, gibt es auf dem Gebiet der partiellen Differentialgleichungen nicht.
Wir werden im Folgenden das Problem auf der Grundlage einer Ähnlichkeitslösung behandeln. In dieser Klasse von Lösungen wird eine partielle
Differentialgleichung in eine gewöhnliche Differentialgleichung überführt.
Bei linearen Gleichungen geht dies meistens, aber häufig sind mit Ähnlichkeitslösungen die Anfangs- und Randdaten nicht erfüllbar. Dies wird hier
aber nicht passieren.
Die Ähnlichkeitslösung der Wärmeleitungsgleichung startet mit dem Ansatz
x
T (t, x) = T̂ (z) mit z = √ .
(1.129)
t
Eine Differentialgleichung vom Typ (1.125) reduziert sich hiermit auf
T̂ 00 +
z 0
T̂ = 0,
2a2
(1.130)
was wir mit der Substitution f (z) = T̂ 0 (z) auf eine Gleichung 1. Ordnung
zurückführen können, nämlich
f0 +
z
f = 0,
2a2
woraus folgt f = B̃ exp(−
z2
),
4a2
(1.131)
sowie nach nochmaliger Integration
Zz
T̂ = A + B̃
exp(−
y2
)dy.
4a2
(1.132)
0
Das in (1.132) verbleibende Integral stellt die gut untersuchte Fehlerfunktion dar. Diese ist definiert durch
2
erf(x) = √
π
Zx
exp(−
y2
)dy
2
mit erf(0) = 0,
0
28
erf(∞) = 1.
(1.133)
Wir haben somit eine Lösung von (1.125) mit zwei Integrationskonstanten
A und B gefunden:
T (t, x) = A + B erf(
x
√ ).
2a t
(1.134)
Diese Lösung verwenden wir nun im Eis als auch im Wasser und haben
dann
x
x
√ ) und TW (t, x) = AW + BW erf(
√ ).
TE (t, x) = AE + BE erf(
2aE t
2aW t
(1.135)
Aus den Anfangs- und Randaten (1.128) sowie aus der Schmelzbedingung
(1.127) folgen vier Gleichungen. Für die Größen AE , BE erhalten wir
T0 = AE ,
TS = AE + BE erf(
zI
),
2aE
(1.136)
und für AW , BW folgt
T A = A W + BW ,
TS = AW + BW erf(
zI
).
2aW
(1.137)
Nach Auflösung erhalten wir
TS − T0
BE =
,
erf( 2azIE )
TS − TA erf( 2azIW )
TA − TS
.
1−
erf( 2azIW )
(1.138)
Auf den ersten Blick sieht es so aus, als ob wir mit unserem Ähnlichkeitsansatz√gescheitert wären, denn die Integrationskonstanten hängen von
zI = xI (t)/ t ab. Wir erhalten also nur dann Konstanten,
wenn die Größe
√
zI konstant ist, d.h., die Funktion xI (t) geht wie t.
AE = T0 ,
AW =
erf( 2azIW )
,
BW =
In der Tat ist dies aber der Fall, denn aus der Bestimmungsgleichung
(1.126) für die Bewegung der Phasengrenze folgt nach Einsetzen der beiden
Lösungen eine zeitunabhängige transzendente Gleichung für zI :
1
κE BE (zI )
z2
κW BW (zI )
z2
1
zI = √ (
exp(− I2 ) −
exp(− I2 )).
2
aE
4aE
aW
4aW
ρλ π
(1.139)
Diese Gleichung wird numerisch gelöst, und zwar für den Datensatz: ρ =
103 kg/m3 , λ = 333, 4 Nm/kg, κE = 2, 38 Nm/(m2 s), κW = 0, 55 Nm/(m2 s),
cE = 2, 09 103 Nm/(K kg), cW = 4, 22 103 Nm/(K kg).
Die Daten des Anfangs- Randwertproblems sind: TA = 2◦ C, T0 = −4◦ C,
TS = 0◦ C.
29
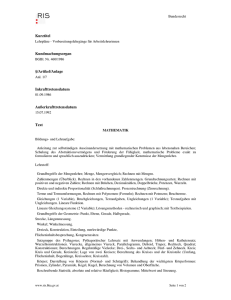
Abbildung 1.4: Links: Graphische Lösung einer transzendenten Gleichung.
Rechts: Evolution der Temperatur während des Wachstums einer Eisschicht.
Die Abbildungen 1.4 zeigen die graphische Lösung der transzendenten Gleichung, sowie für verschiedene Zeiten den Temperaturverlauf im Eis und im
Wasser. An der Stelle des Knicks befindet sich die Phasengrenze.
Temperaturschwankungen im Erdreich. Die Tiefe eines Weinkellers
im Erdreich wird so festgelegt, dass dort die Temperaturschwankung höchstens ∆ = 1◦ C beträgt. Wir gehen von einer homogenen Erdschicht aus,
und berücksichtigen nur Schwankungen aufgrund von täglichen und jährlichen Temperaturschwankungen an der Erdoberfläche um einen Mittelwert
Tm , welcher in Deutschland 9◦ C beträgt. Die Schwankungen stellen wir
jeweils mit einer Sinusfunktion dar.
Übung 1.13 a.) Zeige, dass der Ähnlichkeitsansatz, der beim
Problem einer wachsender Eisschicht erfolgreich
war, hier versagt.
b.) Löse die Wärmeleitungsgleichung mittels ebener Wellen der Form
T (t, x) = a + b exp(i(ωt − kx)),
(1.140)
und bestimme die Funktion k(ω).
c.) Erläutere die Eigenschaften der Lösung. Berechne die notwendige Kellertiefe für die tägliche
als auch für die jährliche Schwankung. Wähle hierzu Temperaturamplituden an der Erdoberfläche
sowie Materialkonstanten für den Stoff Erde.
30
Evolution von Thermospannungen. Eine Kugel aus Glas mit Radius
R0 = 0.01 m und Temperatur TA = 20◦ C wird in Wasser der Temperatur TW = 100◦ C gelegt. Durch den anfänglichen Temperaturunterschied
entsteht in der Kugel ein zeitabhängiges und inhomogenes Temperaturfeld
sowie hieraus resultierende Thermospannungen. Beides wollen wir berechnen.
Die Grundlage hierfür sind die Bilanzgleichungen des Impulses und der inneren Energie. Diese werden wir in LAGRANGE Koordinaten angeben und
die Näherungen der linearen Elastizitätstheorie verwenden, d.h. alle Terme
werden im Verschiebungsgradienten und in der Temperatur linearisiert:
ρ0
∂ 2 Ui ∂σik
−
= 0,
∂t2
∂Xk
ρ0
∂u ∂Qk
∂eij
+
= σij
.
∂t
∂Xk
∂t
(1.141)
Als Materialgleichungen für die Glaskugel verwenden wir das isotrope HOOKE Elastizitätsgesetz:
σij = (−pR + λekk )δij + 2µeij − (3λ + 2µ)α(T − TR )δij ,
(1.142)
mit der Verzerrung
1 ∂Ui
∂Uj
eij = (
+
).
(1.143)
2 ∂Xj ∂Xi
Die kalorische Zustandsgleichung für die spezifische innere Energie aus dem
letzten Abschnitt, u = c(T − TR ), erhält jetzt einen weiteren Term. Dessen Herleitung basiert auf der thermodynamisch gewonnenen Beziehung
(1.93)2 . In der Approximation der linearen Elastizitätstheorie lautet diese
Beziehung
∂u
1
∂σij
= (σij − T
).
(1.144)
∂eij
ρ0
∂T
Setzen wir hier das HOOKE’sche Gesetz ein, folgt
ρ0
∂u
= (−pR + (3λ + 2µ)αTR )δij + λekk δij + 2µeij .
∂eij
(1.145)
Die Integration liefert
1
ρ0 u = (−pR + (3λ + 2µ)αTR )ekk + λe2kk + µeij eij ) + c(T − TR ). (1.146)
2
Der Wärmefluß soll wieder durch das FOURIER Gesetz gegeben sein:
Qi = −κ
31
∂T
.
∂Xi
(1.147)
Wir berechnen jetzt die Divergenz der Spannung. Es folgt
∂σik
∂
∂T
= (λ + µ)
div(U ) + µ∆Ui − (3λ + 2µ)α
.
∂Xk
∂Xi
∂Xi
(1.148)
Dies setzen wir in die Impulsbilanz (1.141)1 ein. Ferner setzen wir das
Materialgesetz (1.146) für die innere Energie und das FOURIER Gesetz
(1.147) in die Bilanz (1.141)2 ein. In der linearen Approximation folgt dann
zur Bestimmung der unbekannten Funktionen U (t, X) und T (t, X) ein
gekoppeltes System von partiellen Differentialgleichungen:
µ
3λ + 2µ ∂T
∂ 2 Ui
λ+µ ∂
=
div(U
)
+
∆U
−
α
,
i
∂t2
ρ0 ∂Xi
ρ0
ρ0
∂Xi
κ
3λ + 2µ
∂T
∂
=
∆T −
αTR div(U ).
∂t
ρ0 c
ρ0
∂t
(1.149)
(1.150)
Bevor wir dieses System durch Anfangs- und Randdaten komplettieren,
nutzen wir die Radialsymmetrie des Problems aus und vereinfachen danach
das gekoppelte Problem (1.149) und (1.150).
Zunächst führen wir Kugelkoordinaten ein. Hierzu nehmen wir an
U = (U (t, R), 0, 0) und T = T (t, R).
(1.151)
Mit den im Teil I erworbenen Techniken können wir die beiden Differentialgleichungen auf Kugelkoordinaten umschreiben. Mit den Abkürzungen
c21 =
λ + 2µ
,
ρ0
c22 =
3λ + 2µ
,
ρ0
a2 =
κ
ρ0 c
(1.152)
folgt
∂ 2U
∂t2
∂T
∂t
∂ 1 ∂R2 U
∂T
( 2
) − c22 α
,
∂R R ∂R
∂R
1 ∂
∂T
c2 αTR ∂ 1 ∂R2 U
= a2 2
(R2
)− 2
(
).
R ∂R
∂R
c ∂t R2 ∂R
= c21
(1.153)
(1.154)
Die Konstante a2 ist uns schon begegnet und wird thermische Leitfähigkeit
genannt. Sie beschreibt die diffusive Ausbreitung der Wärme. Elastische
Energie breitet sich anders aus. Im Inneren eines Festkörpers können zwei
Typen elastischer Wellen auftreten. Es gibt longitudinale Wellen, die in
Ausbreitungsrichtung schwingen, während die transversalen Wellen ihre
Schwingungsebene senkrecht zur Ausbreitungsrichtung haben. Die longitudinale Welle breitet sich in einem Festkörper mit der Geschwindigkeit c2
32
aus, die transversale Welle mit c1 . In isotropen wie auch in nichtisotropen
Festkörpern gilt immer c2 > c1 .
Auf die Ausbreitung von Wellen kommen wir erst in einem späteren Abschnit noch einmal zurück. Wellen spielen nämlich in der vorliegenden
Anwendung keine Rolle, weil in den Differentialgleichungen (1.153) und
(1.154) Terme mit sehr unterschiedlicher Größenordnung auftreten.
Um dies zu erkennen müssen wir die Gleichungen zunächst dimensionslos
machen. Hierzu führen wir ein:
t = t0 τ, R = R0 ξ, U (t, R) = R0 u(τ, ξ), T (t, R) = TR ϑ(τ, ξ).
(1.155)
In den dimensionslosen Größen lauten die Differentialgleichungen
¶
µ
∂ 2u
c21 t20 ∂ 1 ∂ξ 2 u
c22 αTR ∂ϑ
=
(
)−
,
(1.156)
∂τ 2
R02 ∂ξ ξ 2 ∂ξ
c21 ∂ξ
∂ϑ
a2 t0 1 ∂ 2 ∂ϑ
c22 α ∂ 1 ∂ξ 2 u
=
(ξ
)−
(
).
(1.157)
∂τ
R02 ξ 2 ∂ξ
∂ξ
c ∂τ ξ 2 ∂ξ
Nun muss eine Entscheidung getroffen werden, auf welcher Zeitskala t0 die
Vorgänge in der Glaskugel zu beschreiben sind. Da wir uns für die Beschreibung des Vordringens von Temperaturstörungen interessieren, setzen
wir a2 t0 /R02 = 1 und berechnen hieraus t0 .
Als Materialdaten für Glas verwenden wir: ρ = 2480kg/m3 , λ = 2.5 1010 N/m2 ,
µ = 3.0 1010 N/m2 , α = 9.0 10−6 1/K, c = 840J/kg/K und κ = 0.76W/K/m.
Es folgt
c21 t20
c22 αTR
c22 α
16
−3
=
2.6
10
,
m
=
=
4.2
10
,
m
=
= 0.58.
2
3
R02
c21
c
(1.158)
Mit diesen Zahlen lautet unser System
µ
¶
∂ 2u
∂ 1 ∂ξ 2 u
∂ϑ
= m1
(
) − m2
,
(1.159)
∂τ 2
∂ξ ξ 2 ∂ξ
∂ξ
1 ∂
∂ϑ
∂ 1 ∂ξ 2 u
∂ϑ
= 2 (ξ 2 ) − m3 ( 2
).
(1.160)
∂τ
ξ ∂ξ
∂ξ
∂τ ξ ∂ξ
t0 = 293s, m1 =
Wir schließen, dass der Faktor m1 auf der Zeitskala der Ausbreitung von
Wärme ungeheuer groß ist. Darum macht die Approximation m1 → ∞
Sinn, nur müssen wir dann garantieren, dass
· µ
¶¸
∂ϑ
∂ 1 ∂ξ 2 u
∂ 2u
( 2
) − m2
(1.161)
lim m1
= 2
m1 →∞
∂ξ ξ ∂ξ
∂ξ
∂τ
33
endlich bleibt. Im Zusammenhang mit der Ausbreitung einer Temperaturstörung erwarten wir nämlich nur endlich große Beschleunigungen.
Deshalb muß in (1.161) der Faktor von m1 bei diesem Limes gegen Null
gehen. Anstelle der Differentialgleichung (1.159) haben wir somit
∂ 1 ∂ξ 2 u
∂ϑ
1 ∂ξ 2 u
( 2
) − m2
=0 ⇒ 2
= m2 ϑ + C.
∂ξ ξ ∂ξ
∂ξ
ξ ∂ξ
(1.162)
Durch diese Vorgehensweise ist aber auch die Temperaturgleichung (1.161)
von der Verschiebung entkoppelt, denn Einsetzen von (1.162)2 in (1.161)
liefert
∂ϑ
1 ∂
∂ϑ
(1 + m2 m3 )
= 2 (ξ 2 ).
(1.163)
∂τ
ξ ∂ξ
∂ξ
Wenn wir nun noch den konstanten Faktor m2 m3 ≈ 10−3 gegen 1 vernachlässigen lautet unser stark reduziertes Problem
1 ∂ξ 2 u
= m2 ϑ + C.
ξ 2 ∂ξ
1 ∂
∂ϑ
∂ϑ
= 2 (ξ 2 ),
∂τ
ξ ∂ξ
∂ξ
(1.164)
Wir können als zunächst über (1.164)1 das Temperaturproblem lösen, und
anschließend bestimmen wir die Verschiebung aus (1.164)2 .
Für das reduzierte System geben wir jetzt Anfangs- und Randdaten vor.
Zunächst für die Temperatur. Mit TR = T0 haben wir
ϑ(0, ξ) = 1 für 0 ≤ ξ ≤ 1.
(1.165)
Im Zentrum der Glaskugel und auf ihren Rand wählen wir
lim ξ 2
ξ→0
∂ϑ
(τ, ξ) = 0,
∂ξ
ϑ(τ, 1) = ϑW
(1.166)
Der Ausdruck unter dem Limes ist proportional zur Wärme, die durch eine
Kugel vom Radius ξ fließt. Wir erwarten, dass diese gegen Null geht, wenn
wir die Kugel auf Null zusammenziehen.
Die Randbedingung (1.166)2 ist allerdings nicht sehr realistisch. Die Verhältnisse werden besser durch die Annahme eines Temperatursprunges am
Rand beschrieben, welcher proportional zum dortigen Wärmefluß ist:
K(ϑ(τ, 1) − ϑW ) = −
κ ∂ϑ
(τ, 1)
R0 ∂ξ
(1.167)
Die Materialkonstante K heißt Wärmeübergangskoeffizient. Die Randbedingung (1.167) behandeln wir aber erst in einer späteren Übung.
34
Da in dem betrachteten Grenzfall keine elastische Wellen mehr auftreten,
dürfen wir für die Verschiebung keine Anfangsdaten vorgeben. Mit (1.164)2
liegt für u(τ, ξ) ein reines Randwertproblem vor. Die Zeitabhängigkeit in
der Funktion u(τ, ξ) kommt über die Zeitabhängigkeit der Temperatur herein. Die Randdaten sind
u(τ, 0) = 0 und σ < rr > (τ, 1) = −p0 .
(1.168)
Erinnere an Teil I dieser Vorlesung, wonach T < ij > die physikalischen
Komponenten eines Tensors 2. Stufe bezeichnen.
Als nächstes bestimmen wir den Temperaturverlauf in der Glaskugel mittels der Gleichung (1.164)1 und der Daten (1.165) sowie (1.166). Hierzu
setzen wir
ϑ̃(τ, ξ) = ϑ(τ, ξ) − ϑW ⇒ ϑ̃(τ, 1) = 0.
(1.169)
Außerdem definieren wir
ϑ̃ =
∂ 2 ϑ 2 ∂ϑ
1 ∂ 2Θ
Θ
⇒
+
=
,
ξ
∂ξ 2
ξ ∂ξ
ξ ∂ξ 2
(1.170)
und damit reduziert sich die Gleichung (1.164)1 auf
∂Θ
∂ 2Θ
=
.
∂τ
∂ξ 2
(1.171)
Diese Struktur und die homogene Randbedingung Θ(τ, 1) = 0 erlauben
eine Lösung mit dem Produktansatz
ϕ̇
χ00
Θ(τ, ξ) = ϕ(τ )χ(ξ) ⇒
=
= −λ2 .
ϕ
χ
(1.172)
Die neu eingeführte Größe −λ2 muss eine negative Konstante sein. Sie ist
konstant, weil die linke Seite von (1.172)2 nur von τ und die rechte Seite nur
von ξ abhängt, und beide Größen können unabhängig voneinander gewählt
werden. Das gewählte Vorzeichen garantiert, dass die Randbedingungen
erfüllbar sind.
Die beiden Gleichungen
ϕ̇ + λ2 ϕ = 0 und χ00 + λ2 χ = 0
(1.173)
haben die Lösungen
ϕ(τ ) = exp(−λ2 τ ) und χ(ξ) = A sin(λξ) + B cos(λξ).
35
(1.174)
Die Randbedingung Θ(τ, 1) = 0 erzwingt χ(1) = 0. Dies wird erreicht
durch B = 0 und λ = nπ mit n ∈ {1, 2, 3...}. Aber auch die Randbedingung
(1.166)1 bei ξ = 0 ist hiermit erfüllt, was wir nach Umschreiben von ϑ auf
Θ sofort sehen.
Bei einer linearen Differentialgleichung ist die Summe von Lösungen wieder
eine Lösung. Wir schreiben deshalb als Lösungsansatz
Θ(τ, ξ) =
∞
X
An exp(−n2 π 2 τ ) sin(nπξ),
(1.175)
n=0
und hoffen, dass die Summe nach Bestimmung der Konstanten An auch
konvergiert.
Die Anfangsbedingung ϑ(0, ξ) = 1 lautet in der neuen Variablen: Θ(0, ξ) =
(1 − ϑW )ξ. Es muss also gelten
(1 − ϑW )ξ =
∞
X
An sin(nπξ) für ξ ∈ [0, 1].
(1.176)
n=1
Das Problem der Approximation willkürlicher Funktionen durch trigonometrische Reihen ist Gegenstand der FOURIER Analysis. Auf die allgemeinen Voraussetzungen, dass so etwas überhaupt geht, gehen wir hier
nicht ein. Stattdessen behandeln wir unser spezielles Problem explizit: Wir
versuchen die Approximation einer linearen Funktion durch eine trigonometrische Reihe.
Das Ziel ist die Bestimmung der Konstanten An , so dass die rechte Seite
der Gleichung (1.176) konvergiert und gleich der linken Seite ist. Aufgrund
unseres Wärmeleitungsproblems lebt ξ nur auf dem Intervall [0, 1]. Für eine
Approximation mittels (1.176) müssen wir aber die lineare Funktion für das
Gebiet [-1,1] definieren, und dies tun wir durch ungerade Fortsetzung. Den
Grund hierfür und das weitere Umfeld der Problematik behandeln wir in
der nächsten Übung.
Wir multiplizieren jetzt (1.176) mit sin(mπξ) und integrieren über das
Intervall [0, 1]:
Z1
(1 − ϑW )
ξ sin(mπξ)dξ =
0
∞
X
Z1
sin(nπξ) sin(mπξ)dξ.
An
n=1
(1.177)
0
Das linke Integral liefert (−1)m+1 /(πm) und Rechts erhalten wir 1/2 δnm .
Es folgt
1
2
(1.178)
An = (1 − ϑW )(−1)n+1 .
π
n
36
Mit (1.176) und ϑ = ϑW + Θ/ξ erhalten wir somit als Lösung des Wärmeleitungsproblems
ϑ(τ, ξ) = ϑW + (ϑW − 1)
∞
2 X (−1)n
sin(nπξ)
exp(−n2 π 2 τ )
.
π n=1 n
ξ
(1.179)
Abbildung 1.5: Evolution des Temperaturfeldes in einer Glaskugel.
Es verbleibt die Berechnung der Verschiebung u(τ, ξ) mittels (1.164)2 . Nach
Einsetzen von (1.179) folgt eine Differentialgleichung für u, nämlich
Ã
!
∞
1 ∂ξ 2 u
2 X (−1)n
sin(nπξ)
= m2 ϑW + (ϑW − 1)
exp(−n2 π 2 τ )
+ C.
ξ 2 ∂ξ
π n=1 n
ξ
(1.180)
Integration liefert mit einer weiteren Integrationskonstanten B:
u = Aξ + (ϑW − 1)
∞
2 X (−1)n
B
exp(−n2 π 2 τ )Un (ξ) + 2 .
π n=1 n
ξ
(1.181)
Hier haben wir als Abkürzung
Un (ξ) = −
nπ
1 sin(nπξ) − nπξ cos(nπξ)
ξ+ 2 2
3
nπ
ξ2
(1.182)
eingeführt.
Die Größen A und B bestimmen wir jetzt über die Randbedingungen
(1.168). Es gilt
lim Un (ξ) = 0,
(1.183)
ξ→0
37
und wegen u(τ, 0) = 0 folgt somit B = 0.
Die Größe A folgt aus der Bedingung (1.168)2 am Außenrand der Glaskugel.
Hierzu benötigen wir die physikalische Komponente σ < rr > der Spannung, welche sich gemäß (1.142) über die physikalischen Komponneten der
Verzerrung berechnen läßt. In Kugelkoordinaten und bei Radialsymmetrie
gilt
e < rr >=
∂u
,
∂ξ
e < θθ >= e < φφ >=
u
.
ξ
(1.184)
Damit erhalten wir
σ < rr >= −pR + λ(
∂u
u
+ 2 ) + µu0 − (3λ + 2µ) ∗ αTR (ϑ − 1). (1.185)
∂ξ
ξ
Von Interesse sind auch die Tangentialspannungen
u
∂u
σ < θθ >= σ < φφ >= −pR + λ(u0 + 2 ) + µ
− (3λ + 2µ) ∗ αTR (ϑ − 1).
ξ
∂ξ
(1.186)
Wir setzen jetzt σ < rr > (τ, 1) in die Randbedingung σ < rr > (τ, 1) =
−pR ein und erhalten
λ + 2µ ∂u
2λ
( (τ, 1)−A)−
(u(τ, 1)−A).
3λ + 2µ ∂ξ
3λ + 2µ
(1.187)
Das Problem der Thermospannungen in der Glaskugel ist damit vollständig
gelöst.
A = (3λ+2µ)∗αTR (ϑW −1)−
Abbildung 1.6: Evolution Von Thermospannungen in einer Glaskugel.
38
Übung 1.14 Beurteile durch numerische Untersuchungen die
Güte der Approximation der linearen Funktion ξ
über eine FOURIER Reihe mit endlich vielen Termen. Betrachte hierzu die Funktion y = ξ für
ξ ∈ [0, 1]. Stelle diese Funktion durch eine FOURIER Reihe dar. 1. bei ungerader Fortsetzung, 2.
bei gerader Fortsetzung auf das Intervall [−1, 1].
Für größere Intervalle wird periodisch fortgesetzt.
a.) Diskutiere graphisch auf dem Intervall [-2,2] die
Güte der Approximation durch Mitnahme unterschiedlich vieler Terme in der FOURIER Reihe.
b.) Warum kann bei unserem Wärmeleitungsproblem nicht mit gerader Fortsetzung gearbeitet werden?
c.) Finde heraus, was unter dem GIBBS Phänomen verstanden wird und erläutere es an Hand der
Resultate aus Aufgabe a.).
Übung 1.15 a.) Berechne den Temperaturverlauf in der Glaskugel bei Verwendung der Randbedingung (1.167).
Verwende als Wärmeübergangskoeffizient K =
350 W/(K m2 ).
b.) Stelle die Lösung wie in Abbildung ??? dar und
erläutere die Unterschiede.
Übung 1.16 Bei der Herleitung der Wärmeleitungsgleichung
(1.163) haben wir stillschweigend vorausgesetzt,
dass die Größe C nicht von der Zeit abhängt.
Durch Auswertung der Formel für A, welche linear
mit C zusammenhängt, sehen wir aber, dass C als
Folge der Spannungsrandbedingung zeitabhängig
ist. Diskutiere den gemachten Fehler.
39
Die Drucksprung-Radius Charakteristik eines runden mit Luft
gefüllten Gummiballons. In dieser Anwendung betrachten wir mechanische Prozesse bei konstanter Temperatur.
Die Variablen sind darum nur die drei rechtwinklig kartesischen Komponenten der Bewegung xi = χi (t, X)i∈{1,2,3} . Ferner beschränken wir uns auf
quasi-statische Prozesse. Hier basiert die Bestimmung der Bewegung auf
den drei Gleichungen
∂σij
= 0.
(1.188)
∂xj
Als Beispiel einer nichtlinearen Materialgleichung für die Spannung betrachten wir natürliches Gummi (Kautschuk), welches sich durch einen
sehr niedrigen Vulkanisationsgrad auszeichnet. Einfache Experimente mit
natürlichem Gummi belegen bei Verzerrungen unter 300% drei wichtige
Eigenschaften:
1. Natürliches Gummi ist ein inkompressibler Festkörper, d.h. seine Dichte
bleibt bei Deformationen konstant. Folglich gilt ρ = ρ0 , also
det(Fij ) = 1.
(1.189)
2. Natürliches Gummi ist ein isotropes elastisches Material, dessen SpannungsVerzerrungs-Relation idealisiert durch das MOONEY-RIVLIN Gesetz beschrieben werden kann:
−1
σij = −P δij + s1 Bij + s−1 Bij .
(1.190)
3. In guter Näherung gilt
s1 = aT
mit s1 (300K) ≈ 3 ∗ 105 N/m2 ,
s−1 = −0.1s1 .
(1.191)
Das Verzerrungsmaß im Materialgesetz ist der linke CAUCHY-GREEN
Tensor. Dieser hängt wie folgt mit der Bewegung zusammen:
Bij = Fik Fjk
wobei Fij =
∂χi
.
∂Xj
(1.192)
Nach Einsetzen der Materialgleichung in die quasi-statische Impulsbilanz
(1.188) erhalten wir drei Differentialgleichungen 2. Ordnung für die drei
Komponenten von χ. Dazu tritt aber als weitere Differentialgleichung 1.Ordnung die Inkompressibilitätsbedingung (1.189). Wir haben somit vier Gleichungen für nur drei Bewegungen. Aus diesem Grund betrachten wir auch
40
den Druck P als unbekannte Funktion des Ortes, um die gleiche Zahl von
Unbekannten wie Gleichungen zu haben.
Wir bestimmen jetzt die vier Funktionen xi = χi (t, X)i∈{1,2,3} und P (t, X)
für einen runden Gummiballon mit zunächst endlicher Dicke. Beim Aufblasen soll die radiale Symmetrie beibehalten werden. Wir verwenden Kugelkoordinaten mit R, Θ, Φ in der Bezugskonfiguration und r, ϑ, ϕ in der
aktuellen Konfiguration. Die Metriken in den beiden Konfigurationen sind
1 0
0
1 0
0
und gij = 0 r2
.
0
0
Gij = 0 R2
2
2
0 0 R sin(Θ)
0 0 r sin(ϑ)
(1.193)
Aufgrund der Symmetrieannahme gilt
r = r(R),
ϑ = Θ,
ϕ = Φ,
(1.194)
woraus eine einfache Darstellung des Deformationsgradienten folgt:
∂r
∂r
0 0
0 0
√
∂R
∂R
√
F ij = 0 1 0 bzw. F < ij >= gii Gjj F ij = 0 Rr 0 .
0 0 1
0 0 Rr
(1.195)
Als nächstes werten wir die Inkompressibilitätsbedingung (1.189) aus.
∂r r2
1 = det(F < ij >) =
∂R R2
⇒
r3 = R3 + C.
(1.196)
Bis auf die Integrationskonstante C haben wir damit die Bewegungsfunktion bereits bestimmt. Folgende Schreibweise wird sich als sehr nützlich
erweisen:
C
r = λ(R)R mit λ = (1 + 3 )1/3 .
(1.197)
R
Es verbleibt die Bestimmung der Funktion P (R) aus der quasi-statischen
Impulsbilanz. Bei radialer Symmetrie lautet deren r Komponente
∂σ < rr > 2
+ (σ < rr > −σ < ϑϑ >) = 0.
∂r
r
(1.198)
Zur Angabe von σ < rr > und σ < ϑϑ >= σ < ϕϕ > gemäß der
Materialgleichung (1.191) benötigen wir zunächst
1
4
0
0
λ
0
0
4
−1
λ
B < ij >= 0 λ2 0 und B < ij >= 0 λ12 0 .
0 0 λ12
0 0 λ2
(1.199)
41
Luftgefüllter
runder
Gummiballon
mit
endlicher Dicke in
der Bezugskonfiguration.
Hierbei haben wir die Ableitung der Bewegungsfunktion wie folgt berechnet:
∂r
∂λ
=
R + λ,
∂R
∂R
∂λ
1 1
= ( 2 − λ)
∂R
R λ
⇒
∂r
1
= 2.
∂R
λ
(1.200)
Die Spannungen sind also
1
+ s−1 λ4
λ4
1
σ < ϑϑ > = −P + s1 λ2 + s−1 2 = σ < ϕϕ > .
λ
σ < rr > = −P + s1
(1.201)
(1.202)
Einsetzen in die Impulsbilanz liefert
∂P
∂λ−4 2 2 2 −4
∂λ4 2 −2 2 4
= s1 (
− λ + λ ) + s−1 (
− λ + λ ).
∂r
∂r
r
r
∂r
r
r
(1.203)
Hierzu gehören zwei Randbedingungen. Sowohl im Inneren als auch im
Äußeren des Ballons haben wir Luft unter den Drucken pI und pA . Also
gilt
σ < rr > (RI ) = −pI
und σ < rr > (RA ) = −pA .
(1.204)
Zur Integration von (1.203) ersetzen wir zunächst r durch λ. Dies geschieht
mittels r = λ(R)R sowie durch
∂P
∂P ∂λ
1
∂P
=
= (λ − λ4 )
∂r
∂λ ∂r
r
∂λ
mit
∂λ
∂R ∂λ
1
=
= (λ − λ4 ). (1.205)
∂r
∂r ∂R
r
Ferner schreiben wir auch die beiden r-Ableitungen auf der rechten Seite
von (1.203) in λ-Ableitungen um, und erhalten:
∂λ−4
4
= − λ−5 (λ − λ4 ) und
∂r
r
∂λ4
4
= λ3 (λ − λ4 ).
∂r
r
(1.206)
Nach Einsetzen in (1.203) und nach Ausführung der beiden anstehenden
Divisionen folgt
2s1
2s−1
∂P
= 2 (1 − λ−3 ) + 2 (2λ5 − λ2 + λ−1 ).
∂λ
λ
λ
(1.207)
Die Integration liefert
1
P = C1 + s1 ( λ−4 − 2λ−1 ) + s−1 (λ4 − 2λ + λ−2 ).
2
42
(1.208)
Als nächstes berechnen wir die Spannungen:
1
σ < rr > = s1 ( λ−4 + 2λ−1 ) + s−1 (2λ − λ−2 ) − C1 ,
(1.209)
2
1
σ < ϑϑ > = s1 (λ2 − λ−4 + 2λ−1 ) + s−1 (2λ − λ4 ) − C1 , (1.210)
2
σ < φφ > = σ < ϑϑ > .
(1.211)
Erinnere, dass die Funktion λ(R) die Integrationskonstante C enthält. In
den Spannungen tritt nun als weitere Integrationskonstante die Größe C1
auf. Beide Konstanten können über die Randbedingungen (1.204) berechnet werden, was aber auf nichtlineare Gleichungen führt.
In der Drucksprung-Radius-Charakteristik, welche nun zur Berechnung ansteht, treten die Integrationskonstanten glücklicherweise nicht explizit auf.
Wir bilden
pI − pA = σ < rr > (RA ) − σ < rr > (RI )
¶
µ
1 −4
−4
−1
−1
= s1
(λ − λI ) + 2(λA − λI ) +
2 A
¡
¢
−2
s−1 2(λA − λI ) − (λ−2
A − λI ) .
(1.212)
Dieses Resultat gilt für einen Ballon endlicher Dicke ∆R = RA − RI . Wir
interessieren uns aber für einen dünnen Ballon, d.h. wir betrachten den
Grenzfall ∆R/RI ¿ 1.
Aus (1.197)2 folgt bis auf Terme, die höherer als 1. Ordnung in ∆R/RI
sind,
∆R
λA = λI (1 − (1 − λ−3
).
(1.213)
I )
RI
Hieraus bestimmen wir die vier Beiträge zu pI − pA :
−4
λ−4
A − λI = 4
∆R −4
(λ − λ−7
I ),
RI I
−1
λ−1
A − λI =
∆R −1
(λ − λ−4
I ), (1.214)
RI I
∆R −2
∆R −2
−2
(λI − λI ), λ−2
(λI − λ−5
(1.215)
A − λI = 2
I ).
RI
RI
Dies setzen wir in den Drucksprung (1.212) ein, und schreiben für λI =
rI /RI einfach r/R.
λA − λI =
Es folgt die Drucksprung-Radius-Charakteristik des mit Luft gefüllten runden Gummiballons.
pI − pA = 2
R
s−1 r 2
∆R R
s1 ( − ( )7 )(1 −
( ) ).
R
r
r
s1 R
43
(1.216)
Abbildung 1.7: Messung der Drucksprung-Radius-Charakteristik über ein
U-Rohr Manometer.
Der berechnete Zusammenhang (1.216) gibt den an einem dünnen Gummiballon gemessenen Verlauf sehr gut wieder. Bei kleinen Radien gibt es
einen steilen Anstieg. Dies ist der (r/R)7 Term, hervorgerufen durch die
Inkompressibilität des Gummis. Bei mittleren Radien fällt der Druck mit
wachsendem Radius, was in Formel (1.216) durch (r/R)−1 repräsentiert
wird. Dieses Phänomen ist auch bei Seifenblasen oder einem Wassertropfen in Luft bekannnt. Für große Radien schließlich steigt der Druck im
Ballon gemäß (r/R)2 an. Beachte, dass in Formel (1.216) s−1 < 0 gilt.
Für ein System mehrerer kommunizierender Ballons gibt der nichtmonotone Verlauf der Druckkurve Anlaß zu einem komplizierten Stabilitätsverhalten.
Abbildung 1.8: Befüllung eines Systems kommunizierender Ballons mit
Luft.
Die in der Abbildung 1.8 dargestellten vier Zustände eines Systems N kommunizierender Ballons werden erzeugt durch die Zufuhr von Luft bei konstanter Füllrate, die nicht zu groß ist. Solange die Radien klein sind, haben
44
alle Ballons die gleiche Größe und bewegen sich auf das Ende des ersten Bereichs mit ansteigendem Druck zu. Hier passiert Folgendes: Nur ein Ballon
passiert das Maximum und durcheilt sehr schnell den abfallenden Druckbereich, weil dieser nämlich bei Systemen mit mehr als zwei Ballons instabil
ist. Die hierzu benötigte Luftmenge holt sich der transitierende Ballon aus
den N − 1 Ballons, welche in dieser Phase wieder leicht kleiner werden. Es
gibt jetzt also N − 1 kleine Ballons und ein Ballon ist groß . Da aber weiter
dem System Luft zugeführt wird, tritt nach kurzer Zeit die Situation ein,
dass N − 1 Ballons am Maximum ankommen und wieder nur einer den
Übergang zu großen Radien vollzieht. Jetzt haben wir N − 2 kleine und
zwei große Ballons. So geht es weiter, bis alle Ballons groß sind und dann
natürlich wieder alle den gleichen Radius besitzen.
Das Gebiet, wo im Ballonsystem zwei unterschiedliche Radien vorkommen,
erinnert sehr an einen Phasenübergang mit zwei koexistierenden Phasen,
wie er beispielsweise in einem Flüssig-Dampf-Gemisch vorkommt. Der hier
beschriebene Prozeß kann auf Grundlage eines mathematischen Modells
vorgesagt werden, was aber nicht Gegenstand dieser Vorlesung ist.
45
Übung 1.17 Eine quadratische Gummiplatte wird mit den in
der Abbildung eingezeichneten Kräften Fλ und Fµ
belastet. Hierdurch kommt es in der Platte zu
einer als homogen angenommenen Deformation.
a.) Bezeichne die Komponenten F11 und F22 des
Deformationsgradienten gemäß F11 = λ und
F22 = µ. Wie groß ist dann F33 ?
b.) Es sei A die Größe einer Seitenfläche in der
Bezugskonfiguration. Beweise die Zusammenhänge
−1
−1
f1 = σ11 F 11 A und f2 = σ22 F 22 A.
(1.217)
b.) Führe dimensionslose Kräfte Fλ = f1 /(−As−1 )
und Fµ = f2 /(−As−1 ) ein, und berechne die Kräfte
als Funktionen von λ und µ.
c.) Betrachte den Sonderfall gleicher Kräfte und
zeige, dass es im Gleichgewicht zwei Lösungen gibt:
Eine Lösung ist symmetrisch, d.h. λ = µ und die
andere Lösung folgt mit K = −s1 /s−1 aus der
Gleichung
λ4 −
K 3
1
1
K
λ − 4 λ2 − 3 λ − 4 = 0.
µ
µ
µ
µ
(1.218)
Diskutiere beide Lösungen und gibt Motive bzw.
Kriterien an, welche Lösung sich im Experiment
einstellen wird.
46
Kapitel 2
Kontinuumsphysik von Wellen
2.1
Ziele
Das Auftreten von Wellen gehört zu den wichtigsten Phänomenen der Kontinuumsphysik. Grob gesprochen verstehen wir unter einer Welle, die Ausbreitung einer lokalen Störung in einem Körper in dessen bisher ungestörte
Gebiete.
Dieses Phänomen hat viele Aspekte. Wir werden uns hauptsächlich für
Wellen mit begrenzter Ausdehnung interessieren. Diese sind insbesondere
zur Übertragung von Signalen geeignet.
Übrigens, die anfängliche Temperaturstörung des Randes einer in heißes
Wasser gelegten Glaskugel aus dem letzten Kapitel führt auf der Skala der
Beobachtungszeit nicht zur Entwicklung einer Welle.
2.2
Wellen als Lösungen einer einzelnen Bilanzgleichung
Einführung einiger Begriffe. Wellen treten bei sehr unterschiedlichen
Prozessen auf. Einige Beispiele und deren umgangssprachliche Bezeichnungen sind: Wasserwellen, Schallwellen, elastische Wellen, elektromagnetische
Wellen, Schockwellen. Aus mathematischer Sicht sind all diese Erscheinungen Lösungen einer gewissen Klasse von partiellen Differentialgleichungen,
die wir hyperbolisch nennen.
Damit eine gegebene Differentialgleichung zur Klasse der hyperbolischen
Differentialgleichungen gehört, müssen mindestens die höchsten Zeit- und
47
Ortsableitungen in gleicher Ordnung auftreten. Beispielsweise trifft dies zu
bei der isothermen Version der Gleichung (1.149),
∂ 2 Ui
λ+µ ∂
µ
=
div(U ) + ∆Ui ,
2
∂t
ρ0 ∂Xi
ρ0
(2.1)
nicht aber bei der Wärmeleitungsgleichung (1.150), die wir hier ohne thermische Ausdehnung angeben.
∂T
κ
=
∆T.
∂t
ρ0 c
(2.2)
Auf beide Gleichungen kommen wir später noch einmal zurück.
Eine einzelne Erhaltungsgleichung. Zur Illustration der wesentlichen
Eigenschaften von Wellen betrachten wir das Anfangswertproblem für eine
einzelne Differentialgleichung 1. Ordnung in einer Raumdimension. Zusätzlich fordern wir, dass die Differentialgleichung die Form einer Bilanzgleichung ohne Produktion hat. In diesem Fall sprechen wir auch von einer
Erhaltungsgleichung.
Wir suchen eine Funktion u : t ∈ [0, ∞) × x ∈ R → R mit Anfangsdaten
u(0, x) = u0 (x) und
∂u ∂f (u)
+
= 0,
∂t
∂x
in regulären Punkten, sowie
(2.3)
−w[[u]] + [[f (u)]] = 0 in singulären Punkten.
(2.4)
Zunächst machen wir keine weitere Voraussetzungen an die Anfangsdaten
u0 (x) bzw. an die Flußfunktion f (u).
Die Gleichung (2.3) ist linear in den Ableitungen und kann nichtlinear in
der gesuchten Funktion u ein. Wir sprechen von einer quasilinearen Differentialgleichung.
Charakteristiken-Methode. Zur Lösung des Anfangswertproblems stellen wir jetzt die Charakteristiken-Methode vor. Diese löst das Anfangswertproblem nicht sofort in der ganzen (t, x) Ebene, sondern zunächst nur auf
einer Kurve C : x = x̂(t) in dieser Ebene.
Zur Ausstattung von C mit gewissen Eigenschaften, definieren wir zunächst
û(t) = u(t, x̂(t)),
(2.5)
dx̂(t)
= f 0 (û(t)) und x̂(0) = x0 .
dt
(2.6)
und fordern dann
C:
x̂(t) mit
48
Abbildung 2.1: Charakteristik in der (t, x) Ebene mit Anfangspunkt x0 .
Diese Kurve wird Charakteristik genannt. Der Sinn dieser Konstruktion
wir sogleich klar, denn es folgt wegen (2.3)
dû
∂u dx̂ ∂u
∂u
∂u
=
+
=
+ f 0 (u)
= 0.
dt
∂t
dt ∂x
∂t
∂x
(2.7)
Das heißt: Auf einer Charakteristik ist die gesuchte Funktion u(t, x) konstant. Wir können also schreiben
û(t) = û(0) = u(0, x̂(0)) = u0 (x0 ).
(2.8)
Ferner folgt aus (2.6), dass die Charakteristik eine Gerade mit Anfangspunkt in x0 ist, also
x̂(t) = f 0 (u0 (x0 ))t + x0 .
(2.9)
Mit den Formeln (2.8)und (2.9) liegt damit bereits ein Konstruktionsprinzip für die Lösung des Anfangswertproblems vor.
Als nächstes geben wir eine alternative Darstellung der Lösung (2.8) und
(2.9) unseres Anfangswertproblems an.
u(t, x) = u0 (x − f 0 (u(t, x))t).
(2.10)
Durch Bildung von ∂u/∂t und ∂u/∂x sehen wir, dass (2.10) in der Tat die
Differentialgleichung (2.3) erfüllt.
Im linearen Fall, d.h. f = cu ist diese Darstellung auch sehr nützlich, denn
es folgt
u(t, x) = u0 (x − ct).
(2.11)
Wir erkennen hier sofort, dass bei einer positiven Konstanten c die Anfangsfunktion ohne Formänderung mit der Geschwindigkeit c nach rechts
wandert. Für c < 0 wandert die Anfangsfunktion nach links. Dieses Verhalten verbinden wir typischer Weise mit einer ungedämpften Welle.
49
Im nichtlinearen Fall können wir mit (2.9) auch schreiben
u(t, x) = u0 (x − f 0 (u0 )t).
(2.12)
Auch hier ist der Faktor vor t, d.h. f 0 (u0 ) die Geschwindigkeit, mit der sich
die Anfangsfunktion, je nach Vorzeichen von f 0 (u0 ), nach rechts oder nach
links bewegt. Als Komplikation gegenüber dem linearen Fall tritt allerdings
hier hinzu, dass die Geschwindigkeit vom Funktionswert u0 abhängt. Es
gibt jetzt eine Formänderung der Anfangsfunktion. Natürlich gibt es wegen
(2.8) wieder keine Dämpfung.
Übung 2.1 Behandle das soeben beschriebene Problem mit
der linearen Flußfunktion f = cu, wobei c > 0
eine positive Konstante ist.
a.) Untersuche die Lösung für die Anfangsdaten
u0 (x) = exp(−x2 ),
(2.13)
und zeichne die Lösung für die Zeiten t = 0, 1, 2.
b.)
Führe
das
gleiche
Programm
für
die
folgende
Anfangsfunktion
durch.
Übung 2.2 Betrachte die Anfangsfunktion aus Übung 2.1b
und beschreibe deren Evolution mittels der Differentialgleichung
∂u ∂f (u)
+
= −αu,
∂t
∂x
mit α > 0.
(2.14)
a.) Erweitere die Charakteristiken-Methode auf
diesen Fall.
b.) Konstruiere die Lösung für den linearen Fall.
Komplizierter wird es, wenn f 0 (u) nicht konstant ist. In diesen Fällen ist die
Darstellung (2.10) zur expliziten Konstruktion der Lösung nicht nützlich.
50
Trotzdem erkennen wir mittels (2.10) einen interessanten Aspekt, welcher
typisch für hyperbolische Differentialgleichungen ist. Die Ableitungen von
(2.10) lauten nämlich
∂u
−u00 f 0 (u0 )
=
∂t
1 + u00 f 00 (u0 )t
und
∂u
u00
=
.
∂x
1 + u00 f 00 (u0 )t
(2.15)
Falls an einer Stelle x0 das Produkt u00 f 00 (u0 ) < 0 ist, gibt es eine positive
Zeit tC wo beide Ableitungen unendlich werden:
∂u
→ ∞,
∂t
∂u
1
→ ∞ für t → tC = − 0 00
.
∂x
u0 f (u0 )
(2.16)
BURGERS Gleichung. Diesen Sachverhalt werden wir für die Flußfunktion f = 1/2 u2 genauer untersuchen. Es folgt dann f 0 = u und f 00 = 1 > 0
und der resultierende Erhaltungsatz heißt BURGERS Gleichung. Hier lautet die Gleichung einer bei x0 startenden Charakteristik
x̂(t) = u0 (x0 )t + x0 .
(2.17)
Die Abbildung 2.2 zeigt für die Funktion u0 aus Übung 2.1b fünf ausgewählte Charakteristiken. Die bei x1 , x2 , x4 , x5 startenden Charakteristiken
haben die Steigung u0 (xi )i∈{1,2,4,5} = 0, und auf diesen verschiebt sich der
Funktionswert u0 (xi ) = 0 nach rechts. Die bei x0 = x3 startende Charakteristik hat die Steigung u0 (x3 ) = 1 und trifft zur Zeit t = 1 auf die
Charakteristik, die bei x4 gestartet war.
Abbildung 2.2: Entstehung einer Unstetigkeit durch zwei sich schneidende
Charakteristiken.
Somit kommen zur Zeit t = 1 am Ort x4 die beiden Funktionswerte 0 und
1 an. Es ist eine Unstetigkeit entstanden. Deshalb ist für Zeiten t ≥ 1 die
Sprungbilanz (2.4) zuständig. Für f = 1/2 u2 erhalten wir
w=
1
1
[[f (u)]]
= (u+ + u− ) =
[[u]]
2
2
(2.18)
Die vollständige Evolution der Anfangsbedingung läuft wie folgt ab. Bei
Beibehaltung sowohl seiner Höhe als auch der Lage der Fußpunkte kippt das
51
anfängliche Dreieck solange nach rechts, bis zur Zeit t = 1 bei x4 = 1 eine
Unstetigkeit entstanden ist. Hierbei bewegt sich jeder Punkt der Funktion
mit der Geschwindigkeit f 0 (u0 ) = u0 . Am schnellsten ist die Dreiecksspitze,
welche die Geschwindikeit f 0 = 1 hat. Für t > 1 bewegt sich die Unstetigkeit, wir sprechen auch von einer Wellenfront, mit der Geschwindigkeit
w = 1/2 nach Rechts. Die Schleppe der Wellenfront wird mit wachsendem
t immer flacher, denn der linke Fußpunkt bleibt zu allen Zeiten bei x2 = −1
liegen.
Das beobachtete Verhalten ist generisch für eine hyperbolische Erhaltungsgleichung.
Hat ein einzelner Erhaltungssatz
∂u ∂f (u)
+
=0
∂t
∂x
(2.19)
eine Flußfunktion f (u) und Anfangsdaten u0 (x), so dass gilt
∂u0 00
f (u0 ) < 0,
∂x
(2.20)
dann bildet sich selbst bei glatten Anfangsdaten in endlicher Zeit
1
f 00 (u0 )
∂x
tC = − ∂u0
(2.21)
eine Unstetigkeit aus.
An dieser Stelle vermerken wir den wesentlichen Unterschied zwischen einem hyperbolischen Erhaltungssatz und einer parabolischen Differentialgleichung, wie sie beispielsweise durch die Wärmeleitungsgleichung gegeben
ist.
Selbst bei unstetigen Anfangsdaten sind die Lösungen der Wärmeleitungsgleichung für t > 0
κ ∂ 2T
∂T
=
(2.22)
∂t
ρ0 c ∂x2
unendlich oft differenzierbar. Die BURGERS Gleichung als Prototyp einer
hyperbolischen Differentialgleichung hat dagen Lösungen, die höchstens
so glatt wie die Anfangsdaten sind.
Im Sinne der obigen Diskussion hat deshalb die Wärmeleitungsgleichung als
Prototyp einer parabolischen Differentialgleichung keine Lösung von Wellen
mit endlicher Ausdehnung und(!) endlicher Ausbreitungsgeschwindigkeit.
52
Das Mehrdeutigkeitsproblem. Ein weiterer interessanter Aspekt im Zusammenhang mit hyperbolischen Differentialgleichungen ist das Auftreten
von mehreren Lösungen eines gegebenen Anfangswertproblems. Zur Selektion der physikalisch relevanten Lösung wird deshalb ein sogenanntes
Auswahlkriterium benötigt. Zur Illustration betrachten wir ein RIEMANN
Problem für die BURGERS Gleichung.
RIEMANN Probleme sind wichtig, weil sie den Kern vieler numerischer
Verfahren zur Lösung hyperbolischer Erhaltungsgleichungen bilden. RIEMANN Probleme sind charakterisiert durch unstetige Anfangsdaten vom
Typ
½
0 x<0
u0 (x) =
(2.23)
1 x>0
Es gilt natürlich unsere Sprungbilanz (2.18), wonach sich die anfängliche
Unstetigkeit mit der Geschwindigkeit w = 1/ 2 nach rechts bewegt.
Abbildung 2.3: Ausbreitung einer Unstetigkeit.
Zum gleichen Anfangswertproblem gibt aber noch eine weitere Lösung.
Die anfängliche Unstetigkeit hat sich hier in eine stetige Lösung mit zwei
Knicken verwandelt.
Abbildung 2.4: Ausbreitung einer stetigen Lösung zu den gleichen Anfangsdaten wie in Abbildung 2.3.
Das dies auch eine Lösung der BURGERS Gleichung zu den Anfangsdaten
(2.23) ist, sehen wir wie folgt. Zunächst liefern RIEMANN Probleme für
hyperbolische Erhaltungsgleichungen Lösungen mit selbstähnlicher Struktur, d.h. u(λt, λx) = u(t, x). Denn der Ansatz
x
(2.24)
u(t, x) = ũ( )
t
53
erfüllt bei Differenzierbarkeit von ũ die Gleichung (2.3) und die Anfangsdaten. Es gilt nämlich
0=
∂u ∂f (u)
1 x
+
= (− + f 0 (u))ũ0
∂t
∂x
t
t
und u0 (λx) = u0 (x).
(2.25)
Somit können wir aus der algebraischen Gleichung
f 0 (ũ) =
x
t
(2.26)
eine stetige Lösung ermitteln. Im BURGERS Fall, d.h. mit f 0 = u, folgt
u(t, x) = x/t. Dies ist die in Abbildung 2.4 eingezeichnete Gerade, die mit
wachsendem t immer flacher wird.
Wir fragen: Welche der beiden Lösungen ist physikalisch relevant?
Zur Beantwortung schauen wir uns die Charakteristiken in der t, x Ebene
an.
Abbildung 2.5: Links: (t, x) Gebiet ohne Charakteristiken. Rechts: Die Unstetigkeit wird nicht aus Anfangsdaten erzwungen.
Die Abbildung 2.5links zeigt die Charakteristiken des Problems. Wir beobachten, dass es ein Dreieck in der Raum-Zeit-Ebene wo Charakteristiken
nicht existieren. In diesem Gebiet gibt es keine Eindeutigkeit. Beide aufgezeigten Lösungen sind hier möglich.
Kausalität und LAX Kriterium. Aus der Abbildung 2.5rechts beziehen wir die Erkenntnis, dass die unstetige Lösung unphysikalisch ist. Die
Argumentation geht wie folgt. Wir haben gelernt, dass Anfangsdaten auf
Charakteristiken transportiert werden. Treffen sich zwei bei t = 0 startende Charakteristiken, so entsteht am Schnittpunkt eine Unstetigkeit. Diese
wird somit aus Anfangsdaten erzwungen. Im hier vorliegenden Fall lassen
54
sich zwei schneidende Charakteristiken nicht auf die Anfangsdaten zurückführen. Die Daten, welche zu der Unstetigkeit führen, kommen aus der
Zukunft, was wir als unphysikalisch ansehen.
Wir fordern deshalb folgendes
Auswahlkriterium nach LAX: Unstetige Lösungen werden nur akzeptiert, falls diese aus den Anfangsdaten entstehen. Mit anderen Worten:
Die zur Unstetigkeit führenden Charakteristiken müssen auf der t = 0
Achse starten.
Dies wird erzwungen durch die Ungleichung von LAX:
f 0 (u− ) > w > f 0 (u+ ).
(2.27)
Nach der LAX Bedingung muss eine erlaubte Unstetigkeit in der (t, x)
Ebene die Struktur der Abbildung 2.6 haben.
Abbildung 2.6: Unstetigkeit, die kausal mit den Anfangsdaten verbunden
ist.
Eine Unstetigkeit, welche die LAX Bedingung erfüllt, heißt Stoß , bzw.
Stoßwelle.
Einige Bemerkungen zum LAX Kriterium. Durch das LAX Kriterium wird das Mehrdeutigkeitsproblem leider nur gelöst, falls f (u) eine
konvexe Funktion ist, d.h. falls gilt
f (u) ≥ f (υ) + f 0 (υ)(u − υ).
(2.28)
Die Funktion f (u) = u3 ist keine konvexe Funktion, und folglich sind
zur Etablierung der Eindeutigkeit bereits hier weitere Kriterien notwendig. Dies wird aber in dieser Vorlesung nicht weiter besprochen.
55
Übung 2.3 Untersuche die Erhaltungsgleichung für f (u) = u3 ,
und betrachte die Anfangsdaten
½
−3 x < 0
u0 (x) =
1
x>0
(2.29)
Erläutere warum das LAX Kriterium keine eindeutige Lösung generiert.
Zwei Beispiele für die reichhaltige Wellenstruktur von Lösungen
der BURGERS Gleichung. Zur Illustration von Lösungen der BURGERS Gleichung, die nicht mit der Charakteristiken-Methode gewonnen
werden können betrachten wir zwei Anfangswertprobleme. Die hier verwendete Lösungsmethode führt ein Anfangswertproblem für eine einzelne
Erhaltungsgleichung auf ein Extremwertpoblem zurück. Mit den Details
werden wir uns in dieser Vorlesung aber nicht beschäftigen. Die Farben
der beiden folgenden Abbildungen kodieren die Funktionswerte u(t, x) in
der t, x Ebene. Der kleinste Funktionwert hat die Farbe Weiss und der
Maximalwert wird durch die Farbe Schwarz angezeigt.
u0 (x) = sin(πx).
(2.30)
Diese Anfangsdaten sind beliebig oft differenzierbar. Wie wir aber bereits
an anderen Beispielen gesehen haben, kippen die Maxima des Sinus nach
rechts bis Unstetigkeiten entstehen, welche die LAX Bedingung erfüllen.
Übung 2.4 a.) Nach welcher Zeit entsteht die Unstetigkeit?
b.) Warum bewegt sich die Unstetigkeit nicht?
Die Anfangsdaten des zweiten Beispiels sind unstetig.
2
−1
u0 (x) =
1
−1.5
x ≤ −2
−1<x≤0
0<x≤1
x>1
(2.31)
Hier beobachten wir, dass die Lösung anfänglich eine reichhaltige Struktur
hat. Es gibt einen Bereich, wo u(t, x) konstant ist, hieran schließt sich eine
Lösung der Form u(t, x) = ũ(x/t) an, und es tritt eine Unstetigkeit hat.
Für spätere Zeiten gibt es nur noch eine einzelne Unstetigkeit.
56
Abbildung 2.7: Links: Glatte Anfangsdaten führen zu ruhenden Unstetigkeiten. Rechts: Unstetige Anfangsdaten führen nach einer komplexen Periode zu einer einzelnen Unstetigkeit.
Übung 2.5 a.) Zeige, dass die finale Unstetigkeit die LAX Bedingung erfüllt.
b.) Erläutere, dass diese Unstetigkeit nicht über
Charakteristiken auf die Anfangsdaten zurückverfolgt werden kann.
2.3
Wellen als Lösungen eines Systems mehrerer Bilanzgleichungen
Begriffsbildungen. Liegen zwei oder mehr Erhaltungsgleichungen vor,
müssen zur Behandlung einige neue Begriffe eingeführt werden. Wir tun
dies für den allgemeinen Fall eines Systems von N gekoppelten Bilanzgleichungen. Dabei beschränken wir uns wieder auf eine Raumdimension.
Wir suchen N Funktionen u = (uα )α∈{1,2,...,N } : t ∈ [0, ∞) × x ∈ R → RN
mit Anfangsdaten (uα (0, x))α∈{1,2,...,N } = (u0α (x))α∈{1,2,...,N } und
∂uα ∂fα (u)
+
= 0,
∂t
∂x
in regulären Punkten, sowie
(2.32)
−w[[uα ]] + [[fα (u)]] = 0 in singulären Punkten.
(2.33)
57
Die Gleichungen (2.32) sind linear in den Ableitungen und können nichtlinear in den gesuchten Funktionen u1 , u2 , ...uN sein. Wir sprechen von einem
System quasilinearer Differentialgleichungen.
Definition der Hyperbolizität: Hat die Matrix
Aαβ =
∂fα
.
∂uβ
(2.34)
N reelle Eigenwerte (λα )α∈{1,2,...,N } , und gib es entsprechende rechte und
linke Eigenvektoren (Rα )α∈{1,2,...,N } bzw. (Lα )α∈{1,2,...,N } , so dass (2.34)
diagonalisierbar ist, dann heißt das System (2.32) hyperbolisch.
In diesem Zusammenhang erinnern wir an das Eigenwertproblem einer
nicht unbedingt symmetrischen Matrix.
N
X
N
X
(γ)
L(γ)
α Aαβ = λγ Lβ ,
(δ)
Aαβ Rβ = λδ Rα(δ) .
(2.35)
β=1
β=1
Wir können leicht nachrechnen, dass die linken und rechten Eigenvektoren
mit entsprechender Normierung die folgenden Orthogonalitätseigenschaften haben:
N
X
(δ)
L(γ)
α Rα
=δ
γδ
und
α=1
N
X
(γ)
L(γ)
α Rβ = δαβ .
(2.36)
γ=1
Sind alle Eigenwerte verschieden, so ist die Existenz von Eigenvektoren mit
den Eigenschaften (2.36) gesichert. Gibt es mehrere gleiche Eigenwerte, so
hängt es von der Zahl N und dem Rang der Matrix Aαβ ab, ob die Matrix
überhaupt diagonalisierbar ist. Ist Aαβ symmetrisch, ist ihre Diagonalisierbarkeit auch bei Vorliegen gleicher Eigenwerte immer möglich. Außerdem
fallen bei Symmetrie linke und rechten Eigenvektoren zusammen.
Übung 2.6 a.) Spezialisiere die Gleichung (2.1) der linearen
Elastizitätstheorie auf den eindimensionalen Fall,
und schreibe die resultierende Gleichung 2. Ordnung mit geeigneten Variablen in ein System 1.
Ordnung um.
b.) Identifiziere die Matrix Aαβ , und zeige, dass
Hyperbolizität vorliegt.
c.) Berechne die Eigenwerte, sowie die linken und
rechten Eigenvektoren.
58
Die Charakteristiken-Methode im linearen Fall. Wir interessieren
uns für das lineare Anfangswertproblem
N
uα (0, x) =
u0α (x),
∂uα X
∂uβ
+
= 0,
Aαβ
∂t
∂x
β=1
für α ∈ {1, 2, ...N },
(2.37)
mit einer konstanten Matrix Aαβ .
Zur Anwendung der Charakteristiken-Methode multipliziern wir die Gleichungen (2.37) mit den linken Eigenvektoren der Matrix Aαβ und summieren auf. Danach führen wir neue Funktionen ein gemäß
υγ (t, x) =
N
X
L(γ)
α uα (t, x).
(2.38)
α=1
Da die Matrix Aαβ konstant ist, sind auch die linken und rechten Eigenvektoren konstant. Es folgt deshalb
υα (0, x) =
N
X
Rα(β) u0β (x),
β=1
∂υα
∂υα
+ λα
= 0,
∂t
∂x
für α ∈ {1, 2, ...N }.
(2.39)
Das Anfangswertproblem (2.37) ist damit entkoppelt. Für jedes
α ∈ {1, 2, ..., N } liegt eine einzelne Erhaltungsgleichung vor. Die Anwendung der Charakteristiken-Methode aus dem letzten Kapitel liefert sofort
υα (t, x) = υα (0, x0 ) längs der Geraden x̂(t) = λα t + x0
(2.40)
Die Geraden (2.41)2 sind die Charakteristiken des Problems. Im Gegensatz zum Fall mit nur einer Differentialgleichung, wo in x0 nur eine Charakteristik startet, starten hier N Charakteristiken mit den Steigungen
(λα )α∈{1,2,...N } .
Wir können auch schreiben
υα (t, x) = υα (0, x − λα t),
(2.41)
und erhalten mit den Anfangsdaten (2.41)1 , sowie nach Rücktransformation, als explizite Lösung
uα (t, x) =
N
X
γ=1
Rα(γ)
N
X
β=1
59
(γ)
Lβ u0β (x − λγ t).
(2.42)
Übung 2.7 a.) Konstruiere die Lösung des hyperbolischen Systems der linearen Elastizitätstheorie für die Anfangsdaten
U 0 (x) nach Übung 2.1b, und υ 0 (x) = 0.
(2.43)
b.) Zeichne die Lösungen als Funktionen des Ortes
für vier verschiedene Zeiten, die so zu wählen sind,
dass die Struktur der Evolution deutlich wird.
c.) Erläutere ausführlich die auftretenden Wellen
und insbesondere die Unterschiede zum Fall mit
nur einer Gleichung.
Wir beenden den linearen Fall mit ein paar Betrachtungen zu den Charakterisktiken in der t, x -Ebene. Dabei beschränken wir uns auf den Fall
N = 2. Es gibt somit zwei Familien von Charakteristiken
x̂(t) = λ1 t + x0
und x̂(t) = λ2 t + x0 .
(2.44)
Die Mitglieder der beiden Familien sind parametrisiert durch verschiedene Anfangspunkte x0 . Wir nehmen an, dass gilt λ1 < λ2 . Die Lösung
(u1 (t, x), u2 (t, x)) an einem repräsentativen Punkt (t, x) benötigt nach Formel (2.42) auschließlich Daten der Anfangsfunktion an zwei Stellen A =
{x10 , x20 }, was in Abbildung 2.8 illustriert wird. Die Menge A heißt Abhängigkeitsgebiet des Punktes (t, x).
Betrachten wir dagegen einen Punkt x0 und lassen hier die Charakteristiken der beiden Familien starten, dann haben wir damit das Einflußgebiet
von x0 charakterisiert. Das heißt: Die Werte der Anfangsfunktionen in x0
beinflußen zur Zeit t nur Raum-Gebiete, die innerhalb des Dreiecks liegen,
welches durch die beiden Charakteristiken und die Gerade t = konstant
identifiziert ist.
60
Abbildung 2.8: Links: Abhängigkeitsgebiet eines Punktes (t, x). Rechts:
Einflußgebiet eines Anfangspuntes x0 .
61
62
Kapitel 3
Kontinuumsphysik ausgewählter
elektrodynamischer Probleme
3.1
Ziele
Eine große Klasse von Materialien ist nicht nur Träger von Masse, sondern
auch von elektrischer Ladung. Die hierdurch erzeugten Phänomene sind
Gegenstand der Elektrodynamik.
Ältere Anwendungen der Elektrodynamik sind
• Konstruktion von Elektromotoren und die Erzeugung hochfrequenter
Wellen für die Nachrichtenübertragung
• Konstruktion von Halbleiterschaltkreisen
Besonders wichtig in neuerer Zeit sind Anwendungen in den Bereichen
• Herstellung von Solarsilizium. Hier werden sehr heiße Siliziumschmelzen durch wandernde Magnetfelder homogenisiert.
• Herstellung von Brennstoffzellen und von Lithium-Ionen- Batterien.
Dieses Kapitel unternimmt einen kurzen Parforceritt durch die elektrodynamische Theorie. Deren Basis sind die MAXWELLschen Gleichungen, die
analog zu den Bilanzgleichungen für Masse, Impuls und Energie von universell gültiger Natur sind. Aber auch die MAXWELLschen Gleichungen
müssen durch Materialgleichungen ergänzt werden, was wir hier im Kontext
der genannten modernen Anwendungen tun.
63
3.2
Die MAXWELLschen Gleichungen
Grundsätzliches und Historisches. Entdeckt wurden elektrodynamische Kräfte durch Experimente mit kleinen elektrisch geladenen Teilchen.
Deren Ladung induziert zwei unterschiedliche Felder, die sich durch Kraftwirkungen zwischen geladenen Teilchen bemerkbar machen. Die beiden Felder werden durch Funktionen von Zeit und Raum modelliert und heißen
elektrische Feldstärke und magnetische Induktion.
Allerdings wurde zunächst nicht gesehen, dass elektrisch geladene Teilchen
auch ein magnetisches Feld erzeugen. In dieser Periode der elektrodynamischen Theorie gab es zwei getrennte Bereiche mit elektrisch geladenen Teilchen und magnetisch geladener Materie, und die jeweiligen Kräfte zwischen
elektrischen Teilchen bzw. zwischen Magneten wurden getrennt untersucht.
Nach Etablierung des Atoms mit innerer Struktur als Grundbaustein der
makroskopischen Materie, und insbesondere nach Aufstellung der speziellen Relativitätstheorie ist klar, dass magnetisches und elektrisches Feld
eine Einheit im elektromagnetischen Feld bilden. Es gibt keine magnetische
Materie. Es gibt ausschließlich elektrische Ladungen. Die Relativgeschwindigkeit zwischen Beobachter und Ladung entscheidet, ob ein elektromagnetisches Feld als elektrisch oder als magnetisch interpretiert wird oder ob
beide Anteile vorhanden sind.
Die Bestimmung der Kräfte von geladenen Teilchen in elektromagnetischen
Feldern über die sorgfältige Vermessung der resultierenden Bewegungen
führte schließlich zur Aufstellung der elektrodynamischen Theorie.
MAXWELL
schuf die vier
Gleichungen, die
seinen
Namen
tragen,
mittels
aberwitzigster
Motivationen, insbesondere einem
mechanistischen
Äther mit Wirbeln und Rädern.
Überraschender
Weise
konstituieren aber die
MAXWELLschen
Gleichungen die
am besten bestätigte Theorie der
Physik .
Die Grundgleichungen der Elektrodynamik sind die MAXWELLschen Gleichungen. Es wurde schnell erkannt, dass diese Gleichungen, die durch das
Studium von diskreten geladenen Teichen gewonnen wurden, auch die elektromagnetischen Vorgängen in kontinuierlichen Materialien beschreiben.
Dieser Bereich wird im Folgenden im Vordergrund stehen.
Die elektrische Ladung. Das Studium von Experimenten mit gewissen
Materialien hat die Existenz von elektrischer Ladung aufgezeigt. Obwohl
elektrische Ladungen besonders einfache Eigenschaften haben, ergab sich
zur Zeit ihrer Entdeckung noch ein verwirrendes Bild. Hauptsächlich, weil
der Aufbau der Materie aus Atomen noch nicht bekannt war. Heutzutage
ist das Schema der Natur in diesem Kontext aber sehr einfach.
Atome sind als Teilchen elektrisch neutral, sie bestehen aber aus positiv
geladenen Kernen und einer gleich großen aber negativ geladenen Menge
von Elektronen in einer Elektronenhülle um den Kern. Das einzelne Elek64
tron ist Träger der Elementarladung −e0 . Elektronen können weder erzeugt
noch vernichtet werden.
Atome können sich zu Molekülen oder direkt zu makroskopischen Materialien verbinden. Diese Körper sind global gesehen ungeladen, da ihre Bestandteile elektrisch neutral sind. Jedoch können die in den Körpern enthaltenen
positiven und negativen Ladungsbestandteile getrennt werden, so dass lokal
eine der beiden Ladungssorten überwiegt. Auf der makroskopischen Skala
gibt es im wesentlichen drei Methoden der Ladungstrennung:
1. Durch Anwesenheit eines elektromagnetischen Feldes.
2. Durch Zerfall eines Körpers in elektrisch geladene Teilkörper, was
beispielsweise in einer wässrigen Lösung passieren kann.
3. Durch mechanische Reibung. Hierdurch lassen sich nämlich aus manchen Materialien die Elektronen der äußeren Atomhülle sehr einfach
entfernen und werden dabei auf den reibenden Körper übertragen.
Übung 3.1 Konsultiere ein Buch zur experimentellen Bestimmung der elektrischen Ladung.
a.) Erläutere die historischen Meßverfahren zur
Quantifizierung der Ladung eines Körpers. Beachte hierbei, dass die Ladung zunächst über eine
Kraftmessung und später über eine Strommessung
bestimmt wurde.
b.) Erläutere das historische Umfeld der Dimension der elektrischen Ladung. Beschreibe insbesondere den Unterschied zwischen der elektrostatischen und der elektrodynamischen Ladungseinheit, und stelle einen Zusammenhang zu der heutigen Ladungseinheit COULOMB her.
Dies alles fassen wir noch einmal zusammen.
65
Die Eigenschaften der elektrischen Ladung:
1. Ein Körper kann neben seiner Masse eine elektrische Ladung besitzen.
2. Es gibt zwei unterschiedliche Sorten von elektrischer Ladung.
3. Die elektrische Ladung ist charakterisiert durch einen Betrag und
ein Vorzeichen. Wir sprechen deshalb von positiver und negativer
elektrischer Ladung.
4. Der Betrag einer elektrische Ladung ist immer ein ganzzahliges Vielfaches einer Grundladung, die wir Elementarladung nennen. In modernen Einheiten hat die Elementarladung den Wert
e0 = 1.60210−19 COULOMB (C),
(3.1)
wobei ein COULOMB gleich einer AMPERE×Sekunde ist, also 1
C=1 As.
5. Ein ungeladener Körper hat gleiche Mengen an positiver wie negativer Ladung.
6. Die elektrische Ladung eines Körpers ist eine additive Größe.
7. Die Ladung eines abgeschlossenen Körpers ist eine Erhaltungsgröße.
Sie kann weder erzeugt noch vernichtet werden, sondern kann nur
von einem Ort zu einem anderen Ort fließen.
Beschreibung von Körpern mit elektrischer Ladung. Bisher haben
wir in dieser Vorlesung nur 1-Stoff-Systeme behandelt. Körper mit elektrischen Ladungen sind aber grundsätzlich Mehr-Stoff-Systeme. Zur Illustration betrachten wir drei Beispiele.
Ein Kuperdraht besteht aus einem festen Kristallgitter, welches von positiv
geladenen Kupferionen (Cu+ ) gebildet wird. In dieser Umgebung gibt es
die leicht beweglichen (Leitungs-) Elektronen (e− ).
Eine metallische Siliziumschmelze (Si) besteht aus positiv geladenen Siliziumatomen Si+ und Elektronen e− .
Wenn wir Kochsalz (NaCl) in Wasser (H2 O) geben, zerfällt das Salz in seine
geladenen Bestandteile Na+ und Cl− . Der Gesamtkörper besteht also aus
drei Komponenten: Ungeladenes Wasser, positiv geladene Natriumionen
und negativ geladene Clorionen.
66
Wir betrachten deshalb in einem Gebiet Ω ⊂ R3 eine kontinuierliche
Mischung mit N eventuell geladenen Komponenten, die wir durch griechische Buchstaben α, β, ... ∈ {1, 2, ..., N } indizieren. Die kleinsten Teilchen der Komponenten haben Massen mα und Ladungen zα e0 mit zα ∈
{... − 2, −1, 0, 1, 2, 3...}.
Auf der Skala der Kontinuumstheorie werden die Komponenten charakterisiert durch Teilchenzahldichten nα und Geschwindigkeiten υ α . Diese
Grundgrößen sollen Felder sein, d.h. sie sind gegeben durch Funktionen von
Zeit und Raum: nα : t ∈ [0, ∞) × x ∈ Ω → R+ und υ α : t ∈ [0, ∞) × x ∈
Ω → R.
Aus den Grundgrößen bilden wir die Massen- und Ladungsdichten der
Komponenten,
(3.2)
ρα = mα nα und neα = e0 zα nα .
Die entsprechenden Massenstromdichten und elektrische Stromdichten sind
j α = mα nα υ α
und j e α = e0 zα nα υ α .
(3.3)
Massendichte und Ladungsdichte der Mischung werden definiert durch
ρ=
N
X
ρα
e
und n =
α=1
N
X
neα .
(3.4)
α=1
Schließlich definieren wir noch die baryzentrische Geschwindigkeit der Mischung, sowie die Diffusionsgeschwindigkeiten der Komponenten durch
ρυ =
N
X
ρα υ α
und uα = υ α − υ
α=1
⇒
N
X
ρα uα = 0.
(3.5)
α=1
Die Bilanzgleichung der elektrischen Ladung. Zur Bilanzierung der
elektrischen Ladung betrachten wir ein festes Gebiet Ω mit einer glatten
Ladungsdichte ne im Inneren. Der Erhaltungssatz der elektrischen Ladung
besagt dann
Z
I
d
e
n (t, x)dx = − j e · nda.
(3.6)
dt
Ω
∂Ω
Falls das Gebiet Ω durch eine singuläre Fläche I in zwei Teile Ω+ und
Ω− zerlegt wird, und falls es auf I eine elektrische Flächenladungsdichte
neI : t ∈ [0, ∞) × x ∈ I → R+ nebst zugehöriger Flächenstromdichte jIe
67
gibt, dann lautet der Erhaltungssatz der elektrischen Ladung
Z
Z
I
I
d
e
e
e
(
n (t, x)dx+
nI (t, x)da) = −
j ·nda− jIe ·Eda.
dt
Ω+ ∪Ω−
Ω+ ∪Ω−
∂Ω+ \I∪Ω− \I
∂I
(3.7)
Das Linienintegral repräsentiert den Fluß der Flächenladungsdichte tangential zur Fläche I und Normal zum Rand ∂I. Für die Details der geometrischen Verhältnisse konsultiere die Abbildungen I-3.5, I-3.6 und I-2.6.
Zunächst werden wir aber die Möglichkeit von Flächenladungen ignorieren,
und dann lautet die
Lokale Darstellung der Ladungserhaltung:
∂ne
+ div(j e ) = 0 in Ω,
∂t
(3.8)
Auf einer Fläche I ohne Eigenleben mit Normalgeschwindikkeit wν haben
wir
−wν [[ne ]] + [[j e ]] · ν = 0.
(3.9)
Die elektromagnetische Kraft. Ein elektrisch geladenes Teilchen erfährt
eine elektromagnetische Kraft K, welche durch andere Teilchen erzeugt
wird. Das Teilchen selbst ist aber auch Erzeuger einer solchen Kraft.
Zur Trennung der beiden Phänomene wird deshalb zur Vermessung der
Kraft ein Probeteilchen verwendet. Hierunter verstehen wir ein kleines Teilchen mit Masse m und Ladung ze0 , dessen erzeugtes Kraftfeld vernachlässigt werden kann.
Die Vermessung der Kraft geschieht über die Vermessung der Bewegung
x(t) des Probeteilchens in einem elektromagnetischen Feld. Hierzu wird
die NEWTONsche Bewegungsgleichung
m
d 2x
=K
dt2
(3.10)
als gültig vorausgesetzt. Durch experimentelle Auswertung der linken Seite
dieser Gleichung läßt sich dann eine Darstellung der elektromagnetischen
Kraft gewinnen. Es hat sich herausgestellt, dass das Kraftfeld durch zwei
zunächst unterschiedliche Anteile induziert wird. Diese heißen
• E - elektrische Feldstärke
• B - magnetische Induktion
68
Die elektromagnetische Kraft heißt LORENTZ Kraft und hat die Darstellung
dx
K = ze0 (E(t, x) +
× B(t, x)).
(3.11)
dt
Aufgrund der bereits vorhandenen Einheiten von Kraft und Ladung, nämlich NEWTON (N) und COULOMB (C), liegen die Einheiten der elektromagnetischen Felder fest:
[E] =
N
V
=
C
m
und [B] =
N
Vs
= 2,
Cm/s
m
(3.12)
wobei meistens die Einheit VOLT (V) anstelle von Nm/C genommen wird.
Zur Illustration welche Bahnkurven ein geladenes Probeteilche in vorgegebenen elektromagnetischen Feldern macht, betrachten wir zwei Beispiele.
Übung 3.2 Ein Probeteilchen mit Masse m und elektrischer
Ladung e bewegt sich in einem konstanten homogenen Magnetfeld B = (0, 0, B). Zerlege die Geschwindigkeit des Teilchens in Komponenten parallel und senkrecht zu B, d.h. υ = υ || + υ ⊥ .
a.) Zeige, dass gilt
υ || = konstant und |υ ⊥ | = konstant.
(3.13)
b.) Leite eine Beziehung her zwischen dem Krümmungsradius der Bahnkurve und |υ ⊥ |. Diskutiere
die Bewegung.
69
Übung 3.3 Ein Probeteilchen mit Masse m und elektrischer
Ladung e bewegt sich in einem konstanten homogenen elektromagnetischen Feld (E, B).
a.) Betrachte zunächst nur eine Komponente E ||
parallel zu B und gib die Bahnkurve an.
b.) Nimm an E · B = 0. Zeige, dass sich das Problem über den Ansatz
υ = υE + υ1
mit υ E =
E×B
B2
(3.14)
reduzieren läßt auf das Problem
mυ̇ 1 = eυ 1 × B.
(3.15)
c.) Berechne die Bahnkurve und erläutere das Resultat.
Als nächstes übertragen wir die LORENTZ Kraft auf die Ebene der Kontinuumsphysik. Hierzu betrachten wir die oben eingeführte Mischung im
Gebiet Ω und postulieren als Kraftdichte, die auf die Komponente α einwirkt, die
LORENTZ Kraftdichte:
kα = zα e0 nα (t, x)(E(t, x) + υ α (t, x) × B(t, x)).
(3.16)
Die Kombination
E α = E + υα × B
(3.17)
heißt elektromotorische Kraftdichte und wird uns noch häufig begegnen.
In diesem Zusammenhang ist noch folgender Sachverhalt wichtig: Während
die Mischungsgrößen, hier beispielsweise υ α , nur für x ∈ Ω ⊂ R3 definiert
sind, müssen die elektromagnetischen Felder im ganzen Raum definiert
werden, also auch dort, wo es keine Materie gibt, d.h. es gilt E : t ∈
[0, ∞) × x ∈ R3 → R3 und B : t ∈ [0, ∞) × x ∈ R3 → R3 .
Weitere Ziele und Herkunft der elektromagnetischen Gleichungen. Im letzten Abschnitt haben wir das elektrische und das magnetische
Feld über Kraftmessungen an elektrisch geladenen Probeteilchen eingeführt. Das nächste Ziel ist die Aufstellung von Gleichungen zur Berechnung
dieser Felder bei Vorgabe von Ladungs- und Stromverteilungen.
70
Die gesuchten Gleichungen basieren auf nur zwei, aus der Erfahrung gewonnenen, Erhaltungssätzen. Dies sind der Satz von der Erhaltung der
elektrischen Ladung, den wir bereits kennengelernt gelernt haben, und der
Satz von der Erhaltung des magnetischen Flusses.
Die Erhaltung des magnetischen Flusses. Dieses Phänomen folgt aus
einem bemerkenswert einfachen Experiment.
Abbildung 3.1: FARADAYs Experiment: Eine Drahtschleife bewegt sich in
einem magnetischen Feld.
Wird eine geschlossene Drahtschleife in einem gegebenen Magnetfeld B
mit der Geschwindigkeit W bewegt, so entsteht während der Bewegung
im Draht ein elektrisches Feld E, welches einen Strom elektrisch geladener
Ladungsträger (Elektronen) erzeugt. Das in diesem Experiment gefundene
Gesetz heißt
FARADAYsches Induktionsgesetz (Experimentelle Version):
Z
I
d
B · nda = −
(E + W × B) · τ ds.
(3.18)
dt
A(t)
∂A(t)
Überraschender Weise kommt es hier ausschließlich auf die Relativgeschwingkeit zwischen Magnetfeld und Draht an, was aber von FARADAY und
seinen Zeitgenossen in dieser Schärfe nicht sofort erkannt wurde.
Als erstes Beispiel zum Induktionsgesetz betrachten wir die Unipolarmaschine, welche einen wichtigen Beitrag zur Klärung elektromagnetischer
Phänomene geliefert hat.
In einem konstanten Magnetfeld B befindet sich eine rotierende elektrisch
leitende Scheibe vom Radius R. Durch die Rotation kommt es in der Scheibe zur Bildung eines elektrischen Feldes E, wodurch es zu einem elektrischen Strom kommt. Dieser Strom erzeugt an den Schleifkontakten eine
71
elektrische Spannung
ZR
U≡
E · dr.
(3.19)
r=0
Abbildung 3.2: Ein homogenes Magnetfeld induziert in einer rotierenden
leitenden Scheibe einen elektrischen Strom.
Übung 3.4 Die Literatur kennt viele unterschiedliche Erklärungen für das Funktionieren einer Unipolarmaschine
a.) Erläutere die Funktionsweise der Unipolarmaschine. Gib mindestens zwei unterschiedliche Erklärungen an.
b.) Berechne die Spannung U über das FARADAYsche Induktionsgesetz.
Übung 3.5 Ein quadratischer Rahmen aus Kupfer mit der
Kantenlänge l = 1m und dem Kupferquerschnitt
A = 10−5 m2 wird mit der Geschwindigkeit W =
10m/s unter einem rechten Winkel in ein konstantes Magnetfeld B = 1Vs/m2 hineingeschoben. Für
Kupfer gilt das OHMsche Materialgesetz zwischen
Spannung und Strom U = RI und die Leistung ist
L = U I. R = A/(4lσ) heißt Widerstand, und σ ist
die spezifische Leitfähigkeit von Kupfer.
Berechne die entstehende Spannung sowie die notwendige Kraft, die benötigt wird, den Rahmen in
das Magnetfeld zu schieben.
72
Als nächstes betrachten wir strömende Materie mit dem Geschwindigkeitsfeld υ(t, x). Wir übertragen das FARADAYsche Induktionsgesetz per Postulat auf eine materielle Fläche in dieser Strömung. Die Fläche A(t) mit
Normalenvektor n soll offen sein und hat den Rand ∂A(t). Diesem ist ein
Tangentenvektor τ zugeordnet.
Abbildung 3.3: Materielle Fläche zur Formulierung des Induktionsgesetzes
FARADAYsches Induktionsgesetz (Postulat):
Z
I
d
B · nda = −
(E + υ × B) · τ ds,
dt
A(t)
(3.20)
∂A(t)
woraus für eine geschlossene Fläche folgt
I
d
B · nda = 0.
dt
(3.21)
A(t)
Ein Magnetfeld läßt sich abschalten, und darum folgt aus (3.21)
I
B · nda = 0.
(3.22)
A(t)
Wir können das FARADAYsche Induktionsgesetz als Bilanzgleichung interpretieren. In diesem Zusammenhang sei darn erinnert, dass die bereits behandelten Bilanzgleichungen die Größen Masse, Impuls, Energie und elektrische Ladung an einem gegebenen Volumen bilanzieren. Dagegen wird
im FARADAYsche Induktionsgesetz eine Größe an einer gegebenen Fläche
73
bilanziert. Wir sagen: Der Fluß
Z
Φ=
B · nda
(3.23)
A(t)
des magnetischen Feldes durch eine beliebige offene Fläche A(t) kann nicht
durch Quellen auf A(t) verändert werden, sondern nur durch einen Randfluß auf ∂A(t).
Transporttheoreme für Flächenintegrale. Zur Aufstellung der lokalen
Versionen der magnetischen Flußerhaltung benötigen wir ein Transporttheorem für Flächen. Im Teil 1 dieser Vorlesung haben wir bereits Transportheoreme für Volumina kennengelernt. Auch ein Transportheorem für
Flächen kennen wir aus Teil 1. Aber nur für Funktionen, die ausschließlich
auf der Fläche leben. Die hier vorliegende Situation ist anders, denn das
Magnetfeld ist im ganzen Raum R3 definiert, und nicht nur auf der Fläche
A(t) ⊂ R3 . Wir können deshalb die bereits vorhandenen Formeln hier nicht
verwenden.
Wir betrachten ein Feld B : t ∈ [0, ∞) × x ∈ R3 → R3 und das Integral
(3.23) über eine Fläche A(t), die sich mit der Geschwindigkeit W durch
den R3 bewegt. Siehe hierzu die Abbildung 3.3. Es gilt dann das
Transporttheorem für Flächenintegrale:
Z
Z
I
d
∂B
B ·nda =
(
+W div(B))·nda+
(B ×W )·τ ds. (3.24)
dt
∂t
A(t)
A(t)
∂A(t)
Für materielle Flächen, d.h. wir haben W = υ, ist der Beweis des Transportheorems sehr einfach. Mit Hilfe des Deformationsgradienten F und
−1
der bekannten Formel dai = J Fji dAj wird zunächst das zeitabhängige aktuelle Flächenelement auf ein Flächenelement in der Referenzkonfiguration
zurückgeführt. Außerdem wird der Integrand mit Bezug auf diese Referenzkonfiguration angegeben. Nach dieser Aktion ziehen wir die Zeitableitung
unter das Integral und rechnen das Resultat (3.24) nach bekannten Regeln
formal aus.
Für nichtmaterielle Flächen ist der Beweis schwieriger. Manche Größen,
wie beispielsweise die Flächengeschwingigkeit W , sind dann nämlich nur
auf der Fläche definiert und müssen geeignet in den einbettenden Raum
fortgesetzt werden. Die hiermit zusammenhängende Problematik ignorieren
wir in dieser Vorlesung.
74
Übung 3.6 Beweise das Transportheorem (3.20) für materielle
Flächen und orientiere dich an den entsprechenden
Aufgaben aus Teil 1 dieser Vorlesung.
Etwas komplizierter wird es, falls A(t) durch eine singuläre Fläche I(t)
in zwei Teile gemäß A = A+ ∪ A− aufgeteilt wird. Die singuläre Fläche
I(t) hat die Flächennormale ν und bewegt sich mit der Geschwindigkeit
w durch den Raum. Hierbei wird auf A(t) eine singuläre Linie L(t) mit
Tangente t und Geschwindigkeit w generiert. Wie üblich vereinbaren wir,
dass A+ auf der Seite liegt, wo ν hinzeigt.
Abbildung 3.4: Eine singuläre Fläche I teilt eine materielle Fläche A durch
Generierung einer singulären Linie L in zwei Teile.
Für diese Situation gibt es ein
Transportheorem für Flächen bei Vorhandensein einer singulären Linie:
d
dt
Z
Z
B · nda =
A+ (t)∪A− (t)
∂B
+ W div(B)) · nda +
(3.25)
∂t
A+ ∪A−
I
I
(B × W ) · τ ds − ([[B]] × w) · tds
(
∂A+ \L∪∂A− \L
L
Lokale Version der magnetischen Flußerhaltung. Mit Hilfe der beiden Transporttheoreme (3.24) und (3.25) ist es eine leichte Aufgabe, die
75
Aussagen (3.20) und (3.22) des globalen FARADAYschen Induktionsgesetzes, in die entsprechenden lokalen Formen zu bringen. Wir betrachten
zunächst den Fall ohne singuläre Linie, und eliminieren die Zeitableitung
in (3.20) über das Transportheorem (3.24). Auf das Linienintegral wenden
wir den Satz von STOKES an, siehe (I-2.11), so dass wir mit einem Flächenintegral über eine beliebige Fläche enden, welches Null ist. Es folgt,
dass dann auch der Integrand null sein muss. Die Ausage (3.22) formen wir
mit dem Satz von GAUSS um, siehe (I-2.6), und schließen analog. Es folgt
das
Lokale FARADAYsche Induktionsgesetz in regulären Punkten:
∂B
+ rot(E) = 0 und div(B) = 0.
∂t
(3.26)
Als nächstes geben wir die entsprechenden Gesetze in singulären Punkten
an. Die singuläre Version von (3.26)1 beschreibt den Übergang an einer
singulären Linie, die eine Fläche in zwei Teile teilt, wie in Abbildung 3.4
illustriert. Dagegen ist die globale Form des Gesetzes (3.26)2 über den Satz
von GAUSS durch Volumenintegral darstellbar. Folglich beschreibt dessen
singuläre Version den Übergang an einer Fläche, welche ein Volumen in
zwei Teile teilt.
Es gilt das
Lokale FARADAYsche Induktionsgesetz in singulären Punkten:
−wν [[B]] + ν × [[E]] = 0 für x ∈ L(t).
(3.27)
[[B]] · ν = 0 für x ∈ I(t).
(3.28)
sowie
Der Beweis bringt keine neuen Einsichten, und deshalb wird er hier unterdrückt. Der Leser sollte trotzdem versuchen, die entsprechenden Schritte
in Analogie zu den bereits mehrfach in dieser Vorlesungen aufgeführten
Argumenten aufzuschreiben.
Zwischenzusammenfassung. Wir haben bisher zwei Erhaltungssätze kennengelernt: Den Satz von der Erhaltung der elektrischen Ladung und den
aus zwei Teilen bestehenden Satz von der Erhaltung des magnetischen Flus-
76
ses. Beispielsweise haben wir also in regulären Punkten
∂ne
+ div(j e ) = 0,
∂t
∂B
+ rot(E) = 0,
∂t
div(B) = 0.
(3.29)
(3.30)
(3.31)
Weitere Erhaltungsgleichungen, die unabhängig sind von (3.29)-(3.30) und
deren singulären Versionen, kennt die Elektrodynamik nicht.
Wir haben somit unser Ziel, die Berechnung des elektromagnetischen Feldes
(E, B) aus vorgegebenen Ladungs- und Stromverteilungen, noch nicht erreicht. Denn offensichtlich benötigen wir hierzu noch Materialgleichungen,
welche die in (3.29)-(3.30) auftretenden Felder verknüpfen. Deren Formulierung basiert auf einem bedeutsamen Zwischenschritt, der jetzt folgt.
Ladungspotential und Strompotential. Aus der Erhaltungsgleichung
(3.29) für die elektrische Ladung können wir eine weitere Flächenbilanz
herleiten. Die Gleichung (3.29) kann nämlich durch Einführung von zwei
neuen Größen identisch erfüllt werden.
Darstellung von Ladung und Strom durch Potentiale in regulären Punkten:
ne = div(D) und j e = −
∂D
+ rot(H).
∂t
(3.32)
Die Funktion D : t ∈ [0, ∞) × x ∈ R3 → R3 heißt Ladungspotential, und
H : t ∈ [0, ∞) × x ∈ R3 → R3 ist das Strompotential.
Die Behauptung folgt unmittelbar durch Einsetzen von (3.32) in die lokale
Ladungserhaltung (3.29).
Wir erkennen durch Vergleich mit der Argumentation zum FARADAYschen Induktionsgesetz, dass die Darstellungen (3.32) die lokalen Versionen
von globalen Bilanzgleichungen in regulären Punkten sind.
Aus diesen globalen Bilanzgleichungen, die wir hier aber nicht weiter besprechen, folgt die
77
Darstellung von Ladung und Strom durch Potentiale in singulären Punkten:
+wν [[D]] + ν × [[D]] = j eI
für x ∈ L(t).
(3.33)
sowie
[[D]] · ν = neI
für x ∈ I(t).
(3.34)
Wir haben diese Zusammenhänge hier nur der Vollständigkeit wegen angegeben. Benutzen werden wir sie in dieser Vorlesung nicht, und darum
verzichten auf den Beweis.
Einige Bemerkungen zum Schluß dieses Abschnittes. Die Gleichungen für
die Felder D und H wurden historisch mittels vollkommen anderer Argumentationsketten gefunden als soeben beschrieben. Deshalb heißen D und
H historisch auch nicht Ladungs- und Strompotential, sondern stattdessen
• D - elektrische Induktionsdichte
• H - magnetische Feldstärke
Aus den Gleichungen (3.33) und (3.34) lesen wir als Einheiten für D und
H ab:
C
A
[D] = 2 und [H] = .
(3.35)
m
m
Durch Vergleich mit den entsprechenden Einheiten der magnetischen Induktionsdichte, [B]=Vs/m2 und für die elektrische Feldstärke, [E]=V/m,
wird natürlich die historische Namensgebung klar.
MAXWELLsche Gleichungen und MAXWELL-LORENTZ Ätherrelationen. Wir beschränken die nun zu führende Diskussion auf die lokalen Gleichungen in regulären Punkten.
Das folgende System von vier Gleichungen heißt
MAXWELLsche Gleichungen:
∂B
+ rot(E) = 0
∂t
∂D
−
+ rot(H) = j e
∂t
div(B)
div(D) = ne
(3.36)
(3.37)
Es ist offensichtlich: Dieses System reicht nicht aus zur Berechnung der elektromagnetischen Felder aus vorgegenen Ladungs- und Stromverteilungen.
Zu diesem Zweck müssen die MAXWELLschen Gleichungen durch weitere
78
Gleichungen ergänzt werden, die eine Verbindung herstellen zwischen den
Paaren (E, B) und (D, H).
Interessanter Weise sind die folgenden durch Messungen gefundenen Gleichungen sehr einfach und universeller Natur, d.h. sie sind materialunabhängig.
MAXWELL-LORENTZ Ätherrelationen:
D = ε0 E
H=
1
B
µ0
mit ε0 =
1
c2 µ
(3.38)
0
Es treten drei Konstanten auf. Die Lichtgeschwindigkeit c = 299.792.458
m/s, die magnetische Permeabiltät µ0 = 4π10−7 Vs/Am und die dielektrische Konstante ε0 , welche aus den beiden anderen Konstanten berechnet
werden kann.
Der Zahlenwert der Lichtgeschwindigkeit wurde früher unabhängig von der
MAXWELLschen Theorie gemessen. Er ist aber seit einiger Zeit per Gesetz
auf den angegebenen Wert festgesetzt, wodurch die Längeneinheit Meter
als Grundeinheit abgeschafft ist und durch eine genauere Zeitmessung ersetzt wird. Der Zahlenwert der Permeabilität entspringt der Definition der
Einheit AMPERE (A) für die Stromstärke.
Die Frage nach der Gültigkeit der MAXWELL-LORENTZ Ätherrelationen
führt uns auf ein äußerst subtiles Gebiet. Außerdem hängt diese Frage
eng mit einer anderen Frage zusammen: Für welchen Beobachter gelten
eigentlich die MAXWELLschen Gleichungen?
In diesem Zusammenhang erwähnen wir eine merkwürkwürdige Beobachtung.
Wenn wir die MAXWELL-LORENTZ Ätherrelationen in die MAXWELLschen Gleichungen einsetzen, entstehen hyperbolische Gleichungen 2. Ordnung, welche die Ausbreitung von elektromagnetischen Wellen mit der soeben eingeführten Geschwindigkeit c beschreiben. Ein Studium dieser Gleichungen liefert das zunächst paradox anmutetende Resultat, dass sich elektromagnetische Wellen unabhängig vom Bewegungszustand der Quelle und
unabhängig vom Bewegungszustand des messenden Beobachters mit der
Geschwindigkeit c aus den MAXWELL-LORENTZ Ätherrelationen ausbereitet.
Dass diese Aussage ein Kuriosum ist, erkennen wir nach Behandlung der
folgenden Übung, in welcher wir das Verhalten einer elastischen Welle in
Luft studieren.
79
Übung 3.6 Betrachte die Ausbreitung eines endlichen, aus N
Perioden bestehenden Wellenzug, der sich in positive x- Richtung bewegt. Nimm an, dass es sich
hierbei um eine elastische Schallwelle in Luft handelt.
a.) Ein Beobachter, der relativ zur Luft ruht, mißt
die Frequenz ν ein zweiter Beobachter, der sich mit
der Geschwindigkeit V gegen die Luft bewegt mißt
eine andere Geschwindigkeit ν̄. Zeige, dass gilt
ν̄ = ν(1 −
V
),
c
(3.39)
wobei c die Schallgeschwindigkeit ist.
b.) Betrachte jetzt eine Schallquelle, die den endlichen Wellenzug mit einer Frequenz νQ erzeugt.
Die Quelle soll sich jetzt gegen die Luft mit der
Geschwindigkeit VQ bewegen. Zeige, dass ein Beobachter, welcher gegen die Luft ruht, die Frequenz
ν = νQ (1 −
VQ −1
) ,
c
(3.40)
mißt.
c.) Erläutere die Resultate.
Hinweis: Beachte, dass die Zahl N der Perioden
eine Invariante ist, d.h. diese Zahl hängt weder
vom Bewegungszustand der Quelle noch vom Bewegungszustand des Beobachters ab.
Die vierdimensionale Formulierung der MAXWELLschen Gleichungen. Zur Beantwortung der gestellten Fragen ist eine Vorbereitung
notwendig, die zunächst sehr formal aussieht. Diese Vorbereitung schafft
aber die Grundlage zur Aufstellung sehr einfacher Antworten.
Wir fassen die Zeitkoordinate t und den Ortsvektor x = (x1 , x2 , x3 ) zu einem vierdimensionalen Gebilde zusammen, welches wir die Weltkoordinaten
eines Weltpunktes nennen:
(xA )A∈{0,1,2,3} = (t, x1 , x2 , x3 ).
(3.41)
Ein weiteres vierdimensionales Gebilde erzeugen wir durch Zusammenfas80
sung von elektrischer Ladungsdichte ne und Stromdichte j e = (j1e , j2e , j3e )
gemäß
(j A )A∈{0,1,2,3} = (ne , j1e , j2e , j3e ).
(3.42)
Wir nennen die Kombination j A die Komponenten des Ladungs-Strom Vektors. Durch die Einführung dieses Vektors im R4 können wir den Erhaltungssatz der elektrischen Ladung (3.29) sehr kompakt als Aussage über
eine vierdimensionale Divergenz schreiben:
∂j A
= 0.
∂xA
(3.43)
Eine ähnliches Programm läßt sich auch für die MAXWELLschen Gleichungen (3.36) und (3.37) durchführen. Zu diesem Zweck kombinieren wir
die Paare (E, B) und (D, H) zu vierdimensionalen Matrizen
0 −E1 −E2 −E3
0
D1
D2
D3
E1
0
B3 −B2
0
H3 −H2
η AB = −D1
.
ϕAB =
E2 −B3
−D2 −H3
0
B1
0
H1
E3 B2 −B1
0
−D3 H2 −H1
0
(3.44)
Die hier neu eingeführten antisymmetrischen Matrizen heißen
• ϕ - FARADAY Tensor
• η - Ladungs-Strom Potential
Wie wir demnächst sehen werden, steckt hinter der unterschiedlichen Stellung der Indizes in den Definitonsgleichungen für ϕ und η ein tieferer Sinn.
Zunächst aber führen wir in Analogie zu (I-1.63) aus dem ersten Teil dieser
Vorlesung das vollständig antisymmetrische Symbol im R4 ein:
falls ABCD eine gerade Permutation von 0123 ,
1
−1
falls ABCD eine ungerade Permutation von 0123 ,
εABCD =
0
falls zwei Indizes gleich sind.
(3.45)
Mit diesen Hilfsmitteln können wir die MAXWELLschen Gleichungen (3.36)
und (3.37) umschreiben in die
Vierdimensionale Form der MAXWELLschen Gleichungen:
εABCD
∂ϕCD
= 0 und
∂xB
81
∂η AB
= j A.
∂xB
(3.46)
In Worten: Im hiesigen Kontext macht das FARADAYsche Induktiongesetz
eine Aussage über eine vierdimensionale Rotation, wogegen die Darstellung
von Ladungsdichte und Strom sich als vierdimensionale Divergenz schreiben läßt.
Transformationsverhalten der elektrodynamischen Felder. Wir stellen einen Weltpunkt durch zwei verschiedene Komponentensätze dar, die
durch eine eineindeutige sonst aber beliebige Transformation verküpft sein
sollen:
A
xA = x̂ (t, x1 , x2 , x3 ) ⇔ xA = x̂A (t, x1 , x2 , x3 ).
(3.47)
Wie sich die dreidimensionalen Versionen von Divergenz und Rotation
transformieren, haben wir ausführlich in Teil I dieser Vorlesung im Abschnitt I-1.4 analysiert. Es ist offensichtlich, dass eine Erhöhung der Dimensionszahl an den dort gefundenen Eigenschaften nichts ändert.
Auf dieser Grundlage postulieren wir das Transformationsverhalten der
elektrodynamischen Felder unter der Transformatiom (3.47) derart, dass
die MAXWELLschen Gleichungen in der Form (3.46) ihre Struktur in beliebigen Koordinaten beibehalten. Diese Forderung impliziert das
Transformationsverhalten der elektrodynamischen Felder
∂x ∂ x̄A B
j̄ = det( ) B j
∂ x̄ ∂x
A
ϕ̄AB
∂xA ∂xB
=
ϕCD
∂ x̄C ∂ x̄D
η̄
AB
∂x ∂ x̄A ∂ x̄B CD
= det( ) C D η
∂ x̄ ∂x ∂x
(3.48)
Der Beweis dieser Behauptung ist einfach aber lang. Die behaupteten Transformationsformeln werden in die MAXWELLschen Gleichungen eingesetzt,
die Ableitungen werden mit der Kettenregel umgerechnet und nach Einführung des Transformationsgesetzes für das ε -Symbol, welches analog zu
(I-1.67) gebildet wird, folgt die behauptete Invarianz der MAXWELLschen
Gleichungen unter der Transformation (3.47).
Aufgrund ihrer essentiellen Bedeutung fassen wir die wesentlichen Annahmen noch einmal zusammen.
• Die MAXWELLschen Gleichungen sind nur invariant bezüglich beliebiger Raum-Zeit- Transformationen, wenn sie in den Feldern (E, B)
und (D, H) angegeben werden.
• Die Matrix (3.50)1 ist als kovarianter absoluter antisymmetrischer
Tensor zweiter Stufe definiert.
82
• Die Matrix (3.50)2 ist als kontravariante antisymmetrische Tensordichte zweiter Stufe definiert.
• Ebenso ist der Ladungs-Strom Vektor als kontravariante Vektordichte
definiert.
Beachte: Die Einführung von Vektor- bzw. Tensordichten impliziert, dass
partielle Ableitungen nicht zu kovarianten Ableitungen werden, sondern
partielle Ableitungen bleiben. Dies garantiert, dass Erhaltungsätze für jeden Beobachter Erhaltungssätze bleiben. Beim FARADAYsche Induktionsgesetz (3.46)1 wird dies auch mit einem absoluten Tensor erreicht, da der
Differentiationsoperator eine Rotation ist.
Übung 3.7 Wende die Transformationsformeln auf der elektrodynamischen Felder auf eine GALILEI Transformation an, d.h. auf
t̄ = t x̄i = Oi j xj − V i t,
(3.49)
mit der zeitlichen konstanten orthogonalen Matrix
O und der konstanten Geschwindigkeit V .
a.) Berechne das Transformationsverhalten von ne ,
j e , E, B, D und H.
b.) Erläutere ausführlich das Ergebnis. Insbesondere im Hinblick auf die Klassifizierung der unter
a.) genannten Größen als objektive Skalare bzw.
Vektoren unter GALILEI Transformation.
Hinweis: Beachte, dass die Raum-Raum
Komponenten von ϕ und η die Strukturen
(εijk Bk )i,j,k∈{1,2,3} bzw. (εijk Hk )i,j,k∈{1,2,3} haben.
Übung 3.8 a.) Erläutere an einem Beispiel welche mathematische Struktur ein Erhaltungssatz haben muss.
b.) Zeige ebenfalls an einem Beispiel, dass eine
kovariante Ableitung, die durch eine Zeit-RaumTransfomation generiert wird, nicht in einem Erhaltungssatz auftreten darf.
c.) Warum treten bei der Bildung einer Rotation
nur partielle Ableitungen auf?
83
Vierdimensionale Formulierung der MAXWELL-LORENTZ Ätherrelationen. Als nächstes versuchen wir die Relationen D = 1/(µ0 c2 )E und
H = 1/µ0 B in eine vierdimensionale Form zu bringen.
Wir stellen nach einigem Probieren aber fest, dass dies keine Beziehung
zwischen η AB und ϕAB sein kann. Aufgrund unserer Erfahrungen aus Teil
I dieser Vorlesung können wir vermuten, dass wir für eine vierdimensionale
Formulierung der MAXWELL-LORENTZ Ätherrelationen die kontravarianten Komponenten von ϕAB benötigen. Hätten wir eine vierdimensionale
Metrik gAB zur Verfügung, könnten wir unsere Vermutung sofort überprüfen, denn aus der Inversen g AB folgt natürlich
ϕAB = g AC g BD ϕCD .
(3.50)
Wie aber sieht die Metrik g AB aus? Auch zur Beantwortung dieser Frage
hilft probieren, was aber hier gar nicht schwer ist.
Vierdimensionale Formulierung der MAXWELL-LORENTZ
Ätherrelationen.
In einem Beobachtersystem mit den Weltkoordinaten xA , wo gilt
1
0
0
0
c2
0 −1 0
1
0
AB
AB
g AB =
(3.51)
0 0 −1 0 folgt η = µ0 (−g) ϕ .
0 0
0 −1
−g ist der Betrag der Determinante der Komponenten gAB .
84