Übungsaufgaben zur Vorlesung Regelungssysteme
Werbung

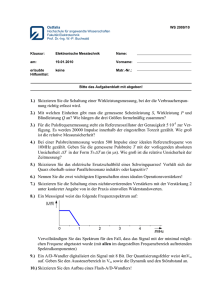
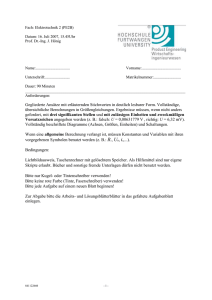
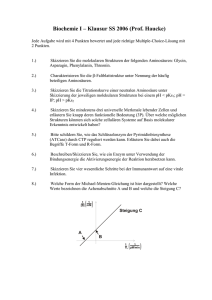
Übungsaufgaben zur Vorlesung Regelungssysteme (Grundlagen) TU Bergakademie Freiberg Institut für Automatisierungstechnik Prof. Dr.-Ing. Andreas Rehkopf 27. Januar 2014 Übung 1 - Vorbereitung zum Praktikum Prozessregelung 1. Modellierung des Streckenverhaltens a) Stellen Sie die nichtlineare Differentialgleichung für den Füllstandsbehälter (iV → h) anhand der Bilanzgleichung auf. b) Linearisieren Sie die DGL mittels Taylorreihenentwicklung. c) Bestimmen Sie die Differentialgleichungen für die weiteren Teilsysteme (h → im , im → um , um → uF ). d) Geben Sie die Gleichung des Gesamtsystems an. e) Leiten Sie die Übertragungsfunktion aus der DGL her. 2. Vorbereitung Reglerentwurf a) Stellen Sie den allgemeinen Regelkreis mit Führungsgröße, Last- und Speisestörung als Blockschaltbild dar. b) Identifizieren Sie die einzelnen Größen für das Beispiel der Füllstandsregelung. c) Geben Sie den funktionalen Zusammenhang für die Eingangs- und Ausgangsgrößen wieder. d) Geben Sie die Übertragungsfunktion des realen PID-Reglers an. e) Skizzieren Sie jeweils die Sprungantwort der einzelnen Anteile sowie die des gesamten Reglers. f) Welche Bedeutung hat der Tiefpassfilter für die Regelung? 3. (ZA) Lösung der Differentialgleichung a) Lösen Sie die linearisierte Differentialgleichung des Füllstandsbehälters für ein sprungförmiges Eingangssignal. b) Im Praktikumsversuch wird die Füllhöhe für verschiedene Ventilstellungen bestimmt. Ist nach einem Stellgrößensprung der Endwert mit einer vorgegebenen Genauigkeit (von bspw. 95 %) erreicht, so wird die zugehörige Höhe abgelesen. Welchen Einfluß hat die Sprunghöhe xe0 auf den Ablesezeitpunkt? Übung 2 - Vorbereitung zum Praktikum Stabilität durch Regelung 1. Grundlagen Stabilität für PT2 -Systeme a) Geben Sie die allgemeine Differentialgleichung eines PT2 -Systems mit Dämpfungsfaktor D an und stellen Sie den Zusammenhang zur allgemeinen DGL n-ter Ordnung durch Parameterabgleich her. b) Geben Sie die allgemeine Berechnungvorschrift für die Pole des Systems an. c) Bestimmen Sie für D = 0, D = 1, D > 1, 0 < D < 1, D = −1, D < −1 und −1 < D < 0 Folgende Eigenschaften: • Pole (mathematische Beschreibung und Lage im Pol-Nullstellen-Plan) • Stabilität • Schwingungsverhalten • Verlauf der Sprungantwort (Skizze) 2. Modellierung des Schwebekörpersystems a) Geben Sie alle Kräfte an, welche auf den Schwebekörper einwirken. b) Bestimmen Sie die Differentialgleichung des Systems. c) Berechnen Sie die Pole und treffen Sie eine Aussage zur Stabilität. d) Lösen Sie die Differentialgleichung für einen sprungförmigen Eingangssteuerstrom der Höhe ISt,0 . 3. Regelung der Strecke Geben Sie die Differentialgleichungen für den jeweiligen Reglertyp an. Bestimmen Sie die Gleichung für den geschlossenen Kreis und treffen Sie eine Aussage zur Stabilität in Abhängigkeit der Reglerparameter. Welche bleibende Regelabweichung tritt beim jeweiligen Reglertyp auf? a) P-Regler b) PD-Regler c) PID-Regler 1. Systeme erster Ordnung Das dynamische Verhalten einer Strecke wird durch die Übertragungsfunktion F (p) = K Tp + 1 beschrieben. a) Wie nennt man dieses Übertragungsglied? b) Geben Sie die korrespondierende Differentialgleichung an. Identifizieren Sie dazu zunächst a0 , b0 und b1 . c) Charakterisieren Sie die DGL. d) Skizzieren und beschriften Sie die Übergangsfunktion h(t). Tragen Sie die Systemparameter K und T ein. e) Nennen Sie ein Beispiel für ein solches System. 2. Systeme erster Ordnung - Lösung der DGL Für das System T ẋa (t) + xa (t) = Kxe (t) sind folgende Parameter gegeben: T = 10s und K = 2. a) Geben Sie die homogene Differentialgleichung an. b) Berechnen Sie alle Pole des Systems und stellen Sie deren Lage grafisch dar. c) Ist das vorliegende System stabil? Begründen Sie ihre Antwort. d) Geben Sie die homogene Lösung xh (t) der Differentialgleichung an. e) Das System wird durch einen Sprung der Höhe xe0 angeregt. Berechnen Sie die partikuläre Lösung xpart (t) der Differentialgleichung. f) Geben Sie die Gesamtlösung der Differentialgleichung xges (t) an. g) Bestimmen Sie den unbekannten Parameter aus der Gesamtlösung, wenn die Anfangsbedingung xges (t = 0) = 0 gilt. h) Skizzieren und beschriften Sie die Übergangsfunktion h(t). Tragen Sie die Systemparameter K und T ein. 3. Systeme erster Ordnung - Regelung Die Strecke FS (p) = 3 15p + 1 soll mit einem P-Regler geregelt werden. a) Geben Sie die Übertragungsfunktion FR (p) des Reglers an. b) Bestimmen Sie die Übertragungsfunktion FW (p) für das Führungsverhalten des geschlossenen Kreises, wenn die Verstärkung des Reglers KR = 5 beträgt. c) Der Sollwert wird sprungartig um 1 erhöht. Bestimmen Sie den Faktor der bleibenden Regelabweichung wx . d) Am Eingang der Strecke greift eine sprungartige Störung z = 2 an. Wie groß ist die Abweichung vom Arbeitspunkt, wenn das System den stationären Zustand erreicht? e) Welcher Reglertyp ermöglicht es, die bleibende Regelabweichung zu eliminieren? Begründen Sie ihre Antwort. 4. Systeme erster Ordnung - Parameterbestimmung (Identifikation) Für eine Strecke wird das Modell F (p) = K Tp + 1 angenommen. Im Beharrungszustand wurde folgender Zusammenhang zwischen Ein- und Ausgangsgröße gemessen: xe xa 2 1.2 3 2.3 4 4.2 5 4.8 6 7.4 Tabelle 1: Messwerte im Beharrungszustand Weiterhin wurde die Eingangsgröße xe sprungartig geändert (kein Einheitssprung) und der Verlauf der Ausgangsgröße aufgezeichnet. Abbildung 1: Sprungantwort (kein Einheitssprung) a) Zeichnen Sie die statische Kennlinie der Strecke. b) Ermitteln Sie grafisch die Verstärkung K und die Zeitkonstante T der Strecke. c) Bestimmen Sie die Höhe xe0 des Eingangssprunges und skizzieren Sie den Verlauf. 5. Systeme zweiter Ordnung - Lösung der DGL Gegeben ist folgende Differentialgleichung: 10ẍa (t) + 7ẋa (t) + xa (t) = xe (t) a) Welches regelungstechnische Übertragungsglied liegt vor? b) Wie lautet die homogene Gleichung des Systems? c) Wie lautet die charakteristische Gleichung? d) Berechnen Sie die Pole des Systems. e) Ist das System stabil? Begründen Sie Ihre Antwort. f) Geben Sie die homogene Lösung der Differentialgleichung an. g) Das System wird durch einen Sprung der Höhe xe0 angeregt. Berechnen Sie die partikuläre Lösung. h) Wie lautet die Gesamtlösung xges (t)? i) Bestimmen Sie die unbekannten Parameter c1 und c2 durch die Anfangsbedingungen ẋges (0) = xges (0) = 0. j) Skizzieren Sie die Übergangsfunktion h(t). 6. Systeme zweiter Ordnung - Regelung Ein System 2. Ordnung wird durch die folgende Differentialgleichung beschrieben: ẍ(t) − 25ẋ(t) − 5x(t) = 2y(t) a) Treffen Sie eine Aussage zur Stabilität des Systems und begründen Sie Ihre Antwort. b) Das System ist mit Hilfe eines PD-Reglers zu regeln. Geben Sie die Differentialgleichung für diesen Reglertyp an. c) Geben Sie die Differentialgleichung des geschlossenen Regelkreises an. d) Untersuchen Sie das Gesamtsystem bezüglich Stabilität in Abhängigkeit der zwei Reglerparameter. e) Die Reglerverstärkung sei 10, die Vorhaltezeit beträgt 3 s. Bestimmen Sie den Faktor der bleibenden Regelabweichung wx . f) Wie lässt sich die bleibende Regelabweichung eliminieren? 7. Blockschaltbildalgebra Stellen Sie die Gesamtübertragungsfunktion FGes als Funktion der jeweiligen Teilübertragungsfunktionen mit Rechenweg dar. a) b) c) d) 8. Systeme erster Ordnung - Kenngrößen Für ein PT1 -System sind die Parameter T = 10 s und K = 3 gegeben. a) Stellen Sie die zugehörige Differentialgleichung auf und geben Sie deren Lösung für ein Sprungsignal der Höhe xe0 an. b) Wie lange benötigt das System bei einem Einheitssprung, bis 99 % des Endwertes erreicht sind? c) Auf welche Zeitspanne verändert sich der in b) ermittelte Wert, wenn die Sprunghöhe xe0 verdoppelt wird? d) Das System ist mit einem P-Regler zu regeln. Wie groß muss die Reglerverstärkung KR sein, wenn die Abweichung vom Endwert maximal 5 % betragen soll? e) Die Zeitdauer, bis das geregelte System 99 % seines Endwertes erreicht hat, soll auf 1, 5 s begrenz werden. Wie muss KR gewählt werden? 9. Systeme erster Ordnung - Anstiegsantwort Für ein System erster Ordnung ist folgende Übertragungsfunktion gegeben: F (p) = Xa (p) K = Xe (p) Tp + 1 a) Welches regelungstechnische System liegt vor? b) Geben Sie die zugehörige Differentialgleichung an. c) Bestimmen Sie die Polstellen des Systems und geben Sie die homogene Lösung der Differentialgleichung an. d) Bestimmen Sie die partikuläre Lösung, wenn am Eingang eine Rampenfunktion (Anstiegsfunktion) xe (t) = mt anliegt. e) Geben Sie die Gesamtlösung xges (t) an und bestimmen Sie den Parameter c, wenn die Anfangsbedingung xges (t = 0) = 0 gilt. f) Skizzieren Sie den Verlauf der Anstiegsantwort für eine Einheitsrampe (m = 1). 10. Systeme zweiter Ordnung - Schwingungsverhalten Ein System zweiter Ordnung wird durch die Differentialgleichung T 2 ẍa (t) + 2DT ẋa (t) + xa (t) = Kxe (t) beschrieben. Die Parameter sind mit T = 10 s, D = 0, 6 und K = 1 gegeben. a) Welches regelungstechnische System liegt vor? b) Bestimmen Sie die Polstellen des Systems und skizzieren Sie deren Lage. c) Geben Sie die homogene Lösung der Differentialgleichung an. d) Bestimmen Sie die partikuläre Lösung, wenn am Eingang eine Einheitssprungfunktion anliegt. e) Geben Sie die Gesamtlösung xges (t) an und bestimmen Sie die unbekannten Parameter. f) Skizzieren Sie den Verlauf der Übergangsfunktion. g) Zu welchem Zeitpunkt erreicht die Übergangsfunktion ihr Maximum? Wie groß ist dieser Maximalwert? 11. Systeme mit integralem Verhalten Ein regelungstechnischer Prozess wird durch die Differentialgleichung T1 ẋa (t) + xa (t) = 1 TN Z xe (t) dt mit T1 = 5 s und TN = 10 s beschrieben. a) Welches regelungstechnische Übertragungsglied liegt vor? b) Ist das vorliegende System stabil? Begründen Sie Ihre Antwort. c) Das System ist mit Hilfe eines idealen PD-Reglers zu regeln. Geben Sie die Differentialgleichung für den Regler an und bestimmen Sie die Differentialgleichung des geschlossenen Kreises für Führungs- und Speisestörverhalten. d) Wie groß ist die bleibende Regelabweichung nach einem Führungsgrößensprung der Höhe w0 ? e) Die Reglerverstärkung sei KR 6= 1. Das System befindet sich im Arbeitspunkt. Am Eingang der Strecke greift eine sprungförmige Störung der Höhe z0 an. Wie groß ist die Auslenkung des Systems vom Arbeitspunkt im stationären Zustand? f) Für das Führungsverhalten sei die Reglerverstärkung 2. Wie groß ist die Vorhaltezeit, wenn der geschlossene Kreis ein nichtschwingendes Verhalten aufweisen soll. 12. Systeme mit differentiellem Verhalten Ein regelungstechnischer Prozess besitzt die Übertragungsfunktion F (p) = Xa (p) KD p = Xe (p) (T1 p + 1)(T2 p + 1) mit T1 = 6 s, T2 = 5 s und KD = 2. a) Welches regelungstechnische Übertragungsglied liegt vor? b) Ist das vorliegende System stabil? Begründen Sie Ihre Antwort. c) Berechnen sie die Übergangsfunktion des Systems mit Hilfe der Laplacetransformation. Hinweis: σ(t) c s1 e−at c s p 1 p+a d) Welchen Endwert nimmt h(t) im stationären Zustand ein? e) Das System ist mit Hilfe eines I-Reglers zu regeln. Welches regelungstechnische Verhalten zeigt der geschlossenen Kreis? f) Ist das Gesamtsystem für eine Nachstellzeit von TN = 1 s schwingungsfähig? g) Wie groß ist der Faktor der bleibenden Regelabweichung bei gleicher Nachstellzeit? Lösungen t 5 c) h) i) 6 d) 7 e) a) xges (t) = 2xe0 1 − e− 10 x 15 w = 16 3 x= 8 K ≈ 1, 7 T ≈ 6s xe0 ≈ 1, 6 t t xges (t) = c1 e− 2 + c2 e− 5 + xe0 c1 = 23 xe0 c2 = − 35 xe0 KR > 52 TV > 2 25 KR 4 x w = 3 F1234567 = F7 F2 F3 + F1 1+FF4 4F5 F6 b) F123456 = −F1 F6 c) F123456 = d) F123456 = 2 3 4 g) c) d) b) F2 1−F2 F5 (F3 −F4 ) F1 F2 − F6 F4 F5 + 1+F 1 F2 F 3 1 F 2 F1 F6 −F4 +F3 1+F 2 F 2 1+F5 F1 F6 −F4 +F3 1+F 2 b) d) e) e) t ≈ 4, 61 T KR > 19 3 KR = 9, 9 i h t xges (t) = Km t + T e− T − 1 10 e) g) 11 d) e) f) c) d) xges (t) = e− 50 t − cos tmax = 25 2 π 3 xges (tmax ) = e− 4 π + 1 x a = w0 xa = Kz0R TV ≥ 5 t t h(t) = 2 e− 6 − e− 5 lim h(t) = 0 8 9 12 g) 3 t→∞ xa 2 w = 3 h 2 25 t − 34 sin i 2 25 t +1