Physik für Elektrotechniker und Informatiker
Werbung

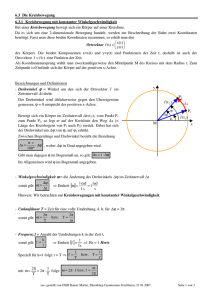
Physik für Elektrotechniker und Informatiker Grundlagenvorlesung 1. & 2. Semester Inhaltsverzeichnis 0. Allgemeine Einführung in das naturwissenschaftliche Fach Physik 0.1. Stellung und Bedeutung der Physik – Was ist Physik? 0.2. Rolle des Experimentes, Messen, Maßsysteme 0.3. Physikalische Modelle, Hypothesen, Theorien, Rolle der Mathematik A Mechanik von Massepunkten und starren Körpern 1. Kinematik 1.1. Der Orstsvektor 1.2. Die geradlinige Bewegung = Translation (Beispiele) 1.3. Die Kreisbewegung = Rotation Beispiele: ohne Beschränkung der Allgemeinheit zunächst nur: Eindimensional 1 D Gleichförmige Bewegung: dx x vo x const dt dx vo x dt vx t x t t dx x x0 t 0 t v0 x dt ' v0 x dt t 0 ' v0 x t x t x0 v0 x t x t x0 v0 x t Gleichmäßig beschleunigte Bewegung: x dv x t a x const dt vx t dv x a x dt t dv x t a x dt ' a x t 0 v0 x dt ' ax t t 0 v x t v0 a x t v x t v0 x a x t x dx d x v x dt x0 t t v x dt ' t 0 v t 0 0x a x t ' dt ' 1 v0 x t a x t 2 2 x t x0 v 0 x t ax 2 t 2 Diese Formeln finden Sie alle in dieser oder ähnlicher Darstellung in Tabellenbüchern. Tafelwerke helfen allerdings nicht weiter im folgenden Beispiel: Ungleichmäßig beschleunigte Bewegung: ax ax t spezielle Funktion dx t dv x t a x t dt x t v0 x d x t t k tdt m t k ' ' k k 2 ' ' t 0 m t dt m t 0 t dt 2m t Anfangsgeschwindigkeit beachten k 2 bzw. x t v0 x t 2m x t ax t k t m dx x t dt x t x0 t dx v t 0 0x k '2 ' k 3 t dt v0 x t t 2m 6m x t x0 v 0 x t k 3 t 6m Empfohlene Literatur zu diesem Kapitel: Hering, Martin; Stohrer: Physik für Ingenieure, 10. Auflage, Lehrbuch, Springer Verlag, ISBN 978-3-540-71855-0, Seiten 29 bis 39 1.3. Die Kreisbewegung Wählt man bei der Beschreibung der Kreisbewegung den Kreismittelpunkt M (xM;yM) als Bezugspunkt, ändert sich nur die Richtung des Ortsvektors r t r0 r rˆ , nicht aber dessen Betrag. r r t r0 rˆ t , r0 const r (8) Zweckmäßig ist die Einführung von ebenen Polarkoordinaten r (Radius) und 𝞅 (zeitabhängiger Drehwinkel): Winkelkoordinate t Transformationsgleichungen x r cos y r sin x2 y2 r 2 x cot y y tan x arc tan Definition: y x Winkelgeschwindigkeit t d t t dt (9) Winkelbeschleunigung d t d 2 t t t dt dt 2 (10) Bei konstanter Winkelgeschwindigkeit spricht man von einer gleichförmigen, bei konstanter Winkelbeschleunigung von einer gleichmäßig beschleunigten Kreisbewegung. s bzw. r , v a sind Vektoren Frage: Kann man Drehbewegungen vektoriell erfassen? Gleichförmige Drehbewegungen werden durch eine Größe der Winkelgeschwindigkeit und einen Drehsinn bzw. eine Richtung beschrieben. Die konkrete Frage ist nun, ob es folgende Analogie gibt: Weg s Winkel Geschwindigkeit v Beschleunigung a Winkelgeschwindigkeit Winkelbeschleunigung Es zeigt sich, dass eine vektorielle Darstellung für und möglich ist, nicht aber für Winkel. Wenn Winkel als Vektoren darstellbar wären, müssten sie auch dem Gesetz der Kommutativität der Vektoraddition. gehorchen, d.h., die Hintereinanderausführung zweier Drehungen um zwei beliebig gewählte Achsen müsste von der Reihenfolge unabhängig sein. Die beiden Sequenzen der Drehung um y- und z-Achse sind nicht vertauschbar. Die Prozedur „erste Drehung um y-Achse, zweite Drehung um z-Achse“ führt zu einem anderen Ergebnis als die umgekehrte Aufeinanderfolge „erste Drehung um z, zweite Drehung um y“. Ferner spricht die Definition des Skalarproduktes sowie die Arcusfunktion eines Winkels dagegen. D.h., Makroskopische Winkel sind nicht als Vektoren darstellbar. Betrachtet man hingegen Punktmassen, und dieses Modell haben wir in diesem Abschnitt zugrunde gelegt, ist diese genauere Betrachtung ohne Belang. Bei mikroskopisch kleinen Winkeln ist die Drehung kommutativ: d3 t d1 t d2 t d2 t d1 t 3 (t ) 1 (t ) 2 (t ) dt dt dt dt dt (11) Winkelgeschwindigkeiten sind als Vektoren schreibbar. Sie charakterisieren den Drehsinn und die Geschwindigkeit der Rotation. Vektoren mit diesen Eigenschaften heißen: „axiale Vektoren“. Die „normalen“ Vektoren heißen „polare“ Vektoren. Exp.: Addieren von Winkelgeschwindigkeiten mit schwarzer Kugel mit grünen Punkten Winkelgeschwindigkeit Modellscheibe V 02 / 1421 Die Bahngeschwindigkeit v ist stets tangential zur Kreisbahn gerichtet und steht senkrecht auf dem aktuellen Radiusvektor. Ihr Betrag ergibt sich aus: ds = r0 d zu Bahngröße Radius x Winkelgröße Das ist eine sehr pauschale Aussage und gilt eher als „Eselsbrücke“ v = ds dt = r0 d = dt r0 (12) = axial (13) Die Bahngeschwindigkeit v steht r . Mit Hilfe des Vektorproduktes kann man schreiben: v r polare Vektoren Das Kreuzprodukt zweier polare Vektoren axialer Vektor Das Kreuzprodukt eines polaren und eines axialen Vektors polarer Vektor r r , v v , Ein „normaler“ polarer Vektor ändert bei Koordinateninversion x -x y -y seine Richtung, seine Polarität z -z Ein Vektor c a b , der sich aus dem Kreuzprodukt zweier polarer Vektoren a , b ergibt, ändert bei einer solchen Punktspiegelung sein Vorzeichen nicht, weil beide Faktoren im Produkt ihr Vorzeichen gleichzeitig ändern. Da sich die Bahngeschwindigkeit bei der Kreisbewegung (wenn auch nur der Richtung nach) ständig ändert, ist bereits die gleichförmige Kreisbewegung eine beschleunigte Bewegung. Mathematische Beschreibung der gleichförmigen Kreisbewegung Rechtwinkliges kartesisches KS mit Einheitsvektoren ex , ey (z = 0 ) Damit wird der Ortsvektor: r t ex r0 cos ey r0 sin Gleichförmige Kreisbewegung: d 2 / 2 v 2 f dt t 𝞄: Umlauffrequenz 1 v 2 v Periodendauer Winkelgeschwindigkeit, Kreisfrequenz r t r0 (ex cos t ey sin t ) r0rˆ t r r0 Die zeitliche Differentiation des Richtungsvektors führt zu: dr t drˆ t d r t v t (r0 rˆ t ) r0 dt dt dt d r0 ex cos t ey sin t dt r0 ex sin t ey cos t Betrag Richtung r0 rˆ´ r ´ (14) Der Einheitsvektor rˆ´ , der die Richtung von v angibt, steht senkrecht auf dem Ortsvektor r und senkrecht auf Die Differentiation des Ortsvektors ergibt also unmittelbar sowohl Betrag als auch Richtung des Bahngeschwindigkeitsvektors. Durch nochmalige Differentiation gelangt man in gleicher Weise zur Bahnbeschleunigung: a t dv t 2 r0 ex cos t ey sin t dt Betrag Richtung r0 rˆ`` r 2 (15) 2 da rˆ`` rˆ Die Bahnbeschleunigung ist bei der gleichförmigen Kreisbewegung stets dem Ortsvektor entgegengerichtet, sie zeigt immer auf den Kreismittelpunkt. Es gibt eine reine Radialbeschleunigung = Zentripetalbeschleunigung. 2 Deshalb wird sie mit ar r r v bezeichnet. Vektoriell ist: ar v r (16) Entwicklungssatz der Vektorrechnung für das doppelte Kreuzprodukt: r r r 2 r r = 0, weil r , es bleibt also übrig: ar 2 r Bisher haben wir nur die gleichförmige Kreisbewegung behandelt. Bei der ungleichförmigen Kreisbewegung (z.B. gleichmäßig beschleunigte Kreisbewegung) ändert sich auch der Betrag der Bahngeschwindigkeit v : v Der Beschleunigungsvektor lässt sich in diesem Fall in eine Radial-Komponente ar und eine Tangential-Komponente at zerlegen. Erstere ist für die Richtungsänderung, letztere für die Betragsänderung von v verantwortlich. Die Kreisbewegung auf einen Blick – Zusammenfassung Wie gelangt man von einem Koordinatensystem (KS) in das andere (Transformation)? Kartesische Koordinaten Polar-Koordinaten x0 2 y0 2 x0 r0 cos (t ) r0 y0 r0 sin (t ) (t ) arc tan z0 0 z y t x t 0 t t t rˆ´ ex sin t rˆ´´ ex cos t ar w2 r at ey cos t ey sin t ar r0 w2 rˆ Richtungsänderung von v Betragsänderung von v Übungsaufgabe: Blatt 2, Aufgabe 4 Vorlesungsversuch V 1 / 2001 Bemerkungen: Zur Veranschaulichung der Zusammenhänge der Größen Ortsvektor, Bahn- und Winkelgeschwindigkeit dienen auch die beiden folgenden geometrischen Überlegungen: 1.) Bei der gleichförmigen Kreisbewegung gilt / v / const. Folglich ist auch / v / 2 const . Vektoriell ist auch das Skalarprodukt v 2 const. Differenziert man den letzten Ausdruck, d dv / v / 2 2v 2v a 0 . Demzufolge müssen die beiden Vektoren dt dt senkrecht aufeinander stehen, es gilt v a . Da der Geschwindigkeitsvektor andererseits ergibt sich: senkrecht auf dem Radiusvektor steht, kann folglich die Beschleunigung nur radial nach innen oder außen zeigen. Sie zeigt nach innen, weil die Punktmasse ansonsten wegfliegen würde. 2.) Aus dem vektoriellen Zusammenhang v r (Gl. (13)) folgt bei zeitlicher Ableitung mit Hilfe der Produktregel: d v r r a . Bei der gleichförmigen Kreisbewegung ist dt die Winkelgeschwindigkeit konstant, die zeitliche Ableitung verschwindet und damit der erste Summand. Im zweiten Summanden kann für die Zeitableitung des Ortsvektors der Geschwindigkeitsvektor eingesetzt werden, der wiederum durch Gleichung (13) definiert ist. Also ergibt sich: a ( r ) . Nach dem Zerlegungssatz für doppelte Kreuzprodukte 2 (siehe Gl. (16)) bleibt nur der Term a r übrig. Also gilt a r .