P-11 - Kreisbewegun..
Werbung

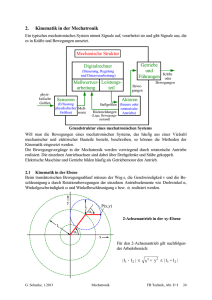
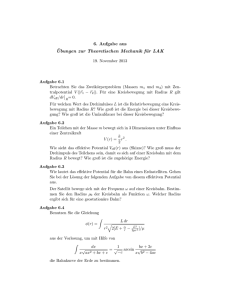
6.3 Die Kreisbewegung 6.3.1 Kreisbewegung mit konstanter Winkelgeschwindigkeit Bei einer Kreisbewegung bewegt sich ein Körper auf einer Kreislinie. Da es sich um eine 2-dimensionale Bewegung handelt, werden zur Beschreibung der Bahn zwei Koordinaten benötigt. Fasst man diese beiden Koordinaten zusammen, so erhält man den x(t) Ortsvektor r ( t ) = y( t ) des Körpers. Die beiden Komponenten x=x(t) und y=y(t) sind Funktionen der Zeit t, deshalb ist auch der Ortsvektor r = r ( t ) eine Funktion der Zeit. Als Koordinatenursprung wählt man zweckmäßigerweise den Mittelpunkt M des Kreises mit dem Radius r. Zum Zeitpunkt t=0 befinde sich der Körper auf der positiven x-Achse. Bezeichnungen und Definitionen - Drehwinkel ϕ = Winkel um den sich der Ortsvektor r im Zeitintervall t dreht. y P2 Der Drehwinkel wird üblicherweise gegen den Uhrzeigersinn gemessen, ϕ = 0 entspricht der positiven x-Achse. r (t 2 ) ϕ Bewegt sich ein Körper im Zeitintervall t=t2-t1 vom Punkt P1 zum Punkt P2, so legt er auf der Kreislinie den Weg s (= Länge des Kreisbogens von P1 nach P2) zurück. Dabei hat sich der Drehwinkel um ϕ von ϕ1 auf ϕ2 erhöht. M s ϕ2 ϕ1 P1 r ( t1 ) x Zwischen Bogenlänge und Drehwinkel besteht die Beziehung ∆s = π⋅r ⋅ ∆ϕ , wobei 180° ϕ in Grad angegeben wird. Gibt man dagegen ϕ im Bogenmaß an, so gilt: ∆s = r ⋅ ∆ϕ Im Allgemeinen wird ϕ im Bogenmaß angegeben. - Winkelgeschwindigkeit ω = die Änderung des Drehwinkels ∆ϕ 1 rad rad somit gilt: ω = Einheit [ω] = =1 ∆t 1s s ϕ im Zeitintervall t Hinweis: Wir betrachten nur Kreisbewegungen mit konstanter Winkelgeschwindigkeit. - Umlaufdauer T = Zeit für eine volle Umdrehung, d. h. für 2π 2π bzw. T = somit gilt: ω = T ω ϕ = 2π . - Frequenz f = Anzahl der Umdrehungen k in der Zeit t, k 1 somit gilt: f = Einheit [f ] = =1 Hz = 1 Hertz t 1s Speziell für k=1 folgt: t = T mit ω = f= 1 T bzw. T = 1 f ω 2π 1 = 2π ⋅ folgt: ω = 2π ⋅ f bzw. f = 2π T T zus. gestellt von OStR Rainer Martin, Ehrenbürg-Gymnasium Forchheim, 21.01.2007, Seite 1 von 3 6.3 Die Kreisbewegung - Bahngeschwindigkeit v = Geschwindigkeit des Körpers auf der Kreisbahn ∆s r ⋅ ∆ϕ ∆ϕ = =r⋅ = r ⋅ ω , also v = r ⋅ ω Es gilt: v = ∆t ∆t ∆t Hinweis: Die Bahngeschwindigkeit ist die Geschwindigkeit, die der Körper zu einem bestimmten Zeitpunkt besitzt. Wenn ω konstant ist, dann ist auch die Bahngeschwindigkeit vom Betrag her zu jedem Zeitpunkt konstant. Dann gilt v ~ r. Beispiel: Eine veraltete Langspielplatte, kurz LP, hatte einen Durchmesser von 30cm drehte sich einst mit 33 13 Umdrehungen pro Minute. Berechne f, T, ω, v am Plattenrand sowie den Drehwinkel nach 3min bzw. nach 45min. Lösungen: f=0,56Hz; T=1,8s; ω=3,5rad/s; v=0,52m/s; ϕ(3min)=630rad=36100°(=100Umdr.); ϕ(45min)=5,4⋅105 ° 6.3.2 Die Bewegungsgleichungen bei der Kreisbewegung Allgemein gilt: Die Ableitung der Ortsfunktion r(t) ist gleich der Geschwindigkeitsfunktion v(t), also v( t ) = r ( t ) . Die Ableitung der Geschwindigkeitsfunktion v(t) ist gleich der Beschleunigungsfunktion a(t), also a ( t ) = v( t ) . Diese Beziehungen gelten auch bei mehrdimensionalen Bewegungen bei denen das Superpositionsprinzip gilt, also auch bei der Kreisbewegung. x (t ) Aus dem Ortsvektor r ( t ) = folgen somit der y( t ) der Geschwindigkeitsvektor v( t ) = r ( t ) = v (t ) x (t ) = x und v y (t) y( t ) der Beschleunigungsvektor a ( t ) = v( t ) = v x (t ) a (t ) = x v y (t) a y (t) Herleitung des Ortsvektors Die Länge des Ortsvektors ist zu jedem Zeitpunkt gleich dem Radius r, also konstant. y Kurz: r ( t ) = r . Es sei ϕ(0) = 0. Dann gilt für die beiden Komponenten des Ortsvektors: x(t) = r⋅cosϕ = r⋅cosωt y(t) = r⋅sinϕ = r⋅sinωt y(t) er(t) ϕ x(t) r (t ) = = r ⋅ cos ωt = r ⋅ cos ωt = r ⋅ e r ( t ) r ⋅ sin ωt sin ωt y( t ) cos ωt Der Vektor e r ( t ) = sin ωt M r(t) x(t) x hat die Länge 1 und zeigt zu jedem Zeitpunkt t in die Richtung des Ortsvektors. Er heißt deshalb Einheitsvektor in r -Richtung. Damit gilt für den Ortsvektor: r ( t ) = r ⋅ e r ( t ) zus. gestellt von OStR Rainer Martin, Ehrenbürg-Gymnasium Forchheim, 21.01.2007, Seite 2 von 3 6.3 Die Kreisbewegung Herleitung des Geschwindigkeitsvektors Die beiden Komponenten vx und vy des Geschwindigkeitsvektors erhält man dadurch, dass man die x- und yKomponente des Ortsvektors einzeln ableitet. Es gilt also: y • v x ( t ) = x ( t ) = (r ⋅ cos ωt ) = r ⋅ (− sin ωt ) ⋅ ω • v(t) v y ( t ) = y( t ) = (r ⋅ sin ωt ) = r ⋅ cos ωt ⋅ ω v( t ) = rω ⋅ − sin ωt = rω ⋅ e t ( t ) cos ωt etr(t) Entsprechend zu e r ( t ) hat auch der Vektor e t ( t ) die Länge 1, ist also ebenfalls ein Einheitsvektor. e t ( t ) zeigt z jedem Zeitpunkt t in die Richtung des Geschwindigkeitsvektors. er(t) r(t) M x Er heißt deshalb Einheitsvektor in v -Richtung. Man erkennt, dass e t ( t ) auf e r ( t ) senkrecht steht. Folgerung: Der Geschwindigkeitsvektor ist stets tangential zum Ortsvektor. Damit gilt für den Geschwindigkeitsvektor: v( t ) = rω ⋅ e t ( t ) Beachte: Der Geschwindigkeitsvektor ändert ständig seine Richtung, hat aber den konstanten Betrag v = v = rω . D. h. der Betrag des Geschwindigkeitsvektors ist gleich der Bahngeschwindigkeit v. Herleitung des Beschleunigungsvektors Zur Erinnerung: Eine beschleunigte Bewegung liegt vor, wenn sich die Geschwindigkeit des Körpers ändert. Bei der Kreisbewegung ist zwar der Betrag der Geschwindigkeit zeitlich konstant, jedoch ändert sich ständig die Richtung des Geschwindigkeitsvektors. Damit ändert sich die Geschwindigkeit des Körpers und deshalb gilt: Die Kreisbewegung ist eine beschleunigte Bewegung. Die beiden Komponenten ax und ay des Beschleunigungsvektors erhält man analog durch Ableiten der beiden Geschwindigkeitskomponenten. 2 Es folgt für den Beschleunigungsvektor: a ( t ) = − rω ⋅ e r ( t ) Man erkennt: 1. Die Richtung des Beschleunigungsvektors zeigt stets entgegengesetzt zum Ortsvektor, ist also zum Kreismittelpunkt M hin gerichtet (= zentripetal). Die Beschleunigung wird deshalb als Zentripetalbeschleunigung bezeichnet. 2 2. Der Betrag des Beschleunigungsvektors ist zeitlich konstant, nämlich: a = a ( t ) = rω . 3. Mit v = rω folgt: a = v2 . r zus. gestellt von OStR Rainer Martin, Ehrenbürg-Gymnasium Forchheim, 21.01.2007, Seite 3 von 3