Formelsammlung GET 2
Werbung

Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung GET 2
Dr. Oliver Haas
18. April 2016
Inhaltsverzeichnis
1 Formelzeichen und Einheiten
3
2 Zehnerpotenzen und Vorsatzzeichen
3
3 Magnetisches Feld
3.1 Permeabilität . . . . . . . . . . . . . .
3.2 Kraft auf Strom durchflossene Leiter .
3.3 Lorentz-Kraft . . . . . . . . . . . . . .
3.4 Das Gesetz von Biot-Savart . . . . . .
3.5 Magnetische Flussdichte . . . . . . . .
3.6 Magnetische Feldstärke, Durchflutung
3.7 Magnetischer Fluss . . . . . . . . . . .
3.8 Magnetischer Kreis . . . . . . . . . . .
3.9 Induktivität . . . . . . . . . . . . . .
3.10 Magnetische Energie . . . . . . . . . .
3.11 Induktionsgesetz . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
4
4
4
4
4
5
5
6
6
6
7
7
.
.
.
.
.
.
.
.
.
.
7
7
8
8
9
9
9
10
10
10
10
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Wechselstromrechnung
4.1 Zeitabhängige Funktionen . . . . . . . . . . . . . . . . . . . . .
4.2 Methode der komplexen Amplituden . . . . . . . . . . . . . . .
4.3 Kirchhoffsche Gesetze für komplexe Ströme und Spannungen .
4.4 Ohmsches Gesetz im Wechselstromkreis . . . . . . . . . . . . .
4.5 Reihen- und Parallelschaltung . . . . . . . . . . . . . . . . . . .
4.6 Impedanz, Admittanz von Widerstand, Kondensator und Spule
4.7 Resonanzfrequenzen . . . . . . . . . . . . . . . . . . . . . . . .
4.8 Grenzfrequenz . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.9 Leistungen im Wechselstromkreis . . . . . . . . . . . . . . . . .
4.10 Ortskurven . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung Grundlagen der Elektrotechnik II
5 Mathematische Ergänzungen
5.1 Rechenregeln für komplexe Rechnungen
5.2 Sinus- und Cosinus-Funktionen . . . . .
5.3 Alternative Winkel-Berechnung . . . . .
5.4 Kreuzprodukt . . . . . . . . . . . . . .
18. April 2016
.
.
.
.
.
.
.
.
Seite 2 von 14
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
12
12
12
13
14
Dr.-Ing. Oliver Haas
Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung Grundlagen der Elektrotechnik II
1
Formelzeichen und Einheiten
Größe
Formelzeichen
Basis-Größen
l
m
t
I, i
T
Länge
Masse
Zeit
Stromstärke
Temperatur
Kraft
Leistung
Arbeit, Energie
el. Ladung
el. Spannung
el. Widerstand
el. Leitwert
Kapazität
Magn. Fluss
Magn. Flussdichte
Induktivität
2
F
P
W
Q
U, u
R
G
C
Φ
B
L
Einheitenname
des SI-Systems
Meter
Kilogramm
Sekunde
Ampere
Kelvin
Abgeleitete Größen
Newton
Watt
Joule
Coulomb
Volt
Ohm
Siemens
Farad
Weber
Tesla
Henry
Einheitenkürzel
m
kg
s
A
K
N bzw. VAs m−1
W bzw. VA
J bzw. Ws
C bzw. As
V
Ω bzw. V A−1
S bzw. A V−1
F bzw. As V−1
Wb bzw. Vs
T bzw. Vs m−2
H bzw. Vs A−1
Zehnerpotenzen und Vorsatzzeichen
Zehnerpotenz
1024
1021
1018
1015
1012
109
106
103
102
101
18. April 2016
Name
Yotta
Zetta
Exa
Peta
Tera
Giga
Mega
Kilo
Hekto
Deka
Vorsatzzeichen
Y
Z
E
P
T
G
M
k
h
da
Zehnerpotenz
10−1
10−2
10−3
10−6
10−9
10−12
10−15
10−18
10−21
10−24
Seite 3 von 14
Name
Dezi
Centi
Milli
Mikro
Nano
Piko
Femto
Atto
Zepto
Yocto
Vorsatzzeichen
d
c
m
µ
n
p
f
a
z
y
Dr.-Ing. Oliver Haas
Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung Grundlagen der Elektrotechnik II
3
Magnetisches Feld
3.1
Permeabilität
µ0 = 4π · 10−7
µ = µ0 · µr ,
Vs
Am
(1)
µ0 : magnetische Feldkonstante, µr : relative Permeabilität.
3.2
Kraft auf Strom durchflossene Leiter
Für die Kraft zwischen zwei mit Strom durchflossenen Leitern gilt
F =
µ I1 I2 l
,
2π%
vektoriell über magnetische Flussdichte
~ k)
F~j,k = Ij ~l × B(I
(2)
F~j,k : Kraftwirkung auf Leiter j, die vom Magnetfeld des Leiters k ausgeübt wird.
Vorzeichen der vektoriellen Länge ~l hängt von der Stromrichtung in Leiter j ab und die
~ wird durch die Stromrichtung in Leiter k vorgegeben.
Richtung von B
3.3
Lorentz-Kraft
Für die Kraft auf eine Ladung Q, die sich mit der Geschwindigkeit ~v durch ein Magnetfeld
bewegt, gilt
~ .
F~m = Q (~v × B)
3.4
(3)
Das Gesetz von Biot-Savart
Die Grundgleichung des Gesetzes von Biot-Savart lautet:
magnetische Feldstärke
magnetische Flussdichte
Z
d~s × ~r 0
~ = I
H
4π L
r2
Z
d~s × ~r 0
~ = µI
B
4π L
r2
(4)
Z
d~s × ~r
~ = I
H
4π L r3
Z
d~s × ~r
~ = µI
B
4π L r3
(5)
~ −R
~ 0 , mit
wobei der Abstandsvektor ~r definiert wird durch ~r = R
~
R:
Ortsvektor, der auf den Aufpunkt zeigt (Am Aufpunkt wird H bzw. B ermittelt)
0
~
R : Ortsvektor des Quellpunktes (Position des Linienelements während der Integration)
d~s: vektorielles Linienelement in Richtung des Stromes I
18. April 2016
Seite 4 von 14
Dr.-Ing. Oliver Haas
Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung Grundlagen der Elektrotechnik II
3.5
Magnetische Flussdichte
Feldbeschreibung der magnetischen Flussdichte in Zylinder-Koordinaten(%, ϕ, z)
Magnetfeld bildet konzentrischen Kreis um den Leiter mit Radius %. Die magnetische Fluss~ zeigt je nach Stromrichtung in bzw. gegen die Richtung des Einheitsvektors ~eϕ
dichte B
~ = ±Bϕ ~eϕ = ± µI ~eϕ .
B
2π%
(6)
Feldbeschreibung der magnetischen Flussdichte in kartesischen Koordinaten
µI −(y − y0 )~ex + (x − x0 )~ey
~
B(x,
y) = ±
2π (x − x0 )2 + (y − y0 )2
(7)
(x0 ; y0 ): Leitermittelpunkt, (x; y): Ort an dem das Feld berechnet wird.
J
N
Wahl des Vorzeichens erfolgt abhängig von der Stromrichtung:
:+
:−
Überlagerung magnetischer Felder durch vektorielle Addition
~ ges = B
~1 + B
~ 2 + ... + B
~n .
B
3.6
(8)
Magnetische Feldstärke, Durchflutung
Materialgleichung
~ = µH
~ ,
B
(9)
Magnetische Feldstärke eines geraden, zylinderförmigen, mit Strom durchflossenen Leiters
(idealisiert)
außerhalb: Ha (%) =
%: Radius der Feldlinie,
I
2π%
innerhalb: Hi (%) =
r: Radius des Leiterquerschnitts,
I%
2πr2
(10)
I: Stromstärke.
Durchflutungssatz
I
L
~ · d~s =
H
Z
~=Θ .
J~ · dA
(11)
A
Elektrische Durchflutung
N Windungen: Θ = N I
allg. für N Leiter: Θ =
N
X
Ik .
(12)
k=1
18. April 2016
Seite 5 von 14
Dr.-Ing. Oliver Haas
Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung Grundlagen der Elektrotechnik II
3.7
Magnetischer Fluss
Φ=
Z
~ · dA
~ ,
B
Quellenfreiheit:
I
A
~ · dA
~ = 0,
B
(13)
A
~ magnetische Flussdichte, dA:
~ Vektorielles Flächenelement.
Φ: magn. Fluss, B:
3.8
Magnetischer Kreis
Unter der Voraussetzung, dass das magn. Feld abschnittsweise konstant und homogen ist,
gelten die folgenden Beziehungen
Magn. Fluss
el. Durchflutung
Φ = BA,
X
Θ=
magn. Spannung
Vm = H lm
Hk lm,k
(14)
k
Magn. Widerstand
lm
,
Rm =
µA
lm : Feldlinienlänge,
magn. Leitwert
µA
Λ=
lm
µ: Permeabilität,
Λ=
1
Rm
(15)
A: Fläche.
Ohmsches Gesetz des magnetischen Kreises (Hopkinsches Gesetz)
Vm = Φ Rm ,
Vm : Magn. Spannung,
Rm1 F
1
N1I1
F2
F3
Rm3
Φ = Vm Λ .
Φ: magn. Fluss,
Rm : magn. Widerstand.
Rm2
R1
U01
N2I2
ESB eines magn. Kreises mit Verzweigung
3.9
(16)
I1
I2
I3
R3
R2
U02
Äquivalentes elektrisches Netzwerk
Induktivität
Für zwei Wicklungen i und j gilt
Allgemein
Eigeninduktivität
Gegeninduktivität
Ni Φi,j = ±Li,j Ij
i = j: Li,i = Li ,
i 6= j: Li,j = Lj,i = M.
(17)
Φi,j : Anteil von j in i
(18)
Magn. Fluss durch Wicklung i, i 6= j
Φi = Φi,i ± Φi,j
Φi,i : eigener Anteil von i
N : Windungszahl, Φ: magn. Fluss, I: Stromstärke,
+: positive Kopplung, −: negative Kopplung.
18. April 2016
Seite 6 von 14
Dr.-Ing. Oliver Haas
Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung Grundlagen der Elektrotechnik II
3.10
Magnetische Energie
Allgemein wird die magnetische Energie berechnet über
wm =
Z Be
~ · dB
~
H
0
und Wm =
Z V
0
wm dV .
(19)
wobei wm die magnetische Energiedichte und Wm die magnetische Energie ist. Für den Fall
eines homogenen Feldes im betrachteten Volumen V und µ = konst. gilt auch
wm =
1 2
B ,
2µ e
wm =
µ 2
H ,
2 e
wm =
1
He Be ,
2
Wm = V w m .
(20)
Energie für eine einfache Spule mit konstanter Eigeninduktivität L
Wm =
1
L I2 ,
2
Wm =
1
NΦ I .
2
(21)
N : Windungszahl, Φ: magn. Fluss, I: Stromstärke.
3.11
Induktionsgesetz
Lenzsche Regel: Die Induktionswirkung ist ihrer Ursache entgegengerichtet.
u(t) = −N
u: induzierte el. Spannung,
4
4.1
N : Windungszahl,
dΦ
.
dt
(22)
Φ: magn. Fluss .
Wechselstromrechnung
Zeitabhängige Funktionen
Periodische Funktionen sind allgemein definiert durch
f (t) = f (t + k T ) ,
mit der Periodendauer T und k ∈ Z .
(23)
Definition der Kreisfrequenz ω bei sinusförmigen Funktionen
ω=
2π
,
T
ω = 2πf ,
f=
1
.
T
(24)
Beispiel: allgemeine Beschreibung einer Sinusfunktion mit Amplitude â, Kreisfrequenz ω und
Nullphasenwinkel ϕ0
a(t) = â sin(ωt + ϕ0 ) .
18. April 2016
Seite 7 von 14
(25)
Dr.-Ing. Oliver Haas
Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung Grundlagen der Elektrotechnik II
Mittelwertbildung bei periodischen Funktionen
Integration über die Zeit t:
Arithmetischer Mittelwert
Gleichrichtwert
Effektivwert
1ZT
f=
f (t) dt
T t=0
1ZT
|f | =
|f (t)| dt
T t=0
s
F =
1ZT 2
f (t) dt
T t=0
(26)
1 Z 2π 2
f (ωt)dωt
2π ωt=0
(27)
Integration über den Winkel ωt (Substitution t 7→ ωt)
1 Z 2π
f=
f (ωt)dωt
2π ωt=0
4.2
s
1 Z 2π
|f | =
|f (ωt)| dωt
2π ωt=0
F =
Methode der komplexen Amplituden
Methode zur Transformation sinusförmiger Funktionen in den komplexen Frequenzbereich.
1. Transformation vom reellen Zeitbereich in den komplexen Zeitbereich durch die Abbildungsvorschrift
a(t) = â cos(ωt + ϕa ) 7→ a(t) = â e j(ωt+ϕa ) ,
2. Transformation vom komplexen Zeitbereich in den komplexen, zeitunabhängigen Frequenzbereich durch Multiplikation mit e − j ωt
a(t) = â e j(ωt+ϕa ) 7→ â = â e j(ϕa ) ,
3. Berechnung des Netzwerks mit komplexen Größen unter Verwendung der komplexen
Amplituden,
4. Rücktransformation vom komplexen, zeitunabhängigen Frequenzbereich in den komplexen Zeitbereich durch Multiplikation mit e j ωt
b̂ = b̂ e j(ωt+ϕb ) 7→ b̂(t) = b̂ e j(ϕb ) ,
5. Rücktransformation vom komplexen, zeitabhängigen Frequenzbereich in den reellen
Zeitbereich durch die Abbildungsvorschrift
b(t) = b̂ e j(ωt+ϕb ) 7→ b(t) = <{b(t)} = b̂ cos(ωt + ϕb ) .
Alternativ werden bei der Berechnung in Schritt
√ 3 statt der komplexen Amplituden auch die
komplexen Effektivwerte verwendet: A = â/ 2.
4.3
Kirchhoffsche Gesetze für komplexe Ströme und Spannungen
Die Summe aller Ströme in einem einzelnen
Knoten ist 0:
n
X
ı̂k = 0 ,
k=1
18. April 2016
bzw.
n
X
k=1
Ik = 0 .
(28)
Die Summe aller Spannungen entlang eines
geschlossenen Umlaufs ist 0:
n
X
k=1
Seite 8 von 14
ûk = 0 ,
bzw.
n
X
Uk = 0 .
(29)
k=1
Dr.-Ing. Oliver Haas
Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung Grundlagen der Elektrotechnik II
4.4
Ohmsches Gesetz im Wechselstromkreis
Analog zum Gleichstromkreis gilt
Z=
u
û
û · e jϕU
û
= =
= · e j(ϕU −ϕI )
jϕ
i
ı̂
ı̂ · e I
ı̂
⇒
ϕZ = ϕU − ϕI
(30)
mit der komplexen Impedanz Z und ihrem Kehrwert, der komplexen Admittanz Y .
Gleiches gilt für die komplexen Effektivwerte
Z=
4.5
U
U · e jϕU
U
=
= · e j(ϕU −ϕI ) .
jϕ
I
I
I ·e
I
(31)
Reihen- und Parallelschaltung
Reihenschaltung komplexer Impedanzen und Admittanzen
Z=
X
Zk ,
k
X 1
1
.
=
Y
Y
k
k
(32)
Parallelschaltung komplexer Impedanzen und Admittanzen
Y =
X
Yk,
k
4.6
X 1
1
=
.
Z
k Zk
(33)
Impedanz, Admittanz von Widerstand, Kondensator und Spule
Ohmscher Widerstand Kondensator, Kapazität
1
iC ,
j ωC
d
uC
dt
Spule, Induktivität
uR = R · iR
uC =
Z R = RR + j XR = R
Z C = R C + j XC =
RR = R
RC = 0
XR = 0
XC = −
Y R = GR + j BR = G
Y C = GC + j BC = j ωC
Y L = GL + j BL =
GR = G
GC = 0
GL = 0
BR = 0
BC = ωC
BL = −
R=
1
G
18. April 2016
XC = −
iC = C
1
j ωC
uL = j ωL iL ,
uL = L
d
iL
dt
Z L = RL + j XL = j ωL
RL = 0
1
ωC
1
BC
Seite 9 von 14
XL = ωL
1
j ωL
1
ωL
1
XL = −
BL
Dr.-Ing. Oliver Haas
Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung Grundlagen der Elektrotechnik II
4.7
Resonanzfrequenzen
4.7.1
Phasenresonanz
Bei Phasenresonanz verschwindet der Imaginärteil einer komplexen Funktion (hier am Beispiel der Impedanz Z), d. h. es gilt
={Z(ω0 )} = 0 sowie ϕZ (ω0 ) = 0 .
4.7.2
(34)
Betragsresonanz
Bei der Betrags- oder Amplitudenresonanz nimmt der Betrag einer komplexen Funktion (hier
am Beispiel der Impedanz Z) einen Extremwert (Minimum oder Maximum) an, d. h. es gilt
dZ(ω) = 0.
dω ω=ω0
4.8
(35)
Grenzfrequenz
Die Grenzfrequenz fg oder Grenzkreisfrequenz ωg tritt auf, wenn für die Beträge einer
komplexen Funktion gilt
1
Funktionswert bei ωg
=√
Maximum der Fkt.
2
√
Funktionswert bei ωg
= 2 .
Minimum der Fkt.
bzw.
(36)
Ist der Extremwert rein reell oder rein imaginär gilt außerdem (Bsp.: beim Reihenresonanzkreis ist Zmin = R)
<{Z(ωg )} = |={Z(ωg )}| ,
4.9
π
ϕ(ωg ) = arctan(±1) = ± .
4
(37)
Leistungen im Wechselstromkreis
Kompl. Scheinleistung:
S = U I∗ = P + j Q
S = I2 Z ,
Wirkleistung:
Blindleistung:
P = U I cos(ϕ)
Q = U I sin(ϕ)
P = <{S} = S cos(ϕ)
Q = ={S} = S sin(ϕ)
Einheiten:
[S] = VA ,
[P ] = W ,
Wichtig: Die Leistung der Quellen ist negativ:
4.10
S = U2 Y ∗
(38)
(39)
(40)
[Q] = VAr .
S q = −U 0 I ∗0 .
Ortskurven
Ortskurve = Darstellung der Abhängigkeit einer Funktion von einem Parameter in der komplexen Ebene. Die Ortskurve wird beschrieben durch einen komplexen Zeiger, der vom Ursprung auf einen Punkt in der komplexen Ebene zeigt. Durch Variation der abhängigen
Größe beschreibt dieser Zeiger eine Kurve in der komplexen Ebene.
18. April 2016
Seite 10 von 14
Dr.-Ing. Oliver Haas
Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung Grundlagen der Elektrotechnik II
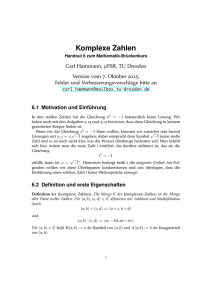
Beispiele
(a) Die Impedanz eines Reihenschwingkreises abhängig von der Kreisfrequenz ω:
Z(ω) = R + j ωL −
1
ωC
0 ≤ ω < ∞.
,
(b) Die Impedanz eines Reihenschwingkreises abhängig von der Induktivität L:
1
Z(L) = R + j ω1 L −
ω1 C
w®¥
j Im
Z (w)
j
0
0 ≤ L ≤ L0 .
,
j Im
Z
L=L0
Z (L)
R
L
j
w=w0
R
0
Re
Z
Re
L=0
w
w=0
Ortskurve zu Beispiel a
Ortskurve zu Beispiel b
Ortskurven-Inversion
Regeln für die Inversion am Beispiel der Impedanz Z und der Admittanz Y :
Z=
1
1
= · e − j ϕY
Y
Y
⇒
1
,
Y
Z=
ϕZ = −ϕY .
(41)
Hieraus folgt für die Extremwerte
max(Z) 7→ min(Y )
und analog
min(Z) 7→ max(Y ) .
(42)
Die Inversion ist winkeltreu, nur das Vorzeichen ändert sich! Hieraus lassen sich die folgenden
Regeln ableiten
• Geraden, die nicht durch den Ursprung gehen, werden zu Kreisen, die durch den Ursprung gehen;
• Geraden, die durch den Ursprung gehen, bleiben Geraden;
• Kreise, die durch den Ursprung gehen, werden zu Geraden;
• Kreise, die nicht durch den Ursprung gehen, bleiben Kreise.
18. April 2016
Seite 11 von 14
Dr.-Ing. Oliver Haas
Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung Grundlagen der Elektrotechnik II
5
5.1
Mathematische Ergänzungen
Rechenregeln für komplexe Rechnungen
Definition: es sei Z eine beliebige komplexe Zahl und Z ∗ ihre Konjugiertkomplexe mit
und Z ∗ = R − j X = Z · e − j ϕZ
Z = R + j X = Z · e j ϕZ
(43)
dann gilt
Z + Z ∗ = 2<{Z} = 2R ,
Z − Z ∗ = j 2={Z} = j 2X ,
Z · Z∗ = Z2 .
Für den Betrag und den Phasenwinkel gilt
√
={Z}
X
|Z| = Z = R2 + X 2 , ϕZ = arctan
= arctan
.
<{Z}
R
(44)
(45)
Multiplikation und Division zweier komplexer Zahlen Z 1 und Z 2
Z 1 Z 2 = Z1 Z2 · e
j(ϕ1 +ϕ2 )
q
(R12 + X12 )(R22 + X22 ) · e j(ϕ1 +ϕ2 ) ,
=
= (R1 + j X1 )(R2 + j X2 ) = R1 R2 − X1 X2 + j(R1 X2 + R2 X1 ) ,
(46)
(47)
q
R12 + X12 j(ϕ1 −ϕ2 )
Z1 j(ϕ1 −ϕ2 )
Z1
=
·e
=q
·e
,
Z2
Z2
R22 + X22
=
5.2
(48)
R1 R2 + X1 X2 + j(R2 X1 − R1 X2 )
(R1 + j X1 )
=
.
(R2 + j X2 )
R22 + X22
(49)
Sinus- und Cosinus-Funktionen
Wichtige Funktionswerte
α
α (rad)
sin α
cos α
0◦
0
0
1
30◦
1
2
√
1
2
2
√
1
3
2
√
1
( 2
4
1
3
2
√
1
2
2
1
2
√
1
(− 2
4
1
0
150◦
π
6
π
4
π
3
5π
12
π
2
7π
12
2π
3
3π
4
5π
6
1
2
1
( 2−
4
− 12
√
− 12 2
√
− 12 3
180◦
π
0
−1
270◦
3π
2
−1
0
45◦
60◦
75◦
90◦
105◦
120◦
135◦
18. April 2016
+
√
6)
√
√
1
( 2 + 6)
4
√
1
3
2
√
1
2
2
Seite 12 von 14
√
√
+
√
√
6)
6)
Dr.-Ing. Oliver Haas
Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung Grundlagen der Elektrotechnik II
Symmetrien
sin(−x) = − sin x = sin(x + π)
cos(−x) = cos x
(50)
(51)
Gegenseitiger Zusammenhang
π
sin(x) = cos
−x
2
sin2 x + cos2 x = 1 ,
sin2 x =
π
cos(x) = sin
+x .
2
und
1
1 − cos 2x ,
2
cos2 x =
(52)
1
1 + cos 2x .
2
√
+ 1 − cos2 x
für 0 < x < π
√
− 1 − cos2 x für π < x < 2π
√
+ 1 − sin2 x für 0 < x < π ∩
2
cos x =
√
− 1 − sin2 x für π < x < 3π
2
2
sin x =
(53)
3π
2
< x < 2π
(54)
Ableitungen
sin0 x = cos x
cos0 x = − sin x
(55)
(56)
sin(x ± y) = sin(x) cos(y) ± cos(x) sin(y)
(57)
cos(x ± y) = cos(x) cos(y) ∓ sin(x) sin(y)
(58)
x±y
x∓y
· cos
2 2 x+y
x−y
= 2 cos
· cos
2
2
x+y
x−y
= −2 sin
· sin
2
2
i
1h
=
cos(x − y) − cos(x + y)
2
i
1h
=
cos(x − y) + cos(x + y)
2
i
1h
=
sin(x − y) + sin(x + y)
2
sin x ± sin y = 2 sin
cos x + cos y
cos x − cos y
sin x · sin y
cos x · cos y
sin x · cos y
5.3
(59)
(60)
(61)
(62)
(63)
(64)
Alternative Winkel-Berechnung
Z = |Z| · e
18. April 2016
jϕ
={Z}
ϕ = 2 arctan
,
<{Z} + |Z|
,
Seite 13 von 14
−π < ϕ < π
(65)
Dr.-Ing. Oliver Haas
Fahrzeugsysteme und
Grundlagen der Elektrotechnik
Prof. Dr. rer. nat. L. Brabetz
Formelsammlung Grundlagen der Elektrotechnik II
5.4
Kreuzprodukt
Die formale Berechnung des Kreuzproduktes erfolgt über eine Determinante (Beispiel für
kartesische Koordinaten)
~v1 × ~v2 =
~
ex
e
~
y
~
ez
x1 x2 y1 y2 = ~ex (y1 z2 − z1 y2 ) − ~ey (x1 z2 − z1 x2 ) + ~ez (x1 y2 − y1 x2 )
z1 z2 = (y1 z2 − z1 y2 )~ex + (z1 x2 − x1 z2 )~ey + (x1 y2 − y1 x2 )~ez .
(66)
Fläche zwischen den beiden Vektoren, Richtung der zugehörigen Flächennormalen
|~v1 × ~v2 | = A ,
~n =
~v1 × ~v2
.
A
(67)
Rechtsschrauben-Regel
Drehung nach rechts: Schraube bewegt sich nach unten, Drehung nach links: Schraube bewegt
sich nach oben.
v1
v2
An
v2
An
v1
A n = v1 ´ v2
v1 ´ v2
Wichtige Rechenregeln
~v × ~0 = ~0
~v × ~v = ~0
(68)
(69)
(70)
(71)
~v1 × ~v2 = −~v2 × ~v1
~v1 × (~v2 + ~v3 ) = (~v1 × ~v2 ) + (~v1 × ~v3 )
Anwendung: Koordinatensysteme
Definition der rechtshändigen Koordinatensysteme über das Kreuzprodukt der Einheitsvektoren
ez
Kreuzprodukte
in Pfeilrichtung: +
kartesisch: x, y, z ⇒ ~ex , ~ey , ~ez
ey
ex
Bsp.: ~ez × ~ex = ~ey
~ex × ~ey = ~ez
(72)
ez
Zylinder: %, ϕ, z
⇒ ~e% , ~eϕ , ~ez
~e% × ~eϕ = ~ez
(73)
er
ej
Bsp.: ~eϕ × ~ez = ~e%
eJ
Bsp.: ~eϑ × ~eϕ = ~er
ej
Kugel: r, ϑ, ϕ ⇒ ~er , ~eϑ , ~eϕ
~er × ~eϑ = ~eϕ
18. April 2016
(74)
Seite 14 von 14
er
Dr.-Ing. Oliver Haas