6. Vektor- und Koordinaten
Werbung

6. Vektor- und Koordinaten-Geometrie.
Jeder endlichen Menge, etwa der Menge
M = {♣, ♦, ♥, ♠ }.
kann man durch
R4 (M ) = { a1 ♣ + a2 ♦ + a3 ♥ + a4 ♠ | ai ∈ R }
die Menge der ”formalen Linearkombinationen” zuordnen. Es stellt sich heraus, dass R4 (M ) nicht nur eine
Menge, sondern in natürlicher Weise ein Vektorraum
ist. Dies ist ein extrem abstrakter Standpunkt an den
man sich erst gewöhnen muss. Aber wir werden in
diesem Kapitel sehen, dass dieser Standpunkt mit der
bekannten Vektorgeometrie zusammenhängt, und wir
werden in den folgenden Kapiteln sehen, dass ein solch
abstrakter Standpunkt sehr nützlich sein kann.
Klaus Johannson, Elementare Mathematik 1
2
I. Elementare Mathematik 1
Raum der Vektor Klassen.
Vektoren sind besser als Punkte, denn mit Vektoren
kann man ”rechnen”. Allerdings erst nach etwas Vorbereitung.
Definition Vektorraum.
Klaus Johannson, Elementare Mathematik 1
§6 Analytische Geometrie
Wir betrachten die Menge P 2
Ebene. Durch die Vorschrift
3
aller Pfeile in der
v ∼ w ⇔ vist parallel zuw
wird eine ”Aquivalenzrelation definiert.
Wir schreiben die Äquivalenzklasse von Vektoren mit
fetten Buchstaben
v := { w ∈ M | w ∼ v }.
Satz.
[v] = [w] ⇔ v ∼ w ⇔ [v] ∩ [w] ∩ ∅.
Beweis. v ∼ v (Reflexivitaet) ⇒ v ∈ [v] ⇒ v ∈
[w] ⇒ v ∼ w.
u ∈ [v] ⇒ u ∼ v ⇒ u ∼ w(T ransitivitaet) ⇒ u ∈
[w]. Also [v] ⊂ [w]. Ebenso [w] ⊂ [v]. ♦
Bemerkung. Der obige Satz besagt, dass man in
jeder Äquivalenzklasse einen Repräsentanten wählen
kann.
Sei nun
V 2 (P ) := P 2 / ∼= { v | v ∈ P 2 }
Klaus Johannson, Elementare Mathematik 1
4
I. Elementare Mathematik 1
die Menge der ”Aquivalenzklassen”.
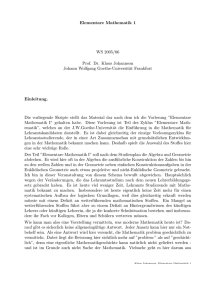
Definition. Seien v, w zwei Vektoren.
Wähle Repräsentanten v ∈ v und w ∈ w so dass
die Anfangspunkte übereinstimmen.
Dann ist die Summe v + w definiert als die Äquivalenzklasse des folgenden Vektors:
b
b
a+b
a+b
a
a
Triangle Gesetz
Parallelogramm Gesetz
Definition. Das Produkt av eines Vektors v mit
einem Skalar a ∈ R ist die Äquivalenzklasse des Vektors w parallel zu v ∈ v mit
|w| = a|v|.
Klaus Johannson, Elementare Mathematik 1
§6 Analytische Geometrie
5
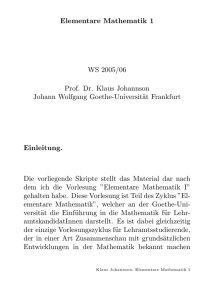
Bemerkung. Man kann nun auch leicht die Differenz
a − b von zwei Vektoren veranschaulichen, denn
a − b = a + (−1) · b.
a-b
b
a
Die Differenz von zwei Vektoren
Rechenregeln. Wenn a, b, c Vektoren und wenn
c, d Skalare sind, dann gelten die folgenden formalen
Gesetze:
1. a + b = b + a
3. a + 0 = a
2. a + (b + c) = (a + b) + c
4. a + (−a) = 0
5. c(a b) = ca + cb
6. (c + d)a = ca + da
7. (cd)a = c(da)
8. 1a = a
Definition. Eine Menge in der diese Rechenregeln
gelten heißt Vektorraum.
Klaus Johannson, Elementare Mathematik 1
6
I. Elementare Mathematik 1
Wahl eines Basispunktes.
Es ist unbequem mit Klassen von Vektoren zu arbeiten. Z. B. ist es unschön geometrische Objekte, wie
Geraden oder Ebenen, mit Hilfe von Äquivalenzklas
sen von Vektoren zu beschreiben.
Hierzu gibt es einen Ausweg.
Der Trick ist, einen Basispunkt zu wählen.
Dies gibt dann die Möglichkeit, in jeder Äquivalenzklasse v einen eindeutigen Repräsentanten zu wählen,
nämlich den Vektor v ∈ v, der im Basispunkt seinen
Anfangspunkt hat.
Wir gehen also von der Menge aller Vektoren auf die
Menge der Ortsvektoren über.
Der Raum der Ortsvektoren
Klaus Johannson, Elementare Mathematik 1
§6 Analytische Geometrie
7
Die oben definierten Summen und Produkte von Vektoren und Skalaren definieren auch Verknüpfungen der
Ortsvektoren.
Satz. (On , +, ·R ) ≃ (P n , +, ·R , wobei On der Raum
der Ortsvektoren und P n der Raum der Klassen von
Vektoren. ♦
Wir bezeichnen die Ortsvektoren mit normal gedruckten Buchstaben, d.h. v ∈ On oder v ∈ V.
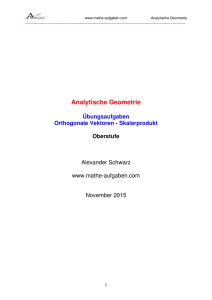
Definition. Seien v, w ∈ On
Dann bezeichnet
zwei Ortsvektoren.
g = { v + tw) | t ⊂ R }
die Gerade durch die Spitze von v in Richtung des
Vektors w.
tw’
v+
tw
v
w
Eine Gerade
Klaus Johannson, Elementare Mathematik 1
8
I. Elementare Mathematik 1
Aufgabe. Benutzen Sie Ortsvektoren um zu zeigen,
dass sich die drei Seitenhalbierenden in jedem Dreieck
in einem Punkt schneiden.
w
v
Seitenhalbierende
Die Seitenhalbierenden sind durch die folgenden Vektoren gegeben:
v + 12 (w − v)
v − 12 w
w − 21 v
Die Geraden die durch die ersten beiden Seitenhalbierende gegeben sind lauten:
s(v + 12 (w − v)) und v + t(v − 21 w)
Klaus Johannson, Elementare Mathematik 1
§6 Analytische Geometrie
9
Um den Schnittpunkt zu finden müssen wir gleichsetzen:
s(v + 12 (w − v)) = v + t(v − 12 w)
s 12 v + s 12 w = (1 + t)v − t 21 w
Also
1
2s
1
2s
=1+t
= − 21 t
und so
s = −t ⇒ −t = 2 + 2t ⇒ t = − 23 .
Demnach lautet der Ortsvektor zum Schnittpunkt
v + 23 (v − 12 ) = 53 v − 13 w
Ebenso rechnet man den Schnittpunkt eines anderen
Paares von Seitenhalbierenden aus. Man muss dann
nur noch sehen, dass beide Schnittpunkte gleich sind.
Klaus Johannson, Elementare Mathematik 1
10
I. Elementare Mathematik 1
Wahl einer Basis.
In jeder Menge von Ortsvektoren kann man immer eine
endliche Menge von Vektoren, die Basis Vektoren,
auswählen, so dass jeder andere Vektor eine Linearkombination der Basisvektoren ist.
Bemerkung. Es stellt sich heraus, dass die Existenz
einer Basis eine Konsequenz der bloßen Rechenregeln
des Vektorraumes ist. Dies ist nicht leicht zu beweisen.
Wir gehen aber hierauf nicht weiter ein.
Wir betrachten hier nur den Vektorraum der Ortsvektoren in der Ebene. Basisvektoren sehen dann so aus:
Basis
Basis
keine Basis
Achtung. Man braucht Basisvektoren, um weitere
Eigenschaften von Vektoren zu definieren. Zum Beispiel um Winkel und Längen für Vektoren zu definieren.
Klaus Johannson, Elementare Mathematik 1
§6 Analytische Geometrie
11
Beispiel. Winkel zwischen Vektoren.
Seien u, v Basisvektoren. Ein Winkel,
chen v, w ist die Wahl einer Zahl
6
(u, v), zwis-
0 ≤ 6 (u, v) ≤ 1
Die Basis u, v heißt orthogonale Basis, wenn man
6
(u, v) =
1
4
als Winkel wählt.
Der Winkel 6 (w, u) eines beliebigen Vektors w =
au + bw zu u ist gegeben durch
6
b
(v, u) := arctan .
a
Der Winkel Zwischen zwei beliebigen Vektoren w1 , w2
ist gegeben durch
6
(w1 , w2 ) = 6 (w1 , u) − 6 (w2 , u).
Beispiel. Länge von Vektoren.
Eine Länge eines Basisvektors ist die Wahl einer Zahl
|u| ∈ R+
Klaus Johannson, Elementare Mathematik 1
12
I. Elementare Mathematik 1
Sei u, v eine othogonale Basis. Dann ist
|w| = |au + bv| =
p
( a|u| )2 + ( b|v| )2
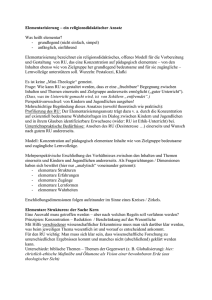
Aufgabe. Man beweise den Satz von Pythagoras mit
Vektor Geometrie.
a+b
b
a
Der Satz von Pythagoras
(a + b)2 = a2 + 2ab + b2 = a2 + b2 ♦
Bemerkung. Von einem wirklichen ”Beweis” kann
man hier eigentlich nicht sprechen. Die Definitionen
sind ja hier gerade so gemacht, dass der Satz von
Pythagoras gilt. Man gibt auch andere Definitionen
(die dann auch zu anderen ”Geometrien” führen
können). Wir gehen aber darauf nicht weiter ein.
Klaus Johannson, Elementare Mathematik 1
§6 Analytische Geometrie
13
Von den Basen zu den Koordinaten.
Es war nun Descartes Idee, dass man einfach durch
mechanisches Rechnen noch viel mehr geometrische
Sätze erhalten kann (ohne sich geometrische Tricks wie
bei Euklid einfallen lassen zu müssen).
Allerdings empfiehlt Descartes nicht nur bloss einen
Basispunkt sondern ein besser ein ganzes ”Koordinatensystem” zu wählen.
Solche Koordinatensysteme kannten schon die Renaissance Maler. Jedenfalls ist es nicht schwer, ihre Gitterschirme in Koordinaten Systeme der Ebene zu verwandeln:
y
2
2
3
( x, y ) = ( 3, 2 )
3
x
Vom Gitterschirm zum Koordinatensystem
Descartes war aber der erste der sie benutzt hat, um
eine mechanische Methode zum Erzeugen von geometrischen Sätzen anzugeben.
Klaus Johannson, Elementare Mathematik 1
14
I. Elementare Mathematik 1
Definition. Eine Basis ist eine minimale Kollektion
v1 , . . . , vn von Ortsvektoren mit der Eigenschaft, dass
sich jeder Ortsvektor v als Linear Kombination
v = a1 v1 + a2 v2 + . . . + an vn
schreiben lässt.
Bemerkung. Die Koeffizienten a1 , a2 , . . . , an heißen
die Koordinaten des Vektors.
Wir wählen eine Basis ein für alle Mal.
Dann ist jeder Ortsvektor v eindeutig durch seine
Koordinaten a1 , a2 , . . . , an gegeben.
Definition. Die Menge
Rn := { [x1 , x2 , . . . , xn ] | xi ∈ R }
zusammen mit den Verknüpfungen
[x1 , x2 , . . . , xn ]+[y1 , y2 , . . . , yn ] :=
[x1 + y1 , x2 + y2 , . . . , xn + yn ]
a[x1 , x2 , . . . , xn ] := [ax1 , ax2 , . . . , axn ]
heißt Koordinatenraum.
Klaus Johannson, Elementare Mathematik 1
§6 Analytische Geometrie
15
Satz. Jeder Koordinatenraum ist ein Vektorraum.
Er ist isomorph zum entsprechenden Raum On der
Ortsvektoren. ♦
Man kann nun auch direkt
ometrische Sätze beweisen.
an wie man die Gleichung
natenraum aufstellen kann.
Schulstoff.
im Koordinatenraum geWir geben hier aber nur
von Geraden im KoordiAlles weitere ist ja heute
Um die Gleichung einer Geraden zu bestimmen
braucht man entweder zwei Punkte oder einen Punkt
und eine Richtung. Ent- sprechend gibt es die Punkt
Richtungs Formoder die Zwei Punkte Form.
(x,y)
(x,y)
(x2 ,y2 )
y - y1
y2 - y1
y-n
n
a
(x1 ,y1 )
x2 - x1
x
x
Punkt-Richtungs-Form
x1
x2
x
Zwei-Punkte-Form
Klaus Johannson, Elementare Mathematik 1
16
I. Elementare Mathematik 1
Man erinnere sich, dass
Gegenkathete
tan(a) =
Ankathete
Danach folgt aus dem linken Diagramm:
y−n
= tan(a) =: m.
x−0
Also
y = mx + n
Dies ist die Punkt-Richtungs-Form der Geraden
Gleichung.
Aus dem rechten Diagramm entnehmen wir:
y − y1
y2 − y1
=
x − x1
x2 − x1
und dies ist die Zwei-Punkte-Form der Geraden
Gleichung.
Sind (a, 0) und (0, b) die Schnittpunkte der Geraden
mit der x-Achse bzw. mit der y-Achse, dann ist nach
der Zwei-Punkte-Form:
b−0
y−b
=
x−0
a−0
Klaus Johannson, Elementare Mathematik 1
§6 Analytische Geometrie
17
und so
ay − ab = bx
also
ay − bx = ab
ist auch eine Form der Geraden Gleichung. Wir halten
fest: Die Gleichung
ax + by = d
ist die allgemeine Form der Geraden Gleichung
in der Ebene. Ebenso zeigt man, dass
ax + by + cz = d
die allgemeine Form der Ebenen Gleichung im
Raum ist. Wenn (x0 , y0 , z0 ) irgendein Punkt ist, der
in der Ebene liegt, dann gilt:
ax + by + cz = ax0 + by0 + cz0
⇒ a(x − x0 ) + b(y − y0 ) + c(z − z0 ) = 0
Dies ist auch eine Form der Ebenen Gleichung.
Klaus Johannson, Elementare Mathematik 1
18
I. Elementare Mathematik 1
Der Raum der Spielkarten.
Nach der Wahl von Basisvektoren kann man jeden
Vektor als Linearkombination von Basisvektoren
schreiben. Dies kann man auch so ausdrücken. In der
Menge der Pfeile (in der Ebene) die in einem Basispunkt P anfangen, kann man zwei Pfeile auswählen,
etwa ↑ und → so dass sich jeder andere Pfeil in
P , etwa ր, schreiben lässt als Linearkombination
a· ↑ +b· →, etwa
ր= 1· ↑ +1· →,
schreiben lässt. Wir sagen der Vektorraum der Pfeile
(in der Ebene) wird durch die endliche Menge {↑, →}
linear erzeugt.
Nun stellt die Menge der Pfeile nichts besonderes dar.
Im Gegenteil, jede endliche Menge M kann man dazu
benutzen, um einen Vektorraum linear zu erzeugen.
Als Beispiel nehme man die Menge
M = {♣, ♦, ♥, ♠ }.
von ”Spielkarten”. Der davon erzeugte Vektorraum ist
dann die Menge
R4 (M ) := { a1 ♣ + a2 ♦ + a3 ♥ + a4 ♠ | ai ∈ R }
Klaus Johannson, Elementare Mathematik 1
§6 Analytische Geometrie
19
der formalen Linearkombinationen, zusammen mit den
formalen Summen und Skalarprodukten gegeben
durch:
+
a1 △
b1 △
+
+
= (a1 + b1 )△ +
a2 ▽
b2 ▽
+
+
(a2 + b2 )▽ +
a3 ♣
b3 ♣
(a3 + b3 )♣
und
α·(a1 △+a2 ▽+a3 ♣) = (α·a1 )△+(α·a2 )▽+(α·a3 )♣)
Beispiel.
(2△ + 3▽ + 0♣) + (1△ − 2▽ + 1♣) = 3△ + 1▽ + 1♣
Bemerkung. Man hat das Gefühl, dass man mit
dieser Konstruktion nichts wirklich neues bekommt.
Dies liegt daran, dass der Koordinatenraum gleich ist
wenn die Erseugendenmengen M die gleiche Anzahl von Elementen haben. Technisch ausgedrückt:
Zwei Vektorräume sind isomorph, wenn ihre Basis gleiche Kardinalität haben. Jede Bijektion f : M →
N zwischen Basismengen lässt sich nämlich durch
Klaus Johannson, Elementare Mathematik 1
20
I. Elementare Mathematik 1
P
P
f ( ai mi ) := ai f (ai ) zu einem Isomorphismus der
Vektorräume fortsetzen.
Literatur.
• R. Descartes, Geometrie,
Wissenschaftliche Buchgesellschaft 1981
• J. Stewart, Calculus, Concepts and Contexts 1997
Klaus Johannson, Elementare Mathematik 1