5.4.4 Elektrische Maschinen
Werbung

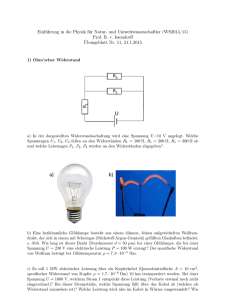
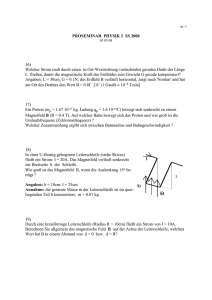
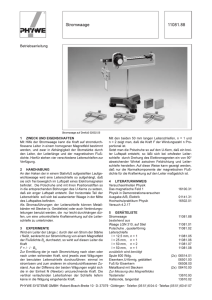
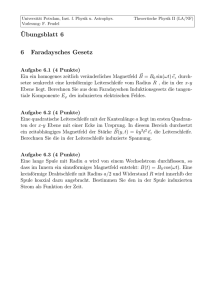
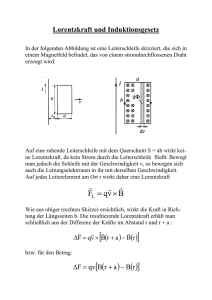
5.4 Wechselstrom 705 positiv (H < 0 und dB < 0) und schließlich die Fläche (D) negativ (H < 0 und dB > 0) zu zählen. Insgesamt ist eine Energie pro Periode zum Ummagnetisieren erforderlich, die proportional zur Fläche ist, die die Hystereseschleife einschließt. Diese Energie wird in Wärme umgewandelt, geht also der Sekundärseite verloren. Die Hystereseverluste betragen somit PH = WH = fV Kern ∫ H ( B )dB . T Hysterese − (5.506) schleife Um die Hystereseverluste klein zu halten, werden Transformatorenkerne aus weichmagnetischen Werkstoffen hergestellt, die eine möglichst kleine Hysterese aufweisen. 5.4.4 Elektrische Maschinen Elektromotoren dienen als Konverter von elektrischer Energie in mechanische Arbeit, Generatoren wandeln dagegen mechanische Arbeit in elektrische Energie um. Beide beruhen darauf, dass bewegte Ladungsträger im Magnetfeld die Lorentzkraft (5.252) erfahren. Ein einfacher Elektromotor ist eine Anordnung wie in Abb. 5.107 (a), dabei soll die Stromzuführung zu dem beweglichen Leiterstück durch zwei feste Leiter, die einen Abstand l voneinander haben, erfolgen. Der Strom I wird durch eine Spannungsquelle U0 angetrieben, den Gesamtwiderstand von Zuführung und beweglichem Leiterstück fassen wir in R zusammen. Das Magnetfeld mit der Feldstärke B soll homogen sein. Abb. 5.205 Einfaches Modell eines Elektromotors mit gradliniger Bewegung (Linearmotor). Befindet sich das Leiterstück zunächst in Ruhe, so erfährt es nach Einschalten der Spannung U0 eine Kraft F gemäß (5.256) in x-Richtung. Sobald das beschleunigte Leiterstück jedoch eine von null verschiedene Geschwindigkeit erreicht hat, so wird eine Spannung (5.346) induziert, die U0 entgegengerichtet ist, so dass der Strom I entsprechend reduziert wird. Damit wirkt nur noch die Kraft F = IBl , mit I = U 0 − Blv U U 0 − Blv Bl . = ⇒ F= R R R (5.507) 706 5 Elektrizität und Magnetismus Diese Kraft und ggf. noch weitere, in x-Richtung wirkende Kräfte, z. B. Reibungskräfte, beschleunigen das bewegliche Leiterstück der Masse m. Sind diese der Kraft F entgegengerichtet, so nennen wir sie Lastkräfte FLast. F − FLast = U 0 − Blv Bl − FLast = ma . R (5.508) Das bewegliche Leiterstück wird beschleunigt, bis die antreibende Kraft F – FLast = 0 ist, dann hat es die maximale Geschwindigkeit vm erreicht. Diese beträgt U 0 − Blv m U R Bl − FLast = 0 ⇒ v m = 0 − FLast , R Bl ( Bl ) 2 (5.509) wobei der Strom I= U 0 − Blv m U 0 Bl U 0 FLast R F = − ( − ) = Last 2 R R R Bl ( Bl ) Bl (5.510) fließt. Der Verlauf von vm in Abhängigkeit der Last FLast ist linear fallend, die Steigung ist umgekehrt proportional zu B. Diese Kennlinie kann durch Veränderung von U0 bzw. B variiert werden. Eine Änderung von U0 bewirkt eine Parallelverschiebung, durch Variation von B wird die Steigung verändert. Bei kleinen Lasten wirkt eine Verkleinerung von B geschwindigkeitssteigernd, da weniger Spannung induziert wird. Oberhalb einer bestimmten Last kehrt vm sein Vorzeichen um, die Last zwingt das Leiterstück zu einer Bewegung entgegen der antreibenden Kraft F. m/s max. Geschwindigkeit 40 ↑ 30 B , 2U 0 ½B , U 0 20 B, U0 10 2B , U 0 0 0 5 10 15 N 20 F Last → Abb. 5.206 Erreichbare Maximalgeschwindigkeiten vm des bewegten Leiterstücks in Abb. 5.205 in Abhängigkeit von der Last FLast bei verschiedenen Spannungen U0 und Feldstärken B. 5.4 Wechselstrom 707 Die elektrische Leistung, die der Spannungsquelle entnommen wird, beträgt mit (5.510) Pel . = U 0 I (v m ) = U 0 FLast = FLast v m, L , Bl (5.511) wobei vm,L = vm(FLast = 0) = U0/(Bl) die Leerlaufgeschwindigkeit ohne Einfluss äußerer Kräfte darstellt. Der Motor gibt dabei die mechanische Leistung Pmech. = FLast v m (5.512) ab. Die Differenz ΔP = Pel . − Pmech. = FLast (v m, L − v m ) = FLast FLast R = I 2R ( Bl ) 2 (5.513) ist die elektrische Leistung, die am Widerstand R in Wärme umgesetzt wird. Wirkt die externe Kraft in Richtung von F, so wird vm gegenüber der Leerlaufgeschwindigkeit gesteigert. Ist der Strom in (5.507) im Leerlauffall null, da induzierte Spannung und Quellenspannung sich aufheben, so überwiegt nun die induzierte Spannung, die Stromrichtung kehrt sich um und der Motor wirkt als Generator. Besonders interessant ist der Fall U0 = 0. Der Strom, den die induzierte Spannung (5.346) verursacht, beträgt – BlvmR. Gleichstrommaschinen Für viele Anwendungen werden Motoren benötigt, die eine Rotationsbewegung ausführen. Wir haben gesehen, dass eine stromdurchflossene Leiterschleife im Magnetfeld ein Drehmoment (5.268) erfährt, das proportional zum Strom durch die Leiterschleife ist. Dieses Drehmoment ist u. a. abhängig vom Sinus des Winkels zwischen Feldrichtung und dem magnetischen Moment (5.270), so dass seine Komponente in Feldrichtung mit jeder halben Umdrehung seine Richtung wechselt. Bei konstantem Strom bewegt sich die Leiterschleife vom labilen Gleichgewicht (Magnetisches Moment und Feldrichtung antiparallel) zum stabilen Gleichgewicht, in dem beide Richtungen parallel sind. Damit die Bewegung nicht beendet wird, muss diese Stellung durch Umkehrung des Stromes und damit des magnetischen Momentes in eine labile Gleichgewichtslage umgewandelt werden. Diese Aufgaben haben so genannte Stromwender oder Kommutatoren1. Diese bestehen aus zwei Lamellen, die auf einem Rad, das auf der Welle der Leiterschleife angebracht ist, befestigt sind und den Umfang des Rades in zwei gleich große Segmente unterteilen. Die Stromzufuhr erfolgt über so genannte Bürstenkontakte, die nicht mitrotieren, so dass pro Umdrehung die Stromrichtung in der Schleife umgekehrt wird. Damit der zeitliche Verlauf des Drehmomentes gleichmäßiger wird als in Abb. 5.208, werden auf der Welle mehrere, zueinander verdrehte Leiterschleifen zum so genannten Rotor angeordnet. Die Drehmomente der einzelnen Schleifen, die um den entsprechenden Winkel zeitlich versetzt verlaufen, addieren sich zum Gesamtdrehmoment. 1 Commutare, lat. vertauschen. 708 5 Elektrizität und Magnetismus M/Mmax ↑ 180 270 360 450 ° 540 Drehwinkel → Abb. 5.207 Rotationsmotor mit einer Leiterschleife und Kommutator. Die momentanen Stromrichtungen durch die „Stäbe“ der Leiterschleife, die immer senkrecht zur Flussdichte stehen, sind durch ⊗ (in die Zeichenebene) und ~ (aus der Zeichenebene heraus) gekennzeichnet. Abb. 5.208 Verlauf des Drehmomentes eines Motors aus Abb. 5.207, ausgehend vom labilen Gleichgewicht bei einem Drehwinkel von 180° der Leiterschleifennormale gegen die Feldrichtung. Die Stromzuführung erfolgt auch hier durch einen Kommutator, jede Leiterschleife hat dabei zwei gegenüberliegende Lamellen. Damit nur zwei Bürsten benötigt werden, trennt man die die Leiterschleifen auf und verschaltet die Stäbe, das sind die Leiterstücke, welche immer senkrecht zur Feldrichtung stehen, anders. Dies hat keine Auswirkung auf die Drehmomente der Leiterschleifen, da die Kräfte, welche die Drehmomente bewirken, nur durch den Strom durch die Stäbe verursacht werden. Es muss nur gewährleistet sein, dass die Ströme von zwei auf dem Rotor gegenüberliegenden Stäben entgegengesetzt gerichtet sind. Abb. 5.210 zeigt ein mögliches Verdrahtungsschema für einen Rotor mit zwei um 90° verdrehten Leiterschleifen. Das gesamte Drehmoment eines Rotors mit n zueinander um gleich große Winkel δ verdrehten Leiterschleifen der Fläche A beträgt mit (5.268) n n −1 i =1 i =0 M = ∑ IAB | sin(ϕ(t ) + (i − 1)δ | = IAB∑ | sin(ϕ(t ) + (i − 1)δ | , M ≈ IABk Σ = IBk , (5.514) dabei ist ϕ (t) der momentane Drehwinkel. Der Betrag ergibt sich aus der Stromwenderfunktion des Kommutators. Bei hinreichend großer Zahl von Leiterschleifen ist die Summe näherungs- 5.4 Wechselstrom 709 Abb. 5.209 Verlauf des Gesamtdrehmomentes von Rotationsmotoren mit (a) zwei um 90°, (b) drei um 60° und (c) vier um 45° verdrehten Leiterschleifen. Abb. 5.210 (a) Verdrahtungsschema eines Rotors mit zwei um 90° verdrehten Leiterschleifen (4 Stäbe). Es ist die Abwicklung des Rotors und des Kommutators dargestellt. (b) dto. nach einer Vierteldrehung. Die Stromrichtung in den Stäben Ia und Ib ist umgekehrt worden. 710 5 Elektrizität und Magnetismus weise konstant mit dem Wert kΣ, diese fassen wir mit A zur Motorkonstanten k zusammen. Die Stromversorgung erfolgt über eine Quelle mit der Spannung U0, allerdings wird durch die Rotation in die Leiterschleifen gemäß (5.345) eine Spannung n d cos(ϕ + (i − 1)δ) | = BA∑ ϕ | sin(ϕ + (i − 1)δ) | , dt i =1 i =1 mit ω = ϕ ⇒ U ind ≈ BωAk Σ = Bkω n U ind . = ∑ − BA | (5.515) induziert, so dass die den Strom treibende Spannung nur die um die induzierte Spannung verminderte Quellenspannung ist. Vergleichen wir (5.514) und (5.515) mit (5.507), so entspricht die Kraft F des Linearmotors dem Drehmoment M des Rotationsmotors, die Geschwindigkeit v entspricht der Winkelgeschwindigkeit ω, die Länge l des beweglichen Leiterstücks im Linearmotor entspricht der Motorkonstanten k. In Anlehnung an (5.509) ergibt sich der Zusammenhang zwischen einem Lastdrehmoment MLast und der Winkelgeschwindigkeit ωm, die der Motor dabei erreicht zu ωm = U0 R − M Last . Bk ( Bk ) 2 (5.516) Ein positives Lastdrehmoment MLast ist einer positiven Winkelgeschwindigkeit ωm entgegengerichtet. Der Widerstand R ist der gesamte Ohmsche Widerstand aller Leiterschleifen sowie der Stromzuführung. Der Verlauf (5.516) der erreichten Winkelgeschwindigkeit bei gegebenem Lastdrehmoment entspricht dem Verlauf (5.509) der Geschwindigkeit eines Linearmotors bei gegebener Last (siehe Abb. 5.206). Variationen von U0 und B wirken sich in gleicher Weise aus: Eine Veränderung von U0 hat eine Parallelverschiebung der Kennlinien zur Folge, bei unterschiedlichen Flussdichten B ändert sich die Steigung. U0/(Bk) = ωm,L ist die Leerlaufwinkelgeschwindigkeit des Motors ohne Einfluss äußerer Drehmomente. Der Motor nimmt die elektrische Leistung Pel . = U 0 I (ω m ) , (5.510) ⇒ I (ω m ) = Pel . = U 0 M Last ⇒ Bk M Last = M Last ω m, L Bk (5.517) auf, die er in mechanische Leistung Pmech. = M Last ω m (5.518) und Wärme umwandelt. Hieraus ergibt sich ein Wirkungsgrad η Motor = Pmech. ω = m Pel . ω m, L U 0 M Last R − Bk ( Bk ) 2 M R = = 1 − Last . U0 U 0 Bk Bk (5.519) 5.4 Wechselstrom 711 Dieser sinkt mit wachsendem Lastdrehmoment bis auf null, dann ist die Last so groß geworden, dass ωm = 0 ist. Negative η bedeuten, dass durch die Last die Drehrichtung des Motors gegenüber dem Leerlauf umgekehrt wurde und damit durch die Bewegung der Last keine Leistung abgegeben, sondern aufgenommen wird. Wie der Linearmotor arbeitet der Rotationsmotor im Generatorbetrieb, wenn durch eine negative Last bzw. einen externen Antrieb die Winkelgeschwindigkeit gegenüber dem Leerlaufwert gesteigert wird. Ohne äußere Spannungsquelle treibt die induzierte Spannung den Strom durch den Widerstand der Leiterschleifen (Wicklungswiderstand) und einem Lastwiderstand, an dem die elektrische Energie abgegriffen wird, an. Abb. 5.211 Generator im Stromkreis mit Wicklungswiderstand und Lastwiderstand. Bei gegebener Winkelgeschwindigkeit ωm wird eine Spannung Uind. = Bkωm induziert, die im Stromkreis I = Uind./R = Uind./(RG + RL) antreibt. Die elektrische Leistung, die der Quelle mit der Spannung Uind. entnommen wird, beträgt Pel . = U ind I = 2 U ind ( Bkω m ) 2 . = . RG + R L RG + R L (5.520) Zum Antrieb des Generators ist gemäß (5.516) (U0 = 0) ein (negatives) Lastdrehmoment oder ein positives Antriebsdrehmoment MA − M Last = ( Bk ) 2 ωm = M A RG + R L (5.521) erforderlich. Die mechanische Leistung Pmech. = M A ω m = ( Bk ) 2 ω 2m RG + R L (5.522) 712 5 Elektrizität und Magnetismus entspricht der elektrischen Leistung, allerdings kann einem Verbraucher mit dem Widerstand RL nur PNutz = R L I 2 = R L 2 U ind ( Bkω m ) 2 . = R L ( RG + R L ) 2 ( RG + R L ) 2 (5.523) zur Verfügung gestellt werden. Entsprechend beträgt der Wirkungsgrad des Generators η Generator = PNutz R RL = , RG << RL ⇒ η Generator ≈ 1 − G . Pmech. RG + R L RL (5.524) Bei den bislang betrachten Motoren bzw. Generatoren sind wir davon ausgegangen, dass die Flussdichte B für jeden Betriebszustand konstant ist. Dies ist immer der Fall, wenn das Magnetfeld durch einen Permanentmagneten erzeugt wird. Diesen Teil der Maschine, der sich nicht bewegt, bezeichnet man auch als Stator. Um die Flussdichte B an den Stäben des Rotors zu erhöhen, besteht dieser üblicherweise aus Material mit hoher relativer Permeabilität. In diesen Körper sind die Stäbe eingelassen. Zur Vermeidung von Wirbelströmen besteht der Rotor in der Regel aus einem Stapel dünner Bleche. Näherungsweise ist die Flussdichte B am Ort der Stäbe konstant. Abb. 5.212 Elektromotor, bei dem das Magnetfeld durch einen Permanentmagneten erzeugt wird. Alternativ zum Permanentmagneten kann die Magnetfelderzeugung auch durch Elektromagnete erfolgen. Dies ist bei größeren Maschinen von Vorteil, wenn Permanentmagnete in dem magnetischen Kreis von Stator und Rotor die erforderliche Flussdichte nicht mehr mit vertretbarem Aufwand erzielen können. Bei Motoren werden diese Statorwicklungen ebenfalls durch die externe Spannungsquelle versorgt. Grundsätzlich können Stator- und Rotorwicklungen parallel oder in Reihe geschaltet werden. Im ersten Fall spricht man auch von einer Nebenschlussmaschine, im zweiten von einer Hauptschlussmaschine. Nebenschlussmotor Der Strom I aus der Spannungsquelle teilt sich in die Ströme IS durch die Statorwicklung und IR durch die Rotorwicklung auf. Die Flussdichte B am Ort der Stäbe im Rotor ist proportional 5.4 Wechselstrom 713 zum Strom durch die Statorwicklung, dieser wird wiederum durch die Quellenspannung U0 und den Ohmschen Widerstand RS der Statorwicklung bestimmt. B = k S I S , U 0 = RS I S ⇒ B = k S U0 RS (5.525) Setzen wir (5.525) in (5.516) ein, so erhalten wir den Zusammenhang zwischen Winkelgeschwindigkeit ωm und dem Lastdrehmoment MLast. ωm = U0 M Last R R R R R RS2 − ⇒ ωm = S − M Last U U k S k (k S kU 0 ) 2 k S 0 k (k S 0 k ) 2 RS RS (5.526) (5.526) zeigt wie (5.516) einen linearen Zusammenhang zwischen ωm und MLast. Zu beachten ist, dass der magnetische Kreis von Rotor und Stator nicht die Sättigungsmagnetisierung erreicht. In diesem Fall würde die Flussdichte nicht mehr mit kS proportional zum Strom IS sein, sondern geringer, so dass die Winkelgeschwindigkeit ebenfalls absinkt. Außerhalb der Sättigungsmagnetisierung kann die Winkelgeschwindigkeit bei gegebener Last durch die Versorgungsspannung U0 oder den Statorwiderstand RS geregelt werden. In letzterem Fall wird mit der Statorwicklung ein regelbarer Widerstand in Reihe geschaltet. Durch geeignete Wahl der Parameter kann die Kennlinie ωm(MLast) sehr flach verlaufen, so dass bei Lastschwankungen die Drehzahl nur wenig verändert wird. Daher werden Nebenschlussmotoren bevorzugt dort eingesetzt, wo es auf möglichst geringe Drehzahlschwankungen ankommt, so z. B. als Antrieb von Werkzeugmaschinen. ½U 0 , R S 150 1/s U 0, R S 2U 0 , 3R S 100 ωm ↑ 2U 0 , ½R S 2U 0 , R S 50 Generator Motor 0 -10 -5 0 5 10 Nm 15 M Last → Abb. 5.213 Schaltbild eines Nebenschlussmotors. Abb. 5.214 Maximale Winkelgeschwindigkeit in Abhängigkeit von der Last MLast bei einer Nebenschlussmaschine (verschiedene Kombinationen von Spannung U0 und Statorwiderstand RS. Bei negativen Lasten arbeitet die Maschine als Generator. 714 5 Elektrizität und Magnetismus Hauptschlussmotor Hier fließt der Strom I aus der Spannungsquelle sowohl durch die Stator- als auch durch die Rotorwicklung. Die Flussdichte ist proportional zum Strom durch den Stator, B = kSI. Der Strom I lässt sich aus der Maschengleichung von Abb. 5.215 berechnen. U 0 − U ind = ( R S + R R ) I , mit U ind = Bkω m und B = k S I ⇒ I= U0 ( R S + R R ) + kk S ω m (5.527) In Anlehnung an (5.510) ergibt sich der Zusammenhang I (ω m ) = M Last ⇒ M Last = IBk , mit B = k S I ⇒ M Last = kk S I 2 . Bk (5.528) Abb. 5.215 Elektromotor, bei dem Rotor und Stator in Reihe geschaltet sind. 100 1/s Hauptschlussm. Nebenschlussm. max. Drehmoment 75 ωm ↑ 50 25 0 0 -25 10 20 30 40 Nm 50 M Last → Abb. 5.216 Verlauf der Winkelgeschwindigkeit in Abhängigkeit vom Lastdrehmoment. Zum Vergleich die Kennlinie eines Nebenschlussmotors mit den gleichen Betriebsbedingungen. Negative Winkelgeschwindigkeit bedeutet, dass die Last den Motor in die entgegengesetzte Richtung dreht. 5.4 Wechselstrom 715 Lösen wir (5.528) nach I auf und setzen dies in (5.527) ein, so erhalten wir die Winkelgeschwindigkeit in Abhängigkeit vom Lastdrehmoment. M Last U0 = kk S ( R S + R R ) + kk S ω m ⇒ ωm = U0 kk S M Last − RS + RR kk S (5.529) Die Kennlinie ωm(MLast) verläuft beim Hauptschlussmotor gekrümmt, bei geringen Lasten steigt die Winkelgeschwindigkeit stark an und wird nur durch Reibung im Motor begrenzt. Große Lastdrehmomente können bei sehr kleinen Winkelgeschwindigkeiten erreicht werden, daher werden Hauptschlussmotoren gern als Anlasser für Verbrennungsmaschinen eingesetzt. Wechselstrommaschinen Die in den vorigen Seiten beschriebenen Maschinen können, als Motoren eingesetzt, auch mit Wechselstrom betrieben werden. Wird das Magnetfeld durch einen Permanentmagneten erzeugt und der Wechselstrom dem Rotor über Schleifringe, also ohne Umpolung, zugeführt, so ist ein antreibendes Drehmoment möglich, wenn die Winkelgeschwindigkeit der Kreisfrequenz des Wechselstroms entspricht. Dies gelingt allerdings nur, wenn der Motor mit der richtigen Drehzahl angeworfen wird. Diese wird für unterschiedliche Lastdrehmomente beibehalten. Auch Nebenschluss- und Hauptschlussmotoren eignen sich für den Wechselstrombetrieb, da die Richtung des Statorfeldes (nahezu) gleichzeitig mit der Richtung des Rotorstromes wechselt. Bei der Behandlung der Gleichstrommaschinen haben wir die Induktivität der Rotorwicklungen nicht berücksichtigt. Sie bewirkt, dass der Strom der antreibenden Spannung nacheilt, so dass das Drehmoment verkleinert wird. Wird dagegen der Rotor mit einem Wechselstrom durchflossen, dessen Frequenz groß gegen die Drehzahl ist, so können wir die Induktivität des Rotors nicht mehr vernachlässigen. Der Hauptschlussmotor, bei dem die Induktivitäten im Rotor und Stator klein gehalten sind, wird häufig als „Universalmotor“ eingesetzt, wenn die Anforderungen an das Lastdrehmoment nicht besonders groß sind wie z. B. bei Haushaltsgeräten. Diese Nachteile hat der Induktionsmotor oder Asynchronmotor nicht. Bei ihm wird der Strom durch die Leiterschleifen des Rotors durch induzierte Spannungen bewirkt. Dem In- Abb. 5.217 Starre Leiterschleife im Magnetfeld. Eine Spannung kann induziert werden, wenn sich die Feldstärke oder die Orientierung der Schleife zum Feld ändert. 716 5 Elektrizität und Magnetismus duktionsgesetz (5.343) sind sie gleich der zeitlichen Änderung des magnetischen Flusses durch die Leiterschleife. Diese Änderung kann durch Änderung der magnetischen Feldstärke, der Größe der von der Leiterschleife eingeschlossenen Fläche oder der Orientierung der Leiterschleife zur Feldrichtung bewirkt werden. Wird mit einer Wechselspannungsquelle das Statorfeld aufgebaut, so ändert sich mit deren Frequenz ωF die Feldstärke wie B (t ) = Bˆ cos(ω F t ) . Nach (5.344) wird in die Leiterschleife eine Spannung induziert, die einen zu ihr phasenverschobenen Strom verursacht. Dieser Phasenwinkel ϕIU beträgt mit (5.446) und dem Ohmschen Widerstand RR und der Induktivität LR der Leiterschleife cos ϕ IU = cos ϕUI = RR R + (ω F L R ) 2 2 R (5.530) Die Leiterschleife, deren Flächennormale einen Winkel α zur Feldrichtung einschließt, erfährt ein Drehmoment (5.268), das sich zeitlich ändert und die Leiterschleife in Drehung versetzt. M = I ind BAR sin α = M = Dabei ist U ind ˆ B cos(ωF t ) AR sin α , (5.344) ⇒ ZR AR Bˆ ωF sin(ωF t + ϕIU ) cos αAR Bˆ cos(ωF t ) sin α | ZR | (5.531) 2 2 Z R = RR + (ωF LR ) der Scheinwiderstand und AR die Fläche der Leiterschleife. Allerdings ist wegen <sin α cos α > = 0 der Mittelwert von M über eine volle Drehung null. Daher wird beim Asynchronmotor durch ein rotierendes Magnetfeld in den Windungen des Rotors ein Strom induziert. Ein Drehfeld kann leicht durch die Überlagerung von zwei zueinander senkrecht verlaufenden Feldern, deren Feldstärken sich harmonisch mit der gleichen Frequenz ändern, erzeugt werden. Beide Felder müssen dann eine Phasenverschiebung von π/2 aufweisen. Dieser Fall entspricht der Überlagerung von zwei linearen harmonischen Schwingungen gleicher Frequenz und Phasenverschiebung π/2, deren Auslenkungsrichtungen senkrecht zueinander verlaufen. Der zeitliche Verlauf der resultierenden Auslenkung beschreibt als Lissajous-Figur einen Kreis, der Oszillator rotiert mit der Kreisfrequenz der Schwingungen. Statt zwei senkrecht zueinander schwingenden Feldrichtungen werden in der Regel drei um jeweils 120° zueinander verdrehte und um 120° phasenverschobene Feldrichtungen verwendet, diese werden mit Drehstrom aus dem Netz gespeist. Hat die Leiterschleifennormale in Abb. 5.217 den Winkel a zur momentanen Feldrichtung, so wird dem dritten Term in (5.344) zufolge eine Spannung U ind = − BAR d cos α = BAR α sin α dt (5.532) 5.4 Wechselstrom 717 induziert, die periodisch ist. Dabei ist α die Winkelgeschwindigkeit, mit der sich das Feld gegen die Leiterschleifennormale dreht. Diese verursacht in der Leiterschleife einen Strom, der phasenverschoben zur induzierten Spannung ist. Diese Phasenverschiebung (5.446) wird u. a. bestimmt durch die (momentane) Kreisfrequenz α , mit der sich der magnetische Fluss durch die Leiterschleife ändert. Damit erfährt die Leiterschleife ein Drehmoment (5.268). M = I ind BAR sin α = M = ( BAR ) 2 α sin(α + ϕ IU ) sin α , |ZR | ( BAR ) 2 α (sin 2 α cos ϕ IU + cos α sin α sin ϕ IU ) ⇒ |ZR | < M > α =< ( BAR ) 2 α sin 2 α cos ϕ IU > |ZR | (5.533) Befindet sich die Leiterschleife anfangs in Ruhe, so entspricht α der Winkelgeschwindigkeit, mit der das Feld rotiert. Das (mittlere) Drehmoment versetzt die Leiterschleife in beschleunigte Drehbewegung, dadurch sinken α und damit auch das Drehmoment. Wirkt auf die Motorwelle ein äußeres Lastdrehmoment, so beschleunigt die Leiterschleife bis zu einer mittleren Winkelgeschwindigkeit ωR. Dann hat sich auch eine mittlere Winkelgeschwindigkeit < α >:= ω S eingestellt, sie ist die Differenz zwischen ωF und ωR. Diese Winkelgeschwindigkeit ωS ist auch maßgeblich für die Impedanz ZR der Leiterschleife. Das Verhältnis ωS/ωF nennt man auch „Schlupf“ des Asynchronmotors. Die momentanen Winkelgeschwindigkeiten nähern sich wie beim Gleichstrommotor umso besser dem zeitlichen Mittelwert an, wenn mehrere zueinander verdrehte Leiterschleifen den Rotor bilden. Dabei werden die senkrecht zur Feldrichtung verlaufenden Stäbe an ihren Enden durch Metallringe kurzgeschlossen. Wegen der Ähnlichkeit mit einem Käfig nennt man diese Konstruktion auch „Käfigläufer“. Der große Vorteil ist, dass kein Strom externer Quellen durch Schleifringe oder Kommutatoren in den Rotor transportiert werden muss. Abb. 5.218 Käfig- oder Kurzschlussläufer. 718 5 Elektrizität und Magnetismus Im Gleichgewicht mit einem Lastdrehmoment MLast erhalten wir aus (5.533) unter Beachtung von (5.446) einen Zusammenhang MLast(ωS). < M > α = M Last = M Last = 1 2 1 ( BAR ) 2 ω S cos ϕ IU 2 |ZR | ( BAR ) 2 ω S RR R R2 + (ω S L R ) 2 R R2 + (ω S L R ) 2 = 2 Φ eff ωS RR (5.534) R R2 + (ω S L R ) 2 Hier haben wir ½(BAR)2 zum Quadrat des Effektivwertes des magnetischen Flusses durch die Leiterschleifen zusammengefasst. Lösen wir (5.534) nach ωS auf und berechnen die Winkelgeschwindigkeit des Motors ωR = ωF – ωS, so erhalten wir die Kennlinie des Asynchronmotors. Der Verlauf MLast(ωS) in (5.534) weist ein Maximum bei ωS = RR/LR auf, das maximale Drehmoment, mit dem der Asynchronmotor belastet werden kann, beträgt Φeff2/(2LR). Bei noch höherer Belastung ist keine Rotation mehr möglich, ωS (MLast) wird komplex, der Motor bleibt stehen. Daher nennt man das maximale Drehmoment auch „Kippmoment“, den dazugehörenden Schlupf „Kippschlupf“. Das Maximum ist umso ausgeprägter, je kleiner das Verhältnis RR/LR ist, mit wachsendem RR/LR wird das maximale Drehmoment bei größerem Schlupf, also kleineren Rotordrehzahlen, erreicht. Die Größe des maximalen Drehmomentes ändert sich jedoch nicht. Im Leerlauf bei MLast = 0 ist auch der Schlupf null, der Rotor dreht sich mit ωF, der Winkelgeschwindigkeit des Statorfeldes. Die Kennlinie ωR(MLast) des Asynchronmotors hat vom Leerlauf bis zum Drehmomentmaximum einen ähnlichen Verlauf wie der Nebenschlussmotor (siehe Abb. 5.214), ausgehend von der Winkelgeschwindigkeit ωF des Statorfeldes sinkt die Winkelgeschwindigkeit des Rotors mit steigender Belastung bis zum Erreichen des maximalen Drehmomentes. Wird die Belastung wieder zurückgenommen, so kann der Motor Zustände in der Kennlinie unterhalb des Drehmomentmaximums erreichen: Mit sinkender Belastung verringert sich die Drehzahl. ωF 100 1/s 75 50 75 100 50 200 ↑ 50 R R /L R = 50 100 25 200 ωR ωS ↑ R R /L R = 100 1/s 25 0 0 0 10 20 Nm 30 0 10 M Last → Abb. 5.219 Verlauf von MLast(ωS) und MLast(ωR) für verschiedene Verhältnisse RR/LR. 20 Nm M Last → 30 5.5 Elektromagnetische Wellen 719 Diese Zustände sind instabil und werden beim Anfahren des Motors aus der Ruhe durchlaufen. Beim Starten muss daher das Lastdrehmoment MStart kleiner sein als MLast(ωR = 0) in Abb. 5.219. Der Motor beschleunigt dann unter Einfluss des Drehmomentes (5.533), vermindert um MStart, und erreicht schließlich einen Zustand im stabilen Bereich der Kennlinie oberhalb des Kippmomentes mit ωR(MStart). Der instabile Bereich mit unter Umständen großen Winkelbeschleunigungen wird mit wachsendem RR/LR kleiner, daher wird in der Praxis beim Anlassen RR vergrößert, indem man externe Widerstände in die Leiterschleifen des Rotors einfügt. Dafür werden die Rotorwindungen aufgetrennt und über Schleifringe Kontakte bereitgestellt, an die Anlasswiderstände angeschlossen werden können. Weiterhin kann durch Variation der Widerstände die Drehzahl geregelt werden. Allerdings hat der Einbau von Widerständen eine Reduktion des Wirkungsgrades zur Folge, da ein Teil der in den Stator eingespeisten elektrischen Energie in Wärme umgewandelt wird und nicht mehr als mechanische Arbeit zur Verfügung steht. Mit moderner Elektronik kann dieser Nachteil umgangen werden, indem die Frequenz des Statorfeldes variiert wird und so Ohmsche Verluste vermieden werden. Da der Asynchronmotor im Vergleich zu anderen Elektromotoren sehr einfach gebaut ist, hat er eine große Verbreitung gefunden. Durch elektronisch angepasste Ansteuerung kann er den unterschiedlichen Anforderungen genügen. 5.5 Elektromagnetische Wellen Elektromagnetische Wellen, insbesondere als „Licht“, spielen in der Natur eine große Rolle. Schließlich hat die Erzeugung durch den Menschen als „Radiowellen“ der Informationsübertragung völlig neue Wege eröffnet. Wie wir in Kapitel 4.3 gesehen haben, breiten sich Wellen in einem „Medium“ aus, das an einer Stelle von einem Anregungszentrum aus seinem Gleichgewichtszustand gebracht wurde. Durch die Kopplung im Medium breitet sich diese Störung mit einer charakteristischen Geschwindigkeit aus, die abhängig ist von der Stärke der Kopplung und der Trägheit, mit der sich das Medium einer Zustandsänderung widersetzt. Eine solche „Fernwirkung“ kann durch elektrische und magnetische Felder erreicht werden, die durch Ladungen bzw. bewegte Ladungen verursacht werden. Diese stellen das Anregungszentrum dar, während der Raum, der von den Feldern erfüllt wird, als Medium fungiert. Damit stellt sich auch die Frage nach der Geschwindigkeit, mit der sich ein Feld ausbreitet, wenn ein Körper aufgeladen oder ein Strom eingeschaltet wird. Diese Ausbreitungsgeschwindigkeit spielte bislang in unseren Betrachtungen elektrischer und magnetischer Felder keine Rolle, da wir nur statische Ladungs- oder Stromverteilungen bei der Felderzeugung zugelassen haben oder bei Wechselströmen die Raumgebiete von Spulen und Kondensatoren so klein waren, dass die Felder praktisch zeitgleich mit ihrer Ursache auftraten. Aus dieser Tatsache können wir umgekehrt auf eine sehr hohe Ausbreitungsgeschwindigkeit schließen. Wir werden sehen, dass sie der Lichtgeschwindigkeit im Vakuum entspricht.