Seminararbeit Kastanek
Werbung

“Zufallsvariabeln und ihre
Verteilungsfunktionen, Unabhängigkeit von
Zufallsvariabeln, Stochastische Prozesse“
Ausarbeitungen zum Seminarthema
Counterexamples in Probabilities
von
Nicole Kastanek
Wien, 13. Januar 2016
Inhaltsverzeichnis
1 Verteilungsfunktionen von Zufallsvariabeln
3
1.1 Äquivalente Zufallsvariabeln sind identisch verteilt, aber die Umkehrung gilt nicht 3
1.2 X,Y identisch verteilt impliziert nicht, dass XZ, YZ identisch verteilt sind . . . . 4
1.3 n - dimensionale Verteilungsfunktionen . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Absolute Stetigkeit der Verteilung eines Zufallsvektors und seiner Komponenten . 5
1.5 Zusammenhang multivariater Verteilungen und Randverteilungen . . . . . . . . . 5
2 Unabhängigkeit von Zufallsvariabeln
2.1 Diskrete Zufallsvariablen, die paarweise Unabhängigkeit, aber nicht unabhängig
sind . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Abhängige Zufallsvariabeln, wo jede echte Teilmenge unabhängig ist . . . . . .
2.3 Abhängige Zufallsvariabeln X und Y, so dass X 2 und Y 2 unabhängig sind . . .
2.4 Unabhängigkeit von Zufallsvariabeln in Verbindung mit der charaketristischen
Funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5 Unabhängigkeit von Zufallsvariabeln in Verbindung mit der Momentenerzeugenden Funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.6 Diskrete Zufallsvariabeln, welche unkorreliert aber nicht unabhängig sind . . .
2.7 Stetige Zufallsvariabeln, welche unkorreliert aber nicht unabhängig sind . . . .
2.8 E(Y |X) = E(Y ) impliziert nicht die Unabhängigkeit von X und Y . . . . . . .
2.9 Es gibt keine Beziehung zwischen bedingter Unabhängigkeit und stochastischer
Unabhängigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.10 X,Y und X + Y Possion-verteilt implziert nicht dass X und Y unabhängig sind
7
.
.
.
7
8
9
.
9
.
.
.
.
11
12
13
13
. 14
. 15
3 Stochastische Prozesse
3.1 Ist es möglich einen Wahrscheinlichkeitsraum zu finden auf dem jede beliebiger
stochastischer Prozess definiert werden kann? . . . . . . . . . . . . . . . . . . . .
3.2 Beziehung zwischen Modifikation und ununterscheidar . . . . . . . . . . . . . . .
3.3 Stochastische Prozesse, die Modifikationen voneinander sind und trotzdem verschiedene Eigenschaften besitzen . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Stetigkeit des stochastischen Prozess impliziert nicht die Stetigkeit der natürlichen
Filteration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
Literaturverzeichnis
22
2
18
19
19
20
Kapitel 1
Verteilungsfunktionen von
Zufallsvariabeln
Definition 1.1. (Verteilungsfunktion) Eine Funktion F: R → R heißt Verteilungsfunktion im
engeren Sinn, wenn sie folgende Eigenschaften besitzt:
• F ist monoton wachsend
• F ist rechtsstetig
• limx→−∞ F (x) = 0 und limx→∞ F (x) = 1
1.1
Äquivalente Zufallsvariabeln sind identisch verteilt, aber
die Umkehrung gilt nicht
Definition 1.2. X und Y, zwei Zufallsvariabeln heißen äquivalent, wenn die
P (ω : X(ω) 6= Y (ω)) = 0.
Satz 1.3.
Vor.: X und Y äquivalente Zufallsvariabeln
Beh.: X und Y sind identisch verteilt.
Beweis. Seien X und Y äquivalent:
FX (x) = P (ω : X(ω) ≤ x) = P (ω : Y (ω) ≤ x) = FY (x) ∀x ∈ R
Folgendes Beispiel zeigt jedoch, dass die Umkehrung im Allgemeinen nicht gilt.
Beispiel 1.4. Zufallsvariable auf (Ω, F, P ), X sei stetig und symmertisch um 0.
Y := −X =⇒
FY (x) = P ([Y ≤ x]) = P ([−X ≤ x]) =
P ([X ≥ −x]) = P ([X ≤ x]) = FX (x)
3
Aber
P (ω : X(ω) = Y (ω)) = P (ω : X(ω) = −X(ω)) = P (ω : X(ω) = 0) = 0
1.2
X,Y identisch verteilt impliziert nicht, dass XZ, YZ identisch verteilt sind
Seien X, Y identisch verteilte Zufallsvariabeln auf (Ω, F, P ). Es ist bekannt, dass dann für eine
d
B-messbare Funktion g(X) = g(Y ) gilt. Diese Tatsache bringt die Frage auf, ob auch
d
d
X = Y =⇒ XZ = Y Z
für eine beliebige Zufallsvariable Z gilt?
Folgendes Beispiel zeigt, dass die Antwort im Allgemeinen Nein ist.
Beispiel 1.5. Zufallsvariable auf (Ω, F, P ), X sei stetig und symmertisch um 0.
Y := −X, Z := −X =⇒
d
XZ = Y Z
für X, die mit positiver Wahrscheinlichkeit einen Wert ungleich 0 annehmen unmöglich ist, da
XZ = −X 2 und Y Z = X 2 .
Wenn wir die Bedingung, X sei stetig verteilt, im vorigen Beispiel ausschließen, würde zwar
d
für X = 0 p − f s XZ = Y Z gelten, aber der Fall X = 0 p − f s ist im wesentlichen uninteressant.
1.3
n - dimensionale Verteilungsfunktionen
Definition 1.6. (n-dimensionale Verteilungsfuntion) Eine Funktion G: Rn → R heißt (mehrdimensionale) Verteilungsfunktion im engeren Sinn, wenn sie folgende Eigenschaften besitzt:
• G(x1 , . . . , xn ) ist monoton wachsend in jedem Argument
• G(x1 , . . . , xn ) ist rechtstetig wachsend in jedem Argument
• G(x1 , . . . , xn ) → 0 für mindestens ein xi → −∞
G(x1 , . . . , xn ) → 1 für alle xi → ∞, i = 1 . . . n
• Falls ai ≤ bi , i = 1 . . . n und ∆ai bi G(x1 , . . . , xn ) =
G(x1 , . . . , bi , . . . , xn ) − G(x1 , . . . , ai , . . . , xn ) ≥ 0
=⇒ ∆an bn . . . ∆a1 b1 G(x1 , . . . , xn ) ≥ 0
Wenn man die Definition der eindimensionalen Verteilungsfunktion vergleicht mit der mehrdimensionalen Verteilungsfunktion, sieht man, dass im eindimesionalen Fall der letzte Punkt in
der obigen Definition überflüssig ist. Für n > 1 kann man diesen Punkt jedoch nicht weglassen,
wie folgendes Beispiel zeigt
4
Beispiel 1.7. Sei G eine Funktion, die die ersten drei Punkte erfüllt.
0
x < 0 oder y < 0
G(x, y) =
min(1, max(x, y))
sonst
G erfüllt die Bedingungen 1-3 jedoch nicht die 4., da ∆0.2,1 ∆0.2,1 G(x, y) = −0.8 < 0. Um zu
sehen, dass das nicht sein darf betrachten wir folgendes Rechteck R = [0.2, 1] × [0.2, 1] und zwei
unabhängige Zufallsvariabeln X und Y:
P ((X, Y ) ∈ R) = P (0.2 ≤ X ≤ 1, 0.2 ≤ Y ≤ 1) = P (0.2 ≤ X ≤ 1)P (0.2 ≤ Y ≤ 1) =
P (X ≤ 0.2) − P (X ≤ 1) P (Y ≤ 0.2) − P (Y ≤ 1) =
P (X ≤ 0.2, Y ≤ 0.2) − P (X ≤ 0.2, Y ≤ 1) − P (X ≤ 1, Y ≤ 0.2) + P (X ≤ 1, Y ≤ 1) =
G(0.2, 0.2) − G(0.2, 1) − G(1, 0.2) + G(1, 1) =
0.2 − 1 − 1 + 1 = −0.8
1.4
Absolute Stetigkeit der Verteilung eines Zufallsvektors und
seiner Komponenten
Für die nächsten Überlegungen bleiben wir im zwei-dimensionalen Fall. Sei (X,Y) ein Zufallsvektor mit absolut stetiger Verteilung, dann kann man leicht sehen, dass X und Y auch absolut
stetig verteilt sind. Aber gilt auch die umkehrte Aussage?
Beispiel 1.8. Sei X eine Zufallsvariable mit stetiger Verteilung, Y := X. Offensichtlich ist
dann Y auch stetig verteilt. Angenommen der Vektor (X,Y) sei stetig verteilt. Dann existiert
eine Dichte f und es würde gelten
Z Z
f (x, y)dλ(x, y), ∀B ∈ B
(1.1)
P {(X, Y ) ∈ B} =
B
Aber alle Werte des Zufallsvektors (X,Y) sind auf der Linie l : x = y. Wenn wir also für
B = l = {(x, y)|x = y} nehmen, dann ist die linke Seite von 1.1 gleich 1, aber die rechte Seite
ist 0, da das Lebesguemaß einer Linie immer 0 ist.
Somit haben wir ein Beispiel gefunden, wo X und Y absolut stetig sind aber (X,Y) nicht. Dass
heißt die Umkehrung gilt im Allgemeinen nicht.
1.5
Zusammenhang multivariater Verteilungen und Randverteilungen
Falls ein Zufallsvektor (X1 , . . . Xn ) die Verteilungsfunktion F (x1 , . . . xn ) besitzt, so sind die
Randverteilungen Fj (x) = P (Xj ≤ x), j = 1 . . . n P-fs eindeutig bestimmt. Das nächste Beispiel
zeigt, dass die Umkehrung der Aussage im Allgemeinen nicht gelten muss.
Beispiel 1.9. Gegeben sind zwei Wahrscheinlichkeitsdichten:
f (x, y) =
1
4 (1
+ xy), |x| ≤ 1, |y| ≤ 1
0
sonst
5
g(x, y) =
1
4
0
|x| ≤ 1, |y| ≤ 1
sonst
Die Randdichten sind:
R
1
[−1,1] 4 (1 + xy) =
f1 (x) =
0
g1 (x) =
1
2
|x| ≤ 1
0 sonst
1
2
|x| ≤ 1
sonst
g2 (y) =
1
2
0
f2 (y) =
1
2
0
|y| ≤ 1
sonst
|y| ≤ 1
sonst
Wir haben also ein Beispiel gefunden, wo die Randdichten p-fs übereinstimmen, doch die gemeinsamen Dichten unterschiedlich sind.
6
Kapitel 2
Unabhängigkeit von Zufallsvariabeln
Definition 2.1. (Unabhängigkeit von Zufallsvariabeln) X1 und X2 auf (Ω, F, P) heißen unabhängig wenn
P (X1 ∈ B1 , X2 ∈ B2 ) = P (X1 ∈ B1 )P (X2 ∈ B2 )
(2.1)
∀B1 , B2 ∈ B
X1 , ..., Xn heißen unabhängig wenn ∀k 2 ≤ k ≤ n
1 ≤ i1 < ... < ik ≤ n, Bi1 , ..., Bik ∈ B
P (Xi1 ∈ Bi1 , . . . , Xik ∈ Bik ) = P (Xi1 ∈ Bi1 ) . . . P (Xik ∈ Bik )
(2.2)
Bemerkung: Gilt (2.2) für k = 2, heißen die Zufallsvariabeln paarweise unabhängig.
2.1
Diskrete Zufallsvariablen, die paarweise Unabhängigkeit, aber
nicht unabhängig sind
Beispiel 2.2. Sei (X,Y,Z) Zufallsvektor mit Werten (1, 0, 0), (0, 1, 0), (0, 0, 1), (1, 1, 1)
die jeweils mit Wahrscheinlichkeit 41 angenommen werden,
1
4
1
P (X = 0, Z = 1) =
4
1
P (X = 1, Z = 0) =
4
1
P (X = 1, Z = 1) =
4
P (X = 0, Z = 0) =
= P (X = 0)P (Z = 0)
= P (X = 0)P (Z = 1)
= P (X = 1)P (Z = 0)
= P (X = 1)P (Z = 1)
analog für X,Y und für Y,Z . Aber
P (X = 1, Y = 1, Z = 1) 6= P (X = 1)P (Y = 1)P (Z = 1)
7
Um die nächsten Behauptung zu zeigen brauche ich folgende Sätze.
Satz 2.3.
Vor.: Stetige Zufallsvariablen X1 , . . . Xn mit Dichten f1 (x1 ), . . . , fn (xn ).
Beh.: X und Y sind genau dann unabhängig wenn für die gemeinsame Dichte gilt
f (x1 , . . . , xn ) = f1 (x1 ) . . . fn (xn ) ∀x1 , . . . xn ∈ R.
Satz 2.4.
Vor.: X und Y Zufallsvariabeln
Beh.: X und Y sind genau dann unabhängig wenn
P (X ≤ x, Y ≤ y) = P (X ≤ x)P (Y ≤ y) ∀x, y ∈ R.
2.2
Abhängige Zufallsvariabeln, wo jede echte Teilmenge unabhängig ist
Beispiel 2.5. Sei f eine Funktion mit
(2π)−n (1 − cos(x1 ) · . . . · cos(xn )), (x1 , . . . , xn ) ∈ Qn
f (x1 , . . . , xn ) =
0,
sonst
Wobei Qn := [0, 2π]n .
Da cos(x) beschränkt ist mit 1, ist f nicht negativ. Außerdem gilt:
Z
f (x1 , . . . , xn )d(x1 . . . xn ) =
Rn
Z
Z 2π
−n
(1 − cos(x1 ) · . . . · cos(xn ))dx1 d(x2 . . . xn ) =
(2π)
Qn−1 0
Z
−n
(2π)
(2π − sin(2π) · . . . · cos(xn )) − (0 − sin(0) · . . . · cos(xn ))d(x2 . . . xn ) =
Qn−1
Z
(2π)−n
2πd(x2 . . . xn ) =
Qn−1
Z
−n+1
(2π)
1d(x2 . . . xn ) = (2π)−n+1 · (2π)n−1 = 1
Qn−1
Daraus folgt, dass f Wahrscheinlichkeitsdichte ist. Die Randdichten lassen sich analog ausrechnen, z.B.: Für x1 ∈ [0, 2π]
Z
f1 (x1 ) =
f (x1 , . . . , xn )d(x2 . . . xn ) = (2π)−n+1 · (2π)n−2 = (2π)−1
Rn−1
und f1 (x1 ) = 0 sonst.
Wählt man k (Definition 2.1, (2.2)) ungleich n so gilt, für die gemeinsame Dichte von Xi1 . . . Xik :
fXi1 ...Xik (xi1 , . . . , xik ) = (2π)−k = fi1 (xi1 ) . . . fik (xik )
8
Mit Satz 2.3 folgt Xi1 . . . Xik unabhängig aber für xi1 = · · · = xik = 0 gilt
f (x1 , . . . , xn ) = 0 6= (2π)−k = fi1 (xi1 ) · . . . · fin (xin )
und deshalb sind Xi1 . . . Xin abhängig.
2.3
Abhängige Zufallsvariabeln X und Y, so dass X 2 und Y 2
unabhängig sind
Es ist bekannt, dass wenn X,Y unabhängig Zufallsvariabeln sind und g eine beliebige stetige
Funktion, dass dann auch g(X) und g(Y) unabhängig sind. Die umkehrte Aussage gilt dann,
wenn g eine bijektive Funktion ist, im Allgemeinen aber nicht.
Beispiel 2.6. Sei (X, Y ) Zufallsvektor mit gemeinsamer Dichte
f (x, y) =
1
4 (1
+ xy) |x| < 1, |y| < 1
0
sonst
Es gilt f ist Dichte da:
• fX1 ,X2 (x, y) ≥ 0
R
• R2 fX1 ,X2 (x, y)d(x, y) =
f1 (x) =
1
4
R1
−1 (1
1
4
R1 R1
−1 −1 (1
+ xy)dy =
0
1
2
+ xy)dxdy = 1
|x| ≤ 1
sonst
f2 (y) =
1
4
R1
−1 (1
+ xy)dx =
0
1
2
|y| ≤ 1
sonst
Für
x=y=
1
gilt f (x, y) 6= f1 (x)f2 (y)
2
und wegen Satz 2.3 gilt, dass X und Y abhängig sind. Wegen Satz 2.4 bleibt zu zeigen:
P (X 2 < x, Y 2 < y) = P (X 2 < x)P (Y 2 < y)
Z s
s ≤ −1
0
s
1
+
s
∈
(−1, 1)
P (X < s) =
f1 (x)dx =
2 2
−∞
1
s≥1
(2.3)
(2.4)
X 2 ∈ [0, 1), x, y ∈ [0, 1)
√
√
√
√
P (X 2 < x, Y 2 < y) = P (− x < X < x, − y < Y < y) =
Z √x Z √y
√ √ (2.3)
1
x y = P (X 2 < x)P (Y 2 < y)
(1
+
uv)dudv
=
√
4 − x − √y
2.4
Unabhängigkeit von Zufallsvariabeln in Verbindung mit der
charaketristischen Funktion
9
Definition 2.7. (Charakteritische Funktion) Sei X eine Zufallsvariable auf einem Wahrscheinlichkeitsraum (Ω, F, P). Die Funktion
φ(t) = E(eitX ) t ∈ R
heißt charakteristische Funktion.
Satz 2.8.
Vor.: X1 , X2 unabhängige Zufallsvariabeln, φ1 , φ2 ihre charakteristischen Funktionen und φ
sei die charakteristische Funktion von X1 + X2 .
Beh.: Dann gilt φ = φ1 φ2 .
Wir können uns nun folgende Frage stellen: Seien φ1 , φ2 , φ die charakteristischen Funktionen
von X1 , X2 und X1 + X2 und es gilt φ = φ1 φ2 , impliziert dies, dass X1 und X2 unabhängig
sind? Folgendes Beispiel soll zeigen, das die Antwort im Allgemeinen Nein ist.
Beispiel 2.9. ei (X,Y) ein Zufallsvektor mit gemeinsamer Dichte
1
2
2
4 (1 + xy)(x − y ), |x| ≤ 1, |y| ≤ 1
f (x, y) =
0
sonst
Die Randdichten sind:
1
2 |x| ≤ 1
f1 (x) =
0 sonst
f2 (y) =
1
2
0
|y| ≤ 1
sonst
Für x = 12 , y = 12 gilt f (x, y) < f (x)f (y) und mit Satz 2.3 folgt, dass X und Y abhängig sind.
Da X und Y identisch verteilt sind, gilt:
Z 1
1
1 it
sin(t)
itY
φ1 (t) = φ2 (t) = E(e ) =
eity dy =
(e − e−it ) =
2
2it
t
−1
Nun müssen wir g(z) die Dichte von Z := X + Y bestimmen.
Z
P (Z ≤ z) = PZ ((t, u) : t + u ≤ z) =
fZ (t, u)d(t, u) =
Z
∞
Z
{(t,u):t+u≤z}
Z ∞Z z
z−t
fZ (t, u)dudt =
−∞
−∞
−∞
Z
−∞
z
Z
−∞
fZ (t, |v {z
− }t)dvdt =
−∞
|
=u
∞
fZ (t, v − t)dt dv
{z
}
g(v):=
Damit fZ (v) 6= 0 : |t| ≤ 1 und |v − t| ≤ 1 =⇒ v − t ≤ 1 und −v + t ≤ 1
v − t ≤ 1 ⇔ v − 1 ≤ t und −v + t ≤ 1 ⇔ t ≤ 1 + v
Z
∞
Z
∞
fZ (t, v − t)dt =
g(v) =
−∞
−∞
1
(1 + t(v − t)(t2 − (v − t)2 )1[−1,1] 1[v−1,v+1] dt
4
10
Daraus folgt für v > 2 gilt g(v) = 0 und ür v < −2 gilt g(v) = 0.
Für 0 ≤ v ≤ 2:
Z min{1,1−v}
Z 1+v
1
1
(1 + t(v − t)(t2 − (v − t)2 )dt =
(1 + t(v − t)(t2 − (v − t)2 )dt =
g(v) =
4
4
− max{−1,v−1}
−1
Z 1+v
1
1
(1 + v 3 t + 3v 2 t2 − 2vt3 )dt = (2 + x)
4
4
−1
Analog für −2 ≤ v ≤ 0
Z 1
1
1
g(v) =
(1 + t(v − t)(t2 − (v − t)2 )dt = (2 − x)
4
4
v−1
Insgesamt ergibt sich
1
4 (2 + x) 0 ≤ v ≤ 2
1
(2 − x) −2 ≤ v ≤ 0
g(v) =
4
0
|v| > 2
=⇒ φ(t) = E(eit(X+Y ) ) =
1
0
Z 2
1
1
eitz (2 + z)dz +
eitz (2 − z)dz =
4
4
−1
−2
0
Z 0
Z 0
Z 0
Z
1
1
1
1 0 itz
eitz dz +
eitz z dz +
eitz dz −
e z dz =
2 −2
4 −2
2 −2
4 −2
Z
Z 0
Z 2
1 2 −2it
1 0 itz
1 2 −2it
1 itz
1 itz
e dz +
e
−
e z dz −
e
−
e z dz =
2 −2
4 it
4 it
−2 it
0 it
Z
eitz g(z)dz =
Z
e2it − e−2it e−2it 1 − e−2it e2it e−2it − 1
+
−
−
+
=
2it
2it
(2it)2
2it
(2it)2
sin(t) 2
(eit − e−it ) 2
(
) =(
) = φ1 (t)φ2 (t)
2it
t
2.5
Unabhängigkeit von Zufallsvariabeln in Verbindung mit der
Momentenerzeugenden Funktion
Definition 2.10. (Momentenerzeugende Funktion) Sei X eine Zufallsvariable auf einem Wahrscheinlichkeitsraum (Ω, F, P). Die Funktion
M(t) = E(etX ) t ∈ R oder C
sofern dieser Erwartungswert auf der rechten Seite existiert.
Satz 2.11.
Vor.: X1 , X2 unabhängige Zufallsvariabeln, M1 , M2 ihre Momentenerzeugenden Funktionen und M sei die Momentenerzeugende Funktion von X1 + X2 .
Beh.: Dann gilt M(t) = M1 (t)M2 (t).
11
Analog zur charakteristischen Funktion, können wir uns nun wieder folgende Frage stellen: Seien M1 , M2 , M die Momentenerzeugenden Funktionen von X1 , X2 und X1 + X2 und es gilt
M(t) = M1 (t)M2 (t), impliziert dies, dass X1 und X2 unabhängig sind? Folgendes Beispiel soll
uns eine Antwort auf die Frage liefern.
Beispiel 2.12. Sei (X,Y) ein diskreter Zufallsvektor
1
2
3
1
2
18
1
18
3
18
2
3
18
2
18
1
18
3
1
18
3
18
2
18
Y
X
Daraus folgt
P (X = 1) = P (X = 2) = P (X = 3) =
1
1
u. P (Y = 1) = P (Y = 2) = P (Y = 3) =
3
3
Das heißt X und Y sind identisch verteilt. Für die Bilder von Z := X + Y gilt dass sie in
{2, 3, 4, 5, 6}.
P (Z = 2) = P (X = 2 − Y ) =
X
P (X = k, Y = 2 − k) = P (X = 1, Y = 2 − 1) =
y∈1,2,3
1
9
analog kommt man auf die anderen Wahrscheinlichkeiten der Bilder von Z, nämlich 29 , 39 , 29 , 19 .
Da X und Y identisch verteilt sind gilt für die Momentenerzeugenden Funktionen:
1
MX (t) = MY (t) = E(exp(zY )) = (exp(z) + exp(2z) + exp(3z))
3
Da für die Momentenerzeugende für Z gilt:
1
MZ (t) = E(exp(zZ)) = (exp(2z) + 2 exp(3z) + 3 exp(4z) + 2 exp(5z) + exp(6z))
9
Folgt insgesamt MX (t)MY (t) = MZ (t) aber X und Y sind nicht unabhängig da
P (X = 1, Y = 2) =
2.6
1
1
6= = P (X = 1)P (Y = 2)
18
9
Diskrete Zufallsvariabeln, welche unkorreliert aber nicht
unabhängig sind
Definition 2.13. (unkorreliert) Zwei integrierbare Zufallsvariabeln X u. Y , mit XY ebenfalls
integrierbar, heißen unkorreliert, wenn Cov(X, Y ) = 0.
12
Es ist bekannt, dass, wenn X und Y integrierbar und unabhängig sind, dann sind sie unkorreliert. Jedoch ist die Eigenschaft der Unkorreliertheit schwächer als die der Unabhängigkeit.
Beispiel 2.14. Sei η eine diskrete Zufallsvariable mit den Werten {0, π2 , π}, die jeweils mit
Wahrscheinlichkeit 31 angenommen werden.
X = sin(η), Y = cos(η) Es gilt:
1
π 1
1
1
E(X) = sin(0) + sin( ) + sin(π) =
3
2 3
3
3
π 1
1
1
E(Y ) = cos(0) + cos( ) + cos(π) = 0
3
2 3
3
1
π
π 1
1
E(XY ) = sin(0)cos(0) + sin( )cos( ) + sin(π)sin(π) = 0
3
2
2 3
3
=⇒ X, Y unkorreliert, da Cov(X, Y ) = E(XY ) − E(X)E(Y ). Aber X und Y sind funktionell
abhängig da
X2 + Y 2 = 1
und daher nicht unabhängig.
2.7
Stetige Zufallsvariabeln, welche unkorreliert aber nicht unabhängig sind
Es gilt auch für stetige verteilte Zufallsvariabeln, dass Unabhängigkeit eine stärkere Eigenschaft
ist, als Unkorreliertheit.
Beispiel 2.15. X ∼ N (0, 1) und Y := X 2 − 1. Es gilt E(X) = 0 und da sich der 3. Moment von einer N (µ, σ 2 ) Zufallsvariable V ausrechnen lässt durch
E(V 3 ) = µ3 + 3µσ 2
gilt:
E(XY ) = E(X 3 ) − E(X) = 0
Damit sind X und Y unkorreliert, aber nicht unabängig.
2.8
E(Y |X) = E(Y ) impliziert nicht die Unabhängigkeit von X
und Y
Wir kommen nun zum Thema bedingter Erwartungswert. Es gilt folgende Aussage:
Satz 2.16.
Vor.: Y ist eine Zufallsvariable mit existierenden Erwartungswert auf einem Wahrscheinlichkeitsraum (Ω, F, P), A Subsigmaalegbra und σ(Y ) ist unabhängig von A
Beh.: Es gilt E(Y |A) = E(Y ).
Die Frage ist nun ob auch die umgekehrte Aussage gilt oder nicht.
Beispiel 2.17. Seien X und Z unabhängige intergrierbare Zufallsvariablen.X ist diskret und
13
nimmt mit positiver Wahrscheinlichkeit den Wert 1 und den Wert 2 an. Z ist symmetrisch um
0 mit P(Z = 0) < 1.
Z
X
Y :=
E(|Y |) = E(
|Z|
) ≤ E(|Z|) < ∞ =⇒ Y integrierbar.
|X|
Es gilt E(Z) = 0 da:
Z
∞
sym
Z
∞
−∞
Z
−∞
Z
xf (x)dx = −E(Z)
−∞
∞
−∞
∞
−xf (x)dx = −
zf (−z)dz = −
zf (z)dz =
E(Z) =
mit x := −z
dx
= −1 ⇔ dz = −dx
dz
=⇒ E(Z) = 0. Damit folgt
E(Y ) = E(
Z
1
) = E(Z) E( ) = 0
| {z } X
X
=0
Z
1
E(Y |σ(X)) = E( |σ(X)) = E(Z|σ(X)) = 0 =⇒ E(Y |σ(X)) = E(Y )
X
X
Damit gilt E(Y |X) = E(Y ) aber X und Y sind nicht unabhängig, da:
Annahme: X und Y sind unabhängig. Dann gilt für ein a > 0 beliebig:
P (Z > a, X = 1)
P (Y > a, X = 1)
=
= P (Z > a)
P (X = 1)
P (X = 1)
P (Y > a, X = 2)
P (Z > 2a, X = 2)
P (Y > a) = P (Y > a|[X = 2]) =
=
= P (Z > 2a)
P (X = 2)
P (X = 2)
=⇒ P (Z > a) = P (Z > 2a)
P (Y > a) = P (Y > a|[X = 1]) =
=⇒ P (a < Z < 2a) = P (Z > a) − P (Z > 2a) = 0
Da a > 0 beliebig war ist dies ein Widerspruch zu P (Z = 0) < 1. Damit ist gezeigt, dass die
Umkehrung im Allgemeinen nicht gilt.
2.9
Es gibt keine Beziehung zwischen bedingter Unabhängigkeit
und stochastischer Unabhängigkeit
Definition 2.18. Sei (Ω, F, P ) ein Wahrscheinlichkeitsraum, A, B ∈ F, P (B) > 0 Dann ist die
bedingte Wahrscheinlichkeit von A unter der Bedingung B definiert durch:
P (A|B) =
P (A ∩ B)
P (B)
14
Definition 2.19. (Bedingte Unabhängigkeit) Zwei Ereignisse A und B heißen bedingt unabhängig gegeben C mit P (C) > 0, wenn
P (A ∩ B|C) = P (A|C)P (B|C)
Intuitiv erwartet man vermutlich einen engen Zusammenhang zwischen der bedingten Unabhängigkeit und der stochastischen Unabhängigkeit. Die nächsten Beispiele zeigen, dass keines
der beiden das andere impliziert.
Beispiel 2.20. Seien X und Y unabhängige Bernoulli-verteilte Zufallsvariabeln mit p = 14 .
S := X + Y . Für S ∈ {0, 2} gilt X = Y = 0 oder X = Y = 1.
P (X = 1 ∩ Y = 1|S ∈ {0, 2}) =
P (X = 1, Y = 1, S ∈ {0, 2})
=
P (S ∈ {0, 2})
1
16
1
16
9
16
=
1
10
+
P (X = 1, S ∈ {0, 2}) P (Y = 1, S ∈ {0, 2})
P (X = 1|S ∈ {0, 2})P (Y = 1|S ∈ {0, 2}) =
=
P (S ∈ {0, 2})
P (S ∈ {0, 2})
1 1
16 16
1
9 2
( 16
+ 16
)
=
1
102
Das zeigt, dass P (A ∩ B) = P (A)P (B) nicht impliziert, dass P (A ∩ B|C) = P (A|C)P (B|C).
Beispiel 2.21. Seien X,Y und Z unabhängige, Bernoulli-verteilte ZV mit p = 13 .
Sei S3 := X + Y + Z, S2 = X + Y . Dann sind X und S nicht unabhängig da
P (X = 0, S3 = 3) = 0 6=
2 1
= P (X = 0)P (S3 = 3)
3 33
Aber für P (S2 = k) > 0 :
P (X = i, S3 = j, S2 = k)
P (X = i, Z = j − k, S2 = k)
=
=
P (S2 = k)
P (S2 = k)
P (X = i, S2 = k)
P (Z = j − k)
P (Z = j − k) = P (X = i|S2 = k)
P (S2 = k) =
P (S2 = k)
P (S2 = k)
P (S3 = j, S2 = k)
P (X = i|S2 = k)
= P (X = i|S2 = k)P (S3 = j|S2 = k)
P (S2 = k)
P (X = i, S3 = j|S2 = k) =
2.10
X,Y und X + Y Possion-verteilt implziert nicht dass X und
Y unabhängig sind
Definition 2.22. (Poisson-Verteilung)Eine Zufallsvariable X besitzt eine Poisson-Verteilung
mit Parameter λ (kurz: X ∼ P (λ) ), falls gilt:
P (X = k) = e−λ
λk
, k = 0, 1, 2 . . .
k!
15
Es gilt, wenn X und Y unabhängige Possion verteilte Zufallsvariabeln sind, dann ist die Summe
X + Y auch Possion verteilt. Die Frage ist ob man, wenn man weiß, dass X, Y und die Summe
X + Y Poisson verteilt sind darauf schließen kann, dass X und Y unabhängig sind? Im nächsten
Beispiel werden wir sehen, dass es im Allgemeinen nicht gilt.
Beispiel 2.23. Seien X und Y Possion-verteilte Zufallsvariabeln mit Parametern λ1 und λ2 .
Ihre Verteilungen sind gegeben mit {qi , i = 0, 1 . . . } und {rj , j = 0, 1 . . . } wobei
qi = P (X = i) und rj = P (X = j). Wir nehmen zwei Mengen A:={(0, 1), (1, 2), (2, 0)} und
B:={(0, 2), (2, 1), (1, 0}. Die gemeinsame Verteilung von X und Y ist definiert durch pij :=
P (X = i, Y = j)
qi rj + , (i, j) ∈ A
qi rj − , (i, j) ∈ B
pij =
qi rj
sonst
so dass 0 < || < min((i,j)∈ A∪B) qi rj
Zuerst zeigen wir, dass pij , i = 0, 1, . . . j = 0, 1, . . . eine zwei dimensionale diskrete Wahrscheinlichkeitsverteilung ist.
1. pij ≥ 0 folgt aus der Definition unseres 2.
X
i,j
pij =
X
(qi rj + ) +
(i,j)∈A
X
X
(qi rj − ) +
qi rj =
(i,j)∈A∪B
/
(i,j)∈B
X
qi rj =
i,j
X
qi
X
i
rj = 1
j
da qi und rj Verteilungen sind.
Außerdem gilt, dass X + Y Possion-verteilt ist da:
P (X + Y = k) = P (X = k − Y ) =
k
X
pk−y,y
y=0
Für k = 1
P (X + Y = k) = q1 r0 − + q0 r1 − =
k
X
qk−y ry
y=0
Für k = 2
P (X + Y = k) = q2 r0 + + q1 r1 + q0 r2 − =
k
X
qk−y ry
y=0
Für k = 3
P (X + Y = k) = q3 r0 + q2 r1 − + q1 r2 + + q0 r3 =
k
X
y=0
16
qk−y ry
Sonst:
P (X + Y = k) =
k
X
qk−y ry
y=0
Und es gilt:
k
X
y=0
qk−y ry =
k
X
y=0
−λ1
e
y
λk−y
−λ2 λ2
1
e
=
k − y!
y!
k
1
1 −(λ1 +λ2 ) X
k!
e
λk−y λy2 = e−(λ1 +λ2 ) (λ1 + λ2 )k
k!
(k − y)!i! 1
k!
y=0
Daraus folgt, dass X+Y Poisson verteilt ist mit Parameter λ1 + λ2 . Aber X und Y sind nicht
unabhängig da:
P (X = 0, Y = 1) = p01 = q0 r1 + 6= q0 r1 = P (X = 0)P (Y = 1)
17
Kapitel 3
Stochastische Prozesse
Im letzten Teil meiner Seminararbeit widme ich mich dem Thema Stochastische Prozesse.
Definition 3.1. (Stochastischer Prozess) Ein stochastischer Prozess X = (Xt t ∈ T ) ist eine
Familie von reellen Zufallsvariabeln, die auf einem Wahrscheinlichkeitsraum (Ω, F, P) definiert
sind.
X : (Ω × T) → Rn
(ω, t) 7→ Xt (ω)
Bemerkung: Die Menge T heißt Paramterraum des Prozesses X. Beliebte Wahlen dafür sind
N, Z oder R+ .
Definition 3.2. Die Abbildung t 7→ Xt (ω) nennt man Trajektorie oder Pfad. X heißt p-fs stetig
wenn alle Pfade p-fs stetig sind.
3.1
Ist es möglich einen Wahrscheinlichkeitsraum zu finden auf
dem jede beliebiger stochastischer Prozess definiert werden
kann?
Da es einen universalen Wahrscheinlichkeitsraum gibt, auf dem jede beliebige Zufallvariable
definiert werden kann (Ash 1972), stellt sich die Frage, ob es auch möglich ist einen Wahrscheinlichkeitsraum zu finden, auf dem jeder beliebiger stochastischer Prozess definierbar ist.
Beispiel 3.3. Angenommen es gäbe einen. Sei (Ω, F, P) dieser ein Wahrscheinlichkeitsraum.
Wähle |T| > |F|.
X = (Xt t ∈ T ), Xt ´s sind unabhängig
P (Xt = 0) = P (Xt = 1) = 1/2
=⇒ ∃t1 6= t2 , t1 , t2 ∈ R mit P (ω : Xt1 = Xt2 ) = 1
Dann gilt aber:
1/2 = P (Xt1 = 1) = P (Xt1 = 1, Xt2 = 1) = P (Xt1 = 1)P (Xt2 ) = 1/4
Wir haben also gesehen, dass F mindesten gleichviele Elemente besitzen muss wie T .
18
3.2
Beziehung zwischen Modifikation und ununterscheidar
Definition 3.4. Seien X = (Xt , t ∈ T) und Y = (Yt , t ∈ T) zwei stochastische Prozesse auf
dem selben (Ω, F, P ) mit dem selben Bildbereich (E, E). Dann heißt X eine Modifikation von Y
wenn
∀t ∈ T : P (ω : Xt (ω) = Yt (ω)) = 1
Definition 3.5. (Ununterscheidbar ) Seien X = (Xt , t ∈ T) und Y = (Yt , t ∈ T) zwei stochastische Prozesse auf dem selben (Ω, F, P ) mit dem selben Bildbereich (E, E). Dann heißen X und
Y ununterscheidbar wenn
[
P(
: Xt (ω) 6= Yt (ω)) = 1
t∈T
Bemerkung: Man kann zeigen, dass wenn T abzählbar ist, X und Y ununterscheidbar sind
genau dann, wenn Y eine Modifikation von X ist.
Das folgende Beispiel zeigt aber, dass Unterschiede zwischen den Definitionen auftreten können
wenn T überabzählbar ist.
Beispiel 3.6. Sei (Ω, F, P ) ein Wahrscheinlichkeitsraum Ω = [0, 1], F = B([0, 1]) und T = [0, 1].
τ sei eine auf [0,1]-gleichverteilte Zufallsvariable und
X=(Xt , t ∈ T) und Y = (Yt , t ∈ T), zwei stochastische Prozesse mit Xt (ω) = 0 und
Yt = 1τ =t (ω)t ∈ T.
Dann gilt:
∀t ∈ T : P (ω : Xt (ω) 6= Yt (ω)) = P (τ = t) = 0
Also ist Y eine Modifikation von X, aber X und Y sind ununterscheidbar da
[
P(
: Xt (ω) 6= Yt (ω)) = P ([0, 1]) = 1 6= 0
t∈T
3.3
Stochastische Prozesse, die Modifikationen voneinander sind
und trotzdem verschiedene Eigenschaften besitzen
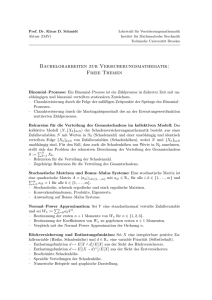
Beispiel 3.7. X=(Xt , t ∈ T) und Y = (Yt , t ∈ T), zwei stochastische Prozesse und τ ≥ 0 eine
Zufallsvariable mit stetiger Verteilung,
Xt (ω) = 1[τ (ω)≤t] (ω) und Yt (ω) = 1[τ (ω)<t] (ω), X0 = Y0 = 0
Dann sind X und Y Modifikationen voneinander da:
P (ω : Xt (ω) 6= Yt (ω)) = P (ω : τ (ω) = t) = 0
Aber wenn wir uns die Pfade der zwei stochastischen Prozesse ansehen, bemerken wir dass X
rechtsstetig ist und Y hingegen linksstetig.
19
Abbildung 3.1: Trajektorie von X, mit τ (ω) = τ0
Abbildung 3.2: Trajektorie von Y, mit τ (ω) = τ0
3.4
Stetigkeit des stochastischen Prozess impliziert nicht die
Stetigkeit der natürlichen Filteration
Sei X=(Xt , t ∈ T) dann heißt die Familie (Ft , t ≥ 0) wobei Ft := σXs , s ≤ t die natürliche
Filteration. Um über die Stetigkeit von Filterationen zu diskutieren, müssen wir den Begriff
Stetigkeit für Filterationen zuerst einmal definieren.
Definition 3.8. Der rechte Grenzwert einer Filteration
T ist definiert durch Ft+ :=
Eine Filteration heißt rechtsstetig wenn Ft = Ft+ = s>t Fs ∀t ≥
W 0.
Der linke Grenzwert einer Filteration ist definiert durch
W Ft− := s>t Fs .
Eine Filteration heißt rechtsstetig wenn Ft = Ft+ = s>t Fs ∀ t ≥ 0.
Sie heißt stetig genau dann wenn sie rechts- und linksstetig ist.
T
s>t Fs .
Die Frage, die wir uns nun stellen ist, ob man behaupten kann, dass die Stetigkeit des stochastischen Prozess die Stetigkeit der natürlichen Filteration impliziert. Folgendes Beispiel widerlegt
aber diese Behauptung.
Beispiel 3.9. Ω = [0, 1], F = B([0, 1]) und das Lebesgue-Maß λ.
Wähle h ∈ C ∞ (R+ ) und zwar so dass h(x) = 0, x ∈ [0, 21 ], h(x) > 0, sonst und h(x) streng
20
monoton wachsend auf [ 21 , ∞).
X = (Xt , t ∈ T) wobei
Xt (ω) := ωh(t), ω ∈ Ω, t ≥ 0
Dann gilt, dass die Pfade von X stetig sind (Zusammensetzung stetiger Funktionen), somit ist
X stetig. Aber Ft := σ(Xs , s ≤ t) ist {∅, Ω} für t ∈ [0, 12 ], da Xt für t ∈ [0, 12 ] konstant 0 ist und
B für t ∈ [ 21 , ∞), da h(t) und somit Xt streng monoton wachsend ist für ω > 0. Das impliziert
aber das Ft nicht stetig ist, da F 1 + = B und F 1 = {∅, Ω} ist.
2
2
21
Literaturverzeichnis
Grill, Karl (2011): Theorie Stochastischer Prozesse. Institut für Statistik und Wahrscheinlichkeitstheorie (TU Wien) – Vorlesungsskript
Kredler, Christian (2003): Einführung in die Wahrscheinlichkeitsrechnung und Statistik.
Technische Universität München – Vorlesungsskript
Kusolitsch, Norbert (2014): Maß- und Wahrscheinlichkeitstheorie. 2. Auflage. Springer
Spektrum
Stoyanov, Jordan M. (2013): Counterexamples in Probabilities. 3. Auflage. Dover Books
22