UR:BAN KAB Übersicht
Werbung

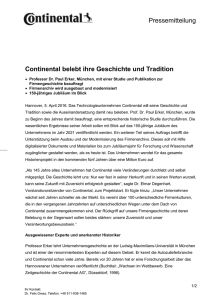
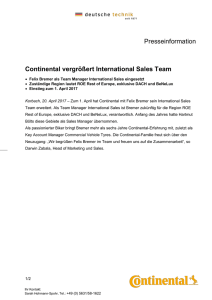
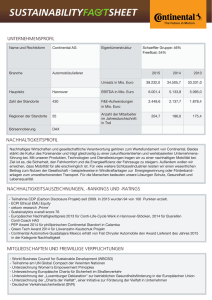
UR:BAN KAB Übersicht KAB – Kollisionsvermeidung durch Ausweichen und Bremsen Zielsetzung Unfallvermeidung in städtischer Umgebung durch situationsspezifische Kombination von Brems- und Lenkeingriffen. Motivation und Anwendungsfelder Fokus von Fahrerassistenzsystemen lag bisher auf Verkehrssituationen außerhalb der Stadt, jedoch geschehen vor allem innerorts relativ viele Unfälle mit Personenschaden. KAB unterstützt den Fahrer, wenn es in der aktuellen Verkehrssituation aufgrund von Unachtsamkeit oder Auftreten eines plötzlichen Ereignisses zwangsläufig zu einer Kollision kommen würde. Nutzenszenarien und Versuchstechnik Das KAB-System erfasst die Verkehrsteilnehmer im Umfeld des Fahrzeugs und die Fahrbahninfrastruktur. Wird eine drohende Kollision erkannt, reagiert die KAB-Funktion mit einem kurzzeitigen, automatischen Eingriff in Bremse und/oder Lenkung, so dass die Gefahr entschärft wird. Distanz zum Objekt Funktionsweise Unfallvermeidung durch Bremsen und Lenken möglich Ausweichen Bremsen Kollision nicht vermeidbar Geschwindigkeit Aktueller Status • Gemeinsame KAB-Funktionsspezifikation erstellt • Versuchsfahrzeuge aufgebaut • KAB-Szenarien zur Funktionsentwicklung in Simulationsumgebung implementiert Nächste Schritte • Weiterentwicklung und prototypische Umsetzung der partnerspezifischen KAB-Funktionsausprägungen • Test und Validierung der Wirksamkeit sowie der Akzeptanz der KAB-Funktionen Partner: • Adam Opel AG • Continental Teves AG & Co. oHG • AUDI AG • Volkswagen AG • Continental Safety Engineering International GmbH Vernetzung mit anderen UR:BAN-Teilprojekten Teilprojekt KAB – Kollisionsvermeidung durch Ausweichen und Bremsen Ziel Status Gemeinsame Erarbeitung einer Warn- und Eingriffsstrategie für KAB • Anforderungen seitens KAB definiert MV-MMI • Generische MMI-Strategie erarbeitet • Umsetzung eines KAB-MMI-Konzepts im DLR-Simulator MV-VIE I Übernahme von Modulen zur Fahrerintentionserkennung und -prädiktion • Anforderungen abgestimmt Kontrollierbarkeit der KAB- Funktion durch den Fahrer absichern • KAB-Systemspezifikation und Szenarienkatalog an KON übergeben MV-KON • Teilnahme am KON-Expertenkreis durch KAB-Vertreter Entwicklung von Modulen zur Umgebungserfassung und Situationsanalyse • Szenarienspezifische Herleitung der KABAnforderungen an UEM kommuniziert Abstimmung hinsichtlich Nutzenszenarien und Eingriffsstrategie • Funktionsschwerpunkte abgestimmt • Spezifikationen abgestimmt KA-SQL KAB-Funktion auch bei aktiver kontinuierlicher Quer- und Längsführung • Unfallanalyse durchgeführt und Wirkfeld von möglichen KAB-Ausprägungen ermittelt KA-WER Wirkfeld- und Effektivitätsanalyse für KAB sowie Diskussion rechtlicher Aspekte KA-UEM KA-SVT Partner: • Adam Opel AG • Continental Teves AG & Co. oHG • AUDI AG • Volkswagen AG • Continental Safety Engineering International GmbH • Konzept zur Umfeldwahrnehmung und -repräsentation partnerspezifisch zusammen mit UEM erarbeitet • KA-Simulatorszenario abgestimmt • KA-Simulatorszenario abgestimmt • Rechtsworkshop: Klassifizierung der KAB Funktion und Identifizierung rechtlich relevanter Anforderungen Sichere Quer- und Längsführung in der Stadt SQL – Sichere Querund Längsführung in der Stadt Motivation und Ziele •ErhöhungderSicherheitimStraßenverkehrdurch innovativeStadt-Assistenzsysteme •SteigerungderKapazitätdesStraßennetzesdurchvoraus- schauendesundsituationsangepasstesFahrverhalten Quelle: Gerald Kempel, Wien Use Cases Erwartete Ergebnisse Fahrerunterstützung in städtischen Engstellen VermeidungvonKollisionenmit •stehendenHindernissen •VerkehrineigenerRichtung •Gegenverkehr Spurwechsel assistiert auf Fahrerkommando UnterstützungSpurwechseldurch •RundumsichtmitFreiraumerkennungaufNachbarfahrspuren •aktiveQuerführung Kontinuierliche Unterstützung KontinuierlicheUnterstützungdurch •UmgebungsabhängigeGeschwindigkeitsempfehlung •haptischesFeedbackamGaspedal Forschungsschwerpunkte •Szenarien-undFunktionsspezifikation •Versuchsträgeraufbau •SituationsabhängigeHandlungsstrategien •PrototypischeUmsetzung •Funktionserprobungund-bewertung Partner: •RobertBoschGmbH •DaimlerAG •ContinentalSafetyEngineeringInternationalGmbH •VolkswagenAG •ContinentalTevesAG&Co.oHG Engstellenassistent SQL – Sichere Querund Längsführung in der Stadt Motivation, Ziele, Kundennutzen Unterstützung in Engstellen im fließenden Stadtverkehr durch: Typische Nutzenszenarien: Engstellen verursacht durch … • Information über Abstand zu seitlichen Hindernissen und Breite einer vorausliegenden Durchfahrt • Aktiver Lenkeingriff beim Passieren/Überholen von: • stationären Hindernissen (parkende Fahrzeuge, Poller, Bordsteinkanten) • Verkehr in eigener Fahrtrichtung • Stationäre Hindernisse • Optional: Teilbremsung bei nicht passierbaren Durchfahrten Einfluss auf das Unfallgeschehen: • Adressierte Unfalltypen: Front-/Seitenkollisionen • Erwartete Wirksamkeit: Vermeidung/Schwereminderung, Fahrerentlastung und Steigerung der Aufmerksamkeit Umfelderfassung: • Verkehr in der eigenen Fahrtrichtung • Partnerspezifische Sensorkonfiguration: • Abdeckung Frontbereich: Stereo-Video, Fernbereichsradar • Abdeckung Seitenbereich: Mono-Video, Nahbereichsradare Lösungsansätze und Umsetzung Innenstadtszenarien erfordern Erweiterung bekannter Ansätze zur Umfeldrepräsentation >Objektliste: Bewegte Verkehrsteilnehmer > Belegungsgitter: Unstrukturiertes stehendes Umfeld Visualisierung Belegungsgitter und Fahrkorridor Front-Sensorik 3 1 4 3 1 Vorverarbeitung Sensordaten Umfeldrepräsentation 2 5 Situationsanalyse Seiten-Sensorik 2 4 5 3 Umfeldsensoren aller Partner Partner: • Robert Bosch GmbH • Continental Safety Engineering International GmbH • Continental Teves AG & Co. oHG • Volkswagen AG 4 5 Ansteuerung, Anzeige, Bremse und Lenkung Aktionsplanung Systemarchitektur des Engstellenassistenten Umgebungsabhängige Geschwindigkeitsempfehlung SQL – Sichere Querund Längsführung in der Stadt Motivation, Ziele und Kundennutzen •DemFahrerjederzeitvermitteln,wiedieLängs- geschwindigkeitangepasstwerdensollte •VorausschauendesenergieeffizientesFahren •HöheresSicherheitsgefühlfürunerfahreneundältere MenscheninurbanenBereichen Lösungsansätze und Umsetzung •AktivesGaspedalmiteinstellbarerRückstellkraft •ÄnderungderGaspedalkennlinie •KontinuierlicherhaptischerEingriff •SystemauslegungsowieAkzeptanzfrageuntersuchen •BeitragzursicherenundeffizientenkontinuierlichenLängsführungerproben •EngeZusammenarbeitmitdenTeilprojektenUrbanes FahrenundStadtgerechte MMI von UR:BAN-MV Beispiel-Szenarien Anpassung an Geschwindigkeitsbegrenzung Folgefahrt Engstelle •Fahrzeugfährt50km/haufgerader Stadtstraße •Fahrzeugfährthintereinem Vorderfahrzeug •geringeDurchfahrbreite > DemFahrerwirdübermitteltdie Geschwindigkeitsoanzupassen, dasssicheinausreichendgroßer AbstandzumVorausfahrzeugergibt. > DemFahrerwirdangezeigt,die Geschwindigkeitsituationsbedingt zureduzieren. •Verkehrszeichenmit30km/h > DemFahrerwirdübermittelt,dasser dasGaspedalzurücknehmensollte umdieGeschwindigkeitanzupassen. Partner: •ContinentalSafetyEngineeringInternationalGmbH •ContinentalTevesAG&Co.oHG •VolkswagenAG Gegenverkehrassistent SQL – Sichere Querund Längsführung in der Stadt Motivation, Ziele und Kundennutzen •VermeidungvonZusammenstößenmitentgegenkommendenFahrzeugenimStadtverkehr •KollisionsvermeidungmitstehendenFahrzeugenoderHindernissen Szenarien •StädtischeEngstellenmitGegenverkehr Lösungsansätze und Umsetzung •Engstellenassistentistaktiv •ZusätzlicheBeobachtungvonGegenverkehrmitRadarundStereokamera •BestimmungderWahrscheinlichkeit,dassDurchfahrenmöglichist d4 b1 d5 d3 b2 v1 d2 Fahrerunterstützung •AnzeigevonerkanntenEngstellenmitgleichzeitigem Gegenverkehr •WarnungundfallserforderlichBremseingriff,wennDurch- fahrbreitefürbeideFahrzeugezugering •UnterstützendesLenkmoment,fallsseitlicheKollisionbei DurchfahrteinerEngstellemitGegenverkehrdroht Partner: •ContinentalSafetyEngineeringInternationalGmbH •ContinentalTevesAG&Co.oHG v2 Spurwechselassistent SQL – Sichere Querund Längsführung in der Stadt Motivation Zielsetzung Entwicklung eines Spurwechselassistenten zur Unterstützung des Fahrers durch Längs- und Querführung für einen sicheren und komfortablen Spurwechsel in der Stadt Funktionsablauf Szenarien • Ausgangssituation: Längsregelung mit Spurhaltefunktion Spurwechsel auf vorausfahrendes Fahrzeug • Übergabe des Spurwechselwunsches durch Fahrer • System überprüft, ob Spurwechsel möglich ist • Spurwechsel mit Unterstützung durch Längsund Querregelung (Gas, Bremse, Lenkung) Spurwechsel vor einem Fahrzeug auf der Zielspur • Nach erfolgreichem Spurwechsel wird die Längsregelung mit Spurhaltefunktion fortgesetzt • Fahrer hat jederzeit die Möglichkeit, den Spurwechsel durch Betätigen von Gas, Bremse oder Lenkeingriff zu übersteuern Spurwechsel hinter einem Fahrzeug auf der Zielspur Vorgehensweise Entwicklung Funktion Spurwechselassistent: • Umfelderfassung und -repräsentation • Verhaltensentscheidung und Aktionsplanung • Situationsanalyse und -prädiktion • Längs- und Querregelung Partner: • Continental Safety Engineering International GmbH • Daimler AG • Continental Teves AG & Co. oHG • Volkswagen AG 14 % 36 % 2% Übersicht 9% 2% Getötete 2.2071 SVT – Schutz von schwächeren Verkehrsteilnehmern 7% EU Getötete 32.885 Getötete 96.6114 4% 14 % 4% 2% Getötete 33.3084 Getötete 3.648 2% 9% 3% Getötete Getötete6.872 2% 19 % 26 % 5.745 35 % 19 % Getötete 96.6114 28 % 13 % 7% EU Getötete 32.885 9% 18 % Getötete 34.2171, 2 39 % 18 % 5% Getötete 35.15534 % 6% 28 % 13 % 14 % 21 % Getötete 17.0033 Getötete 3.648 Getötete 5.505 16 % 13 % 27 % Getötete 14.9204 Getötete 105.9223 19 % 22 % 9% 2% Getötete 6.872 3% 2% 28 % Getötete 1.352 59 % 13 % Getötete 35.1553 39 % 5% BRIC-Staaten 17 % Getötete 14.9204 2% 2% Getötete Fahrradfahrer 1 Getötete Motorradfahrer NAFTA-Staaten 2009, 2 EU-24, 3 2006, 4 2007 BRIC-Staaten 1 2009, 2 EU-24, 3 2006, 4 2007 Zielsetzung Entwicklung kognitiver benutzergerechter Systeme zum wirksamen und vorausschauenden Schutz von schwächeren Verkehrsteilnehmern in der Innenstadt Erhöhung der Schutzwirkung der Systeme durch • Erweiterung der Nutzenfälle auf bisher nicht erfasste Unfallszenarien • Erhöhung der Effektivität und Robustheit der Systeme in den adressierten Unfallszenarien Szenarien / Use Cases Kollisionsvermeidung bei plötzlichem Auftauchen von schwächeren Verkehrsteilnehmern im Gefahrenbereich vor dem Fahrzeug sowie bei Unachtsamkeit des Fahrers Adressierte Unfallszenarien: • Frontalunfälle • Abbiegeunfälle 3% 20 % Getötete Fußgänger NAFTA-Staaten • Unfälle mit teilweiser Sichtverdeckung Geplante Ergebnisse Entwicklung und Evaluation der Schlüsseltechnologien zur robusten Gesamtfunktion eines Schutzsystems für schwächere Verkehrsteilnehmer: • Sensorbasierte Erkennung relevanter Verkehrsteilnehmer • Tieferes Situationsverständnis kombiniert mit objektspezifischer Verhaltensprädiktion • Situationsabhängige Handlungsstrategien zur Unfallvermeidung oder -folgenminderung (Bremsen und Ausweichen) Partner: • BMW Forschung und Technik GmbH • Continental Teves AG & Co. oHG • Robert Bosch GmbH • Daimler AG • Continental Safety Engineering International GmbH • MAN Truck & Bus AG 59 % 38 % 4% 10 % 20 % Getötete Fahrradfahrer Getötete Motorradfahrer Getötete 5.505 36 % Getötete 105.9223 9% 14 % 28 % 27 % 10 % 14 % Getötete 2.2071 18 % 38 % 13 % 18 % 21 % 6% 26 % 9% Getötete 34.2171, 2 Motivation Getötete Fußgänger 2% 19 % 13 % Getötete 17.0033 Getötet 5.745 Getötete 33.3084 14 % Getötete 1.352 1 Neue Szenarien adressieren SVT – Schutz von schwächeren Verkehrsteilnehmern Abbiegen Motivation •10%allerFußgängerunfällemitPersonenschadenereignen sichbeimAbbiegen •AbbiegeszenarienwerdenvonaktuellenSystemennicht adressiert Vorgehen •Umfelderfassungmitgroßem,lateralenSensorsichtbereich >Weitwinkel-undSeitenkameras •GenaueVorhersagederFahrzeugtrajektoriewährenddes gesamtenAbbiegevorgangs >kontextgestütztePrädiktiondesEgo-Fahrzeugsdurch EinbeziehungvonUmfeldmerkmalenundKartendaten Verdeckungen Motivation •Bei30%allerFußgängerunfällemitPersonenschadenerscheint FußgängerausVerdeckung •KannvonaktuellenSystemennurbegrenztadressiertwerden Vorgehen •SchnelleundzuverlässigeSituationserkennung •VerbesserungderKlassifikationvonteilverdecktenFußgängern Partner: •BMWForschungundTechnikGmbH •ContinentalTevesAG&Co.oHG •RobertBoschGmbH •DaimlerAG •ContinentalSafetyEngineeringInternationalGmbH •MANTruck&BusAG Besser Reagieren SVT – Schutz von schwächeren Verkehrsteilnehmern Absichtserkennung Ziel: Präzise Fußgänger und Radfahrer Trajektorien-Prädiktion (0.5 – 2 s) für eine verbesserte Situationsanalyse und höhere Systemschutzwirkung Posen- und Handlungserkennung Verwendung von Bewegungsmodellen Einbeziehung von Szenenkontext Detailanalyse Grundlage für Absichtserkennung: Erfassung von Detailmerkmalen aus der Umgebung, insbesondere der Fußgängerpose Ausrichtung Kopf Ausrichtung Torso Bewegungsrichtung Einzelanalyse von Kopf, Torso und Beine Erkennung der Gesamtpose Partner: • BMW Forschung und Technik GmbH • Continental Teves AG & Co. oHG • Robert Bosch GmbH • Daimler AG • Continental Safety Engineering International GmbH • MAN Truck & Bus AG Schutz durch Rundumsicht im Nutzfahrzeug SVT – Schutz von schwächeren Verkehrsteilnehmern Ziele •EntwicklungeinesMultikamerasystemsfürNutzfahrzeugezurEntlastungdesFahrers inkomplexenundunübersichtlichenSituationen •SchutzschwächererVerkehrsteilnehmerdurchoptimaleVisualisierungbisherschlechtoder nichteinsehbarerBereicheimFahrzeugumfeld Vorgehen •AnalysederhäufigstenUnfallursachen •IdentifikationnutzfahrzeugspezifischerFahrsituationen •Fahrerbefragung(inKooperationmitTeilprojektMMI) •GenerierungderfürjedeFahrsituationoptimalenAnsicht •PrototypischeUmsetzungineinemStadtbus Vernetzung Zusammenarbeit mit anderen Teilprojekten UEM SQL SVT KAB WER MMI SIM VIE KON KAB FunktionsauslegungKollisionsvermeidung UEM SensorikundUmfeldmodellierung SQL AbstimmungPrüfmethodikEffektivitäts-und Wirkanalyse WER Effektivitäts-undWirkanalyse MMI AuslegungMMIKomponenten VIE FahreraufmerksamkeitundFahrerreaktion KON AbsicherungSystemverhalten SIM Simulationsumgebung Partner: •BMWForschungundTechnikGmbH •ContinentalTevesAG&Co.oHG •RobertBoschGmbH •DaimlerAG •ContinentalSafetyEngineeringInternationalGmbH •MANTruck&BusAG Umgebungserfassung und Umfeldmodellierung UEM – Umgebungserfassung und Umfeldmodellierung Motivation Das Verstehen komplexer urbaner Verkehrssituationen erfordert neue, leistungsfähigere Methoden der Umgebungserfassung und aussagekräftige Modellierungen der Umwelt Randsteine Baustellen Engstellen Fußgänger Ampeln Zielsetzung • Verstehen komplexer innerstädtischer Situationen für alle UR:BAN-KA Applikationen • Entkopplung von Wahrnehmung und Funktionen durch generische Repräsentationen • Entwicklung einer fusionierten 360° Umgebungserfassung und applikationsübergreifender Umfeldmodellierung • Partnerübergreifendes Verständnis der Konzepte einer Umgebungserfassung für den sicheren Verkehr der Zukunft Generische Repräsentationen Bisherige Ergebnisse • Gemeinsames Glossar der Umfelderfassung • Umfeldrepräsentationen in Versuchsträgern integriert und heute erlebbar • Konzept der Entkopplung von Wahrnehmung und Funktionen bestätigt Partner: • AUDI AG • Continental Teves AG & Co. oHG • BMW Forschung und Technik GmbH • Daimler AG • Robert Bosch GmbH • Volkswagen AG Umfeldsensoren im Automobil UEM – Umgebungserfassung und Umfeldmodellierung Eingesetzte Sensoren Moderne Sensoren erlauben eine umfassende Wahrnehmung der Umgebung rund um das Fahrzeug. Sie ergänzen sich dank ihrer unterschiedlichen Fähigkeiten und Erfassungsbereiche. Redundanz erhöht zudem die Sicherheit für anspruchsvolle Anwendungen Radar Laserscanner • hohe Reichweite • feine Winkeltrennung • großer Öffnungswinkel • hohe Reichweite • witterungsrobust 360 ° Abdeckung der Fahrzeugumgebung Mono-Video Stereo-Video • Verkehrszeichen, Markierungen etc. • Klassifikation von Objekten • Detaillierte 3D-Messung im Nahbereich Partner: • AUDI AG • Continental Teves AG & Co. oHG • BMW Forschung und Technik GmbH • Daimler AG • Robert Bosch GmbH • Volkswagen AG Situationswahrnehmung UEM – Umgebungserfassung und Umfeldmodellierung Zielsetzung Im Rahmen der Situationswahrnehmung werden die funktionsrelevanten Situationsmerkmale basierend auf den Umfeldrepräsentationen extrahiert Scene Labeling Fahrpfade Zebrastreifen Kolonnen Hierarchische Fahrstreifenerkennung Frei-/Belegtraumextraktion Methodik Die Interpretation von Situationsmerkmalen erfolgt in den jeweiligen Funktionen anhand funktionsspezifischer Kriterien. Beispiel: „abgesenkter Bordstein“ Querführung im Fahrstreifen Ausweichen im Notfall Fazit • Komplexe urbane Szenarien sind durch die Erkennung von Situationsmerkmalen beschreibbar und damit maschinell interpretierbar • Für die Fahrerassistenz-Funktionen ist dies die Grundlage für mehr Sicherheit im urbanen Verkehr Partner: • AUDI AG • Continental Teves AG & Co. oHG • BMW Forschung und Technik GmbH • Daimler AG • Robert Bosch GmbH • Volkswagen AG Modelle und Fusion UEM – Umgebungserfassung und Umfeldmodellierung Zielsetzung Funktionsübergreifende Modellierung des Fahrzeugumfelds in urbaner Umgebung und Integration von Informationen unterschiedlicher Quellen Modellierung Entwicklung verschiedener Repräsentationen um eine umfassende Beschreibung der Umgebung zu erhalten Intervallkarte 3D Objektgrid Stixel 2D Grid Objekte Fusion • Gewinnung von Informationen höherer Qualität durch Nutzung der Messwerte mehrerer Sensoren mit diversitären Erfassungsbereichen und Eigenschaften • Aufbau eines durchgängigen konsistenten Umfeldmodells aus den verschiedenen eingesetzen Sensoren Typische Sensorsichtbereiche Ergebnis der Fusion Partner: • AUDI AG • Continental Teves AG & Co. oHG • BMW Forschung und Technik GmbH • Daimler AG • Robert Bosch GmbH • Volkswagen AG Das Teilprojekt: Wirkfeld, Effektivität, Recht (WER) WER – Wirkfeld, Effektivität, Recht Motivation •RelativanteilvonInnerortsunfällenmitPersonenschadensteigt •BegleitungdesEntwicklungsprozessesvonFahrerassistenzsystemenmitinnerortskomplexerwerdendenAnforderungen Zielsetzung •WirkfeldermittlungvonFahrerassistenzsystemen •EffektivitätsbewertungvonFahrerassistenzsystemen •RechtlicheEinordnungderindenApplikationsprojektenentwickeltenSysteme Datengrundlage: reale Unfälle 2. Nachweis des Nutzens (Effektivität) 1. Wirkfeldermittlung > GIDASDatenbankalsGrundlage fürdendeutschenMarkt > Bestimmungderpotenziell adressierbarenUnfälleeines bestimmtenSystemsinnerhalb vonGIDAS > Bestimmungdestatsächlichen NutzensdesSystemsinnerhalb desWirkfeldes > Feldeffektivitätsanalyse Wirkfeld GIDAS Unfalldatenbank Wirkfeld GIDAS Wirkfeld Nutzen Nutzen Arbeitsschwerpunkte •WirkfeldermittlungderinUR:BANundinsbesonderederinderProjektsäuleKognitiveAssistenz(KA) entwickeltenSystemeundBewertungdersog.Feldeffektivität(Poster:WirkfeldundEffektivität) •BetrachtungderinUR:BANentwickeltenSystemeausrechtlicherSicht(Poster:Recht) Bisherige Ergebnisse •Unfalldatenanalyse •AbbildungersterFunktioneninEffektivitäts-Software •ErmittlungWirkfelder(GIDAS) •ApplikationsbezogenerrechtlicherWorkshop Partner: •RobertBoschGmbH •BundesanstaltfürStraßenwesen(BASt) •VolkswagenAG WER: Recht WER – Wirkfeld, Effektivität, Recht Motivation •AufzeigenderrechtlichenRahmenbedingungenfür dieEntwicklungderFahrzeugautomatisierung •IdentifizierungderrechtlichenHindernisse fürdieMarkteinführung •RechtskonformeFunktionsausgestaltung •warnender/informierenderSysteme •kontinuierlichwirkenderSysteme •Notfallsysteme Arbeitsschwerpunkte •DurchführungeinesapplikationsbezogenenRechtsworkshops •IdentifikationspezifischerAnforderungendertechnischen Ausgestaltungnachdem • Produkthaftungsrecht • Verhaltensrecht •DefinitorischeEinordnungautomatisierterFunktionen inKategorienderAutomatisierung •IdentifizierungrechtlichrelevanterAspektederNotfallsysteme •RelevanzderKontrollierbarkeit Bisherige Ergebnisse •RechtlicheBewertungderApplikationenSQL,SVTundKAB •InputfürdieEntwicklungundMarkteinführung derApplikationen •AnalyseproblematischerRechtsfragenunterdem GesichtspunktderFahrzeugtypengenehmigung Partner: •BundesanstaltfürStraßenwesen(BASt) WER: Wirkfeld und Effektivität WER – Wirkfeld, Effektivität, Recht Vorgehen WER-Toolkette 1. Ausgangsituation „ohne System“: Unfallgeschehen innerorts 2. Fallauswahl durch Auswahl potentiell adressierbarer Unfälle 3. Abbildung des Fahrerassistenzsystems 4. Virtuelle Simulation „mit System“: verändertes Unfallgeschehen 5. Bewertung des Nutzens des Systems als Vergleich zwischen Ausgangssituation „ohne System“ und virtueller Simulation „mit System“ & verringerte Verletzungsschwere Systemkonfiguration Sensor Algorithmus rateEFFECT 3 Fahrermodell Aktor Verletzungsrisikofunktion 4 PC-Crash PC-Crash PC-Crash Konzept-, Modell- und Realalgorithmen 2 Deutsches Unfallgeschehen GIDAS PreCrash-Matrix Aktuelles Sicherheitsniveau 5 Wirkfeld 1 Auswertung 1830 Berechnete Unfälle (Wirkfeld) 739 8% Konzept-, Modell- und Realalgorithmen 1091 1,75% Adressierte Unfälle Beeinflusste Unfälle Nicht beeinflusste Unfälle Schritte 1-2 der WER-Toolkette: Definition der Aktionsräume von verschiedenen FAS-Varianten mit anschließender Potentialbewertung anhand des Unfallgeschehens: Geschwindigkeitsbereich (pot. Unfallgegner) bis 30 km/h 30-50 km/h 50 bis 70 km/h bis 30 km/h x x x x x x x x Variante 2 Geschwindigkeitsbereich (EGO-Fahrzeug) 2. Analyse Unfallgeschehen innerorts Variante 1 1. Beschreibung Wirkbereiche von FAS-Varianten 30-50 km/h 50 bis 70 km/h 3. Wirkfeld Wirkfeldbetrachtung in UR:BAN WER • SVT: Analyse von Szenarien für Fußgänger und Radfahrer bzw. funktionsrelevante Charakteristika • KAB: Abgrenzung von Unfällen, in denen Ausweichen oder Bremsen zur Kollisionsvermeidung möglich ist • SQL: Analyse urbaner Abkommens- und Längsverkehrsunfälle – zusätzlich: Fahrerentlastung Partner: • Robert Bosch GmbH • Bundesanstalt für Straßenwesen (BASt) • Volkswagen AG Unfallszenarien Gemeinsames Unfallgeschehen – drei Analyseansätze SQL KAB SVT Fahrsituation Kollision UR:BAN Teilprojekte: SVT – Schutz von schwächeren Verkehrsteilnehmern KAB – Kollisionsvermeidung durch Ausweichen und Bremsen SQL – Sichere Quer- und Längsführung