Modellmessungen und Simulationsrechnungen zur - Linac-AG
Werbung

Modellmessungen und
Simulationsrechnungen zur
Optimierung der supraleitenden
CH-Struktur
D IPLOMARBEIT
vorgelegt beim
Fachbereich Physik
der
Goethe Universität
Frankfurt am Main
von
M ARCO B USCH
28. August 2009
Inhaltsverzeichnis
Inhaltsverzeichnis
1 Einleitung & Motivation
1.1 Entwicklung der Linearbeschleuniger
1.2 Internationale Großprojekte . . . . . .
1.2.1 IFMIF . . . . . . . . . . . . . . .
1.2.2 EUROTRANS . . . . . . . . . .
2 Supraleitung
2.1 Das Phänomen der Supraleitung . . .
2.2 Grenzen supraleitender Beschleuniger
2.2.1 Restwiderstand . . . . . . . . .
2.2.2 Multipacting . . . . . . . . . .
2.2.3 Thermaler Zusammenbruch . .
2.2.4 Feldemission . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
6
14
14
15
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
19
19
27
27
29
29
30
3 Resonatorkenngrößen
3.1 Die Güte . . . . . . . . . . . . . . . . . . . .
3.2 Die Verlustleistung . . . . . . . . . . . . . .
3.3 Beschleunigungsspannung und Gradient .
3.4 Die Impedanz . . . . . . . . . . . . . . . . .
3.5 Die gespeicherte Energie W . . . . . . . . .
3.6 Der R/Q - Wert . . . . . . . . . . . . . . . .
3.7 Der Geometriefaktor G . . . . . . . . . . . .
3.8 Elektrische und magnetische Spitzenfelder
3.9 Der Oberflächenwiderstand Rs . . . . . . .
3.10 Die kryogene Last R a Rs . . . . . . . . . . .
3.11 Skalierung der Parameter . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
31
31
32
33
34
35
35
35
36
37
38
38
4 H-Moden Theorie
4.1 Die IH-Struktur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Die CH-Struktur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
45
46
5 Der supraleitende CH-Prototyp
49
6 Simulationsrechnungen
6.1 Veränderung der Girdergeometrie . . . . . . . . . . . . . . . . . . . .
6.2 Die Stützengeometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
53
56
.
.
.
.
.
.
.
.
.
.
.
.
1
Inhaltsverzeichnis
6.3
6.4
Untersuchung der Driftröhren . . . . . . . . . . . . . . . . . . . . . . .
Untersuchung der Endzellengeometrie . . . . . . . . . . . . . . . . . .
57
59
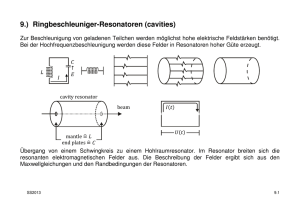
7 HF-Einkopplung
7.1 Induktive Kopplung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Kapazitive Kopplung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Numerische Bestimmung von Qe . . . . . . . . . . . . . . . . . . . . .
61
62
63
63
8 Messungen am Kupfermodell
8.1 Frequenztuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Messung verschiedener Feldverteilungen . . . . . . . . . . . . . . . .
8.3 Bestimmung der externen Güte . . . . . . . . . . . . . . . . . . . . . .
67
68
69
73
9 Ausblick
77
Tabellenverzeichnis
81
Abbildungsverzeichnis
83
Danksagung
87
Literatur
89
2
1 Einleitung & Motivation
Die Anforderungen an Beschleunigerstrukturen haben in jüngster Vergangenheit
aufgrund der immer höheren Teilchenenergien und vor allem der ständig wachsenden Strahlintensitäten dazu geführt, dass sich der Linearbeschleunigerbereich
zu einem regen Forschungsgebiet entwickelte. Neben den klassischen Anwendungen zur Entdeckung neuer Teilchensorten in Forschungsanlagen wie am CERN,
DESY oder FERMILAB, wo Linearbeschleuniger als Injektoren eingesetzt werden,
oder großen Linearcollidern wie am SLAC (Stanford Linear Acclerator Center),
werden Resonatoren vermehrt für angewandte/industrielle Zwecke verwendet,
z.B. zur Isotopenproduktion (FRIB, Spiral2, GSI, SARAF), Materialforschung (IFMIF), Neutronenforschung (SNS) oder in der Medizin (Strahlentherapie, HICAT
in Heidelberg). Gerade im Nieder- und Mittelenergiesegment (3-100 MeV/u) gibt
es eine Vielzahl an unterschiedlichen Strukturen. Der jeweilige Einsatz wird durch
die Rahmenbedingungen des Projekts bestimmt. Für Anwendungen, die eine hohe
Effizienz, Spannungsfestigkeit und Betriebssicherheit erfordern, hat sich die IHStruktur (Interdigital H-Mode, s. Kap. 4.1) seit geraumer Zeit erfolgreich etabliert
[1]. Die Weiterführung dieses Konzepts auf höhere Frequenzen und Teilchengeschwindigkeiten wurde mit der Entwicklung der CH-Struktur (Crossbar H-Mode,
s. Kap 4.2) realisiert. Diese besitzt bei gleicher Frequenz ca. die doppelten Querabmessungen einer IH und ist damit auch für moderne Protonenbeschleuniger attraktiv. Darüber hinaus zeichnet sie sich durch eine hohe mechanische Stabilität
aus, was die Möglichkeit zu einem supraleitenden Betrieb ermöglicht. Mit der sogenannten KONUS-Strahldynamik (KOmbinierte NUll Grad Struktur) [1] können
in einer CH-Struktur lange, linsenfreie Sektionen erzielt werden, um die Länge des
Beschleunigers weiter zu verkürzen. Am IAP wurde bereits ein 19-zelliger, supraleitender CH-Prototyp entwickelt, gebaut und erfolgreich getestet (Kap. 5)[2, 3]. Die
vorliegende Arbeit beschäftigt sich mit dem Optimierungsprozess einer supraleitenden CH-Struktur für hohe Leistungen. In diesem Kontext wird mit hohen Leis-
3
1 Einleitung & Motivation
tungen Bezug genommen auf die Strahlleistung aktueller, geplanter Projekte wie
IFMIF (10 MW) oder EUROTRANS (2.4 MW). In beiden Fällen müssen die Kavitäten mit bis zu 500 kW HF-Leistung im Dauerstrichbetrieb versorgt werden. Das
erste Kapitel widmet sich der Historie der Linearbeschleuniger, angefangen bei den
statischen Maschinen über die ersten Hochfrequenz-betriebenen Beschleuniger bis
hin zu gegenwärtigen Strukturen. Den Abschluss bildet ein kurzer Abriss über die
oben genannten Projekte IFMIF und EUROTRANS.
Im zweiten Kapitel werden Grundlagen der Supraleitung thematisiert. Makroskopische Phänomene werden erläutert und mikroskopische Ansätze skizziert. Des
Weiteren sollen die Limitierungen von Resonatoren im supraleitenden Betrieb erwähnt werden.
Das anschließende Kapitel handelt von den fundamentalen Kenngrößen einer Kavität, die zur Analyse und zum Vergleich verschiedener Strukturen unerlässlich
sind, sowie von deren Skalierung bei Veränderung der transversalen Dimensionen.
Darauf folgt ein Abschnitt über die Theorie der H-Modenbeschleuniger. Es werden
sowohl die HF-Eigenschaften der IH- und CH-Struktur vermittelt als auch deren
Vorteile gegenüber anderen Strukturen erläutert. Als nächstes werden die wichtigsten Simulationsergebnisse im Zusammenhang mit dem supraleitenden CH-Prototyp
vorgestellt. Ebenso kommen hierbei die erzielten Messergebnisse vor.
Auf Basis des Prototyps bauen die Optimierungen der CH-Kavität für hohe Leistungen auf. Die Simulationen legen den Schwerpunkt auf Peakfeldoptimierung
und Tunebarkeit. Weiterhin werden verschiedene Konzepte zur Homogenisierung
der Feldverteilung überprüft sowie eine Abschätzung der nötigen Einkopplerlänge für verschiedene Koppelstärken durchgeführt. Ein weiterer Abschnitt gilt den
Einkopplungsmethoden von HF-Leistung in eine Kavität. Die Einkoppelmöglichkeiten induktiv und kapazitiv werden diskutiert und numerische Verfahren zur Ermittlung der externen Güte aufgezeigt. Für die Validierung der Simulationsergebnisse wurde ein Kupfermodell in der Werkstatt des IAP angefertigt. In Puncto Geometrie und transversalen Abmessungen ist es stark an einem zukünftigen supraleitenden Resonator orientiert. Der Tank ist modular aufgebaut und kann für weitere
Forschungszwecke leicht modifiziert und ausgebaut werden. Die Messergebnisse
und Vergleiche mit der Simulation werden am Ende dieses Kapitels zusammengestellt. Abschließend wird ein kurzer Blick auf die kurz vor der Fertigungsphase
befindliche, nächste supraleitende CH-Struktur geworfen. In deren Design fließen
viele Anregungen aus dieser Arbeit mit ein, und es kommen noch einige tech-
4
nische Neuerungen hinzu. Die ersten möglichen Anwendungen für supraleitende CH-Strukturen bestehen im GSI UNILAC (gepulst) sowie dem GSI SHE-Linac
(Dauerstrich), an denen erstmals eine CH-Struktur auch mit Strahl getestet werden
kann.
5
1 Einleitung & Motivation
1.1 Entwicklung der Linearbeschleuniger
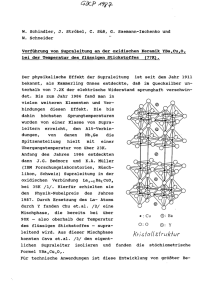
Die technologischen Entwicklungen bis zu der hier behandelten CH-Struktur reichen bis in die 20er Jahre des vergangenen Jahrhunderts zurück. Anfänglich beschleunigte man Teilchen mit statischen Beschleunigern. Hierbei wurden die aus
einer Quelle gewonnenen Teilchen (Elektronen aus einer Glühkathode bzw. Protonen/Ionen aus einem Plasma) mittels des elektrischen Feldes, das zwischen 2 unterschiedlich geladenen Elektroden erzeugt wird, in einem Vakuumrohr beschleunigt, um anschließend auf ein Target zu treffen.
Abbildung 1.1: Elektrostatischer Beschleuniger [4].
Die maximal erreichbare Energie ist dabei jedoch durch die angelegte Spannung limitiert. Um die Maximalspannung und somit auch die Energie zu erhöhen, wurden
anfang der 30er Jahre verschiedene Ansätze entwickelt, wie z.B. Kaskadenschaltungen bestehend aus Kondensatoren / Dioden (Cockroft-Walton-Generator) oder aus
Kondensatoren / Widerständen / Funkenstrecken (Marx-Generator).
(a) Cockroft-WaltonGenerator.
(b) Marx-Generator.
Abbildung 1.2: Kaskaden-Generatoren [4].
6
1.1 Entwicklung der Linearbeschleuniger
Bei Ersterem wird eine Wechselspannung angelegt und über Gleichrichter-Dioden
gewährleistet, dass nur der positive Beitrag der Spannung zum darauffolgenden
Kondensator durchgelassen wird. Auf diese Weise kann bei einer n-stufigen Kaskade und einer Ausgangsspannung U0 eine Endspannung von 2nU0 erzielt werden[5].
Diese Art von Beschleunigern konnte bis zu 4 MV Spannung erreichen.
Ein Marx-Generator lädt via Hochspannung parallel geschaltete Kondensatoren
auf, bis die Zündspannung der Funkenstrecken erreicht ist, und somit der Strom
sich in einem sehr kurzen, aber intensiven Puls über die nun in Reihe befindlichen
Kondensatoren entlädt.
So lässt sich eine Potentialdifferenz von Uges = nU erzielen (mit n = Anzahl der
Kondensatoren). Der stärkste Marx-Generator lieferte 1932 ca. 6 MV [6].
Eine weitere Ausbaustufe der statischen Hochspannungsgeneratoren bildete der
Van de Graaff-Beschleuniger, den R.J. Van de Graaff 1930 entwickelte [7].
Abbildung 1.3: Van de Graaff-Beschleuniger.
Die Ladungsträger der angelegten Spannung werden durch eine spitze Elektrode
auf ein isolierendes, elektrisch angetriebenes Band aufgetragen und anschließend
zu einer metallischen Hohlkugel geleitet. Diese lädt sich dadurch so weit auf bis
die Grenzspannung erreicht ist und das Potenzial für den eigentlichen Teilchenbeschleuniger nutzbar gemacht werden kann. Unter der Voraussetzung eines guten
Vakuums können mit diesem Prinzip Spannungen über 10 MV realisiert werden.
Van de Graaff verbesserte später noch die Effizienz, indem er in den Beschleuniger einen sogenannten „Gasstripper“ platzierte: Negative Ionen durchlaufen eine
Potenzialdifferenz.
7
1 Einleitung & Motivation
Abbildung 1.4: Tandem-Beschleuniger.
Beim Durchgang durch den Gasstripper werden den negativ geladenen Ionen die
Elektronen abgestreift, so dass jene ein zweites Mal die Spannung erfahren können. Je höher hierbei der Ionisierungsgrad desto wirksamer ist diese Anordnung
(Es können Energien von bis zu ≈ 1GeV bei mehrfach ionisierten Ionen erreicht
werden). Diese Technik wird Tandem-Beschleuniger genannt.
Da all diese statischen Varianten den gemeinsamen Nachteil besitzen, dass es bei
zu hoher Spannung Funkenüberschläge gibt, schlug erstmals G. Ising im Jahre 1924
das Konzept vor, einen Beschleuniger auf Basis von Hochfrequenzspannung zu entwickeln. R. Wideröe griff dieses Prinzip auf und baute den ersten HochfrequenzLinearbeschleuniger im Jahr 1927 [8]. Diese „Urform“ der modernen Linearbeschleuniger besteht aus einer in Strahlrichtung angeordneten Reihe von Driftröhren, wobei jeweils benachbarte Driftröhren durch einen HF-Sender auf gegensätzliches Potenzial aufgeladen werden. Zwischen den Driftröhren befinden sich Spalte, in denen sich das elektrische Feld ausbildet, während in den Driftröhren Feldfreiheit
herrscht. Wenn nun die Teilchen synchron mit dem alternierenden E-Feld sein sollen, muss für den Abstand zweier Spalte gelten:
li =
vi
λ
vλ
vi THF
=
= i HF = β i HF
2
2 f HF
2c
2
(1.1)
Dabei wird deutlich, dass die Zellenlänge mit steigender Teilchengeschwindigkeit
anwächst. Bei der von Wideröe verwendeten Frequenz von 1MHz werden somit
sehr schnell exorbitant große Drift-/Spaltlängen erreicht. Eine Erhöhung der Frequenz war damals aus technischen Gründen noch nicht möglich.
Ein Lösung dieses Problems ergab sich erst, nachdem im 2.Weltkrieg Hochfrequenzverstärker für Radar-Anwendungen entwickelt wurden. Die nun verfügbaren Frequenzen ermöglichten es Luis Alvarez im Jahr 1946 den ersten HF-Beschleuniger auf Basis eines Hohlraumresonators zu entwerfen [10]. Er besteht aus einem
8
1.1 Entwicklung der Linearbeschleuniger
Abbildung 1.5: Wideröe-Linac [9].
zylindrischen Hohlraum, in dem Driftröhren mittels Stützen axial untergebracht
sind.
Abbildung 1.6: Elektrisches Feld in einer Alvarez-Struktur.
Durch Einkopplung der entsprechenden Hochfrequenz bildet sich im Hohlraum
die TM010 (E010 ) - Mode aus. Auf Grund der Modeneigenschaft verläuft das elektrische Feld auf der Strahlachse zwischen den Driftröhren. Im Gegensatz zur WideröeStruktur zeigen hier die Feldvektoren benachbarter Spalte in die gleiche Richtung.
Eine Zellenlänge beträgt demnach βλ. Weiterhin sind in den Driftröhren magnetische Quadrupole/Solenoide zur transversalen Fokussierung eingebaut, um der
Aufweitung des Strahls (z.B. durch Raumladungseffekte/HF-Defokussierung) entgegenzuwirken. Die erste Kavität dieses Typs besaß 1m Durchmesser, 12 m Länge
und wurde mit von einem 200 MHz Klystron gespeist [11]. Auf diesem Wege konnten Protonen von 4 auf 32 MeV beschleunigt werden.
Parallel zu der Entwicklung der Hadronenlinearbeschleuniger fanden in Stanford
Forschungen zur Beschleunigung von Elektronen statt. Wegen der geringen Masse
nehmen diese sehr schnell relativistische Geschwindigkeiten an. Daher verwandte man einen Wanderwellenbeschleuniger: In einem zylinderförmigen Hohlleiter
9
1 Einleitung & Motivation
breiten sich elektromagnetische Wellen mit einer Phasengeschwindigkeit v P > c
aus.
Abbildung 1.7: Disc-loaded Waveguide („Runzelröhre“).
Damit die ankommenden Elektronen synchron mit der eingekoppelten Welle beschleunigt werden, muss die Phasengeschwindigkeit auf v P < c gedrosselt werden. Erreicht wird dies durch eine regelmäßige Anordnung von Irisblenden. Mit
dem Disc-loaded Waveguide („Runzelröhre“) wurde am SLAC (Stanford Linear
Accelerator Center) der Grundstein für eine 3 km lange Struktur realisiert, die im
Stande war, Elektronen auf 50 GeV zu beschleunigen [12].
Moderne supraleitende Resonatoren
Der Bedarf an immer höheren Beschleunigungsfeldern führte zur Forschung an supraleitenden Kavitäten. Für Teilchengeschwindigkeiten nahe der Lichtgeschwindigkeit (was im Falle von Elektronen fast auf den gesamten Linac zutrifft) kann
der Strahl mit identischen, periodischen Strukturen beschleunigt werden. Erstmals
wurde dies in Stanford 1965 mit einem bleibeschichtetem Resonator durchgeführt
[13]. Die später aus Niob gebauten elliptischen Kavitäten bestehen meist aus 1 20 Zellen bei einer Frequenz von 350 MHz - 3 GHz. In den Hohlräumen bildet
sich bei Einkopplung von HF-Leistung in der entsprechenden Frequenz die TM010 Mode aus und zwar in der π-Mode, d.h. in 2 benachbarten Hohlräumen sind die
elektrischen Felder entgegengerichtet, so dass beim Übergang der Teilchen in den
nächsten Bereich das Feld gerade in die geeignete Richtung umgepolt wird.
Die Betriebsfrequenz wird aus wirtschaftlichen Gründen möglichst hoch gewählt,
10
1.1 Entwicklung der Linearbeschleuniger
Abbildung 1.8: Links: 9-zellige 1.3 GHz TESLA Kavität [Eigentum: DESY]. Rechts:
Ausprägung des elektrischen Feldes in einer elliptischen Kavität in der π-Mode [14].
da die Frequenz reziprok mit den linearen Abmessungen der Kavität skaliert. Zudem sinkt die Wahrscheinlichkeit von Defekten im Material. Andererseits ist die
Frequenz nach oben hin auf etwa 3 GHz begrenzt, weil im supraleitenden Betrieb
der Oberflächenwiderstand quadratisch mit der Freqenz ansteigt (siehe Kapitel
3.9). Ebenfalls steigt mit der Frequenz das Wake-Feld Potenzial: Bei hohen Teilchengeschwindigkeiten (v ≈ c) kann der Strahl Felder in den Resonatorwänden
induzieren, die wiederum mit dem Strahl rückkoppeln und diesen sogar zerstören
können. Elliptische Kavitäten werden auch bei Protonen / Ionen verwandt, typischerweise bei β > 0.5.
Für den strahldynamisch sehr sensiblen Niederenergiebereich müssen bei Hadronenlinearbeschleunigern, insbesondere bei schweren Ionen, niederfrequente Strukturen eingesetzt werden, deren Felder an das Geschwindigkeitsprofil des Strahls
angepasst sein müssen. Ende der 60er Jahre begann am damaligen Kernforschungszentrum Karlsruhe in Zusammenarbeit mit dem Institut für Angewandte Physik in
Frankfurt, sowie am Argonne National Lab (USA) die Entwicklung der sogenannten Helix-Struktur [15, 16]. In einem zylindrischen Tank war ein helikal gewundenes Rohr aus Niob eingefasst, durch das flüssiges Helium strömte. Die Struktur
war jedoch sehr anfällig für mechanische Vibrationen, was die Regelung der Hochfrequenz erschwerte. Ein erfolgreicher Ersatz folgte mit der Split-Ring-Kavität, die
am California Institute of Technology 1974 erarbeitet wurde [17]. Sie war aus bleibeschichtetem Kupfer gefertigt und bestand aus Driftröhren, die über ein wendelartiges Gestell miteinander verbunden waren (Abbildung 1.9). Spätere Split-RingResonatoren, die am Argonne National Laboratory entwickelt und aus Niob gefertigt wurden, lieferten bei einer Frequenz von 97 MHz und β = 0.06 − 0.16 einen
Gradienten von 2.5-3.5 MV/m für das ATLAS Projekt [18].
11
1 Einleitung & Motivation
Abbildung 1.9: Links: Helix-Struktur des Argonne National Lab Schwerionen-Linacs.
Rechts: 97 MHz Splitring-Kavität am Argonne National Lab [Eigentum ANL].
Eine Pionierleistung im Hinblick auf aktuell im Einsatz befindliche Resonatoren gelang der University of New York at Stony Brook im Jahre 1983 mit der Erfindung
des Viertelwellen-Resonators (Quarter Wave Resonator) [19]. Im Vergleich zum
Split-Ring-Resonator hat dieser geringere magnetische Spitzenfelder auf Kosten
größerer transversaler Abmessungen. Die Geometrie leitet sich aus einem einseitig kurzgeschlossenen Koaxialleiter ab, bei dem auf Höhe von λ/4 ein Driftrohr in
den tragenden Innenleiter eingefasst ist. Driftrohr und Innenleiter sind innen hohl
und mit Helium gefüllt. Einem Koaxialleiter entsprechend bildet sich eine TEM
(Transversal Elektro-Magnetische) Welle aus. QWR werden weltweit in Projekten
wie FRIB [20], AEBF [21], ISF [22], NSCL-MSU [23], SPIRAL2 [24], ALPI-PIAVE
(INFN) [25] oder ISAC-II (TRIUMF) [26] eingesetzt. Die Frequenz liegt typischerweise zwischen 50 und 200 MHz bei Teilchengeschwindikeiten von β = 0.02 − 0.2.
Neue Impulse im Nieder- und Mittelenergiebereich setzen in jüngster Vergangenheit die Halbwellen- (HWR) bzw. die Spoke-Resonatoren. Die HWR entsprechen
einem QWR, jedoch mit einem zweiseitig kurzgeschlossenen Innenleiter der Länge λ/2. Bei den Spoke-Kavitäten verläuft der Innenleiter um 90◦ gegen die Zylinderachse versetzt. Beide Strukturen zeichnen sich durch niedrige Peakfelder aus
und besitzen gegenüber dem QWR den Vorteil einer symmetrischen Feldverteilung. Das Einsatzgebiet erstreckt sich auf Frequenzen von 150 bis 800 MHz und Geschwindigkeiten von β = 0.1 − 0.5. Die einfache und damit massentaugliche Bauweise macht diese beiden Geometrien zum Thema von aktuellen Projekten im Zusammenhang mit Protonen- und Ionentreiberbeschleunigern mit hohem Tastver-
12
1.1 Entwicklung der Linearbeschleuniger
Abbildung 1.10: Links: Interdigitaler QWR mit einer Frequenz von 57.5 MHz. Mitte:
172.5 MHz HWR. Rechts: 350 MHz 2-gap Spoke [Eigentum LANL].
hältnis, beispielsweise EUROTRANS, IFMIF (siehe Kapitel 1), FRIB, SARAF [27].
Die hier vorgestellten TEM-Strukturen (QWR, HWR und Spoke) besitzen maximal
4 Zellen pro Kavität, d.h. es sind sehr viele Resonatoren entlang eines Linacs nötig,
um die notwendige Teilchenenergie zu erreichen. Dies führt zu zahlreichen zusätzlichen Driftstrecken zwischen den Resonatoren, was zu Problemen in der Strahldynamik insbesondere bei hohen Intensitäten führen kann. Die in dieser Arbeit vorgestellte CH-Struktur überträgt das Konzept einer vielzelligen H-Moden Struktur
auf den supraleitenden Bereich.
13
1 Einleitung & Motivation
1.2 Internationale Großprojekte
Ein potenzielles Einsatzgebiet für zukünftige supraleitende CH-Kavitäten sind Anlagen, die ein hohes Maß an Zuverlässigkeit, Strahlstabilität und Effizienz erfordern. Im Folgenden sollen 2 Projekte beschrieben werden, die in der Planungsphase
stehen und gegenwärtigen Technologien viel abverlangen. In beiden Fällen ist das
IAP direkt involviert und hat Vorschläge zur Realisierung des Linac-Abschnitts erarbeitet.
1.2.1 IFMIF
In zukünftigen Fusionsreaktoren werden bei der Deuterium-Tritium-Reaktion Neutronenflüsse von 1014 bis 1015 pro Sekunde und cm2 bei einer Energie von 14 MeV,
was einer Leistungsdichte von 2MW/m2 entspricht, freigesetzt. Heutige Materialen
können diesem hohen Fluss nicht für eine sinnvolle Zeitspanne (5-10 Jahre) Stand
halten [28]. Es kommt zu Materialschädigung und Aktivierung durch Neutroneneinfang. Theoretische Modelle können nur unzureichend diese Schädigungen voraussagen. Daher wurde beschlossen, eine Neutronenquelle zu entwickeln, die solch
hohen Flüsse schneller Neutronen bereitstellt.
Abbildung 1.11: Außenansicht der Materialforschungsanlage IFMIF [28].
IFMIF (International Fusion Material Irradiation Facility) soll einen Deuteronenstrahl auf 40 MeV beschleunigen. Dieser trifft anschließend auf ein flüssiges LithiumTarget, woraufhin 14 MeV Neutronen entstehen. Hinter dem Target befinden sich
14
1.2 Internationale Großprojekte
Testmodule für die zu untersuchenden Materialproben. Der Strahlstrom beträgt
250 mA Dauerstrich und wird im der Nieder- und Mittelenergieabschnitt von 2
parallel betriebenen Linacs geliefert, da zum Einen ein solch hoher Strom nicht von
einem einzigen Beschleuniger lieferbar ist und zum Anderen, um bei einem möglichen Beschleunigerausfall die Betriebssicherheit zu gewährleisten.
Abbildung 1.12: IAP-Vorschlag der Driftröhrensektion für IFMIF [29].
Mit einer ECR-Ionenquelle beginnend wird der Strahl von einem 175 MHz 4-VaneRFQ auf 2.5 MeV/u beschleunigt. Für die anschließende Driftröhrensektion sieht
das derzeitige Referenzdesign 10 normalleitende Alvarez-Tanks mit einer Gesamtlänge von 30.3 m vor [28]. Die Option des IAP besteht aus einem normalleitenden
Abschnitt (eine IH- oder CH-Struktur), der die Energie des Strahls auf 4.5 MeV/u
anhebt, gefolgt von 8 supraleitenden CH-Resonatoren, die den Strahl auf die Endenergie von 20 MeV/u beschleunigen. Die HF-Verluste bei der Alvarez-Option
belaufen sich für beide Beschleuniger auf insgesamt 3.74 MW. Berücksichtigt man
noch die Klystroneffizienz von 60%, sind 6.2 MW Netzleistung für den Betrieb erforderlich. Für die 8 CH-Kavitäten ergeben sich in der Summe ca. 250 kW und für
den normalleitenden Abschnitt 400 kW Netzleistung, also insgesamt 0.65 MW. Eine supraleitende Variante besitzt neben dem Vorteil der höheren Betriebssicherheit
(keine thermischen Risiken) somit auch niedrigere Betriebskosten. Diese deutlichen
Vorteile der Supraleitung haben inzwischen zu einer weiteren Option mit HWR geführt.
1.2.2 EUROTRANS
Die weltweit im Betrieb befindlichen Kernkraftwerke produzieren jährliche große
Mengen an radioaktiven Abfällen. Den problematischsten Bestandteil der abge-
15
1 Einleitung & Motivation
Abbildung 1.13: Die radiotoxische Zerfallskurve von Uran [30].
nutzten Brennstäbe bilden die Transuran-Aktinide, welche sich durch hohe Radiotoxizität und Halbwertszeiten auszeichnen. Eine Alternative zur Endlagerung
der Abfallprodukte bildet das relativ junge Gebiet der Transmutation. Dabei werden die Spaltprodukte mit Neutronen bestrahlt und nach anschließendem β-Zerfall
in kurzlebige bzw. stabile Isotope umgewandelt. Die Zeitspanne hoher Radiotoxizität verkürzt sich dadurch um 3-4 Größenordnungen (s. Abb. 1.13). Das Projekt
EUROTRANS (EUROpean Research Programme for the TRANSmutation of High
Level Nuclear Waste in an Accelerator Driven System) besteht aus einem Protonenbeschleuniger, der den Strahl auf bis zu 1 GeV bei einem Strom im mA-Bereich
(zunächst 2.5 bis 4 mA, bei einer späteren industriellen Nutzung sind 25 mA vorgesehen) beschleunigt. Anschließend trifft der Stahl auf ein Flüssigmetall-Target,
wodurch Spallationsneutronen ausgelöst werden, die einen subkritischen Reaktorkern antreiben. Man nennt diese Konfiguration ADS (Accelerator Driven System).
Die Anlage soll mit 100% duty-cycle betrieben werden. Es sind nur 3-10 Strahlaus-
Abbildung 1.14: Ansicht der Nieder-/Mittelenergiesektion von EUROTRANS [31].
16
1.2 Internationale Großprojekte
Abbildung 1.15: Das Linac-Konzept für EUROTRANS. Nach der Beschleunigung auf
600MeV wird der Protonenstrahl auf ein Spallationstarget mit subkritischem Reaktor
geführt.
fälle, die über 1 Sekunde dauern, pro Jahr erlaubt wegen der sonst entstehenden,
starken Temperaturdifferenzen. Daher wird die Niederenergiesektion von 2 parallel betriebenen Beschleunigern gebildet, von denen aber nur einer den Strahl an
das Target liefert. Für den Hochenergiebereich ist das nicht nötig, da ein Ausfall
einer Kavität kompensiert werden kann, ohne den Strahl zu verlieren. Das IAP hat
für den Abschnitt bis 17 MeV folgenden Vorschlag unterbreitet (s. Abb. 1.14): Eine
ECR-Quelle liefert den Protonenstrahl an einen 4-Vane-RFQ, der den Strahl auf 3
MeV beschleunigt. Der anschließende Energiehub auf 5 MeV soll von einer normalleitenden, voraussichtlich gekoppelten CH-Struktur übernommen werden. Im
folgenden Bereich übernehmen 4 supraleitende CH-Strukturen, zwischen denen
sich 6 T Solenoide zur transversalen Fokussierung befinden, die Beschleunigung
auf 17 MeV. Die Betriebsfrequenz beträgt 352 MHz. Dieser Vorschlag wird aktuell
als Referenz-Design anerkannt.
Oberhalb von 17 MeV sind 2-spaltige 352 MHz Spoke-Resonatoren und anschließend 5-zellige 704 MHz elliptische Kavitäten vorgesehen, die die Protonen mit 600
MeV an das Target liefern.
Sowohl für IFMIF als auch für EUROTRANS sind die in dieser Arbeit durchgeführten Modifikationen im Design der CH-Kavitäten erforderlich, um die hohen
Anforderungen dieser Projekte zu erfüllen.
17
1 Einleitung & Motivation
18
2 Supraleitung
Im folgenden Kapitel werden die historischen Entwicklungen der Supraleitung sowie die damit einhergehenden makroskopischen Phänomene dargestellt. Weiterhin
soll ein kurzer Einblick in den mikroskopischen Bereich der Supraleitung (BCSTheorie) gegeben werden. Ein Abschnitt ist den limitierenden Effekten, die beim
Betrieb einer supraleitenden Kavität auftreten können, sowie deren Gegenmaßnahmen gewidmet.
2.1 Das Phänomen der Supraleitung
Da Supraleitung im Allgemeinen erst bei Temperaturen nahe des absoluten Nullpunktes in Erscheinung tritt, war die Voraussetzung für deren Entdeckung die Verflüssigung von Helium. Heike Kamerlingh-Onnes gelang es 1908 erstmals Helium
bei einer Temperatur von 4.2 K zu verflüssigen [32]. Erste Widerstandsmessungen mit reinem Quecksilber zeigten eine abrupte Widerstandsänderung bei 4.16
K [33]. Der Widerstand sank um mehrere Größenordnungen und betrug im Rahmen der Messgenauigkeit Null. Diesen Effekt, der bei Temperaturen unterhalb der
sogenannten Sprungtemperatur Tc auftritt, nannte er Supraleitung. Zwanzig Jahre
nach den ersten Messungen wurden theoretische Modelle zur makroskopischen Beschreibung der Supraleitung vorgestellt. Die umfangreichen Untersuchungen von
Fritz Walther Meissner und Robert Ochsenfeld im Jahre 1933 zeigten, dass Supraleiter parallel zur Eigenschaft des verschwindenden Widerstands noch eine damit
verbundene magnetische Eigenschaft besitzen. Sie konnten zeigen, dass ein Supraleiter beim Eintritt der Supraleitung ein vorhandenes Magnetfeld aus dem Inneren
verdrängt (siehe Abbildung 2.1). Dieses als Meissner-Ochsenfeld-Effekt bekannte
Phänomen zeichnet einen Supraleiter somit als idealen Diamagneten mit µr = 0
aus. Die Verdrängung kann jedoch nicht vollständig sein, da dies sonst zu einer
19
2 Supraleitung
Abbildung 2.1: Links: Oberhalb der Sprungtemperatur durchdringen äußere Magnetfelder den Leiter. Rechts: Unterhalb von Tc werden die externen Felder aus dem Leiter
verdrängt.
unendlich hohen Stromdichte an der Oberfläche führen würde. Die theoretische
Beschreibung des Meissner-Ochsenfeld-Effekts gelang 1935 den Brüdern Fritz und
Heinz London. Sie nahmen an, dass der Suprastrom von einer Fraktion der Leitungselektronen im Metall getragen wird. Da diese ’Super-Elektronen’ keine Reibung erfahren, gilt für deren Bewegungsgleichung in einem elektrischen Feld:
me
∂v
= −eE
∂t
(2.1)
Die Suprastromdichte lautet
js = −ens v
,
(2.2)
wobei ns die Dichte der supraleitenden Ladungsträger ist. Durch Differentiation
und Einsetzen der Bewegungsgleichung erhält man
∂js
n s e2
=
E
∂t
me
( 1. London-Gleichung )
(2.3)
Unter Zuhilfenahme der Maxwell-Gleichung (Induktionsgesetz)
∇×E = −
∂B
∂t
und der Rotation von Gleichung 2.3 kommt man auf den Ausdruck
20
(2.4)
2.1 Das Phänomen der Supraleitung
∂
∂t
me
∇ × js + B
n s e2
=0 .
(2.5)
Offenbar muss der Klammerausdruck eine Konstante sein, damit die Gleichung
erfüllt ist. Soweit stimmt dieser Ausdruck mit der klassischen Theorie des Elektromagnetismus überein und beschreibt die reibungslose Beschleunigung von Elektronen. Der entscheidende Ansatz der Brüder London ist, dass der Klammerterm 0
sein muss. Hieraus folgt die 2. London-Gleichung:
n s e2
B
∇ × js = −
me
(2.6)
Diese Annahme kann nur auf Supraleiter angewandt werden, weil bei einem Normalleiter die Stromdichte ohne den Einfluss eines elektrischen Feldes verschwindet. Weiterhin erhält man durch Kombination der Maxwellgleichung
∇ × B = µ0 j s
(2.7)
mit der 2. London-Gleichung und der nützlichen Relation:
∇ × (∇ × B) = ∇ (∇ · B) −∇2 B
| {z }
(2.8)
=0
folgende Differentialgleichung des Magnetfeldes:
∇2 B −
µ0 n s e2
B=0
me
(2.9)
Zur Vereinfachung bedient man sich der Geometrie einer Grenzfläche zwischen einer supraleitenden Ebene und dem Vakuum. Die Gleichung lautet dann
d2 By
1
− 2 By = 0
2
dx
λL
(2.10)
By ( x ) = B0 exp(− x/λ L )
(2.11)
mit der Lösung
21
2 Supraleitung
Dieses Ergebnis bestätigt den Meissner-Ochsenfeld-Effekt und beschreibt die exponenzielle Dämpfung des Magnetfeldes beim Übergang in den Supraleiter. In Gleichung 2.10 wurde ein wichtiger Supraleiter-Parameter eingeführt, die Londonsche
Eindringtiefe λ L :
r
λL =
me
µ0 n s e2
(2.12)
Sie gibt an, innnerhalb welcher Länge das Magnetfeld auf 1/e abgeklungen ist.
Typische Werte liegen bei einigen 10nm.
Die mikroskopische Bestätigung der Londonschen Gleichungen gelang erst 1957
durch die BCS-Theorie (benannt nach ihren Entdeckern John Bardeen, Leon Neil
Cooper und John Robert Schrieffer) [34]. Bewegt sich ein Elektron durch das Atomgitter, so beeinflusst es mit seiner Ladung die Atomrümpfe, die elastisch an das
Gitter gebunden sind und zieht diese ein Stück an sich heran. Da die Rümpfe sich
Abbildung 2.2: Einfaches Modell der Elektron-Gitter-Elektron Wechselwirkung [35].
aufgrund der Trägheit nicht instantan in die Ausgangslage zurückbewegen können, bleibt die Polarisation für einen Moment erhalten. Ein zweites Elektron kann
die Polarisation „spüren“ und über die Wechselwirkung mit dem Gitter an das erste
Elektron gebunden werden (s. Abb. 2.2). Eine solche Verbindung wird Cooper-Paar
genannt und muss folgende Kriterien erfüllen:
{e, ~p, ↑; e, −~p, ↓}
Der Gesamtimpuls und auch der Spin eines Paares sind Null. Es kann als Boson be-
22
2.1 Das Phänomen der Supraleitung
trachtet werden und unterliegt daher nicht mehr dem Pauli-Prinzip. Cooper-Paare
können alle den gleichen quantenmechanisch günstigsten Zustand einnehmen. Bei
dem Zusammenschluss zu einem Paar entsteht eine Energielücke, welche nicht von
Elektronen unterhalb der Fermikante überwunden werden kann. Normalleitende
und supraleitende Ladungsträger sind also scharf voneinander getrennt.
Abbildung 2.3: Links: Besetzungsdichte bei einem Normalleiter. Rechts: Bei einem Supraleiter entsteht durch Cooper-Paar-Bildung eine Energielücke im Bändermodell [14].
Legt man eine Spannung an, so bewegen sich die Cooper-Paare verlustfrei, solange die Energielücke zwischen den Cooper-Paaren und den freien Elektronen nicht
erreicht wird. Es findet keine Wechselwirkung mit den Atomrümpfen im Gitter
statt und somit auch kein Energieverlust. Der Gleichstromwiderstand verschwindet. Der Abstand zweier miteinander korrelierter Elektronen ist durch die sogenannte Kohärenzlänge ξ 0 gegeben
ξ0 =
h̄v F
k B Tc
,
(2.13)
wobei v F die Fermigeschwindigkeit ist. Diese Entfernung liegt üblicherweise bei
einigen 10 bis 100 nm und kann die Gitterkonstante deutlich übersteigen. Über
die Kohärenzlänge und Heisenbergsche Unschärferelation lässt dich die Bindungsenergie eines Paares zu wenigen meV abschätzen, was die niedrigen Sprungtemperaturen verständlich macht. Zum Vergleich: Die Bindungsenergie in einer metallischen Bindung beträgt etwa 1 bis 10 eV. Wird die zur Separation der Cooper-Paare
23
2 Supraleitung
notwendige Energie überschritten, tritt wieder die bekannte Wechselwirkung der
nunmehr einzelnen Elektronen mit dem Gitter auf. Der widerstandsfreie Stromtransport gilt jedoch nur für den Gleichstromfall. Unterhalb von Tc gibt es neben
Cooper-Paaren immer noch eine Anzahl freier Elektronen. Ein bis zur Londonschen Eindringtiefe λ L vorhandenes Wechselfeld führt zu einem Stromtransport
auch über ungepaarte Elektronen. Dieser Effekt ist somit verantwortlich für die beobachteten Ohmschen Verluste im Wechselstromfall. Für die Dichte der ungepaarten Elektronen gilt:
∆
nn ∝ exp −
kB T
,
(2.14)
wobei k B der Boltzmannfaktor, ∆ die Energielücke und T die Temperatur ist. Das
zeitlich veränderliche Magnetfeld
H = H0 exp(iωt)
(2.15)
induziert ein elektrisches Feld innerhalb der Leiterschicht, für das gilt:
Eind ∝
dH
∝ ωH
dt
(2.16)
Für die induzierte Stromdichte folgt somit:
jind ∝ nn Eind ∝ nn ωH
(2.17)
Mit der Kenntnis, dass die Verlustleistung Pc proportional zum elektrischen Feld
und der Stromdichte ist:
Pc ∝ Eind jind ,
(2.18)
ergibt sich der Zusammenhang:
Pc ∝ nn ω 2 H 2
(2.19)
Die Verluste hängen folgendermaßen mit dem Oberflächenwiderstand zusammen:
Pc ∝
24
1
Rs H 2
2
(2.20)
2.1 Das Phänomen der Supraleitung
Schließlich lässt sich der temperaturabhängige Widerstand angeben zu:
∆
Rs = Aω exp −
kB T
2
(2.21)
mit einer materialspezifischen Konstante A, der Energielücke ∆ des Supraleiters,
der Temperatur T und der Betriebsfrequenz ω. Auf den Vergleich des Oberflächenwiderstandes von Normal- und Supraleitern wird in Kapitel 3.9 eingegangen.
Man kann Supraleiter anhand des Meissner-Ochsenfeld-Effekts in verschiedene Typen einordnen: Betrachtet man die Magnetisierungskurve eines Supraleiters, so erkennt man das Verhalten eines idealen Diamagneten, bis das äußere Feld den kritischen Wert Bc erreicht hat.
Abbildung 2.4: Magnetisierungskurve eines Typ I Supraleiters.
Typ I Supraleiter verlieren bei Erreichen der kritischen Feldstärke Bc vollständig
die supraleitenden Eigenschaften (s. Abb. 2.4). Der Bereich unterhalb von Bc wird
Meissner-Phase genannt, in der das Magnetfeld bis auf eine dünne Oberflächenschicht, wie in den Londongleichungen beschrieben, aus dem Supraleiter verdrängt
wird. Dagegen besitzen Supraleiter Typ II (s. Abb. 2.5) eine größere Eindringtiefe
und weisen supraleitende Eigenschaften bis zu einer Feldstärke Bc2 auf. Im Bereich
von Bc1 bis Bc2 gibt es einen Mischzustand, der insbesondere im HF-Beschleuniger
Bereich genutzt werden kann, ohne dass die Supraleitung verloren geht. Dieser Bereich wird Shubnikow-Phase genannt.
Nur bis zur Feldstarke Bc1 wird das magnetische Feld vollständig aus dem Leiter
25
2 Supraleitung
Abbildung 2.5: Magnetisierungskurve eines Typ II Supraleiters.
verdrängt. Im Mischbereich gibt es ein Eindringen des Magnetfeldes in Form von
normalleitenden magnetischen Flussschläuchen. Diese Flussschläuche sind quantisiert und besitzen alle den gleichen magnetischen Fluss eines Flussquants
Φ0 = h/2e = 2 · 10−15 Vs.
(2.22)
Gemäß der Ginzburg-Landau-Theorie spielen die Londonsche Eindringtiefe und
die Kohärenzlänge die entscheidende Rolle bei der Klassifizierung von Typ I und
Typ II Supraleitern. Man definiert den sogenannten Ginzburg-Landau Parameter:
κ=
λL
ξ0
(2.23)
Nun gilt:
1
κ < √
2
1
κ > √
2
−→
Typ I
(2.24)
−→
Typ II
(2.25)
Wegen der hohen erreichbaren kritischen Magnetfelder eignen sich Typ II Supraleiter ausgezeichnet zum Bau von Resonatoren (früher benutzte man Blei, mittlerweile Niob). Zudem verfügt Niob über eine gute mechanische Stabilität sowie
Verformbarkeit. An dieser Stelle sollen noch einmal die wichtigsten Parameter des
26
2.2 Grenzen supraleitender Beschleuniger
Materials Niob aufgelistet werden:
Typ
Tc
λL
ξ0
Bc1
Bc2
II
9.2K
32nm
39nm
170mT
240mT
Tabelle 2.1: Wichtige Parameter von Niob[14].
2.2 Grenzen supraleitender Beschleuniger
Kavitäten, die supraleitend betrieben werden, besitzen die ökonomisch wertvolle Eigenschaft, eine sehr geringe Leistung (wenige Watt) zu dissipieren. Lediglich
das zur Aufrechterhaltung der Supraleitung notwendige Kryosystem benötigt signifikante Leistungsmengen (in der Größenordnung von 10 kW pro Kavität). Die
eigentlichen Limitierungen entstehen jedoch hauptsächlich durch materialbedingte
Effekte. Die wichtigsten Erscheinungen hierbei sind:
• Restwiderstand R0
• Multipacting
• Thermaler Zusammenbruch
• Feldemission
2.2.1 Restwiderstand
Der gesamte Oberflächenwiderstand einer Kavität setzt sich aus dem theoretischen
Widerstand gemäß der BCS-Theorie (s. Kap. 3.9) und einem technisch bedingten
Restwiderstand R0 , der durch Messung zu bestimmen ist, zusammen. Dieser Restwiderstand kann unter Umständen deutlich größer werden als der BCS-Wert, was
eine Minimierung von R0 vor allem bei Resonatoren mit Frequenzen oberhalb von
1 GHz und Betriebstemperaturen unter 2 K zwingend erfordert. Eine Ursache des
Restwiderstandes ist der eingeschlossene magnetische Fluss in Supraleitern II. Art
27
2 Supraleitung
Abbildung 2.6: Eingeschlossene Magnetfelder im Supraleiter. Die Felder sind umgeben
von einem normalleitenden Kern, welcher für die Verluste verantwortlich ist.
aufgrund unzureichender Abschirmung äußerer Magnetfelder (z.B. des Erdmagnetfeldes) [14]. Gemäß des Meissner-Ochsenfeld Effekts erwartet man, dass jegliche Magnetfelder (sofern H < Hc1 ) aus dem Leiter verdrängt werden. Durch Unreinheiten im Material kommt es jedoch beim Abkühlen unterhalb der Sprungtemperatur zum Einschluss („pinning“) von Magnetfeldlinien. Diese enthalten einen
normalleitenden Kern, der letztendlich für die zusätzlichen Verluste sorgt (siehe
Abb. 2.6).
Der magnetische Anteil am Restwiderstand lässt sich für Niob mit Hilfe der Beziehung
q
Rmag = 0.3[nΩ] Hext [mOe]
f [ GHz]
(2.26)
berechnen.
Die Umrechnung der magnetischen Einheiten lautet:
1 mT =
ˆ 10 G =
ˆ 10 Oe =
ˆ 795 A/m
(2.27)
Wenn das Erdmagnetfeld (H = 500 mOe) nicht abgeschirmt wird, kann der Restwiderstand in der Größenordung von 100 nΩ liegen, was wiederum zu einer deutlichen Reduzierung der Güte führt. Eine Abschirmung erfolgt üblicherweise durch
Ummantelung mit einem µ-Metall. Dieses bewirkt, dass das Magnetfeld durch das
µ-Metall um die Kavität herum geführt wird. Auf diese Weise kann das Erdmagnetfeld um den Faktor 10 bis 50 abgeschwächt werden.
28
2.2 Grenzen supraleitender Beschleuniger
2.2.2 Multipacting
Multipacting ist ein resonantes Phänomen, das prinzipiell in jeder Hochfreqzenzstruktur auftreten kann [14]. Verursacht wird Multipacting (Multi-Impacting = Mehrfacheinschlag) von einem Elektron, das durch kosmische Strahlung, radioaktiven
Zerfall, Photoemission oder Feldemissionselektronen aus der Oberfläche des Resonators geschlagen wird, von den elektrischen Feldern weiter beschleunigt wird,
und schließlich beim Aufprall an einer anderen Stelle der Kavität Sekundärelektronen rauslösen kann. Diese wiederum können weitere Elektronen herausschlagen,
so dass sich der gesamte Prozess zu einem lawinenartigen Elektronenanstieg entwickeln kann. Der dabei entstehende Elektronenstrom wird durch die eingekoppelte
Leistung gespeist, was zur Folge hat, dass sich in der Resonanzkurve ein Plateau
ausbildet, da der Feldpegel nicht weiter erhöht werden kann. Handelt es sich bei
diesem Plateau um eine sogenannte „weiche Barriere“, so kann mit entsprechenden
Maßnahmen darüber hinweg konditioniert werden. Bei „harten Barrieren“ kann
dies zu einem Neudesign des Resonators führen. Der supraleitende CH-Prototyp
wies bei Tests mehrere weiche Multipacting-Barrieren auf, die nach einer Konditionierungsdauer von 1 bis 15 Stunden jedoch wegkonditioniert werden konnten
[3].
2.2.3 Thermaler Zusammenbruch
Ein Zusammenbruch der Supraleitung in einem Resonator kann durch Oberflächendefekte hervorgerufen werden. Dabei kommt es in Regionen, in denen das
Magnetfeld stark präsent ist, zu einer lokalen Temperaturerhöhung aufgrund submillimeter großer normalleitender Bereiche. In diesen Defekten fließt ein normalleitender Strom, der ab einem bestimmten Leistungspegel so viel Energie dissipiert,
dass die Supraleitung durch die starke Wärmeentwicklung zunächst lokal und
schließlich im gesamten Resonator zusammenbricht. Man spricht hierbei vom sogenannten „Quench“. Die Störstellen entstehen durch Einschlüsse im Rohmaterial
oder beim Zusammenschweißen der Resonatoreinzelteile. Um Quencherscheinungen zu vermeiden, sollte auf qualitativ hochwertiges Niob zurückgegriffen werden
(zum Einen wegen der Reinheit und zum Anderen aufgrund der besseren Wärmeleitfähigkeit), und Schweißvorgänge müssen behutsam erfolgen. Außerdem kann
nachträglich die Oberfläche präpariert werden.
29
2 Supraleitung
2.2.4 Feldemission
Die gravierendste Limitierung supraleitender Beschleuniger, insbesondere für Niederenergiestrukturen, besteht in der Feldemission. Den hierfür zu Grunde liegenden Mechanismus macht man sich folgendermaßen plausibel [14]: Elektronen können bei hinreichend hohem elektrischen Feld aus der Resonatoroberfläche herausgelöst und durch das elektrische Feld beschleunigt werden. Treffen sie an einer anderen Stelle auf die Resonatorwand, wird Strahlung im Röntgenbereich emittiert,
die z.B. mit Thermo-Lumineszens-Dosimetern detektiert werden kann [2]. Die Beschleunigung der Elektronen verbraucht zusätzliche Leistung, was die HF-Verluste
erhöht. Sichtbar wird dieses Phänomen durch einen Abfall der Güte bei ansteigendem Feldgradienten (s. Abb. 2.7). Eigentlich erwartet man, dass die Güte unabhän-
Abbildung 2.7: Die belastete Güte in Abhängigkeit vom Feldgradienten.
gig vom elektrischen Feld auf gleichem Niveau bleibt. Aber ab einem gewissen Pegel fällt die Güte deutlich ab, und die Kopplungsstärke verändert sich. Gemäß der
Fowler-Nordheim-Theorie [36] tritt Feldemission bei statischen Feldern in der Größenordnung GV/m ein, was sich jedoch nicht bei HF-Resonatoren anwenden lässt.
Hier erfolgt Feldemission schon bei wenigen 10 MV/m. Der Grund sind Fremdkörper auf der Oberfläche im µm-Bereich (sogenannte „Emitter“). Aufgrund ihrer
geringen Ausdehnung entstehen dort lokal sehr hohe Feldstärken, die Feldemission verursachen können. Eine gründliche Oberflächenbehandlung ist daher zur
Einschränkung von Feldemission zwingend erforderlich.
30
3 Resonatorkenngrößen
Nachfolgend werden die grundlegenden Hochfrequenzparameter eines Resonators angesprochen. Diese können unterteilt werden in Größen, die vom Oberflächenwiderstand abhängen, und solche, die unabhängig davon sind. Erstere eignen
sich, um Eigenschaften der normalleitenden bzw. supraleitenden Resonatoren untereinander zu vergleichen. Hierzu gehören:
• Die Güte Q0
• Die Verlustleistung Pc
• Die Shuntimpedanz R a
Zur Bewertung von Strukturen unabhängig vom Oberflächenwiderstand werden
die folgenden Größen herangezogen:
• Die Beschleunigungsspannung Ue f f / Der Feldgradient Ea
• Die gespeicherte Energie W
• Der Geometriefaktor G
• Die geometrische Impedanz R a /Q0
• Die Peakfeld-Verhältnisse E p /Ea und B p /Ea
• Die kryogene Last R a Rs
3.1 Die Güte
Die Güte Q0 gibt an, wie viel gespeicherte Energie pro HF-Periode im Resonator
dissipiert wird. Sie ist definiert durch:
31
3 Resonatorkenngrößen
Q0 =
ωW
Pc
,
(3.1)
hierbei ist ω die Kreisfrequenz, W die gespeicherte Energie und Pc die Verlustleistung.
Experimentell wird die Güte über die Breite der Resonanzkurve bestimmt:
Q0 =
f0
∆f
(3.2)
mit f 0 als Resonanzfrequenz und ∆ f als Differenz der Frequenzen ober- und unterhalb der Resonanzfrequenz, bei denen die Spannungsamplitude auf den √1 -ten
2
Teil abgefallen ist.
Da die Güte vom Oberflächenwiderstand Rs abhängt, liegt sie bei einer supraleitenden Kavität um 4 bis 5 Größenordnungen höher als bei einer normalleitenden
(109 /104 )! Beim supraleitenden Betrieb ist die Resonanzkurve in der Größenordnung 1Hz breit, was eine Regelung erheblich erschwert. Abhilfe kann hier eine Veränderung der Einkopplung und somit der externen Güte (s. Kap. 7) leisten. Es gibt
also neben der intrinsischen Güte Q0 noch die externe Güte Qe und außerdem die
belastete Güte Q L . Dies wird näher in Abschnitt 7.1 erläutert.
3.2 Die Verlustleistung
An der Resonatoroberfläche treten aufgrund der durch die Magnetfelder induzierten Ströme Ohmsche Verluste auf. Die dissipierte Leistung ist gegeben durch:
1
Pc = Rs
2
Z
| H |2 ds
(3.3)
S
Bei normalleitenden Kavitäten kann sie bis zu mehreren 100kW betragen, während
sie bei supraleitenden Beschleunigern wenige Watt beträgt (nur die HF-Verlustleistung
berücksichtigt!).
32
3.3 Beschleunigungsspannung und Gradient
3.3 Beschleunigungsspannung und Gradient
Bei Einkopplung von Leistung der entsprechenden Frequenz bildet sich zwischen
den Driftrohren das elektrische Feld aus. Zum Zeitpunkt der maximalen Ausprägung lässt sich die Spannung einfach beschreiben zu:
U0 =
Zg
Ez (z)dz
(3.4)
0
Dies entspricht jedoch nur einer Momentaufnahme. Das Feld baut sich bei Eintritt
des Teilchenpakets erst noch auf und nach dem Passieren des Maximums in der
Spaltmitte bereits wieder ab (s. Abb. 3.1). Die effektive Spannung Ua ist demnach
geringer als die Amplitudenspannung U0 . Für sie gilt:
Ua =
Zt
0
0
0
Ez (z) cos(ωt )dt =
Zg
0
Ez (z) cos
ωz
βc
dz
(3.5)
Abbildung 3.1: Das elektrische Feld in einem Spalt zu verschiedenen Zeitpunkten. Bei
Ein- / und Austritt des Sollteilchens ist das Feld noch nicht vollständig aufgebaut. In
der Spaltmitte sieht es das Maximalfeld. Das gemittelte, effektive Feld ist rot dargestellt.
Bildet man das Verhältnis der beiden Größen, so erhält man den Laufzeitfaktor T
(Transit Time Factor), der angibt, welchen Anteil der Spannung die Teilchen tat-
33
3 Resonatorkenngrößen
sächlich erfahren:
Rg
T :=
Ez (z) cos
0
Rg
ωz
βc
dz
(3.6)
Ez (z)dz
0
Für komplexe Strukturen, wie die CH-Struktur, kann T nur numerisch bestimmt
werden und liegt typischerweise zwischen 0.7 und 0.9.
Die mittleren elektrischen Beschleunigungsfelder erhält man durch Aufsummierung der Spannungen dividiert durch die effektive Länge des Resonators:
1
E0 =
L
ZL
| Ez (z)| dz
(3.7)
0
βλ
(Bemerkung: Unter der effektiven Länge L wird im Allgemeinen: L = n · 2 verstanden. Mit n = Anzahl der Zellen, β der Teilchengeschwindigkeit und λ der Wellenlänge.)
Das effektive Beschleunigungsfeld folgt durch Multiplikation mit dem Laufzeitfaktor:
Ea = E0 · T
(3.8)
3.4 Die Impedanz
Ein sehr wichtiger Parameter vor allem für normalleitende Beschleuniger ist die
Impedanz. Sie ist ein Maß für die Effizienz und gibt an, wie gut die eingespeiste HFLeistung in Beschleunigungsspannung umgewandelt wird. Sie ist definiert über:
U02
R0 =
Pc
(3.9)
Analog zur effektiven Beschleunigungsspannung definiert man eine effektive Impedanz R a um die endliche Auf- / Abbauzeit der Felder zu berücksichtigen:
Ra =
34
Ua2
U2 T2
= 0
= R0 T 2
Pc
Pc
(3.10)
3.5 Die gespeicherte Energie W
Da die effektive Impedanz eine längenabhängige Größe ist, führt man zum einfachen Vergleich verschiedener Beschleuniger eine längenunabhängige Shuntimpedanz Za ein:
U2
Ra
= a
(3.11)
Za =
L
Pc L
3.5 Die gespeicherte Energie W
Die gespeicherte Engergie ist abhängig vom Volumen der magnetischen bzw. elektrischen Felder innerhalb der Kavität.
1
W = µ0
2
Z
V
1
| H0 | dV = e0
2
2
Z
| E0 |2 dV
(3.12)
V
Eine äquivalente Beschreibung über die elektrischen und magnetischen Felder ist
aufgrund der gleichen Energiebilanz beider Felder im zeitlichen Mittel möglich.
3.6 Der R/Q - Wert
Setzt man die 2 wichtigen Resonatorgrößen Impedanz und Güte ins Verhältnis, so
erhält man einen vom Oberflächenwiderstand unabhängigen Parameter.
U2
Pc
Ua2
Ra
= a ·
=
[Ω]
Q0
Pc ω0 W
ω0 W
(3.13)
Das Verhältnis R a /Q0 drückt anschaulich die Fähigkeit aus, die elektrischen Beschleunigungsfelder auf die Strahlachse zu konzentrieren.
3.7 Der Geometriefaktor G
Ein weiterer oberflächenunabhängiger Parameter entsteht durch die Multiplikation
des Oberflächenwiderstands mit der Güte.
G = R s · Q0 = R s
ω0 W
[Ω]
Pc
(3.14)
35
3 Resonatorkenngrößen
In diesen sogenannten Geometriefaktor G gehen ausschließlich die geometrischen
Elemente einer Struktur ein, was ihn zu einem sehr guten Merkmal zum Vergleich
verschiedener Resonatoren auszeichnet. Der Geometriefaktor entspricht anschaulich einer normierten Güte.
3.8 Elektrische und magnetische Spitzenfelder
Zur Ermittlung der maximal applizierbaren Beschleunigungsfelder in einem supraleitenden Resonator ist es notwendig, die elektrischen und magnetischen Spitzenfelder (E p bzw. B p ) zu ermitteln. Normalleitende Beschleuniger werden bei hohen
Tastverhältnissen maßgeblich durch Restriktionen in der Kühlung der hohen Verlustleistung beschränkt, supraleitende Kavitäten werden dagegen durch die Peakfelder limitiert. Hohe elektrische Spitzenfelder können Feldemission begünstigen,
was zu einem starken Abfall der Güte aufgrund zusätzlicher Verluste führt (siehe
Kap. 2.2.4). Die Bestimmung dieser Felder ist jedoch nur für wenige einfache Fälle,
wie den Zylinder-Resonator, analytisch möglich. Für diesen gilt nämlich E p = E0 ,
z.B. im Falle der TM010 -Mode, und somit:
Ep
1
π
= =
Ea
T
2
(3.15)
In Driftröhrenbeschleunigern treten jedoch wesentlich höhere Spitzenfelder aufgrund der Verdichtung der Feldlinien im Aperturbereich auf. Das Peakfeldverhältnis liegt typischerweise im Bereich:
10 ≥
Ep
≥2
Ea
(3.16)
Die zweite Begrenzung rührt von den magnetischen Spitzenfeldern. Sie können
einen Zusammenbruch der Supraleitung bewirken (Quench), sobald das kritische
Magnetfeld des supraleitenden Materials erreicht ist (siehe Kap. 2.2.3) oder die Verlustleistung in einem Materialdefekt einen kritischen Wert überschreitet. Man definiert, analog zum elektrischen Peakfeld, das Verhältnis B p /Ea , welches sich im
Intervall
36
3.9 Der Oberflächenwiderstand Rs
Bp
mT
mT
≥3
20
≥
MV/m
Ea
MV/m
(3.17)
bewegt. Beide Verhältnisse können numerisch mit leistungsfähigen 3D-Simulationsprogrammen berechnet werden und bilden einen Schwerpunkt bei allen Optimierungsprozessen. CH-Strukturen bewegen sich hinsichtlich der magnetischen Peakfelder deutlich unterhalb des kritischen Bereiches (Prototyp: 30 bis 60 mT, B p /Ea =
5.7), was den Schwerpunkt des Optimierungsprozesses auf die elektrischen Felder
verlagert.
3.9 Der Oberflächenwiderstand Rs
Legt man eine Wechselspannung an einen Normalleiter an, so fließt der Strom nicht
im gesamten Leiter, sondern nur in einer dünnen Schicht an der Oberfläche. Dieses
als „Skin-Effekt“ bekannte Phänomen rührt daher, dass durch die zeitlich veränderlichen Felder ein Rotationsfeld Eind induziert wird. Dieses ist dem axialen E-Feld
entgegengerichtet und bewirkt, dass der Stromfluss exponenziell mit der Eindringtiefe im Inneren des Leiters abnimmt. Die Dicke der Schicht δ ist frequenz- / und
materialabhängig und gibt an, in welchem Abstand vom Rand das Feld auf den
Bruchteil 1/e abgefallen ist:
s
1
σπ f µr µ0
δ=
(3.18)
σ ist hierbei die spezifische Leitfähigkeit und µr die Permeabilität des Leiters. Typische Werte für δ bei f = 100MHz liegen im µm-Bereich. Der Oberflächenwiderstand Rs eines Normalleiters hängt von der Schichtdicke und der Leitfähigkeit
folgendermaßen ab:
r
πµ0µr f
1
Rs =
=
(3.19)
σδ
σ
Der Widerstand ist also proportional zur Wurzel der Frequenz. Bei der Betrachtung
der Supraleitung wurde in Kapitel 2.1 bereits die Abschätzung
∆
Rs = Aω exp −
kB T
2
37
3 Resonatorkenngrößen
aufgezeigt. Es fällt auf, dass hierbei der Widerstand quadratisch mit der Frequenz
anwächst und exponenziell mit T −1 abfällt. Eine sehr gute empirische Näherung
für Niob bei niedrigen Temperaturen (T < Tc /2) ist [14]
R BCS = 2 · 10
−4
1
T
f
1.5
2
17.67
exp −
T
.
(3.20)
In der Praxis zeigt sich jedoch, dass der Oberflächenwiderständ höher ist als von
der BCS-Theorie vorausgesagt wird. Zusätzlich zum BCS-Anteil tritt noch der (temperaturunabhängige) Restwiderstand R0 (s. Kap. 2.2.1) hinzu:
Rs = R BCS ( T ) + R0
(3.21)
3.10 Die kryogene Last R a Rs
Supraleitende Resonatoren zeichnen sich unter Anderem durch ihre ökonomische
Effizienz aus. Daher ist es wichtig im Vorfeld die anfallenden kryogenen Verluste
abschätzen zu können. Diese Verluste können berechnet werden mit
Pc =
U2
Ua2
U 2 Rs
Ua2
= a
= Rs = a
Ra
Ra
Ra
R a Rs
Q
G
Q0
0
.
(3.22)
Q0
Das Produkt R a Rs verhält sich demnach antiproportional zu den Verlusten. Die
Werte von R a Rs liegen typischerweise bei 104 bis einige 105 Ω2 .
3.11 Skalierung der Parameter
Bei der Untersuchung eines Designs ist es wichtig zu wissen, wie sich die einzelnen Parameter als Funktion der Frequenz verhalten, also bei Änderung der transversalen Dimensionen des Resonators. Bei festgehaltener Länge der Kavität (und
damit festen, frequenzunabhängigen Feldern) skaliert die Frequenz reziprok mit
den Querabmessungen.
38
3.11 Skalierung der Parameter
Rs
Pc
Q0
Za
G
Ra
Q0
R a Rs
∝
∝
∝
∝
∝
SL
f2
f
−
f 2
f −1
f0
∝
∝
∝
∝
∝
NL
f 1/2
f −1/2
f −1/2
f 1/2
f0
∝
f1
∝
f1
∝
f1
∝
f1
Tabelle 3.1: Skalierung der Parameter im supra- und normalleitenden Betrieb bei Variation der transversalen Abmessungen
Insbesondere die Größen, die unabhängig vom Oberflächenwiderstand sind, zeigen das gleiche Skalierungsverhalten und eignen sich zum Vergleich verschiedener Resonatoren. Eine Ausführliche Darstellung der Resonatorparameter und deren Skalierungsverhalten findet sich in [14, 3].
39
3 Resonatorkenngrößen
40
4 H-Moden Theorie
Die gegenwärtig verwendeten Hochfrequenz-Linearbeschleuniger lassen sich in 3
Klassen einteilen: In die TM(E) - , die TEM - und die TE(H) - Klasse.
Zur ersten Gruppe gehören beispielsweise der Alvarez-Beschleuniger sowie die in
modernen Beschleunigeranlagen oftmals im Hochenergiebereich verwendeten elliptischen Kavitäten. Die Geometrie dieser Klasse beruht auf einem axialsymmetrischen Hohlraum (TM010 ), in dem sich ein transversal-magnetisches Feld aufbaut,
so dass das beschleunigende elektrische Feld entlang der Strahlachse ausgerichtet
ist und somit dem Teilchenstrahl direkt Energie zuführen kann.
TEM-Strukturen wie der Viertelwellenresonator (QWR), der Halbwellenresonator
(HWR) bzw. Spoke bestehen ebenfalls aus einem Zylinder, jedoch mit einem in
Richtung der Zylinderachse verlaufenden Innenleiter (beim Spoke um 90◦ gedreht)
mit der viertel bzw. halben Länge der Wellenlänge.
Zur Gruppe der TE- bzw. H-Moden Beschleuniger zählen die IH- und die CHStruktur. Sie werden in einer transversal-elektrischen Mode betrieben und können
daher den Teilchen nicht auf direktem Wege Energie übermitteln; stattdessen wird
dies über eine Modifikation der Geometrie erreicht. Die Theorie sowie die bauartbedingten Eigenschaften der H-Moden Kavitäten werden in den folgenden Abschnitten erläutert.
Im Vakuum ergeben sich die Maxwellgleichungen zu:
∇·E = 0
(4.1)
∂B
∂t
(4.2)
∇·B = 0
1 ∂E
∇×B = 2
c ∂t
(4.3)
∇×E = −
(4.4)
Durch Kombination der Gleichungen 4.2 und 4.4 lassen sich die beiden Wellenglei-
41
4 H-Moden Theorie
chungen gewinnen:
1 ∂2 E
= 0
c2 ∂t2
1 ∂2 B
∆B − 2 2 = 0
c ∂t
∆E −
(4.5)
(4.6)
Ausgehend von einem zylindrischen Hohlraum ist es sinnvoll mit Zylinderkoordinaten zu arbeiten. Strukturen, in deren Hohlraum eine Stehwelle entsteht, können
eine E- bzw. TM-Mode oder eine H- bzw. TE-Mode ausbilden. Erstere zeichnen
sich dadurch aus, dass das elektrische Feld longitudinal und das Magnetfeld transversal zur Strahlachse verlaufen. Bei H- oder TE-Moden befindet sich dagegen das
Magnetfeld in Strahlrichtung und das E-Feld steht senkrecht dazu. Die unterschiedlichen Moden werden durch Indizes, beispielsweise Emnp , charakterisiert. Ein Index
steht für eine Ausprägung des Feldes in der entsprechenden Raumrichtung. Dabei
definiert man folgendermaßen bei E-(TM-)Moden:
• m: Zahl der azimutalen Knoten von Ez im Bereich 0 ≤ φ < π
• n: Zahl der radialen Knoten von Ez im Bereich 0 ≤ r ≤ R
• p: Zahl der longitudinalen Halbwellen entlang der z-Achse im Bereich 0 ≤
z≤L
Analog folgt für H-(TE-)Moden:
• m: Zahl der azimutalen Knoten von Hz im Bereich 0 ≤ φ < π
• n: Zahl der radialen Knoten von Hz im Bereich 0 ≤ r ≤ R
• p: Zahl der longitudinalen Halbwellen entlang der z-Achse im Bereich 0 ≤
z≤L
Als Lösungen der oben genannten Wellengleichungen (Gl. 4.5 und 4.6) erhält man
für die einzelnen Feldkomponenten [37]:
42
E-Moden
Ez = E0 Jm ( xmn ρ) cos(mφ) cos
pπz L
pπR
E0 J 0 ( xmn ρ) cos(mφ) sin
eiωt
Lxmn m
L
pπz pπmR2
−
eiωt
E0 Jm ( xmn ρ) sin(mφ) sin
2
L
Lxmn r
0
pπz mR2
−iω 2 2 E0 Jm ( xmn ρ) sin(mφ) cos
eiωt
L
xmn rc
pπz R
0
E0 J ( xmn ρ) cos(mφ) cos
eiωt
−iω
2
L
xmn c
Er = −
Eφ =
Bz =
Br =
Bφ =
eiωt
pπz (4.7)
(4.8)
(4.9)
(4.10)
(4.11)
(4.12)
H-Moden
Bz = B0 Jm ( xmn ρ) cos(mφ) sin
Br =
Bφ =
Ez =
Er =
Eφ =
pπz L
eiωt
pπz pπR
0
0
B
J
eiωt
(
x
ρ
)
cos
(
mφ
)
cos
0 m
mn
0
Lxmn
L
pπz 2
pπmR
B
−
eiωt
0 Jm ( x mn ρ ) sin( mφ ) cos
02 r
L
Lxmn
0
pπz mR2
iω 02 B0 Jm ( xmn ρ) sin(mφ) sin
eiωt
L
xmn r
pπz R
0
eiωt
iω 0 B0 J 0 ( xmn
ρ) cos(mφ) sin
xmn
L
(4.13)
(4.14)
(4.15)
(4.16)
(4.17)
(4.18)
0 für deren erste Ableitung,
Dabei steht Jm für die Besselfunktion m-ter Ordnung, Jm
0 für die jeweiligen n-ten Nullstellen und ρ für (r/R). Eine Zusammenxmn und xmn
0 findet sich in den Tabellen 4.1 und 4.2
stellung der ersten Nullstellen von Jm und Jm
wieder.
43
4 H-Moden Theorie
m
xm1
xm2
xm3
0
1
2
2.405
3.832
5.136
5.520
7.016
8.417
8.654
10.173
11.620
Tabelle 4.1: Nullstellen der Besselfunktion.
m
0
xm1
0
xm2
0
xm3
0
1
2
3.832
1.841
3.054
7.016
5.331
6.706
10.174
8.536
9.970
Tabelle 4.2: Nullstellen der Ableitung der Besselfunktion.
Stehende Wellen können sich bis zu einer sogenannten Grenzwellenzahl kc ausbreiten. Es gilt:
k2 = k2c + k2z
,
(4.19)
wobei in longitudinaler Richtung in einem Resonator der Länge L die Bedingung
k z L = pπ ,
p = 1, 2, 3, . . .
(4.20)
erfüllt sein muss. Für E- und H-Moden muss die Resonanzfrequenz unterschiedlich berechnet werden, da die Bedingungen an die Grenzwellenzahl kc verschieden
sind. Für elektrische Leiter gilt:
Eφ ( R) = 0
(4.21)
Br ( R) = 0 .
(4.22)
Zusammen mit den oben genannten Feldverteilungen erhält man für E-Moden:
Jm (k cE R) = Jm ( xmn ) = 0
xmn
k cE =
R
(4.23)
(4.24)
und für H-Moden:
0
0
0
Jm
(k cH R) = Jm
( xmn
)=0
0
x
k cH = mn .
R
44
(4.25)
(4.26)
4.1 Die IH-Struktur
Eingesetzt in Gl. 4.19 und mit Hilfe von Gl. 4.20 ergibt sich:
xmn 2 π p 2
+
L
s R
0 2 xmn
π p 2
=
.
+
R
L
kE =
kH
r
(4.27)
(4.28)
Die Resonanzfrequenz kann für beide Fälle über den Zusammenhang f = kc/2π
ermittelt werden:
r
xmn 2 1 p 2
fE = c ·
+
(4.29)
4 L
s 2πR
0 2
xmn
1 p 2
H
f
= c·
+
.
(4.30)
2πR
4 L
Diese Frequenzen entsprechen jedoch denen eines Rundhohlleiters. Der Einbau
von Stützen / Driftröhren bewirkt eine erhebliche Kapazitätserhöhung, was wiederum die Resonanzfrequenz deutlich herabsetzt. Eine analytische Betrachtung kann
nur näherungsweise erfolgen (siehe [1, 3]). Für eine genaue Kalkulation werden
leistungsfähige 3D - Simulationsprogramme (CST Microwave Studio) verwandt.
4.1 Die IH-Struktur
Die Interdigital H-Mode Struktur ist ein Resonator, der auf einem zylindrischen
Außenmantel basiert und in der H111 -Mode betrieben wird. Im Tankinneren werden Driftröhren durch abwechselnd auf gegenüberliegenden Seiten angebrachten
Stützen gehalten. Das Magnetfeld befindet sich longitudinal in den beiden freien
Tankbereichen in jeweils gegengesetzter Richtung. Der zeitlich veränderliche Magnetfluss induziert aufgrund der Anordnung auf den Stützen abwechselnd ein ungleichnamiges Potenzial, was dazu führt, dass sich zwischen den Driftröhren ein
elektrisches Feld in der erwünschten longitudinalen Richtung ausbildet (s. Abb.
4.1). Der Vorteil, der sich gegenüber E-Moden Strukturen ergibt, ist, dass das elektrische Feld stark auf der Achse konzentriert ist. Zusätzlich muss der Strom nur
über den halben Tankumfang fließen. Beides führt zu einer hohen Shuntimpedanz
und damit auch zu einer hohen Effizienz. Zusammen mit der hierfür entwickelten
45
4 H-Moden Theorie
Abbildung 4.1: Links: Frontansicht auf eine IH-Struktur mit den Magnetfeldlinien.
Rechts: Seitenansicht einer IH mit den elektrischen Feldlinien.
Strahldynamikroutine KONUS können lange linsenfreie Sektionen realisiert werden. Die IH-Struktur wurde bereits in den 1950er Jahren diskutiert und ist mittlerweile in zahlreichen großen Projekten weltweit vertreten, wie z.B. SCHWeIN an der
LMU München [38], CERN (LINAC-3 [39], REX-ISOLDE [40]), GSI mit dem Hochstrominjektor HSI [41] und Hochladungsinjektor HLI [42] oder der Heidelberger
Ionentherapieanlage HIT [43, 44].
4.2 Die CH-Struktur
Die Crossbar H-Mode Struktur verdankt ihren Namen der gekreuzten Stützengeometrie, bedient sich wie die IH-Struktur eines Zylindermantels und verwendet die
H211 -Mode. Aufgrund der höheren Mode besitzt sie bei gleichen Querdimensionen
ungefähr die doppelte Frequenz. Das Magnetfeld befindet sich longitudinal in den
vier Tanksegmenten, wobei benachbarte Felder in entgegengesetzte Richtung zeigen. Auch hier werden per Induktion durch das zeitlich veränderliche Magnetfeld
die Driftröhren abwechselnd aufgeladen und es entsteht eine longitudinale Spannungsverteilung (s. Abb. 4.2). Für den technisch interessanten Frequenzbereich von
300-400 MHz (die Betriebsfrequenz von Klystrons liegt typischerweise in diesem
Intervall) werden die Abmessungen einer IH-Struktur zu klein, weshalb auf eine
46
4.2 Die CH-Struktur
Abbildung 4.2: Links: Frontansicht auf eine CH-Struktur mit den Magnetfeldlinien.
Rechts: Seitenansicht einer CH mit den elektrischen Feldlinien.
CH-Struktur zurückgegriffen werden kann. Zusätzlich besteht bei der CH-Kavität
die Möglichkeit des supraleitenden Betriebes, was für moderne Linacs mit hohen
Strahlströmen und Tastverhältnis ein sehr wichtiges Argument ist. Auch bei der
CH-Struktur kann durch die KONUS-Routine über weite Strecken auf Fokussierelemente verzichtet werden. Wichtig ist bei beiden H-Moden Strukturen die Gewährleistung eines flachen Feldverlaufes, um Spitzenfelder zu reduzieren und um
die Strahldynamik zu begünstigen. Die entsprechenden Maßnahmen hierzu werden in Kapitel 6 näher erläutert.
47
4 H-Moden Theorie
48
5 Der supraleitende CH-Prototyp
In den letzten Jahren wurde am IAP intensiv an einem vielzelligen, supraleitenden
CH-Prototypen geforscht. Ziel dabei war es, das grundlegende Prinzip dieser neuartigen H-Moden-Struktur unter kryogenen Bedingungen zu demonstrieren [2].
Abbildung 5.1: Frontansicht des aus Niob gefertigten 360MHz CH-Prototypen.
Es war eine große Anzahl an Optimierungsschritten notwendig bis das finale Design der Kavität erreicht wurde [45]. Da es sich um eine supraleitende Struktur
handelt, wurde ein Schwerpunkt auf die Minimierung der elektrischen und magnetischen Spitzenfelder gelegt. Das Magnetfeld steigt mit wachsendem Abstand
zur Strahlachse näherungsweise mit
Bz (r ) = B0
( R T − r )2
1−
R2T
!
(5.1)
an [3], wobei B0 das Feld an der Resonatorwand bei r = R T ist. Eine wichtige Aufgabe hierbei spielt also die Rippenhöhe sowie die Stützenfuß-Geometrie. Die Varia-
49
5 Der supraleitende CH-Prototyp
tion der Rippenhöhe stellt eine Veränderung des Strompfades dar: Je höher die Rippen, desto länger wird dieser und desto kleiner werden die magnetischen Peakfelder. Darüber hinaus lässt sich noch eine reduzierende Wirkung auf das elektrische
Spitzenfeld beobachten, was durch eine homogenere Verteilung des Magnetfeldes
und damit auch des induzierten elektrischen Feldes erklärt werden kann. Ebenso
kann ein Absinken beider Peakfelder durch Vergrößerung der Oberfläche an den
Stützenfüßen erreicht werden (s. Abb. 5.2)
Weitere Simulationen beschäftigten sich mit dem Ziel das beschleunigende E-Feld
entlang der Strahlachse, das aufgrund der Randbedingungen vom Zentrum zu den
Tankdeckeln hin sinusoidal abnimmt, möglichst gleichmäßig zu verteilen.
Abbildung 5.2: Links: Variation der Rippenhöhe. Rechts: Veränderung der SützenfußGeometrie [45].
Abbildung 5.3: Longitudinales E-Feld bei Veränderung der Endzelle und optimiertem
g/L-Verhältnis [45].
50
Variiert wurden sowohl die Endzellenlänge als auch das Verhältnis Gap zu Driftstrecke. In Abb. 5.3 wird deutlich, dass eine flache Feldverteilung über diese einfachen Tuningmaßnahmen realisierbar ist. Nach der Fabrikation des Prototyps wurden zahlreiche Tests an der Struktur durchgeführt. Messungen zeigten jedoch auch
die Präsenz von Feldemittern, die die Kavität ab gewissen Feldpegeln zum Quenchen brachten.
Abbildung 5.4: Messung der Güte gegen den Feldgradienten [3].
Mit einer chemischen Behandlung der Oberfläche konnten diese Störstellen weitestgehend beseitigt und die Performance noch weiter gesteigert werden. Die anschließende Messung lieferte einen Gradienten von 7 MV/m entsprechend einer
effektiven Spannung von 5.6 MV, was für Strukturen in diesem Geschwindigkeitsbereich einen weltweiten Spitzenwert darstellt (s. Abb. 5.4).
Typ
β
Frequenz [MHz]
Zellen
Material
RRR
Länge [mm]
Durchmesser [mm]
Crossbar-H-Mode
0.1
360
19
Massives Niobblech
250
1048
272
G [Ω]
Q0 (BCS)
R a /Q0 [Ω]
R a /Q0 pro Zelle [Ω]
R a Rs [kΩ2 ]
E p /Ea
B p /Ea [mT/MV/m]
W/Ea [mJ/(MV/m)2 ]
56
1.3 · 109
3180
167
178
5.2
5.7
92
Tabelle 5.1: Kenngrößen des CH-Prototyps.
51
5 Der supraleitende CH-Prototyp
52
6 Simulationsrechnungen
Im folgenden Kapitel wird der Optimierungsprozess für die geplante supraleitende
CH-Kavität vorgestellt, die zu Testzwecken aus Kupfer mit der Resonanzfrequenz
von 330 MHz (siehe Kapitel 8) gefertigt wurde. Hierzu wurde als Ausgangsgeometrie eine CH-Struktur mit möglichst wenig Grundvoraussetzungen gewählt, um so
den Einfluss der Veränderungen an den einzelnen Modulen (wie Stützengeometrie,
Driftröhren, Rippen („Girder“), Endzellendesign und Tuner) am besten quantifizieren zu können.
Abbildung 6.1: Der Beginn des Optimierungsprozesses.
6.1 Veränderung der Girdergeometrie
Der erste Optimierungssschritt beinhaltete die Untersuchung verschiedener Girderhöhen (Girder = Träger, auf denen die Stützen montiert werden).
Für die Simulation wurden die Girderhöhen: 10 mm, 50 mm, 100 mm verwendet.
Gleichzeitig wurde ein statisches Tuning mittels Zylindern, die sich auf den Girdern
befinden und deren Höhe variierte, vorgenommen.
53
6 Simulationsrechnungen
Abbildung 6.2: Variation der Girderhöhe.
Zur Auswertung wurden anschließend die wichtigsten Parameter zusammengefasst:
Abbildung 6.3: Bp/Ea in Abhängigkeit von der Tunerhöhe.
Abbildung 6.4: Ep/Ea in Abhängigkeit von der Tunerhöhe.
Abbildung 6.5: Frequenzverschiebung bei 1 Tuner.
Abbildung 6.6: Frequenzverschiebung bei 8 Tunern.
In den Abb. 6.3 und 6.4 lässt sich erkennen, dass sich sowohl die magnetischen
als auch die elektrischen Spitzenfelder durch höhere Girder verringern lassen, was
im ersten Fall durch den vergrößerten Strompfad und im zweiten Fall durch die
flachere Feldverteilung begünstigt wird. Bei zu hoher Tunereinstellung erhöht sich
54
6.1 Veränderung der Girdergeometrie
das Verhältnis E p /Ea deutlich, weil die Tuner nahe an die Driftröhren reichen. Der
Einfluss der Tuner auf die Frequenz zeichnet sich in Abb. 6.5 und 6.6 ab. Zunächst
zeigt sich in den Simulationen ein leichter Frequenzhub, gefolgt von einem Frequenzabfall um mehrere MHz. Bedingt durch die geringere Entfernung der Tuner
zu den Driftröhren, setzt der kapazitive Effekt bei höheren Girdern früher ein.
Ein weiterer Aspekt bei der Optimierung war die seitliche Girderneigung. Untersucht wurden die Neigungen 60◦ , 75◦ und 90◦ .
Abbildung 6.7: Bp/Ea bei verschiedenen Girderneigungen.
Abbildung 6.8: Ep/Ea bei unterschiedlichen Girderneigungen.
Abbildung 6.9: Der Geometriefaktor in Abhängigkeit von der
Girderneigung.
Abbildung 6.10: R/Q für verschiedene Girderneigungen.
Die Simulationsergebnisse zeigen keine einheitliche Präferenz für einen der drei
Neigungswinkel. Berücksichtigt man noch die supraleitende Operation, so muss
gewährleistet sein, dass der Heliumfluss möglichst blasenfrei stattfindet, was einen
Winkel <90◦ vorteilhafter erscheinen lässt.
55
6 Simulationsrechnungen
6.2 Die Stützengeometrie
Bei der Wahl der Stützenfußgeometrie wurde wie schon beim Prototypen von einem elliptischen Querschnitt ausgegangen, jedoch mit vertauschter Orientierung
der Halbachsen. Denn für eine zukünftige, supraleitende Struktur muss ausreichend Platz zwischen den Stützen für große Tuner und Leistungskoppler gewährleistet sein. Bei der Simulation wurde für die große Halbachse (d.h. die Achse senkrecht zum Strahl) ein Wert von 28 mm festgelegt. Die Girderbreite beträgt an dieser
Stelle 75 mm. Die kleine Halbachse wurde mit verschiedenen Größen simuliert.
Zielsetzung bei der Variation der Stützengeometrie ist die Minimierung der ma-
Abbildung 6.11: Das Verhältnis BP /Ea bei Veränderung der in Strahlrichtung orientierten Halbachse.
gnetischen Spitzenfelder (das elektrische Feld wird nur sehr schwach davon beeinflusst). Als Resultat ergibt sich, dass durch Vergrößerung der kleinen Halbachse die
magnetischen Spitzenfelder reduziert werden können, weil dem Magnetfeld, welches in der Region des Stützenfußes hohe Werte annimmt, eine größere Oberfläche
geboten wird (s. Abb. 6.11).
56
6.3 Untersuchung der Driftröhren
6.3 Untersuchung der Driftröhren
In einer CH-Struktur befindet sich das elektrische Feld stark gebündelt auf der
Strahlachse zwischen den Driftröhren. Daher stellen diese auch den Schwerpunkt
bei der Reduzierung der elektrischen Spitzenfelder und der Gewährleistung einer
homogenen Feldverteilung dar. Die Apertur wird generell durch Strahldynamikrechnungen festgesetzt (dabei spielen die Teilchensorte, der Energiebereich und die
Art der Driftröhrensektion eine wichtige Rolle). Der Außendurchmesser ist der frei
Abbildung 6.12: Links: Elektrische Peakfelder bei 4mm Driftrohrdicke. Rechts: Elektrische Peakfelder bei 7mm Driftrohrdicke.
wählbare Parameter. Vergrößert man die Dicke der Röhren, so verteilt sich das elektrische Feld auf den Wülsten auf einer größeren Oberfläche und die Spitzenfelder
nehmen ab. Gleichzeitig wird das Feld auf der Strahlachse verringert und damit
die Shuntimpedanz kleiner. Für den supraleitenden Betrieb spielt die Shuntimpe-
Abbildung 6.13: Peakfelder bei Veränderung des Außendurchmessers Da .
57
6 Simulationsrechnungen
danz jedoch nur eine untergeordnete Rolle, da die Verluste sehr gering ausfallen.
Abb. 6.13 zeigt, wie das Verhältnis E p /Ea bei zunehmender Driftrohrdicke verbessert werden kann.
Modifizierung des g/L-Verhältnisses
Für eine möglichst effiziente Beschleunigung ist eine flache elektrische Feldverteilung auf der Achse erstrebenswert. Die H211 -Mode besitzt aufgrund der elektrischen Randbedingungen an den Tankdeckeln einen nach außen hin abnehmenden
sinusoidalen Verlauf (s. Abb. 6.14). Durch eine Anpassung des g/L-Verhältnisses
können lokal die Kapazitäten verändert und die elektrischen Felder in den Spalten
auf gleiches Niveau gebracht werden (s. Abb. 6.15).
Abbildung 6.14: Links: Querschnitt einer CH-Struktur mit konst. β und g/L = 0.5.
Rechts: Feldverteilung der H211 -Mode.
Abbildung 6.15: Links: Querschnitt einer CH-Struktur mit β-Profil und modifiziertem
g/L-Verhältnis. Rechts: Feldverteilung der durch Anpassung erzeugten H210 -Mode.
58
6.4 Untersuchung der Endzellengeometrie
6.4 Untersuchung der Endzellengeometrie
Die Endzelle einer CH-Struktur kann verwendet werden, um die Feldverteilung
in der restlichen Struktur zu beeinflussen. Wird dieser Bereich dazu angeregt, stärker zu schwingen, so verringert sich in den übrigen Spalten das elektrische Feld,
weil alle Zellen als miteinander gekoppelte Resonatoren aufgefasst werden können. Eine Möglichkeit besteht darin, das Resonatorvolumen dort lokal zu erhöhen.
Um die longitudinalen Abmessungen der Kavität beizubehalten, wurde der Endbereich des Tankes im Durchmesser vergrößert, indem er mit Wülsten versehen
wurde (s.Abb. 6.16).
Abbildung 6.16: Links: Modifizierter Tank mit vergrößertem Durchmesser im Endzellenbereich. Die Länge der Endzelle Le beträgt 82 mm, die Zellenlänge Li 72 mm. Rechts:
Feldverteilung des modifizierten Tanks.
Es zeigt sich, dass bei einer ca. 70%-igen Vergrößerung des Radius im Endzellenbereich verglichen zum Mittelteil eine flache Feldverteilung entsteht. Ein solches
Verhältnis erweist sich jedoch als technisch unpraktikabel. In Abschnitt 8.2 soll im
Rahmen der Messergebnisse eine neue, umsetzbare Methode zur longitudinalen
Verkürzung der Struktur und gleichzeitigen Gewährleistung der Feldflachheit vorgestellt werden.
59
6 Simulationsrechnungen
60
7 HF-Einkopplung
Damit ein Resonator Teilchen beschleunigen kann, muss HF-Leistung eingespeist
werden, was über einen Einkoppler geschieht. Zusätzlich wird zur Diagnose des
Resonanzverhaltens ein Auskoppler (Pickup) benötigt, der einen Teil der Leistung
aus der Kavität extrahiert. Entsprechend fließen diese bei der Betrachtung der Leistungsverluste des Systems mit ein. Man kann daher eine belastete Güte Q L definieren, die die Koppelmechanismen berücksichtigt:
QL =
ω0 W
.
Ptot
(7.1)
Ptot enthält sowohl die Verluste Pc an der Resonatoroberfläche als auch die emittierte Leistung Pe des Einkopplers und die transmittierte Leistung Pt des Pickup
Daraus erhält man
Ptot = Pc + Pe + Pt .
(7.2)
Pc + Pe + Pt
Ptot
=
.
ωW
ωW
(7.3)
Eingesetzt in die Definition der Güte folgt:
1
1
1
1
=
+
+ .
QL
Q0 Q e Q t
(7.4)
In der Praxis wird Pt sehr klein (und damit Qt sehr groß) gewählt, so dass die belastete Güte nur noch von der intrinsischen und der externen Güte abhängt. In
Abbildung 7.1 ist der Zusammenhang grafisch dargestellt.
61
7 HF-Einkopplung
Abbildung 7.1: Das Verhalten der belasteten Güte bei Veränderung der Einkopplung.
Für die intrinsische Güte wurde Q0 = 10.000 verwendet.
7.1 Induktive Kopplung
Die Umsetzung der Einkopplung kann auf verschiedene Weisen erfolgen: induktiv,
kapazitiv, über einen Hohlleiter oder galvanisch. Strukturen mit einer Betriebsfrequenz oberhalb von 1 GHz werden von einem Hohlleiter mit Leistung gespeist.
Niederfrequente Resonatoren verwenden meist eine Schleife oder, im supraleitenden Falle, einen Koaxialleiter. Bei der induktiven Kopplung wird mit einer Schleife,
die in das Resonatorinnere hineinragt, eingekoppelt. Dabei wird eine Position gewählt, bei der die Induktivität möglichst hoch ist. Bei einer CH-Struktur entspricht
das einem der vier Tanksegmente. Die Schleifenfläche durchdringt das Magnetfeld
des Resonators, und je nach Winkel und durchsetzter Fläche kann die externe Güte
und damit die Kopplung variiert werden:
Qe =
100W
ω ( As B0 cos α)2
,
(7.5)
mit W als gespeicherter Energie, ω als Betriebsfrequenz, As als Schleifenfläche, B0
als das Magnetfeld am Ort der Schleife und α dem Winkel der Schleifenfläche gegenüber dem Magnetfeld.
62
7.2 Kapazitive Kopplung
7.2 Kapazitive Kopplung
Bei supraleitenden Niederenergiebeschleunigern hat sich jedoch die kapazitive Einkopplung bewährt, da problemlos hohe Leistungen eingespeist werden können.
Die Kopplung erfolgt bei einer CH-Struktur über eine Bohrung durch einen der
Girder, durch die der Innenleiter eines Koaxialleiters in die Struktur hineinragt. Verlängert man den Innenleiter und verringert damit den Abstand zum elektrischen
Feld auf der Strahlachse, so nimmt die externe Güte ab und die Kopplungsstärke
erhöht sich. Die externe Güte lässt sich für diesen Fall berechnen über:
Qe =
W
,
50π 3 e02 f E2 a4
(7.6)
hierbei ist W die gespeicherte Engergie, f die Frequenz, E das elektrische Feld am
Ort des Kopplers und a der Kopplerinnenleiterradius.
7.3 Numerische Bestimmung von Qe
Eine analytische Bestimmung der externen Güte kann nur für einfache Geometrien
wie z.B. die Pillbox erfolgen. Bei komplexen Strukturen muss auf eine numerische
Näherung zurückgegriffen werden. Die nachfolgend vorgestellte Methode [46] erlaubt es die externe Güte bis auf einen Faktor von ≈ 2 zu approximieren. Geht man
von einer verlustfreien Kavität aus, die bei ihrer Resonanzfrequenz ω gespeicherte
Energie W enthält, so kann die Energie über einen Koppler ausströmen und der
Energieinhalt verringert sich exponentiell. Für die Leistung gilt:
1
Pe =
2η
ZZ
A
η
| E| dA =
2
2
ZZ
| H |2 dA
(7.7)
A
Integriert wird dabei über die Querschnittsfläche des Koaxialleiters. Die gespeicherte Energie W des Resonators lässt sich berechnen mit:
1
W=
2
ZZZ
V
1
e0 | E| dV =
2
2
ZZZ
µ0 | H |2 dV
(7.8)
V
63
7 HF-Einkopplung
Zusammen mit der Definition der externen Güte
Qe =
ωW
Pe
(7.9)
ergibt sich:
Qe =
ω
RRR
c
RR
2
V | E | dV
2
A | E | dA
=
ω
RRR
c
RR
V
| H |2 dV
2
A | H | dA
(7.10)
Die Berechnung der Güte erfordert jedoch die Anwendung von Codes, die Verluste berücksichtigen, welche jedoch langsamer und unbequemer in der Handhabung
sind als nicht dissipative Codes. Daher wird die Zeit umgekehrt und man erhält
eine zweite Lösung der Maxwellgleichungen, bei der die Kavität von einer einlaufenden Welle Energie gewinnt. Durch die Überlagerung beider Lösungen erhält
man aus den beiden Wanderwellen durch Addition und Subtraktion jeweils eine
stehende Welle. Für die Simulation bedeutet dies, dass zwei Rechnungen mit unter-
Abbildung 7.2: Superposition beider Wellen zu einer stehenden Welle [46].
schiedlichen Randbedingungen durchgeführt werden müssen. Man wählt z.B. eine
magnetische Randbedingung, da hier keine tangentialen magnetischen Felder, sondern nur tangentiale elektrische Felder an der Referenzebene existieren. Die Amplitude der Stehwelle ist entsprechend doppelt so groß wie die der einzelnen Wellen.
Im Resonator ergibt sich eine Phasenverschiebung φ, so dass die Amplitude des
resultierenden Feldes 1 + eiφ mal so groß ist wie die des ursprünglichen Feldes.
Man kann also für dieses Zwischenergebnis Q1 (mit E1 als resultierendem Feld an
der Referenzebene) definieren:
Q1 =
ω
RRR
c
RR
2
V | E1 | dV
2
A | E1 | dA
=
ω
RRR 1 + eiφ 2 | E|2 dV
1 + eiφ 2
V
=
Qext
RR
4
c A 4 | E|2 dA
(7.11)
Verwendet man dagegen eine elektrische Randbedingung, so existieren nur tangentiale Magnetfelder an der Referenzebene. Gemäß der Phasenverschiebung im
64
7.3 Numerische Bestimmung von Qe
Resonator erhält man dieses Mal jedoch 1 − eiφ mal den Wert der Einzelwellen.
Für Q2 ergibt sich somit:
Q2 =
ω
RRR
c
RR
2
V | H1 | dV
2
A | H1 | dA
=
ω
RRR 1 − eiφ 2 | H |2 dV
1 − eiφ 2
V
=
Qext
RR
4
c A 4 | H |2 dA
(7.12)
Unter Zuhilfenahme der Gleichung
2 2
iφ iφ 1 + e + 1 − e = 4
(7.13)
Q1 + Q2 = Qext
(7.14)
folgt für die externe Güte:
Die Größe Q1 lässt sich auch noch umschreiben zu:
1
2 ωe0
RR
1
e
c
0
2
RRR
Q1 =
| E1 |2 dV
2
| E1 | dA
=
2ωW
RR
e0 c
| E1 |2 dA
(7.15)
Zur Berechnung des Integrals im Nenner nutzt man aus, dass das Feld azimuthalsymmetisch ist und reziprok mit dem Radius r abfällt. Man kann also mit einem
beliebigen Wert r0 und dem dazugehörigen Feld E0 das Integral berechnen und
erhält:
2fW
(7.16)
Q1 =
2
e0 cr0 | E0 |2 ln( rr21 )
Entsprechend geht man beim Magnetfeld und Q2 vor und kommt auf:
Q2 =
2µ0 f W
2
cr0 | B0 |2 ln( rr21 )
(7.17)
Die Addition dieser beiden Simulationswerte liefert
2fW
Qe = 2
cr0 ln( rr21 )
1
e0 | E0 |2
+
µ0
| B0 |2
!
(7.18)
65
7 HF-Einkopplung
66
8 Messungen am Kupfermodell
Um die Simulationsergebnisse an einer realen Struktur zu validieren, wurde in
der Werkstatt des IAP ein Modell aus Kupfer angefertigt, das die Vorlage für eine
nächste supraleitende Kavität darstellt. Bei diesem Modell wurde ein besonderes
Augenmerk auf die Modularität der einzelnen Bauteile gelegt.
Abbildung 8.1: Links: Stütze mit Driftröhreneinsatz. Mitte: Zwei zusammengesetzte
Rippenmodule. Rechts: Komplette Struktur.
Als Driftröhren werden längenvariable, ringförmige Spangen verwendet, die in die
Stützen eingesetzt werden. Die Stützen können entlang einer Nut auf den Rippen
bewegt und durch eine Madenschraube, die ein Aufspreizen der Stützenfüße bewirkt, fixiert werden. Die gesamte Struktur ist in der Länge variabel, indem Rippen
miteinander verschraubt werden können. Des Weiteren kann durch Verschiebung
der Enddriftröhre der Spaltabstand der letzten Zelle variiert werden. Die Einkopplung erfolgt entweder über zwei gegenüberliegende 35 mm Bohrungen in den Rippen per kapazitiver Kopplung oder über einen Flansch, der auf einem TankblechSegment montiert ist, per Koppelschleife. Für das Pickup-Signal existiert eine 20
mm Rippenbohrung.
67
8 Messungen am Kupfermodell
β
Frequenz [MHz]
Zellen
Länge [mm]
Durchmesser [mm]
Güte [gemessen]
Material
0.1 (var.)
332
10 (var.)
570 (var.)
330
6500
Kupfer
Tabelle 8.1: Daten des Kupfermodells.
Folgende Messreihen wurden im Rahmen der vorliegenden Arbeit durchgeführt:
• Frequenztuning durch Variation der Endzellen
• Messung des elektrischen Feldes auf der Achse
– ohne β-Profil
– mit β-Profil
– mit β-Profil und modifiziertem g/L-Verhältnis
– mit schrägen Endstützen
• Verlauf der externen Güte
– mit verschiedenen Kopplerlängen
– mit unterschiedlichen Kopplerdurchmessern
8.1 Frequenztuning
Das Tunen der Frequenz über das Drücken auf die Tankdeckel hat sich bereits beim
supraleitenden Prototypen als probates Mittel erwiesen.
Diese Methode wurde beim Kupfermodell simuliert durch das Hineinbewegen der
Enddriftrohre (s. Abb. 8.2). Dadurch verkürzt sich der letzte Spalt und die Kapazität wird erhöht, was eine Frequenzverringerung zur Folge hat. Entsprechend führt
ein Herausziehen zu einer Frequenzerhöhung. In Abb. 8.3 zeigt sich wie auf diese
Weise eine Frequenzvariation von ca. 5 MHz erzielt werden kann.
68
8.2 Messung verschiedener Feldverteilungen
Abbildung 8.2: Messung der Frequenzverschiebung duch Verkürzen / Verlängern der
Endzelle.
Abbildung 8.3: Die Verlängerung der Enddriftrohre führt zu einem Abfallen der Frequenz.
8.2 Messung verschiedener Feldverteilungen
Die Vermessung der axialen elektrischen Felder wurde mit Hilfe der Störkörpermethode durchgeführt: Eine Teflonkugel wird über einen motorgetriebenen Nylonfaden entlang der Zylinderachse durch den Resonator gezogen. Gemäß des SlaterTheorems führt das Einbringen eines Störkörpers des Volumens ∆V in eine Kavität
zu einer Frequenzverschiebung ∆ω0 in Abhängigkeit vom elektrischen Feld E und
Magnetfeld H am Ort des Störkörpers [47]:
∆ω0
3∆V er − 1
µr − 1
2
2
=−
e0 E +
µ0 H
ω0
4U er + 2
µr + 2
(8.1)
69
8 Messungen am Kupfermodell
Gap No.
1
2
3
4
5
6
7
8
9
10
Abbildung 8.4: Feldverteilung bei konstantem β = 0.1, g/L = 0.5.
rel. Spann. (sim. / gem.)
0.47 / 0.44
0.70 / 0.67
0.85 / 0.82
0.94 /0.95
1/1
1 / 0.99
0.94 / 0.95
0.84 / 0.85
0.70 / 0.68
0.46 / 0.45
Tabelle 8.2: Relative Spannungen der simulierten und gemessenen Feldverteilung ohne β-Profil (normiert auf Umax ).
Da Teflon ein Dielektrikum ist (µr = 1), wird nur das elektrische Feld beeinflusst:
∆ω0
3∆V er − 1
e0 E 2
=−
ω0
4U er + 2
(8.2)
Damit ist es möglich über die durch den Störkörper verursachte Frequenzverschiebung eine quantitative Aussage über die Feldverteilung zu machen, sofern die Störkörpereigenschaften bekannt sind.
Gap No.
1
2
3
4
5
6
7
8
9
Abbildung 8.5: Feldverteilung bei ansteigendem β-Profil, g/L = 0.5.
rel. Spann. (sim. / gem.)
0.48 / 0.55
0.79 / 0.80
0.94 / 0.95
1/1
0.99 / 96
0.92 / 0.93
0.79 / 0.80
0.62 / 0.64
0.34 / 0.34
Tabelle 8.3: Relative Spannungen der simulierten und gemessenen Feldverteilung mit β-Profil (normiert auf Umax ).
Zum Zeitpunkt des Experimentieraufbaus stand kein Störkörper mit bekannter
70
8.2 Messung verschiedener Feldverteilungen
Gap No.
1
2
3
4
5
6
7
8
9
Abbildung 8.6: g/L-optimierte Feldverteilung mit β-Profil.
rel. Spann. (sim. / gem.)
0.66 / 0.71
0.84 / 0.74
0.94 / 0.95
0.99 /0.98
1/1
0.99 / 0.87
0.91 / 0.95
0.82 / 0.90
0.64 / 0.71
Tabelle 8.4: Relative Spannungen der simulierten und gemessenen Feldverteilung bei mod. g/L-Verhältnis (normiert
auf Umax ).
Störkörperkonstanten zur Verfügung. Die nachfolgenden Messergebnisse geben demnach einen qualitativen Einblick in die Feldverteilung des Kupferresonators. Zunächst wurde β = 0.1 und ein konstantes g/L-Verhältnis (Spalt zu Zellenlänge)
von 0.5 gewählt. Gemäß der H-Moden-Theorie bildet sich die H211 -Mode aus, deren Amplitude nach außen hin sinusoidal abnimmt (s. Abb. 8.4). Durch Veränderung der Stempositionen und der Driftrohrlängen kann das Geschwindigkeitsprofil des Resonators verändert werden. Dies ist bei real betriebenen Kavitäten notwendig, damit das elektrische Feld weiterhin synchron mit dem beschleunigten
Teilchenbunch ist. Für die anschließende Messung wurde ein gleichmäßiger EnerSpaltnr.
1
2
3
4
5
6
7
8
9
Länge [mm] (unmod./mod.)
22.53 / 11.53
23.26 / 19.26
23.97 / 22.72
24.65 / 24.65
25.31 / 24.31
25.96 / 23.46
26.59 / 21.34
27.20 / 17.20
27.80 / 9.80
Driftröhrennr.
1
2
3
4
5
6
7
8
Länge [mm] (unmod./mod.)
22.90 / 30.40
23.61 / 26.24
24.31 / 24.94
24.98 / 25.48
25.63 / 27.38
26.27 / 30.15
26.90 / 34.53
27.50 / 41.50
Tabelle 8.5: Driftröhren-/Spalttabelle der unmodifizierten / modifizierten Feldverteilung mit β-Profil.
71
8 Messungen am Kupfermodell
giezuwachs von 3 MeV simuliert. Die Gap- und Driftlängen verlängerten sich dadurch, und die Anzahl der Zellen musste aufgrund der begrenzten Tanklänge auf
9 reduziert werden. In Abb. 8.5 wird deutlich, dass durch diese Maßnahme das
elektrische Feld im weiteren Verlauf absinkt, weil die Spaltlängen größer werden.
Diesem Effekt kann entgegengewirkt werden durch eine Anpassung der Spalt-zuDriftrohrverhältnisse, wobei die Position der Spaltmitten unverändert bleibt. Es ergibt sich eine flache Feldverteilung (siehe Abb. 8.6).
Einsatz von schrägen Endstützen
Eine neue Methode zur Optimierung des elektrischen Feldverlaufes kam beim Kupfermodell zum Einsatz. Die Endstützen am Kavitätsein- und ausgang wurden durch
schräge Stützen ersetzt (s. Abb. 8.7).
Abbildung 8.7: Bild vom Endzellenbereich mit schräger Stütze.
Dadurch kann im Endzellenbereich zusätzliches Volumen für das magnetische Feld
gewonnen werden, was einem ähnlichen Effekt entspricht wie der Verlängerung
des Tanks / des Enddriftrohres beim supraleitenden Prototypen. Das elektrische
Feld erhöht sich somit im Endbereich, während es sich im mittleren Segment verringert. In Abb. 8.8 zeigt sich ein im Vergleich zum Ausgangsmodell flacheres Feldprofil. Bei der Justierung der Endstützen ließen sich Verkippungen / Verkantungen
nicht vollständig eliminieren, wodurch sich die Abweichung zur Simulation gerade in diesem Bereich erklären lässt. Die prinzipielle Tendenz lässt sich dennoch gut
erkennen.
72
8.3 Bestimmung der externen Güte
Gap No.
1
2
3
4
5
6
7
8
9
10
Abbildung 8.8: Messung und Simulation der Feldverteilung mit schrägen Endstützen.
rel. Spann. (sim. / gem.)
0.54 / 0.49
0.78 / 0.80
0.88 / 0.93
0.96 /0.94
1 / 0.99
1/1
0.96 / 0.96
0.88 / 0.94
0.78 / 0.79
0.54 / 0.40
Tabelle 8.6: Relative Spannungen der simulierten und gemessenen Feldverteilung mit schrägen Endstützen (normiert
auf Umax ).
8.3 Bestimmung der externen Güte
Für eine spätere, supraleitende Kavität ist es wichtig den Kopplungsbereich zu ermitteln. Die unbelastete Güte einer solchen Struktur liegt typischerweise in der
Größenordnung 108 − 109 . Einem beschleunigten Teilchenstrahl kann ebenfalls eine Güte zugeordnet werden, da dieser wie eine Last anzusehen ist. Diese Güte be-
Abbildung 8.9: Links: Kopplerdurchmesser von 9,2 bis 19,2 mm. Rechts: Kopplerlängen von 35 bis 95 mm.
trägt etwa 105 , wodurch sich die belastete Güte auf eben diesen Wert verringert.
Für eine kritische Ankopplung muss demnach eine externe Güte von 105 erziel-
73
8 Messungen am Kupfermodell
Abbildung 8.10: Veränderung der externen Güte durch Verlängerung des Kopplerinnenleiters.
bar sein, damit ein stabiler Strahlbetrieb möglich ist. Für das Kupfermodell wurde
ein Satz verschiedener Kopplerlängen und -durchmesser angefertigt (s. Abb. 8.9).
Bei der ersten Messreihe wurde die Kopplerlänge von 35 bis 95 mm variiert. Die
Position „0“ markiert die bündige Position des Kopplers mit der Girderoberfläche
(entspricht einer Höhe von 55 mm). In Abb. 8.10 lässt sich gut der exponentielle
Abfall der externen Güte als Funktion der Kopplerlänge beobachten. Bei der kürzesten Kopplerlänge war die Ankopplung sehr schwach (Qext ≈ 109 ), wogegen sie
bei der Kopplerlänge von 95 mm stärker (Qext ≈ 105 ), jedoch immernoch unter-
Abbildung 8.11: Veränderung der externen Güte durch Vergrößerung des Innenleiterradius.
74
8.3 Bestimmung der externen Güte
koppelt war. Leider eignet sich die Simulation nicht zur exakten Bestimmung der
externen Güte, weil die grundsätzlichen Annahmen bezüglich der Feldgeometrie
auf der Kopplerstirnfläche idealisiert sind. Jedoch kann die richtige Größenordnung und damit die Abmessung des Kopplers abgeschätzt werden.
Für die zweite Messreihe wurde eine fixe Kopplerlänge von 55 mm verwendet und
der Durchmesser von 9,2 bis 19,2 mm verändert. Abb. 8.11 zeigt, dass der grundsätzliche Verlauf der Simulations- und der Messkurve übereinstimmen. Eine Vergrößerung des Kopplerdurchmessers führt zu einer Verringerung der externen Güte. Die Absolutwerte der externen Güte weichen um den Faktor 3 bis 5 voneinander ab, was auch hier in der nur approximativen Simulationsmethode begründet
liegt.
75
8 Messungen am Kupfermodell
76
9 Ausblick
Die Messungen am supraleitenden Prototypen und am Kupfermodell haben ein
solides Fundament für die CH-Struktur gelegt und eröffnen Wege für weitere Entwicklungsmaßnahmen. Der nächste Schritt wird der Betrieb mit Strahl sein. Eine
Testgelegenheit bietet hierfür der GSI-Unilac, in welchem 10 mA U 28+ -Kerne beschleunigt werden. Der anvisierte Einsatzbereich für die neue CH-Struktur liegt
bei einer Energie von 11.4 AMeV (β = 0.1545) und befindet sich hinter der bestehenden Alvarez-Sektion (s. Abb. 9.2). Hierzu wurde bereits eine kompakte 7-zellige
Struktur entwickelt (s. Abb. 9.1). Neue technische Aspekte werden darin einfließen.
Das dynamische Frequenztuning findet im Inneren der Struktur über zwei Membrantuner statt, ein langsamer Tuner zur groben Regelung im kalten Betrieb und
ein schneller Tuner zur Kompensation von Mikrophonie / Druckvariation des Heliumbades / Lorentzkraftverstimmung während des Strahlbetriebes.
Abbildung 9.1: Simulationsansicht der neuen CH-Struktur für den GSI-Unilac.
Weiterhin wird die Struktur longitudinal verkürzt sein, da die Feldflachheit über
den Einsatz von schrägen Stützen gewährleistet wird. Die Stützenfußgeometrie
wird verglichen mit dem CH-Prototyp um 90◦ gedreht sein, um genügend Raum
77
9 Ausblick
β
Frequenz [MHz]
Zellen
Länge (βλ-Def.) [mm]
Durchmesser [mm]
Ea [MV/m]
E p /Ea
B p /Ea [mT/(MV/m)]
G [Ω]
Ra /Q0
Ra Rs [Ω2 ]
0.1545
325.224
7
505
356
5
5.1
13
64
1248
80000
Tabelle 9.1: Die wichtigsten Parameter der neuen supraleitenden CH-Struktur.
für Tuner und Koppler zu schaffen. Für Präparationszwecke sind an den Tankabschlüssen jeweils 2 Flansche angebracht, über welche Reinigungsdüsen eingeführt
werden können. Mechanische Stabilität wird durch Fixierungsringe an den Tankenden sowie durch Querstreben in den Rippenwannen geschaffen. Aufgrund der
kompakten Ausmaße ist die Struktur kaum anfällig für mechanische Einflüsse. Sie
verfügt über eine konstante Zellenlänge, wodurch eine unkomplizierte Strahlführung möglich wird. Ausführliche Simulationen bezüglich thermischer und mechanischer Belastungen stehen noch aus. Der Beginn der Fabrikation steht unmittelbar bevor und könnte einen Meilenstein für zukünftige Dauerstrich-Projekte im
Nieder- / Mittelenergiebereich darstellen.
Abbildung 9.2: Schematischer Überblick des GSI-Unilac. Die neue CH-Struktur kann
in den Bereich hinter der Alvarez-Sektion (blau) eingebunden werden. Eine weitere,
geplante CH-Struktur ist für den supraleitenden Bereich des CW-Linac (gelb) vorgesehen.
Die zweite Testmöglichkeit für das neue CH-Design wird der Dauerstrich-Linac
(SHE-Linac) an der GSI sein, bei dem Teilchen mit einem Masse-zu-Ladungsverhältnis
von 6 beschleunigt werden. Dieser Bereich umfasst den Hochladungs-Injektor und
eine anschließende supraleitende Sektion bestehend aus 9 Kavitäten bei einer Fre-
78
Abbildung 9.3: Ansicht der geplanten Kavität Nr. 5 für den supraleitenden Bereich des
SHE-Linac.
quenz von 216.96 MHz (s. Abb. 9.2). Die Resonatoren 4-9 sind dabei energievariabel ausgelegt und können Teilchen auf 3.5 bis 7.5 AMeV beschleunigen. Erste
HF-Simulationen wurden bereits für die fünfte Kavität durchgeführt (s. Abb. 9.3).
Die Parameter der Struktur sind in Tabelle 9.2 dargestellt.
β
Frequenz [MHz]
Zellen
Länge (βλ-Def.) [mm]
Durchmesser [mm]
Ea [MV/m]
0.092
217.96
10
642
470
5.1
Tabelle 9.2: Parameter der 5. Kavität des CW-Linac.
79
9 Ausblick
80
Tabellenverzeichnis
2.1
Parameter von Niob . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
3.1
Skalierung der Parameter im supra- und normalleitenden Betrieb bei
Variation der transversalen Abmessungen . . . . . . . . . . . . . . . .
39
4.1
4.2
Nullstellen der Besselfunktion. . . . . . . . . . . . . . . . . . . . . . .
Nullstellen der Ableitung der Besselfunktion. . . . . . . . . . . . . . .
44
44
5.1
Kenngrößen des CH-Prototyps. . . . . . . . . . . . . . . . . . . . . . .
51
8.1
8.2
Daten des Kupfermodells. . . . . . . . . . . . . . . . . . . . . . . . . .
Relative Spannungen der simulierten und gemessenen Feldverteilung ohne β-Profil (normiert auf Umax ). . . . . . . . . . . . . . . . . .
Relative Spannungen der simulierten und gemessenen Feldverteilung mit β-Profil (normiert auf Umax ). . . . . . . . . . . . . . . . . . .
Relative Spannungen der simulierten und gemessenen Feldverteilung bei mod. g/L-Verhältnis (normiert auf Umax ). . . . . . . . . . . .
Driftröhren-/Spalttabelle der unmodifizierten / modifizierten Feldverteilung mit β-Profil. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Relative Spannungen der simulierten und gemessenen Feldverteilung mit schrägen Endstützen (normiert auf Umax ). . . . . . . . . . .
68
73
Die wichtigsten Parameter der neuen supraleitenden CH-Struktur. .
Parameter der 5. Kavität des CW-Linac. . . . . . . . . . . . . . . . . .
78
79
8.3
8.4
8.5
8.6
9.1
9.2
70
70
71
71
81
Tabellenverzeichnis
82
Abbildungsverzeichnis
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
1.10
1.11
1.12
1.13
1.14
1.15
Elektrostatischer Beschleuniger [4]. . . . . .
Cockroft-Walton- / Marx-Generator . . . .
Van de Graaff-Beschleuniger. . . . . . . . .
Tandem-Beschleuniger. . . . . . . . . . . . .
Wideröe-Linac [9]. . . . . . . . . . . . . . . .
Elektrisches Feld in einer Alvarez-Struktur.
Disc-loaded Waveguide („Runzelröhre“). .
Elliptische Kavität . . . . . . . . . . . . . . .
Helix-Struktur / Splitring-Resonator . . . .
QWR / HWR / Spoke . . . . . . . . . . . .
IFMIF . . . . . . . . . . . . . . . . . . . . . .
Linac-Vorschlag des IAP für IFMIF . . . . .
Radiotoxizität von Uran . . . . . . . . . . .
Linac-Abschnitt von EUROTRANS . . . . .
Layout von EUROTRANS . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6
6
7
8
9
9
10
11
12
13
14
15
16
16
17
2.1
2.2
2.3
2.4
2.5
2.6
20
22
23
25
26
2.7
Meissner-Ochsenfeld Effekt . . . . . . . . . . . . . . . . . . . . . . . .
Modell eines Polaron . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Besetzungsdichte bei einem Normalleiter / Supraleiter . . . . . . . .
Magnetisierungskurve eines Typ I Supraleiters. . . . . . . . . . . . . .
Magnetisierungskurve eines Typ II Supraleiters. . . . . . . . . . . . .
Eingeschlossene Magnetfelder im Supraleiter. Die Felder sind umgeben von einem normalleitenden Kern, welcher für die Verluste verantwortlich ist. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Die belastete Güte in Abhängigkeit vom Feldgradienten. . . . . . . .
28
30
3.1
Feldverteilung in einem Spalt . . . . . . . . . . . . . . . . . . . . . . .
33
4.1
IH-Struktur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
83
Abbildungsverzeichnis
4.2
CH-Struktur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
5.1
Frontansicht des aus Niob gefertigten 360MHz CH-Prototypen. . . .
49
5.2
Spitzenfelder in Abhängigkeit von der Rippenhöe und der Stützengeometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
50
Longitudinales E-Feld bei Veränderung der Endzelle und optimiertem g/L-Verhältnis [45]. . . . . . . . . . . . . . . . . . . . . . . . . . .
50
5.4
Messung der Güte gegen den Feldgradienten [3]. . . . . . . . . . . . .
51
6.1
Der Beginn des Optimierungsprozesses. . . . . . . . . . . . . . . . . .
53
6.2
Variation der Girderhöhe. . . . . . . . . . . . . . . . . . . . . . . . . .
54
6.3
Bp/Ea in Abhängigkeit von der Tunerhöhe. . . . . . . . . . . . . . . .
54
6.4
Ep/Ea in Abhängigkeit von der Tunerhöhe. . . . . . . . . . . . . . . .
54
6.5
Frequenzverschiebung bei 1 Tuner. . . . . . . . . . . . . . . . . . . . .
54
6.6
Frequenzverschiebung bei 8 Tunern. . . . . . . . . . . . . . . . . . . .
54
6.7
Bp/Ea bei verschiedenen Girderneigungen. . . . . . . . . . . . . . . .
55
6.8
Ep/Ea bei unterschiedlichen Girderneigungen. . . . . . . . . . . . . .
55
6.9
Der Geometriefaktor in Abhängigkeit von der Girderneigung. . . . .
55
6.10 R/Q für verschiedene Girderneigungen. . . . . . . . . . . . . . . . . .
55
6.11 BP /Ea für verschiedene Stützengeometrien . . . . . . . . . . . . . . .
56
6.12 Peakfeld in Abhängigkeit von der Driftrohrdicke . . . . . . . . . . . .
57
6.13 Peakfelder bei Veränderung des Außendurchmessers Da . . . . . . . .
57
6.14 Feldverteilung der H211 -Mode . . . . . . . . . . . . . . . . . . . . . . .
58
6.15 Modifizierte Feldverteilung der H210 -Mode . . . . . . . . . . . . . . .
58
6.16 Modifizierter Tank mit Wülsten . . . . . . . . . . . . . . . . . . . . . .
59
7.1
Kopplungsabhängigkeit der belasteten Güte . . . . . . . . . . . . . .
62
7.2
Superposition beider Wellen zu einer stehenden Welle [46]. . . . . . .
64
8.1
Bilder des Kupfermodells . . . . . . . . . . . . . . . . . . . . . . . . .
67
8.2
Frequenztuning am Kupfermodell . . . . . . . . . . . . . . . . . . . .
69
8.3
Frequenztuning - Messung und Simulation . . . . . . . . . . . . . . .
69
8.4
Feldverteilung ohne Beta-Profil . . . . . . . . . . . . . . . . . . . . . .
70
8.5
Feldverteilung mit Beta-Profil . . . . . . . . . . . . . . . . . . . . . . .
70
8.6
Feldverteilung mit Beta-Profil, g/L-optimiert . . . . . . . . . . . . . .
71
8.7
Kavität mit schräger Stütze . . . . . . . . . . . . . . . . . . . . . . . .
72
8.8
Messung / Simulation mit schrägen Endstützen . . . . . . . . . . . .
73
5.3
84
Abbildungsverzeichnis
8.9
Links: Kopplerdurchmesser von 9,2 bis 19,2 mm. Rechts: Kopplerlängen von 35 bis 95 mm. . . . . . . . . . . . . . . . . . . . . . . . . .
8.10 Veränderung der externen Güte durch Verlängerung des Kopplerinnenleiters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.11 Veränderung der externen Güte durch Vergrößerung des Innenleiterradius. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1
9.2
9.3
Simulationsansicht der neuen CH-Struktur für den GSI-Unilac. . . .
Schema des GSI-Unilac . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ansicht der geplanten Kavität Nr. 5 für den supraleitenden Bereich
des SHE-Linac. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
74
74
77
78
79
85
Abbildungsverzeichnis
86
Danksagung
An dieser Stelle möchte ich mich herzlich bei allen Personen bedanken, die zum
erfolgreichen Abschluss dieser Arbeit einen großen Beitrag geleistet haben.
Herrn Prof. Dr. Ulrich Ratzinger für die frühe und freundliche Aufnahme am IAP
und die Gelegenheit als Hilfswissenschaftler zu arbeiten. Ebenso danke ich ihm für
das stete, große Interesse an meiner Arbeit und für seine fachliche Unterstützung.
Priv. Doz. Dr. Holger Podlech für seine Diskussionsbereitschaft in allen physikalischen und auch nicht-physikalischen Belangen. Danke für die sehr lehrreichen
Snowboardstunden in Riezlern und für die Abhandlungen über Whiskeysorten
und Bergsteigen.
Prof. Dr. Horst Klein für seine Ratschläge und die Möglichkeit in Belgien am Workshop teilzunehmen.
Dem Techniker und Mann für alle Fälle Daniel Bänsch für die schnelle und genaue
Umsetzung der Pläne für das Kupfermodell und für seine kameradschaftliche Verbundenheit.
Dr. Holger Liebermann für die Beantwortung vieler Fragen hinsichtlich der Simulationen und auch anderweitiger Probleme EDV-technischer Natur.
Der Institutswerkstatt für die zügige und präzise Realisierung des Kupfermodells.
Meinen Zimmergenossen Dr. Alexander Bechtold und Dr. Chuan Zhang für ein
sehr angenehmes Arbeitsklima.
Allen Mitgliedern der LINAC-AG, die einen frischen Wind in die Arbeitsgruppe
gebracht haben.
87
Danksagung
Der benachbarten NNP-Gruppe, deren Mitglieder stets hilfsbereit waren und ein
offenes Ohr hatten.
Meinen Eltern, die für mein leibliches und finanzielles Wohl gesorgt haben und somit dieses Studium überhaupt erst ermöglichten.
Besonders möchte ich meiner Freundin Paulina danken, die mich in allen Situationen mit ihrer Liebe unterstützt hat.
88
Literaturverzeichnis
Literaturverzeichnis
[1]
R ATZINGER, U.: Effiziente Hochfrequenz-Linearbeschleuniger für leichte und schwere Ionen, Gesellschaft für Schwerionenforschung mbH, Habilitationsschrift,
1998
[2]
P ODLECH, H. et al.: Superconducting CH-Structure. In: Phys. Rev. STAB 080101
(2007), S. 10
[3]
P ODLECH, H.: Entwicklung von normal- und supraleitenden CH-Strukturen zur
effizienten Beschleunigung von Protonen und Ionen, Universität Frankfurt, Institut
für Angewandte Physik, Habilitationsschrift, 2008
[4]
W ILLE, Klaus: Physik der Teilchenbeschleuniger und Synchrotonstrahlungsquellen.
2. Auflage. Teubner Studienbücher, 1996
[5]
C OCKROFT, J.D. ; WALTON, E.T.S.: ’Experiments with high velocity ions’. In:
Proc. Roy. Soc., 1932 (A136), S. 619–620
[6]
B ELLASCHI: Trans. AIEE. 1932. – 51, 936
[7]
V. D .G RAAFF, R.J.: Phys. Rev. 1931. – 38, 1919A
[8]
W IDERÖE, R.: Arch. f. Electrotech. 1928. – 387, 21
[9]
R OSSBACH, J.: Vorlesungsskript: Teilchenbeschleuniger
[10] A LVAREZ, L.: The Design of a Proton Accelerator. In: Phys. Rev. 799 (1946),
S. 70
[11] A LVAREZ, L. et al.: Rev. Sci. Instr. 1955. – 26, 111/210
[12] H ANSEN, W.W. et al.: Rev. Sci. Instrum. 1955. – 26, 134
[13] P IERCE, J.M. et al.: Proceedings of the 9th International Conference on Low Temperature Physics, Vol. A Plenum. 1965. – p. 36
89
Literaturverzeichnis
[14] PADAMSEE, H. ; K NOBLOCH, J. ; H AYS, T.: RF Superconductivity for Accerlerators,
Second Edition. Wiley-VCH, 2008
[15] B RANDELIK, A. et al.: Part. Accel. 1972. – 4:3
[16] B ENAROYA, R. et al.: IEEE Trans. Magn. 1975. – 11:413
[17] D ICK, G.J. et al.: Nucl. Instrum. Methods. 1976. – 138:203
[18] N OÉ, J. et al.: IEEE Trans. Nucl. Sci. 1977. – 23:1144
[19] B EN -Z VI, I. ; B RENNAN, J.: Nucl. Instr. Methods Phys. Res. 1983. – 212:73
[20] http://www.scienceandjobsformichigan.com
[21] O STROUMOV, P.N.: Accelerators for the Advanced Exotic Beam Facility in the
US. In: Proc. of Particle Accelerators Conference, Albuquerque, NM, USA, 2007, S.
p. 1664–1666
[22] Isotope Science Facility at Michigan State University. Technical Report MSUCL1345, NSCL-MSU. 2006
[23] W U, X. ; B OLLEN, G. et al.: Beam Dynamics Studies of the Reaccelerator of
Low Energy RIBS at the NSCL. In: Proc. 2007 Particle Accelerator Conference,
Albuquerque, NM, USA, 2007, S. p. 142–144
[24] J UNQUERA, T. ; B ERTRAND, P. et al.: The High Intensity Superconducting Linac for the SPIRAL2 Project at GANIL. In: Proc. Linear Accelerator Conference,
Albuquerque, NM, USA, 2007, S. p. 3588–3590
[25] Z ENERE, D. ; FACCO, A. ; S CARPA, F.: Progress in the ALPI-PIAVE Low-beta
Section Upgrade. In: Proc. European Particle Accelerator Conference, Genoa, Italy,
2008
[26] L AXDAL, R.E.: Initial Commisioning Results from the ISAC-II SC Linac. In:
Proc. Linear Accelerator Conference, Knoxville, Tennessee, USA, 2006
[27] N AGLER, A. ; M ARDOR, I. ; B ERKOVITS, D.: Status of the SARAF Project. In:
Proc. Linear Accelerator Conference, Knoxville, Tennessee, USA, 2006
[28] IFMIF Comprehensive Design Report. Technical Report, IFMIF International
Team, International Energy Agency, 2004
90
Literaturverzeichnis
[29] P ODLECH, H. et al.: The Superconducting Linac Approach for IFMIF. In: Proc.
of Particle Accelerators Conference, Albuquerque, NM, USA, 2007, S. 1434–1436
[30] The European Roadmap for Developing ADS for Nuclear Waste Incinertation. Technical Report ISBN 88-8286-008-6,ENEA, 2001
[31] Z HANG, C. et al.: Konus Dynamics And H-Mode DTL Structures For EUROTRANS And IFMIF. In: Proc. of European Particle Accelerator Conference, Genoa,
Italy, 2008, S. 3239–3241
[32] O NNES, H.K.: Proc. Roy. Acad. Amesterdam. 1908. – 168, 11
[33] O NNES, H.K.: Proc. Roy. Acad. Amesterdam. 1911. – 120b
[34] B ARDEEN, J. ; C OOPER, L.N. ; S CHRIEFFER, J.R.: Phys. Rev. 1957. – 1175, 108
[35] K ATHKE, M.: Supraleitung, eine Einführung. Seminarvortrag, 1998
[36] F OWLER, R. H. ; N ORDHEIM, L.: Proc. R. Soc. London A. In: Math. Phys. Sci.
119 (1928), S. 173
[37] WANGLER, Thomas P.: RF Linear Accelerators. 2.Auflage. Wiley-VCH, 2008
[38] R ATZINGER, U. et al.: The Upgraded Munich Linear Heavy Ion Post Accelerator. In: Proc. 1987 Particle Accelerator Conference, 1987, S. 367–368
[39] A MENDOLA, G. et al.: A Heavy Ion Linac for the CERN Accerlerator Complex.
In: Proc. 1992 European Particle Accerlerator Conference, Berlin, 1992, S. 536–538
[40] K ESTER, O. et al.: The REX-ISOLDE Linac. In: Proc. 1998 European Particle
Accelerator Conference, Stockholm, Schweden, 1998, S. 728–730
[41] R ATZINGER, U.: The New High Current Ion Accelerator at GSI and New Perspectives for Linac Design based on H-Mode Cavities. In: Proc. 2000 European
Particle Accelerator Conference, Vienna, Austria, 2000, S. 98–102
[42] R ATZINGER, U.: High Current IH-Structures. In: Proc. 1996 European Particle
Accelerator Conference, 1996, S. 264–266
[43] L U, Y.R. et al.: The Compact 20 MV IH-DTL for the Heidelberg Therapy Facility. In: Proc. 2004 Linear Accelerator Conference, Lübeck, Germany, 2004, S. 57–59
91
Literaturverzeichnis
[44] M EIER, M.: Commisioning of the Linac for the Heidelberg Heavy Ion Cancer
Therapy Centre (HIT). In: Proc. 2007 Particle Accelerator Conference, Knoxville,
Tennessee, USA, 2007, S. 2734–2736
[45] L IEBERMANN, H.: Entwicklung einer supraleitenden CH-Beschleuniger-Struktur
für leichte und schwere Ionen, Goethe Universität Frankfurt, Doktorarbeit, 2008
[46] B ALLEYGUIER, P.: External Q Studies For APT SC Cavity Couplers. In: Proc.
1998 Linear Accelerator Conference, Argonne, IL, USA, 1998, S. 133–135
[47] M AIER, L.C. ; S LATER, J.C.: J. Appl. Phys 23 (No. 1). 1952. – p. 68-83
92