Der Schrittmotor
Werbung

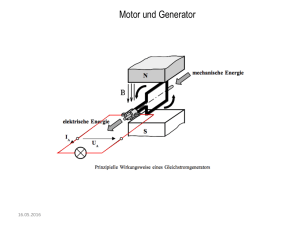
Elektrische Antriebe und Anlagen Kapitel 9: Der Schrittmotor 5.Jhrg KOHE KOHE 1 Schrittmotor Eigenschaften: • speziell für Stellaufgaben konstruierte elektrische Maschine kleiner Leistung, die definierte Schritte (Schrittwinkel α=0.36...180°) ausführt • werden zur schnellen und exakten Positionierung eingesetzt • werden mit Wechselrichter gespeist (sprungf. umlaufendes Magnetfeld) Vorteile: • kostengünstig für kleine Vorschubgeschwindigkeiten • hohe Positioniergenauigkeit • Steuerung (keine Regelung Î kein Positions-Messsystem notwendig) Nachteile: • begrenzter Drehzahlsprung (Start-Stop-Frequenz) • kleine Leistung • kein schneller Eilgang KOHE 2 Schrittmotor - Aufbau Aufbau: - grundsätzlich Aufbau wie Synchronmotor (Außertrittfallen bei zu großer Last) - Arbeitsweise nach dem Reluktanzprinzip oder mit permanenter Erregung Ständeraufbau: 1. mit ausgeprägten Zähnen und jeweils eigener Wicklung pro Zahn (mindestens drei Wicklungen für eine eindeutige Drehrichtung) 2. Klauenpoltyp (Ringspule im Umfang und abwechselnd Zähne mit elektrisch erregten N- & S-Polen) KOHE 3 Läuferaufbau - drei Grundtypen Reluktanztyp (VR-Schrittmotor): • unerregter Läufer, nur magnetische Vorzugsrichtung (Zähne und Nuten) • Die Zähnezahl im Läufer ist ungleich der Zähnezahl im Ständer • VT: einfacher Aufbau, kostengünstig • NT: geringes Drehmoment, kein Rastmoment, geringer Wirkungsgrad Permanentmagnettyp: • zylindrischer, permanenterregter Läufer mit radialer Magnetisierung • VT: große Haltemomente • NT: große Schrittwinkel (nur begrenzte Anzahl von Polen nebeneinander möglich) KOHE 4 Läuferaufbau - drei Grundtypen Hybridtyp (Hybridschrittmotor): • axial magnetisierter Läufer, der von zwei gezahnten Polkappen umschlossen ist • beide Polkappen sind um eine halbe Polteilung verdreht, so dass sich immer ungleichnamige Pole anziehen • VT: vereint die VT von Reluktanz- & PermanentmagnetSchrittmotoren KOHE 5 Läuferaufbau - drei Grundtypen Hybridtyp (Hybridschrittmotor): KOHE 6 Steuerverfahren Ansteuerung der Ständerwicklungen: • mit Spannungsblöcken (unipolar oder bipolar), eventuell mit Vorwiderständen zur Verringerung der el. Zeitkonstante • mit Stoßerregung, um den Stromanstieg zu beschleunigen • mit erhöhter Spannung und Strom-Regelung Î höchstes Drehmoment (schnellsten Stromanstieg) • niedrigere Startfrequenz fA0max, Start-Stopp-Betrieb möglich • Betriebsfrequenz fB0max für kontinuierlichen Betrieb • meist gesteuerter Betrieb, jeder Puls wird in einen Winkelschritt umgesetzt! KOHE 7 Unipolar Ansteuertechniken: Unipolar- & Bipolarbetrieb Unipolare Erregung: • einfache Ansteuerung • am Mittelabgriff der Spule liegt die Versorgungsspannung fest an, es wird abwechselnd immer ein Spulenende nach Masse geschaltet (oder umgek.) • geringer Schaltungsaufwand • in älteren Ausführungen bevorzugt KOHE 8 Bipolar Ansteuertechniken: Unipolar- & Bipolarbetrieb Bipolare Erregung: • Spulen werden mit einer H-Brücke für jede Motorwicklung mit bipolaren Transistoren und Freilaufdioden umgepolt • relativ hoher Schaltungsaufwand • in modernen Ausführungen bevorzugt KOHE 9 Vollschrittbetrieb Vollschrittbetrieb (Normalbetrieb – Bsp. unipolar): • es werden immer zwei nebeneinander liegende Spulenpaare gleichzeitig bestromt. Es ergeben sich vier unterschiedliche Schrittpositionen pro Polpaar 1 2 Phasen Schritt A B C D 3 KOHE 4 1 + 0 0 + 2 + 0 + 0 3 0 + + 0 4 0 + 0 + 5 + 0 0 + 10 Vollschrittbetrieb Vollschrittbetrieb (Wavedrivebetrieb – Bsp. unipolar): • es wird immer nur ein Spulenpaar bestromt. Die Leistungsaufnahme und damit auch das Drehmoment sind im Vergleich zum Normalbetrieb geringer. • die resultierenden vier Schrittpositionen liegen zwischen denen des Normalbetriebes. KOHE 11 Vollschrittbetrieb Schrittwinkel im Vollschrittbetrieb: Schrittzahl (p..Polpaarzahl, m..Ständersysteme): Schrittwinkel: Bsp.9.1: Die Abbildung zeigt den prinzipiellen Aufbau eines hybriden Schrittmotors. Der graue Rahmen stellt einen Teil des Blechpaketes dar. Die grünen Wicklungen stehen symbolisch für die Ständerwicklungen zu den Polen. In der Mitte befindet sich der gelbe Permanentmagnet mit den weichmagnetischen gezahnten Rotorscheiben in Rot und Blau. Wie groß ist der Schrittwinkel? KOHE 12 Halbschrittbetrieb Halbschrittbetrieb: • Kombination aus Normal- und Wavedrive-Betrieb. Es wird wechselweise eine bzw. zwei Spulen bestromt. • Î 8 Schrittpositionen / der physikalische Schrittwinkel wird halbiert Mikroschrittbetrieb: • die in beiden Ständerwicklungen fließenden Ströme werden gegenseitig abgestuft Î Sinus KOHE 13 Voll- & Halbschrittbetrieb Halb- & Vollschrittbetrieb nochmals im Vergleich: KOHE 14 Treiber-Bausteine direkte Ansteuerung (div. H-Brücken): • L293D (0.6 bzw. 1A) • L6205N (2.8A) Anst. mittels Treiber-Bausteine (L297 & L298): Ansteuerung für Mikrostepping-Betrieb: • Microstepping-Chipsatz von Ericsson (BPM3960 & PBL3771) KOHE 15 Quellenverzeichnis • Elektronische Messdatenverarbeitung, Klaus Betzler, Universität Osnabrück • Rummich, Erich; Ebert, Hermann; Gförer, Ralf; Traeger, Friedrich: Elektrische Schrittmotoren und –antriebe Kontakt & Studium, Band 365, Technische Akademie Esslingen, 3. Auflage, expert verlag, D-71272 Renningen, 1992 • Wolfgang Back, Der Schrittmotor • http://www.roboternetz.de/wissen/index.php/Schrittmotoren KOHE 16