Mathematik für Informatik
Werbung

Mathematik für Informatik
Dieses Skript basiert weitgehend auf den Ausarbeitungen von Prof. Dr. Martin Henk und seiner Arbeitsgruppe. Die Stoauswahl ist durch das Modulhandbuch der FIN vorgeschrieben.
Magdeburg, Wintersemester 2008/2009, Prof. Dr. Alexander Pott
1
1 Schulsto
Bemerkung 1.1.
i)
x≤y
ii)
x ≤ y,
iii)
x≤y
iv)
x ≤ y,
v)
und
y ≤ z,
dann
und
Notation 1.2
der Betrag von
ii)
iii)
|x| ≥ 0
dann
gilt:
x ≤ z.
x · z ≤ y · z.
−x ≥ −y .
1
dann x
≥
.
(Betrag)
1
y
> 0.
x heiÿt
(
x,
|x| =
−x,
Für eine reelle Zahl
falls
falls
x ≥ 0,
x < 0.
x.
Bemerkung 1.3.
i)
dann
x, y, z
x ± z ≤ y ± z.
z ≥ 0,
dann
0 < x ≤ y,
Für reelle Zahlen
Für reelle Zahlen
mit Gleichheit nur für
x, y
gilt:
x = 0.
|x · y| = |x| · |y|.
|x + y| ≤ |x| + |y|
(Dreiecksungleichung).
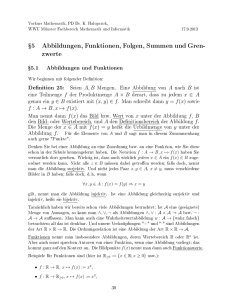
sin(α)
α
cos(α)
Radius 1
Abbildung 1: Sinus, Cosinus am Einheitskreis
Bemerkung 1.4.
i)
ii)
sin(α + 2π) = sin α, cos(α + 2π) = cos α,
sin(−α) = − sin α, cos(−α) = cos α,
1
iii)
sin2 α + cos2 α = 1,
iv)
sin(α + β) = sin α cos β + cos α sin β
(Phytagoras)
und
cos(α + β) = cos α cos β − sin α sin β .
1 Pythagoras von Samos, 582507
2
(Additionstheoreme)
Notation 1.5.
Zur Abkürzung längerer Summen oder Produkte schreibt man
n
X
i=1
n
Y
ai = a1 + a2 + . . . + an ,
ai = a1 · a2 · . . . · an .
i=1
Manchmal schreibt man auch
X
ai
Y
und
i∈I
sofern
I
ai ,
i∈I
eine endliche Menge von natürlichen Zahlen ist. Machen Sie sich bitte klar, dass solche Ausdrücke
nur für Summen und Produkte von endlich vielen Zahlen sinnvoll sind!
Bemerkung 1.6.
ai j
Seien
Zahlen für
1 ≤ i ≤ n , 1 ≤ j ≤ m.
n X
m
X
ai j =
i=1 j=1
Notation 1.7.
i)
Sei
a
eine reelle Zahl, und
a0 = 1,
iii)
a−n =
1
an ,
eine nicht-negative ganze Zahl.
Notation 1.8.
a 6= 0.
Sei
a
ungerade und
Notation 1.9.
n eine positive ganze Zahl. Dann gibt es genau√eine
√
n
xn = a
; x wird mit
a
bezeichnet. Für n = 2 schreibt man auch nur
a.
√
√
n
auch
a = − n −a deniert.
eine nicht-negative reelle Zahl und
nicht-negative reelle Zahl
n
a<0
x
mit
so ist
Für eine nicht-negative reelle Zahl
√a und positive ganze Zahlen
m
√ m
am = n a ,
1
= m , a 6= 0.
an
an =
m
a− n
Bemerkung 1.10.
i)
ii)
iii)
iv)
v)
ai j .
j=1 i=1
an = a · a · . . . · a (n-mal),
ii)
Ist
n
m X
n
X
Dann ist
Für reelle Zahlen
x, y
m, n
deniert man
n
und rationale Zahlen
p, q
gilt
xp · xq = xp+q ,
xp
xq
= xp−q , x 6= 0,
xp · y p = (x · y)p ,
p
xp
x
=
, y 6= 0,
p
y
y
(xp )q = xp·q .
Diese Regeln gelten auch für beliebige reelle Exponenten
Notation 1.11
(Logarithmus)
heiÿt Logarithmus von
a
.
Seien
zur Basis
b
a, b
positive reelle Zahlen,
und wird
Ist die Basis gegeben durch die Eulersche
p, q .
logb a bezeichnet.
e = 2, 71828182...,
2 Zahl
ln a = loge a
natürlicher Logarithmus.
2 Leonhard Euler, 1707 1783
3
b 6= 1.
Die eindeutige Zahl
dann heiÿt
x
mit
bx = a
Bemerkung 1.12.
i)
ii)
blogb a = a, logb b = 1, logb 1 = 0,
logb (a · c) = logb a + logb c, logb
logc a =
iv)
logb (an ) = n · logb a,
vi)
= logb a − logb c.
logb a
logb c ,
iii)
v)
a
c
logb a · loga b = 1,
alogb c = clogb a .
2 Aussagen und Mengen
2.1
Aussagen
Vereinbarung 2.1 (Aussagen3 ).
es sei wahr
(w)
oder falsch
(f ).
Eine Aussage ist ein sprachliches Gebilde, von dem es sinnvoll ist zu sagen,
Eine Aussage also ist ein Satz, der entweder wahr oder falsch ist, aber nie
beides zugleich.
w
und
f
A.
heiÿen Wahrheitswerte der Aussage
•
12 ist durch 6 teilbar ist eine wahre Aussage.
•
Jede gerade Zahl
≥ 4
ist Summer zweier Primzahlen
ist eine Aussage. Wahrheitswert unbekannt
4
(Goldbachsche Vermutung ).
•
Aus gegebenen Aussagen gewinnt man durch Verknüpfungen (Junktionen) neue Aussagen, sogenannte
Aussageformen.
Denition 2.2
.
(Negation, Konjunktion, Disjunktion)
Aussageform
Negation von
A
A und B
A und B
Konjunktion von
Disjunktion von
•
A
und
B
Aussagen.
Symbol
Sprechweise
A
A∧B
A∨B
nicht
A
A
A
B
oder B .
und
Die Wahrheitswerte einer Aussageform werden in Wahrheitstafeln angegeben:
A
w
f
•
Seien
A
f
w
A
w
w
f
f
A∧B
w
f
f
f
B
w
f
w
f
A
w
w
f
f
B
w
f
w
f
A∨B
w
w
w
f
Weitere Aussageverbindungen, die insbesondere in der Mathematik verwendet werden, sind Implikationen.
3 Aristoteles, 384 322
4 Christian Goldbach, 1690 1764
4
Denition 2.3
(Implikation)
.
Seien
A⇒B
Implikation genannt und mit
A
B
und
A
w
w
f
f
Weitere Sprechweisen: aus
für
A
folgt
Aussagen. Die Aussage wenn
A
gilt, dann gilt
B
wird
bezeichnet. Ihre Wahrheitswerte sind gegeben durch
B , A
A⇒B
w
.
f
w
w
B
w
f
w
f
impliziert
B , A
ist hinreichend für
B ,
oder B ist notwendig
A .
Achtung: Bei einer Aussageform A ⇒ B muss kein kausaler Zusammenhang zwischen A und B
bestehen.
Z.B. ist die Aussage: Wenn in Magdeburg keine Frau wohnt, dann steigen morgen die Aktienkurse eine
(sogar wahre) Aussage. Die Aussage Wenn in Magdeburg eine Frau wohnt, dann ist der Papst eine Frau
ist ebenfalls eine (in diesem Falle falsche) Aussage.
Denition 2.4
.
(Äquivalenz)
Seien
A
und
B
Aussagen. Die Aussageform
(A ⇒ B) ∧ (B ⇒ A)
heiÿt Äquivalenz und wird mit
A⇔B
bezeichnet.
Sprechweisen: A ist gleichwertig mit
wenn
B
gilt , A ist äquivalent zu
B , A gilt genau dann, wenn B gilt , A gilt
B oder A ist notwendig und hinreichend für B .
•
A
w
w
f
f
Denition 2.5.
B
w
f
w
f
dann und nur dann,
A⇔B
w
f
f
w
Eine Aussageform, die aus mehreren Aussagen
A, B, C, . . .
zusammengesetzt ist, heiÿt eine
Tautologie, wenn sie stets wahr ist, unabhängig von den Wahrheitswerten der Aussagen
Satz 2.6.
A, B, C, . . ..
Die folgenden Aussagen sind Tautologien:
i)
iii)
(A ∧ B) ⇔ (A ∨ B),
ii)
(A ⇒ B) ⇔ (B ⇒ A) ⇔ A ∧ B,
Bemerkung 2.7.
Für Aussagen
A, B
i)
ii)
und
C
iv)
(A ∨ B) ⇔ (A ∧ B),
(A ⇔ B) ⇔ (A ⇔ B).
gilt:
((A ⇒ B) ∧ (B ⇒ C)) ⇒ (A ⇒ C),
((A ⇔ B) ∧ (B ⇔ C)) ⇒ (A ⇔ C).
In der Mathematik möchte man Aussagen beweisen, also zeigen, dass sie wahr sind. Angenommen, wir wollen
eine Aussage
B
beweisen. Dazu zeigen wir zunächst die Gültigkeit einer Implikation A
zunächst einmal unabhängig davon, ob
so wissen wir auch, dass
Zusammenhang zwischen
Wichtig: Sie können
B
A
B wahr ist, also ist B
A und B bestehen.
dann bewiesen. In diesem Fall muss natürlich ein kausaler
nicht dadurch beweisen, dass Sie die Gültigkeit B
Aussage ist. Denn: Die Aussageform
A
ist auch wahr, wenn
B
⇒ B , und zwar
A wahr ist,
wahr ist. Wenn wir dann auch noch wissen, dass
(B ⇒ A)
und
falsch ist.
Die gebräuchlichsten Beweismethoden in der Mathematik sind:
5
⇒ Abeweisen, wobei A eine wahre
A ⇒ B:
1. Direkter Beweis einer Implikation
B
(Konklusion)
Aus der Voraussetzung (Prämisse)
abgeleitet, indem gezeigt wird, dass die Implikation
2. Indirekter Beweis oder Widerspruchsbeweis einer Implikation
kann man auch die Implikation
B⇒A
A⇒B
A ⇒ B:
A
wird die Behauptung
wahr ist.
Anstatt der Implikation
nachweisen, oder zeigen, dass die Konjunktion
A∧B
A⇒B
falsch ist,
d.h. zu einem Widerspruch führt (vgl. Bemerkung 2.6 iii)).
3. Beweis einer Äquivalenz
2.2
A ⇔ B:
Man beweist die Aussageformen
A⇒B
und
B ⇒ A.
Mengen
Vereinbarung 2.8 (Mengen5 ).
Eine Menge ist eine Zusammenfassung von verschiedenen Objekten zu einer
Gesamtheit. Die Objekte in einer Menge heiÿen Elemente der Menge. Weiterhin fordern wir, dass für jedes
nur vorstellbare Objekt eindeutig entschieden werden kann, ob es ein Element der Menge ist oder nicht.
Notation 2.9.
mit
x∈
/ M,
d.h.
Notation 2.10
•
Die Aussage x ist ein Element der Menge
x
ist kein Element der Menge
(Beschreibung von Mengen)
wird mit
bezeichnet, die Negation
Aufzählung der Elemente, z.B.,
• N = {1, 2, 3, 4, 5, . . . }
M = {◦, , ?}.
ist die Menge der natürlichen Zahlen.
• Z = {. . . , −3, −2, −1, 0, 1, 2, 3, . . . }
ist die Menge der ganzen Zahlen.
Beschreibung von Eigenschaften, z.B.,
M = {n ∈ N : n ist Vielfaches
= {2 n : n ∈ N}.
• Q = { pq : p ∈ Z, q ∈ N}
• R
von 2}
ist die Menge der rationalen Zahlen.
bezeichnet die Menge der reellen Zahlen.
• ∅ = {}
•
x∈M
.
M = {1, 2, 3, 4, 5},
•
M
M.
bezeichnet die leere Menge.
6
Russellsche Antinomie . Sei
M
die Menge aller Mengen, die sich nicht selbst enthalten, d.h.,
M = {X : X ∈
/ X}.
Ist
M ∈ M?
Ist
M ∈ M,
dann muss
Ist
M∈
/ M,
dann gilt nach Denition von
M
die Bedingung
Im Sinne unserer Vereinbarung ist
Denition 2.11
A(x)
M
M∈
/M
erfüllen!
M
M ∈ M!
aber
keine Menge!
.
(Allquantor und Existenzquantor)
Sei
M
eine nichtleere Menge und für jedes
x∈M
eine Aussage.
i) Die Aussage für alle
x∈M
gilt
A(x)
wird mit
5 Georg Cantor, 18451918
6 Bertrand Russell, 18721970
6
∀x ∈ M : A(x)
bezeichnet;
∀
heiÿt Allquantor.
sei
ii) Die Aussage es gibt ein
x ∈ M,
A(x)
für das
gilt
wird mit
∃x ∈ M : A(x)
bezeichnet;
∃
heiÿt
Existenzquantor.
Bemerkung 2.12.
Seien
A(x), x ∈ M ,
Aussagen. Es gilt:
∀x : A(x) ⇔ ∃ x : A(x)
Erklärung 2.13
seien
.
(Vollständige Induktion)
A(n), n ∈ M ,
∃ x : A(x) ⇔ ∀x : A(x).
und
Sei
M = {k, k + 1, k + 2, . . . }, wobei k eine ganze Zahl ist, und
∀n ∈ M : A(n) verwendet man häug das Prinzip
Aussagen. Zum Beweis der Aussage
der vollständigen Induktion:
i) Induktionsanfang: Man zeigt, dass die Aussage für
n=k
In Worten: Wir zeigen zunächst, dass für die kleinste Zahl in
Satz 2.14
n,
dass aus
A(n)
die Aussage
.
(Geometrische Reihe)
Sei
A(n + 1)
und sei
n∈N
sei
A(n)
die Aussage gilt, d.h.,
A(k).
Dann beweisen
n ∈ N.
Dann gilt
1 − xn+1
.
1−x
xi =
i=0
Beweis. Für
M
folgt.
x ∈ R, x 6= 1,
n
X
A(k).
A(n) ⇒ A(n + 1).
ii) Induktionsschritt: Man zeigt die Implikation
wir für jedes
gilt, also
(2.1)
die Aussage (2.1).
i) (Induktionsanfang) Wir zeigen, dass
1
X
A(1)
wahr ist, denn
xi = x0 + x1 = 1 + x = (1 + x)
i=0
ii) (Induktionsschritt) Wir folgern
n+1
X
A(n + 1)
i
x =
i=0
n
X
aus
A(n):
!
i
+ xn+1 =
x
A(n)
i=0
n+1
=
1−x
1 − x2
1−x
=
.
1−x
1−x
1 − xn+1
+ xn+1
1−x
1 − xn+2
+x
(1 − x)
=
.
1−x
1−x
n+1
n ∈ N sei A(n) die Aussage, dass in jeder Gruppe von n Studenten, in der einer Mathematik
Beispiel 2.15. Für
studiert, alle Mathematik studieren.
•
Induktionsanfang:
•
Induktionsschritt: Sei
A(1)
ist sicherlich wahr.
M
ein Mathematikstudent.
s1 , . . . , sn
Also gilt
und
A(n)?
eine Gruppe von
A(n)
s2 , . . . , sn+1
n+1
s1 , . . . , sn+1 bezeichnen. Sei s2
und {s2 , . . . , sn+1 } zeigt, dass
gilt A(n + 1).
Studenten, die wir mit
angewendet auf die Gruppe
{s1 , . . . , sn }
Mathematik studieren; also alle und somit
Das ist natürlich falsch. Der Fehler steckt darin, dass die Aussage
unbedingt gilt, denn es kann
s2 ∈
/ {s1 , . . . sn }
Denition 2.16
.
i) Eine Menge
für
n=1
gelten, wenn nämlich
A(1) ⇒ A(2)
nicht
s2 6= s1 .
(Teilmenge)
B heiÿt Teilmenge
A ist, d.h.,
einer Menge
A
(Schreibweise:
B ⊆ A),
Element von
B ⊆ A ⇔ ∀b ∈ B : b ∈ A.
7
wenn jedes Element von
B
auch
ii) Zwei Mengen
A
und
B
heiÿen gleich (Schreibweise:
nicht gleich, so schreibt man
iii) Eine Menge
B
Bemerkung 2.17.
Denition 2.18
B = A),
falls
B⊆A
und
A ⊆ B.
Sind
A
und
B
A 6= B .
A
heiÿt echte Teilmenge einer Menge
(Schreibweise:
B ⊂ A),
wenn
B⊆A
und
B 6= A.
Die leere Menge ist Teilmenge einer jeden Menge.
.
(Durchschnitt, Vereinigung, Dierenz)
A, B
Seien
Mengen.
i)
A ∩ B = {x : x ∈ A ∧ x ∈ B}
heiÿt Durchschnitt von
A
und
B.
Ist
A ∩ B = ∅,
so heiÿen
A
und
B
disjunkt.
ii)
A ∪ B = {x : x ∈ A ∨ x ∈ B}
A
heiÿt Vereinigung von
und
B.
iii)
A \ B = {x : x ∈ A ∧ x ∈
/ B}
heiÿt Dierenz von
iv) Ist
A
und
B ⊆ U , so heiÿt die
B bezeichnet.
B.
Dierenz
U \B
auch Komplementärmenge von
B
in der Grundmenge
U
und
wird mit
Notation 2.19.
Wie im Fall von Summen und Produkten kann man auch hier die Vereinigung mehrerer
Mengen einfacher schreiben:
n
[
i=1
n
\
Ai = A1 ∪ . . . ∪ An ,
Ai = A1 ∩ . . . ∩ An .
i=1
Im Gegensatz zu Summen und Produkten ist es hier aber sehr wohl sinnvoll, auch die Vereinigung und den
Schnitt von unendlich vielen Mengen zu betrachten.
Denition 2.20.
Sei
I
eine beliebige Menge. Zu jedem
[
Ai := {x :
i∈I
es gibt ein
gebe es eine Menge
i∈I
mit
Ai .
Wir denieren
x ∈ Ai }
i∈I
sowie
\
Ai := {x :
für alle
i∈I
gilt
x ∈ Ai }.
i∈I
Satz 2.21
(Verknüpfungsregeln für Mengen)
.
Seien
A, B
Teilmengen einer Grundmenge
U,
i) Kommutativität:
A ∩ B = B ∩ A,
A ∪ B = B ∪ A.
ii) Assoziativität:
(A ∩ B) ∩ C = A ∩ (B ∩ C),
(A ∪ B) ∪ C = A ∪ (B ∪ C).
iii) Distributivität:
A ∩ (B ∪ C) = (A ∩ B) ∪ (A ∩ C),
8
A ∪ (B ∩ C) = (A ∪ B) ∩ (A ∪ C).
also
A, B ⊆ U .
iv) Idempotenz:
A ∩ A = A,
A ∪ A = A.
v) Absorption:
(A ∪ B) ∩ A = A,
∅
vi) Neutralität von
und
(A ∩ B) ∪ A = A.
U:
A ∩ ∅ = ∅,
A ∪ ∅ = A,
A ∪ U = U,
A ∩ U = A.
vii) Komplementregeln:
A ∩ A = ∅,
A ∪ A = U,
A = A.
7
viii) De Morgan'sche Regeln :
A ∪ B = A ∩ B,
Denition 2.22
8
.
(Boolesche Algebra )
A ∩ B = A ∪ B.
Eine Menge, in der drei Operationen, z.B.
(∩, ∪, −)
oder
(∧, ∨, −),
deniert sind, die den Eigenschaften i)-vii) aus Satz 2.21 genügen, wird als Boolesche Algebra bezeichnet.
Denition 2.23
9
.
(Kartesisches Produkt )
i) Das kartesische Produkt
X ×Y
(Sprechweise:
X
Y)
kreuz
zweier Mengen
X, Y
ist deniert als
X × Y = {(x, y) : x ∈ X, y ∈ Y }.
(x, y) ∈ X × Y
heiÿt geordnetes Paar.
ii) Allgemein ist das kartesische Produkt
X1 × X2 × · · · × Xn
von
n-Mengen X1 , . . . , Xn
deniert als
X1 × X2 × · · · × Xn = {(x1 , x2 , . . . , xn ) : xi ∈ Xi , 1 ≤ i ≤ n}.
(x1 , x2 , . . . , xn ) ∈ X1 × X2 × · · · × Xn
Für das kartesische Produk
Bemerkung 2.24.
Für
X × X × · · · × X (n-mal)
(x01 , . . . , x0n )
.
(Mächtigkeit endlicher Mengen)
mente enthält. Die Anzahl der Elemente von
Bemerkung 2.26.
i)
ii)
n-Tupel.
schreibt man auch
(x1 , . . . , xn ), (x01 , . . . , x0n ) ∈ X1 × · · · × Xn
(x1 , . . . , xn ) =
Denition 2.25
heiÿt geordnetes
Seien
A, B
A
⇔ xi =
Eine Menge
gilt
x0i ,
A
X n.
1 ≤ i ≤ n.
heiÿt endlich, wenn sie endlich viele Ele-
heiÿt Mächtigkeit von
A
und wird mit
|A|
bezeichnet.
endliche Mengen. Dann gilt
|A ∪ B| = |A| + |B| − |A ∩ B|,
|A × B| = |A| · |B|.
Man kann diese Bemerkung verallgemeinern:
Satz 2.27
.
(Inklusion-Exklusion)
A1 , . . . An endliche Mengen. Dann
n
[
\ X
Ai =
(−1)|I|+1 · Ai .
Seien
i=1
Denition 2.28
.
(Potenzmenge)
heiÿt Potenzmenge von
Lemma 2.29.
Sei
A
Sei
I⊆{1,...,n}
A
Menge. Die Menge
A.
eine endliche Menge. Dann gilt
|P (A)| = 2|A| .
7 Augustus De Morgan, 18061871
8 George Boole, 18151864
9 René Descartes, 15961650
9
gilt
i∈I
P (A) = {X : X ⊆ A}
aller Teilmengen von
A
10
3 Relationen und Abbildungen
Denition 3.1
(Relationen)
i) Eine binäre Relation
R
.
A1
zwischen den beiden Mengen
A2
und
ist eine Teilmenge von
A1 × A2 ,
also
R ⊆ A1 × A2 .
(x, y) ∈ R
Für
Im Falle
ii) Eine
sagt man,
A1 = A2 = A
n-stellige
x
y
und
R
heiÿt
stehen in Relation
Relation auf
Relation auf den
und schreibt dafür auch
xRy .
A.
n-Mengen A1 , . . . , An
x ∈ A1
iii) Wenn es zu jedem Element
R
genau ein Element
ist eine Teilmenge von
y ∈ A2
gibt mit
A1 × A2 × · · · × An .
(x, y) ∈ R, so heiÿt die Relation
eine Abbildung, siehe auch Denition 3.14.
Denition 3.2 (Verkettung (Komposition) von Relationen).
Sei R eine Relation zwischen den beiden MenA1 , A2 , und sei S eine Relation zwischen den Mengen A2 und A3 . Unter der Verkettung (Komposition)
S ◦ R von S nach R versteht man die Relation zwischen A1 und A3 gegeben durch
gen
S ◦ R = {(x, z) ∈ A1 × A3 : ∃ y ∈ A2
Denition 3.3
.
(Inverse Relation)
Sei
R ⊆ A1 × A2
mit
(x, y) ∈ R
und
(y, z) ∈ S}
eine binäre Relation. Dann heiÿt
R−1 = {(y, x) ∈ A2 × A1 : (x, y) ∈ R}
die zu
R
inverse Relation.
Bemerkung 3.4.
Seien
A1 , A 2 , A 3
Mengen und
R = (R−1 )−1
Denition 3.5
(Mengenfamilie)
.
i) Sei
R ⊆ A1 × A2 , S ⊆ A2 × A3 .
und
I
Dann gilt
(S ◦ R)−1 = R−1 ◦ S −1 .
f,
(Mi )i∈I .
eine Menge. Eine Abbildung
zuordnet, heiÿt Mengenfamilie mit Indexmenge
I.
Bezeichnung:
die jedem
i ∈ I
eine Menge
ii) Eine Menge von Mengenheiÿt ein Mengensystem.
Denition 3.6
R
i) Sei
ii)
.
(Äquivalenzrelation)
A.
eine Relation auf der Menge
x∈A
a)
R
heiÿt reexiv, falls für alle
b)
R
heiÿt symmetrisch, falls für alle
c)
R
heiÿt transitiv, falls für alle
Eine binäre Relation
A.
R
auf
A,
In diesem Fall sagt man für
Denition 3.7
.
(Äquivalenzklasse)
gilt:
(x, x) ∈ R,
(x, y) ∈ R
gilt:
(x, y), (y, z) ∈ R
(y, x) ∈ R,
gilt:
(x, z) ∈ R.
die reexiv, symmetrisch und transitiv ist, heiÿt Äquivalenzrelation auf
(x, y) ∈ R
Sei
R
auch x ist äquivalent zu
eine Äquivalenzrelation auf A. Für
[x]R = {y ∈ A : (x, y) ∈ R}
die Äquivalenzklasse von
Satz 3.8.
i)
A=
ii) Für
Sei
S
R
x
bzgl.
R.
eine Äquivalenzrelation auf A. Dann gilt:
x∈A [x]R ,
x, y ∈ A
gilt entweder
y .
[x]R = [y]R
oder
[x]R ∩ [y]R = ∅.
11
x∈A
heiÿt
In Worten:
A
ist die Vereinigung seiner Äquivalenzklassen, und zwei verschiedene Äquivalenzklassen sind
disjunkt.
Satz 3.9.
SA
Sei
Ai 6= ∅, A =
i∈I
(Ai )i∈I eine Mengenfamilie mit Ai ⊆ A für alle i ∈ I .
i 6= j gilt, dann ist die Relation R ⊆ A × A gegeben durch
eine nicht-leere Menge. Sei
Ai
und
Ai ∩ Aj = ∅
für
R = {(x, y) : x
eine Äquivalenzrelation auf
Bemerkung 3.10.
•
A
y
und
liegen in der derselben Teilmenge
heiÿt eine Partition von
(Ai )i∈I
Ai }
Ai .
mit den Äquivalenzklassen
Eine Mengenfamilie
mit
Ai 6= ∅, A =
S
i∈I
Ai
und
Lax gespochen: Partitionen und Äquivalenzrelationen sind dieselben Objekte!
•
Wenn
∼
•
eine Äquivalenzrelation auf
A/ ∼⊆ P (A)
A
m∈N
Rm
und sei
n
Elementen heiÿt die
die Relation auf
Rm = {(x, y) ∈ Z × Z : x − y
Dann ist
Rm
eine Äquivalenzrelation, und
Äquivalenzklassen
•
Für
Z ist
[0]Rm , [1]Rm , . . . , [m − 1]Rm .
k ∈ {0, . . . , m − 1}
[k]Rm
Daher nennt man
Denition 3.12
i)
ii)
R
besteht
[k]Rm
A,
auf
iii) Ein Ordnung(srelation)
ist durch
Z
n-te
Bell-Zahl
10
gegeben durch
teilbar}.
m
m
[k]m .
aus allen Zahlen, die bei Division durch
x, y ∈ A
bezeich-
A.
auch Restklasse, und man bezeichnet sie einfach mit
heiÿt antisymmetrisch, falls für alle
R
i 6= j
die disjunkte Vereinigung der paarweise verschiedenen
(Totale, partielle, Ordnung(srelation))
Eine Relation
für
A/ ∼
ist, so wird die Menge der Äquivalenzklassen mit
ist eine Teilmenge der Potenzmenge von
Die Anzahl der Partitionen einer Menge mit
Beispiel 3.11 (Restklassen). Sei
•
Ai ∩ Aj = ∅
A.
•
net. Beachte:
Wenn
.
mit
Sei
R
den Rest
eine Relation auf der Menge
(x, y) ∈ R
und
(y, x) ∈ R
gilt:
k
lassen.
A.
x = y.
die reexiv, antisymmetrisch und transitiv ist, heiÿt Ordnung(srelation) auf
R
auf
A
mit der Eigenschaft
totale Ordnung. Andernfalls heiÿt
R
(x, y) ∈ R
oder
(y, x) ∈ R
für alle
x, y ∈ A
A.
heiÿt
eine partielle Ordnung.
Beispiel 3.13.
• ≤
ist eine totale Ordnung auf
• ⊆
ist eine partielle Ordnung auf der Potenzmenge einer Menge.
Denition 3.14
Y
R.
.
(Abbildung(Funktion))
x∈X
ist eine Vorschrift, die jedem
Eine Abbildung (Funktion)
genau ein Element
f :X→Y
Man sagt: x wird auf
Die Menge
X
f (x)
mit
.
(Graph)
f
von einer Menge
X
Sei
f :X→Y
mit
Y
x 7→ f (x)
x 7→ f (x).
heiÿt Wertebereich der Abbildung
eine Abbildung. Die Relation
Γf = {(x, f (x)) : x ∈ X} ⊆ X × Y
heiÿt der Graph der Abbildung.
10 Eric Temple Bell, 18831960
12
in eine Menge
zuordnet. Man schreibt dafür:
abgebildet, bzw. f (x) ist das Bild oder der Funktionswert von
heiÿt Denitionsbereich und die Menge
Denition 3.15
f (x) ∈ Y
x.
f.
Denition 3.16
.
(Bildmenge, Urbildmenge)
f : X → Y
Sei
mit
x 7→ f (x)
eine Abbildung. Für
A ⊆ X
schreibt man auch einfach
f −1 (y).
heiÿt
f (A) := {f (x) : x ∈ A}
Bildmenge von
A,
und für
B⊆Y
heiÿt
f −1 (B) := {x ∈ X : f (x) ∈ B}
Urbildmenge von
B.
Denition 3.17
(Injektiv, surjektiv, bijektiv)
i)
f
Für einelementige Mengen
B,
.
also
Sei
B = {y}, y ∈ Y ,
f :X→Y
eine Abbildung.
heiÿt injektiv, wenn
∀x1 , x2 ∈ X : x1 6= x2 ⇒ f (x1 ) 6= f (x2 ),
d.h., verschiedene Elemente aus
ii)
f
X
werden auf verschiedene Elemente in
Y
abgebildet.
heiÿt surjektiv, wenn
f (X) = Y,
d.h., jedes Element aus
iii)
f
Y
ist das Bild eines Elementes aus
X.
heiÿt bijektiv, oder eins-zu-eins Abbildung bzw. eineindeutige Abbildung, wenn
f
injektiv und surjektiv
ist.
Beispiel 3.18.
•
Sei
f : R → R mit f (x) = x2 . f
•
Sei
f : R → R≥0
•
Sei
f : R≥0 → R≥0
Denition 3.19
mit
f (x) = x2 .
mit
Dann ist
f (x) = x2 .
f
f (1) = f (−1), noch surjektiv, da f (R) = R≥0 6= R.
surjektiv, aber immer noch nicht injektiv.
Dann ist
f
bijektiv.
.
0
f (X) ⊆ X . Die Verkettung (Komposition)
x 7→ (g ◦ f )(x) = g(f (x)).
•
g : X0 → Y 0
0
g nach f ist die Abbildung g ◦f : X → Y
(Verkettung (Komposition) von Abbildungen)
Abbildungen mit
mit
ist weder injektiv, da
von
Seien
f : X → Y
Die Verkettung von Abbildungen entspricht der Verkettung von Relationen:
Lemma 3.20.
Seien
f :X→Y
und
g:Y →Z
f
und
g
injektiv, dann auch
ii) Sind
f
und
g
surjektiv, dann auch
iii) Sind
f
und
g
bijektiv, dann auch
Seien
Γg◦f = Γg ◦ Γf .
Abbildungen.
g ◦ f : X → Z.
i) Sind
Lemma 3.21.
und
g ◦ f : X → Z.
g ◦ f : X → Z.
f :X →Y, g :Y0 →Z
und
h : Z0 → W
Abbildungen mit
f (X) ⊆ Y 0
und
g(Y 0 ) ⊆ Z 0 .
Dann gilt
(h ◦ g) ◦ f = h ◦ (g ◦ f ),
d.h. die Komposition von Abbildungen ist assoziativ.
Denition 3.22
.
(Identische Abbildung)
identische Abbildung auf
Denition 3.23
Sei
X
Menge. Die Abbildung
mit
x 7→ x
heiÿt
. Sei f : X → Y bijektiv. Die Abbildung g : Y → X , die jedem y ∈ Y
y = f (x) zuordnet, heiÿt inverse Abbildung, und man schreibt für g auch
(Inverse Abbildung)
das eindeutig bestimmte
idX : X → X
X.
x∈X
mit
f −1 .
13
•
Die inverse Abbildung entspricht der inversen Relation:
Lemma 3.24.
f :X→Y
Sei
bijektiv. Dann gilt:
i) f −1 ◦ f = idX ,
ii) f ◦ f
:Y →Z
◦ g −1 .
Sei g
−1
f
•
Γf −1 = Γ−1
f .
−1
= idY ,
d.h.
d.h.
(f −1 ◦ f )(x) = x,
(f ◦ f
−1
)(y) = y,
für alle
x ∈ X,
für alle
y ∈ Y.
eine weitere bijektive Abbildung. Für die Umkehrfunktion von
Man kann jede Abbildung
den Bildbereich
f (X)
f :X→Y
g◦f : X → Z
gilt:
(g ◦ f )−1 =
dadurch surjektiv machen, indem man den Wertebereich auf
einschränkt, also die Abbildung
fe : X → f (X),
x 7→ f (x)
ist surjektiv.
•
Kann man mit einem ähnlichen Trick eine nicht injektive Abbildung injektiv machen?
Lemma 3.25.
Ist
f :X→Y
eine Abbildung, dann denieren wir auf
x1 ∼ x2
Dann ist
∼
X
eine Relation
∼
wie folgt:
f (x1 ) = f (x2 )
genau dann wenn
eine Äquivalenzrelation und die Äquivalenzklassen sind die Urbilder
f −1 (y) (y ∈ f (X)).
Satz 3.26
(Abbildungssatz). Sei f : X → Y , und ∼ die in Lemma 3.25 denierte Relation. Ferner sei
f˜ : X → X/ ∼ deniert durch f˜(x) := [x]∼ . Dann gibt es genau eine Abbildung g : X/ ∼→ Y mit g ◦ f˜ = f ,
für die also g([x]∼ ) = f (x) gilt. Die Abbildung g ist injektiv. Sie ist surjektiv genau dann wenn f surjektiv
ist.
Denition 3.27 (Gleichmächtigkeit von Mengen).
Zwei Mengen
Kardinalität wenn es eine bijektive Abbildung von
schreibt dann auch
A
nach
B
A, B heiÿen gleichmächtig oder von gleicher
B nach A) gibt. Man
(und somit auch von
|A| = |B|.
f : A → B gibt, so sagt man auch, dass die Kardinalität von A echt
|A| > |B|. Wenn es eine injektive Abbildung f : A → B gibt, dann
von A kleiner gleich der von B ist, geschrieben |A| ≤ |B|.
Wenn es keine injektive Abbildung
grösser ist als die von
B,
geschrieben
sagt man, dass die Kardinalität
•
Beispiel 3.28.
Zwei endliche Mengen
• N
und
N0 = N ∪ {0}
• N
und
Z
•
ii) Ist
M
M
Satz 3.30.
R
R
und
{x ∈ R : 0 < x < 1}
.
(Abzählbarkeit, Überabzählbarkeit)
Sei
M
gleichmächtig sind.
eine unendliche Menge.
heiÿt abzählbar unendlich oder kurz abzählbar wenn es eine bijektive Abbildung von
d.h.
ii)
sind stets gleichmächtig.
sind gleichmächtig.
Man kann auch zeigen, dass
M
|A| = |B|
mit
sind gleichmächtig.
Denition 3.29
i)
A, B
ist von gleicher Mächtigkeit wie
nicht abzählbar unendlich, dann heiÿt
i)
Q
N nach M
N.
M
überabzählbar unendlich oder kurz überabzählbar.
ist abzählbar.
ist überabzählbar.
iii) Die Vereinigung von abzählbar vielen abzählbaren Mengen ist abzählbar.
14
gibt,
Die folgenden Sätze sind intuitiv recht einleuchtend, erfordern aber jeweils einen
Theorem 3.31.
Für jede Menge
A
Beweis.
gilt:
|P (A)| > |A|.
Theorem 3.32.
f :A→B
h : A → B.
Wenn es eine injektive Abbildung
dann gibt es auch eine bijektive Abbildung
Denition 3.33.
Sei
(Mi )i∈I
und eine injektive Abbildung
eine Mengenfamilie. Wir denieren
{f : I →
[
Mi
mit
f (i) ∈ Mi } =:
i∈I
Es ist die Aussage des Auswahlaxioms, dass die Menge
g:B→A
gibt,
i∈I Mi
i∈I Mi nicht leer ist, sofern alle
Mi 6= ∅.
4 Elementare Zahlentheorie, Grundlagen über Gruppen und komplexe Zahlen
4.1
Elementare Zahlentheorie, Grundlagen über Gruppen
Denition 4.1
.
(Permutationen)
n∈N
Für
sei
Sn = {σ : {1, . . . , n} → {1, . . . , n} : σ
die Menge aller bijektiven Abbildungen von
Denition 4.2
.
(Fakultät)
Für
n∈N
{1, . . . , n}
bijektiv
auf sich selbst.
}
σ ∈ Sn
heiÿt Permutation.
heiÿt
n! =
n
Y
i = 1 · 2 · 3 · . . . · (n − 1) · n
i=1
Fakultät (sprich:
Lemma 4.3.
n-Fakultät).
Für
Bemerkung 4.4
n∈N
Man vereinbart zudem
|Sn | = n!
ist
11 -Formel).
(Stirling
n! ≈
d.h. für groÿe
n
Bemerkung 4.5.
Satz 4.6
entspricht
n!
2π n
n n
e
,
g : N0 → N mit g(n) = n! lässt
(
1,
n = 0,
g(n) =
n · g(n − 1), n ≥ 1.
Die Fakultätsfunktion
12 ). Es sei
m ∈ M.
M
sich auch rekursiv denieren:
eine beliebige, nicht leere Menge. Weiter sei
Dann gibt es genau eine Abbildung
g(0) = m
Bemerkung 4.7.
√
etwa dem Ausdruck auf der rechten Seite.
(Rekursionssatz
Abbildung und
0! = 1.
und
g : N0 → M
ϕ : M → M
mit
g(n + 1) = ϕ(g(n)), n ∈ N0 .
Dieser Satz klingt trivial, benötigt aber einen (nicht trivialen) Induktionsbeweis.
11 James Stirling, 16921770
12 Richard Dedekind, 18311916
15
eine
Denition 4.8
Zudem vereinbart man
n
k
=0
falls
.
n ∈ N0 und k ∈ {0, . . . , n} heiÿt
n
n!
=
k!(n − k)!
k
k < 0 oder k > n. nk liest man n über k .
(Binomialkoezient)
Für
Satz 4.9.
i)
ii)
n
k
n
k
=
n−1
k
=
n
n−k .
Satz 4.10.
Sei
n−1
k−1
für
n ≥ 1.
k -elementigen Teilmengen einer n-elementigen
• 40 = 1, 41 = 4, 42 = 6, 43 = 2, 44 = 1.
Die Anzahl der
Beispiel 4.11.
•
+
M = {1, 2, 3, 4}.
0-elem.
1-elem.
2-elem.
3-elem.
4-elem.
Satz 4.12
∅
{1}, {2}, {3}, {4}
{1, 2}, {1, 3}, {1, 4}, {2, 3}, {2, 4}, {3, 4}
{2, 3, 4}, {1, 3, 4}, {1, 2, 4}, {1, 2, 3}
{1, 2, 3, 4}
Teilmengen:
Teilmengen:
Teilmengen:
Teilmengen:
Teilmengen:
.
(Binomischer Lehrsatz)
Für
n ∈ N0
x, y ∈ R
und
(x + y)n =
n X
n
k
k=0
Korollar 4.13.
n X
n
k=0
Notation 4.14.
gibt mit
n
k .
Menge beträgt
Für Zahlen
a, b ∈ Z
schreibt man
k
gilt:
xn−k y k .
= 2n .
a|b,
falls
a
ein Teiler von
b
ist, d.h. falls es ein
m∈Z
b = m · a.
Denition 4.15
.
(Primzahl)
Eine ganze Zahl
p|ab
Die Menge aller Primzahlen wird mit
P
p 6= 1
heiÿt Primzahl, wenn für alle
⇒
p|a
oder
a, b ∈ Z
p|b.
bezeichnet.
Diese Denition scheint etwas verschieden zu sein von der Schuldenition Eine Zahl
wenn ihre einzigen positiven Teiler
1
gilt:
und
p
p>1
ist eine Primzahl
selber sind. Man kann aber zeigen, dass beide Denitionen
gleichwertig sind. Das ist eine der Folgerungen aus dem Eukidischen Algorithmus (Division mit Rest).
Satz 4.16
13 ). Es gibt unendlich viele Primzahlen.
(Euklid
Bemerkung 4.17.
14 sagt aus, dass
Der Primzahlsatz
n
.
ln n
p p .
|{p ∈ P : p ≤ n}| ≈
Bemerkung 4.18.
Für
p∈P
und
k ∈ {1, . . . , p − 1}
ist
k
13 Euklid, ca. 300 v.Chr.
14 Jacques Hadamard, 1865 1963; Charles de la Vallée Poussin, 18661962
16
Denition 4.19 (ggT).
Für
a, b ∈ Z, a 6= 0,
heiÿt eine Zahl
m|a
ein gröÿte gemeinsame Teiler von
a
und
und
n∈N
⇒
m|b
mit
n|a
und
n|b
und der Eigenschaft
m|n
b.
Man kann zeigen, dass der ggT bis auf das Vorzeichen eindeutig bestimmt ist. Der positive ggT wird mit
ggT(a, b)
bezeichnet.
Lemma 4.20.
i)
ii)
Seien
a, b ∈ Z
und
m ∈ N.
ggT(a, b) = ggT(b, a) = ggT(−a, b) = ggT(a, −b) = ggT(−a, −b).
ggT(a, b) = ggT(a ± m · b, b) = ggT(a, b ± m · a).
Die Existenz eines ggT's ist gar nicht so oensichtlich. Benutzt wird die folgende fundamentale Eigenschaft
der ganzen Zahlen:
Lemma 4.21
(Division mit Rest)
.
Seien
a, b ∈ Z.
Dann gibt es eindeutige
q∈Z
und
r ∈ {0, . . . , |b| − 1}
mit
a = q · b + r.
r
heiÿt der Rest von
einfach a mod
•
b).
a
Insbesondere gilt
b
bei Division durch
Wir schreiben
a
div
b
und wird mit
bezeichnet (gesprochen a modulo
Seien
Euklidische Algorithmus, berechnet (rekursiv)
oder
a, b ∈ N und sei a ≥ b. Das folgende Verfahren, der sogenannte
ggT(a, b).
r = a mod b.
(1) Berechne
r = 0,
dann
ggT(a, b) = b
(3) Rufe das Verfahren auf für
Beispiel 4.23. Berechnen von
und STOP.
a=b
und
b = r,
d.h. berechne
ggT(b, a mod b).
ggT(29393, 2805).
ggT(a, b)
ggT(29393, 2805)
ggT(2805, 1343)
ggT(1343, 119)
ggT(119, 34)
ggT(34, 17)
Aufruf von
r = a mod b
1343
119
34
17
0
29393 = 10 · 2805 + 1343
(4.1)
2805 = 2 · 1343 + 119
1343 = 11 · 119 + 34
(4.2)
(4.3)
119 = 3 · 34 + 17
34 = 2 · 17 + 0
(4.4)
ggT(29393, 2805) = 17
Lemma 4.24
b
ggT(a, b) = ggT(a mod b, b).
Satz 4.22 (Euklidischer Algorithmus).
(2) Ist
a mod b
q.
für den Quotienten
(Lemma von Bézout
15 ). Seien
a, b ∈ Z.
Dann gibt es
ggT(a, b) = x · a + y · b.
15 Étienne Bézout; 1730 1783
17
x, y ∈ Z,
so dass
Bemerkung 4.25.
Diese Zahlen
x, y
lassen sich leicht aus dem Euklidischen Algorithmus berechnen, wenn
man in jedem Schritt bei der Berechnung von
r = a mod b
auch die Zahl
m∈N
mit
a = m·b+r
abspeichert.
Beispiel 4.26 (ggT(29393, 2805) (fortgesetzt)). Aus (4.4) folgt
17 = 119 − 3 · 34.
Mit (4.3) erhält man
17 = 119 − 3 · (1343 − 11 · 119) = 34 · 119 − 3 · 1343.
Mit (4.2) erhält man
17 = 34 · (2805 − 2 · 1343) − 3 · 1343 = 34 · 2805 − 71 · 1343.
Und abschlieÿend mit (4.1)
17 = 34 ∗ 2805 − 71 · (29393 − 10 · 2805) = −71 · 29393 + 744 · 2805.
Beispiel 4.27. Man kann die Zahlen
ri , q i , si , t i
gut tabellieren. Wir machen dies am Beispiel
a = 126
und
b = 35:
i
0
1
2
3
4
5
Es gilt
qi
3
1
1
2
ri
126
35
21
14
7
0
si
1
0
1
−1
2
ti
0
1
−3
4
−7
2 · 126 + (−7) · 35 = 7.
Satz 4.28
(Primfaktorzerlegung)
.
Jede natürliche Zahl gröÿer als
1
lässt sich eindeutig (bis auf die Reihen-
folge) als Produkt von Primzahlen schreiben.
Denition 4.29
. Seien a, b ∈ Z
m den gleichen Rest lassen,
a kongruent b mod(ulo) m.
(Kongruente Zahlen)
falls sie bei Division durch
a ≡ b mod m,
•
gesprochen
Mit der Notation aus Beispiel 3.11 gilt also:
Rm
Restklasse
•
und
m ∈ N. a und b heiÿen kongruent modulo m,
a mod m = b mod m. Man schreibt dafür
d.h. falls
a ≡ b mod m
genau dann, wenn
Man kann leicht zeigen, dass die Relation ≡ eine Äquivalenzrelation auf
Satz 4.30.
Sei
a, b
in der gleichen
enthalten sind.
a ≡ b mod m
und
c ≡ d mod m.
Z
ist.
Dann gilt
a + c ≡ (b + d) mod m,
a · c ≡ (b · d) mod m.
Notation 4.31.
Sei
m ∈ N, m ≥ 2.
i) Sei
Zm = {[0]m , [1]m , . . . , [m − 1]m }
die Menge der Restklassen bei Division durch
ii) Auf der Menge
Zm
wird nun eine Addition
⊕
m
(siehe Beispiel 3.11).
und Multiplikation
[a]m ⊕ [b]m = [a + b]m
18
und
wie folgt deniert:
[a]m [b]m = [a · b]m
Bemerkung 4.32.
Aufgrund von Satz 4.30 sind
⊕
und
wohldeniert, d.h. für
[c]m = [a]m , [d]m = [b]m
gilt
[a]m ⊕ [b]m = [c]m ⊕ [d]m
Also sind
⊕
und
Abbildungen von
Zm × Zm
Beispiel 4.33 (Verknüpfungstafeln für
Beispiel 4.34 (Verknüpfungstafeln für
und
nach
[a]m [b]m = [c]m [d]m .
Zm .
m = 4).
⊕
[0]4
[1]4
[2]4
[3]4
[0]4
[0]4
[1]4
[2]4
[3]4
[1]4
[1]4
[2]4
[3]4
[0]4
[2]4
[2]4
[3]4
[0]4
[1]4
[3]4
[3]4
[0]4
[1]4
[2]4
[0]4
[1]4
[2]4
[3]4
[0]4
[0]4
[0]4
[0]4
[0]4
[1]4
[0]4
[1]4
[2]4
[3]4
[2]4
[0]4
[2]4
[0]4
[2]4
[3]4
[0]4
[3]4
[2]4
[1]4
m = 5).
⊕
[0]5
[1]5
[2]5
[3]5
[4]5
[0]5
[0]5
[1]5
[2]5
[3]5
[4]5
[1]5
[1]5
[2]5
[3]5
[4]5
[0]5
[2]5
[2]5
[3]5
[4]5
[0]5
[1]5
[3]5
[3]5
[4]5
[0]5
[1]5
[2]5
[4]5
[4]5
[0]5
[1]5
[2]5
[3]5
[0]5
[1]5
[2]5
[3]5
[4]5
[0]5
[0]5
[0]5
[0]5
[0]5
[0]5
[1]5
[0]5
[1]5
[2]5
[3]5
[4]5
[2]5
[0]5
[2]5
[4]5
[1]5
[3]5
[3]5
[0]5
[3]5
[1]5
[4]5
[2]5
[4]5
[0]5
[4]5
[3]5
[2]5
[1]5
Bemerkung 4.35.
i) Sowohl bei
(Z4 , ⊕)
als auch bei
(Z5 , ⊕)
gilt
[a]m ⊕ [0]m = [a]m ,
und für jedes
[a]m ∈ Zm
existiert ein
[a0 ]m ∈ Zm
mit
[a]m ⊕ [a0 ]m = [0]m .
ii) Für
(Z4 , )
und
(Z5 , )
gilt analog
[a]m [1]m = [a]m ,
[2]4 gibt es kein Element in Z4
∈ Zm \ {[0]m } ein [a0 ]m ∈ Zm mit
aber für
[a]m
mit
[2]4 · [a0 ]4 = [1]4 .
[a]m [a0 ]m = [1]m .
19
Für
m=5
gibt es hingegen für jedes
Denition 4.36
.
(Gruppe)
G
Sei
eine nichtleere Menge, und sei
⊗ : G×G → G
mit
(x, y) 7→ x ⊗ y
eine
Abbildung (Verknüpfung).
(G, ⊗)
heiÿt Gruppe, wenn die folgenden Bedingungen 1.3. erfüllt sind:
1. Für alle
x, y, z ∈ G
gilt:
(x ⊗ y) ⊗ z = x ⊗ (y ⊗ z)
2. Es gibt ein neutrales Element
3. Zu jedem
−1
x
•
x∈G
e ∈ G,
(Assoziativgesetz).
so dass für alle
gibt es ein inverses Element
x0 ∈ G,
x∈G
gilt:
so dass
e ⊗ x = x.
x0 ⊗ x = e.
Das Element
x0
wird auch mit
bezeichnet.
Gilt zusätzlich
x⊗y =y⊗x
für alle
x, y ∈ G,
dann heiÿt
(G, ⊗)
16 ) Gruppe.
kommutative (abelsche
Man kann zeigen, dass in einer Gruppe gilt:
• x⊗e=x
für alle
• x ⊗ x0 = e
für alle
x∈G
(Linksneutral=Rechtsneutral).
x∈G
•
Das neutrale Element
•
Das inverse Element
e
(Linksinvers=Rechtsinvers) .
ist eindeutig bestimmt.
x−1
ist eindeutig bestimmt.
Beispiel 4.37.
• (Z, +)
ist kommutative Gruppe mit neutralem Element
(Q, +), (R, +)
Ebenso sind
• (Q \ {0}, ·)
und für
ist kommutative Gruppe mit neutralem Element
Element. Ebenso ist
• (Sn , ◦)
0,
a∈Z
ist
−a
das inverse Element.
kommutative Gruppen.
(R \ {0}, ·)
ist Gruppe mit neutralem Element
Umkehrabbildung gegeben.
Sn
1,
und für
a ∈ Q \ {0}
ist
1/a
das inverse
kommutative Gruppe.
id{1,...,n} ,
und das inverse Element von
ist nicht kommutativ für
σ ∈ Sn
ist durch die
n ≥ 3.
• (Zm , ⊕) ist kommutative Gruppe mit neutralem Element [0]m , und für [a]m ∈ Zm
ist
[−a]m = [m − a]m
das inverse Element.
• (Z4 \ {0}, )
ist keine Gruppe, aber
Denition 4.38
(Körper)
(Addition), bzw.
(x, y) 7→ x · y
.
Sei
K
(Z5 \ {0}, )
ist kommutative Gruppe.
+, · : K × K → K mit (x, y) 7→ x + y
(K, +, ·) heiÿt Körper, wenn die folgenden
eine nichtleere Mengen, und seien
(Multiplikation) Abbildungen.
Bedingungen 1.3. erfüllt sind:
1.
(K, +)
ist kommutative Gruppe.
Das neutrale Element von
2.
(K \ {0}, ·)
wird mit
0
bezeichnet.
ist kommutative Gruppe.
Das neutrale Element von
3. Für alle
(K, +)
x, y, z ∈ K
gilt:
(K \ {0}, ·)
wird mit
1
x · y + x · z = x · (y + z)
Beispiel 4.39.
• (Q, +, ·), (R, +, ·)
• (Z, +, ·)
sind Körper.
ist kein Körper.
16 Niels Abel, 18021829
20
bezeichnet und Einselement genannt.
(Distributivgesetz).
Satz 4.40. (Zm , ⊕, )
ist genau dann ein Körper, wenn
m
Primzahl ist.
Der Vollständigkeit halber wollen wir hier noch zwei Abschwächungen des Gruppenbegris angeben:
Denition 4.41.
Sei
G eine nichtleere Menge, und sei ⊗ : G × G → G mit (x, y) 7→ x ⊗ y
1.
(G; ⊗) heiÿt eine Halbgruppe,
alle x, y, z ∈ G gilt.
2.
(G; ⊗)
•
4.2
wenn
⊗
assoziativ ist, also
heiÿt ein Monoid, wenn es zusätzlich ein Element
Man kann zeigen, dass das neutrale Element
e
eine Verknüpfung.
x, y, z ∈ G
gilt:
e
x⊗e=e⊗x=x
gibt mit
(x ⊗ y) ⊗ z = x ⊗ (y ⊗ z)
für alle
für
x ∈ G.
in einem Monoid eindeutig bestimmt ist.
Komplexe Zahlen
Denition 4.42
.
(Komplexe Zahlen)
Die Menge
C = {x + y · i : x, y ∈ R}
heiÿt Menge der komplexen Zahlen. Dabei ist
i∈C
deniert durch
i2 = i · i = −1
und heiÿt imaginäre Einheit.
z = x + y · i ∈ C heiÿt x Realteil von z und wird mit Re(z) bezeichnet. y heiÿt Imaginärteil von z
Im(z) bezeichnet.
0
0
0
0
0
Zwei komplexe Zahlen z = x + y i und z = x + y i sind gleich, d.h. z = z , genau dann, wenn x = x
0
y=y.
Für
und
wird mit
•
Es ist
•
Betrachtet man die imaginäre Einheit als eine Variable mit der Eigenschaft
und
N ⊂ Z ⊂ Q ⊂ R ⊂ C.
i2 = −1, dann ergeben sich
Addition und Multiplikation von komplexen Zahlen unmittelbar aus den entsprechenden Operationen
für reelle Zahlen.
Seien
z = x + y i, z 0 = x0 + y 0 i ∈ C:
z + z 0 = (x + y i) + (x0 + y 0 i)
= (x + x0 ) + (y + y0) i.
z · z 0 = (x + y i) · (x0 + y 0 i) = x · x0 + x · y 0 i + y i · x0 + y i · y 0 i
= x x0 + y y 0 i2 + x y 0 i + y x0 i
= x x0 − y y 0 + (x y 0 + y x0 ) i.
•
Weiterhin ist für
z = x + y i 6= 0 (= 0 + 0 i)
1
x
y
= 2
− 2
i.
2
x+yi
x +y
x + y2
z −1 =
Satz 4.43. (C, +, ·)
Denition 4.44
i)
ii)
ist ein Körper mit neutralem Element
.
(Konjugierte Zahl, Betrag)
z = x−yi ∈ C
p
|z| = x2 + y 2
heiÿt die zu
z
Sei
0 (= 0 + 0 i)
z = x + y i ∈ C.
konjugierte (komplexe) Zahl.
heiÿt der Betrag der komplexen Zahl
21
z.
und Einselement
1 (= 1 + 0 i).
Satz 4.45.
i)
ii)
Seien
z, z 0 ∈ C.
z + z0 = z + z0
z=z
und
z · z0 = z · z0.
genau dann, wenn
iii)
|z|2 = z · z .
iv)
z −1 = z/|z|2 , z 6= 0.
Denition 4.46
z ∈ R.
(Polardarstellung)
.
Jede komplexe Zahl
z = x + y i ∈ C, z 6= 0,
lässt sich eindeutig in der
Form
z = r (cos φ + i sin φ)
darstellen. Dabei ist
r = |z|,
und
φ
ist der Winkel zwischen
cos φ =
(4.5) heiÿt Polardarstellung von
Bemerkung 4.47.
Für
z,
und
(r, φ)
x
|z|
und
z
(4.5)
und der reellen Achse, also
sin φ =
y
.
|z|
nennt man Polarkoordinaten von
z = r(cos φ + i sin φ), z 0 = r0 (cos φ0 + i sin φ0 ) ∈ C
z.
ist (siehe Bemerkung 1.4).
z · z 0 = r(cos φ + i sin φ) · r0 (cos φ0 + i sin φ0 )
= r r0 (cos(φ + φ0 ) + i sin(φ + φ0 )) .
ex
Man kann die Exponentialfunktion
auf die komplexen Zahlen fortsetzen. Es gilt dann
eφ i = cos φ + i sin φ
für jede reelle Zahl
φ.
Das liefert
r(cos φ + i sin φ) = reφ i .
Für die so denierte Exponentialfunktion gelten immer noch die üblichen Rechenregeln, insbesondere
0
0
e i(φ+φ ) = e iφ · e iφ .
Daraus lassen sich leicht die Additionstheoreme für den Sinus und Cosinus ableiten.
Lemma 4.48
(Formel von Moivre
17 ). Für
z = r (cos φ + i sin φ)
und
n∈N
gilt:
z n = rn (cos(n · φ) + i sin(n · φ)).
Denition 4.49
.
(Einheitswurzeln)
Die Zahlen
ζnk
heiÿen die
n-ten
Es ist
•
Die Zahlen
= cos
2k π
n
+ i sin
2k π
n
Einheitswurzeln.
(ζn )n = 1,
•
n ∈ N denieren wir
2π
2π
ζn := cos
+ i sin
,
n
n
Für
also
(ζnk )n = 1
ζn0 , . . . , ζnn−1
für
k = 0, . . . , n − 1.
sind paarweise verschieden.
17 Abraham de Moivre, 16671754
22
,
k = 0, . . . , n − 1
•
n−1
X
ζnk = 0.
k=0
•
Die
n-ten
Einheitswurzeln bilden bzgl. der Multiplikation in
Bemerkung 4.50.
gilt
Sei
eine Gruppe.
z = r (cos φ + i sin φ) ∈ C und n ∈ N. Für
√
φ
φ
n
wk = r cos + i sin
· ωkn , k = 0, . . . , n − 1,
n
n
Sei
(wk )n = z . wk , k = 0, . . . , n − 1,
Notation 4.51.
C
n-ten
sind die
z = r (cos φ + i sin φ).
√
Wurzeln von
z.
Als (Quadrat)-Wurzel von
z=
√
r
cos
φ
φ
+ i sin
2
2
z,
im Zeichen
√
z,
versteht man
.
Beispiel 4.52.
•
•
√
−1 = i,
Für
√
i=
√1
2
x ∈ R, x ≤ 0,
Satz 4.53
+
ist
√1 i.
2
√
x=
p
|x| i.
.
(Fundamentalsatz der Algebra)
Jede Polynomfunktion
f :C→C
f (z) = an z n + an−1 z n−1 + . . . + a1 z + a0 ,
mit
an 6= 0
der Form
ai ∈ C,
besitzt eine Darstellung
f (z) = an (z − c1 ) · (z − c2 ) · . . . · (z − cn ),
mit
ci ∈ C, 1 ≤ i ≤ n.
Beispiel 4.54.
•
Sei
f (z) = z 2 + a1 z + a0 .
Mit
a1
c1 = − +
2
ist
r
a1 2
− a0 ,
2
a1
c2 = − −
2
r a 2
1
2
− a0
f (z) = (z − c1 )(z − c2 ).
• z 2 + 1 = (z − i)(z + i), z 4 − 1 = (z − 1)(z − i)(z + 1)(z + i).
Qn−1
• z n − 1 = k=0 (z − ζnk ).
Satz 4.55.
Sei
•
Ist
z∈C
•
Ist
n
f :C→C
mit
mit
f (z) = 0,
f (x) = an xn + an−1 xn−1 + . . . + a1 x + a0 ,
dann ist auch
ungerade, dann gibt es ein
f (z) = 0.
x? ∈ R
mit
f (x? ) = 0.
23
wobei
ai ∈ R
und
an 6= 0.
5 Lineare Gleichungssysteme und Matrizen
5.1
Lineare Gleichungssysteme
Notation 5.1.
Im Folgenden sei
(K, +, ·) ein
Körper (z.B.
Q, R, C, Z2 , Z3 ,
etc.). Die Elemente von
K heiÿen
Skalare.
Denition 5.2
(Lineares Gleichungssystem)
Gleichungen mit
n
.
Unbekannten
x1 , . . . , xn
Ein lineares Gleichungssystem (über dem Körper
K)
aus
m
hat die Form
a1 1 x1 + a1 2 x2 + · · · + a1 n xn = b1
a2 1 x1 + a2 2 x2 + · · · + a2 n xn = b2
.
.
.
.
.
.
.
.
.
.
= ..
(5.1)
am 1 x1 + am 2 x2 + · · · + am n xn = bm .
Dabei sind alle Koezienten
ai j , 1 ≤ i ≤ m, 1 ≤ j ≤ n,
und
b i , 1 ≤ i ≤ m,
L = {(x1 , . . . , xn ) ∈ Kn : x1 , . . . , xn
aus
K.
Die Menge
erfüllen (5.1)}
heiÿt Lösungsmenge des Gleichungssystems.
Beispiel 5.3.
•
Das lineare Gleichungssystem über
Q
2 x1 + 3 x2 = 0
2 x1 + 3 x2 = 1
besitzt keine Lösung.
•
Das lineare Gleichungssystem über
R
x1 + x2 = 0
x1 − x2 = 0
besitzt genau eine Lösung
•
(x1 , x2 ) = (0, 0).
Das lineare Gleichungssystem über
x1
x1
2 x1
R
+ 2 x2
+ 2 x2
+ 4 x2
+
2 x3
3 x3
besitzt etwa die Lösung
Lemma 5.4.
(x1 , x2 , x3 , x4 ) = (−2, 0, −1, 3)
+
x4
+ 3 x4
+ 3 x4
+ 2 x4
oder
(x1 , x2 , x3 , x4 ) = (0, −1, −1, 3).
Die Lösungsmenge eines linearen Gleichungssystems über
i) zwei Gleichungen vertauscht,
ii) das
λ-fache
einer Gleichung zu einer anderen addiert,
iii) eine Gleichung mit
λ ∈ K \ {0}
multipliziert.
24
= 1
= 5
= 5
= 3
λ ∈ K,
K (5.1) ändert sich nicht, wenn man
•
Der Gauÿ'sche Algorithmus (auch Gauÿ'sches Eliminationsverfahren genannt) benutzt die Regeln aus
Lemma 5.4 sukzessive, um ein gegebenes lineares Gleichungssystem in ein anderes zu überführen, bei
dem man die Lösungsmenge direkt ablesen kann.
Beispiel 5.5.
•
Gegeben sei folgendes Gleichungssystem über
R
x1 + 2 x2
+ x4 = 1
x1 + 2 x2 +2 x3 + 3 x4 = 5
2 x1 + 4 x2
+ 3 x4 = 5
3 x3 + 2 x4 = 3
•
Addition des
(−1)-fachen
der 1.ten Gleichung zur 2.ten Gleichung, und des
(−2)-fachen
der 1.ten
Gleichung zur 3.ten führt zu
x1 + 2 x2
+ x4 = 1
2 x3 + 2 x4 = 4
x4 = 3
3 x3 + 2 x4 = 3
•
Addition des
(−3/2)-fachen
der 2.ten Gleichung zur 4.ten Gleichung führt zu
x1 + 2 x2
+ x4 = 1
2 x3 + 2 x4 = 4
x4 = 3
−x4 = −3
•
Addition der 3.ten Gleichung zur 4.ten Gleichung führt zu
x1 + 2 x2
+ x4 = 1
2 x3 + 2 x4 = 4
x4 = 3
0=0
Hieraus lassen sich die Lösungen sofort ablesen:
•
Die 3.te Gleichung besagt
•
Diesen Wert von
•
Setzt man nun die Werte für
•
Also ist
x4
x4 = 3.
eingesetzt in die 2.te Gleichung ergibt
x3
und
x4
x3 = −1.
in die 1.te Gleichung ein, so erhält man
x1 + 2 x2 = −2.
L = {(x1 , x2 , −1, 3) : x1 + 2 x2 = −2}
= {(−2 − 2 x2 , x2 , −1, 3) : x2 ∈ R}.
Denition 5.6
.
(Matrix)
a1 1
a2 1
A= .
..
am 1
Eine Anordnung von Skalaren
a1 2
a2 2
···
···
.
.
.
..
am 2
···
.
ai j ∈ K
in
m
Zeilen und
n
a1 n
a2 n
. ,
.
.
am n
kurz
25
A = (ai j ) i=1,...,m
j=1,...,n
oder
A = (ai j ),
Spalten der Form
m × n-Matrix oder (m, n)-Matrix genannt. Die ai j heiÿen die Elemente oder Koezienten der Matrix.
i, gibt die Zeilennummer (Zeilenindex), der zweite die Spaltennummer (den Spaltenindex)
in der ai j steht.
wird
Der erste Index,
an,
•
Die Menge aller
•
Etwas formaler deniert man
•
Sind alle Koezienten von
•
Eine Matrix mit
Denition 5.7
(m, n)-Matrizen
n=m
A
mit Koezienten aus
(m, n)-Matrizen
gleich
0,
wird mit
K
als Abbildungen
A
dann heiÿt
Km×n
bezeichnet.
{1, . . . , m} × {1, . . . , n} → K.
Nullmatrix und wird mit
0
bezeichnet.
heiÿt quadratisch, siehe auch Denition 5.26.
.
(Koezientenmatrix eines linearen Gleichungssystems)
Für ein lineares Gleichungssystem
a1 1 x1 + a1 2 x2 + · · · + a1 n xn = b1
a2 1 x1 + a2 2 x2 + · · · + a2 n xn = b2
.
.
.
.
.
.
.
.
.
.
= ..
(5.2)
am 1 x1 + am 2 x2 + · · · + am n xn = bm
über
K
heiÿt
a1 1
a2 1
A= .
..
am 1
a1 2
a2 2
···
···
.
.
.
..
am 2
···
a1 n
a2 n
m×n
. ∈ K
.
.
am n
.
die Koezientenmatrix des Gleichungssystems.
Die Matrix
a1 1
a2 1
(A, b) = .
..
am 1
a1 2
a2 2
···
···
a1 n
a2 n
.
.
.
..
.
.
.
am 2
···
.
b1
b2
m×(n+1)
. ∈ K
.
.
bm
am n
heiÿt erweiterte Matrix des Gleichungssystems.
Beispiel 5.8. Für das lineare Gleichungssystem aus Beispiel 5.5 ergeben sich die Koezientenmatrix und
erweiterte Matrix
1
1
A=
2
0
Denition 5.9
2
2
4
0
0
2
0
3
1
3
∈ R4×4 ,
3
2
1
1
(A, b) =
2
0
(Elementare Zeilenumformungen einer Matrix)
2
2
4
0
.
Sei
0
2
0
3
1
3
3
2
1
5
∈ R4×5 .
5
3
A ∈ Km×n .
Unter elementaren Zeile-
numformungen versteht man die folgenden drei Operationen:
i)
Vk,l :
Das Vertauschen der
ii)
Ak,l (λ):
iii)
Mk (λ):
•
Addition des
k -ten
λ-fachen
Multiplikation der
mit der l -ten Zeile aus
der
k -ten
k -ten
Zeile von
Zeile von
A
mit
A
A.
zu der l -ten Zeile von
A, λ ∈ K,
λ ∈ K \ {0}.
Mittels elementarer Zeilenumformungen kann jede Matrix in eine sogenannte Stufenform überführt
werden.
26
Beispiel 5.10. Überträgt man die Umformungen aus Beispiel 5.5 auf die zugehörige erweiterte Matrix des
Gleichungssystems (siehe Beispiel 5.8), dann ergeben sich die folgenden elementaren Zeilenumformungen:
1
1
2
0
2
2
4
0
0
2
0
3
1
3
3
2
2
0
0
0
0
2
0
0
1
2
1
−1
1
A2,4 (−3/2) 0
→
0
0
Denition 5.11 ((Zeilen)Stufenform).
1
5
5
3
2
0
0
0
0
2
0
3
2
0
0
0
0 1 1
1 1 2
0 1 3
0 0 0
1
A1,2 (−1),A1,3 (−2) 0
→
0
0
1
4
3
−3
Eine Matrix
1
A3,4 (1),M2 (1/2) 0
→
0
0
A ∈ Km×n
1
4
3
3
1
2
1
2
hat (Zeilen)Stufenform wenn sie die folgende
Darstellung hat:
0
A=
0
0
0
...
...
...
...
0
0
0
0
1
0
0
0
∗
...
...
...
...
0
0
0
∗
1
0
0
∗
∗
...
...
...
...
0
0
∗
∗
1
0
∗
∗
∗
...
...
...
...
0
∗
∗
∗
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
∗ irgendwelche Elemente aus K.
A ist in (Zeilen)Stufenform wenn A = 0, oder es gibt
1 ≤ k1 < k2 < . . . < kr ≤ n mit folgenden Eigenschaften:
∗
∗
∗
∗
.
.
.
...
...
...
...
∗
∗
∗
∗
.
.
.
.
.
.
.
Hierbei sind
In Worten :
Zahlen
i) Für
ii) Für
i > r , 1 ≤ j ≤ n,
1≤i≤r
ist
ist
ein
r ∈ {1, . . . , m}
und eine Folge von
ai j = 0,
ai ki = 1
und
ai j = 0
für
j < ki .
k1 , . . . , kr sind (heiÿen) die Spaltenindizes der Stufen. Wenn dabei in den Spalten k1 , . . . , kr jeweils nur ein
6= 0 ist (d.h. oberhalb der Einsen in den Zellen (ki , ki ) sind alle Einträge 0), so nennen wir die Matrix
Eintrag
in zeilenreduzierter Stufenform.
Bemerkung 5.12.
A 6= 0 in Stufenform und ist i ≤ r, dann steht das erste von Null verschiedene Element (eine
i-ten Zeile der Matrix in der ki -ten Spalte. Mit wachsendem i wandern diese ersten von Null
verschiedenen Glieder wegen ki < ki+1 nach rechts.
i) Ist
1) der
ii) Ist
A 6= 0
Satz 5.13.
in Stufenform, dann hat
Jede Matrix
A ∈ Km×n
A
genau
r
Zeilen, in der nicht nur Nullen stehen.
kann durch elementare Zeilenumformungen in (zeilenreduzierte) Stufen-
form gebracht werden. Die zeilenreduzierte Stufenform ist dabei eindeutig. Wir sprechen deshalb auch von
einer Normalform.
Bemerkung 5.14.
•
Eine Matrix kann auf verschiedene Weisen durch elementare Zeilenumformungen
in Zeilenstufenform gebracht, d.h. es gibt nicht nur eine Abfolge von Umformungen, die Zeilenstufenform produziert.
•
Die Zeilenstufenform ist nicht eindeutig. Eindeutigkeit erhält man erst in der zeilenreduzierten Form.
•
Es ist mit den bislang in der Vorlesung entwickelten Methoden noch nicht möglich, die Eindeutigkeit
der zeilenreduzierten Stufenform zu beweisen!
•
Sei
B
die zeilenreduzierte Normalform von
A,
d.h.
A
kann durch elementare Zeilenumformungen in
transformiert werden. Dann heiÿt die Anzahl der Zeilen
6= 0
in
B
der Rang von
A.
den bislang entwickelten Methoden noch nicht einmal zeigen, dass der Rang eindeutig ist.
27
A
Wir können mit
Denition 5.15.
Sei
A = (ai j )
(m, n)-Matrix, ar s 6= 0.
eine
Dann sei
Pr,s
die Hintereinanderausführung
folgender elementarer Zeilenumformungen:
Ar,i (−
ai s
),
ar s
i = 1, . . . , m, i 6= r,
sowie abschlieÿend
Mr (
Dadurch wird aus der Spalte
s
1
).
ar s
A
von
0
0
..
.
0
1
0
.
..
0
wobei der Eintrag
1
an der
r-ten
Position steht. Wir nennen
Pr,s
einen Pivotschritt mit dem Pivotelement
ar s .
Satz 5.16
Matrix
A
.
(Gauss-Jordan-Verfahren)
Sei
A = (ai j )
•
Suche die erste Spalte kr in der Matrix
der Algorithmus terminiert.
•
Durch Zeilenvertauschungen erreicht man
•
Wende Pivotschritt
•
eine
m × n-Matrix.
Setze
r=1
und verfahre mit der
gleich
0
wie folgt:
Pr,kr
auf
A
A
so, dass nicht alle
ar kr , . . . , am kr
sind. Sonst STOP,
ar kr 6= 0.
an.
Die so erhaltene Matrix nennen wir jetzt
A
und setzen
r
auf
r + 1.
Nun wiederholen wir die oben
beschriebenen Schritte.
Das Verfahren wird einfacher, wenn wir nicht an der zeilenreduzierten Stufenform interessiert sind, sondern
an (irgendeiner) Zeilenstufenform. Dann ist es im Pivotschritt nicht notwendig, die Einträge oberhalb des
Pivotelementes zu Null zu machen. Das Verfahren wird dadurch etwas schneller. Wir sprechen dann vom
Gauss-Verfahren (Gauss'sches Eliminationsverfahren).
Bemerkung 5.17
(Gauÿ-Algorithmus). Mittels elementarer Zeilenumformungen kann die erweiterte Mam×(n+1)
0 0
0
trix (A, b) ∈ K
eines linearen Gleichungssystems in Stufenform (A , b ) überführt werden. Sei A =
0
0
0
0 0
0
(ai j ) i=1,...,m und b = (b1 , . . . , bm ). Dann hat (A , b ) die Gestalt
j=1,...,n
0
0
0
0 0
(A , b ) = 00
0
0
0
0
...
...
0
0
1
0
∗
...
...
0
...
1
...
∗
...
...
...
...
...
...
...
...
...
...
1
...
...
...
...
...
...
...
...
...
...
...
...
...
1
...
...
0
0
.
.
.
.
.
.
.
.
.
...
0
b01
b02
.
.
.
.
.
.
b0r
b0r+1
0
.
.
.
0
b0r+1 ∈ {0, 1}.
0 0
Das zu (A , b ) zugehörige Gleichungssystem hat die gleiche Lösungsmenge wie das gegebene Gleichungssystem
Dabei ist
(siehe Lemma 5.4).
28
•
Ist
b0r+1 = 1,
dann lautet die
(r + 1)-te
Gleichung des Gleichungssystems
(A0 , b0 )
0 x1 + 0 x2 + · · · + 0 xn = 1.
Also hat das Gleichungssystem keine Lösung.
•
Sei
b0r+1 = 0
1 ≤ k1 < k2 < · · · < kr ≤ n
(A0 , b0 ) gegeben durch
und seien
Gleichungssystem
xk1 +
xk2 +
n
X
j=k1 +1
n
X
die Spaltenindizes der Stufen. Dann ist das
a01 j xj = b01 ,
a02 j xj = b02 ,
j=k2 +1
.
.
.
xkr +
n
X
.
.
.
a0r j xj = b0r .
j=kr +1
xj , auÿer xk1 , . . . , xkr frei wählbar; aus der Wahl von xj , j ∈
/ {k1 , . . . , kr }, lassen sich
xk1 , . . . , xkr rückwärts berechnen:
In diesem Fall sind alle
dann die restlichen
xkr = b0r −
n
X
a01 j xj ,
j=kr +1
n
X
xkr−1 = b0r−1 −
a0r−1 j xj ,
j=kr−1 +1
.
.
.
xk1 = b01 −
.
.
.
n
X
a01 j xj .
j=k1 +1
Satz 5.18.
Mit der obigen Notation gilt:
0
i) Ist br+1
ii) Ist
=1
b0r+1 = 0
a) Ist
b) Ist
dann ist das Gleichungssystem nicht lösbar.
dann ist das Gleichungssystem lösbar.
r = n,
r < n,
Bemerkung 5.19.
dann ist das Gleichungssystem eindeutig lösbar.
dann gibt es mehrere Lösungen.
Die Zahl
n−r
heiÿt die Anzahl der Freiheitsgrade, die Zahl
r
der Rang des Gleichungs-
systems, siehe Bemerkung 5.14. Sobald wir im nächsten Kapitel gezeigt haben, dass der Rang einer Matrix
eindeutig bestimmt ist, wissen wir das auch für lineare Gleichungssysteme!
5.2
Matrizenrechnung
Denition 5.20
Addition von
A
. Seien A, B ∈ Km×n mit A = (ai j ) und B = (bi j ).
A + B , deniert als
a1 1 + b1 1
a1 2 + b1 2 · · · a1 n + b1 n
a2 1 + b2 1
a2 2 + b2 2 · · · a2 n + b2 n
A+B =
.
.
.
..
.
.
.
.
.
.
.
am 1 + bm 1 am 2 + bm 2 · · · am n + bm n
(Addition von Matrizen)
und
B,
geschrieben
29
Dann ist die
Die Matrix
•
A+B
ist wieder eine
m × n-Matrix,
d.h.
A + B ∈ Km×n .
A, B ∈ Km×n , A = (ai j ), B = (bi j ) sind gleich, geschrieben A = B ,
ai j = bi j , für 1 ≤ i ≤ m, 1 ≤ j ≤ n.
Zwei Matrizen
wenn sie die
gleichen Koezienten haben, d.h. wenn
Denition 5.21
mit
λ,
(Multiplikation mit einem Skalar)
geschrieben
λ·A
(bzw.
λA),
λ a1 1
λ a2 1
λ·A= .
..
λ am 1
Satz 5.22.
i)
ii)
λ·A
ist wieder eine
Seien
A + (B + C) = (A + B) + C ,
A+0=A
iv)
λ(µ A) = (λ µ) A,
vi)
und
A ∈ Km×n
und
λ ∈ K.
Die Multiplikation von
A
λ a1 2
λ a2 2
···
···
.
.
.
..
λ am 2
···
d.h.
.
λ a1 n
λ a2 n
.
.
.
.
λ am n
λ · A ∈ Km×n .
Dann gilt
(Kommutativität),
iii)
v)
m × n-Matrix,
A, B, C ∈ Km×n , λ, µ ∈ K.
A + B =B + A,
Sei
ist deniert als
Die Matrix
.
(Assoziativität),
A + (−A) = 0,
1 A = A,
λ (A + B) = λ A + λ B
Insbesondere ist
(Km×n , +)
und
(λ + µ)A = λ A + µ A.
eine kommutative Gruppe mit neutralem Element
0,
und für
A ∈ Km×n
ist
−A
das inverse Element.
Bemerkung 5.23.
Sei
X
eine beliebige Menge und
K
ein Körper. Die hier für Matrizen angestellten Über-
legungen gelten auch für die Menge von Abbildungen
{f : X → K}.
Matrizen sind ja nur spezielle Abbildungen (mit
X = {1, . . . , m} × {1, . . . n}).
Denition 5.24
Sei
.
A ∈ Km×n . Die transponierte Matrix von A, bezeichnet
mit A (gesprochen A transponiert), ist deniert als die (n × m)-Matrix, deren Spalten gleich den Zeilen von
A, und deren Zeilen gleich den Spalten von A sind, d.h.
(Transponierte einer Matrix)
|
A| = (a|i j ) i=1,...,m
j=1,...,n
Bemerkung 5.25.
i)
ii)
iii)
Seien
A, B ∈ Km×n
mit
und
a|i j = aj i ,
λ ∈ K.
1 ≤ i ≤ n, 1 ≤ j ≤ m.
Dann gilt
(A + B)| = A| + B | ,
(λ A)| = λ A| ,
(A| )| = A.
Denition 5.26
(n, n)-Matrix A = (ai j )
A.
i) Eine
von
.
(Quadratische Matrizen)
heiÿt quadratisch. Die Elemente
30
ai i , 1 ≤ i ≤ n,
heiÿen Diagonalelemente
ii) Eine quadratische Matrix, bei der alle Elemente auÿer den Diagonalelementen Null sind, heiÿt Diago-
nalmatrix.
1
iii) Die Diagonalmatrix, bei der alle Diagonalelemente
iv) Eine quadratische Matrix
sind, heiÿt Einheitsmatrix. Bezeichnung:
In .
A = (ai j ), bei der alle Elemente unterhalb (oberhalb) der Diagonalen
Null
sind, d.h. für die
ai j = 0
1≤j<i≤n
für
ai j = 0
1≤i<j≤n
für
gilt, heiÿt obere (untere) Dreiecksmatrix.
v) Eine quadratische
Bemerkung 5.27.
Denition 5.28
von
A
B,
und
Ist
(n, n)Matrix A = (ai j )
A ∈ Kn×n
mit
ai j = aj i
symmetrisch, dann gilt also
.
A·B
geschrieben
A B ),
(bzw.
n
X
ci j =
ist die
1 ≤ i, j ≤ n
heiÿt symmetrisch.
A| = A.
A ∈ Km×n und sei B ∈ Kn×r . Das Produkt
m × r-Matrix C = (ci j ), deren Koezienten deniert
(Produkt (Multiplikation) von Matrizen)
sind als
für alle
Sei
ai k bk j = ai 1 b1 j + ai 2 b2 j + · · · + ai n bn j ,
k=1
für
1 ≤ i ≤ m, 1 ≤ j ≤ r.
Man beachte: Das Produkt
Zeilen von
B
A·B
ist nur deniert, wenn die Anzahl der Spalten von
A
gleich der Anzahl der
ist!
m
×n
mal
n×r
ergibt
m × r .
Satz 5.29.
i)
ii)
A(B C) = (A B)C ,
für
A ∈ Km×n , B ∈ Kn×r , C ∈ Kr×q
(A + B) C = A C + B C für A, B ∈ Km×n , C ∈ Kn×r ,
B, C ∈ Kn×r (Distributivität)
iii)
(λ A)B = λ(A B) = A(λ B),
iv)
(A B)| = B | A|
•
für
bzw.
A(B + C) = A B + A C
für
A ∈ Km×n ,
A ∈ Km×n , B ∈ Kn×r , λ ∈ K,
A ∈ Km×n , B ∈ Kn×r .
Im Allgemeinen ist die Matrixmultiplikation nicht kommutativ:
−1
−1
1
1
•
für
(Assoziativität),
Für
A ∈ Kn×n
und
In ∈ Kn×n
·
1
1
1
−1
=
0
0
2
2
6=
2
0
−2
0
=
1
1
1
−1
·
1
1
−1
−1
ist
A · In = In · A = A.
•
Ist
A ∈ Kn×n
eine quadratische Matrix, so ist
A · A, A · A · A
usw. immer deniert und man schreibt
abkürzend
A1 = A,
Zudem setzt man
•
Sei
A2 = A A,
. . . , An = AAn−1 , n ∈ N.
A0 = In .
A ∈ Km×n , A = (ai j ),
und sei
x
die
n × 1-Matrix mit
x1
x2
x = . .
..
xn
31
den Unbekannten
x1 , . . . , xn ,
d.h.
Dann ist
•
Ist nun
Pn
a1 j xj
a1 1 x1 + a1 2 x2 + · · · + a1 n xn
Pj=1
n
j=1 a2 j xj a2 1 x1 + a2 2 x2 + · · · + a2 n xn
Ax =
=
.
.
.
.
.
.
Pn
a
x
+
a
x
+
·
·
·
+
a
x
a
x
m1 1
m2 2
mn n
j=1 m j j
b ∈ Km×1
mit
b1
b2
b = . ,
..
bm
dann lässt sich das lineare Gleichungssystem (5.1) schreiben als
Ax = b.
Denition 5.30
Ax = b
.
((In)homogenes Gleichungssystem)
inhomogenes Gleichungssystem und
Satz 5.31.
Sei
v, w
A x = 0.
i) Sind
ii) Ist
v
A ∈ Km×n
iii) Wenn
Ax = b
A x = b,
Ax = b
Lösung von
A ∈ Km×n
und
b ∈ Km×1 .
Ist
b 6= 0,
dann heiÿt
heiÿt (das zugehörige) homogene Gleichungssystem.
b ∈ Km×1 .
und
Lösungen von
Ax = 0
Sei
z
und
dann ist
v−w
Lösung von
Lösung des zugehörigen homogenen Gleichungssystems
A x = 0,
dann ist
v+z
Lösung von
A x = b.
lösbar ist, dann ist die Lösung genau dann eindeutig, wenn das zugehörige homogene
Gleichungssystem
Ax = 0
x1 = x2 = · · · = xn = 0,
nur die triviale Lösung, d.h.
Elementare Zeilenumformungen von
A
hat.
lassen sich als Multiplikation mit Elementarmatrizen von links an
A
realisieren.
Denition 5.32.
Sei
n∈N
und
I
die Einheitsmatrix der Gröÿe
•
Die Matrix, die wir durch Anwendung von
Vk,l
•
Die Matrix, die wir durch Anwendung von
Ak,l (λ)
•
Die Matrix, die wir durch Anwendung von
Mk (λ)
Dabei wird das hochgestellte
Satz 5.33.
n
auf
I
n.
erhalten, nennen wir
auf
auf
I
I
n
Ek,l
.
erhalten, nennen wir
erhalten, nennen wir
n
(λ).
Ek,l
Ekn (λ).
meistens weggelassen, wenn es aus dem Zusammenhang hervorgeht.
Durch Anwendung von
Vk,l (Ak,l (λ), Mk (λ))
auf eine
(m, n)-Matrix A
erhält man die Matrix
Ek,l · A (Ek,l (λ) · A, Ek (λ) · A).
Bemerkung 5.34.
Denition 5.35
Multiplikation von rechts liefert entsprechend Spaltenumformungen!
(Inverse Matrix)
.
Sei
A ∈ Kn×n
eine quadratische Matrix. Gibt es eine Matrix
B ∈ Kn×n
mit
B · A = In ,
dann heiÿt die Matrix
Satz 5.36.
invertierbar oder reguläre Matrix.
(n, n)-Matrix A ist genau dann invertierbar, wenn sie den Rang n hat, das Gleichungssystem
b eindeutig lösbar ist. In diesem Fall gibt es eine Matrix B = P1 · Pn , die das Produkt
Elementarmatrizen ist, und für die B · A = I gilt. Die Matrix B selber ist auch wieder invertierbar.
Ax = b
von
A
Eine
also für jedes
32
Folgerung 5.37.
B
Element
die zu
A
Die Menge der invertierbaren
B·A
mit
(n, n)-Matrizen ist eine Gruppe. Insbesondere ist das inverse
A · B = I . Die Matrix B wird mit A−1 bezeichnet und
eindeutig bestimmt, und es gilt
inverse Matrix genannt.
•
Beispiel 5.38.
Sei
A=
4
b1 1 b1,2
. Gesucht ist eine Matrix B =
3
b2 1 b2 2
2 b1 1 + 4 b2 1 2 b1 2 + 4 b2 2
1 0
AB =
=
,
−b1 1 + 3 b2,1 −b1 2 + 3 b2 2
0 1
2
−1
mit
A B = I2 ,
d.h.
bzw.
•
2 b1 2 + 4 b2 2 = 0,
−b1 1 + 3 b2,1 = 0,
−b1 2 + 3 b2 2 = 1.
B erhält man also ein lineares Gleichungssystem.
b1 1 = 3/10, b2 1 = 1/10, b1 2 = −2/5 und b2 2 = 1/5. Somit ist
1 3 −4
−1
A =
.
10 1 2
Für jede Spalte der Matrix
steme führt zu
Satz 5.39.
Sei
A ∈ Kn×n
Lösen der Gleichungssy-
ei ∈ Kn×1 mit
0
0
1
1
0
0
e1 = 0 , e2 = 0 , . . . , en = ... ,
..
..
.
.
0
0
0
1
und seien
die Spalten der Einheitsmatrix
n
2 b1 1 + 4 b2 1 = 1,
lineare Gleichungssysteme in
In . Zum Bestimmen der inversen Matrix A−1 (falls sie existiert) müssen
n Unbekannten gelöst werden. Die j -te Spalte von A−1 ist die Lösung des
System
A x = ej .
Satz 5.40.
Sei
Satz 5.41.
Seien
i) Dann ist
ii)
A ∈ Kn×n
regulär. Das Gleichungssystem
A, B ∈ Kn×n
AB
Ax = b
hat die eindeutige Lösung
A−1 b.
regulär.
regulär und es gilt
(A B)−1 = B −1 A−1 ,
(A−1 )| = (A| )−1 ,
iii)
(A−1 )−1 = A,
iv)
(λA)−1 =
1
λ
A−1 , λ ∈ K \ {0}.
Eine Matrix ist genau dann regulär, wenn man sie als Produkt von Elementarmatrizen schreiben kann.
Denition 5.42.
mit
A = P · B.
•
A
und
B
P
gibt
A
und
P ·A
eine
heiÿen zeilenäquivalent wenn es eine invertierbare Matrix
Die Lösungsmengen von homogenen linearen Gleichungssystemen, deren Koezientenmatrizen
B
•
Zwei Matrizen
(Es ist oensichtlich, dass dies eine Äquivalenzrelation ist.)
zeilenäquivalent sind, sind gleich.
Bei der Gauss-Elimination sucht man letztlich nur eine invertierbare Matrix
besonders einfache Form hat.
33
P
so, dass
•
Jede Äquivalenzklasse (bzgl. der Relation zeilenäquivalent) enthält genau eine Matrix in zeilenreduzierter Stufenform.
Satz 5.43.
m Gleichungen und n ≥ m Unbekannten hat
x1 = . . . = xn = 0, wenn die Koezientenmatrix zur Einheitsmatrix
insbesondere n = m gelten.
Ein homogenes lineares Gleichungssystem mit
genau dann nur die triviale Lösung
zeilenäquivalent ist, es muss also
34
6 Vektorräume
Denition 6.1
.
(Vektorraum)
nicht-leere Menge
V
(K, ⊕, )
Sei
ein Körper mit Einselement
1.
Ein
K-Vektorraum
ist eine
mit zwei Verknüpfungen
+ : V × V → V,
· : K × V → V,
(v, w) 7→ v + w (Vektoraddition),
(λ, v) 7→ λ · v (Skalarmultiplikation)
so dass gilt:
i)
ii)
(V, +) ist kommutative Gruppe mit neutralem Element 0, und für a ∈ V
−a bezeichnet,
1·v =v
für alle
v ∈V,
iii)
(λ µ) · v = λ · (µ · v)
iv)
(λ ⊕ µ) · v = λ · v + µ · v
v)
Bemerkung 6.2.
V
λ, µ ∈ K
für alle
für alle
λ · (v + w) = λ · v + λ · w
Die Elemente von
und
λ, µ ∈ K
für alle
λ∈K
v ∈V,
und
und
v ∈V,
v, w ∈ V .
heiÿen Vektoren.
Aufgrund der Eigenschaften ii)-v), und da die entsprechenden Verknüpfungen immer aus
dem Zusammenhang ersichtlich sind, schreibt man auch einfach
(λ + µ) v
statt
wird das inverse Element mit
λv
statt
λ · v, (λµ) v
statt
(λ µ) · v
und
(λ ⊕ µ) · v.
Beispiel 6.3.
i)
Kn×m , d.h. die Menge aller n × m-Matrizen mit Koezienten aus K, bilden einen K-Vektorraum (siehe
Satz 5.22).
ii) Ist in i)
m = 1,
x1 , . . . , xn
dann schreibt man
Kn
Kn×1 .
anstatt
Die Koezienten von
x ∈ Kn
werden mit
bezeichnet, d.h.
x1
x2
x = . = (x1 , x2 , . . . , xn )| .
..
xn
Die Vektoraddition und Skalarmultiplikation sind in diesem Fall
n = 2
x1 + y1
x2 + y2
.
.
.
+ . =
..
.
.
.
xn
yn
xn + yn
x+y =
iii) Für
y1
y2
x1
x2
kann man sich den Vektorraum
x1
x2
R2
, λx = λ
.
.
.
xn
λ x1
λ x2
=
.
.
.
.
λ xn
als Ebene mit der bekannten Vektoraddition und
Skalarmultiplikation vorstellen.
iv) Analog kann man den
v) Sei
mit
R3
mit dem drei-dimensionalen Anschauungsraum identizieren.
M eine Menge und (K, +, ·) ein Körper. Die Menge
KM , ist ein K-Vektorraum mit den Verknüpfungen
aller Abbildungen von
+ : KM × KM → KM , (f, g) 7→ f + g
M
mit
(f + g)(x) = f (x) + g(x),
M
·:K×K
→ KM , (λ, f ) 7→ λ · f
35
mit
(λ · f )(x) = λ · f (x).
nach
K,
bezeichnet
f : K → K der Form f (x) = an xn + an−1 xn−1 + · · · + a1 x + a0 , ai ∈ K, heiÿt Polynom
über K vom Grad ≤ n. Die Menge aller Polynome über K vom Grad ≤ n bilden einen K-Vektorraum
mit den obigen Verknüpfungen. Aber auch die Menge aller Polynome bildet einen K-Vektorraum.
vi) Eine Funktion
Bemerkung 6.4.
V
Ist
ein
K-Vektorraum,
dann gilt insbesondere
0 a = 0,
für alle
λ ∈ K, a ∈ V .
0
Hierbei ist
(−λ) a = −(λ a),
λ0 = 0,
das neutrale Element von
λv = 0 ⇔ λ = 0
Denition 6.5
.
(Teilraum)
oder Untervektorraum von
Satz 6.6
ii)
falls
.
V,
ein
U
Weiterhin ist
v = 0.
oder
K-Vektorraum. Eine nicht-leere Teilmenge U ⊆ V heiÿt
K-Vektorraum im Sinne der Denition 6.1 ist.
Teilraum
U ⊆ V
U
selbst ein
V
Sei
(Unterraumkriterium)
genau dann ein Teilraum von
i)
V
Sei
V,
K.
ein
K-Vektorraum
und
eine nicht-leere Teilmenge.
ist
wenn gilt
0 ∈ U,
λv + w ∈ U
für alle
v, w ∈ U
und
λ ∈ K.
Beispiel 6.7.
i)
{0}
und
V
sind triviale Teilräume eines Vektorraums
ii) Jede Gerade im
R2 ,
V.
die den Nullpunkt enthält, ist ein Teilraum des
R2 .
Geraden, die nicht den Null-
punkt enthalten, sind keine Teilräume.
Satz 6.8.
A ∈ Km×n . Die
U = {x ∈ K : A x = 0} ist ein
Sei
n
Bemerkung 6.9.
Lösungsmenge des homogenen Gleichungssystems
Kn .
A x = 0,
d.h. die Menge
Teilraum von
a = (a1 , . . . , an )| ∈ Rn \ {0}, α ∈ R, heiÿt H(a, α) = {(x1 , . . . , xn )| ∈ Rn :
a1 x1 + a2 x2 + · · · + an xn = α} Hyperebene . Die 0 enthaltenen Hyperebenen, d.h. H(a, 0), sind Teilräume,
und für α 6= 0 ist H(a, α) kein Teilraum.
Denition 6.10
Für
.
(Summe von Teilräumen)
Unter der Summe von
U
und
U
0
V ein K-Vektorraum,
U + U 0 , versteht man die
Sei
, geschrieben
und seien
U, U 0
Teilräume von
V.
Menge
U + U 0 = {u + u0 : u ∈ U, u0 ∈ U 0 }.
Lemma 6.11.
und
U +U
0
Sei
V
Teilräume
Denition 6.12
ein
K-Vektorraum,
von V .
.
(Linearkombination)
der Form
m
X
und seien
Sei
V
ein
U, U 0 ⊆ V
Teilräume von
K-Vektorraum,
und seien
V.
Dann sind auch
v1 , . . . , vm ∈ V .
U ∩ U0
Ein Ausdruck
λi vi = λ1 v1 + λ2 v2 + · · · + λm vm
i=1
heiÿt Linearkombination von
Denition 6.13
V.
v1 , . . . , vm .
.
(Lineare Hülle)
Sei
V
ein
K-Vektorraum,
und sei
M ⊆V
eine nicht-leere Teilmenge von
Dann heiÿt
lin M =
(m
X
)
λi vi : m ∈ N, λi ∈ K, vi ∈ M, 1 ≤ i ≤ m
i=1
die lineare Hülle von
aus
M . In Worten: lin M
ist die Menge aller endlichen Linearkombinationen von Elementen
M.
36
Lemma 6.14.
Teilraum von
Sei
V
ein
K-Vektorraum,
und sei
M ⊆V
eine nicht-leere Teilmenge von
V.
Dann ist
lin M
V.
Bemerkung 6.15.
Sei
V
ein
K-Vektorraum,
lin {v1 , . . . , vk } =
und seien
( k
X
v1 , . . . , vk ∈ V .
Dann ist
)
λi vi : λi ∈ K, 1 ≤ i ≤ k
.
i=1
Beispiel 6.16.
i)
ii)
iii)
, 01 } = R2 .
2 2 1
, 1 , −3 } = R2 .
lin { −1
−3
1
, 3 } = {(x1 , x2 )| ∈ R2 : x1 = −x2 }.
lin { −1
lin {
1
0
Denition 6.17
heiÿt
M
(Erzeugendensystem)
ein Erzeugendensystem von
.
Sei
V
ein
K-Vektorraum
und
M ⊆ V , M 6= ∅.
Ist
lin M = V ,
dann
V.
Man vereinbart, dass die leere Menge ein Erzeugendensystem des trivialen Vektorraumes
{0}
ist.
Beispiel 6.18.
i)
ii)
iii)
1
0
, 01 ist ein Erzeugendensystem von R2 .
2 2 1
2
−1 , 1 , −3 ist ein Erzeugendensystem von R .
−3
1
2
ist kein Erzeugendensystem von R .
−1 , 3
Denition 6.19
v1 , . . . , vm
(Linear (un)abhängig)
.
Sei
V
ein
K-Vektorraum,
und seien
v1 , . . . , vm ∈ V .
Die Vektoren
heiÿen linear unabhängig, wenn aus
m
X
λi vi = 0,
(6.1)
i=1
mit
λi ∈ K,
stets folgt
λ1 = λ2 = · · · = λm = 0.
Sind die Vektoren nicht linear unabhängig, dann heiÿen sie linear abhängig.
Bemerkung 6.20.
i)
ii)
v1 , . . . , vm sind also genau dann linear unabhängig, wenn die einzige Möglichkeit den Nullvektor 0 als
Linearkombination der Vektoren v1 , . . . , vm zu schreiben, die triviale ist, d.h. alle Skalare sind 0.
v1 , . . . , vm
sind also genau dann linear abhängig, wenn es Skalare
λ1 , . . . , λ m
gibt, die nicht alle
0
sind,
so dass (6.1) erfüllt ist.
Beispiel 6.21.
i)
ii)
iii)
iv)
1
0
, 01 ∈ R2 sind linear unabhängig.
2 2 1
−1 , 1 , −3 sind linear abhängig.
−3
1
sind linear abhängig.
−1 , 3
0
ist linear abhängig.
Lemma 6.22.
Sei
V
ein
K-Vektorraum
und seien
v1 , . . . , vm ∈ V .
äquivalent:
37
Dann sind die folgenden Aussagen
i)
v1 , . . . , vm
sind linear abhängig.
vj ∈ {v1 , . . . , vm },
ii) Es gibt ein
das sich als Linearkombination der übrigen Vektoren darstellen lässt,
d.h.
vj ∈ lin {v1 , . . . , vj−1 , vj+1 , . . . , vm }.
Denition 6.23.
Die Vektoren
ei ∈ Kn mit
1
0
e1 = 0 ,
..
.
0
In ,
d.h. die Spalten der Einheitsmatrix
Bemerkung 6.24.
densystem von
n
K
Denition 6.25
0
0
1
0
e2 = 0 , . . . , en = ... ,
..
.
0
0
1
heiÿen Einheitsvektoren.
e1 , . . . , en ∈ Kn
lin {e1 , . . . , en } = Kn .
Die Einheitsvektoren
, d.h.
.
(Basis)
sind linear unabhängig und bilden ein Erzeugen-
Ein minimales Erzeugendensystem
M
eines
K-Vektorraums
heiÿt Basis. Ein Vek-
torraum heiÿt endlich erzeugt, wenn er ein endliches Erzeugendensystem hat.
Folgerung 6.26.
Ein endlich erzeugter Vektorraum hat eine Basis.
Satz 6.27.
ein
Sei
V
K-Vektorraum, B ⊆ V .
Dann sind die folgenden Aussagen äquivalent:
i)
B
ist ein minimales Erzeugendensystem (also eine Basis).
ii)
B
ist eine maximal linear unabhängige Menge.
iii)
B
ist ein linear unabhängiges Erzeugendensystem.
iv) Jeder Vektor
v∈V
hat genau eine Darstellung
P
v∈B
λv · v ,
wobei nur endlich viele der
λv
ungleich
0
sind.
Satz 6.28.
Jeder Vektorraum hat eine Basis.
Bemerkung 6.29.
Die Aussage von Satz 6.28 ist klar für endlich erzeugte Vektorräume. Sie ist aber auch
richtig für so exotische Vektorräume wie
R,
betrachtet als
Q-Vektorraum.
Für diesen Vektorraum hat noch
kein Mensch je eine Basis gesehen!
Satz 6.30.
Je zwei Basen eines Vektorraumes sind gleichmächtig.
Denition 6.31
M
.
(Dimension)
die Dimension von
V
Sei
V
dimK (V ) endlich, dann heiÿt
Vektorraum.
Ist
V
K-Vektorraum mit Basis M ⊆ V . Dann heiÿt
dimK (V ) (oder einfach dim(V )) bezeichnet.
ein
und wird mit
die Mächtigkeit von
endlichdimensionaler Vektorraum; ansonsten unendlichdimensionaler
Beispiel 6.32.
i)
ii)
iii)
dimK (Kn ) = n.
dimK (Km×n ) = m · n.
dimC (C) = 1,
aber betrachtet man
C
als Vektorraum über
R,
dann ist
dimR (C) = 2.
iv) Der Vektorraum aller Polynome über einem Körper ist nicht endlichdimensional.
38
Satz 6.33.
Sei
V
ein
K-Vektorraum mit dimK (V ) = n. Dann ist jede Menge von n linear unabhängigen
V , und jede Basis besteht aus genau n Vektoren. Desweiteren kann jede Menge von
Vektoren eine Basis von
linear unabhängigen Vektoren zu einer Basis ergänzt werden.
Bemerkung 6.34.
Da jeder Teilraum
U
eines
K-Vektorraumes V
selbst ein Vektorraum ist, sind auch für
Teilräume Begrie wie Basis, Dimension etc. deniert.
Insbesondere ist
dimK {0} = 0.
Beispiel 6.35.
i) Die den Nullpunkt enthaltenen Geraden im
ii) Die Ebenen im
Bemerkung 6.36.
also
R3 ,
R2
oder
Seien
Für
U, U 0
haben die Dimension
die den Nullpunkt enthalten, haben Dimension
a = (a1 , . . . , an )| ∈ Rn \ {0}
dimR (H(a, 0)) = n − 1 (siehe Bemerkung 6.9).
Satz 6.37.
R3
Teilräume eines
1.
2.
ist die Dimension der Hyperebne
K-Vektorraumes V .
Dann gilt
dimK (U + U 0 ) = dimK (U ) + dimK (U 0 ) − dimK (U ∩ U 0 ).
39
H(a, 0)
gleich
n − 1,
7 Lineare Abbildungen und Matrizen
Denition 7.1
(Lineare Abbildung)
.
Seien
V, W
zwei
K-Vektorräume.
Eine Abbildung
f :V →W
heiÿt
lineare Abbildung, wenn gilt:
i)
ii)
f (x + y) = f (x) + f (y)
für alle
f (λ x) = λ f (x)
x∈V
Bemerkung 7.2.
für alle
x, y ∈ V ,
und
λ ∈ K.
Insbesondere gilt für eine lineare Abbildung
f (0) = 0.
Beispiel 7.3.
i)
f : R2 → R2
mit
f (x) = −x
ii)
f : R2 → R2
mit
f ((x1 , x2 )| ) = (x2 , x1 )|
ist eine lineare Abbildung (Spiegelung am Ursprung) .
ist eine lineare Abbildung (Spiegelung an der 45 Grad-Achse).
iii)
f : R3 → R2 mit f ((x1 , x2 , x3 )| ) = (x1 , x2 )|
die (x1 , x2 )-Ebene) .
iv)
f : R2 → R3
mit
f ((x1 , x2 )| ) = (x1 , x2 , 0)|
a ∈ R2 , a 6= 0.
(Translation um a).
v) Sei
Bemerkung 7.4.
v1 , . . . , vm ∈ V
Die Abbildung
ist eine lineare Abbildung (Orthogonale Projektion auf
ist eine lineare Abbildung (Einbettung des
T a : R2 → R2
V, W zwei K-Vektorräume, und sei f : V → W
λ1 , . . . , λm ∈ K, m ∈ N. Dann gilt
!
m
m
X
X
f
λi f (vi ).
λi vi =
Eine Abbildung
f : Kn → Km
a1 , . . . , an ∈ Km
der Matrix
für alle
sind die Bilder der Einheitsvektoren
Beispiel 7.6.
f : R2 → R2
mit
f (x) = −x:
A=
ii)
f : R2 → R2
mit
−1
0
0
.
−1
1
.
0
f ((x1 , x2 )| ) = (x2 , x1 )| :
A=
iii)
f : R3 → R2
mit
eine lineare Abbildung. Seien
0
1
f ((x1 , x2 , x3 )| ) = (x1 , x2 )| :
A=
1
0
40
0
1
A ∈ Km×n
gibt mit
x ∈ Kn .
ai = f (ei ), 1 ≤ i ≤ n.
i)
R3 ).
ist keine lineare Abbildung
ist genau dann linear, wenn es eine Matrix
A
im
i=1
f (x) = A x
Die Spalten
Ta (x) = x + a
Seien
und
i=1
Satz 7.5.
mit
R2
0
.
0
e1 , . . . , en ∈ Kn ,
d.h.
iv)
f : R2 → R3
mit
f ((x1 , x2 )| ) = (x1 , x2 , 0)| :
0
1 .
0
1
A = 0
0
v)
f : R2 → R4
mit
f ((x1 , x2 )| ) = (2 x1 − 3 x2 , x2 , x1 − x2 , −5 x1 )| :
2 −3
0
1
A=
1 −1 .
−5 0
Satz 7.7. Seien V, W zwei K-Vektorräume, und sei {v1 , . . . , vn } eine Basis von
Dann gibt es eine eindeutig bestimmte lineare Abbildung f : V → W mit
f (vi ) = wi ,
V.
Seien
w1 , . . . , wn ∈ W .
1 ≤ i ≤ n.
Also: Lineare Abbildungen sind eindeutig durch die Bilder einer Basis festgelegt.
Denition 7.8
(Ane Abbildung)
f (x) = A x + a
x∈K
Denition 7.9
θ
für alle
n
.
Sei
A ∈ Km×n
Denition 7.10
.
Sei
a ∈ Rn .
Die Drehung im
f = Tv ◦ rotθ ◦ T−v ,
d.h.
R2
um den Punkt
f (x) = v +
A∈K
B∈K
f : Kn → Km
r×m
Die Abbildung
den Ursprung (0) mit Winkel
T a : Rn → Rn
mit
Ta (x) = x + a
heiÿt
a.
Bemerkung 7.11.
Seien
mit
heiÿt ane Abbildung.
(Translationen)
Satz 7.12.
f : Kn → Km
Die Abbildung
R2 ). Unter der Drehung (Rotation) im R2 um
2
2
Abbildung rotθ : R → R mit
x1
x1
cos θ − sin θ
.
=
rotθ
sin θ
cos θ
x2
x2
Translation (Verschiebung) um
,
a ∈ Km .
(Drehung im
versteht man die
m×n
und
cos θ
sin θ
v
mit Winkel
− sin θ
cos θ
θ
ist gegeben durch die Abbildung
· (x − v).
g : Km → Kr lineare Abbildungen mit f (x) = A x
g ◦ f : Kn → Kr wieder eine lineare Abbildung mit
und
. Dann ist
und
g(y) = B y
mit
(g ◦ f )(x) = (B A) x.
Satz 7.13.
ist. Die zugehörige
Denition 7.14
lin {e2 }
i)
oder
f : Kn → Kn mit f (x) = A x ist bijektiv genau dann, wenn A
−1
Umkehrabbildung f
: Kn → Kn ist dann gegeben durch f −1 (y) = A−1 y.
Eine lineare Abbildung
(Rotation(en) im
lin {e1 }
mit Winkel
x3 -Achse; rote3 ,θ : R3 → R3
θ
R3 ).
Unter der Rotation im
x2 -Achse; rote2 ,θ : R3 → R3
um die Koordinaten-Achsen
versteht man die Abbildung(en)
mit
0
− sin θ
cos θ
0
0
0
1
0
cos θ
rote3 ,θ (x) = @ sin θ
0
ii)
R3
1 0 1
0
x1
0 A · @x2 A ,
1
x3
mit
cos θ
0
rote2 ,θ (x) = @
sin θ
41
1 0 1
− sin θ
x1
0 A · @x2 A ,
cos θ
x3
regulär
lin {e3 },
iii)
x1 -Achse; rote1 ,θ : R3 → R3
mit
0
1
rote1 ,θ (x) = @ 0
0
Denition 7.15
(Isomorphe Vektorräume)
es eine bijektive lineare Abbildung
Satz 7.16.
.
Zwei
f :V →W
Je zwei endlich dimensionale
0
cos θ
sin θ
1 0 1
x1
0
− sin θ A · @x2 A .
cos θ
x3
K-Vektorräume V, W
heiÿen isomorph zueinander, falls
gibt.
K-Vektorräume
der gleichen Dimension
n
sind zueinander iso-
morph.
Denition 7.17.
Sei
f :V →W
eine lineare Abbildung zwischen zwei
K-Vektorräumen V, W .
Die Menge
Kern(f ) = {v ∈ V : f (v) = 0} ⊆ V
heiÿt Kern der Abbildung
f,
und die Menge
Bild(f ) = f (V ) ⊆ W
heiÿt Bild der Abbildung
f.
Bemerkung 7.18. Kern(f )
Satz 7.19.
ist Teilraum von
V
und
Bild(f )
ist Teilraum von
Eine lineare Abbildung ist genau dann injektiv, wenn
Satz 7.20 (Dimensionsformel).
und sei
V,
Sei
f :V →W
W.
Kern(f ) = {0}.
eine lineare Abbildung zwischen zwei
K-Vektorräumen V, W ,
endlich-dimensional. Dann gilt:
dim V = dim Bild(f ) + dim Kern(f ).
Denition 7.21
Spalten in
A
Satz 7.22.
.
(Rang einer Matrix)
heiÿt Rang der Matrix, und
Sei
A ∈ Km×n .
Dann gilt
A ∈ Km×n . Die maximale
wird mit rg(A) bezeichnet.
Sei
rg(A) = rg(A| ),
Anzahl von linear unabhängigen
d.h. die maximale Anzahl linear unabhängiger Spalten
einer Matrix ist gleich der maximalen Anzahl linear unabhängiger Zeilen.
Satz 7.23.
Sei
f : Kn → Km
mit
f (x) = A x, A ∈ Km×n .
Dann ist
rg(A) = dimK Bild(f ),
und es ist
Kern(f ) = {x ∈ Kn : A x = 0}.
Satz 7.24.
Sei
A ∈ Km×n ,
und sei
L = {x ∈ Kn : A x = 0}.
Dann ist
dimK L = n − rg(A).
Denition 7.25
i)
ii)
iii)
hx, xi > 0
. Sei V ein K-Vektorraum mit K ⊆ C.
x, y, v ∈ V und λ, µ ∈ K gilt
(Skalarprodukt)
heiÿt Skalarprodukt, falls für alle
falls
hx, yi = hy, xi
x 6= 0
Eine Abbildung
(Positivität),
(Symmetrie),
hλ x + µ y, vi = λ hx, vi + µ hy, vi
(Linearität im ersten Argument).
Denition 7.26.
42
h·, ·i : V × V → K
i) Unter dem Standardskalarprodukt im
Rn
versteht man
hx, yi = x| y =
n
X
xi yi ,
i=1
für
x = (x1 , . . . , xn )| , y = (y1 , . . . , yn )| ∈ Rn .
ii) Unter dem Standardskalarprodukt im
Cn
versteht man
hx, yi = x| y =
n
X
xi yi ,
i=1
für
x = (x1 , . . . , xn )| , y = (y1 , . . . , yn )| ∈ Cn .
Bemerkung 7.27.
Im
Rn
ist das Skalarprodukt auch linear im zweiten Argument, d.h. es gilt
hx, λ y + µ vi = λ hx, yi + µ hx, vi,
für alle
x, y, v ∈ Rn , λ, µ ∈ R.
hx, λ y + µ vi = λ hx, yi + µ hx, vi,
für alle
x, y, v ∈ Cn , λ, µ ∈ C.
Cn
Hingegen gilt im
Denition 7.28
.
(Norm)
Satz 7.29.
Für
V ein K-Vektorraum, K = R oder K = C,
v ∈ V ist deniert als
p
kvk = hv, vi.
Sei
oder die Norm eines Vektors
v, w ∈ Rn
mit Skalarprodukt
h·, ·i.
Die Länge
gilt
hv, wi = kvk kwk cos φ,
wobei
φ ∈ [0, π]
Korollar 7.30
Skalarprodukt
der von
v
und
w
eingeschlossene Winkel ist.
18 -Schwarz19 -Ungleichung). Sei
(Cauchy
h·, ·i
und zugehöriger Norm
k · k.
V
ein
K-Vektorraum, K = R
oder
K = C,
mit
Dann gilt
|hx, yi| ≤ kxk kyk
mit Gleichheit dann und nur dann, wenn
Bemerkung 7.31.
x
und
y
liner abhängig sind.
x1 , . . . , xn , y1 , . . . , yn ∈ R:
q
q
|x1 y1 + · · · + xn yn | ≤ x21 + · · · + x2n y12 + · · · + yn2
Insbesondere gilt für
mit Gleichheit dann und nur dann, wenn die Vektoren
Bemerkung 7.32.
Norm
i)
ii)
iii)
k · k.
Sei
V
ein
K-Vektorraum, K = R
(x1 , . . . , xn )| , (y1 , . . . , yn )| ∈ Rn
oder
K = C,
mit Skalarprodukt
Dann gilt
kxk ≥ 0
für alle
kλ xk = |λ| kxk
x∈V,
für alle
kx + yk ≤ kxk + kyk
wobei Gleichheit dann und nur dann gilt, wenn
x ∈ V , λ ∈ K.
für alle
x, y ∈ V
(Dreiecksungleichung).
18 Augustin Louis Cauchy, 17891857
19 Hermann Amandus Schwarz, 18431921
43
x = 0.
linear abhängig sind.
h·, ·i
und zugehöriger
Denition 7.33
i) Jedes
(Polarkoordinaten)
x = (x1 , x2 )| ∈ R2 \ {0}
.
lässt sich eindeutig darstellen als
cos φ
x = kxk
sin φ
mit
cos φ = x1 /kxk
ii) Jedes
und
sin φ = x2 /kxk.
x = (x1 , x2 , x3 )| ∈ R3 \ {0}
lässt sich eindeutig darstellen als
sin ψ cos φ
x = kxk sin ψ sin φ
cos ψ
mit
p
cos φ = x1 /
p
x21 + x22 , sin φ = x2 /
x21 + x22 ,
und
cos ψ = x3 /kxk
und
ψ ∈ [0, π].
Diese Darstellungen eines Vektors nennt man Darstellung in Polarkoordinaten.
Beispiel 7.34 (Rotation im
R3 ).
Die Rotation um die Achse
{λ v : λ ∈ R} mit Winkel θ lässt sich durch die folgenden Rotationen beschreiben:
Sei
v ∈ R3 \ {0} mit
sin ψ cos φ
v = sin ψ sin φ .
cos ψ
i) Man drehe die Rotationsachse so, dass sie mit der
ii) Man wende die Rotation mit Winkel
θ
um die
x3 -Koordinaten-Achse
x3 -Achse
übereinstimmt,
an,
iii) Man drehe die Rotationsachse wieder zurück in die Ausgangsposition.
Man erhält so die Abbildung:
(rote3 ,φ ◦ rote2 ,−ψ ) ◦ rote3 ,θ ◦ (rote2 ,ψ ◦ rote3 ,−φ ) .
Denition 7.35
h·, ·i.
Bemerkung 7.36.
u 6= 0.
.
(Orthogonale Vektoren)
Zwei Vektoren
v, w ∈ V
Sei
V
Sei
V
ein
K-Vektorraum, K = R
hv, wi = 0.
oder
K = C,
mit Skalarprodukt
heiÿen orthogonal, wenn
ein
K-Vektorraum, K = R
oder
K = C,
mit Skalarprodukt
h·, ·i,
und sei
u ∈ V,
Dann ist
U = {w ∈ V : hu, wi = 0}
Teilraum von
V.
Denition 7.37 (Orthogonale Projektion).
h·, ·i,
und sei
u ∈ V , u 6= 0.
versteht man die Abbildung
Sei
V
ein
K-Vektorraum, K = R oder K = C, mit Skalarprodukt
U = {w ∈ V : hu, wi = 0}
Unter der orthogonalen Projektion auf den Teilraum
f :V →U
mit
f (v) = v −
Bemerkung 7.38.
hv, ui
u.
kuk2
Orthogonale Projektionen sind lineare Abbildungen mit Matrix
In −
1
u u| .
kuk2
44
Bemerkung 7.39.
Sei
V = Rn , a ∈ V , a 6= 0,
α ∈ R.
und sei
Der Abstand zwischen der Hyperebene
H(a, α) = {x ∈ Rn : ha, xi = α}
v∈V
und einem Punkt
ist gleich
|ha, vi − α|
.
kak
Denition 7.40
h·, ·i.
produkt
(Orthonormal-system, -basis)
Die Vektoren
u1 , . . . , un ∈ V
.
hui , uj i = δi,j ,
δi,j
heiÿt Kronecker-Symbol. Bilden
malbasis von
Sei
V
ein
K-Vektorraum, K = R
u1 , . . . , un
δi,j
mit
K = C,
1 ≤ i, j ≤ n
oder
bilden ein Orthonormalsystem, falls für
mit Skalar-
(
0, i 6= j,
=
1, i = j.
zudem eine Basis von
V,
dann heiÿt diese Basis Orthonor-
V.
Bemerkung 7.41.
i) Vektoren in einem Orthonormalsystem sind linear unabhängig.
ii)
e1 , . . . , en
Satz 7.42
h·, ·i,
sind eine Orthonormalbasis in
20 -Schmidt21 -Verfahren). Sei
(Gram
und seien
a1 , . . . , a m ∈ V
Rn ,
V
Cn .
bzw.
ein
K-Vektorraum, K = R
k = 1, . . . , m sei
oder
K = C,
mit Skalarprodukt
linear unabhängig. Für
uk = ak −
k−1
X
j=1
huj , ak i
uj .
kuj k2
u
u
Dann bilden die Vektoren ku1 k , . . . , kum k ein Orthonormalsystem, und es gilt für
1
m
lin
uk
u1
,...,
ku1 k
kuk k
1≤k≤m
= lin {u1 , . . . , uk }
= lin {a1 , . . . , ak }.
Denition 7.43
falls
|
U =U
−1
.
(Orthogonale Matrix/Transformation)
Eine Matrix
U ∈ Rn×n
heiÿt orthogonale Matrix,
, d.h
U | U = U U | = In .
Die zugehörige lineare Abbildung
Satz 7.44.
Sei
U ∈ Rn×n
f :V →V
mit
f (x) = U x
heiÿt orthogonale Transformation.
eine orthogonale Matrix. Dann gilt für alle
v, w ∈ Rn
hU v, U wi = hv, wi.
Satz 7.45.
i)
ii)
U
Sei
U ∈ Rn×n .
Dann sind die folgenden Aussagen äquivalent:
orthogonal,
U|
ist orthogonal,
iii) Die Spalten von
U
(und somit auch die Zeilen) bilden eine Orthonormalbasis des
20 Jorgen Pedersen Gram, 18501916
21 Ehrhart Schmidt, 18761959
45
Rn .
Denition 7.46
.
Rn+1
mit den Koordinaten (x1 , . . . , xn , 1) zugeordnet. Diese Koordinaten heiÿen homogene Koordinaten von x.
|
n+1
Beim Rechnen mit homogenen Koordinaten wird jedem Punkt (x1 , . . . , xn , xn+1 ) ∈ R
, xn+1 6= 0, der
|
n
Punkt (x1 /xn+1 , . . . , xn /xn+1 ) ∈ R zugeordnet.
(Homogene Koordinaten)
|
Jedem Punkt
(−1, 2)| ∈ R2 entspricht
(−λ, 2λ, λ)| ∈ R3 , λ 6= 0.
Beispiel 7.47. Der Punkt
bzw. den Punkten
x = (x1 , . . . , xn )| ∈ Rn
wird der Punkt im
in homogenen Koordinaten dem Punkt
(−1, 2, 1)| ∈ R3 ,
Bemerkung 7.48.
i) Sei
a = (a1 , a2 )| ∈ R2 .
Koordinaten darstellen als
ii) Die Rotation
darstellen als
Ta : R2 → R2 um a mit Ta (x) = x + a
0 t1
x1
x1 + t1
1 t2 · x2 = x2 + t2 .
0 1
1
1
Die Translation
1
0
0
lässt sich in homogenen
rotθ : R2 → R2 um den Ursprung mit Winkel θ lässt sich in homogenen
cos θ − sin θ 0
x1
cos θ x1 − sin θ x2
sin θ
cos θ 0 · x2 = sin θ x1 + cos θ x2 .
0
0
1
1
1
iii) Die Rotation um den Punkt
v = (v1 , v2 )|
mit Winkel
θ
Koordinaten
lässt sich in homogenen Koordinaten darstellen
als
1 0 v1
cos θ − sin θ 0
1 0 −v1
x1
0 1 v2 sin θ
cos θ 0 0 1 −v2 · x2
1
0 0 1
0
0
1
0 0
1
cos θ − sin θ − cos θ v1 + sin θ v2 + v1
x1
cos θ − sin θ v1 − cos θ v2 + v2 · x2 .
= sin θ
1
0
0
1
iv) Sei
a = (a1 , a2 , a3 )| ∈ R3 .
Die Translation
T a : R3 → R3
um
a
mit
Ta (x) = x + a
lässt sich in
homogenen Koordinaten darstellen als
1
0
0
0
v) Die Rotation um die
0
1
0
0
0
0
1
0
x3 -Achse mit Winkel
cos θ − sin θ 0
sin θ
cos θ 0
0
0
1
0
0
0
a1
x1
x1 + a1
a2
· x2 = x2 + a2 .
a3 x3 x3 + a3
1
1
1
θ
lässt sich mittels homogenen Koordinaten darstellen als
0
x1
cos θ x1 − sin θ x2
0
· x2 = sin θ x1 + cos θ x2 .
0 x3
x3
1
1
1
Entsprechend lassen sich die Rotationen um die
x1 -
oder
x2 -Achse
darstellen. Mittels Verknüpfungen
von Rotationen und Translationen lassen sich somit Rotationen um beliebige Achsen durch Matrixmultiplikationen ausdrücken.
46
8 Determinanten und Eigenwerte
Notation 8.1.
Für eine
(n − 1) × (n − 1)
Denition 8.2
von
A,
(Determinante, Entwicklungssatz von Laplace
bezeichnet mit
i) Ist
n = 1,
die
det(A),
ist eine Zahl aus
K,
22 ). Sei
A = (ai j ) ∈ Kn×n .
Die Determinante
die wie folgt rekursiv deniert ist:
det(A) = a1 1 .
so ist
n>1
ii) Für
n × n-Matrix A ∈ Kn×n und i, j ∈ {1, . . . , n} bezeichnet Ai j ∈ K(n−1)×(n−1)
A durch Streichen der i-ten Zeile und j -ten Spalte entsteht.
Matrix, die aus
und einen Zeilenindex
det(A) =
n
X
i ∈ {1, . . . , n}
ist
(−1)i+j · ai j · det(Ai j )
j=1
= (−1)i+1 ai 1 det(Ai 1 ) + (−1)i+2 ai 2 det(Ai 2 ) + · · · + (−1)i+n ai n det(Ai n ).
(Entwicklung nach der
i-ten
Zeile)
Beispiel 8.3.
A=
i) Für
a1 1
a2 1
a1 2
a2 2
ist
det(A) = a1 1 a2 2 − a1 2 a2 1 .
Dies entspricht dem (orientierten) Flächeninhalt des von den Spaltenvektoren aufgespannten Parallelogramms.
ii) Sei
2
A = 4
7
1
0
6
3
5 .
8
Entwicklung nach der
2-ten
Zeile (also
i = 2)
ergibt
det(A) = (−1)2+1 4 det(A2 1 ) + (−1)2+2 0 det(A2 2 ) + (−1)2+3 5 det(A2 3 )
„„
««
„„
««
1 3
2 1
= −4 det
− 5 det
6 8
7 6
= −4 (8 − 18) − 5 (12 − 7) = 40 − 25 = 15.
Satz 8.4.
j -ten
Für
A ∈ Kn×n
Spalte berechnet
det(A) = det(A| ). Insbesondere
werden, d.h. für j ∈ {1, . . . , n} ist
ist
det(A) =
n
X
kann
det(A)
auch durch Entwicklung nach der
(−1)i+j ai j det(Ai j ).
i=1
Beispiel 8.5. Sei
0
A = 1
2
1
2
5
3
5 .
13
Entwicklung nach der
1-ten
Spalte (also
j = 1)
ergibt
det(A) = (−1)1+1 0 det(A1 1 ) + (−1)2+1 1 det(A2 1 ) + (−1)3+1 2 det(A3 1 )
„„
««
„„
««
1 3
1 3
= −1 det
+ 2 det
5 13
2 5
= − (13 − 15) + 2 (5 − 6) = 0.
Satz 8.6
(Eigenschaften der Determinante)
.
22 Pierre-Simon Laplace, 1749-1827
47
i) Die Determinante einer (oberen oder unteren) Dreiecksmatrix ist gleich dem Produkt ihrer Diagonal-
elemente. Insbesondere ist
det(In ) = 1.
ii) Die Determinante ist alternierend, d.h. bei Vertauschen zweier Zeilen ändert sich das Vorzeichen der
Determinante.
iii) Die Determinante ist linear in jeder Zeile, d.h. seien
λ ∈ K.
weiterer Zeilenvektor,
a1 , . . . , an ∈ Kn
Zeilenvektoren und sei
v
ein
Dann ist
a1
a1
a1
..
..
..
.
.
.
v
a
a
+
v
+
det
=
det
det
i
i
.
.
.
..
..
..
an
an
an
und
a1
..
.
det
λ a i = λ
.
..
an
Bemerkung 8.7.
Wegen
det(A) = det(A| )
a1
..
.
ai .
.
..
an
gelten die Eigenschaften ii) und iii) aus Satz 8.6 auch, wenn
man Zeile durch Spalte ersetzt.
Korollar 8.8.
Sei
A ∈ Kn×n
und
λ ∈ K.
i) Enthält
A
eine Zeile (Spalte) mit lauter Nullen, dann ist
ii) Enthält
A
zwei gleiche Zeilen (Spalten), dann ist
iii) Addition des
λ-fachen
det(A) = 0.
det(A) = 0.
einer Zeile (Spalte) zu einer anderen Zeile (Spalte) ändert die Determinante
nicht.
iv) Sind die Zeilen (Spalten) von
v)
A
linear abhängig, dann ist
det(A) = 0.
det(λ A) = λn det(A).
Bemerkung 8.9.
Aufgrund von Satz 8.6 i),ii) und Korollar 8.8 iii) lässt sich die Determinante auch be-
rechnen, indem man die Matrix mit dem Gauÿ-Algorithmus auf Dreiecksform (Zeilenstufenform) bringt.
Beispiel 8.10. Sei
2
A = 4
7
1
0
6
3
5 .
8
1
0
6
2
4
7
Also
2
3
5 → 0
8
0
1
−2
5
2
3
2
−1 → 0
− 25
0
det(A) = 2 · (−2) · (−15/4) = 15.
48
1
−2
0
3
−1
− 15
4
Satz 8.11.
i)
A
Für
A ∈ Kn×n
sind die folgenden Aussagen äquivalent:
ist regulär (invertierbar).
ii) Die Zeilen (Spalten) von
iii)
rg(A) = n.
iv)
det(A) 6= 0.
Satz 8.12.
A
A, B ∈ Kn×n .
Seien
sind linear unabhängig.
det(A · B) = det(A) · det(B).
Dann ist
Korollar 8.13.
det(A−1 ) =
i) Sei
A ∈ Kn×n
regulär. Dann ist
ii) Sei
U ∈ Kn×n
orthogonal. Dann ist
Bemerkung 8.14.
Denition 8.15
Seien
A, B ∈ Kn×n .
| det(U )| = 1.
Im Allgemeinen ist
.
(Eigenwert, Eigenvektor)
n
n
A:K →K
linearen Abbildung
1
det(A) .
), wenn es
det(A + B) 6= det(A) + det(B).
A ∈ Kn×n . λ ∈ K heiÿt Eigenwert der
n
einen Vektor u ∈ K , u 6= 0, gibt, so dass
Sei
Matrix
A
(bzw. der
A u = λ u.
u
heiÿt Eigenvektor zum Eigenwert
Beispiel 8.16. Sei
A=
0
1
1
0
(Spiegelung an der 45-Grad Achse).
Die Eigenvektoren zum Eigenwert
Eigenwert
−1
λ.
1
sind alle Vektoren der Form
sind alle Vektoren der Form
Bemerkung 8.17.
Sei
A ∈ Kn×n . λ ∈ K
1
und
−1
sind die Eigenwerte von
(α, α)| , α 6= 0.
A.
Die Eigenvektoren zum
(−α, α)| , α 6= 0.
ist Eigenwert von
A
genau dann, wenn es
u 6= 0 ∈ Kn
gibt mit
(A − λ In ) u = 0,
A − λ In
d.h. falls die Spaltenvektoren von
linear abhängig sind, was wiederum äquivalent dazu ist, dass
det(A − λ In ) = 0.
Denition 8.18
.
(Charakteristisches Polynom)
Sei
A ∈ Kn×n .
Dann ist
χA (λ) = det(A − λ In )
ein Polynom vom Grad
χA (λ)
n
in
λ. Es
A.
heiÿt das charakteristische Polynom von
A.
sind die Eigenwerte von
Beispiel 8.19.
i) Sei
A=
0
1
1
0
. Dann ist
χA (λ) = det(A − λ I2 ) = det
−λ
1
1
−λ
= λ2 − 1 = (λ + 1)(λ − 1).
Die Eigenwerte von
ii) Sei
A = In .
A
sind
1
und
−1.
Dann ist
χA (λ) = det(In − λ In ) = (1 − λ)n .
Eigenwert von
In
ist nur
1.
49
Die Nullstellen
λ∈K
von
Satz 8.20.
Sei
A = (ai j ) ∈ Kn×n
und sei
χA (λ) = det(A − λ In ) = an λn + an−1 λn−1 + · · · + a1 λ + a0 ,
mit
ai ∈ K.
Dann ist
Denition 8.21
Matrix
A
an = (−1)n , a0 = det(A)
.
(Spur)
und wird mit
Sei
tr(A)
und
A = (ai j ) ∈ Kn×n .
an−1 = (−1)n−1 (a1 1 + a2 2 + · · · + an n ).
Die Summe der Diagonalelemente von
A
heiÿt Spur der
bezeichnet, d.h.
n
X
tr(A) =
ai i .
i=1
Bemerkung 8.22. A
Bemerkung 8.23.
λ
und
Sei
A|
haben das gleiche charakteristische Polynom.
A ∈ Kn×n ,
und sei
λ∈K
A. u 6= 0
Eigenwert von
ist Eigenvektor zum Eigenwert
genau dann, wenn
(A − λ In ) u = 0.
λ gegeben durch die von Null verschiedenen Lösungen
Kern(A − λ In ) \ {0}
Somit ist die Menge aller Eigenvektoren zum Eigenwert
des homogenen Gleichungssystems
(A − λ In ) x = 0,
was wiederum gleich der Menge
ist.
Denition 8.24
(Eigenraum)
.
Sei
A ∈ Kn×n , und sei λ ∈ K Eigenwert von A. Kern(A − λ In ), d.h.
λ (plus den Nullvektor), heiÿt Eigenraum zum Eigenwert λ.
die
Menge aller Eigenvektoren zum Eigenwert
Bemerkung 8.25
(Bestimmen der Eigenwerte und Eigenräume/-vektoren)
i) Berechne das charakteristische Polynom
iii) Für
λ1 , . . . , λ k
Beispiel 8.26. Sei
A=
0
1
1
0
A ∈ Kn×n .
χA (λ).
Kern(A − λi In ), 1 ≤ i ≤ k .
.
A
hat die beiden Eigenwerte
• λ1 = 1.
von
bestimme man die Eigenräume, d.h.
Sei
χA (λ).
λ1 , . . . , λ k ∈ K
ii) Bestimme alle Nullstellen
.
In diesem Fall ist
A − λ1 I2 =
λ1 = 1
und
λ2 = −1.
−1
1
1
−1
, und
Kern(A − λ1 I2 ) =
2
x∈R :
−1
1
1
−1
x=0
= {(α, α)| : α ∈ R}.
• λ2 = −1.
In diesem Fall ist
A − λ2 I2 =
1
1
1
1
, und
Kern(A − λ2 I2 ) =
x ∈ R2 :
1
1
1
1
x=0
= {(−α, α)| : α ∈ R}.
Denition 8.27
.
A ∈ Kn×n , und sei λ1 ∈ K Eigenwert
ein Teiler von χA (λ) ist.
von A. Sei m ∈ N die gröÿte Potenz, so dass (λ − λ1 )
m heiÿt algebraische Vielfachheit von λ1 , und dimK Kern(A − λ1 In ) heiÿt geometrische Vielfachheit von λ1 .
(Algebraische und Geometrische Vielfachheit)
m
50
Sei
Beispiel 8.28.
i) Sei
A=
0
1
1
0
.
λ1 = 1
und
λ2 = −1
haben jeweils die algebraische und geometrische Vielfachheit
1.
A = In . Der einzige Eigenwert λ1 = 1 hat die geometrische und algebraische Vielfachheit n.
1 1
2
Sei A =
. Dann ist χA (λ) = (1 − λ) , und λ1 = 1 ist der einzige Eigenwert mit algebraischer
0 1
Vielfachheit 2. Die geometrische Vielfachheit ist aber nur 1.
ii) Sei
iii)
Denition 8.29
(Ähnliche Matrizen)
Matrix
gibt mit
C ∈ Kn×n
Satz 8.31.
Zwei Matrizen
A, B ∈ Kn×n
heiÿen ähnlich, falls es eine reguläre
B = C −1 A C.
Bemerkung 8.30.
Dannist für
.
Seien
A, B ∈ Kn×n
ähnliche Matrizen und
m∈N
B = C −1 A C
mit
C ∈ Kn×n
reguläre.
B m = C −1 Am C.
Ähnliche Matrizen haben das gleiche charakteristische Polynom.
Denition 8.32 (Diagonalisierbarkeit).
A ∈ Kn×n (bzw. eine lineare Abbildung A : Kn → Kn )
n×n
−1
heiÿt diagonalisierbar, falls es eine reguläre Matrix C ∈ K
gibt, so dass C
A C eine Diagonalmatrix ist,
d.h. A ist ähnlich zu einer Diagonalmatrix.
Eine Matrix
Satz 8.33.
Eigenvektoren zu verschiedenen Eigenwerten sind linear unabhängig.
Satz 8.34.
Sei
i)
A
A ∈ Kn×n .
Dann sind die folgenden Aussagen äquivalent:
ist diagonalisierbar.
ii) Es gibt eine Basis des
Kn
bestehend aus Eigenvektoren von
iii) Das charakteristische Polynom
für
i 6= j ,
und
mi ∈ N
χA (λ)
zerfällt über
K
A.
in Linearfaktoren, d.h. es gibt
λ1 , . . . , λk , λi 6= λj
mit
χA (λ) = (−1)n (λ − λ1 )m1 · (λ − λ2 )m2 · . . . · (λ − λk )mk ,
mi = dimK Kern(A−λi In ), 1
Vielfachheit für alle Eigenwerte.
und
Bemerkung 8.35.
heiten
m1 . . . , mk .
Sei
A ∈ Kn×n
≤ i ≤ k ,d.h. die algebraische Vielfachheit ist gleich der geometrischen
diagonalisierbar mit Eigenwerten
λ 1 . . . , λk
und algebraischen Vielfach-
Dann ist
mk
m2
1
det(A) = λm
1 · λ2 · . . . · λk ,
tr(A) = m1 λ1 + m2 λ2 + . . . + mk λk .
Bemerkung 8.36.
Eigenwert
λ
von
Sei
U ∈ Kn×n , K = R
oder
K = C,
eine orthogonale Matrix. Dann gilt für jeden
U
|λ| = 1.
Denition 8.37
(Stochastische Matrix, Markov
23 -Matrix). Eine Matrix
sche Matrix oder Markov-Matrix falls
23 Andrej Andrejewitsch Markov, 18561922
51
A = (ai j ) ∈ Rn×n
heiÿt stochasti-
i) alle Einträge nichtnegativ sind, d.h.
ai j ≥ 0, 1 ≤ i, j ≤ n,
und
ii) die Summer der Einträge in jeder Spalte gleich eins ist, d.h.
Satz 8.38.
Sei
A
Pn
eine stochastische Matrix. Alle Eigenwerte von
sie hat immer den Eigenwert
1.
Zum Eigenwert
1
i=1
A
ai j = 1
für
1 ≤ j ≤ n.
sind von Betrag kleiner gleich
1,
und
gibt es immer einen Eigenvektor mit nichtnegativen Kom-
ponenten.
Satz 8.39.
n×n
Jede symmetrische Matrix A ∈ R
ist diagonalisierbar, und es gibt sogar eine Orthonormaln
basis des R bestehend aus Eigenvektoren von A. Insbesondere gibt es eine orthogonale Matrix U , so dass
U | A U eine Diagonalmatrix ist.
Denition 8.40
.
(Positiv (negativ) denit)
Sei
A ∈ Rn×n
symmetrisch.
x| A x > 0
für alle
x ∈ Rn \ {0}.
x| A x < 0
für alle
x ∈ Rn \ {0},
A
heiÿt positiv denit, falls
Ist hingegen
A negativ denit.
> nur ≥ 0, bzw. statt < nur ≤, so heiÿen die Matrizen positiv semi-denit, bzw. negativ semi-denit.
dann heiÿt
Gilt statt
Satz 8.41.
A
Eine symmetrische Matrix
A
ist genau dann positiv (negativ) denit, wenn alle Eigenwerte von
positiv (negativ) sind.
Satz 8.42 (Hurwitz24 -Kriterium).
denit, wenn für
1≤m≤n
Eine symmetrische
n×n-Matrix A = (ai j ) ∈ Rn×n
gilt:
det (ai j )m
i,j=1 > 0.
24 Adolf Hurwitz, 1859-1919
52
ist genau dann positiv
9 Gruppen, Ringe, Körper
Denition 9.1
(Gruppe (vergl. Def. 4.36)). Sei G eine nichtleere Menge,
(x, y) 7→ x ⊗ y eine Abbildung (Verknüpfung).
(G, ⊗) heiÿt Gruppe, wenn die folgenden Bedingungen 1.3. erfüllt sind:
x, y, z ∈ G
1. Für alle
gilt:
(x ⊗ y) ⊗ z = x ⊗ (y ⊗ z)
2. Es gibt ein neutrales Element
3. Zu jedem
x∈G
e ∈ G,
⊗ : G×G → G
mit
(Assoziativgesetz).
x∈G
so dass für alle
gibt es ein inverses Element
und sei
x0 ∈ G,
gilt:
so dass
e ⊗ x = x ⊗ e = x.
x ⊗ x0 = x0 ⊗ x = e. x0
wird auch mit
x−1
bezeichnet.
•
x⊗y =y⊗x
Gilt zusätzlich
für alle
x, y ∈ G,
dann heiÿt
25 ) Gruppe.
(G, ⊗)
kommutative (abelsche
Beispiel 9.2.
• (Z, +), (Q, +), (R, +) sind kommutative Gruppen mit neutralem Element 0, und für a ist −a das inverse
Element.
• (Q \ {0}, ·)
ist kommutative Gruppe mit neutralem Element
Element. Ebenso ist
• (Sn , ◦)
(R \ {0}, ·)
ist Gruppe mit neutralem Element
Umkehrabbildung gegeben.
Sn
1,
und für
a ∈ Q \ {0}
ist
1/a
das inverse
kommutative Gruppe.
id{1,...,n} ,
und das inverse Element von
ist nicht kommutativ für
σ ∈ Sn
ist durch die
n ≥ 3.
• (Zm , ⊕) ist kommutative Gruppe mit neutralem Element [0]m , und für [a]m ∈ Zm
ist
[−a]m = [m − a]m
das inverse Element.
• (Z4 \ {[0]4 }, )
• (Kn , +)
ist keine Gruppe, aber
(Rn , +))
(also insbesondere
• GL(n, R) = {A ∈ Rn×n : det A 6= 0}
Satz 9.3.
Sei
(G, ⊗)
G,
falls
mit
U
x⊗g =y
x, y ∈ G.
und genau ein
h∈G
mit
h ⊗ x = y.
.
(Untergruppe)
(G, ⊗) Gruppe. Eine nichtleere Teilmenge U ⊆ G heiÿt Untergruppe
⊗ die Gruppeneigenschaften erfüllt. (U, ⊗) ist also selbst wieder eine
man (U, ⊗) ≤ (G, ⊗), bzw. nur U ≤ G.
Sei
mit der Verknüpfung
Gruppe. In diesem Falle schreibt
Satz 9.5
ist eine Gruppe mit der üblichen Matrizenmultiplikation.
(x ⊗ y)−1 = y −1 ⊗ x−1 .
Denition 9.4
von
g∈G
ist kommutative Gruppe.
ist eine abelsche Gruppe.
eine Gruppe, und seien
i) Es gibt genau ein
ii) Es gilt
(Z5 \ {[0]5 }, )
.
(Untergruppenkriterium (vergl. Satz 6.6))
Untergruppe von
G,
falls
U 6= ∅
und
x ⊗ y −1 ∈ U
(G, ⊗) Gruppe
x, y ∈ U .
Sei
für alle
und
U ⊆ G. U
Beispiel 9.6.
•
Sei
m∈N
•
Jeder lineare Teilraum (Untervektorraum) von
und
mZ = {m · z : z ∈ Z}.
• SL(n, R) = {A ∈ Rn×n : | det A| = 1}
Dann ist
(mZ, +) ≤ (Z, +).
Rn
ist eine Untergruppe von
ist eine Untergruppe von
Notation 9.7.
25 Niels Abel, 18021829
53
GL(n, R).
(Rn , +).
ist genau dann
•
(G, ⊗)
Sei
Gruppe mit neutralem Element
e,
und sei
x ∈ G.
Für
k∈Z
versteht man unter
⊗ x ⊗ ··· ⊗ x
: k ≥ 1,
x
|
{z
}
k−mal
xk = e
: k = 0,
−1
−1
−1
: k ≤ −1.
x ⊗ x ⊗ ··· ⊗ x
{z
}
|
k−mal
•
Für
x∈G
sei
< x >= {xk : k ∈ Z}.
Bemerkung 9.8.
Denition 9.9
Sei
(G, ⊗)
Gruppe und
.
(Zyklische Gruppe)
d.h. es gibt ein Element
x ∈ G,
x ∈ G.
Dann ist
Eine Gruppe
G
< x >≤ G.
heiÿt zyklisch, falls ein
x∈G
existiert mit
G =< x >,
welches die Gruppe erzeugt.
Beispiel 9.10.
• Z =< 1 >, Zm =< [1]m >.
• (Z5 \ {[0]5 }, ) =< [2]5 >
• {2k : k ∈ Z} =< 2 >
Denition 9.11
G→H
(vergl. Satz 4.40)
ist eine zyklische Untergruppe von
.
((Gruppen)-Homomorphismus)
Seien
(G, ⊗)
für alle
heiÿt Gruppenhomomorphismus (kurz: Homomorphismus). Ist
mus (kurz: Isomorphismus). In diesem Falle heiÿen
eH
und
(H, )
Gruppen. Eine Abbildung
φ :
mit
φ(x ⊗ y) = φ(x) φ(y)
Ist
(Q, ·).
das neutrale Element von
H,
G und H
φ
x, y ∈ G
bijektiv, dann heiÿt
φ
Gruppenisomorphis-
isomorph zueinander und man schreibt
G∼
= H.
so heiÿt
Kern(φ) = {x ∈ G : φ(x) = eH }
der Kern von
φ.
Beispiel 9.12. Eine lineare Abbildung von
n
m
(K , +)
Gruppen
Satz 9.13.
H
und
Seien
Kn → Km ist insbesondere ein Gruppenhomomorphismus bzgl. den
(K , +).
(G, ⊗)
und
(H, )
Gruppen mit neutralen Elementen
eG
und
eH .
Desweiteren sei
φ:G→
ein Gruppenhomomorphismus. Dann gilt
i)
ii)
φ(eG ) = eH .
φ(x−1 ) = (φ(x))−1
iii) Ist
iv)
v)
U ≤ G,
für alle
dann ist auch
x ∈ G.
φ(U ) ≤ φ(G).
Ist
V ≤ H,
dann ist auch
φ−1 (V ) ≤ G
(Urbild von
V ).
Kern(φ) ≤ G.
φ
ist injektiv genau dann wenn
Kern(φ) = {eG }.
Denition 9.14 (Ordnung einer Gruppe / eines Elements).
te von
G,
bezeichnet mit
die Ordnung von
|G|,
Sei
(G, ⊗) eine Gruppe. Die Anzahl der Elemenx ∈ G heiÿt | < x > |
heiÿt die Ordnung der Gruppe (unendlich möglich). Für
x.
Beispiel 9.15.
54
• |Z| = ∞
• |Zm | = m,
und in
Bemerkung 9.16.
ist
Z6
Sei
| < [2]6 > | = 3.
(G, ⊗)
eG .
Gruppe mit neutralem Element
|G|
Sei
x ∈ G.
Dann ist
|G| = ∞,
dann ist
endlich und sei
| < x > | = min{n ∈ N : xn = eG }.
Bemerkung 9.17.
i) Jede Gruppe der Ordnung
n
ist isomorph zu einer Untergruppe von
Sn .
(G, ⊗) eine zyklische Gruppe. Ist |G| = m, dann ist (G, ⊗) ∼
= (Zm , +), und
(G, ⊗) ∼
= (Z, +). In Worten: Zm und Z sind die einzigen zyklischen Gruppen.
ii) Sei
Denition 9.18
auf
G
.
(Nebenklassen)
(G, ⊗)
Sei
U ≤G
Gruppe, und sei
ist
Untergruppe von
G.
Die Relation
R
mit
xRy ⇔ x−1 ⊗ y ∈ U
ist eine Äquivalenzrelation (vergl. Def. 3.6). Hierbei ist
relation denierten Äquivalenzklassen
Denition 9.19
[x]R = x U
(Index einer Untergruppe)
.
x U = {x ⊗ u : u ∈ U }.
Sei
(G, ⊗)
Gruppe, und sei
U
bzgl.
26 ). Sei
G
endliche Gruppe, und sei
(Lagrange
Die durch diese Äquivalenz-
heiÿen (Links-)Nebenklassen von
Anzahl der Nebenklassen von
Satz 9.20
G
(⇔ y ∈ x U )
heiÿt Index von
U
in
G
U ≤G
U
bzgl.
G.
U ≤ G Untergruppe von G.
|G : U | bezeichnet.
Die
und wird mit
Untergruppe von
G.
Dann ist
|G| = |U | · |G : U |.
Insbesondere ist die Ordnung einer Untergruppe Teiler der Gruppenordnung.
Satz 9.21
27 ). Sei
(Euler
Korollar 9.22.
Satz 9.23
Sei
G
G
endliche Gruppe, und sei
x ∈ G.
Dann ist
endliche Gruppe mit neutralem Element
28 ). Sei
(Kleiner Satz von Fermat
a ∈ Z,
und sei
p
e,
|<x>|
und sei
ein Teiler von
x ∈ G.
Primzahl mit
Dann ist
ggT(p, a) = 1.
|G|
x
|G|.
= e.
Dann ist
ap−1 ≡ 1 mod p.
Bemerkung 9.24.
Der kleine Satz von Fermat wird häug benutzt, um zu entscheiden, ob eine gegebene
Zahl n keine Primzahl ist. Dazu sei k eine Zahl mit ggT (k, n) = 1, z.B. k = 2. Anschlieÿend berechnet man
k n−1 mod n. Ist das Ergebnis 6= 1, dann ist nach dem kleinen Satz von Fermat n keine Primzahl.
Beispiel 9.25. Sei
n = 4199.
Denition 9.26
(Normalteiler)
falls für alle
x∈G
Dann ist
.
Sei
24198 mod 4199 = 3702.
(G, ⊗)
Also ist
4199
Gruppe. Eine Untergruppe
keine Primzahl.
U ≤G
heiÿt Normalteiler von
G,
gilt:
x U = U x, d.h. {x ⊗ u : u ∈ U } = {u ⊗ x : u ∈ U }.
In diesem Falle schreibt man
Satz 9.27
.
(Faktorgruppe)
U E G.
Sei
(G, ⊗)
Gruppe mit neutralem Element
G/U = {g U : g ∈ G}
e,
und sei
U E G.
Die Menge
(Menge der Nebenklassen)
wird mittels der Verknüpfung
(g U ) (h U ) = (g ⊗ h) U
eine Gruppe, die sogenannte Faktorgruppe
(g U )−1 = g −1 U .
(G/U, ),
26 Joseph-Louis Lagrange, 17361813
27 Leonhard Euler, 17071783
28 Pierre de Fermat, 16011665
55
mit neutralem Element
eU
und inversem Element
Beispiel 9.28. Sei
Satz 9.29
seien
m ∈ N.
mZ E Z
Dann ist
.
m1 , . . . , m n ∈ N
x ∈ Z mit
Seien
(Chinesischer Restsatz)
a1 , . . . , an ∈ Z.
und die Faktorgruppe
Dann gibt es ein
x ≡ ai mod mi ,
x
ist modulo
m = m 1 · m2 · . . . · mn
Bemerkung 9.30
•
Für
•
Dann ist
•
Sei
Z/mZ
ist die Gruppe
ggT(mi , mj ) = 1
mit
für
Zm .
1 ≤ i 6= j ≤ n,
und
1 ≤ i ≤ n.
eindeutig bestimmt.
.
(Bestimmen einer Lösung)
k = 1, . . . , n
sei
Mk = m/mk .
ggT(Mk , mk ) = 1
Pn
x = i=1 ai Mi Ni .
und es gibt ein
Beispiel 9.31. Gesucht ist eine Zahl
x ∈ Z,
Nk ∈ Z
mit
Nk · Mk ≡ 1 mod mk
(siehe Lemma 4.24).
die bei Division durch 3 den Rest 2 lässt, bei Division durch 5
den Rest 3, und bei Division durch 7 den Rest 2, d.h. gesucht ist
x∈Z
mit
x ≡ 2 mod 3, x ≡ 3 mod 5
und
x ≡ 2 mod 7.
• m1 = 3, a1 = 2, m2 = 5, a2 = 3, m3 = 7, a3 = 2, m = 105.
• M1 = 35, M2 = 21, M3 = 15.
• N1 = 2, N2 = 1, N3 = 1.
• x = 2 · 35 · 2 + 3 · 21 · 1 + 2 · 15 · 1 = 233.
•
Jede Zahl der Form
Denition 9.32
y
233 + z · 105, z ∈ Z,
ist Lösung; also ist die kleinste positive Lösung 23.
. Sei R eine nichtleere Menge, und seien +, · : R × R → R mit (x, y) 7→ x +
(x, y) 7→ x · y (Multiplikation) Abbildungen. (R, +, ·) heiÿt Ring, wenn die folgenden
(Ring)
(Addition), bzw.
Bedingungen 1.4. erfüllt sind:
1.
(R, +)
ist kommutative Gruppe. Das neutrale Element von
2. Assoziativität bzgl. Multiplikation, d.h. für alle
x, y, z ∈ R
(R, +)
wird mit
0
bezeichnet.
gilt
(x · y) · z = x · (y · z).
3. Bzgl. der Multiplikation existiert ein Einselement, bezeichnet mit 1, so dass gilt:
alle
4. Distributivgesetze: Für alle
x, y, z ∈ R
R
für
gilt
x · (y + z) = x · y + x · z
5.
1·x = x·1 = x
x ∈ R.
heiÿt kommutativer Ring, wenn zusätzlich
und
(x + y) · z = x · z + y · z.
x·y =y·x
für alle
x, y ∈ R
gilt.
Beispiel 9.33.
•
Jeder Körper (vergl. Def. 4.38) ist ein Ring.
• (Z, +, ·)
ist ein Ring (aber kein Körper).
• (Zm , ⊕, )
ist ein Ring (aber i.A. kein Körper, vergl. Satz 4.40).
• Z[i] = {a + b i : a, b ∈ Z} ist ein Ring mit der gewöhnlichen Addition und Multiplikation von komplexen
Zahlen. Er heiÿt Ring der Gauÿ'schen Zahlen.
56
Denition 9.34
mit
(Polynomring). Sei (R, +, ·) ein Ring, und seien a1 , . . . , an ∈ R. Die Abbildung f : R → R
f (x) = an · xn + an−1 xn−1 + · · · + a1 · x + a0 heiÿt Polynomfunktion oder kurz Polynom. ai heiÿen die
Koezienten des Polynoms.
Der gröÿte Index
i
ai 6= 0
mit
f und
R wird
heiÿt der Grad von
Die Menge aller Polynome mit Koezienten aus
(p ⊕ q)(x) = p(x) + q(x)
p, q ∈ R[x]
ist
(R[x], ⊕, )
und
wird mit
mit
R[x]
grad(f )
bezeichnet.
bezeichnet. Mit den Verknüpfungen
(p q)(x) = p(x) · q(x),
ein Ring und heiÿt Polynomring.
Beispiel 9.35. R[x] ist der Ring aller Polynome mit Koezienten aus
5
3
2
q(x) = x + 3x − 4x + 6x + 2.
R.
Sei
p(x) = 2x2 − x + 3
und
Dann ist
(p ⊕ q)(x) = (2x2 − x + 3) + (x5 + 3x3 − 4x2 + 6x + 2)
= x5 + 3x3 − 2x2 + 5x + 5,
(p q)(x) = (2x2 − x + 3) · (x5 + 3x3 − 4x2 + 6x + 2)
= 2x7 − x6 + 9x5 − 11x4 + 25x3 − 14x2 + 16x + 6.
Denition 9.36
1S .
Ist
(Ringhomomorphismus)
Eine Abbildung
φ : R 7→ S
1.
φ(x + y) = φ(x) ⊕ φ(y)
2.
φ(1R ) = 1S .
φ
Denition 9.37
1.
φ
bijektiv, dann heiÿt
(I, +)
(Ideale)
.
und
x∈R
Seien
(R, +, ·)
und
(S, ⊕, )
1R
Ringe mit Einselementen
und
φ(x · y) = φ(x) φ(y)
für alle
x, y ∈ R.
Ringisomorphismus.
Sei
(R, +, ·)
ist Untergruppe von
2. Für alle
.
heiÿt Ringhomomorphismus falls gilt
und für alle
ein kommutativer Ring. Eine Menge
I⊆R
heiÿt Ideal von
R,
falls
(R, +).
y∈I
gilt:
x · y ∈ I.
Beispiel 9.38.
• mZ
ist ein Ideal in
(Z, +, ·).
•
In jedem Ring
•
Die Menge aller Polynome in
R
sind
{0}
und
R
Ideale.
R[x]
mit Nullstelle
1
bildet ein Ideal
I,
welches sich beschreiben lässt als
I = (x − 1)R[x].
Bemerkung 9.39.
Sei
(R, +, ·)
Ring. Ist
(R \ {0}, ·)
eine kommutative Gruppe, dann heiÿt
(R, +, ·)
Körper
(siehe Def. 4.38). Jeder Körper ist also ein Ring, aber nicht umgekehrt.
Satz 9.40 (Polynomdivision).
K[x], grad(g) ≥ 1,
gibt es
Sei (K, +, ·)
q, r ∈ K[x] mit
Körper und
f =qg⊕r
und
(K[x], ⊕, )
der zugehörige Polynomring. Für
grad(r) < grad(g).
57
f, g ∈