12. Vektoren und Matrizen
Werbung

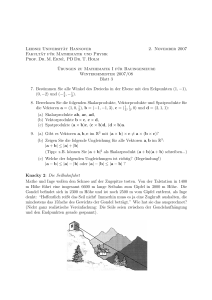
Der Gauß-Algorithmus
Vektoren und Matrizen
Beispiel 11.9 (Reaktionsgleichung in der Chemie)
Ethanol C2 H5 OH verbrennt bei Zugabe von Sauersto↵ O2 zu
Kohlendioxyd CO2 und Wasser H2 O. Wie lautet die Reaktionsgleichung?
Es soll gelten
x · C2 H5 OH + y · O2
!
z · CO2 + w · H2 O .
~v = w
~
Unbekannte sind x, y, z, w. Die Bestimmungsgleichungen ergeben sich
durch Vergleich der Atomanzahlen der beteiligten Elemente.
I
Kohlensto↵:
2x
z = 0,
I
Wassersto↵:
6x
2w = 0,
I
Sauersto↵:
x + 2y
2z
Eine Lösung hier lautet (vgl. Vorl.)
G. Skoruppa (TU Dortmund)
September 2017
150 / 165
G. Skoruppa (TU Dortmund)
Vektoren und Matrizen
n-Tupel: Praktisch zur Notation von LGS-Lösungen!
Konzept hat große Bedeutung in vielen Bereichen, wie in der Physik zur
Beschreibung gewisser physikalischer Größen:
I
Temperatur: Beschreibung durch eine reelle Zahl, sog. Skalar.
Eine Kraft hat eine Richtung und Stärke. Beschreibung durch ein
Tripel von Zahlen ! Vektor in R3 .
Geometrisch: Auf den Punkt P = (p1 , p2 ) weist“ der Ortsvektor
”
hin“: Pfeil vom Nullpunkt 0 zum Punkt P . Schreibweise:
”
✓ ◆
!
p1
0P =
2 R2 .
p2
152 / 165
✓
p1
p2
◆
Addition: Pfeilaneinandersetzung, Skalarmulti. mit c 2 R:
Streckung um |c| und falls c < 0: Richtungsänderung.
(v1 , . . . , vn )> 2 Rn
heißt Vektor (in Rn ). Die vi heißen Koordinaten oder Komponenten von ~v .
Der Nullvektor ~0 2 Rn hat alle Einträge Null.
G. Skoruppa (TU Dortmund)
September 2017
Parallel verschobene ✓
Exemplare
eines solchen Ortsvektors sympolisieren
◆
p1
den gleichen Vektor
. Die Darstellung von Vektoren als Pfeile darf
p2
also an beliebigen Punkten starten.
Definition 12.1 (Vektor)
Ein n-Tupel von reellen Zahlen
0 1
v1
B .. C
~v := @ . A =:
vn
Mathematischer Vorkurs
Vektoren und Matrizen
12. Vektoren und Matrizen
I
für alle i = 1, . . . , n
(Elemente c 2 R heißen Skalare.)
2 · CO2 + 3 · H2 O .
Mathematischer Vorkurs
vi = wi
1
v1 + w1
B
C
..
~v + w
~ := @
(Vektoraddition)
A
.
vn + wn
0
1
c · v1
B
C
c · ~v := @ ... A
(Skalarmultiplikation)
c · vn
w=0
!
genau falls
0
3 Gleichungen und 4 Unbekannte? Keine eindeutige Lösung?
C2 H5 OH + 3 · O2
Definition 12.2 (Vektorgleichheit, Vektoraddition, Skalarmultiplikation)
0 1
0 1
v1
w1
B .. C
B .. C
Für ~v = @ . A , w
~ = @ . A aus Rn und c 2 R definiert man
vn
wn
Mathematischer Vorkurs
September 2017
151 / 165
G. Skoruppa (TU Dortmund)
Mathematischer Vorkurs
September 2017
153 / 165
Vektoren und Matrizen
Vektoren und Matrizen
Satz 12.3
Definition 12.6 (Lineare Abhängigkeit, lineare Unabhängigkeit)
Für alle ~v , w,
~ ~u 2 Rn und a, b 2 R gilt:
Sei V ein R-Vektorraum und ~v1 . . . , ~vn 2 V .
1. (~v + w)
~ + ~u = ~v + (w
~ + ~u)
2. ~v + w
~ =w
~ + ~v
~
3. ~v + 0 = ~v
4. Zu ~v ex.
(Assoziativgesetz)
(Kommutativgesetz)
1. ~v1 , . . . , ~vn heißen linear abhängig (l.a.), wenn es Koeffizienten
1 , . . . , n gibt, die nicht alle 0 sind und so dass gilt:
(Neutrales Element)
~v := ( 1) · ~v mit ~v + ( ~v ) = ~0
(Inverses Element)
5. a(b~v ) = (ab)~v
6. 1 · ~v = ~v
7. (a + b)~v = a~v + b~v
(Distributivgesetz 1)
8. a(~v + w)
~ = a~v + aw
~
(Distributivgesetz 2)
Definition 12.4 (R-Vektorraum)
Ist in einer Menge V eine Verknüpfung +“ von Elementen und eine
”
Skalarmultiplikation ·“ von reellen Zahlen mit Elementen aus V erklärt,
”
die beide wieder Elemente aus V liefern, so heißt V ein R-Vektorraum,
wenn (mit einem gewissen ~0 2 V ) in V die Aussagen des Satzes 12.3
G. Skoruppa (TU Dortmund)
Mathematischer Vorkurs
September 2017
154 / 165
gelten.
v1
1~
= ~0.
D.h.:
v1
1~
+ ... +
vn
n~
= ~0 gilt nur genau falls alle
i
= 0.
Satz 12.7
1. Kann der Vektor ~v als Linearkombination von n vorgegebenen l.u.
Vektoren dargestellt werden, so sind die Koeffizienten dabei eindeutig:
~v
=
v1
1~
)
i
G. Skoruppa (TU Dortmund)
+ ... +
= µi ,
vn
n~
= µ1~v1 + . . . + µn~vn
i = 1, . . . , n.
Mathematischer Vorkurs
September 2017
156 / 165
Vektoren und Matrizen
Beispiel 12.5 (R-Vektorräume)
2. n vorgegebene Vektoren sind genau dann l.a., wenn wenigstens einer
von ihnen sich als Linearkombination der anderen darstellen läßt.
I
Rn ,
I
F(R, R) sei die Menge aller reellwertigen und auf ganz R definierten
Funktionen. Man schreibt diese symbolisch so: f : R ! R.
Verwende als +“ die übliche Addition von Funktionen f, g:
”
f + g ist die Funktion, die x 2 R den Wert f (x) + g(x) 2 R zuordnet:
(f + g)(x) := f (x) + g(x).
Verwende als ·“ die übliche Multiplikation von 2 R mit einer
”
Funktion f : f ist die Funktion, die x 2 R den Wert · f (x) 2 R
zuordnet:
( · f )(x) :=
· f (x).
Die Vektorraumnull ~0 ist hier die konstante Funktion f mit f (x) = 0.
Man prüft problemlos alle 8 Eigenschaften eines Vektorraums, z.B.
gilt die Gleichheit f + g = g + f (als Funktionen), weil für alle x 2 R
auf Zahlenebene f (x) + g(x) = g(x) + f (x) gilt, etc.
Mathematischer Vorkurs
vn
n~
2. Sind ~v1 bis ~vn nicht linear abhängig, so heißen sie linear unabhängig
(l.u.).
Vektoren und Matrizen
G. Skoruppa (TU Dortmund)
+ ... +
September 2017
155 / 165
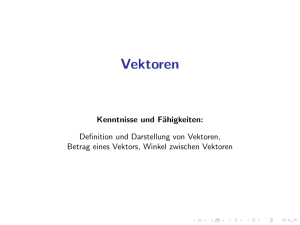
3. Zwei Vektoren ~v , w
~ sind genau dann l.a., wenn ~v ein Vielfaches von w
~
oder umgekehrt ist.
Geometrisch: Sie haben gleiche oder umgekehrte Richtung (= kollineare Vektoren).
Blau/grün bzw. rot/gelb kollinear, nicht
aber rot/blau!
4. Geometrische Deutung bei 3 Vektoren: Drei Vektoren ~v , w,
~ ~u sind
genau dann l.a., wenn sie in einer Ebene liegen. (= komplanare
Vektoren).
Beweis:
Zu 1. vgl. Vorlesung.
G. Skoruppa (TU Dortmund)
Mathematischer Vorkurs
September 2017
157 / 165
Vektoren und Matrizen
Vektoren und Matrizen
Beispiel 12.8
Zu 2. Sind ~v1 . . . , ~vn l.a., so gibt es eine Darstellung
v1 + . . . + n~vn = ~0 wobei ein k 6= 0. Es folgt:
1~
~vk =
1
k
· ~v1
k 1
...
k
· ~vk
1
k+1
k
· ~vk+1
...
n
k
· ~vn .
Bei einer Darstellung ~vk = µ1~v1 + . . . + µk 1~vk 1 + µk+1~vk+1 + . . . + µn~vn
folgt umgekehrt sofort die L.A. der Vektoren ~v1 . . . , ~vn .
Zu 3./4. Einfache Folge von 2.
h := a · f + b · g = 0-Funktion.
Können also a, b 2 R, nicht beide 0, gefunden werden, so dass für alle
Argumente x 2 R gilt:
Aufgabe:
1. Man untersuche folgende Vektorssysteme in R3 auf lineare
Unabhängigkeit.
0 1
0 1
0
1
0 1
0 1
1
1
1
1
0
a) @ 1 A , @ 0 A , @ 0 A,
b) @ 0 A , @ 1 A ,
1
1
1
0
0
G. Skoruppa (TU Dortmund)
Sind die Vektoren f, g 2 F(R, R) mit f (x) := x, g(x) := x2 l.u.? f, g sind
ja Funktionen: sie stammen aus dem Funktionenraum F(R, R). Der
Nullvektor“ in diesem Raum ist die 0-Funktion.
”
Der Test auf L.A. beginnt wie üblich: f, g sind genau dann l.a., wenn es
a, b 2 R mit (a, b) 6= (0, 0) gibt, so dass
Mathematischer Vorkurs
h(x) := a · f (x) + b · g(x) = ax + bx2 = 0
0
1
0
@ 0 A.
0
September 2017
158 / 165
Nein, das ist nicht möglich, denn wenn a, b nicht beide 0 sind, ist h(x)
o↵ensichtlich ein Polynom 1. Grades oder gar 2. Grades. Solche Polynome
haben bekanntlich nur genau eine bzw. max. zwei, aber jedenfalls nicht
unendlich viele Nullstellen. Damit sind f, g mit f (x) = x, g(x) = x2 l.u.
G. Skoruppa (TU Dortmund)
Vektoren und Matrizen
0
c) @
1
1
2 A,
1
0
1
1
@ 1 A,
0
0
@
160 / 165
Vektoren und Matrizen
1
1
2 A
3
+ ... +
September 2017
Definition 12.9
Sei V ein R-Vektorraum. Dann heißt eine Auswahl von Vektoren
v~1 , . . . , v~n 2 V Basis von V , wenn
1. sich jedes ~b 2 V als Linearkombination von v~1 , . . . , v~n darstellen läßt
und
Bemerkung: Linear unabhängig oder nicht? Bei c) sollte aufgefallen
sein: Test auf L.U./L.A. von Vektoren ~v1 . . . , ~vn 2 Rn ist als homogenes
LGS formulierbar ! Gauß-Algorithmus. Zu betrachten ist die Gleichung
v1
1~
Mathematischer Vorkurs
vn
n~
2. die v~1 , . . . , v~n l.u. sind.
Damit sind die Koeffizienten in der Darstellung
~b =
=0
v1
1~
+ ... +
vn
n~
eines ~b 2 V eindeutig (vgl. Satz 12.7, 1.).
Hat dieses LGS nur die triviale Lösung ~0, dann sind die Vektoren l.u..
Beispiel 12.10
I
Die Standardbasis für Rn lautet:
e~1 := (1, 0, ..., 0)> ,
G. Skoruppa (TU Dortmund)
Mathematischer Vorkurs
September 2017
159 / 165
G. Skoruppa (TU Dortmund)
e~2 := (0, 1, 0, ..., 0)> ,
Mathematischer Vorkurs
...
,
e~n := (0, ..., 0, 1)> .
September 2017
161 / 165
Vektoren und Matrizen
I
Vektoren und Matrizen
Eine “Nicht-Standardbasis” für R3 ist z.B.
a~1 := (1, 1, 1)> ,
a~2 := (1, 0, 1)> ,
a~3 := (1, 0, 1)> .
Warum Basis? 1) L.u. Vektoren! Vgl. Aufgabe 1 vier Seiten zuvor.
2) Jeder Vektor ~b 2 R3 ist als Linearkombination der ~ai dargestellbar,
wie man durch Anwendung des Gauß-Algorithmus sieht:
Suche
1,
2,
3
2 R, die das LGS mit den Spalten ~a1 , ~a2 , ~a3 lösen:
1
k 1
1
0
k 0
k 0
1
0
1
1
1
0
1
0
1
1 b1
1 b3
2 b1
b1
b2
b3
b2
b2
b3
1
1
Beispiele und Bemerkungen:
1. dim Rn = n, denn Standardbasis hat die Länge n.
2. Die Menge der Polynome vom Grad n bildet einen (n + 1)-dim. VR.
3. Jeder VR hat eine Basis. Der Beweis ist aber mathematisch
anspruchsvoll! Manchmal kann die Basis unendlich lang sein, d.h.
dim V = 1. Dann muss die Basisdefinition etwas modifiziert werden.
Beispielsweise ist F(R, R) unendlichdimensional.
1
Damit ist das LGS eindeutig lösbar (von unten nach oben kommt in
jeder Zeile genau eine Unbekannte hinzu!). Für ~b = 0 haben wir
übrigens damit nochmals die L.U. der Vektoren ~a1 , ~a2 , ~a3 verifiziert.
G. Skoruppa (TU Dortmund)
Mathematischer Vorkurs
September 2017
162 / 165
G. Skoruppa (TU Dortmund)
Vektoren und Matrizen
Mathematischer Vorkurs
September 2017
164 / 165
September 2017
165 / 165
Vektoren und Matrizen
Für ein und den selben Vektorraum kann man unterschiedliche Basen
angeben. Eine Eigenschaft ist aber allen Basen gemeinsam:
Definition und Satz 12.11
Hat der R-VR V eine Basis aus n Vektoren, dann besteht auch jede
andere Basis von V aus n Vektoren. Die invariante Basislänge“ nennt
”
man die Dimension von V . Symbol:
dim(V ) = n .
Zusätzlich definiert man dim({0}) = 0.
Gilt dim(V ) = n, so sind
1. m > n Vektoren aus V sind stets l.a. .
D.h. dim(V ) ist die maximale Anzahl l.u. Vektoren in V .
2. m < n Vektoren aus V können nie ganz V aufspannen.
D.h. dim(V ) ist die minimale Anzahl von Vektoren mit der
Eigenschaft, ganz V aufzuspannen.
3. n l.u. Vektoren aus V bilden stets eine Basis von V .
G. Skoruppa (TU Dortmund)
Mathematischer Vorkurs
September 2017
163 / 165
G. Skoruppa (TU Dortmund)
Mathematischer Vorkurs