Vorlesung: Funktionentheorie und Vektoranalysis
Werbung

Vorlesung:
Funktionentheorie und Vektoranalysis
Annette A’Campo–Neuen
Universität Basel, Herbstsemester 2014
Inhaltsverzeichnis zur Vorlesung Funktionentheorie und
Vektoranalysis
1 Differential- und Integralrechnung im Komplexen
1.1 Gebiete in der komplexen Zahlenebene . . .
1.2 Komplexe Differenzierbarkeit . . . . . . . .
1.3 Umkehrfunktionen . . . . . . . . . . . . . .
1.4 Komplexe Wegintegrale . . . . . . . . . . . .
1.5 Cauchyscher Integralsatz . . . . . . . . . . .
1.6 Cauchyformel . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
8
15
18
22
26
2 Holomorphe Funktionen
2.1 Exkurs: Konvergenz von Reihen . .
2.2 Potenzreihen . . . . . . . . . . . . .
2.3 Komplexe Taylorentwicklung . . . .
2.4 Nullstellen holomorpher Funktionen
2.5 Singularitäten . . . . . . . . . . . .
2.6 Riemannsche Zahlenkugel . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
31
31
34
38
41
43
49
3 Residuen
3.1 Residuensatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Umlaufzahlversion des Residuensatzes . . . . . . . . . . . . . . . . . .
3.3 Residuenkalkül . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
52
55
58
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Fouriertheorie
65
4.1 Fourierreihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.2 Fouriertransformation und Faltung . . . . . . . . . . . . . . . . . . . 68
4.3 Diracsche Deltafunktion . . . . . . . . . . . . . . . . . . . . . . . . . 73
5 Untermannigfaltigkeiten
5.1 Glatte Flächen in R3 . . . . . . . . . . . . .
5.2 Satz über implizite Funktionen . . . . . . .
5.3 Untermannigfaltigkeiten . . . . . . . . . . .
5.4 Extremwertaufgaben mit Nebenbedingungen
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
77
77
82
85
91
6 Integration auf Flächen
94
6.1 Integration auf Flächen . . . . . . . . . . . . . . . . . . . . . . . . . . 94
6.2 Divergenz und Satz von Gauss . . . . . . . . . . . . . . . . . . . . . . 100
6.3 Rotation und Satz von Stokes . . . . . . . . . . . . . . . . . . . . . . 102
Kapitel 1
Differential- und Integralrechnung im Komplexen
1.1
Gebiete in der komplexen Zahlenebene
Erinnern wir zunächst an die Konstruktion der komplexen Zahlen. Die Menge C :=
{a + ib | a, b ∈ R} wird zu einem Körper, indem man Addition und Multiplikation
folgendermassen erklärt:
(a + ib) + (c + id) := (a + c) + i(b + d) und (a + ib)(c + id) := (ac − bd) + i(ad + bc) .
Diese Regeln ergeben sich zwangsläufig, wenn man verlangt, dass i2 = −1 sein
soll und ausserdem alle üblichen Körperrechenregeln gelten. Wir können die reellen
Zahlen als Teilmenge von C auffassen, indem wir a ∈ R als Zahl a + i · 0 auffassen.
Das Nullelement in C ist die Zahl 0 + i0, die wir mit 0 ∈ R identifizieren, und das
multiplikative Inverse einer Zahl z = a + ib 6= 0 lautet, wie man direkt nachrechnen
kann,
a
b
(a + ib)−1 = 2
−i 2
.
2
a +b
a + b2
Der Körper C hat einen wichtigen Automorphismus über R, nämlich die komplexe
Konjugation
z = a + ib 7→ z := a − ib .
Damit ist gemeint, dass diese Zuordnung mit Addition und Multiplikation verträglich ist. Gleichzeitig ist dies (ausser der identischen Abbildung) der einzige
Körperautomorphismus von C, der alle reellen Zahlen festhält.
Wir können die komplexen Zahlen mit den Punkten einer Ebene identifizieren, indem wir Real- bzw. Imaginärteil als kartesische Koordinaten verwenden. Man spricht
deshalb auch von der komplexen Zahlenebene. Bei der Beschreibung in Polarkoordinaten wird zur Festlegung eines Punktes z = x + iy 6= 0 in der Ebene R2 sein
Abstand r zum Nullpunkt und der Winkel ϕ, den der Ortsvektor mit der positiven
x-Achse einschliesst, verwendet. Es gelten die folgenden Beziehungen:
x = r cos ϕ und y = r sin ϕ .
Auf Euler geht die folgende Schreibweise zurück:
z = r(cos ϕ + i sin ϕ) = reiϕ .
Diese Schreibweise wird in Analogie zur reellen Exponentialfunktion verwendet, weil
auch hier wieder das charakteristische Gesetz der Exponentialfunktion gilt, nämlich:
ei(ϕ+ψ) = eiϕ · eiψ .
4
Kapitel 1. Differential- und Integralrechnung im Komplexen
Hinter dieser Kompaktschreibweise verbergen sich die Additionstheoreme von Sinus
und Cosinus.
Die Addition und Multiplikation von komplexen Zahlen lässt sich mithilfe der
Zahlenebene nun folgendermassen geometrisch deuten: die Addition entspricht der
Vektoraddition und man multipliziert zwei komplexe Zahlen, indem man die Längen
der entsprechenden Ortsvektoren multipliziert und die Winkel, die sie mit der positiven x-Achse einschliessen, addiert. Die komplexe Konjugation entspricht einer
Spiegelung an der reellen Achse.
Eine der wichtigsten Aussagen über komplexe Zahlen ist der Fundamentalsatz
der Algebra:
1.1.1 Satz Sei p(z) = z n + an−1 z n−1 + · · · + a1 z + a0 ein Polynom von Grad n ∈ N
mit Koeffizienten aj ∈ C. Dann gibt es eine komplexe Zahl z0 ∈ C mit p(z0 ) = 0.
Durch vollständige Induktion kann man hieraus schliessen, dass p sogar (mit
Vielfachheit gezählt) genau n komplexe Nullstellen besitzt. Genauer gilt folgendes:
1.1.2 Satz Sei p(z) = z n + an−1 z n−1 + . . . + a1 z + a0 ein Polynom von Grad n ∈ N
mit Koeffizienten aj ∈ C. Dann gibt es komplexe Zahlen z1 , . . . , zn ∈ C mit
z n + an−1 z n−1 + . . . + a1 z + a0 = (z − z1 )(z − z2 ) . . . (z − zn ) .
Die Liste der zj besteht aus sämtlichen Nullstellen des Polynoms p, dabei können
Nullstellen auch mehrfach aufgelistet sein. Die Häufigkeit, mit der eine bestimmte
Nullstelle in der Liste vorkommt, bezeichnet man als Vielfachheit der Nullstelle.
Hat das Polynom p reelle Koeffizienten, so besteht die Nullstellenmenge in C aus
reellen Zahlen und Paaren von zueinander konjugierten “echt” komplexen Zahlen.
Denn wir können folgendes festhalten:
1.1.3 Bemerkung Sind alle Koeffizienten des Polynoms p reell, und ist w eine
Nullstelle, so ist auch w eine Nullstelle und zwar von derselben Vielfachheit.
Beweis. Sind alle Koeffizienten ak des Polynoms p reell, so folgt mit den Rechenregeln für die komplexe Konjugation aus p(w) = 0:
0 = p(w) = w n + an−1 w n−1 + . . . + a1 w + a0 = wn +an−1 w n−1 +. . .+a1 w+a0 = p(w) .
Das bedeutet: Ist w eine Nullstelle von p, so auch w. Ist ausserdem w 6= w, so können
wir p durch das quadratische Polynom q := (z−w)(z−w) = z 2 −(w+w)z+w·w teilen.
Da w + w = 2 Re(w) und w · w = |w|2 reelle Zahlen sind, ist q ein reelles Polynom.
Nach Teilung von p durch q bleibt also ein reelles Polynom kleineren Grades übrig.
Per Induktion über den Grad kann man nun schliessen, dass die Vielfachheiten der
q.e.d.
Nullstelle w und der Nullstelle w miteinander übereinstimmen.
1.1. Gebiete in der komplexen Zahlenebene
5
1.1.4 Folgerung Hat ein reelles Polynom p eine Nullstelle w ∈ C \ R, so kann
man, wie eben gezeigt, über den reellen Zahlen einen quadratischen Faktor von p
abspalten, nämlich q := (z − w)(z − w) = z 2 − (w + w)z + w · w. Durch vollständige
Induktion folgt hieraus, dass jedes Polynom mit reellen Koeffizienten sich vollständig
in ein Produkt aus linearen oder quadratischen Polynomfaktoren zerlegen lässt.
1.1.5 Beispiel Das Polynom f (x) = x4 + 5x2 + 4 lässt sich schreiben als f (x) =
(x2 + 1)(x2 + 4) und hat die komplexen Nullstellen ±i und ±2i.
Wenden wir uns nun Teilmengen der komplexen Zahlenebene zu. Wir wollen eine
Teilmenge U ⊂ C offen nennen, wenn die entsprechende Teilmenge in R2 offen ist.
Wir übernehmen also die Topologie von R2 .
1.1.6 Definition Eine Teilmenge G ⊂ C heisst Gebiet, wenn G offen und zusammenhängend ist. Letzteres bedeutet, dass G nicht als disjunkte Vereinigung von zwei
in G abgeschlossenen Teilmengen dargestellt werden kann.
Hier eine Reihe von häufig vorkommenden Beispielen.
1.1.7 Beispiele
• C oder C∗ := C \ {0};
• die obere Halbebene H := {z ∈ C | Im(z) > 0};
• die geschlitzte Ebene {z ∈ C | z ∈
/ R<0 };
• die Einheitskreisscheibe E := {z ∈ C | |z| < 1};
• eine Kreisscheibe Kr (z0 ) := {z ∈ C | |z − z0 | < r} von Radius r > 0 um den
Punkt z0 ;
• ein Kreisring {z ∈ C | r < |z − z0 | < R} (0 < r < R fest gewählt) um den
Punkt z0 ;
• ein horizontaler Streifen {z ∈ C | y1 < Im(z) < y2 }.
Betrachten wir jetzt komplexwertige Funktionen, definiert auf Gebieten der komplexen Ebene.
Sei dazu G ⊂ C ein Gebiet und f : G → C eine Zuordnung. Die Funktion f ist
stetig im Punkt z0 ∈ G, wenn für jede gegen z0 konvergierende Folge von Punkten
zn ∈ G gilt:
lim f (zn ) = f (z0 ) .
n→∞
Wie im reellen Fall kann man einsehen, dass zum Beispiel alle komplexen Polynomfunktionen stetig sind. Auch jede Funktion der Form f (z) = p(z)
(wobei p, q
q(z)
komplexe Polynome sind und z ∈ C, q(z) 6= 0), ist stetig.
Um sich eine solche Funktion zu veranschaulichen, gibt es mehrere Möglichkeiten.
Man kann die (dreidimensionalen) Graphen des Realteils und des Imaginärteils der
Funktion betrachten, oder die Funktion als Transformation eines Teils der Ebene
auffassen. Schauen wir uns einige Beispiele genauer an.
6
Kapitel 1. Differential- und Integralrechnung im Komplexen
1. Sei z0 ∈ C fest gewählt. Die Funktion f : C → C, z 7→ z + z0 , beschreibt eine
Parallelverschiebung der Ebene um den Vektor z0 .
2. Die Multiplikation mit der komplexen Zahl i bewirkt eine Drehung der komplexen Ebene um 90◦ .
3. Sei jetzt allgemeiner a > 0, ψ ∈ R fest gewählt und w = aeiψ . Die Multiplikationsabbildung f : C → C, z = reiϕ 7→ w · z = arei(ϕ+ψ) , beschreibt eine
Drehung um den Nullpunkt um den Winkel ψ, gefolgt von einer Streckung um
den Faktor a. Man spricht hier von einer Drehstreckung.
4. Die komplexe Konjugation C → C, z 7→ z entspricht der Spiegelung an der
reellen Achse. Und die Funktion z 7→ i · z beschreibt die Spiegelung an der
Winkelhalbierenden.
5. Die Abbildung f : C → C, z 7→ z 2 schreibt sich in Polarkoordinaten so: reiϕ 7→
r 2 ei2ϕ . Auf dem Einheitskreis zum Beispiel bewirkt diese Abbildung also jeweils
eine Verdopplung des Winkels. Stellen wir uns vor, eine Schlange winde sich
um die rechte Hälfte des Einheitskreises (von −i nach i). Nach Anwendung
von f erhalten wir folgendes Bild: die Schlange windet sich nun um den ganzen
Einheitskreis und beisst sich in den Schwanz.
Die rechte Halbebene G = {z ∈ C | Re(z) > 0} wird von f bijektiv auf
die geschlitzte Ebene abgebildet. Denn mit Polarkoordinaten können wir die
rechte Halbebene so beschreiben: G = {reiϕ | r > 0, − π2 < ϕ < π2 }, also ist
f (G) = {reiϕ | r > 0, −π < ϕ < π} .
Und dies ist nichts anderes als die oben beschriebene längs der negativen xAchse geschlitzte Ebene.
6. Die Zuordnung
f : z 7→
z−i
z+i
definiert eine Bijektion von der oberen Halbebene H auf die Einheitskreisscheibe E.
Denn diejenigen Punkte der komplexen Zahlenebene, die von i und −i gleich
weit entfernt sind, bilden gerade die reelle Achse, während sämtliche Punkte
oberhalb der reellen Achse näher an i als an −i liegen. Sämtliche Punkte unterhalb der reellen Achse sind von i weiter entfernt also von −i. Das bedeutet
für z ∈ C \ {i}:
f (z) ∈ E
⇔
|z − i| < |z + i|
⇔
z ∈ H = {z ∈ C | Im(z) > 0} .
Ausserdem ist die Zuordnung umkehrbar und daher bijektiv, denn aus f (z) =
.
w folgt z = i · 1+w
1−w
1.1. Gebiete in der komplexen Zahlenebene
7
Die komplexe Exponentialfunktion kann man folgendermassen definieren. Für
z = x + iy (x, y ∈ R) setzen wir
exp(z) = ez := ex · eiy = ex (cos y + i sin y) .
Diese Vorschrift garantiert, dass auch für die komplexe Exponentialfunktion die bekannten Potenzrechenregeln gelten, und sie definiert eine stetige Funktion. Weil die
reelle Exponentialfunktion nur positive Werte annimmt, ist das Bild der komplexen
Exponentialfunktion die punktierte Ebene C \ {0}. Die Funktion exp ist periodisch
in y mit Periode 2π, wenn wir sie aber einschränken, zum Beispiel auf den horizontalen Streifen zwischen −π und π, erhalten wir eine Bijektion mit der geschlitzten
Ebene:
exp: S = {z ∈ C | −π < Im(z) < π} → G = {z ∈ C | z ∈
/ R≤0 } .
Dabei werden Parallelen zur x-Achse auf Halbstrahlen in der geschlitzten Ebene
abgebildet, und senkrechte Abschnitte der Form {a + iy | y ∈ R, −π < y < π}
(a ∈ R fest) gehen über in Kreislinien um den Nullpunkt von Radius ea , denen der
Schnittpunkt mit der negativen reellen Achse fehlt.
Da die Exponentialfunktion als Abbildung von S nach G bijektiv ist, können
wir sie dort umkehren und erhalten so den sogenannten Hauptzweig des komplexen
Logarithmus, nämlich:
ln: G = {reiϕ | −π < ϕ < π} → S,
ln(reiϕ ) = ln(r) + iϕ .
8
1.2
Kapitel 1. Differential- und Integralrechnung im Komplexen
Komplexe Differenzierbarkeit
Analog zum reellen Fall definiert man komplexe Differenzierbarkeit folgendermassen:
1.2.1 Definition Sei G ⊂ C ein Gebiet und f : G → C eine komplexwertige Funktion. Die Funktion f ist komplex differenzierbar an der Stelle z0 ∈ G, falls der
Grenzwert
f (z0 + z) − f (z0 )
lim
= f ′ (z0 )
z→0
z
existiert. Ist dies der Fall, bezeichnet man f ′ (z0 ) als die komplexe Ableitung von
f an der Stelle z0 . Ist f auf ganz G komplex differenzierbar, nennt man f auch
holomorph auf G.
Äquivalent dazu ist die schon aus der reellen Situation bekannte Dreigliedentwicklung:
1.2.2 Bemerkung Die komplexe Funktion f : G → C ist genau dann an der Stelle
z0 ∈ G komplex differenzierbar, wenn es eine Zahl w ∈ C, eine Kreisscheibe Kǫ (z0 ) ⊂
G und eine Funktion r: K := Kǫ (0) → C gibt, so dass für alle z ∈ K gilt:
f (z0 + z) = f (z0 ) + w · z + r(z) ,
= 0. Ist dies der Fall, so ist w = f ′ (z0 ).
wobei limz→0 r(z)
z
1.2.3 Folgerung Ist eine komplexe Funktion komplex differenzierbar, so ist sie
auch stetig. Für die komplexe Ableitung gelten analoge Rechenregeln wie für die
reelle Ableitung von reellwertigen Funktionen in einer reellen Variablen, nämlich
die Summenregel, die Produktregel, die Quotientenregel und die Kettenregel. Die
Beweise lassen sich wörtlich übertragen.
Zum Beispiel ist die Ableitung der Funktion f (z) = z n (n ∈ N, z ∈ C) wie erwartet f ′ (z) = nz n−1 für alle z ∈ C. Dies ergibt sich durch vollständige Induktion aus
der Produktregel. Mithilfe der Quotientenregel kann man zeigen, dass die Ableitung
der Funktion g: C∗ → C, definiert durch g(z) = z1 , lautet: g ′(z) = − z12 . Ist p eine
Polynomfunktion von Grad n der Form p(z) = z n + an−1 z n−1 + . . . + a1 z + a0 , dann
gilt wegen der elementaren Rechenregeln für Ableitungen analog zum reellen Fall:
p′ (z) = nz n−1 + an−1 (n − 1)z n−2 + . . . + a1 .
Die Ableitung p′ ist also eine Polynomfunktion von Grad n − 1. Auch sämtliche
rationalen Funktionen in einer komplexen Variablen sind komplex differenzierbar.
Die komplexe Ableitung können wir mithilfe der Quotientenregel bestimmen.
1.2.4 Bemerkung Die komplexe Konjugation ist an keiner Stelle komplex differenzierbar. Denn sei z0 ∈ C fest gewählt. Dann ist
z0 + ti − z0
z0 + t − z0
= −1 6= 1 = lim
.
t∈R,t→0
t∈R,t→0
ti
t
lim
Die komplexe Ableitung an der Stelle z0 kann also nicht existieren.
1.2. Komplexe Differenzierbarkeit
9
Kommen wir nun zu einer weiteren Charakterisierung der komplexen Differenzierbarkeit. Dazu werden wir komplexwertige Funktionen in einer komplexen Variablen als Funktionen in zwei reellen Variablen mit Werten in R2 interpretieren. Ein
vorgegebenes Gebiet G ⊂ C können wir natürlich als Teilmenge D des R2 auffassen,
indem wir setzen D := {(x, y) ∈ R2 | x + iy ∈ G}. Ist f : G → C eine komplexwertige
Funktion, so können wir die Bilder von f jeweils in Real- und Imaginärteil zerlegen,
und erhalten so reellwertige Funktionen u, v auf D:
f (x + iy) = u(x, y) + iv(x, y).
Der komplexen Funktion f entspricht also die reelle Abbildung
u(x, y)
2
F : D → R , (x, y) 7→
.
v(x, y)
1.2.5 Beispiele
• Die Multiplikation mit der Zahl i liefert die Abbildung f : C →
C, gegeben durch f (x+ iy) = i(x+ iy) = −y + ix. Real- und Imaginrteil lauten
also hier u(x, y) = −y und v(x, y) = x. Die entsprechende reelle Abbildung ist
also gegeben durch die Multiplikation mit der Drehmatrix zum Winkel 90◦ :
−y
0 −1
x
2
2
F : R → R , F (x, y) =
=
.
x
1 0
y
• Sei jetzt allgemeiner w = a + ib = r cos ϕ + ir sin ϕ in C fest gewählt. Die
Multiplikation mit der Zahl w definiert die Abbildung f : C → C, f (z) = wz.
Setzen wir z = x + iy ein, erhalten wir f (x + iy) = (a + ib)(x + iy) = (ax −
by) + i(ay + bx). Also ist hier u(x, y) = ax − by und v(x, y) = ay + bx, und die
entsprechende reelle Abbildung lautet
a −b
x
ax − by
2
2
F : R → R , F (x, y) =
=
.
b a
y
bx + ay
Es handelt sich hier also um die lineare Abbildung, die durch Multiplikation
mit der Matrix
a −b
cos ϕ − sin ϕ
=r
b a
sin ϕ cos ϕ
beschrieben wird, nämlich die Drehung um den Winkel ϕ und anschliessende
Streckung um den Faktor r, wie bereits im vorigen Kapitel beschrieben.
• Zu der Funktion f (z) = z 2 auf G = C gehört die Abbildung
2
2
F:R → R ,
F (x, y) =
x2 − y 2
2xy
Denn hier ist f (x + iy) = (x + iy)2 = (x2 − y 2) + i(2xy).
.
10
Kapitel 1. Differential- und Integralrechnung im Komplexen
1.2.6 Bemerkung Eine reelle 2 × 2-Matrix
A ist genau dann eine Drehstreckungsa −b
matrix, also von der Form A =
, wenn
b a
A·
0 −1
1 0
=
0 −1
1 0
· A.
Das bedeutet, dass die Multiplikation mit der Matrix A mit der Drehung um 90◦
vertauschbar ist. Oder anders gesagt, die Multiplikation mit A, aufgefasst als Abbildung LA : C → C, ist nicht nur über R, sondern sogar über C linear.
Wir halten folgendes fest:
1.2.7 Satz Die Funktion f : G → C ist genau dann im Punkt z0 = x0 + iy0 ∈ G
komplex differenzierbar, wenn die entsprechende Abbildung F : D → R2 im Punkt
(x0 , y0) reell differenzierbar ist und das Differential DF(x0 ,y0 ) von F an dieser Stelle
C-linear ist. Das bedeutet, dass die lineare Abbildung DF(x0 ,y0 ) eine Drehstreckung
ist und sich daher als Multiplikation mit einer komplexen Zahl auffassen lässt. Diese
komplexe Zahl wiederum ist nichts anderes als die komplexe Ableitung von f bei z0 .
Beweis. Nehmen wir zunächst an, F sei im Punkt (x0 , y0 ) reell differenzierbar. Nach
Definition heisst das, es gibt im Definitionsbereich D eine Kreisscheibe Kǫ (x0 , y0)
und eine Funktion R: K = Kǫ (0) → R2 , so dass für alle v ∈ K gilt
F ((x0 , y0 ) + v) = F ((x0 , y0 )) + DF(x0 ,y0 ) (v) + R(v) ,
wobei limv→0
R(v)
||v||
= 0. Sei ausserdem DF(x0 ,y0 ) eine Drehstreckung. Dann ist die
a −b
Jacobimatrix von F an der Stelle (x0 , y0 ) eine 2 × 2-Matrix der Form
b a
(a, b ∈ R). Wie eben gezeigt, können wir die Ausführung der Drehstreckung auch
als Multiplikation mit der komplexen Zahl a+ib auffassen. Fassen wir nun alle Terme
in der Dreigliedentwicklung von F komplex auf, erhalten wir
f (z0 + z) = f (z0 ) + (a + ib) · z + r(z) ,
wobei z = x+ iy und r(z) = R1 (x, y) + iR2(x, y) (R1 , R2 Komponenten der Funktion
R oben). Dies ist bereits die komplexe Dreigliedentwicklung für f . Denn es gilt
limz→0 | r(z)
| = 0, da nach Annahme limv→0 R(v)
= 0. Deshalb ist auch limz→0 r(z)
=
z
||v||
z
′
0. Also ist f tatsächlich komplex differenzierbar und f (z0 ) = a + ib.
Ist umgekehrt f komplex differenzierbar, so können wir die komplexe Dreigliedentwicklung von f in eine Dreigliedentwicklung von F umschreiben. Die Multiplikation mit f ′ (z0 ) entspricht dabei der Multiplikation mit der Jacobimatrix. Deshalb
ist F reell differenzierbar und das Differential von F an der Stelle (x0 , y0) muss in
diesem Fall eine Drehstreckung sein.
q.e.d.
1.2. Komplexe Differenzierbarkeit
11
1.2.8 Beispiele
• Die Funktion f (z) = z 2 (z ∈ C) hat die komplexe Ableitung
f ′ (z) = 2z. Es ist also f ′ (x + iy) = (2x)+ i(2y). Die f entsprechende reelle
x2 − y 2
, hat an der Stelle (x, y)
Abbildung F , gegeben durch F (x, y) =
2xy
die Jacobimatrix
2x −2y
.
2y 2x
Die Einträge in der ersten Spalte der Jacobimatrix stimmen also wie erwartet
mit dem Real- bzw. Imaginärteil von f ′ überein.
• Die komplexe Konjugation C → C, z 7→ z ist zwar überall reell differenzierbar.
Denn die entsprechende reelle Abbildung von R2 nach R2 ist die Spiegelung
an der reellen Achse. Da es sich bereits um eine lineare Abbildung handelt,
stimmt das Differential anjeder Stelle
mit dieser Spiegelung überein. Die ent1 0
sprechende Matrix lautet
, es ist also keine Drehstreckung! Deshalb
0 −1
lässt sich das Differential nicht als Multiplikation mit einer komplexen Zahl
auffassen. Und, wie oben bereits auf andere Weise gezeigt, ist die komplexe
Konjugation ja auch an keiner Stelle komplex differentierbar.
Wir können die Drehstreckungen auch als diejenigen linearen Abbildungen von
R nach R2 charakterisieren, die winkeltreu und orientierungserhaltend sind (siehe
Übungsaufgabe). Daraus ergibt sich folgende Umformulierung des Satzes:
2
1.2.9 Folgerung Die Funktion f : G → C ist genau dann im Punkt z0 = x0 +iy0 ∈
G komplex differenzierbar, wenn die entsprechende Abbildung F : D → R2 im Punkt
(x0 , y0 ) reell differenzierbar ist und das Differential DF(x0 ,y0 ) von F an der Stelle
(x0 , y0 ) winkeltreu und orientierungserhaltend oder die Nullabbildung ist.
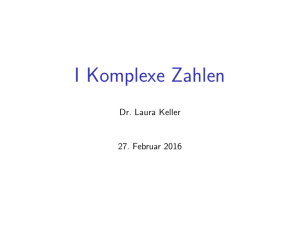
Ist f auf G holomorph und f ′ (z) 6= 0 für alle z ∈ G, so nennt man deshalb f
auch lokal konform. Das bedeutet genauer folgendes: Sind γ1 und γ2 parametrisierte
Kurven im Gebiet G, die sich im Punkt z0 unter dem Winkel α schneiden, so werden
sie von f in ein Kurvenpaar überführt, das sich im Punkt f (z0 ) ebenfalls unter dem
Winkel α schneidet.
γ1
z0
b
α
γ2
f
f (z0 )
b
α
f (γ1 )
f (γ2 )
Beweis. Denn ist γj : (−ǫ, ǫ) → G mit γj (0) = z0 , folgt aus der Kettenregel
d
(F (γj (t)) = DFz0 (γ̇j (0)) .
dt
t=0
12
Kapitel 1. Differential- und Integralrechnung im Komplexen
Das Differential DFz0 bildet also den Tangentialvektor der Kurve γj bei z0 auf den
Tangentialvektor der Kurve f ◦ γj an der Stelle f (z0 ) ab. q.e.d.
Bezeichnen wieder u und v den Realteil bzw. den Imaginärteil von f , und verwenden wir für die partiellen Ableitung von u die Schreibweise ux := ∂u
, uy := ∂u
∂x
∂y
(und entsprechend für v), so lautet die Jacobimatrix von F an der Stelle (x0 , y0 ):
ux (x0 , y0 ) uy (x0 , y0 )
JF (x0 , y0 ) =
.
vx (x0 , y0 ) vy (x0 , y0 )
Das Differential DFx0 ,y0 ist also genau dann eine Drehstreckung (oder die Nullmatrix), wenn
ux (x0 , y0 ) = vy (x0 , y0 ) und uy (x0 , y0) = −vx (x0 , y0) .
Diese Beobachtung liefert folgendes Kriterium:
1.2.10 Satz Eine Funktion f : G → C ist genau dann holomorph auf G, wenn die
entsprechende Abbildung F : D → R2 auf ganz D reell differenzierbar ist und die
sogenannten Cauchy-Riemannschen Differentialgleichungen erfüllt sind, nämlich:
ux = vy
und uy = −vx
auf ganz D.
Ist dies der Fall, so ist f ′ (x + iy) = ux (x, y) + ivx (x, y) für alle x + iy ∈ G.
Wenden wir dies Kriterium nun an, um die Ableitung der komplexen Exponentialfunktion zu bestimmen.
1.2.11 Beispiel Die komplexe Exponentialfunktion ist gegeben durch ez = ex eiy
für z = x + iy. Hier lautet also der Realteil u(x, y) = ex cos(y) und der Imaginärteil
v(x, y) = ex sin(y). Die partiellen Ableitungen sind ux (x, y) = ex cos(y) = u(x, y),
uy (x, y) = −ex sin(y), vx (x, y) = ex sin(y) = v(x, y), vy (x, y) = ex cos(y). Also sind
die Cauchy-Riemannschen Differentialgleichungen hier erfüllt, und die komplexe Exponentialfunktion ist holomorph. Ausserdem stimmt die Ableitung der komplexen
Exponentialfunktion (wie schon im reellen Fall) mit sich selbst überein.
Hier sind noch zwei weitere Beispiele:
1.2.12 Beispiele Die Funktion f : C → C, definiert durch f (x+iy) = (x2 −y 2 +x)+
i(y+2xy) hat den Realteil u(x, y) = x2 −y 2 +x und den Imaginärteil v(x, y) = y+2xy.
Berechnet man die partiellen Ableitungen von u und v erhält man
ux (x, y) = 2x + 1 = vy (x, y) und uy (x, y) = −2y = −vx (x, y) .
Die Cauchy-Riemannschen Differentialgleichungen sind also erfüllt und das heisst,
f ist holomorph. Ausserdem ist f ′ (x + iy) = ux (x, y) + ivx (x, y) = 1 + 2x + i2y.
Man hätte dies auch direkt sehen können, denn tatsächlich ist f (z) = z + z 2 , also
holomorph mit f ′ (z) = 1 + 2z.
1.2. Komplexe Differenzierbarkeit
13
Die Funktion g: C → C mit Realteil u(x, y) = x2 − y 2 + x und Imaginärteil
v(x, y) = 2xy − y ist dagegen nicht holomorph, denn hier gilt ux (x, y) = 2x + 1 6=
vy (x, y) = 2x − 1. Die Cauchy-Riemann-Bedingung ist also sogar an keiner einzigen
Stelle des Definitionsbereiches erfüllt.
Wir können ausserdem festhalten, dass eine holomorphe Funktion durch ihren Realteil bereits bis auf Konstante eindeutig festgelegt ist. Denn der dazu passende Imaginärteil muss ja dann die Cauchy-Riemannschen Differentialgleichungen
erfüllen.
1.2.13 Beispiel Nehmen wir an, der Realteil u(x, y) = xy + 2x für (x, y) ∈ R2 sei
vorgegeben und v bezeichne einen dazu passenden Imaginärteil, so dass u + iv = f
holomorph ist. Versuchen wir v aus u zu rekonstruieren. Es muss gelten
ux (x, y) = y + 2 = vy (x, y) .
Daraus ergibt sich durch Integration über y:
Z
Z
y2
v(x, y) = vy (x, y)dy + C(x) = (y + 2)dy + C(x) =
+ 2y + C(x) ,
2
wobei C: R → R eine Funktion ist, die nur von x abhängt. Setzt man nun in die
zweite Cauchy-Riemann-Gleichung ein, erhält man die Bedingung:
−uy (x, y) = −x = vx (x, y) = C ′ (x) .
R
2
Also ist C(x) = − x dx + c = − x2 + c für eine geeignete Konstante c ∈ R. Das
bedeutet:
x2
y2
+ 2y −
+ c.
v(x, y) =
2
2
Die sich daraus ergebende Funktion
f (x + iy) = xy + 2x + i(
y 2 − x2
+ 2y + c) (c ∈ R konstant)
2
ist nach Konstruktion tatsächlich holomorph.
1.2.14 Bemerkung Eine Funktion u ∈ C 2 (G) kommt nur dann als Realteil einer
holomorphen Funktion auf G in Frage, wenn gilt ∆u = 0.
Wie wir gesehen haben, lässt sich die Exponentialfunktion vom Reellen ins Komplexe fortsetzen. Auch die trigonometrischen Funktionen haben komplexe Entsprechungen, die man mithilfe der Exponentialfunktion definieren kann, indem man festsetzt:
1
cos(z) := (eiz + e−iz ) und
2
sin(z) :=
1 iz
(e − e−iz ) für z ∈ C.
2i
Real- und Imaginärteil der komplexen Cosinusfunktion lauten Re cos(x + iy) =
cos(x) cosh(y) und Im cos(x + iy) = − sin(x) sinh(y).
14
Kapitel 1. Differential- und Integralrechnung im Komplexen
Die so definierten komplexen Funktionen sind holomorph und es gilt:
d
sin(z) = cos(z),
dz
d
cos(z) = − sin(z) für z ∈ C.
dz
Ausserdem bleiben die bekannten Identitäten auch im Komplexen gültig. Zum Beispiel kann man durch Nachrechnen überprüfen, dass
sin2 (z) + cos2 (z) = 1 für alle z ∈ C.
Kommen wir nun noch einmal auf Polynomfunktionen zurück. Sei p eine Polynomfunktion von Grad n > 1 der Form p(z) = z n + an−1 z n−1 + . . . + a1 z + a0 . Dann
gilt wie schon bemerkt:
p′ (z) = nz n−1 + an−1 (n − 1)z n−2 + . . . + a1 .
Die Ableitung p′ ist also eine Polynomfunktion von Grad n − 1. In der reellen Situation sagt der Satz von Rolle, dass zwischen je zwei benachbarten Nullstellen eines
Polynoms mindestens eine Nullstelle der Ableitung des Polynoms zu finden ist. Die
komplexe Entsprechung dieser Aussage lautet folgendermassen:
1.2.15 Satz Seien z1 , . . . , zn die komplexen Nullstellen des Polynoms p, und bezeichne K die konvexe Hülle von z1 , . . . , zn , das heisst
K := {
n
X
j=1
tj zj | tj ∈ R≥0 ,
n
X
tj = 1} .
j=1
Dann liegt jede Nullstelle des Polynoms p′ in K.
1.2.16 Beispiele
• Ist p(z) = z n − 1, so sind die Nullstellen von p gerade die
n-ten Einheitswurzeln und ihre konvexe Hülle K ist ein regelmässiges n-Eck
in der komplexen Ebene mit dem Nullpunkt im Zentrum. Die Ableitung von
p lautet p′ (z) = nz n−1 , hat also 0 als (n − 1)-fache Nullstelle. Also liegt hier
die Nullstelle von p′ sogar im Zentrum von K.
• Sei jetzt p(z) = (z 2 − 1)(z − i) = z 3 − iz 2 − z + i. Die Nullstellen −1, 1, i von
p erzeugen ein rechtwinkliges Dreieck K in der komplexen Ebene. Man
√ kann
1
′
2
ausrechnen, dass p (z) = 3z − 2iz − 1 die Nullstellen z1 = 3 (i + 2) und
√
z2 = 13 (i − 2) hat. Diese beiden Punkte befinden sich tatsächlich im Innern
des Dreiecks.
Hier nun die Begündung des Satzes:
Beweis. Nehmen wir an, mindestens eine Nullstelle z0 von p′ liege nicht in der konvexen Hülle K der Nullstellen von p, sondern ausserhalb. Weil die Menge K kompakt
ist, gibt es einen Punkt w auf dem Rand von K, in dem der Abstand zu z0 minimal
−w
wird. Die komplexe Zahl v := |zz00 −w|
entspricht demjenigen Vektor in R2 , der von w
aus in Richtung von z0 zeigt und Länge 1 hat. Sei jetzt ǫ > 0 klein genug gewählt,
1.3. Umkehrfunktionen
15
so dass z0 − ǫv noch ausserhalb von K ist, und schauen wir uns folgende Funktion
an:
g: (−ǫ, ǫ) → R>0 , g(t) = |p(z0 + tv)| .
Weil |p(z)| = |z − z1 | · |z − z2 | . . . |z − zn | ist, gibt g(t) das Produkt der Abstände
von z0 + tv zu den Punkten z1 , . . . , zn an. Mit wachsendem t entfernen wir uns von
der Menge K, die Funktion g ist also monoton wachsend. Daraus folgt g ′ (0) > 0.
Andererseits können wir die Ableitung von g mit der Kettenregel berechnen. Denn
g ist zusammengesetzt aus der Abbildung g1 : t 7→ z0 + tv ∈ R2 , der Abbildung
P : R2 → R2 , die der komplexen Polynomfunktion p entspricht, und schliesslich der
Längenfunktion g2 = | · |: R2 → R. Weil p′ (z0 ) = 0 ist, muss die Jacobimatrix von P
an der Stelle z0 die Nullmatrix sein. Aus der Kettenregel folgt jetzt:
g ′(0) = Dg2 · DPz0 · v = 0 .
Dies ist aber ein Widerspruch.
1.3
q.e.d.
Umkehrfunktionen
Das Ziel dieses Abschnitts ist es, die aus der Differentialrechnung reellwertiger Funktionen in einer reellen Variablen bekannte Regel für Umkehrfunktionen auf die komplexe Situation zu übertragen. Gehen wir dazu aus von einer holomorphen Funktion
f : G → C, definiert auf einem Gebiet G in C und nehmen wir zusätzlich an, f ′ sei
stetig. (Wie sich zeigen wird, ist dies für jede holomorphe Funktion f automatisch
der Fall.) Sei weiter z0 = x0 + iy0 ein Punkt im Gebiet G mit f ′ (z0 ) 6= 0. Für die
f entsprechende reelle Funktion F : D = {(x, y) ∈ R2 | x + iy ∈ G} → R2 bedeutet
das:
det DF(x0 ,y0 ) = u2x (x0 , y0 ) + vx2 (x0 , y0 ) = |f ′(z0 )|2 6= 0 .
Das Differential von F an der Stelle (x0 , y0 ) ist also invertierbar. Wir können deshalb
den Satz über die Umkehrbarkeit reeller Abbildungen in mehreren Variablen anwenden und schliessen, dass F in der Nähe des Punktes (x0 , y0) umkehrbar ist. Genauer
gibt es eine offene Teilmenge (x0 , y0 ) ∈ U ⊂ D derart dass F : U → F (U) =: V
bijektiv, V ⊂ R2 offen und F −1 : V → U wiederum reell differenzierbar ist. Durch
eventuelle Verkleinerung können wir ausserdem erreichen, dass U und V zusammenhängend sind. Das Differential der Umkehrabbildung F −1 erhält man durch
Invertieren des Differentials von F an der passenden Stelle. Ist nämlich p = (x, y)
und F (p) = q, so ist
D(F −1)q = (DFp )−1 .
Für die ursprüngliche komplexe Funktion f bedeutet das: Auch f ist lokal invertierbar. Fassen wir U und V jetzt als Gebiete in C auf und schränken wir f auf U ein,
erhalten wir eine bijektive Funktion f : U → V , deren Umkehrfunktion f −1 : V → U
der reellen Abbildung F −1 entspricht. Nun ist F −1 , wie schon gesagt, reell differenzierbar, und sein Differential ergibt sich durch Invertieren des Differentials von F .
Da f holomorph ist, ist DFp an jeder Stelle p eine Drehstreckung. Nun ist aber auch
16
Kapitel 1. Differential- und Integralrechnung im Komplexen
das Inverse einer Drehstreckung wieder von diesem Typ. Deshalb muss auch f −1
holomorph sein. Um die komplexe Ableitung der Umkehrfunktion f −1 abzulesen,
schauen wir uns (DFp )−1 noch einmal genauer an:
(DFp )
−1
=
ux (p) −vx (p)
vx (p) ux (p)
−1
1
= 2
ux + vx2
ux (p) vx (p)
−vx (p) ux (p)
.
Diese Drehstreckungsmatrix entspricht der komplexen Zahl
f ′ (z)
1
1
(u
(p)
−
iv
(p))
=
= ′
,
x
x
2
2
′
2
ux + vx
|f (z)|
f (z)
wenn z ∈ C dem Punkt p ∈ R2 entspricht. Das Resultat dieser Überlegungen ist im
folgenden Satz zusammengefasst:
1.3.1 Satz Sei f : G → C holomorph, f ′ stetig und f ′ (z0 ) 6= 0 für ein z0 ∈ G. Sei
weiter f (z0 ) = w0 . Dann existieren Gebiete U, V mit z0 ∈ U ⊂ G und w0 ∈ V =
f (U), so dass f : U → V bijektiv ist und die Umkehrfunktion f −1 : V → U wiederum
holomorph ist, wobei
d −1
1
f (w) = ′ −1
dw
f (f (w))
für alle w ∈ V .
1.3.2 Beispiele
1. Die komplexe Exponentialfunktion exp: C → C∗ ist überall
lokal umkehrbar, denn exp′ (z) = exp(z) 6= 0 für alle z ∈ C. Das bedeutet, man
kann von jeder komplexen Zahl 6= 0, auch den negativen reellen Zahlen, einen
komplexen Logarithmus bilden. Aber dieser Logarithmus ist nicht eindeutig.
Wählen wir etwa konkret w0 = −1, so gibt es die folgenden Kandidaten zk :=
i(π + k2π) (k ∈ Z). All diese Zahlen auf der imaginären Achse werden durch
die Exponentialfunktion auf w0 abgebildet, denn
ezk = ei(π+k2π) = −1 für alle k ∈ Z.
Zu jeder dieser Kandidaten gibt es eine lokale Umkehrfunktion der Exponentialfunktion auf V := {reiϕ ∈ C | r > 0, 0 < ϕ < 2π}, man spricht hier von
Zweigen des komplexen Logarithmus:
V → Uk := {z ∈ C | k2π < Im(z) < (k + 1)2π},
lnk :
(k ∈ Z) .
reiϕ 7→ ln(r) + i(ϕ + k2π)
Es ist jeweils lnk (w0 ) = zk . All diese Zweige des Logarithmus sind komplex
differenzierbar und es gilt:
d
1
1
lnk (w) = ln (w) =
k
dw
e
w
für alle w ∈ V .
2. Betrachten wir die Funktion f , gegeben durch f (z) = z 2 , nur auf C∗ := C\{0}.
Dann ist die Ableitung stets ungleich Null, f also überall lokal umkehrbar.
1.3. Umkehrfunktionen
17
√
Zum Beispiel√hat die Zahl w0 = −2 die beiden komplexen Wurzeln z1 = i 2
und z2 = −i 2. Entsprechend gibt es zwei lokale Quadratwurzelfunktionen,
definiert auf der Umgebung V := {reiϕ ∈ C | r > 0, 0 < ϕ < 2π} von w0 ,
nämlich:
V → U1 :=√{reiϕ ∈ C | r > 0, 0 < ϕ < π},
ϕ
wobei g1 (w0 ) = z1 ,
g1 :
g1 (reiϕ ) = rei 2 ,
und
g2 :
V → U2 :=√{reiϕ ∈ C | r > 0, π < ϕ < 2π},
ϕ
g2 (reiϕ ) = rei( 2 +π) ,
wobei g2 (w0 ) = z2 .
Die Ableitungen lauten hier:
1
1
d
gk (w) = ′
=
dw
f (gk (w))
2gk (w)
für alle w ∈ V , k = 1, 2.
3. Sei jetzt n eine fest gewählte natürliche Zahl und f (z) = z n für z ∈ C∗ . Hier hat
jede Zahl w ∈ C∗ genau n verschiedene n-te Wurzeln und das führt zu n lokalen
π
Wurzelfunktionen. Für n = 3 und w = −i = e−i 2 zum Beispiel haben wir die
π
7π
drei dritten Wurzeln z1 = e−i 6 , z2 = i und z3 = ei 6 . Die entsprechenden
< ϕ < π2 }
Zweige der dritten Wurzelfunktion auf V := {reiϕ ∈ C | r > 0, − 3π
2
lauten:
√ ϕ
π
π
g1 : V → U1 := {reiϕ ∈ C | r > 0, − < ϕ < }, g1 (reiϕ ) = 3 rei 3 ,
2
6
√ ϕ+2π
π
5π
<ϕ<
}, g2 (reiϕ ) = 3 rei 3 ,
6
6
√ ϕ+4π
5π
3π
∈ C | r > 0,
<ϕ<
}, g2 (reiϕ ) = 3 rei 3 .
6
2
g2 : V → U2 := {reiϕ ∈ C | r > 0,
g3 : V → U3 := {reiϕ
Die Ableitungen sind:
d
1
1
gk (w) = ′
=
dw
f (gk (w))
3(gk (w))2
für alle w ∈ V , k = 1, 2, 3.