§1 Taylorpolynome und Taylorreihen
Werbung

Mathematik für Physiker II, SS 2015
Freitag 17.4
$Id: taylor.tex,v 1.4 2015/04/17 12:45:09 hk Exp $
$Id: integral.tex,v 1.33 2015/04/17 12:54:26 hk Exp $
§1
Taylorpolynome und Taylorreihen
1.2
Taylorreihen
Zum Abschluß dieses einleitenden Kapitels wollen wir noch kurz die sogenannte Taylorreihe behandeln. In der Taylorformel in der Form des I.§12.Satz 16 betrachtet man
ein Taylorpolynom
n
X
f (k) (x0 )
(x − x0 )k
Tn (x) =
k!
k=0
zur Approximation einer geeigneten gegebenen Funktion f , wobei x0 der Entwicklungspunkt und n die Ordnung der Entwicklung sind. Der Approximationsfehler war dann
als
f (n+1) (ξ)
(x − x0 )n+1
f (x) − Tn (x) =
(n + 1)!
für ein ξ zwischen x0 und x gegeben. Die Taylorreihe entsteht indem wir zu unendlicher
Ordnung übergehen, also das Taylorpolynom durch die Potenzreihe
T (x) :=
∞
X
f (n) (x0 )
n=0
k!
(x − x0 )n
ersetzen, dies ist dann die sogenannte Taylorreihe von f zum Entwicklungspunkt x0 .
In günstigen Fällen stimmt die Taylorreihe für Argumente x ausreichend nahe beim
Entwicklungspunkt x0 mit der Funktion f überein. Damit die Taylorreihe überhaupt
definiert ist muss die Funktion f unendlich oft differenzierbar sein, aber dies reicht
nicht aus um die Gleichheit von f und T sicherzustellen. Beispielsweise kann man sich
überlegen, dass die Funktion
(
2
e−1/x , x 6= 0,
f : R → R; x 7→
0,
x=0
unendlich oft differenzierbar mit f (n) (0) = 0 für alle n ∈ N ist, die Taylorreihe von f
zum Entwicklungspunkt x0 = 0 ist also T (x) = 0 und stimmt bis auf x = 0 nirgends
mit f überein.
Wir schauen uns nun einige Beispiele von Taylorreihen an und beginnen mit der
sogenannten binomischen Reihe, die oft auch als Newtonsche Reihe bezeichnet wird.
Sei α ∈ R und betrachte die Potenzfunktion
fα : (−1, 1) → R; x 7→ (1 + x)α .
2-1
Mathematik für Physiker II, SS 2015
Freitag 17.4
Wir wollen ihre Taylorreihe T zum Entwicklungspunkt x0 = 0 berechnen. Für jedes
n ∈ N ist die n-te Ableitung von fα offenbar als
fα(n) (x) = α · (α − 1) · . . . · (α − n + 1)(1 + x)α−n
gegeben. Für n = 0 müssen wir dieses leere Produkt wie üblich als 1 interpretieren.
Als Koeffizienten unserer Taylorreihe ergeben sich
(n)
fα (0)
α · . . . · (α − n + 1)
=
.
n!
n!
Es ist üblich für diese Zahlen eine spezielle Notation einzuführen. Für n, m ∈ N mit
n ≤ m haben wir
m
m!
m(m − 1) . . . (m − n + 1)
=
=
,
n
n!(m − n)!
n!
und dies legt es nahe für alle n ∈ N und beliebiges α ∈ R den verallgemeinerten
Binomialkoeffizienten
α
α · . . . · (α − n + 1)
:=
n
n!
einzuführen. Für n = 0 soll dies, wie schon bemerkt, gleich Eins sein. Für α ∈ N
stimmen die verallgemeinerten Binomialkoeffizienten im Fall n ≤ α mit dem üblichen
Binomialkoeffizienten überein, und im Fall α < n wird der Ausdruck zu Null. Die
Taylorreihe von fα schreibt sich damit als
∞ X
α n
T (x) =
x
n
n=0
und wir behaupten das für jedes x ∈ (0, 1) stets fα (x) = T (x) gilt. Sei also x ∈ R mit
0 < x < 1 gegeben. Für jedes n ∈ N gibt es nach dem Satz von Taylor I.§12.Satz 16
ein ξn mit 0 < ξn < x < 1 und
n X
α k f (n+1) (ξn ) n+1
α
x =
fα (x) −
x
=
(1 + ξn )α−(n+1) xn+1 .
k
(n
+
1)!
n
+
1
k=0
Wähle y ∈ R mit x < y < 1 und ein n0 ∈ N mit n0 ≥ 1 und
y
α+1
<
0< 1−
n
x
für alle n ∈ N mit n ≥ n0 . Für jedes n ∈ N mit n ≥ n0 haben wir dann auch
n+1 Y
n n
X
α α
α
+
1
x
k
α
(1 + ξn )
x = 1−
fα (x) −
k
n
1 + ξn
k
0
k=0
k=n0 +1
n
Y
α α α+1
(1 + ξn )α xy n ,
(1 + ξn )α xn0 +1
≤ x
·
1
−
≤
k
n0
n0 k=n +1
0
2-2
Mathematik für Physiker II, SS 2015
Freitag 17.4
und 1 < 1 + ξn < 2, es gibt also eine Konstante C ≥ 0 mit
n X
α k
x ≤ Cy n
fα (x) −
k
k=0
für alle n ∈ N mit n ≥ n0 , nämlich
2α α · x, α ≥ 0,
n
C := α 0
· x,
α < 0.
n0 Wegen 0 < y < 1 ist (y n )n∈N −→ 0 und somit ist
T (x) =
∞ X
α
n=0
n
xn = fα (x) = (1 + x)α .
wie behauptet. Tatsächlich gilt diese Gleichung auch für x ∈ R mit −1 < x < 0,
allerdings ist unsere Darstellung des Approximationsfehlers in der Taylorformel nicht
gut geeignet dies einzusehen. Daher werden wir dies mit einem indirekten Argument
nachweisen das keine explizite Abschätzung des Approximationsfehlers benötigt. Wir
wissen das die Potenzreihe
∞ X
α n
T (x) =
x
n
n=0
für 0 < x < 1 konvergiert, sie hat also nach I.§11.Lemma 16.(a) einen Konvergenzradius
r ≥ 1. Nach I.§12.Satz 5 ist T : (−1, 1) → R damit eine differenzierbare Funktion mit
∞
X
α
T (x) =
(n + 1) ·
xn
n
+
1
n=0
0
für alle x ∈ (−1, 1). Für alle x ∈ (−1, 1) ist somit auch
∞
X
α
α
n
(1 + x)T (x) =
(n + 1)
x +
(n + 1) ·
xn+1
n
+
1
n
+
1
n=0
n=0
X
∞ α
α
α
=
+
(n + 1)
+n
xn ,
1
n
+
1
n
n=1
0
∞
X
und verwenden wir das für jedes n ∈ N mit n ≥ 1 stets
α
α
α · . . . · (α − n + 1) · (α − n)
α · . . . · (α − n + 1)
(n + 1)
+n
=
+n·
n+1
n
n!
n!
α
α
= (α − n + n)
=α
n
n
2-3
Mathematik für Physiker II, SS 2015
Freitag 17.4
gilt, so wird dies zu
∞
X
α n
(1 + x)T (x) = α +
α
x = αT (x)
n
n=1
0
für alle x ∈ (−1, 1). Die Hilfsfunktion
h : (−1, 1) → R; x 7→ T (x)(1 + x)−α
erfüllt also
h0 (x) = T 0 (x)(1 + x)−α − αT (x)(1 + x)−(α+1) = ((1 + x)T 0 (x) − αT (x))(1 + x)−(α+1) = 0
für jedes x ∈ (−1, 1), ist also nach Lemma 1 konstant. Wegen h(0) = 1 ist damit für
jedes x ∈ (−1, 1) stets h(x) = 1, d.h. T (x) = (1 + x)α . Damit haben wir
α
(1 + x) =
∞ X
α
n=0
n
xn
für |x| < 1
gezeigt. Als ein konkretes Beispiel ist etwa
√
1/2
1 + x = (1 + x)
=
∞ X
1/2
n=0
n
xn
für alle x ∈ (−1, 1). Für jedes n ∈ N mit n ≥ 1 ist dabei
1/2
=
n
− 1 · . . . · 21 − (n − 1)
(1 − 2) · (1 − 4) · . . . · (1 − 2(n − 1))
=
n!
2n · n!
(2n − 2)!
1 · 3 · . . . · (2n − 3)
= (−1)n−1 n n−1
= (−1)n−1
n
2 · n!
2 ·2
· n! · (n − 1)!
(2n)!
,
= (−1)n−1 n
4 · (2n − 1) · n!2
1
2
·
1
2
und dies gilt auch im Fall n = 0. Damit haben wir
√
1+x=
∞
X
n=0
(−1)n+1
(2n)!
für |x| < 1.
4n · (2n − 1) · n!2
Auch die Berechnung der Taylorreihe ist oftmals möglich ohne explizit Ableitungen der
Funktion zu bestimmen. Um dies einzusehen, beginnen wir mit einer kleinen Vorüberlegung. Angenommen wir haben einen Entwicklungspunkt x0 ∈ R und eine reelle Potenzreihe
∞
X
f (x) =
an (x − x0 )n
n=0
2-4
Mathematik für Physiker II, SS 2015
Freitag 17.4
mit positiven Konvergenzradius r > 0. Nach I.§12.Satz 5 ist f auf dem Konvergenzintervall I := (x0 − r, x0 + r) differenzierbar mit der Ableitung
0
f (x) =
∞
X
(n + 1)an+1 (x − x0 )n
n=0
für alle x ∈ I und diese hat wieder den Konvergenzradius r. Wenden wir dies ein
weiteres Mal an, so ergibt sich das f auch zweifach differenzierbar mit der zweiten
Ableitung
∞
X
f 00 (x) =
(n + 1)(n + 2)an+2 (x − x0 )n
n=0
für alle x ∈ I ist und diese hat ebenfalls Konvergenzradius r. Iterierte Anwendung
dieser Überlegung liefert das f unendlich oft differenzierbar ist und für alle k ∈ N und
alle x ∈ I ist die k-te Ableitung von f in x durch die Potenzreihe
f
(k)
(x) =
∞
X
n
(n + 1) · . . . · · · (n + k)an+k (x − x0 ) =
n=0
∞
X
(n + k)!
n=0
n!
an+k (x − x0 )n
mit dem Konvergenzradius r gegeben. Insbesondere gilt für jedes k ∈ N stets f (k) (x0 ) =
k! · ak , d.h. die Taylorreihe von f im Entwicklungspunkt x0 ist f selbst.
Wir betrachten nun den Arcustangens. Wir wissen das dieser differenzierbar mit
der Ableitung
1
d
arctan x =
dx
1 + x2
für alle x ∈ R ist. Diese Ableitung können wir als geometrische Reihe schreiben, für
jedes x ∈ R mit |x| < 1 ist auch | − x2 | < 1 also wird
∞
X
1
=
(−1)n x2n .
2
1+x
n=0
Wie gerade festgestellt ist diese Funktion unendlich oft differenzierbar und gleich ihrer
Taylorreihe im Entwicklungspunkt x0 = 0. Damit ist auch der Arcustangens unendlich
oft differenzierbar und für jedes n ∈ N mit n ≥ 1 haben wir
(
(−1)(n−1)/2 (n − 1)!, n ist ungerade,
dn dn−1 1
=
arctan
x
=
dxn x=0
dxn−1 x=0 1 + x2
0,
sonst.
Die Taylorreihe des Arcustangens wird damit zu
T (x) =
∞
X
(−1)n 2n+1
x
2n
+
1
n=0
2-5
Mathematik für Physiker II, SS 2015
Freitag 17.4
mit dem Konvergenzradius 1. Wir behaupten das diese Potenzreihe auf ihrem Konvergenzkreis mit dem Arcustangens übereinstimmt. Hierzu betrachte die Differenz
arctan −T . Diese ist in (−1, 1) differenzierbar mit
∞
X
d
1
(arctan x − T (x)) =
−
(−1)n x2n = 0
dx
1 + x2 n=0
für alle x ∈ (−1, 1), also ist die Funktion arctan −T nach Lemma 1 konstant. Andererseits ist sie im Entwicklungspunkt x0 = 0 gleich Null, also arctan −T = 0 und es
folgt
∞
X
(−1)n 2n+1
arctan x =
x
2n + 1
n=0
für alle x ∈ R mit |x| < 1.
§2
Integralrechnung
In diesem Kapitel wollen wir die Integration reeller Funktionen f : [a, b] → R besprechen. Es gibt verschiedene Möglichkeiten den Integralbegriff informell einzuführen. Die
wohl wichtigste dieser Möglichkeiten ist die Interpretation des Integrals als eine kon”
tinuierliche
R Summe“. Aus dieser Richtung kommt auch das für Integrale verwendete
Symbol “ das sich aus einem gestreckt geschriebenen S“ für Summe“ entwickelt
”
”
”
hat. Das Urbeispiel für unsere kontinuierlichen Summen“ ist der Begriff der Arbeit.
”
Wir denken uns ein sich bewegendes Objekt auf das zum Zeitpunkt t eine Kraft F (t)
wirkt. Da wir nur reellwertige Funktionen behandeln wollen, nehmen wir an das diese
Kraft immer dieselbe Richtung hat und daher als Zahl interpretiert werden kann. Außerdem nehmen wir der Einfachheit halber an, dass das Objekt sich mit konstanter,
zu Eins normierter, Geschwindigkeit bewegt, so das wir keinen Unterschied zwischen
Zeitabschnitten und in diesen zurückgelegten Wegstücken machen müssen. Die von der
wirkenden Kraft geleistete Arbeit von einem Zeitpunkt t = a bis zu einem Zeitpunkt
t = b, beziehungsweise genauer längs des in diesem Zeitabschnitt zurückgelegten Wegs,
ist dann die Summe“ über die F (t) für a ≤ t ≤ b. Dies ist keine Reihensumme im
”
Sinne des I.§5 des letzten Semesters, auf der mathematischen Seite brauchen wir also
eine neue Definition.
Wir diskutieren zunächst einmal die anzustellende heuristische Überlegung. Schauen wir uns erst einmal den einfachsten Fall an, dass die wirkende Kraft F (t) = F
konstant ist. Die Arbeit ist dann einfach
W = Kraft · zurückgelegte Strecke,
also W = F · (b − a) da wir zwischen Zeitabschnitten und Strecken keinen Unterschied
machen wollten.
2-6
Mathematik für Physiker II, SS 2015
Freitag 17.4
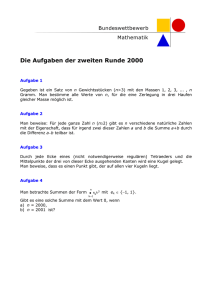
F(t)
Den allgemeinen Fall einer sich zeitlich ändernt=b
den Kraft wollen wir auf diesen einfachen Fall
zurückführen“. Zu diesem Zweck denken wir uns
”
das Zeitintervall von a bis b in kleine Teilstücke
t
[a, t1 ], [t1 , t2 ], [t2 , t3 ], . . ., [tn−1 , b] zerteilt, also a =:
t0 < t1 < t2 < . . . < tn−1 < tn := b. Auf jedem dieser Teilabschnitte [ti−1 , ti ] approximieren
t=a
wir die wirkende Kraft durch einen Mittelwert“
”
Fi , und tun so als würde längs [ti−1 , ti ] konstant
diese Kraft Fi wirken. Dieses Teilstückchen trägt dann zur Arbeit den Anteil Fi (ti −ti−1 )
bei, und durch Summation über alle Teilstücke erhalten wir eine Näherung
W ≈
n
X
Fi (ti − ti−1 )
i=1
der Arbeit W . Führen wir jetzt in irgendeinem Sinne den Grenzwert nach immer
R b feiner
werden Zerteilungen durch, so sollten diese Näherung gegen die Arbeit W = a F (t) dt
konvergieren. Wir werden das Integral durch eine etwas formalere Version dieser Überlegung definieren.
Zuvor schauen wir uns aber noch eine alternative Interpretation des Integrals an. In
der Näherungssumme für W können wir jeden Summanden Fi (ti − ti−1 ) als die Fläche
des Rechtecks der Breite ti −ti−1 und der Höhe Fi interpretieren. Damit wird die Fläche
im Fall Fi < 0 mit einem Vorzeichen versehen.
Beim Grenzübergang zu immer feineren Zerteilungen entsteht dann die Fläche unterhalb des Graphen von F . Dabei werden unter der x-Achse liegende Teile der Fläche
negativ gezählt. Eine weitere hiermit verwandte Interpretation des Integrals ist es Integration als Mittelung P
zu interpretieren. Das arithmetische Mittel von Zahlen a1 , . . . , an
ist bekanntlich (1/n) nk=1 ak und beim Übergang zu kontinuierlichen Summen wird
Z b
1
F (t) dt
b−a a
zum Mittel der Funktion F über das Intervall [a, b]. Die Interpretation des Integral als
einer Fläche ist für unsere Zwecke nicht weiter wichtig, historisch war sie aber eine der
2-7
Mathematik für Physiker II, SS 2015
Freitag 17.4
Motivationen zur Einführung des Integrals. Es gab auch noch eine zweite Grundmotivation eher rechnerischer Natur. Das Integral löst die einfachste Differentialgleichung
y 0 (t) = f (t) erster Ordnung deren rechte
R t Seite nicht von y abhängt, die Lösung der
Gleichung mit y(a) = b ist y(t) = b + a f (s) ds. Tatsächlich wird auch die Lösung
allgemeinerer Differentialgleichungen oftmals als deren Integration bezeichnet. Als eine
Folgerung ergibt sich die Berechnung von Integralen über Stammfunktionen, die sich
dann natürlich als die wichtigste Methode hierfür herausstellt. Trotzdem sollte man
sich Stammfunktionen nicht als Bestandteil der Definition des Integrals vorstellen, sie
dienen zur Berechnung von Integralen aber nicht dazu zu sagen was Integrale sind.
2.1
Das Rieman Integral
Es gibt eine ganze Reihe verschiedener Integralbegriffe, diese unterscheiden sich nicht
in den Werten von Integralen sondern darin welche Funktionen überhaupt integrierbar
sind. Wir wollen hier das sogenannte Rieman Integral diskutieren, da dieses recht nahe
an der Idee zerteilen und Grenzwert nach immer feineren Zerteilungen bilden“ liegt.
”
Wir beginnen mit einigen Grunddefinitionen.
Definition 2.1 (Zerlegungen eines Intervalls)
Seien a, b ∈ R mit a < b. Eine Zerlegung von [a, b] ist ein Tupel α = (t0 , t1 , . . . , tn )
reeller Zahlen mit a = t0 < t1 < . . . < tn = b. Meist schreiben wir Zerlegungen nicht als
Tupel, sondern in der Form a = t0 < . . . < tn = b“. Die Zahl n nennen wir die Anzahl
”
der Teilintervalle der Zerlegung und für 1 ≤ i ≤ n ist [ti−1 , ti ] das i-te Teilintervall der
Zerlegung. Schließlich heißt die Zahl
δ(α) := max (ti − ti−1 ),
1≤i≤n
d.h. die maximale Länge eines Teilintervalls der Zerlegung, die Feinheit der Zerlegung.
Wir führen noch eine kleine Variante des Zerlegungsbegriffs ein.
Definition 2.2 (Zerteilungen eines Intervalls und Riemansummen)
Seien a, b ∈ R mit a < b. Eine Zerteilung von [a, b] ist ein Paar ζ = (t0 , . . . , tn ; s1 , . . . , sn )
bestehend aus einer Zerlegung (t0 , . . . , tn ) von [a, b] und Punkten si ∈ [ti−1 , ti ] für
1 ≤ i ≤ n. Wir nennen α = (t0 , . . . , tn ) die zu ζ gehörende Zerlegung und δ(ζ) := δ(α)
die Feinheit der Zerteilung ζ. Ist schließlich f : [a, b] → R eine Funktion, so definieren
wir die zur Zerteilung ζ von [a, b] gehörende Riemansumme von f als
n
X
R(f ; ζ) :=
f (si ) · (ti − ti−1 ).
i=1
Oft werden wir äquidistante Zerlegungen verwenden, d.h. Zerlegungen bei denen alle
Teilintervalle dieselbe Länge haben. Ist n ≥ 1, so gibt es offenbar genau eine äquidistante Zerlegung von [a, b] in n Teilintervalle, nämlich α = (t0 , . . . , tn ) mit
b−a
b−a
tk = a + k ·
für 0 ≤ k ≤ n, also δ(α) =
.
n
n
2-8
Mathematik für Physiker II, SS 2015
Freitag 17.4
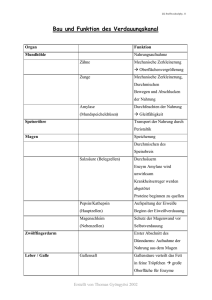
Es ist technisch hilfreich neben den Riemansummen noch einen mit diesen verwandten
Begriff einzuführen, die sogenannten Ober- und Untersummen einer Zerlegung.
Mi
mi
t i−1
Riemansumme R(f ; ζ)
ti
Zur Unter- und Obersumme
Definition 2.3 (Untersummen und Obersummen einer Zerlegung)
Seien a, b ∈ R mit a < b und f : [a, b] → R eine beschränkte Funktion. Sei α =
(t0 , . . . , tn ) eine Zerlegung von [a, b]. Für jedes 1 ≤ i ≤ n seien dann
mi := inf f ([ti−1 , ti ]),
Mi := sup f ([ti−1 , ti ]).
Die zur Zerlegung α gehörende Unter- beziehungsweise Obersumme von f sind dann
S(f ; α) :=
n
X
mi · (ti − ti−1 ) (Untersumme),
i=1
S(f ; α) :=
n
X
Mi · (ti − ti−1 ) (Obersumme).
i=1
Ist die Funktion f stetig, so sind Unter- und Obersummen nach I.§11.Satz 13 auch
Riemansummen bezüglich der Zerlegung α, für allgemeinere Funktionen muss dies nicht
unbedingt der Fall seien.
Untersumme
Obersumme
2-9
Mathematik für Physiker II, SS 2015
Freitag 17.4
Wir wollen drei kleine Beispiele durchgehen. Zunächst nehme an, dass f : [a, b] → R
eine konstante Funktion ist, etwa f (x) = c für alle x ∈ [a, b]. Für jede Zerlegung
α = (t0 , . . . , tn ) ist dann offenbar
S(α) = S(α) =
n
X
c(ti − ti−1 ) = c(b − a),
i=1
und auch jede Riemansumme dieser Funktion liefert denselben Wert. Als nächstes
betrachten wir die Funktion f : [a, b] → R; x 7→ x wobei a, b ∈ R mit a < b sind.
Sei α = (t0 , t1 , . . . , tn ) eine beliebige Zerlegung von [a, b]. Sei nun 1 ≤ i ≤ n, und wir
wollen die Zahlen mi und Mi berechnen. Dabei ist mi der kleinste Funktionswert von
f (x) = x für ti−1 ≤ x ≤ ti , und dies ist natürlich einfach der Wert an der linken Seite
des Intervalls, also mi = ti−1 . Ebenso ist der größte Funktionswert von f (x) = x in
diesem Intervall gleich dem Funktionswert an der rechten Seite, d.h. Mi = ti . Unterund Obersumme bezüglich dieser Zerlegung ergeben sich als
S(α) =
S(α) =
n
X
mi (ti − ti−1 ) =
n
X
i=1
i=1
n
X
n
X
Mi (ti − ti−1 ) =
i=1
ti−1 (ti − ti−1 ),
ti (ti − ti−1 ).
i=1
Es ist S(α) ≤ S(α) und wir wollen uns überlegen, wie weit sich diese beiden Zahlen
voneinander unterscheiden. Hierzu betrachten wir die Differenz von Ober- und Untersumme
n
X
(ti − ti−1 )2 .
S(α) − S(α) =
i=1
Wie groß kann dies maximal werden? Um dies zu sehen ziehen wir den größtmöglichen
Wert der Abstände ti − ti−1 aus der Summe heraus, also
S(α) − S(α) =
n
X
i=1
2
(ti − ti−1 ) ≤ max (ti − ti−1 ) ·
1≤i≤n
n
X
(ti − ti−1 ) = δ(α) · (b − a).
i=1
Wie schon bemerkt sind die Ober- und die Untersumme beides auch Riemansummen
bezüglich der gegebenen Zerlegung. Als eine weitere Riemansumme schauen wir uns
die Zerteilungspunkte si := (ti + ti−1 )/2 für 1 ≤ i ≤ n an. Ist dann ζ = (α; s1 , . . . , sn ),
so ergibt sich die Riemansumme
R(ζ) =
n
X
ti + ti−1
i=1
2
n
n
b2 − a2
1X
1X 2 2
(ti − ti−1 ) =
(ti + ti−1 )(ti − ti−1 ) =
(ti − ti−1 ) =
.
2 i=1
2 i=1
2
Ziehen wir die Summe gleich im ersten Schritt auseinander, so folgt das die Riemansumme auch
S(α) + S(α)
R(ζ) =
2
2-10
Mathematik für Physiker II, SS 2015
Freitag 17.4
das arithmetische Mittel von Unter- und Obersumme ist. Als unser letztes Beispiel
betrachten wir eine etwas merkwürdige Funktion, die sich aber schön einfach behandeln
läßt. Sei
(
1, x ∈ Q,
f : [0, 1] → R; x 7→
0, x ∈
/ Q,
die sogenannte Dirichlet Funktion. Sei α = (t0 , . . . , tn ) eine Zerlegung von [0, 1]. Sei
1 ≤ i ≤ n. Wir behaupten das dann mi = 0 und Mi = 1 sind. Hierzu müssen wir uns
nur klarmachen, dass es für alle a, b ∈ R mit a < b stets eine rationale Zahl ζ ∈ Q und
eine irrationale Zahl η ∈ R\Q mit ζ, η ∈ (a, b) gibt, und dies wollen wir als ein kleines
Lemma formulieren. Im Beweis des Lemmas werden wir wiederum benötigen das√es
überhaupt eine irrationale Zahl gibt, ganz konkret behaupten wir das die Wurzel 2
irrational ist. Dies ist
√ eines der klassischen Beispiele eines Beweises durch Widerspruch.
√
Nehme also an das 2 rational, also ein Bruch ganzer Zahlen,
ist.
Wegen
2 > 0 gibt
√
es dann natürliche Zahlen p, q ∈ N mit p, q ≥ 1 und 2 = p/q. Durch eventuelles
Auskürzen können wir dabei annehmen das p und q teilerfremd sind. Wegen
2=
√
2
2 =
p2
ist p2 = 2q 2 ,
q2
d.h. p2 ist gerade. Da das Quadrat ungerader Zahlen wieder ungerade ist, muss daher
auch p selbst gerade sein, d.h. es gibt eine weitere natürliche Zahl r ∈ N mit p = 2r,
also insbesondere r ≥ 1. Es folgt
2q 2 = p2 = (2r)2 = 4r2 , also q 2 = 2r2
und somit ist auch q 2 gerade. Genau wie bei p folgt das damit auch q gerade ist, d.h. p
und
√ q haben den gemeinsamen Teiler 2, ein Widerspruch. Dieser Widerspruch zeigt das
2∈
/ Q irrational sein muss. Damit können wir zum angekündigten Lemma kommen.
Lemma 2.1: Seien a, b ∈ R mit a < b.
(a) Es gibt eine rationale Zahl q ∈ (a, b) zwischen a und b.
(b) Es gibt eine irrationale Zahl ξ ∈ (a, b) zwischen a und b.
Beweis: (a) Aufgrund der archimedischen Eigenschaft der reellen Zahlen I.§1.Lemma
5 existiert ein n ∈ N mit n(b − a) > 1, also insbesondere n ≥ 1. Ebenfalls aufgrund der
archimedischen Eigenschaft gibt es ein p ∈ N ⊆ Z mit p > na und wir wählen p ∈ Z
minimal mit dieser Eigenschaft. Dann ist p − a ≤ na, also
p−1
p
≤a< .
n
n
Wir erhalten der rationale Zahl q := p/n ∈ Q mit q > a und
q=
p
p−1 1
1
=
+ ≤ a + < a + (b − a) = b.
n
n
n
n
2-11
Mathematik für Physiker II, SS 2015
Freitag 17.4
√
√
(b)√ Es gilt auch√a/ 2 < b/ 2 und nach (a) existiert eine rationale Zahl q 0 ∈ Q mit
0
a/ 2 <
√q < b/ 2.√Es gibt sogar 0eine von Null verschiedene0 rationale Zahl q ∈ Q\{0}
und ist q 0 =
mit a/ 2 < q < b/ 2, denn ist q 6= 0 so können wir q := q verwenden
√0,
√
0
so liefert eine weitere Anwendung von (a) ein q√∈ Q mit a/ 2 < q < q < b/ 2,
also
√ insbesondere q 6= 0. Damit ist auch ξ := q · 2 irrational, denn andernfalls wäre
2 = ξ/q rational, und es gilt a < ξ < b.
Teil (a) des Lemmas war auch Aufgabe (10.g) des vorigen Semesters. Kommen wir zum
Beispiel der Dirichlet Funktion und unserer Zerlegung α zurück, so zeigt das Lemma
tatsächlich mi = 0 und Mi =
P1 für alle 1 ≤ i ≤ n. Als Unter- und Obersummen ergeben
sich S(α) = 0 und S(α) = ni=1 (ti − ti−1 ) = 1.
2-12



![Hans Walser, [20120118] 135°-Dreieck 1 Flächensatz 2 Beweise](http://s1.studylibde.com/store/data/008864473_1-b466565bbf8b942a4e3325b10da928d2-300x300.png)


![Chr.Nelius: Algebra (SS 2006) 5 Beispiele: 6) Für g ∈ G ist [ g ] = { h](http://s1.studylibde.com/store/data/019445735_1-f86d87f063e96d5791ddd58831eb928a-300x300.png)