Vierpol-Theorie
Werbung

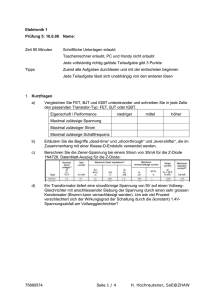
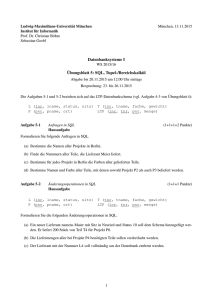
Vierpol-Theorie Vorbemerkung: Im folgenden wird keinesfalls eine vollständige Darstellung der VierpolTheorie gegeben, sondern nur jene Aspekte kurz besprochen, die die Vorteile der Beschreibung eines linearen Übertragungsgliedes mit Hilfe einer Matrix deutlich machen. Aus diesem Grund wird nur die Kettenmatrix (auch als „inverse Kettenmatrix“ bezeichnet) beschrieben. In der Literatur finden auch alternative Formulierungen, die zu der hier dargelegten vollkommen äquivalent sind – so wird zum Beispiel die Zählrichtung des Ausgangsstroms oft gerade umgekehrt angenommen. I1 Ein Vierpol ist eine beliebige elektrische / elektronische Schaltung mit je zwei elektrischen Anschlüssen am Eingang und am Ausgang. Zu beachten ist, dass der eingangsseitige U1 Strom I1 positiv gezählt wird, wenn er in das Element hinein fließt, und der Ausgangsseitige Strom I2 wird positiv gezählt, wenn er aus dem Element heraus fließt. Dies Wahl der Zählrichtung ermöglicht die Hintereinanderschaltung mehrerer Vierpole ohne Vorzeichenänderung der Ströme (siehe unten). I2 U2 Durch entsprechende äußere Beschaltung des Vierpols kann man genau zwei der vier Größen I1, I2, U1 und U2 vorgeben, die anderen beiden Größen stellen sich entsprechend der Innenschaltung des Vierpols ein. Gibt man zum Beispiel die beiden Spannungen vor, so sind die beiden Ströme eindeutig festgelegt. Umgekehrt bedeutet dies auch, dass durch den eingangsseitigen Strom I1 und die eingangsseitige Spannung U1 die beiden Ausgangsgrößen I2 und U2 eindeutig festgelegt sind. Wir betrachten nun den Fall, dass der Vierpol kein nichtlineares Verhalten (etwa durch Dioden etc.) aufweist1. Dann lassen sich die Ausgangsgrößen als lineare Funktionen der Eingangsgrößen darstellen. Mit einer 2-mal-2-Matrix (der sogenannten Kettenmatrix) K lässt sich damit schreiben: U 2 U K 1 I2 I1 Für den nebenstehenden einfachen Vierpol etwa, der nur aus einem Widerstand R besteht, gelten die Beziehungen I1 U2 = U1 - RI1 und I2 = I1 bzw. in Matrixschreibweise I2 R U1 U2 U 2 1 R U 1 I 2 0 1 I1 und damit ist die Matrix K zur Beschreibung diese Vierpols gegeben durch 1 R K 0 1 1 Falls der Vierpol nichtlineare Bauteile enthält, lässt sich die Vierpoltheorie dennoch anwenden, wenn nicht die absoluten Strom- und Spannungswerte, sondern nur die (kleinen) Strom- bzw. Spannungsänderungen in der Nähe des so genannten Arbeitspunktes betrachtet. Mit einer ähnlichen Überlegung erhält man zur Beschreibung des nebenstehenden Vierpols, der ebenfalls nur aus einem Widerstand R besteht, die Matrix I1 I2 R U1 0 1 K 1 R 1 U2 Bei der Hintereinanderschaltung mehrerer Vierpole erhält man die Kettenmatrix zur Beschreibung der Gesamtschaltung durch Multiplikation der Matrizen für jedes Einzelelement: U 3 U U K2 2 K2 K1 1 I2 I1 I3 I1 I2 K1 U1 also I3 K2 U2 Kgesamt = K2 K1 Zu beachten ist dabei, dass die Multiplikation der Einzelmatrizen „von hinten nach vorne“ erfolgt ! Beispiel: 10 k Gegeben ist folgende Schaltung: 20 k 5k 25 k a. Bestimme die Kettenmatrix dieser Schaltung. b. Bestimme Spannung und Strom am Ausgang, wenn Uein = 10 V und Iein = 3 mA. c. Bestimme Spannung und Strom am Eingang, wenn Uaus = 10 V und Iaus = 3 mA. 1 R Ks ( R) 0 1 1 0 Kp ( R) 1 1 R Kges Ks ( 5000 ) Kp ( 25000 ) Kp ( 20000 ) Ks ( 10000 ) Kges a. b. 4 1.45 1.95 10 9 10 5 1.9 10 44 Kges 0.003 4.8 10 3 1 Kges 10 77.5 3 0.003 5.25 10 Am Ausgang liegen also -44 V an und es fließen 4.8 mA Am Eingang liegen also 77 V an und es fließen 5.25 mA U3