Kap6_baseband_2008v1_4
Werbung

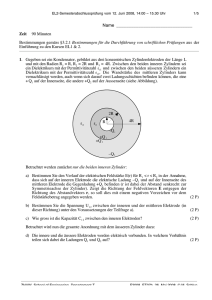
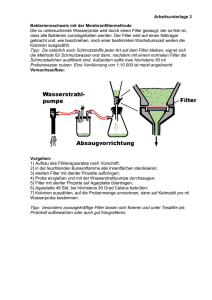
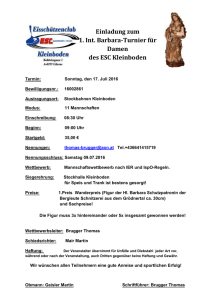
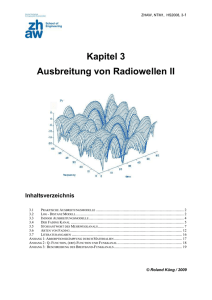
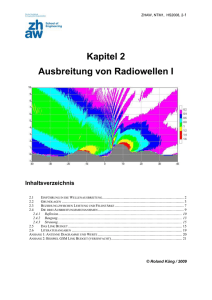
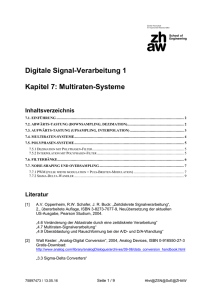
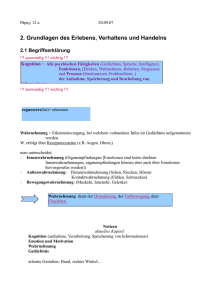
ZHAW, NTM1, HS2008, 6-1 Kapitel 6 Digitale Übertragung im Basisband Inhaltsverzeichnis 6.1 ÜBERBLICK ..................................................................................................................................... 2 6.2. LEITUNGSCODIERUNG ................................................................................................................. 6 6.2.1. 6.2.2. 6.2.3. 6.2.4. 6.2.5. 6.2.6. 6.2.7. 6.2.8. 6.2.9. Ziel der Leitungscodierung .............................................................................................. 6 Unipolarer Non-Return-to-Zero Code (NRZ) .................................................................. 6 Bipolarer NRZ Code ........................................................................................................ 7 NRZ Mark Code ............................................................................................................... 7 Return-to-Zero Code (RZ) .............................................................................................. 8 Bi-Phase oder Manchester Code .................................................................................... 8 Alternate Mark Inversion Code (AMI) .............................................................................. 9 Ternäre und Quaternäre Codes ...................................................................................... 9 Beispiel: Physical Layer von Fast Ethernet ................................................................... 11 6.3 IMPULSVERZERRUNGEN ............................................................................................................. 13 6.3.1. 6.3.2. 6.3.3. 6.3.4. Das Optimalfilterprinzip (Matched Filter) ....................................................................... 15 Intersymbolinterferenz ................................................................................................... 17 Nyquist-Filter .................................................................................................................. 19 Bitfehlerrate (BER)........................................................................................................ 22 6.4 LITERATURANGABEN .................................................................................................................. 28 ANHANG 1: PCM LINE CODES AND SPECTRAL DENSITIES ......................................................... 29 ANHANG 2: MATCHED FILTER AND CORRELATOR...................................................................... 30 ANHANG 3: Q-FUNKTION AND ERFC FUNCTION............................................................................ 31 © /Roland Küng / Marcel Rupf 2008 ZHAW, NTM1, HS2008, 6-2 6.1 Überblick Als Beispiel für eine digitale Übertragungseinrichtung nehmen wir ein System, das geeignet ist, Computerdaten über eine Zweidrahtleitung zwischen nur zwei Computern zu übertragen. An diesem Beispiel wollen wir die wichtigsten Funktionsblöcke, die prinzipiell in jeder digitalen Übertragungseinrichtung vorkommen, kennen lernen. In einem nächsten Schritt werden wir uns eingehender mit den einzelnen Funktionsblöcken befassen. Das Blockschema für die Übertragung unserer Computerdaten in nur einer Richtung zeigt Fig. 6.1. DEE DÜE Quelle DatenSender Leitung (Kanal) DÜE DEE DatenEmpfänger Senke RS-232C RS-422A Fig. 6.1: RS-232C RS-422A Prinzipschema einer Datenübertragungseinrichtung Bei der Übertragung von Daten zwischen zwei Computern unterscheidet man zwischen den Daten-Endeinrichtungen (DEE, englisch data terminating equipment oder DTE), also den Quellen und Senken und der Datenübertragungseinrichtung (DÜE, englisch data circuitterminating equipment oder DCE). Die Übertragung zwischen den beiden erfolgt nach verschiedenen Standards, zwei davon sind in der Zeichnung eingetragen. Diese Übertragungen sind dadurch gekennzeichnet, dass Daten und Takt, sowie zusätzliche Informationen wie Sendeanforderung usw. über getrennte Leitungen oder Drähte zwischen DEE und DÜE ausgetauscht werden. Man kann sich beim Blick auf dieses Schema natürlich sofort fragen, warum die Übertragung zwischen zwei Computern nicht grundsätzlich gemäss einer Norm wie RS-232C oder RS422A durchgeführt werden kann. Die Antwort ist einfach: Der Übertragungskanal dämpft das Signal und verzögert/filtert es, so dass auf der Empfangseite kein Digitalsignal mehr vorliegt, das eine Computerschnittstelle versteht (vgl. Titelbild). Man kann dies also nur machen, wenn die Distanzen nicht zu gross sind (einige Meter bis ca. 1km, je nach Norm und Datenrate). Über grössere Distanzen muss man Datensendern und -empfängern zwischen die Computer schalten, welche die Anpassung zwischen den Computerschnittstellen und dem Übertragungskanal herstellen. Mit einer geeigneten Umsetzung der Daten möchte man vermeiden, dass mehr als eine Leitung pro Übertragungsrichtung gebraucht werden. Dabei muss natürlich die Sicherheit der Datenübertragung möglichst gut gewährleistet sein. Wie vielfältig im Allgemeinen die Aufgaben der Datensender und -empfänger sind, zeigt das detaillierte Schema von Fig 6.2. Im Folgenden sollen die wichtigsten Funktionen anhand dieses Schemas im Überblick erklärt werden. Da der Datensender im weitesten Sinn eine Modulation, der Datenempfänger daher eine Demodulation ausführt, spricht man bei der Kombination von beiden zusammen auch häufig von einem Modulator-Demodulator oder kurz Modem. Bei der digitalen Übertragung unterscheidet man grundsätzlich zwischen synchroner und asynchroner Übertragung. synchron: Die Empfangsseite erwartet die Daten mit einem ganz bestimmten Takt asynchron: Ein Datenpaket kann jederzeit ankommen. Ab Start des Datenpakets rechnet der Empfänger mit einem definierten Zeitabstand von Bit zu Bit. Fig. 6.2: Blockschema eines digitalen Übertragungssystems [3] ZHAW, NTM1, HS2008, 6-3 ZHAW, NTM1, HS2008, 6-4 Im Fall von Fig. 6.2 handelt es sich um eine synchrone Übertragung. Die DÜE bestimmt den Takt der Übertragung. Deshalb ist auf der Sendeseite der Takt von der DÜE zur DEE eingezeichnet. Die Quelle (Computer) benötigt also einen Speicher für die zu übertragenden Daten, welche von der DÜE mit dem Takt abgerufen werden. Aus diesem Grund enthält die DÜE einen Taktgenerator. Unter Umständen ist die DÜE selber nicht frei in der Taktwahl, sondern erhält diesen von einer anderen Stelle, z.B. beim ISDN, wo der Takt von der Zentrale geliefert wird. Der Verstärker am Dateneingang der DÜE dient in erster Linie der Anpassung der Daten von der Übertragungsnorm zwischen DEE und DÜE an die interne Darstellung. So erfolgt z.B. die Übertragung bei RS-232C asymmetrisch mit bis zu ± 15 V, oder bei RS-422A symmetrisch auf Paardrähten mit ± 6 V (differentiell), was höhere Übertragungsraten und/oder grössere Distanzen erlaubt als bei RS-232C. Die interne Datendarstellung erfolgt gemäss den logischen Pegeln, welche zur verwendeten logischen Familie gehören. Ein bestimmtes Bit behält dabei seinen Wert während der ganzen Taktdauer. Praktisch immer ist es notwendig, die zu übertragenden Daten gegen Fehler zu schützen. In der Regel geschieht dies in der Quelle selber. Häufig wird im Datensender ein zusätzlicher Datenschutz hinzugefügt. Dieser erfordert zusätzliche Bits, sog. Sicherungsbits, welche in den Nutzdatenstrom eingefügt werden müssen. Dies hat zwei Folgen: • Der Datenstrom auf der Leitung ist höher als zwischen DÜE und DEE. Man benötigt deshalb auch einen erhöhten Takt für die Leitungsdaten. • Die zusätzlich eingefügten Bits müssen gekennzeichnet werden, damit sie empfangsseitig wieder entfernt werden können. Man macht dies normalerweise mit einem sog. Rahmen und einem Rahmenkennwort. Letzteres sind bekannte Bits, die in definiertem Abstand in den Datenstrom eingefügt werden. Eine Möglichkeit für einen Rahmenaufbau mit einem Rahmenkennwort zeigt Figur 6.3. Fig. 6.3: Beispiel eines Rahmenaufbaus mit Rahmensynchronwort Auf der Empfangsseite kann man das bekannte Rahmensynchronwort detektieren und von dort ausgehend jedes weitere Bit innerhalb des Rahmens durch Abzählen identifizieren. Auf der Leitung (Kanal) möchte man nur einen Datenstrom. Falls das Datensignal häufig wechselt (wir nehmen an, es sei rein binär) so erkennt man im Signal den Sendetakt, auch wenn er nicht speziell gesendet wird. Im Empfänger sollte es deshalb möglich sei, ein Duplikat des Sendetaktes wieder zu erzeugen. Bestehen die Daten jedoch während längerer Zeit aus lauter "0" oder "1", so versagt dieses Verfahren. Man muss deshalb die Daten in geeigneter Weise umformen, damit immer wieder in kurzen Abständen ein Bitwechsel im Sendesignal vorkommt. Man spricht hier von Leitungscodierung. Mit ihr verbindet man meist noch andere Aufgaben. So ist es oft erwünscht, dass das Sendesignal keinen Gleichspannungsanteil mehr enthält, damit es ohne Probleme über eine Übertragungseinrichtung, die nur für Wechselströme funktioniert, übertragen werden kann (z.B. eine Telefonleitung). ZHAW, NTM1, HS2008, 6-5 Nach der Leitungscodierung ist das Datensignal noch rein digital, es weist also harte Sprünge bei Datenwechseln auf. Damit verbunden ist ein breites Spektrum, das in manchen Fällen störend wirkt. Man muss also das Spektrum begrenzen, ohne dass die Nutzinformation unnötig beeinträchtigt wird. Diese Aufgabe übernimmt die Pulsformung. Der Verstärker und die Leitungsanpassung haben die Aufgabe, den notwendigen Sendepegel zu erzeugen und den Sender an die Leitung anzupassen. Bei einer symmetrischen Leitung bedeutet dies einen geeigneten symmetrischen Treiber, ev. eine Kopplung mit einem Transformator. Bei Telefonleitungen gehört auch noch ein Überspannungsschutz dazu. Bei faseroptischen Systemen erfolgt in diesem Teil die Umwandlung des elektrischen in ein optisches Signal. Auf der Leitung bzw. dem Kanal wird das Sendesignal abgeschwächt, linear verzerrt wegen der nicht idealen Übertragungseigenschaften der Leitung und es kommen noch Rauschen und andere Störsignale dazu. Die Aufgabe des Datenempfängers ist die möglichst fehlerfreie Rückgewinnung der ursprünglich gesendeten Daten. Seine Funktionsblöcke machen zum grössten Teil Funktionen auf der Sendeseite rückgängig, teilweise haben sie aber kein Gegenstück auf der Sendeseite. Als erstes muss das Empfangssignal verstärkt werden. Da der Empfangspegel je nach Leitungslänge variiert, enthält dieser Verstärker eine automatische Verstärkungsregelung. Anschliessend folgt ein Entzerrer, der die linearen Verzerrungen auf der Leitung kompensiert. Das Filter ist so dimensioniert, dass es das breitbandige Rauschen am Empfängereingang möglichst blockiert, gleichzeitig aber vom Nutzsignal einen zur Detektion der Daten optimalen Anteil passieren lässt. Ziel der Empfangseinrichtung ist schliesslich eine möglichst fehlerfreie Rückgewinnung der Daten. Diese Aufgabe ist ziemlich anspruchsvoll und erfordert spezielle Filter. Am Ausgang des Filters liegt noch ein analoges Signal vor, das in seinem gerundeten Verlauf die digitalen Daten und den Sendetakt bereits erkennen lässt (Fig. 6.4). Die Taktableitung hat, wie der Name verrät, die Aufgabe, aus diesem Signal einen stabilen Empfangstakt zu gewinnen. Mit diesem wird das gefilterte Empfangssignal im Entscheider im richtigen Zeitpunkt abgetastet und so der ursprünglich kodierte Datenstrom zurückgewonnen. Der Leitungsdecodierer kehrt die entsprechende Funktion im Sender um. Schliesslich müssen die Zusatzbits entfernt und die Fehlerkorrektur ausgewertet werden. In der Schnittstelle zur Datensenke erfolgt dann noch die Anpassung der Daten an die gewünschte Datenübertragung zur Senke. u t u gefiltertes Empfangss ignal zurückgewonnener Tak t t u t regeneriertes digitales Signal Fig. 6.4: Empfangssignal nach dem Filter, zurückgewonnener Takt und regeneriertes digitales Signal nach dem Entscheider ZHAW, NTM1, HS2008, 6-6 6.2. Leitungscodierung 6.2.1. Ziel der Leitungscodierung Die Leitungscodierung soll durch gezielte Verformung des Signalspektrums das zu übertragende digitale Datensignal an den Kanal anpassen. Enthält das Signal in Bereichen, in denen der Übertragungskanal nicht gut überträgt keine spektralen Komponenten, dann können auch keine Impulsverzerrungen auftreten. Folgende Gesichtspunkte sind bei der Formung des Signalspektrums relevant: 1. Gleichspannungsfreiheit: Häufig ist im Signalspektrum eine Nullstelle bei der Frequenz f = 0 erwünscht. Der lineare Mittelwert des Signals hat damit unabhängig vom Nachrichteninhalt den Wert Null. Dies erlaubt zum Beispiel wie in Figur 6.5 gezeigt, den Einsatz von Trenntrafos oder Koppelkondensatoren und damit eine DC-freie Übertragung: , ZW Figur 6.5: , ZW Der Einsatz von Trenntrafos und Koppelkondensatoren bedingt ein gleichspannungsfreies Signalspektrum. 2. Taktrückgewinnung: Unabhängig vom Verlauf des Datensignals (z.B. beim Auftreten von langen Null- oder Einsfolgen), sollten immer genügend Signalflanken vorhanden sein, damit am Empfangsort daraus der Takt zurück gewonnen werden kann. Nur mit einem synchronen Systemtakt kann das Empfangssignal im richtigen Zeitpunkt abgetastet und ausgewertet werden. 3. Kompaktes Spektrum: Das Signalspektrum sollte möglichst kompakt werden, um bei Frequenzmultiplexsystemen ein möglichst enges Kanalraster zu ermöglichen und damit eine gute Bandausnützung zu erreichen. Im Basisband wird das elektromagnetische Übersprechen auf Nachbarleitungen minimiert, wenn möglichst wenig hochfrequente Signalanteile auftreten. In den folgenden Abschnitten wird eine Reihe von Leitungscodes vorgestellt und unter den Gesichtspunkten 1-3 bewertet. Es gibt bessere und schlechtere Codes, aber es wird sich kein eindeutiger, unter allen Einsatzbedingungen optimaler Code herauskristallisieren. Zu vielfältig sind jeweils die Aspekte, die bei einer konkreten Anwendung berücksichtigt werden müssen. 6.2.2. Unipolarer Non-Return-to-Zero Code (NRZ) Häufig wird ein binäres Digitalsignal im unipolaren Non-Return-to-Zero Format dargestellt. Eine logische Eins (engl. mark) wird mit dem normierten Pegel 1 übertragen, während eine logische Null (engl. space) mit dem Pegel 0 dargestellt wird. Der Pegel bleibt jeweils über die ganze Bitdauer τ, d.h. während einer Taktperiode konstant. Folgen mehrere Bits mit dem Wert 1‘ hintereinander, so wird der Pegel 1 die ganze Zeit über gehalten. Deshalb wird dieser Code „Non-Return-to-Zero“, abgekürzt NRZ, genannt. ZHAW, NTM1, HS2008, 6-7 1 0 1 1 0 0 1 1 1 0 0 0 0 1 0 1 0 1 Datenfolge 0 1 Einsfolge t 0 1 Nullfolge 0 Fig. 6.6: Unipolarer Non-Return-to-Zero Code. Dieser Code hat den Nachteil, dass er erstens nicht mittelwertfrei ist und dass zweitens bei langen Eins-, respektive Nullfolgen keine Signalflanken auftreten, aus denen die Taktinformation und damit die Bitgrenzen extrahiert werden können. In Rechnerbussystemen muss deshalb der Takt als separates Signal geführt werden. Aus diesen Gründen eignet sich der NRZ-Code schlecht für die Übertragung über grössere Distanzen. 6.2.3. Bipolarer NRZ Code Hält sich die Abfolge von logisch 1 und logisch 0 Werten in etwa die Waage und können längere Null-, respektive Einsfolgen vermieden werden, erzielt ein bipolarer NRZ Code mit den Pegeln +1 für logisch Eins und -1 für logisch Null eine annähernde Gleichspannungsfreiheit. Die Definition von zwei zu Null symmetrischen Pegeln ist nicht auf den NRZ-Code beschränkt. Die meisten binären Leitungscodes existieren sowohl in einer unipolaren, wie auch in einer bipolaren Variante, so dass wir die beiden im Weiteren nicht separat aufführen wollen. 1 0 1 1 0 0 1 1 1 0 0 0 0 1 0 1 0 1 Datenfolge -1 1 Einsfolge t -1 1 Nullfolge -1 Fig. 6.7: Bipolarer NRZ Code. 6.2.4. NRZ Mark Code In gewissen Anwendungen kann am Empfangsort der absolute Pegel nicht mehr bestimmt werden, sondern es können nur Pegeländerungen detektiert werden. Sind zum Beispiel die beiden Adern einer symmetrischen Zweidrahtleitung nicht eindeutig angeschrieben, so können sie an einem Ende vertauscht angeschlossen werden. Dadurch wird die Polarität eines bipolaren Signals invertiert. Eine 0 wird zu einer 1 und umgekehrt. In solchen Fällen kann die zu übermittelnde Information differentiell codiert werden. Eine mögliche Realisierung bietet der NRZ Mark Code, der eine logische Eins (mark) durch einen Pegelwechsel von 0 auf 1 oder von 1 auf 0 codiert, während bei einer logischen Null keine Pegeländerung auftritt, sondern der Wert auf 0 oder 1 bleibt. ZHAW, NTM1, HS2008, 6-8 1 0 1 1 0 0 1 1 1 0 0 0 0 1 0 1 0 1 Datenfolge 0 1 Einsfolge t 0 1 Nullfolge 0 Fig. 6.8: NRZ Mark Code. 6.2.5. Return-to-Zero Code (RZ) Beim NRZ-Code entspricht die Dauer eines einzelnen Bits gerade dem Kehrwert der Taktfrequenz f0. Das Spektrum eines Rechteckpulses der Dauer hat ein sin(x)/x-förmiges Spektrum mit der ersten Nullstelle bei 1/ = f0 Ein bipolares NRZ-Signal, das sich aus einer Abfolge von solchen Rechteckpulsen mit zufälliger Polarität +1 oder -1 zusammensetzt, besitzt demnach keine Frequenzkomponente bei der Taktfrequenz f0. Konsequenz: Der Takt kann nicht durch eine einfache Filteroperation aus dem Datensignal gewonnen werden. Beim „Return-to-Zero“ Code kehrt der Pegel bei einer logischen Eins jeweils nach der halben Bitdauer /2 wieder auf Null zurück. Von daher der Name. Durch die Halbierung der Pulsdauer entsteht eine Linie bei der Taktfrequenz f0, die nun einfach zurückgewonnen werden kann. Der Preis dafür ist eine Vergrösserung der benötigten Signalbandbreite. 1 0 1 1 0 0 1 1 1 0 0 0 0 1 0 1 0 1 Datenfolge 0 1 Einsfolge t 0 1 Nullfolge 0 Fig. 6.9: Return-to-Zero Code. 6.2.6. Bi-Phase oder Manchester Code Treten im RZ-Code lange Nullfolgen auf, so fällt während dieser Zeit die Taktinformation aus. Für dieses Problem bietet der Bi-Phase Code Abhilfe, der auch Manchester Code genannt wird. Es gibt zwei gleichwertige Betrachtungsweisen bei der Definition dieses Codes. 1. Jeweils in der Mitte einer Bitdauer findet ein Pegelübergang statt. Dadurch ist die Taktrückgewinnung immer garantiert. Eine logische Eins wird als negative Flanke von 1 auf 0, eine logische Null als positive Flanke von 0 auf 1 codiert. 2. Die Bitdauer wird in zwei Hälften aufgeteilt. Zur Übertragung einer logischen Eins wird der Pegel 1 während der ersten Hälfte des Bits gesendet und der Pegel 0 während der zweiten Hälfte, bei einer logischen Null ist es gerade umgekehrt. Die bipolare Variante des Bi-Phase Codes mit den Pegeln +1 und -1 erzielt dabei gleichspannungsfreie Datenbits, da sich die beiden Bithälften mit entgegen gesetzter Polarität jeweils aufheben. Der Manchester Code wird bei Ethernet eingesetzt. Die grösste Schwierigkeit bei der Realisierung liegt in der Synchronisation, da Clock Jitter und NOise die Flanken verschmieren. ZHAW, NTM1, HS2008, 6-9 Damit die richtige Flanke ausgewertet wird, muss zuerst die Bitmitte bestimmt werden. Sonst werden „0“ und „1“ vertauscht. Beim physikalischen Ethernet-Protokoll wird deshalb vor jedem Paket eine Folge von abwechselnden Nullen und Einsen gesendet, deren steigende und fallende Flanken jeweils in die Bitmitte fallen und deshalb zur Synchronisation und Einmittelung des Empfangstaktes benutzt werden können. 1 0 1 1 0 0 1 1 1 0 0 0 0 1 0 1 0 1 Datenfolge 0 1 Einsfolge t 0 1 Nullfolge 0 Fig. 6.10: Bi-Phase oder Manchester Code. 6.2.7. Alternate Mark Inversion Code (AMI) Die AMI-Codierung ist ein ternärer Code. Das Leitungssignal kann die drei Werte -1, 0 und +1 annehmen. Für den logischen Wert 0 wird kein Puls gesendet, während für den Wert 1 abwechslungsweise positive und negative Pulse mit Pegel +1, respektive -1 gesendet werden. Durch diese Alternierung wird Gleichspannungsfreiheit erzielt. 1 0 1 1 0 0 1 1 1 0 0 0 0 1 0 1 0 1 Datenfolge 0 -1 1 Einsfolge 0 t -1 Nullfolge 1 0 -1 Fig. 6.11: Alternate Mark Inversion Code. 6.2.8. Ternäre und Quaternäre Codes Mit n nacheinander folgenden binären Symbolen können 2n mögliche Zustände codiert werden. Geht man bei der Übertragung zu ternären Symbolen mit drei Pegeln +, 0 und - über, wird mit m Symbolen eine Darstellung von 3m Zuständen möglich. Weil die zu übertragende Information meist in binärer Form vorliegt, muss eine Umkodierung in die ternäre Welt vorgenommen werden. Durch Bildung von Blöcken aus n nacheinander folgenden Bits ist eine Abbildung auf m nacheinander folgende ternäre Symbole möglich, falls gilt 3m 2 n oder logarithmisch m log( 2) n 0.631 n log( 3) Die Anzahl der benötigten Symbole reduziert sich also gut um einen Drittel beim Übergang von einer binären in eine ternäre Darstellung. In einem kontinuierlichen Datenstrom fallen in einer gewissen Zeiteinheit T eine Anzahl n binärer Bits an, die in derselben Zeitdauer T als m ternäre Symbole übertragen werden müssen, damit kein Pufferüberlauf oder Pufferunterlauf auftritt. Zwischen der Dauer 2 eines binären, respektive 3 eines ternären Symbols muss also die Beziehung ZHAW, NTM1, HS2008, 6-10 T n 2 m 3 gelten. Ein ternäres Symbol kann also bei gleichem Informationsdurchsatz ein Drittel länger dauern als ein binäres Symbol. Die benötigte Bandbreite als Kehrwert der Pulsdauer wird dadurch gut ein Drittel kleiner. Der verminderte Bandbreitenbedarf ist deshalb der Hauptgrund, dass mehrwertige Symbole bei der Übertragung eingesetzt werden. Wird andererseits bei gegebener Bandbreite durch den Einsatz höherwertiger Symbole der Datendurchsatz erhöht, so steigt bei gleich bleibender Signalleistung im allgemeinen die Empfindlichkeit gegenüber Störungen und Rauschen, da durch die zusätzlichen Amplitudenstufen der Abstand zwischen den einzelnen Pegeln geringer wird. Ternäre Codes, die aus binären Blöcken gebildet werden, besitzen die generelle Bezeichnung „nBmT“ Der einfachste Code in dieser Familie ist der 3B2T Code aus Figur 6.12. Acht mögliche Zustände, definiert durch einen Block von 3 Bits, werden auf 2 ternäre Symbole mit total 9 Zuständen abgebildet. Dies geschieht über eine eins-zu-eins Abbildung gemäss Tabelle 6.12, die auf die Verwendung des ternären Codeworts 00 verzichtet. 1 Datenfolge + 0 - Einsfolge t + 0 - Nullfolge + 0 - 0 1 1 0 0 1 1 1 0 0 0 0 1 0 1 0 1 Fig. 6.12: Ternärer 3B2T Code. Binär b1 0 0 0 0 1 1 1 1 n=3 b2 0 0 1 1 0 0 1 1 b3 0 1 0 1 0 1 0 1 Ternär t1 - 0 - - + + 0 + m=2 t2 - - 0 + - 0 + + Tabelle 6.12 Code-Tabelle für den ternären 3B2T Code. Wie der Figur 6.12 entnommen werden kann, garantiert der 3B2T Code weder die Gleichspannungsfreiheit, noch das ständige Vorhandensein von Taktinformation. Dies muss durch zusätzliche Massnahmen, wie zum Beispiel durch Scrambling der Nutzdaten bewerkstelligt werden. In der Schweiz wird für ISDN der quaternäre Code 2B1Q eingesetzt, der zwei Bits in einer eins-zu-eins Abbildung auf ein vierwertiges Symbol abbildet, wie Figur 6.13 zeigt. Der Hauptvorteil liegt beim halbierten Bandbreitebedarf. Ansonsten ist ohne Zusatzmassnahmen weder die Gleichspannungsfreiheit, noch die Taktrückgewinnung gewährleistet. Eine Möglichkeit lange Null- und Einsfolgen zu vermeiden, sowie ein annähernd gleiches Verhältnis von logischen Nullen und Einsen zu erzielen, ist das Scrambling (Verwürfeln) der Nutzdatensequenz vor der Abbildung auf einen Leitungscode. Dies kann mittels eines rückgekoppelten Schieberegisters geschehen, das eine pseudozufällige Sequenz mit einer maximal-langen Periodendauer erzeugt. ZHAW, NTM1, HS2008, 6-11 1 0 1 1 0 0 1 1 1 0 0 0 0 1 0 1 0 1 3 Datenfolge 1 -1 -3 3 Einsfolge 1 -1 t -3 Nullfolge 3 1 -1 -3 Figur 6.13: Quaternärer 2B1Q Code. 6.2.9. Beispiel: Physical Layer von Fast Ethernet Die Informationen zu diesem Kapitel stammen aus [2] Im Jahre 1995 erweiterte die IEEE-802.3u-Gruppe den Ethernet Standard für Datenraten von 100 Mb/s (Fast Ethernet). Die Erweiterungen des Standards beziehen sich auf den Physical Layer (PHY). 25 MNibbles/s 4B/5B-Encoding 4B/5B-Decoding NRZ-to-NRZI NRZI-to-NRZ NRZI-to-NRZ NRZ-to-NRZI 125 Mb/s Scrambling Descrambling MLT3-Encoding MLT3-Decoding B < 31.25 MHz pseudoternär Treiber Empfänger typ. -1V, 0V, 1V Fig. 6.14: Physical Layer von 100Base-TX Fast Ethernet. Die bekannteste Fast-Ethernet-Variante 100Base-TX basiert auf einem Twisted-Pair (TP) Kabel der Kategorie 5 mit 100Ω-Impedanz. Um die Datenrate von 10 Mb/s auf 100 Mb/s zu erhöhen, musste ein anderes Kodierungsverfahren als bei 10Base-T verwendet werden. Hätte man die Manchester-Kodierung von 10Base-T beibehalten, müssten Frequenzkomponenten bis 100 MHz und Oberwellen bis 300 MHz übertragen werden, was zu massiven Übertragungsproblemen auf den Kategorie 5 TP-Kabeln geführt hätte. In Fig. 6.14 ist der Physical Layer von 100Base-TX Fast Ethernet dargestellt. ZHAW, NTM1, HS2008, 6-12 Fast Ethernet setzt wie FDDI eine NRZI-ähnliche Kodierung (non return to zero invert on ones) ein. Sie wird MLT3-Kodierung genannt (multi level transmit - 3 levels). NRZI stellt eine logische Eins durch einen Pegelwechsel innerhalb der Bitperiode dar. Eine logische Null ist durch einen fehlenden Wechsel gekennzeichnet, siehe Abbildung 6.15. Bei der MLT3-Kodierung werden 3 verschiedene Signalpegel -1, 0 und +1 verwendet. Eine Null führt zu keiner Änderung des Signalpegels. Jede neue Eins führt zu einer Änderung des Signalpegels 0, +1, 0 -1, 0, +1, ... Es sind keine Wechsel direkt von +1 nach -1 oder umgekehrt erlaubt. 1 1 0 1 1 0 1 0 0 0 1 1 1 1 1 1 0 1 NRZI 0 1 MLT3 t 0 -1 Fig. 6.15: NRZI- und MLT3-Leitungskodierung. Da bei einer MLT3-Kodierung nicht in jeder Bitperiode automatisch ein Pegelwechsel stattfindet, reduziert sich die Übertragungsfrequenz deutlich. Die Reduzierung der Pegelwechsel ist bei der Übertragung einer Nullfolge aber problematisch. Auf Grund der fehlenden Pegelwechsel wären keine ausreichenden Taktinformationen im Datenstrom enthalten und der Gleichstromanteil zu gross. Deshalb verwendet man bei Fast Ethernet zusätzlich eine 4B/5BCodierung. Die 4B/5B-Kodierung wandelt 4 Datenbits (Nibbles) in 5-Bit-Symbole um, so dass die Länge einer Nullsequenz limitiert wird. Dadurch wird sichergestellt, dass ausreichend Taktinformation im Datenstrom enthalten ist. Ausserdem wird eine gewisse DC-Freiheit erzwungen. Zusätzlich können die 16 nicht benutzten 5-Bit-Symbole zur Signalisierung, als idle- Symbole und zur Fehlererkennung eingesetzt werden. Vor der MLT3-Kodierung wird noch ein Scrambling durchgeführt, um das Spektrum „flach“ zu machen, was sich positiv auf die elektromagnetische Abstrahlung auswirkt. Fig. 6.16: Scrambling bei Fast Ethernet (100Base-TX). Für das Scrambling wird ein 11 Bit langes, lineares, rückgekoppeltes Schieberegister verwendet (engl. Linear Feedback Shift Register LFSR), siehe Fig. 6.16. Das LFSR generiert eine 2047 Bit lange PN-Sequenz gemäss folgender Rekursion X[n] = (X[n-9] + X[n-11]) modulo 2, die zu den Daten addiert wird (modulo 2 bzw. XOR). ZHAW, NTM1, HS2008, 6-13 Die gleiche PN-Sequenz wird im Empfänger bzw. im Descrambler wieder von den verwürfelten Daten subtrahiert (modulo 2 Addition und Subtraktion sind identisch). Dazu müssen die beiden LFSR im Scrambler und Descrambler synchronisiert werden, d.h. in beiden LFSR müssen zur selben Zeit die gleichen Startwerte (engl. seed) verwendet werden. Die Synchronisation kann im Descrambler aus dem Datenstrom heraus mit Hilfe der idle-Symbole gemacht werden. Bei Fast Ethernet 100Base-TX wird durch die 4B/5B-Codierung die Datenrate von 100 Mb/s auf 125 Mb/s erhöht, siehe Abbildung 6.14. Bei der MLT3-Codierung wird die grösste Grundfrequenz generiert, wenn viele Einer aufeinander folgen. Man kann zeigen, dass die kürzeste Periode T0 = 4∙Tb = 32 ns, beträgt, wobei Tb = 1/125 MHz. Damit erhält man bei der Fast Ethernet 100Base-TX Datenübertragung eine maximale Grundfrequenz von f0 = 125/4 MHz = 31.25 MHz die keine Probleme bei der Übertragung über Twisted Pair Kabel der Kategorie 5 bis zu 100m bereitet. Im Treiber in Fig. 6-14 findet eine Pulsformung und eine Pegelanpassung statt. Für die Pulsformung schreibt der Standard min. und max. Anstiegszeiten bzw. Abfallzeiten vor. 6.3 Impulsverzerrungen Die Leitungscodierung allein genügt dann nicht mehr, wenn die Senderendstufe oder der Kanal eine wesentliche Filterwirkung auf das Signal ausüben. Zusätzlich bei langen Übertragungsleitungen mit entsprechend grosser Signaldämpfung bedroht Rauschen die Entscheidung zu verfälschen. Dies ist im Basisband zum Beispiel bei der Steigerung zu Gigabit Ethernet auf Twisted Pair der Fall und in praktisch allen Funkübertragungen. Die Filterung bewirkt ein zeitliches Verschmieren der Pulse, so dass im Empfänger für die Rückgewinnung der Pulssequenz nicht mehr optimale Verhältnisse geschaffen sind. Für den Systemdesigner treten dabei 2 Fragen auf: 1. Wie filtere ich im Empfänger so, dass das S/N für den gegebenen Sendeimpuls maximal wird. 2. Wie forme ich die Impulse aus der Leitungscodierung so, dass beim Abtasten im Empfänger keine Verschmierung auftritt Kümmern wir uns zuerst um die Frage 1. In Figur 6.17 ist das allgemeine Blockschaltbild eines digitalen Übertragungssystems aufgezeichnet, mit dem wir eine binäre Informationssequenz d[n] mit der Rate fc = 1/T übertragen wollen. Sender Empfänger d[n] 1 1 0 1 0 0 1 ... Datenquelle, Takt fc = 1/T s(t) C(f) ~ Modulator Pulsformung se(t) ne(t) Übertragungskanal H(f) ~ ~ Empfangsfilter d‘[n] p(t) ... 1 1 0 1 0 0 1 n(t) Datensenke Abtastung Takt fs = 1/T Detektion Fig. 6.17: Allgemeines Blockschaltbild eines digitalen Übertragungssystems. ZHAW, NTM1, HS2008, 6-14 Der Einfachheit halber nehmen wir ein unipolares Sendesignal an. Soll eine 1 übertragen werden, so wird ein Puls s(t) gesendet, bei einer 0 wird kein Puls ausgesendet. Das Sendesignal u(t) setzt sich also aus der zeitlichen Überlagerung aller Pulse s(t+nT) zusammen, die eine 1 darstellen: u( t ) d [n]s(t nT ) n Im allgemeinen Fall wird für eine 1 die Pulsform s1(t) gesendet und für eine 0 eine zweite Pulsform s0(t). Meist wird die bipolare Form s0(t) = -s1(t) gewählt, es könnten aber auch zwei völlig verschiedene Wellenformen sein. Allgemein setzt sich das Sendesignal also aus der Überlagerung von zwei Pulsformen zusammen: u( t ) d[n]s (t nT ) d[n]s (t nT ) . 1 0 n Wir nehmen eine Übertragung im Basisband an, bei der das Sendesignal s(t) mittels eines Leitungscodes und einem Sendefilter erzeugt und direkt auf den Kanal gegeben wird. Damit haben alle Übertragungsfunktionen und Filter im Übertragungspfad Tiefpasscharakter. Der Kanal, der von jedem Einzelpuls s(t) durchlaufen wird, besitzt die lineare Übertragungsfunktion C(f), dessen Amplituden- und Phasengang das Signalspektrum S(f) des Pulses beeinflussen. Damit hat das Pulsspektrum Se am Eingang des Empfängers die modifizierte Form: Se ( f ) C ( f ) S ( f ) Im Zeitbereich ergibt sich daraus die Faltung von s(t) mit der Kanalimpulsantwort c(t): se (t ) c(t ) s(t ) . Das Gesamtsignal am Empfänger setzt sich aus der Überlagerung aller empfangenen Einzelpulse se(t+nT) zusammen, die zusätzlich mit einem additiven Rausch- und Störsignal ne(t) versetzt sind. ue (t ) c(t ) u(t ) ne (t ) d [n]s (t nT ) n (t ) e e n Fig. 6.18: Basisband-Übertragung und Modell mit Kanal und Empfangsfilter Das Empfangsfilter H(f) hat die Aufgabe, erstens die Rauschbandbreite zu beschränken und zweitens den Empfangspuls so zu formen, dass er optimal abgetastet werden kann. ZHAW, NTM1, HS2008, 6-15 Kümmern wir uns wieder um die erste Aufgabe. Das Signalspektrum bekommt die Form: P ( f ) H ( f ) Se ( f ) H ( f ) C ( f ) S ( f ) . Im Zeitbereich folgt daraus die Faltung p(t ) h(t ) se (t ) h(t ) c(t ) s(t ) Für das Gesamtsignal kurz vor der Abtastung können wir damit schreiben ua (t ) h(t ) ue (t ) ne (t ) t ) n (t ) d[n] p(t nT ) h( e n n( t ) Unter der Voraussetzung eines linearen Systems können wir uns also das Signal ua(t) als Überlagerung von Einzelpulsen p(t+nT) vorstellen, deren Abfolge durch die zu übertragende Informationssequenz d[n] bestimmt wird, wie das nochmals Fig. 6.18 zusammenfasst. Die Frage stellt sich, wie ein Einzelpuls p(t) idealerweise aussehen soll, damit er optimal abgetastet und detektiert werden kann. 6.3.1. Das Optimalfilterprinzip (Matched Filter) Als erste Eigenschaft sollte die Pulsamplitude p(T) im Abtastzeitpunkt t = T, im Verhältnis zum Effektivwert des bandbegrenzten Rauschsignals n(t) möglichst gross werden. Dadurch wird der Signal-zu-Rauschabstand S/N maximiert, also: 2 p (T ) S 2 N n (t ) N stellt dabei die aus n(t) = h(t)ne(t) bestimmte mittlere Rauschleistung nach dem Empfangsfilter dar (Fig. 6.18). Mit p(t) = h(t)se(t) hängt auch das Pulsmaximum p(T) vom Empfangsfilter h(t) ab. Handelt es sich bei ne(t) um additives, weisses und normalverteiltes Rauschen, so kann man zeigen, dass das S/N im Abtastzeitpunkt durch die Wahl eines Empfangsfilters der Form H (f ) Se (f )e j 2 Tf S(f ) C(f ) e j 2 Tf maximiert wird, wobei die Multiplikation mit e-j2Tf für die entsprechenden linearen Phase sorgt, so dass H(f) eine positive Gruppenlaufzeit mit dem Wert T annehmen kann und damit das Filter realisierbar wird. Bei der Erfüllung obiger Gleichung spricht man von einem Optimalfilter (englisch: Matched Filter), dessen Übertragungsfunktion H(f) idealerweise dem konjugiert-komplexen Verlauf des Spektrums Se(f) des empfangenen Einzelpulses entsprechen sollte. Dadurch werden erstens alle Laufzeit- und Phasenverzerrungen durch den Phasengang kompensiert und zweitens bekommen die Amplitudengänge denselben Betrag, so dass insbesondere die Bandbreiten von Signalspektrum und Empfangsfilter damit gleich gross werden. Das Resultat ist auch einleuchtend, denn es besagt: Man soll die Signalanteile von s(t) im Spektrum dort am stärksten gewichten, wo auch maximale Pegel auftreten. Auf den Beweis der Beziehung wollen wir an dieser Stelle verzichten [8]. Wir merken uns aber, dass die Maximierung des S/N im Abtastzeitpunkt des Empfängers nicht von der Pulsform p(t) selber abhängt, wenn man ein Optimalfilter einsetzt, .sondern nur von dessen Leistung. Die meisten modernen Übertragungssysteme versuchen, eine möglichst gute Annäherung an das Optimalfilterprinzip zu erzielen. Dies ist nicht immer einfach möglich, da neben dem bekannten Sendesignalspektrum S(f), zusätzlich der oft zeitlich-veränderliche Übertragungskanal C(f) geschätzt werden muss. ZHAW, NTM1, HS2008, 6-16 Die Forderung nach konjugiert komplexem Verlauf bedeutet im Zeitbereich ein Filter mit der Stossantwort: s (T t ), 0 t T h(t) e 0, sonst Da die Kanalübertragungsfunktion C(f) im Voraus meist nicht genau bekannt ist und sich bei Funkanwendungen sogar über die Zeit ändert, wird häufig C(f) = 1 gesetzt und die folgende vereinfachte Beziehung genutzt: H( f ) S( f ) e j2Tf bzw. H(f ) S(f ) also im Zeitbereich h( t ) s(T t ) Damit wird die Stossantwort des optimalen Empfangsfilters zum Spiegelbild der Sendeimpulsform s(t) (vgl. Fig. 6.19a). Fig. 6.19a: Matched Filter Stossantwort für C(f) = 1 Das Optimalfilter bestimmt zur Zeit T somit nichts anderes als die Signalenergie von s(t), was auch der Fläche unter dem Spektrum P(f) =S(f)2 entspricht. Das Matched Filter behält nicht die Wellenform des Eingangssignals bei, weshalb der optimale Wert nur zum Zeitpunkt T abgetastet werden kann! Das MF gewichtet im Frequenzgang genau jene spektralen Anteile, die vom Sendepuls belegt sind und zwar proportional der Belegungsstärke. Es reduziert damit das Rauschen optimal. Für additives, weisses und normalverteiltes Rauschen ne(t) mit der einseitig spektralen Dichte N0 kann man zeigen [8], dass das S/N im Abtastzeitpunkt T bei Verwendung eines Optimalfilters den folgenden Wert annimmt: S(f ) 2 S df N0 N out N 0 / 2 2 s 2 ( t ) dt 2E s N0 Es ist die Energie des Sendepulses s(t) und N0 die Rauschleistungsdichte (spektral einseitig betrachtet). Das S/N ist unabhängig von der Pulsform! Eine Erhöhung ist nur durch Erhöhung der Symbolenergie möglich, also durch mehr mittlere Signalleistung oder längere Symboldauer. Da auch gilt: Es S N out N 0 BT ist beim Optimalfilter offenbar immer B 1 2T Es ist also die minimale Bandbreite nach dem Abtasttheorem massgebend. In der Praxis ergeben sich aber meist doch einige technische Randbedingungen. Die Pulsform im Zeitbereich sollte ihre meiste Energie innerhalb des Abtastintervalls T besitzen und die Bandbreite sollte endlich begrenzt sein. Das Rechteckfilter der Bandbreite B ist hierfür sicher nicht das beste Beispiel, da die Impulsantwort extrem lange ist und damit aufwändig in der Realisation. Der Rechteckimpuls der Dauer T ist von der Bandbreite ZHAW, NTM1, HS2008, 6-17 gesehen nicht ideal, da diese in Sender und Empfänger technisch begrenzt werden muss. Wird er jedoch nicht zu eng gefiltert, so ist der Verlust gering. Würden man nicht optimal filtern, sondern einfach die für s(t) nötige Bandbreite ungewichtet durchlassen, so würde das S/N am Ausgang schlechter ausfallen. Es würde einfach nur die verrauschte Amplitude des Empfangsignals zur Zeit T (im Pulsmaximum) abgetastet. Fig. 19b: Korrelator als Alternative zum Optimalfilter Es gibt noch eine zweite Art das gute S/N des Matched Filters zu erreichen: Mit einem Korrelator. Aus der Ähnlichkeit von Korrelation und Faltung ergibt sich für das Matched Filter zum Abtastzeitpunkt T dasselbe Resultat wenn man den Empfangsimpuls mit dem Sendeimpuls korreliert. Dazu benötigt der Empfänger (weiterhin Annahme C(f) = 1) eine Kopie vom benutzten Sendesignal s(t) und verarbeitet das Empfangsignal wie in Fig. 6.19b unten dargestellt. Man beachte, dass Optimalfilter und Korrelator nur zum Zeitpunkt T dasselbe Resultat liefern. Fig. 6.19b zeigt dazu ein Beispiel für einen Cosinus-Impuls. Ein wichtiges Beispiel der Optimalfilterung erhält man für rechteckförmige Sendepulse s(t). Die Stossantwort des Matched Filters ist in diesem Fall ebenfalls ein Rechteckimpuls der Dauer T. Eine solche Stossantwort liefert der klassische Integrator, der nach der Zeit T rückgesetzt wird (englisch: Integrate and Dump). Matched Filter und Korrelatorlösung sind in diesem Fall identisch. Nicht optimal am Rechteckpuls ist aber seine grosse Bandbreite und damit die Verzerrungen bei der technischen Filterung in Sender, Kanal und Empfänger, welche zu einer Verschmierung der einzelnen Pulspakete führt. Wenden wir uns nun der zweiten Fragestellung zu: wie die Verschmierung vermieden werden kann bzw. wie die Pulse am besten ausgeformt sein sollen. 6.3.2. Intersymbolinterferenz Gemäss den obigen Betrachtungen verursachen die Kanalantwort c(t), sowie die Impulsantwort h(t) des Empfangsfilters eine mehr oder weniger starke Verzerrung des Sendepulses s(t), die sich häufig als vorlaufende und nachlaufende Schwingungen bemerkbar macht. Dies führt dazu, dass die zeitliche Dauer von p(t) wesentlich über die nominelle Symboldauer T eines Informationsbits hinausgeht. Nacheinanderfolgende Symbole überlappen sich gegenseitig - es kommt zu einer Beeinflussung der Nachbarzeichen, die auch Intersymbol-Interferenz (ISI) genannt wird. Damit in den Abtastzeitpunkten nT, mit n = ... ,-2,-1,0,1,2, .... keine gegenseitige Beeinflussung der gesendeten Symbole auftritt, hat Nyquist folgendes Kriterium für den zeitlichen Verlauf von p(t) aufgestellt: ZHAW, NTM1, HS2008, 6-18 1 n 0 p(nT ) 0 n 0 Erstes Nyquist-Kriterium: Für geeignete Beispielfunktionen müssen wir nicht weit suchen. p( t ) Die bekannte Funktion sin( t /T ) t /T in Figur 6.20 erfüllt klar das Kriterium, dass der auszuwertende Puls im Abtastzeitpunkt nT sein Maximum p(nT) = 1 erreicht, während alle Nachpaarpulse an diesem Ort einen Nulldurchgang durchlaufen. 1 0.5 t 0 -2T -3T/2 -T -T/2 0 T/2 T 3T/2 2T Fig. 6.20 Einzelpulse p(t+nT) mit einer sin(t/T)/(t/T) Charakteristik. Eine spezielle Eigenschaft des Pulses p(t) = sin(t/T)/(t/T) besteht darin, dass sein in Figur 6.21 gezeigtes Spektrum P(f) einen exakt rechteckförmigen Verlauf mit einem minimalen Bandbreitebedarf B = 1/(2T) besitzt, d.h. B ≥ R/2. 1 0.5 f 0 -1.5/T -1/T -0.5/T 0 0.5/T 1/T 1.5/T Fig. 6.21: Spektrum P(f) eines sin(t/T)/(t/T)-förmigen Pulses. Um das Ausmass der Intersymbolinterferenz mit einem Blick abschätzen zu können, wird häufig das Augendiagramm in Figur 6.22 als praktisches Hilfsmittel eingesetzt. Es wird durch ein zeitliches Übereinanderlegen sämtlicher Verläufe des Gesamtsignals ua (t ) d [n] p(t nT ) n(t ) n konstruiert, wobei der Einfluss des Rauschsignals n(t) vorerst weglassen wird. Es müssen also alle möglichen Bitkombinationen 0 0 0 0 0 , 0 0 0 0 1 , 0 0 0 1 0 , 0 0 0 1 1 , 0 0 1 0 0 , 0 0 1 0 1 , 0 0 1 1 0 , 0 0 1 1 1 , 0 1 0 0 0 , 0 1 0 0 1 , 0 1 0 1 0 , 0 1 0 1 1 , 0 1 1 0 0 , 0 1 1 0 1 , 0 1 1 1 0 , 0 1 1 1 1 , der Informationssequenz d[n] durchgespielt werden. ZHAW, NTM1, HS2008, 6-19 Die Grösse der „Augenöffnung“ ist ein Mass für die Qualität des abzutastenden Signals. Im Beispiel aus Figur 5.36 nehmen sämtliche Signalverläufe in den Abtastzeitpunkten entweder den Wert 1 oder 0 an, es tritt also keine Nachbarzeichenbeeinflussung auf und die vertikale Öffnung des Auges im Abtastzeitpunkt wird maximal. 1.5 1 0.5 t 0 -0.5 -2T -3T/2 -T -T/2 0 T/2 T 3T/2 2T Fig. 6.22: Augendiagramm für einen sin(t/T)/(t/T)-förmigen Einzelpuls. Es ist nicht immer möglich, exakt in der Pulsmitte abzutasten. Abhängig von der Güte der Taktrückgewinnung und der Synchronisation kann der genaue Abtastzeitpunkt schwanken. Man spricht von einem mehr oder weniger grossen „Jitter“. Die Entscheidungsschwelle, ob eine 1 oder eine 0 gesendet wurde, liegt beim unipolaren Beispiel bei p(t) = 0.5. Die horizontale Augenöffnung bei diesem Wert gibt den zulässigen Jitter an, der noch nicht zu einer Fehlentscheidung mit resultierendem Bitfehler führt. 6.3.3. Nyquist-Filter In Hinsicht auf eine maximale horizontale Augenöffnung ist der Puls p(t) = sin(t/T)/(t/T) aus Figur 6.20 nicht optimal. Das Optimum wird durch die Einhaltung des zweiten NyquistKriteriums erreicht, das folgende Zusatzbedingung postuliert: n0 1 p(nT / 2) 0.5 n 1 0 n 2, ... Zweites Nyquist-Kriterium: Der Puls p(t) sollte also bei der halben Symboldauer auf die Hälfte des Maximalpegels abgesunken sein und bei den weiteren Vielfachen der halben Symboldauer jeweils einen Nulldurchgang besitzen. Eine Funktion, welche das zweite Nyquist-Kriterium erfüllt, ist in Figur 6.23 aufgetragen und intuitiv einleuchtend. Sie wird durch die Formel beschrieben: p( t ) sin( t /T ) cos( t /T ) t /T 1 4(t /T ) 2 1 0.5 t 0 -2T -3T/2 -T -T/2 0 T/2 Fig. 6.23: Einzelpulse p(t+nT) für Roll-Off Faktor = 1. T 3T/2 2T ZHAW, NTM1, HS2008, 6-20 Der Cosinus-Term sorgt für die zusätzlichen Nulldurchgänge zwischen den Symbolen. Das zugehörige Spektrum P(f) ist in Figur 6.24 aufgetragen. 1 0.5 f 0 -1.5/T -1/T -0.5/T 0 0.5/T 1/T 1.5/T Figur 6.24: Pulsspektrum P(f) für Roll-Off Faktor = 1. Das Spektrum wird durch die Beziehung 1 cos(Tf ) P (f ) 0 f 1/T f 1/T beschrieben und heisst wegen seiner Form Raised Cosine Puls. Im Vergleich zum rechteckförmigen Spektrum aus Figur 6.21 benötigt es die doppelte Bandbreite B = 1/T. Das resultierende Augendiagramm ist in Figur 6.25 gezeigt. Es besitzt klar die gewünschte Eigenschaft einer möglichst grossen Augenöffnung in der Horizontalen und ist damit weitgehend unempfindlich gegenüber Schwankungen des Abtastzeitpunkts. 1.5 1 0.5 t 0 -0.5 -2T -3T/2 -T -T/2 0 T/2 T 3T/2 2T Fig. 6.25: Augendiagramm für Roll-Off Faktor = 1. Die Pulsformen in Figur 6.20 und Figur 6.23 mit ihren zugehörigen Spektren in Figur 6.21, respektive Figur 6.24, stellen die beiden Extreme einer ganzen Familie von Pulsen dar, welche das erste Nyquist-Kriterium erfüllen. Die Eigenschaften der einzelnen Familienmitglieder werden über einen Parameter gesteuert, der „Roll-Off“ Faktor genannt wird und der den Wertebereich 0 1 besitzt. Die Bedeutung von wird aus der Definition des Spektrums ersichtlich: 1 T 1 P(f ) 1 cos f 2T 0 1 2T 1 1 f 2T 2T 1 f 2T 0 f ZHAW, NTM1, HS2008, 6-21 1 0.5 f 0 -1.5/T -1/T -0.5/T 0 0.5/T 1/T 1.5/T Fig.; 6.26 Pulsspektrum P(f) für Roll-Off Faktor = 0.5. Der Roll-Off Faktor gibt an, wie schnell das Spektrum mittels einer Cosinus-Flanke auf Null sinkt. Für = 0 resultiert mit der Rechteckfunktion der minimale Bandbreitenbedarf von B = 1/2T. Am anderen Ende ergibt sich mit = 1 der maximale Bandbreitenbedarf von B = 1/T. Dazwischen lässt sich der Bandbreitenbedarf mit der Formel B(β) = (1+β)/2T beschreiben. Der Roll-Off Faktor ist also ein Mass für die benötigte Zusatzbandbreite /2T, wie das Spektrum für = 0.5 in Figur 6.26 zeigt. Die Zeitfunktion p(t) schreibt sich in Abhängigkeit des Parameters als . p( t ) sin( t / T) cos( t / T ) t/T 1 4(t / T) 2 1 0.5 t 0 -2T -3T/2 -T -T/2 0 T/2 T 3T/2 2T Fig. 6.27: Einzelpulse p(t+nT) für Roll-Off Faktor = 0.5. 1.5 1 0.5 t 0 -0.5 . -2T -3T/2 -T -T/2 0 T/2 Fig. 6.28: Augendiagramm für Roll-Off Faktor = 0.5. T 3T/2 2T ZHAW, NTM1, HS2008, 6-22 Für = 0.5 ergibt sich die Pulsform in Figur 6.27 und damit resultiert das Augendiagramm in Figur 6.28. Als Kompromiss zwischen erhöhtem Bandbreitenbedarf und grosser Augenöffnung in horizontaler Richtung, wird in der Praxis meist ein Roll-Off Faktor im Bereich 0.4 0.6 gewählt. Mit der Bedingung der optimalen Abtastung nach dem Durchlaufen des Kanals gilt die Beziehung P(f ) H(f ) C(f ) S(f ) Soll p(t) das erste Nyquist-Kriterium erfüllen, muss das Empfangsfilter H(f) so entworfen werden, dass P(f) von der Form der Familie mit einem wählbaren Roll-Off Faktor wird. Das resultierende Filter H(f) wird deshalb Nyquist-Filter genannt. Da die Kanalübertragungsfunktion C(f) im Voraus meist nicht genau bekannt ist und sich bei Funkanwendungen sogar über die Zeit ändert, wird häufig C(f) = 1 gesetzt und beim Design die vereinfachte Beziehung verwendet: P(f ) H(f ) S(f ) Falls die Sendepulsform s(t) frei wählbar ist, ist es aus Sicht des Optimalfilterprinzips von Vorteil die Gewichtung von P(f) etwa zu gleichen Teilen auf das Signalspektrum S(f) und das Empfangsfilter (Matched Filter) H(f) zu verteilen, so dass gilt: H(f ) S(f ) P(f ) Im Fall des Raised Cosine Filters ergeben sich die bekannten Root Raised Cosine Filter. Man beachte: das „Root“ bezieht sich auf das Wurzelziehen im Spektrum und ist nicht identisch mit der Wurzelfunktion der Pulsform. Zum Schluss sei noch angemerkt, dass der Dreieckpuls der Dauer 2T die Nyquist Bedingungen beide auch erfüllt. Sein Spektrum hat (sinx/x)2 Verlauf. Bei auf Sender und Empfänger verteilten Filtern ergibt sich je der Rechteckpuls der Dauer T. Dies ist in der Implementation die einfachste Lösung sowohl im Sender (Digitalpuls) wie Empfänger (Integrator). Sie braucht aber viel Bandbreite und läuft so Gefahr durch die technischen Filter oder den Kanal verzerrt zu werden und so trotzdem ISI zu erzeugen. Auch die weiter oben betrachtete sinx/x Funktion erfüllt die zweite Nyquist Bedingung nicht mal so schlecht und würde das ideale Rechteckfilter Spektrum aufweisen. Der Signalpuls hat aber eine sehr lange An- und Abklingdauer im Zeitbereich und ist daher aufwändig in der Erzeugung. So bildet die hier betrachtete Raised Cosine Familie, bzw. deren Implementation als Root Raised Cosine der beste Kompromiss. 6.3.4. Bitfehlerrate, Bit Error Rate (BER) Bislang haben wir die abzutastenden Signale als rauschfrei angenommen. Berücksichtigen wir das additive Rauschsignal n(t), erhalten wir verrauschte Augendiagramme. Für die Darstellung in Figur 6.29 wurde ein Nyquistpuls p(t) mit einem Roll-Off Faktor = 1 bei einem Signal-zu-Rauschverhältnis von S/N = 20 dB gewählt. ZHAW, NTM1, HS2008, 6-23 1.5 1 0.5 t 0 -0.5 -2T Fig. 6.29; -3T/2 -T -T/2 0 T/2 T 3T/2 2T Augendiagramm für einen Nyquistpuls mit Roll-Off Faktor = 1 bei einem Signal-zu-Rauschverhältnis von S/N = 20 dB. Additives Rauschen verkleinert die Augenöffnung und verursacht beim Überschreiten der Entscheidungsschwelle Bitfehler. Dies führt uns zum Thema dieses Abschnitts, nämlich den Zusammenhang zwischen dem Signal-zu-Rauschabstand S/N im Zeitpunkt der Abtastung und der damit resultierenden Bitfehlerwahrscheinlichkeit oder Bitfehlerrate (englisch Bit Error Rate, BER) herzuleiten. Bei den nun folgenden Formeln geht es darum diese einmal gesehen zu haben und dann das Resultat benutzen zu können. Die mittlere Leistung N des Rauschsignals n(t) kann experimentell durch eine genügend lange Mittelung der quadrierten Rauschspannung n2(t) über die Zeit t bestimmt werden. T/2 N lim T 1 n 2 ( t ) dt T T/ 2 Dabei wurde der Bezugswiderstand R = 1 angenommen, an dem sowohl die Rauschleistung N, wie auch die Signalleistung S berechnet wird. Ist das Rauschen thermischen Ursprungs, so kann n(t) als normalverteilte Zufallsvariable mit der Amplitudenverteilung pr ( x ) 1 x2 / 2 e 2 mit x n N angenommen werden. Die Varianz der Normalverteilung entspricht gerade der Rauschleistung N, während die Standardabweichung als Quadratwurzel der Varianz gleich dem Effektivwert der Rauschspannung n(t) ist. Die Rauschleistungsdichte im Spektrum ist weiss und beträgt einseitig gemessen N0. Tasten wir nun das mit Rauschen behaftete Signal nach dem Empfangsfilter H(f) im Zeitraster tm = mT periodisch ab, so erhalten wir abhängig vom gesendeten Datenbit d[m], und mit p(mT) = p(0) die Spannungswerte p(0) n (mT ) d(m) 1 u (mT ) n (mT ) d(m) 0 Dabei ist der Rauschanteil n(mT) als abgetastete Version von n(t) ebenfalls eine normalverteilte Zufallsvariable mit Varianz N. Die Amplitudenverteilung von u(mT) entspricht damit für d[m] = 0 direkt der Normalverteilung) des Rauschens: ZHAW, NTM1, HS2008, 6-24 pr ( x ) 1 x 2 / 2 e 2 x mit u (mT ) N und für d[m] = 1 der um das Pulsmaximum s(0) verschobenen Verteilung: pr ( x ' ) 1 x2 / 2 e 2 x' mit u (mT ) p(0) N Die Wahrscheinlichkeitsverteilung pr(u(mT) = ux) für d[m] = 0 und d[m] = 1 sind in Figur 6.30 aufgetragen. Figur 6.30 Amplitudenverteilung des abgetasteten, mit normalverteiltem Rauschen versetzten, unipolaren Binärsignals u(mT). Die Entscheidungsschwelle, ob eine 1 oder eine 0 gesendet wurde, liegt in der Mitte zwischen den zwei nominellen Zuständen s(0) und 0, d.h. bei us = p(0)/2. Für eine normierte Pulsamplitude p (mT) = p(0) = 1 ergibt sich damit eine Schwelle bei 0.5. Die Detektionsschaltung liefert damit folgendes digitale Datensignal 1 u (mT ) p(0) / 2 d ^ [ m] 0 u (mT ) p(0) / 2 Wie man Figur 6.30 entnehmen kann, existiert eine gewisse Wahrscheinlichkeit P(1|0), dass eine 1 detektiert wird, obwohl eine 0 gesendet wurde, nämlich immer dann, wenn die Amplitude im Abtastzeitpunkt bedingt durch das normal- bzw. Gaussverteilte Rauschen grösser als die Schwelle p(0)/2 wird. Diese Wahrscheinlichkeit kann durch Integration der Wahrscheinlichkeitsdichtefunktion berechnet werden: P(10) pr( x )dx xs xs 2 1 e x / 2 dx Q( x s ) 2 mit xs p(0) 2 N wobei Q(xs) die so genannte Q-Funktion beschreibt, für die es Tabellen (Anhang 3) und z.B. in MATLAB als qfunc(x) Funktionen gibt. Mit der Definition des Signal-zu-Rausch Abstands (englisch: Signal to Noise Ratio, SNR) im Empfänger und p(mT) = p(0) zu: ZHAW, NTM1, HS2008, 6-25 S p(0) N N 2 erhalten wir für die bedingte Fehlerwahrscheinlichkeit: 1 P (1 0) Q 2 S N Weil die Entscheidungsschwelle in der Mitte liegt, folgt aus Symmetriegründen für die bedingte Wahrscheinlichkeit, dass eine 0 detektiert wird, obwohl eine 1 gesendet wurde: P(0 |1) P(1| 0) . Der binäre Übertragungskanal kann nun mit den Übergangswahrscheinlichkeiten gemäss Figur 6.31 modelliert werden. P(1|1) P(d‘[m]=1) P(d[m]=1) P(1|0) P(0|1) P(d‘[m]=0) P(d[m]=0) P(0|0) Fig. 6.31: Übergangswahrscheinlichkeiten für den binären Übertragungskanal. Die totale Wahrscheinlichkeit, dass ein Bitfehler auftritt, berechnet sich nach Figur 6.31 mit P(d [m] d [m]) P(1| 0) P(d [m] 0) P(0 |1) P(d [m] 1) . Mit der Beziehung P(d[m]=0) + P(d[m]=1) = 1 folgt für die mittlere Bitfehlerrate eines unipolaren Binärsignals 1 BER P(d '[m] d [m]) Q 2 S N Es Q 2N 0 Eb Q N 0 Mit den S/N Beziehung für das Optimalfilter kann S/N wieder durch die Sendepulsenergie Es und die Rauschleistungsdichte N0 am Empfängereingang ausgedrückt werden: S 2Es N N0 Da im unipolaren Fall nur bei der „1“ ein Impuls gesendet wird ist es fair den Mittelwert Es/2 für die Bit-Energie zu nehmen und die BER in Funktion der Bitenergie Eb auszudrücken. Die wichtige Figur 6.32 liefert zu den BER Werten das dazu notwendige Eb/N0. Eb die Energie pro Bit die im Sender aufgewendet wird und die Rauschleistungsdichte N0 am Empfängereingang bestimmt durch die Rauschzahl, sind wichtige Dimensionierungsgrössen für ein Übertragungssystem. ZHAW, NTM1, HS2008, 6-26 Es wird ein relativ grosses Eb/N0 von 9.8 dB benötigt, um eine Bitfehlerrate von 10-3 zu erzielen. Für eine BER von 10-6 sind dann nur noch 3.8 dB zusätzlich nötig und mit weiteren 2 Dezibel sind schon 10-9 möglich. Weil die Kurve für kleine Bitfehlerwahrscheinlichkeiten sehr steil verläuft, sollte beim Entwurf eines Systems eine genügende SNR-Sicherheitsmarge eingeplant werden, damit die geforderte BER im Betrieb garantiert erreicht wird. Bei gleichbleibendem SNR kann eine wesentlich verbesserte Detektion erzielt werden, wenn anstatt einem unipolaren Binärsignal ein bipolares Binärsignal verwendet wird. Mit den beiden Pegeln +p(0) und -p(0) für die Zustände 1, respektive 0, verdoppelt sich der Abstand zur Entscheidungsschwelle, die nun neu bei us = 0 zu liegen kommt. Wie Figur 6.32 zeigt, überlappen sich bei gleich bleibendem SNR die Gaussverteilungen der beiden logischen Zustände wesentlich weniger. Durch den doppelten Abstand berechnet sich die Bitfehlerwahrscheinlichkeit für ein bipolares Binärsignal mit der Formel 2 Eb S Q BER P(d '[m] d [m]) Q N 0 N Im direkten Vergleich mit der Formel für das unipolare Signal sieht man, dass für das Erreichen der gleichen BER beim bipolaren Signal nur ein Viertel des S/N benötigt wird. Vergessen wir aber nicht, dass wir für bipolar die doppelte Energie pro Bit aufzuwenden haben. Es ist deshalb wiederum fair und üblich einen Vergleich auf Ebene Bitenergie zu tun. In der Endabrechnung für Eb/N0 kann daher nur 3 dB Gewinn erzielt werden. Fig. 6.33: Amplitudenverteilung des abgetasteten, mit normalverteiltem Rauschen versetzten, bipolaren Binärsignals u(mT) ZHAW, NTM1, HS2008, 6-27 Fig. 6.32: Bitfehlerwahrscheinlichkeit BER als Funktion des Signal-zu-Rauschabstand SNR in Dezibel für unipolare und bipolare Binärsignale. Allgemein kann ein Korrelator Empfänger mit Entscheider nach Fig. 6.34 implementiert werden mit den Signalimpulsen s1(t) und s2(t) für „0“ und „1“ . Die Schwelle des Entscheiders liegt beim arithmetischen Mittel der Signalenergien von s1 und s2. Fig. 6.34: Blockbild Korrelations-Empfänger für allgemeines Sendesignal Für die Berechnung der BER ist es aber einfacher mathematisch ein äquivalentes allg. gültiges Modell zu benutzen, bei dem auf die Signaldifferenz korreliert wird. Man sucht dabei im Wesentlichen das Maximale S/N für den Abstand der beiden Signale im Signalraum. ZHAW, NTM1, HS2008, 6-28 Es gilt dann einfach für die Energie des Differenzsignals Ed : T Ed s1 (t ) s 2 (t ) dt 2 0 Die Fehlerrate bestimmt sich dann entsprechend mit Hilfe der Formel: Ed BER P (d '[m] d [m]) Q 2N 0 Die Differenzenergie Ed lässt sich fallweise durch Eb ausdrücken und man gelangt so zu sinnvoll vergleichbaren BER Kurven. Zusammenfassung Kap. 6.3: 1. Ein Optimalfilter (Matched Filter) ist eine Art Mittelungsfilter 2. Es maximiert das Signal zu Geräuschverhältnis des Empfangsignals 3. Das Matched Filter minimiert die BER des Empfangsignals. Die BER Gleichungen gehen immer von der Annahme aus, dass ein Matched Filter verwendet wurde 4. Seine Stossantwort ist die zeitlich gespiegelte Form des gesendeten Signals. Ist die Stossantwort symmetrisch, so kann dasselbe Filter für Empfänger und Sender benutzt werden 5. Root raised cosine Filter ist ein solches Matched Filter, welches auch noch die Intersymbol Interferenz reduziert 6. Integrate & Dump Filter sind nur für Rechtecksignale ein Matched Filter 7. Weitere systembedingte Filter (Kanal) machen das Optimalfilter nicht ideal aber sind meist immer noch der beste Praxis Ansatz 6.4 Literaturangaben [1] J.G. Proakis, M. Salehi, “Grundlagen der Kommunikationstechnik”, Pearson, 2004. [2] J. Rech, „Ethernet“, Verlag Heinz Heise, 2002, ISBN 3-88229-186-9. [3] Prof. Dr. M. Rupf „ Nachrichtentechnik & Modulation, NTM“, ZHAW-Skript, 2005 [5] M. Meyer, „Kommunikationstechnik“, ISBN-978-3-8348-0564-5,Vieweg+Teubner 2008. [7] M. Hufschmid, „Information und Kommunikation“, Teubner, 2006. [8] Digital and Analog Communication Systems, Leon Couch, ISBN-10: 0-13-142492-0, Prentice Hall 2007 Matched Filter: http://rfdesign.com/images/archive/0901Litwin32.pdf Ähnlicher Stoff: www.ant.uni-bremen.de/sixcms/media.php/102/5225/GNT_kapIV.ppt ZHAW, NTM1, HS2008, 6-29 Anhang 1: PCM Line Codes and Spectral Densities ZHAW, NTM1, HS2008, 6-30 Anhang 2: Matched Filter and Correlator Bei den Überlegungen an am Filter und Korrelator treten infolge der Schreibweise von rechts nach links und des Zeitverlaufs von Signalen immer wieder Fehlüberlegungen auf. Eine Modellbetrachtung wie unten dargestellt verhindert solche Fehler. Lassen sie die Signale in Gedanken mit der Zeit so wie sie gezeichnet sind in die Verarbeitungsblöcke fliessen. Das Matched Filter besteht aus vielen Fingern definierter Länge, welche die an ihnen liegenden Signalwerte gewichten und in der Sammelleitung summieren (vgl. FIR Filter, SAW Filter) ZHAW, NTM1, HS2008, 6-31 Anhang 3: Q-Funktion and erfc Function