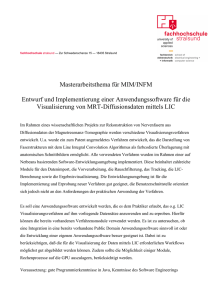
XC hange E O W U B ac .c tr k e r- s o ft w a Kapitel 4 Potentialtheorie 4.1 Einführung Die Potentialtheorie ist die Theorie der Strömungen, deren Geschwindigkeitsfeld ein Potential bestizt. Dies ist für eine Strömung gegeben, wenn diese rotationsfrei (oder auch vortizitätsfrei) ist. Die Potentialtheorie ist in viskosen Grenzschichten sowie in Strömungen mit hohen Reibungskräften nicht gültig, da diese Strömungen nicht rotationsfrei sind. Achtung, dies ist einzig durch unsere Beobachtungen motivierbar. In der Tat ist die Eigenschaft viskos/nicht viskos eine Materialeigenschaft und bestimmt nicht über die Rotationsfreiheit der Strömung an sich. Es können also rotationsfreie 反正 Strömungen mit viskosen Fluiden existieren (wobei alle Fluide ohnehin viskos sind, manche mehr und manche weniger, ein nicht viskoses Fluid ist eigentlich unphysikalisch). Abbildung 4.1 verdeutlicht den Sinn dieser beiden Betrachtungsweisen an einem aussagekräftigen Beispiel (Flugzeugflügel). Es ist klar, dass in der Umgebung des Flügels ganz unterschiedliche Bedingungen herrschen als unmittelbar an der Flügeloberfläche, und diese müssen physikalisch unterschiedlich modelliert werden. Um die Gültigkeit der Potentialtheorie zu verstehen, ist es sinnvoll sich zuvor Gedanken über den Begriff der Rotation zu machen. Im ersten Beispiel wurde erwähnt, dass die Strömung an der Oberfläche rotationsbehaftet ist. Es ist leicht vorstellbar wie das Fluid an der Wand geschert wird, da es an der Oberfläche haftet. Wichtig dabei ist die Überlegung, dass eine solche Scherung immer als Überlagerung einer Dehnung und einer Drehung dargestellt werden kann, wie in Kapitel 1 bereits gesehen. Eine Scherung eines Fluidelements besteht also immer aus einer Drehung, also einer Rotation des Elements ! Dies ist die anschauliche Erklärung dafür, dass Grenzschichten rotationsbehaftet sind (siehe Abbildung 4.2). Im ersten Schritt wird mithilfe der Definition der Wirbelstärke die Erhaltung der Wirbelstärke hergeleitet und deren Bedeutung im zweidimensionalen Fall diskutiert. 4.2 Erhaltung der Wirbelstärke in 2D Die Wirbelstärke wird als Vektorprodukt des Divergenzoperators mit der Geschwindigkeit definiert. � � � i � � � ω � = � × �u = �� ∂ � ∂x1 � � � u1 j ∂ ∂x2 u2 � � k �� � � ∂ �= � ∂x3 � � � u3 � 35 ∂u3 ∂u2 − ∂x2 ∂x3 ∂u1 ∂u3 − ∂x3 ∂x1 ∂u2 ∂u1 − ∂x1 ∂x2 om to k lic C .c om k lic C t Y N Y U B to re . . k e r- s o ft w a w w ac ww ww tr di ! F- or O W t N di PD hange E ! XC or PD F- re XC hange E O W t U B Abbildung 4.1: Anwendungsmöglichkeit der Potentialtheorie an einem Flugzeugflügel Abbildung 4.2: Scherung eines Elements an der Wand ac .c tr om to k lic KAPITEL 4. POTENTIALTHEORIE . . re C .c om Y N Y U B to k lic C 36 k e r- s o ft w a w w ac ww ww tr di ! F- or O W t N di PD hange E ! XC or PD F- k e r- s o ft w a re F- hange E O W N ac k e r- s o ft w a ∂ui =0 ∂x3 ∂u3 =0 ∂xi Somit vereinfacht sich die Wirbelstärke in 2D auf die letzte Komponente: ∂u2 ∂u1 − ∂x1 ∂x2 Mit ω wird ab hier im 2D-Fall die z-Komponente der Wirbelstärke bezeichnet. Die Navier-Stokes Gleichungen einer inkompressiblen Strömung ohne Volumenkräfte sollen in Erinnerung gerufen werden, um anschließend die Erhaltungsgleichung der Wirbelstärke herzuleiten. ∂u1 ∂u1 ∂u1 1 ∂p ∂ 2 u1 ∂ 2 u1 + u1 + u2 =− +ν 2 +ν 2 ∂t ∂x1 ∂x2 p ∂x1 ∂x1 ∂x2 2 ∂u2 ∂u2 ∂u2 1 ∂p ∂ u2 ∂ 2 u2 + u1 + u2 =− +ν 2 +ν 2 ∂t ∂x1 ∂x2 p ∂x2 ∂x1 ∂x2 (4.1) (4.2) Ableitung der Gleichung (4.1) nach x2 und der Gleichung (4.2) nach x1 und vereinfachen mit der Kontinuitätsgleichung ergibt: � � � � � � ∂ ∂u1 ∂u1 ∂u1 ∂ ∂ + u1 + u2 ∂t ∂x2 ∂x2 ∂x1 ∂x2 ∂x2 2 2 2 ∂ ∂u1 ∂ ∂u1 1 ∂ p +ν 2 +ν 2 (4.3) =− � ∂x1 ∂x2 ∂x1 ∂x2 ∂x2 ∂x2 � � � � � � ∂ ∂ ∂ ∂u2 ∂u2 ∂u2 + u1 + u2 ∂t ∂x1 ∂x1 ∂x1 ∂x1 ∂x2 2 2 2 ∂ ∂u2 ∂ ∂u2 1 ∂ p +ν 2 +ν 2 (4.4) =− � ∂x1 ∂x2 ∂x1 ∂x1 ∂x2 ∂x1 ∂ ∂t ∂ ∂t � � ∂u1 ∂x2 ∂u2 ∂x1 � � + u1 + u1 ✚ ✚ ✚ ✚ ∂ 2 u1 ∂u1 ∂u ∂ 2 u1 ∂u1 ∂u 1 2 + ✚✚ + u2 2 + ✚✚ ∂x1 ∂x2 ✚ ∂x1 ∂x2 ∂x2 ✚ ∂x2 ∂x2 1 ∂ 2p ∂ 2 ∂u1 ∂ 2 ∂u1 =− +ν 2 +ν 2 � ∂x1 ∂x2 ∂x1 ∂x2 ∂x2 ∂x2 ✚ ✚ ✚ ✚ ∂ 2 u2 ∂u1 ∂u ∂ 2 u2 ∂u2 ∂u ✚ 2 + u2 ✚ 2 + + ∂x21 ✚ ∂x✚1 ∂x1 ∂x1 ∂x2 ✚ ∂x✚1 ∂x2 2 2 1 ∂ p ∂ ∂u2 ∂ 2 ∂u2 =− +ν 2 +ν 2 � ∂x1 ∂x2 ∂x1 ∂x1 ∂x2 ∂x1 U (4.5) (4.6) Wird nun die Differenz der Gleichung (4.6) und der Gleichung (4.5) gebildet, erkennt man, dass die Druckterme verschwinden. � � � � � � ∂ ∂u2 ∂u1 ∂ ∂ ∂u2 ∂u1 ∂u2 ∂u1 − +u1 − +u2 − ∂t ∂x1 ∂x2 ∂x1 ∂x1 ∂x2 ∂x2 ∂x1 ∂x2 � � � �� � �� � �� � ω ω ω � � � � ∂ 2 ∂u2 ∂u1 ∂ 2 ∂u2 ∂u1 +ν 2 (4.7) =ν 2 − − ∂x1 ∂x1 ∂x2 ∂x2 ∂x1 ∂x2 om k tr In 2D können folgende Vereinfachungen gemacht werden: ωz = B to 37 lic 4.2. ERHALTUNG DER WIRBELSTÄRKE IN 2D C .c om k lic C t Y N Y U B to re . . k e r- s o ft w a w w ac ww ww tr di ! XC or O W t .c di PD hange E ! XC or PD F- re XC hange E O W t B . . Wird die Definition der Wirbelstärke eingesetzt, erhält man die Erhaltungsgleichung der Wirbelstärke: � � 2 ∂ω ∂ω ∂ ω ∂ 2ω ∂ω + u1 + u2 =ν + 2 (4.8) ∂t ∂x1 ∂x2 ∂x21 ∂x2 Die Gleichung kann in dimensionslose Form gebracht werden, unter Verwendung der materiellen zeitlichen Ableitung: � � Dω 1 ∂ 2ω ∂ 2ω = + 2 (4.9) Dt Re ∂x21 ∂x2 • es ist zu bemerken, dass wenn Re → ∞ Dω = 0 −→ dies bedeutet, das wirbelfreie Strömungen unter diesen Verhältnissen wirbelfrei Dt bleiben. • in 2D exisitert kein „Stretching/Tilting“ der Wirbel (Ausdehnung/Verkippung). Dieser Effekt tritt in 3D in einem zusätzlichen Term auf, welcher in 2D aufgrund der Orthogonalität der Wirbelstärke und des Geschwindigkeitsfelds verschwindet. Die Erhaltungsgleichung lautet in 3D: ρ(ui ∂wk ∂uk ∂ 2 wk ) = wi +µ ∂xi ∂xi ∂xi ∂xi ∂uk existiert in 2D nur für i = 3, die Ableitung der Geschwindigkeiten nach der ∂xi z-Richtung (i = 3) verschwindet aber im ebenen Fall. Der Term wi 4.3 Was bedeutet Rotationsfreiheit? In der Einführung wurde auf die Rotation bei Scherung aufmerksam gemacht, um für den Begriff der Rotation ein Gefühl zu entwickeln. Hier soll das Verständnis erweitert werden, indem gezeigt wird, dass eine Drehung im System nicht unbedingt Rotation bedeutet. Dazu werden ein Starrkörperwirbel (Fluidelemente verhalten sich wie ein drehender Festkörper) und ein Potentialwirbel betrachtet. Starrkörperwirbel Potentialwirbel Uϕ (r) = Ωr Uϕ (r) = 1 ∂ (rΩr) = 2Ω ω= r ∂r K r � � 1 ∂ K ω= r =0 r ∂r ✁ r✁ � �� � =0 ac .c tr om to k lic C .c om KAPITEL 4. POTENTIALTHEORIE re U Y N Y U B to k lic C 38 k e r- s o ft w a w w ac ww ww tr di ! F- or O W t N di PD hange E ! XC or PD F- k e r- s o ft w a re F- hange E O W N U ac k e r- s o ft w a Die Wirbelstärke ist mit der „lokaler Drehgeschwindigkeit“ der Fluidpartikel verbunden, und hat mit der makroskopischen Form der Stromlinien nichts zu tun. Bei dem Starrkörperwirbel „rotiert“ ein Fluidelement, und das Problem ist nicht rotationsfrei. Beim Potentialwirbel dagegen rotiert ein solches Fluidelement nicht, das Problem ist rotationsfrei. Ein Beispiel für einen Starrkörperwirbel ist ein Karusell, wo jeder Fahrgast sich mitdreht, ein Beispiel für einen Potentialwirbel ist ein Riesenrad, wo die Gondeln immer die gleiche Orientierung haben. Inkompressible rotationsfreie Strömung Inkompressible rotationsfreie Strömungen in 2D müssen die Kontinuitätsgleichung und die Wirbelfreiheit erfüllen. Solche Strömungen sind näherungsweise in der Technik zu finden, insofern die Betrachtung nicht in Nähe von Elementen geschieht, welche eine Grenzschicht ausbilden können. Weiterhin muss die Rotationsfreiheit zum Beispiel durch eine rotationsfreie Anströmung gegeben om k tr Abbildung 4.3: schematische Darstellung von Starrkörperwirbel und Potentialwirbel : ein Linienelement rotiert beim Potentialwirbel nicht auf seiner Kreisbahn, im Gegenteil zum Starrkörperwirbel 4.4 B to 39 lic 4.4. INKOMPRESSIBLE ROTATIONSFREIE STRÖMUNG C .c om k lic C t Y N Y U B to re . . k e r- s o ft w a w w ac ww ww tr di ! XC or O W t .c di PD hange E ! XC or PD F- re XC hange E O W t B . . sein. ∂u1 ∂u2 + =0 ∂x1 ∂x2 ∂u2 ∂u1 ω3 = − =0 ∂x1 ∂x2 Kontinuitäts-Gleichung Rotationsfreiheit 4.4.1 (4.10) (4.11) Zwei Lösungsansätze: Potential- und Stromfunktion Um dieses Problem zu lösen sind zwei Lösungen denkbar, welche Potentialfunktion und Stromfunktion genannt werden. 1. Wir erfüllen Gleichung (4.11) mit einer Potentialfunktion Φ mit Eigenschaft ∂Φ u1 ∂x 1 = �u = �Φ = �u = ∂Φ u2 ∂x2 Diese Funktion erfüllt die Rotationsfreiheit, da ∂u2 ∂u1 ∂Φ ∂Φ ω3 = − = − =0 ∂x1 ∂x2 ∂x1 ∂x2 ∂x2 ∂x1 Einsetzen der Potentialfunktion in die Kontinuitäts-Gleichung ergibt die Laplace-Gleichung für die Potentialfunktion: ∂ 2Φ ∂ 2Φ + =0 ∂x21 ∂x22 (4.12) � mit Eigenschaft 2. Wir erfüllen Gleichung (4.10) mit einer Stromfunktion Ψ u1 ∂Ψ ∂x2 �u = �Φ = �u = = u2 − ∂Ψ ∂x1 Diese Funktion erfüllt die Kontinuitätsgleichung, da ∂u1 ∂u2 ∂ 2Ψ ∂ 2Ψ + = − =0 ∂x1 ∂x2 ∂x1 ∂x2 ∂x1 ∂x2 Einsetzen der Stromfunktion in die Rotationsfreiheit ergibt die Laplace-Gleichung für die Stromfunktion: ∂ 2Ψ ∂ 2Ψ + =0 ∂x21 ∂x22 (4.13) Es ist somit ersichtlich, dass diese Funktionen beide das Problem lösen, und gleichwertig benutzt werden können. Im nächsten Abschnitt wird die Bedeutung dieser Funktionen diskutiert, und es wird klar, dass je nach Problemart die eine oder die andere Funktion zielführend ist. Zuvor ist es jedoch sinnvoll sich Gedanken über die Potentialgleichung und deren Entstehung zu machen. In der Tat wurden für die Herleitung der Potentialgleichung nur Kontinuitätsgleichung und ac .c tr om to k lic C .c om KAPITEL 4. POTENTIALTHEORIE re U Y N Y U B to k lic C 40 k e r- s o ft w a w w ac ww ww tr di ! F- or O W t N di PD hange E ! XC or PD F- k e r- s o ft w a re F- hange E O W N ac k e r- s o ft w a Herleitung der Bernouilli-Gleichung Der Potentialansatz wird in die Navier-Stokes Gleichungen eingesetzt, unter Berücksichtigung der ∂Φ definiert. Die NavierRotationsfreiheit. Zur Erinnerung, die Potentialfunktion wurde mit ui = ∂xi Stokes Gleichungen lauten ρ ∂ui ∂p ∂ 2 uj ∂uj + ρuj =− + µ 2 − ρgj ∂t ∂xj ∂xj ∂xi Der nichtlineare Term kann durch die Rotationsfreiheit vereinfacht werden. Dafür wird die Gleichung aber von der Indexnotation in die Vektornotation gebracht. Dies ist sinnvoll, da die Rotationsfreiheit benutzt wird, welche als Kreuzprodukt definiert wurde (siehe erster Teil), was in Indexnotation sehr schnell unübersichtlich werden kann. Ein bisschen Vertiefung... Indexnotation und Vektornotation Viele physikalische Probleme können in vektorieller Notation sehr kompakt formuliert werden. In der Ingenieurwissenschaften wird aber häufig die Indexnotation verwendet, da diese eine “anschaulichere” Form bietet. In dieser Vorlesung wurde fast ausschließlich die Indexnotation benutzt, da die benötigten Operatoren in Indexform meist einfach darstellbar bleiben. In diesem Teil wird das Vektorprodukt der Geschwindigkeit und des Nablaoperators benötigt, was in Indexnotation nicht mehr so einfach darstellbar ist. Das Levi-Civita Symbol wird als 1 falls (ijk) gerade Permutation �ijk = −1 falls (ijk) ungerade Permutation 0 sonst definiert. Mithilfe dieses Symbols können die k-ten Komponenten des Vektorprodukts dargestellt werden: �a × �b = �ijk ai bj U Es ist ersichtlich, dass schon bei einem einfachen Vektorprodukt genau auf die Indizes geachtet werden muss (und hier wird ein doppeltes Vektorprodukt gebraucht). Desweiteren ist die Indexnotation om k tr Rotationsfreiheit benutzt. Diese Gleichungen enthalten keinerlei Informationen über die Zeitabhängigkeit des Problems; die Strömung hängt in keiner Weise von der Vergangenheit ab. Man kann also von einem rein kinematischen Problem reden. Allgemein werden Strömungsprobleme aber von den Navier-Stokes-Gleichungen beschrieben, welche sehr wohl von der Zeit abhängen. Die NSG bilden ein dynamisches Problem. Diese Überlegung enthält auf ersten Blick also eine gewissen Widerspruch. In der Tat erlaubt die Potentialfunktion sehr wohl die Bestimmung des Geschwindigkeitfelds im Rahmen der Potentialtheorie, die gesamte Strömung ist damit aber noch nicht beschrieben. Insbesondere Druckverteilungen müssen noch bestimmt werden, um das Problem vollständig zu beschreiben. Hier bietet es sich an die Potentialfunktion in die Navier-Stokes Gleichungen einzusetzen, um die Bernouilli-Gleichung herzuleiten. Nach diesem Schritt kann die Strömung, unter den getroffenen Annahmen (inkompressibel und rotationsfrei), vollständig beschrieben werden. 4.4.2 B to 41 lic 4.4. INKOMPRESSIBLE ROTATIONSFREIE STRÖMUNG C .c om k lic C t Y N Y U B to re . . k e r- s o ft w a w w ac ww ww tr di ! XC or O W t .c di PD hange E ! XC or PD F- re XC hange E O W t B . . nicht vom Koordinatensystem unabhängig. Das heißt, dass die Indexform des Nabla-Operators zum Beispiel in kartesischen- und in Kugelkoordinaten nicht die gleiche Form hat. Aus all diesen Gründen wird hier, und teilweise weiter im Skript, auf die Vektorschreibweise zurückgegriffen. Es werden ebenfalls die wichtigsten Operationen (Gradient, Divergenz, Laplace) vorgeführt: • Gradient: ∇f = ∂f ∂xj • Divergenz: ∇ · F = ∂Fi ∂xi • Laplace Operator: Δf = ∇2 f = ∂ 2f ∂x2i Die Navier-Stokes-Gleichungen in Vektornotaion können, mit der Potentialfunktion mit u = ∇Φ, wie folgt geschrieben werden: ρ ∂u + ρ(u · ∇)u = −∇p + µ∇2 u − ρgê2 ∂t wobei die Strömung horizontal verläuft und die Gewichtskraft senkrecht zur Strömung wirkt. Der nichtlinare Term wird nun vereinfacht: 1 ✿ = 0, rotationsfrei ✘ ✘✘ ✘× (∇ u) ρ(u · ∇)u = ρ∇�u�2 − ρu × ✘ 2 Nun kann die Potentialfunktion eingeführt werden ρ ∂∇Φ 1 + ρ∇�u�2 + ∇p + ρg∇(x2 ) = µ∇2 ∇Φ = µ∇∇2 Φ = 0 ∂t 2 Hier wurde im letzten Schritt die Laplacegleichung für die Potentialfunktion genutzt, welche in Vektornotation ∇2 Φ = 0 lautet. Abschließend können die einzelnen Gradienten der jeweiligen Terme in den Gradienten der gesamten Gleichung umgeschrieben werden: ∇(ρ ∂Φ 1 + ρ�u�2 + p + ρgx2 ) = 0 ∂t 2 Es ist somit möglich Bedingungen für den in Klammern stehenden Term abzuleiten. Falls die Strömung instationär ist, bleibt die Zeitabhängigkeit vorhanden, und wir können schreiben: ρ ∂Φ 1 + ρ�u�2 + p + ρgx2 = F (t) ∂t 2 Dies ist die instationäre Bernouilli-Gleichung. Falls die Strömung stationär ist, vereinfacht sich die Gleichung und wir erhalten die stationäre Bernouilli-Gleichung: 1 ρ�u�2 + p + ρgx2 = konst 2 Ergänzung Die Umformung der Volumenkraft wurde in der obigen Herleitung nicht detailliert erklärt. Der anfangs explizite Ausdruck für die Gewichtskraft wurde als Gradient eines Potentials umgeschrieben, um den Ausdruck später vereinfachen zu können. Die Gültigkeit des Ausdrucks g = ρg∇(x2 ) lässt sich einfach überprüfen. ac .c tr om to k lic C .c om KAPITEL 4. POTENTIALTHEORIE re U Y N Y U B to k lic C 42 k e r- s o ft w a w w ac ww ww tr di ! F- or O W t N di PD hange E ! XC or PD F- k e r- s o ft w a re F- hange E O W N 4.5 Bedeutung Potentialfunktion und Stromfunktion ∂Ψ ∂Ψ dx + dy ∂x ∂y ���� ���� −v u dΨ = −vdx + udy ac k e r- s o ft w a (4.14) (4.15) Entlang einer Linie mit konstanter Stromfunktion, wo also die Änderung der Stromfunktion null ist, gilt: 0 = −vdx + udy vdx = udy v dy = u dx ⇒ entspricht Stromlinien (4.16) (4.17) (4.18) Die Änderung der Potentialfunktion in 2D kann nun ebenfalls betrachtet werden: dΨ = ∂Φ ∂Φ dx + dy ∂x ∂y ���� ���� u v dΦ = udx + vdy (4.19) (4.20) Entlang einer Linie mit konstanter Potentialfunktion ergibt sich eine ähnlicher Zusammenhang: 0 = udx + vdy − v dx = u dy ⇒ Potentiallinien (stets orthogonal zu Stromlinien) (4.21) (4.22) Die Stromlinien können für eine Strömung mehr oder weniger intuitiv gezeichnet werden, und somit auch die Potentiallinien, welche immer orthogonal verlaufen. Anderseits lassen sich viele Strömungsformen mit Potentialfunktionen darstellen, und dadurch können auch die zugehörigen Stromlinien leicht ermittelt werden. Am Ende dieses Kapitels werden einige wichtig Potentialströmungen vorgestellt. Diese Strömungen können als „Bausteine“ fungieren, um komplexere Strömungsformen zu modellieren. Es ist zum Beispiel möglich, einen rotierenden Zylinder in einem Fluid mithilfe der Kombination von mehreren Potentialströmungen darzustellen (wie später gezeigt wird ist also möglich, Wände darzustellen). 4.6 U Eigenschaften der Stromfunktion: Volumenstrom zwischen Stromlinien Der Volumenstrom zwischen zwei Stromlinien ist konstant und ist durch die Differenz der beiden Stromfunktionen gegeben. Die Stromlinien verhalten sich also ähnlich wie impermeable Wände, und om k tr Nachdem die Potentialfunktion und die Stromfunktion mathematisch definiert wurden, soll die eigentliche Bedeutung und die graphische Darstellung dieser Funktionen diskutiert werden. Zuerst wird die räumliche Änderung der Stromfunktion im zweidimensionalen betrachtet. Dabei wird darauf hingewiesen, dass Ψ eine Funktion des Orts aber auch der Zeit ist. dΨ = B to 43 lic 4.5. BEDEUTUNG POTENTIALFUNKTION UND STROMFUNKTION C .c om k lic C t Y N Y U B to re . . k e r- s o ft w a w w ac ww ww tr di ! XC or O W t .c di PD hange E ! XC or PD F- re XC hange E O W t U B Abbildung 4.4: Potentiallinien (hellblau) und Stromlinien (dunkelblau) bei einer Kantenumströmung Abbildung 4.5: Volumenstrom zwischen zwei Stromlinien ac .c tr om to k lic KAPITEL 4. POTENTIALTHEORIE . . re C .c om Y N Y U B to k lic C 44 k e r- s o ft w a w w ac ww ww tr di ! F- or O W t N di PD hange E ! XC or PD F- k e r- s o ft w a re F- hange E O W N V̇12 = ac k e r- s o ft w a (4.23) (udy − vdx) 1 = �2 � ∂Ψ ∂Ψ dy + dx ∂y ∂x 1 = �2 � (4.24) (4.25) dΨ = Ψ2 − Ψ1 1 Die Differenz von zwei Ψ-Werte von zwei Stromlinien ist der Volumenstrom pro Tiefeneinheit. 4.7 Potential in komplexen Variablen Zweidimensionale Probleme können im Rahmen der Potentialtheorie mit dem komplexen Potential beschrieben werden. In der Tat ermöglicht die Analogie zwischen komplexer Ebene und räumlicher Ebene eine sehr anschauliche Betrachtung der Probleme. Somit ist der reelle Anteil der komplexen Koordinate die x-Richtung, der imaginäre Anteil die y-Richtung. 4.7.1 Die komplexe Potentialfunktion komplexe Ebene 2D Ebene x2 (x,y) Im(z) (a,b) ϕ z = x + iy z = a + ib r Re(z) x1 Abbildung 4.6: komplexe Koordinaten Das komplexe Potential setzt sich aus der Potentialfunktion und der Stromfunktion zusammen. F (z) = Φ + iΨ (4.26) Aus dem komplexen Potential können einige Zusammenhänge hergestellt werden, um die komplexe Geschwindigkeit herzuleiten. Der Zusammenhang zwischen Potential- und Stromfunktion wird nochmal in Erinnerung gerufen: ∂Φ ∂Ψ u= = ∂x ∂y v = ∂Φ = − ∂Ψ ∂y ∂x U Cauchy-Riemann Gleichungen (4.27) Die totale Ableitung des komplexen Potentials nach z entspricht einer partiellen Ableitung nach x, om k lic tr es gilt somit zwischen zwei Stromlinien die Kontinuitätsgleichung. �2 B 45 to 4.7. POTENTIAL IN KOMPLEXEN VARIABLEN C .c om k lic C t Y N Y U B to re . . k e r- s o ft w a w w ac ww ww tr di ! XC or O W t .c di PD hange E ! XC or PD F- re XC hange E O W t B ∂F ∂z dF ∂z ∂F dF = = = ∂x ∂z ∂x dz ���� ∂x dz (4.28) =1 ∂F ∂F ∂z dF ∂z dF =i = = ∂y ∂z ∂y dz ∂y dz ���� (4.29) =i Die Ableitung des komplexen Potentials nach z kann also mit den Geschwindigkeiten in x1 - und x2 -Richtung geschrieben werden. ∂F ∂Φ ∂Ψ ∂F = = +i = u − iv = w komplexe Geschwindigkeit (4.30) ∂z ∂x ∂x ∂x Wenn eine Strömung mit einem Potential beschrieben werden kann, können durch einfache Ableitung nach z und Trennung des Ergebnisses in Real- und Imaginärteil die Geschwindigkeitsanteile ermittelt werden. Dies ist zum Beispiel sinnvoll, wenn eine Strömung aus mehreren charakteristischen Strömungen besteht, deren Potentiale wohlbekannt sind, und das Geschwindgkeitsfeld bestimmt werden soll. Weiterhin bietet die komplexe Schreibweise eine kompakte Notation der Strömungsgrößen. Das komplexe Potential in Zylinderkoordinaten Komplexe Zahlen können sehr bequem in Exponentialform geschrieben werden, wodurch die unabhängigen Koordinaten zu Radius und Winkel werden und eine Beschreibung der physikalischen Größen in Zylinderkoodinaten erlauben. Diese Beschreibung ändert an der Strömung natürlich nichts; sie ist nur für gewisse Probleme (zB. Wirbel) besser geeignet, da unter Umständen nur noch eine Koordinate variabel ist (zB. wenn der Radius konstant bleibt). z = x1 + ix2 = reiϕ = r cos ϕ + ir sin ϕ −iϕ w = u1 − iu2 = U e = U cos ϕ − iU sin ϕ (4.31) (4.32) Die jeweiligen Ableitungen des komplexen Potentials können wieder gebildet werden ∂F (z) dF (z) ∂z dF (z) ∂(reiϕ ) dF (z) iϕ = = = e ∂r dz ∂r dz ∂r dz 1 ∂F (z) dF (z) 1 ∂z dF (z) 1 ∂(reiϕ ) dF (z) iϕ = = = ie r ∂ϕ dz r ∂ϕ dz r ∂ϕ dz (4.33) (4.34) dF (z) dF (z) ∂F (z) −iϕ Aus der ersten Gleichung kann eine Beziehung für hergeleitet werden: = e dz dz ∂r Wird nun die Definition des komplexen Potentials F = Φ + iΨ benutzt dF (z) ∂Ψ ∂ ∂Φ −iϕ = (Φ + iΨ)e−iϕ = e + ie−iϕ dz ∂r ∂r ∂r kann die komplexe Geschwindigkeit wieder mit bekannten Größen geschrieben werden (4.35) dF (z) = w(z) = ur e−iϕ − iuϕ e−iϕ = (ur − iuϕ )e−iϕ (4.36) dz Diese Form kann weiter mit der Eulerbeziehung umgeformt werden, um letztendlich den Zusammenhang zwischen u1 , u2 und ur , uϕ herzustellen. w(z) = (ur − iuϕ )e−iϕ = (ur − iuϕ )e−iϕ (cos(ϕ) − isin(ϕ)) = (ur cos(ϕ) − uϕ sin(ϕ)) − i(ur sin(ϕ) + uϕ cos(ϕ)) = u1 − iu2 (4.37) (4.38) ac .c om to k lic tr . . da 4.7.2 C .c om KAPITEL 4. POTENTIALTHEORIE re U Y N Y U B to k lic C 46 k e r- s o ft w a w w ac ww ww tr di ! F- or O W t N di PD hange E ! XC or PD F- k e r- s o ft w a re F- hange E O W N ac k e r- s o ft w a Beziehung zwischen Φ und Ψ Laut Definition der Potential- und Stromfunktionen sind diese nicht voneinander unabhängig. Vielmehr kann ein Problem mit der einen oder anderen Funktion behandelt werden. Die Potentialfunktion kann bei bekannter Stromfunktion direkt berechnet werden und umgekehrt. Diese Eigenschaft wird auch durch Cauchy-Riemann-Differentialgleichung beschrieben: ∂Φ ∂Ψ = ∂x1 ∂x2 ∂Φ = − ∂Ψ ∂x2 ∂x1 2 (4.39) Ferner soll noch eine Eingenschaft der Potentialfunktion diskutiert werden. Die Laplace-Gleichung wird durch die Anwendung des Laplace-Operators auf die Potentialfunktion gewonnen. ∇2 Φ = ∂ 2Φ ∂ 2Φ + =0 ∂x21 ∂x22 (4.40) Dass die Laplace-Gleichung immer Null ergibt ist durch die Kontinuitätsgleichung sichergestellt. Finden wir zwei Funktionen Φ1 und Φ2 , die Lösungen der Laplace-Gleichung sind, dann ist jede Linearkombination dieser Funktionen auch eine Lösung der Laplace-Gleichung (man spricht von der Linearität der Laplace-Gleichung). Bilden wir einige interessante Referenzlösungen für die Laplace-Gleichung, können wir durch Linearkombination dieser Lösungen auch komplexere Strömungen beschreiben. Im folgenden wird deshalb auf einige wichtige Potentialfuntionen eingegangen, um die Grundlage für einen solchen “Lösungsbaukasten“ zu bilden. 4.9 Ausgewählte Potentialfunktionen Es werden nun einige besonders bedeutende (zweidimensionale) Potentialströmungen vorgestellt, welche durch ihre Kombination bereits die Beschreibung einer Vielzahl an Strömungen ermöglichen. 4.9.1 Parallelströmung Die einfachste denkbare Strömung ist die Parallelströmung, welche einfache eine im Raum gleichgerichtete Geschwindigkeit besitzt. Diese kann in komplexer Form sehr leicht dargestellt werden Das komplexe Potential ist somit einfach U w = u1 − iu2 F (z) = wz (4.41) om k lic tr Die Darstellung der komplexen Geschwindigkeit in Zylinderkoordinaten ist somit natürlich mit der Darstellung in kartesischen Koordinaten äquivalent, und es können also Zusammenhänge zwischen kartesischen und zylindrischen Geschwindigkeitskomponenten aufgestellt werden (welche ansonsten auch über Projektion auf die orthonormalen Achsen hergeleitet werden können). Die Benutzung der einen oder der anderen Darstellung ist also eine problemabhängige Entscheidung, führt aber stets auf identische Ergebnisse. 4.8 B 47 to 4.8. BEZIEHUNG ZWISCHEN Φ UND Ψ C .c om k lic C t Y N Y U B to re . . k e r- s o ft w a w w ac ww ww tr di ! XC or O W t .c di PD hange E ! XC or PD F- re XC hange E O W t B Quelle und Senke Eine Quelle und eine Senke haben prinzipiell den gleichen Aufbau. Die Quelle bzw. die Senke wird als ein Punkt dargestellt, aus welchen der Massenstrom ausströmt, bzw. einströmt. Der Fluss ist in alle radialen Richtungen gleich, wobei sich die radiale Geschwindigkeit mit wachsendem Radius gemäß der Massenerhaltung verkleinert. Die tangentiale Geschwindigkeit ist dagegen null. M êr 2πr �u = bzw. ur = und ∂φ M M = →φ= ln(r) + c1 (ϕ) 2πr ∂r 2πr uϕ = 0 = voraus M 1 ∂φ → φ = c(r) = ln(r) r ∂ϕ 2πr c1 (ϕ) = 0 Somit erhalten wir die Potentialfunktion der Quelle/Senke in Zylinderkoordinaten, wobei M den Volumenstrom pro Tiefeneinheit bezeichnet: φ= M ln(r) 2π (4.42) Die entsprechende Stromfunktion kann auch sehr leicht berechnet werden und ergibt sich zu ψ= M ϕ 2π (4.43) Möchten wir das komplexe Potential aufstellen, müssen wir die Geschwindigkeit zuerst etwas umschreiben M M M êr = cos(ϕ) ê1 + sin(ϕ) ê2 �u = 2πr �2πr �� � �2πr �� � u1 u2 Wir bilden die komplexe Geschwindigkeit w = u1 − iu2 = M −iϕ M M M (cos(ϕ) − i sin(ϕ)) = e = = 2πr 2πr 2πreiϕ 2πz Womit wir letztendlich nach Integration das komplexe Potential F bilden können dF (z) =w dz F (z) = M ln(z) 2π (4.44) Es ist zu bemerken, dass der Quellpunkt selbst eine Singularität darstellt (dort ist der Logarithmus nicht definiert) und dass dort die Massenerhaltung nicht gilt (es “entsteht“ oder “verschwindet“ dort Masse). 2πφ0 Der Verlauf konstanter Potentiale ist durch konzentrische Kreise mit r = e M gegeben, der Verlauf konstanter Stromfunktionen durch vom Quellpunkt ausgehende Geraden mit ϕ = M2πψ0 . ac .c om to k lic tr . . 4.9.2 C .c om KAPITEL 4. POTENTIALTHEORIE re U Y N Y U B to k lic C 48 k e r- s o ft w a w w ac ww ww tr di ! F- or O W t N di PD hange E ! XC or PD F- k e r- s o ft w a re F- hange E O W N 4.9.3 ac k e r- s o ft w a Nun wird der schon bekannte Potentialwirbel betrachtet. Ein Potentialwirbel zeichnet sich dadurch aus, dass die tangentiale Geschwindigkeit mit wachsendem Radius kleiner wird (die radiale Geschwindigkeit ist hier null). Die maßgebende Größe für die Stärke des Wirbels ist die Zirkulation Γ. Γ êϕ 2πr Analog zur Quelle/Senke können wir die Potentialfunktion in Zylinderkoordinaten herleiten �u = Γ ϕ 2π (4.45) Γ ln(r) 2π (4.46) sowie die Stromfunktion ψ=− Weiter kann mit identischen Überlegungen wie zuvor die komplexe Geschwindigkeit w w = −i Γ 2πz (4.47) und letztendlich das komplexe Potential F hergeleitet werden: F (z) = −i Γ ln(z) 2π (4.48) Auch hier ist der Wirbelpunkt ein besonderer Punkt, da dort die Rotationsfreiheit nicht gilt. Der Verlauf konstanter Potentiale lässt sich durch vom Wirbelpunkt ausgehende Geraden mit ϕ = 2πψ0 2π darstellen, der Verlauf konstanter Stromfunktionen durch konzentrische Kreise mit r = e− Γ . Γφ0 4.9.4 Dipol Eine Dipolströmung ist bereits eine aus zwei “elementaren“ Lösungen zusammengesetzte Strömung, bei welcher eine Quelle und eine Senke mit identischer Ergiebigkeit in ein und denselben Punkt gesetzt werden (genauer genommen strebt der Abstand gegen null). Es entsteht somit eine Strömung mit Geschwindigkeiten, welche mit wachsendem Radius mit ∼ 1/r 2 kleiner werden. Ohne genauere Herleitung wird das komplexe Potential eines Dipols (oder auch Quellsenke) gegeben und die entsprechenden Geschwindigkeiten abgeleitet. F (z) = φ= µ µx1 cos(ϕ) = 2 , r x1 + x22 ur = µ ∂φ = − 2 cos(ϕ), ∂r r U µ −iϕ µ e = r z (4.49) µx2 µ ψ = − sin(ϕ) = 2 r x1 + x22 uϕ = µ 1 ∂φ = − 2 sin(ϕ) r ∂ϕ r Der Verlauf der Potentiallinien ist durch Kreise, welche die x1 -Achse tangieren gegeben, und die Stromfunktionen durch Kreise, welche die x2 -Achse tangieren. Dabei stehen alle Potentialkreise senkrecht auf den Stromkreisen! om k lic tr Potentialwirbel φ= B 49 to 4.9. AUSGEWÄHLTE POTENTIALFUNKTIONEN C .c om k lic C t Y N Y U B to re . . k e r- s o ft w a w w ac ww ww tr di ! XC or O W t .c di PD hange E ! XC or PD F- re XC hange E O W t Weitere einfache Formen Diese einfachen Beispiele können etwas erweitert werden und weitere einfache Stömungen beschreiben. Somit bilden die Potentialfunktionen der Form F (z) = z n Strömungen in Ecken und um Kanten aus. Der Fall der Parallelströmung ist also ein Sonderfall, welcher der “Umströmung“ einer unendlich dünnen Platte entspricht. Weiter kann die Kategorie der Potentialfunktionen der Form F (z) = z −n betrachtet werden. Diese werden Multipolströmungen genannt, wobei die Dipolstömung der einfachste Fall ist. Ein letzte wichtige Strömung kann mit einer Quelle/Senke und einem Potentialwirbel gebildet werden, woraus ein Strudel entsteht. 4.9.6 Anwendungsmöglichkeiten Wie bereits erwähnt lassen sich durch Überlagerung einfacher Potentiallösungen komplizierte Probleme darstellen (siehe Linearität der Laplace-Gleichung!). Diese Überlagerung kann an unterschiedlichen Punkten im Raum geschehen, insbesondere außerhalb des eigentlichen Strömungsgebiets. Das bedeutet, dass Randbedingungen, wie Impermeabilitäten, durch geeignete Platzierung von Potentiallösungen außerhalb der Strömung dargestellt werden können. Ein weitere interessanter Aspekt tritt bei der Betrachtung der Stromfunktionen auf. Da kein Fluid “durch“ eine konstante Stromlinie fließt (da die Geschwindigkeit dort immer tangential ist), kann diese als impermeable Wand aufgefasst werden, ohne dass die Strömung dadurch verändert wird. Diese Eigenschaft wird zum Beispiel genutzt um Grenzschichtströmungen mit Potentialströmungen zu koppeln. 4.10 Umströmung von Profilen ausgehend von der Zylinderumströmung Mithilfe von Potentialfunktionen können Strömungen um charakteristische Profile, wie Zylinder oder Platten, modelliert werden. Da in der Realität aber komplexere Profile eingesetzt werden, wird durch eine konforme Transformation die Potentiallösung einer bekannten Geometrie (insbesondere eines Zylinders) an das gewünschte Profil angepasst. Im Folgenden wird also auf die Idee der konformen Abbildung näher eingegangen und die Umströmung einer ebenen Platte diskutiert, als einfachste Form eines Flügelprofils. 4.10.1 B 调和转化 Konforme Abbildung Ausgehend von der Potentiallösung für die Umströmung eines Zylinders in der komplexen Ebene (mit der komplexen Koordinate ζ) transformieren wir den komplexen Raum, sodass die Transformation durch g(z) = ζ beschrieben wird. Damit ist die Lösung für das Flügelprofil durch Fprof il (z) = Fzylinder (ζ = g(z)) gegeben. Damit Fprof il (z) = Fzylinder (ζ = g(z)) auch tatsächlich eine Lösung der Laplace-Gleichung ist muss g(z) = ζ eine konforme Abbildung sein. Konforme Abbildungen haben folgende Eigenschaften: ac .c om to k lic tr . . 4.9.5 C .c om KAPITEL 4. POTENTIALTHEORIE re U Y N Y U B to k lic C 50 k e r- s o ft w a w w ac ww ww tr di ! F- or O W t N di PD hange E ! XC or PD F- k e r- s o ft w a re XC hange E O W N U B k lic tr ac k e r- s o ft w a Abbildung 4.7: Konforme Transformation eines Flügelprofils 1. winkeltreue Abbildung (Orthogonalität wird erhalten) 2. g ist eine holomorphe komplexe Funktion, was impliziert dg(z) dg(z) existiert überall und �= 0 . g � (z) = dz dz Anhand dieser allgemeinen Definition behandeln wir eine spezielle konforme Transformation, welche für die Darstellung ebener Platten geeignet ist. 4.10.2 Ebene Platte mit Anstellwinkel Für die Darstellung von Flügelprofilen ist der Einsatz der speziellen Joukowsky-Transformation geeignet. Diese ist in allgemeiner Form durch z=ζ+ R2 ζ (4.50) gegeben, mit z als komplexe Koordinate in “Flügelkoordinaten“, und R als Radius des zu transformierenden Zylinders. Eine spezielle Joukowsky-Transformation ist die Transformation eines Zylinders mit Radius R in eine Platte der Länge 4R. Wir leiten die konforme Abbildung g aus der oben eingeführten Abbildung z = G(ζ) ab, und überprüfen diese zuvor für den Fall Zylinder-Platte. Ein Kreis ist in der komlexen Ebene durch ζ = Reiϕ gegeben. Transformieren wir diesen mit der Joukowsky-Vorschrift erhalten wir z = Reiϕ + R2 = Reiϕ +Re−iϕ = Rcos(ϕ)+i Rsin(ϕ)+Rcos(ϕ)−i Rsin(ϕ) = 2Rsin(ϕ) +i ���� 0 � �� � Reiϕ x1 x2 was offensichtlich dem Gebiet zwischen -2R und 2R auf der reellen Achse, also einer unendlich dünnen Platte der Länge 4R entspricht. Um die konforme Abbildung g herzuleiten invertieren wir G, sodass g(z) = G−1 (z) = ζ. z=ζ+ √ 1 R2 → ζ 2 − zζ + R2 = 0 → ζ = (z ± z 2 − 4R2 ) ζ 2 om to 4.10. UMSTRÖMUNG VON PROFILEN AUSGEHEND VON DER ZYLINDERUMSTRÖMUNG51 C .c om k lic C t Y N Y U B to re . . k e r- s o ft w a w w ac ww ww tr di ! F- or O W t .c di PD hange E ! XC or PD F- re XC hange E O W t B . . (a) mit Kutta-Bedingung (b) ohne Kutta-Bedingung Abbildung 4.8: angestellte Platte mit und ohne Kutta-Bedingung Die Abbildung ist also bis auf das Vorzeichen festgelegt, welches wir nun aussuchen müssen. Die Vorzeichen entstehen da der Raum ζ topologisch nicht zusammenhängend ist. Es gibt einen Raum im und um den Zylinder, während der Raum z zusammenhängend ist, es gibt also nur einen Raum um das Profil. Dazu untersuchen wir beiden Fälle, und entscheiden welcher Raum transformiert werden soll. √ • Fall “+“ ζ = 12 (z + z 2 − 4R2 ), der Raum um den Zylinder wird in den Raum um die Platte transformiert, sodass wir die Potentialströmung konform transformieren. √ • Fall “-“ ζ = 12 (z − z 2 − 4R2 ), der Raum innerhalb des Zylinders wird zum Raum um die Platte transformiert, das Potentialfeld ist nicht konform. Wir suchen also das positive √ Vorzeichen aus und erhalten als konforme Transformation für eine ebene 1 Platte g(z) = ζ = 2 (z + z 2 − 4R2 ). Strömen wir nun den Zylinder unter einem Winkel α an, erhalten wir folgende Potentialfunktion als Beschreibung des Problems: Fzyl (−ζ) = U∞ ζe−iα + U∞ R2 iα Γ e −i ln(ζ) ζ 2π Mithilfe der hergeleiteten Transformation g erhalten wir die Potentialströmung in der Koordinate z √ √ z 2 − 4R2 z + Γ Fprof il (z) = U∞ zcos(α) − i (U∞ z 2 − 4R2 sin(α) − ln( )) 2π 2 und durch Differenzieren nach z auch die komplexe Geschwindigkeit w wprof il (z) = dF (z) i Γ = U∞ cos(α) − √ ) (U∞ zsin(α) + 2 2 dz 2π z − 4R Wir bemerken hier, dass für eine beliebige Zirkulation Γ die Geschwindigkeit an den Extrema eine Singularität aufweist, die Geschwindigkeit wird dort unendlich. Da dies nicht stimmen kann, muss eine Bedingung für die Zirkulation formuliert werden, sodass dieser Fall nicht eintritt. Diese Bedingung kann verbal formuliert werden und wird Kutta-Bedingung genannt. ac .c tr om to k lic C .c om KAPITEL 4. POTENTIALTHEORIE re U Y N Y U B to k lic C 52 k e r- s o ft w a w w ac ww ww tr di ! F- or O W t N di PD hange E ! XC or PD F- k e r- s o ft w a re XC hange E O W N U B k lic tr ac k e r- s o ft w a Abbildung 4.9: Cp über “chord“ an einem Flügelprofil, berechnet und gemessen Kutta-Bedingung “ Ein Flügelprofil entwickelt eine Zirkulation Γ so, dass die Geschwindigkeit an der Hinterkante des Profils endlich ist.“ Formulieren wir diese Bedingung aus erhalten wir ! wprof il (z = 2R) = endlich → √ i Γ (2RU∞ sin(α) + ) → Γ = −4πU∞ Rsin(α) 2π� z 2 − 4R2 � �� ! =0 Aus der Analogie mit dem Zylinder können wir für das Plattenprofil die wirkenden Kräfte berechnen, welche sich in die Auftriebskraft senkrecht zur Anströmung und Widerstandskraft in die Anströmungsrichtung aufteilen. Aus diesen Kräften lassen sich Kennzahlen für Widerstände, wie die cp -Zahl für den Druck, definieren und entlang eines Flügelprofils darstellen. Es wird insbesondere in windfesten Systemen, bei denen w � = 0 ist, gearbeitet. Die Auftriebskraft lässt sich zu 2 �A� = ρU∞ Γ = 4πρU∞ Rsin(α) berechnen. Die cp -Zahl kann entlang des Profils dargestellt werden, insbesondere entlang der normalisierten Länge, welche als “chord“ bezeichnet wird und in Prozent angegeben wird. Abbildung 4.8 zeigt einen solchen Verlauf. Es ist ebenfalls möglich hiermit Strömungsablösungen zu visualisieren. Bei der Platte löst die Strömung bei einer Anströmung unter mehr als 45◦ ab. om to 4.10. UMSTRÖMUNG VON PROFILEN AUSGEHEND VON DER ZYLINDERUMSTRÖMUNG53 C .c om k lic C t Y N Y U B to re . . k e r- s o ft w a w w ac ww ww tr di ! F- or O W t .c di PD hange E ! XC or PD F- re XC hange E O W t U B ac .c tr om to k lic KAPITEL 4. POTENTIALTHEORIE . . re C .c om Y N Y U B to k lic C 54 k e r- s o ft w a w w ac ww ww tr di ! F- or O W t N di PD hange E ! XC or PD F- k e r- s o ft w a re