Geregelte Antriebe mit Drehfeldmaschinen
und selbstgeführten Stromrichtern
Ausgabe 2019
iS
M
DF
ng
ra
u St
/2
ud
/2
ud
Rd
st.
An
iN
uN
Felix Jenni
1
Inhaltsverzeichnis
1 Einleitung
14
2 Elektromechanische Grundlagen
2.1 Mechanische Drehzahl und Drehmoment . . . . . . . . . . . . . . .
18
20
3 Die fremderregte Gleichstrommaschine
3.1 Aufbau und elektrisches Modell . . . . . .
3.2 Struktur eines geregelten GM-Antriebes .
3.2.1 Verfahren zur Reglerauslegung . .
3.2.2 Stationäre Arbeitsbereiche der GM
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
23
. 23
. 25
. . 25
. . 26
4 Beschreibungen von Drehfeldmaschinen
27
4.1 Grundprinzip der DFM . . . . . . . . . . . . . . . . . . . . . . . . 28
4.1.1 Von den Statorströmen zur magnetischen Flussdichte . . . . . . 29
4.1.2 Polpaarzahl . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.1.3 Maschinendarstellung mit bezogenen Grössen . . . . . . . . . 34
4.1.4 Wirkungsgrad von Drehfeldmaschinen . . . . . . . . . . . . . 35
4.2 Asynchronmaschinen im stationären Betrieb . . . . . . . . . . . . . 36
4.2.1 Funktionsprinzip der Asynchronmaschine . . . . . . . . . . . . 36
4.2.2 Ersatzschaltung der ASM . . . . . . . . . . . . . . . . . . . . 39
4.2.2.1 Vereinfachte Ersatzschaltungen der Kurzschlussläufer-ASM
43
4.2.2.2 Nichtidealitäten in der Ersatzschaltung . . . . . . . . . 45
4.3 Raumzeigerdarstellung von DFM . . . . . . . . . . . . . . . . . . . 47
4.3.1 Raumzeiger . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.3.1.1 Umrechnung zwischen Klemmengrössen und Zeigern . 49
4.3.1.2 Tansformationen zwischen Koordinatensystemen . . . . 50
4.4 Asynchronmaschine in Raumzeigerdarstellung . . . . . . . . . . . . 53
4.4.0.1 Voraussetzungen für die RZ-Darstellung . . . . . . . . 53
4.4.1 Gleichungen im stillstehenden Koordinatensystem . . . . . . . 54
4.4.1.1 Interpretation von Spannungs- und Flussgleichungen . . 55
4.4.1.2 Interpretation von Drehmoment- und Drehzahlgleichung 56
4.4.2 Darstellung der Gleichungen für Simulationen . . . . . . . . . 57
4.4.2.1 ASM mit Spannungsspeisung . . . . . . . . . . . . . . 57
4.4.2.2 ASM mit Stromspeisung . . . . . . . . . . . . . . . . . 59
4.4.2.3 Anwendungsbeispiele in statorfester-Darstellung . . . . 59
4.4.3 ASM-Gleichungen im rotierenden Koordinatensystem . . . . . 60
4.4.3.1 Flussorientierte Koordinatensysteme . . . . . . . . . . 61
4.5 Synchronmaschine in Raumzeigerdarstellung. . . . . . . . . . . . . 62
4.5.1 Vollständiges Gleichungssystem . . . . . . . . . . . . . . . . . 63
4.5.1.1 Interpretationen der Gleichungen . . . . . . . . . . . . 65
4.5.1.2 Einfluss der Dämpferwicklungen . . . . . . . . . . . . 65
4.5.2 Vereinfachte Gleichungen für die Anwendung . . . . . . . . . 66
Inhaltsverzeichnis
4.5.2.1 SM mit Stromspeisung . . . . . . . .
4.5.2.2 Klemmengrössen - dq-Komponenten
4.6 Synchronmaschinen im stationären Betrieb . . . . .
4.7 Anspeisung von DFM . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5 Stromrichter und Frequenzumrichter
5.1 Leistungshalbleiter für SR mit Spannungszwischenkreis . . . . . .
5.1.1 Ideale Schaltelemente . . . . . . . . . . . . . . . . . . . .
5.1.2 Dioden . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.3 Ein- und ausschaltbare Leistungshalbleiter . . . . . . . . .
5.2 Ansteuerung und Schutz von spannungsgesteuerten Halbleitern . .
5.2.1 Ansteuerung von IGBT und FET . . . . . . . . . . . . . .
5.2.2 Überspannungs- und Überstromschutz . . . . . . . . . . . .
5.2.3 RC-Glieder (Snubber) als Schutz in einem Brückenzweig .
5.3 Verluste und Kühlung von Leistungshalbleitern . . . . . . . . . .
5.3.1 Verlustbestimmung . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Erwärmung von Halbleitern . . . . . . . . . . . . . . . . .
5.4 Stromrichter-Bauformen. . . . . . . . . . . . . . . . . . . . . . .
5.4.1 Anforderungen auf der Netzseite . . . . . . . . . . . . . . .
5.4.2 Schaltungen für die Netzseite . . . . . . . . . . . . . . . .
5.4.3 Ein- und dreiphasige Diodenbrücken . . . . . . . . . . . .
5.4.3.1 Näherungen für die Berechnungen . . . . . . . . . .
5.4.3.2 Dioden- und Kondensatorströme . . . . . . . . . .
5.4.3.3 Begrenzung der Zwischenkreisspannung . . . . . .
5.4.4 Anforderungen auf der Maschinenseite . . . . . . . . . . .
5.4.5 Schaltung für die Maschinenseite . . . . . . . . . . . . . .
5.4.6 Standard SR-Kombination . . . . . . . . . . . . . . . . . .
5.4.7 Leistungen und Wirkungsgrad bei FU . . . . . . . . . . . .
5.5 Der selbstgeführte dreiphasige SR. . . . . . . . . . . . . . . . . .
5.5.1 Zeitdiskrete Beschreibung . . . . . . . . . . . . . . . . . .
5.5.1.1 Beschreibung mittels Drehzeigern . . . . . . . . . .
5.5.2 Zeitkontinuierliche Beschreibung . . . . . . . . . . . . . .
5.5.2.1 Die Modulationsfunktion m(t) . . . . . . . . . . . .
5.6 Modulator und Steuerverfahren für dreiphasige SR . . . . . . . . .
5.6.1 Grundfrequenzsteuerung . . . . . . . . . . . . . . . . . . .
5.6.2 Trägerverfahren . . . . . . . . . . . . . . . . . . . . . . .
5.6.2.1 Erzeugen der Schaltsignale . . . . . . . . . . . . .
5.6.2.2 Sollwert- und Trägersignale bei dreiphasiger PWM .
5.6.2.3 Realisierung von Modulatoren . . . . . . . . . . . .
5.6.3 Drehzeigermodulation . . . . . . . . . . . . . . . . . . . .
5.6.3.1 Realisierung eines Drehzeigermodulators . . . . . .
5.7 Selbstgeführte SR als Stromquelle . . . . . . . . . . . . . . . . .
. . 68
. . 69
. 70
. 73
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
77
78
. 78
. 80
. 81
83
. 83
. 85
. 86
89
. 89
. 91
95
. 95
. 95
. 98
100
101
102
103
105
105
106
107
108
110
111
112
114
115
116
117
118
121
121
122
125
2
3
Inhaltsverzeichnis
5.7.1 Reglerstrukturen . . . . . . . . . . . . . . . . . . . . . . . . 127
5.7.1.1 Regelstruktur im statorfesten ab-System (Drehzeiger) 128
5.7.1.2 Regelung im rotierenden xy-System (Festzeiger) . . . 129
5.7.2 Modellierung der Maschinen für die Auslegung der Stromregelung
132
5.7.2.1 Darstellung der ASM . . . . . . . . . . . . . . . . . 132
5.7.2.2 Darstellung der SM . . . . . . . . . . . . . . . . . . 134
6 Regelverfahren für Drehfeldmaschinen
6.1 Drehzahlregelung der Asynchronmaschine . . . . . . . . . . . . . .
6.1.1 Spannungs-Frequenzsteuerung der ASM . . . . . . . . . . .
6.1.1.1 Nenn-Flussbereich: . . . . . . . . . . . . . . . . . .
6.1.1.2 Feldschwächung . . . . . . . . . . . . . . . . . . . .
6.1.1.3 Drehzahl bei Spannungs-Frequenz-Steuerung . . . . .
6.1.2 Strom-Rotorfrequenz-Steuerung der ASM . . . . . . . . . . .
6.1.3 Direkte Flussführung . . . . . . . . . . . . . . . . . . . . . .
6.1.3.1 Prinzip der direkten Statorfluss- und Momentregelung
6.1.3.2 Direkte Selbstregelung der ASM . . . . . . . . . . .
6.1.4 Rotorflussorientierte Regelung der ASM . . . . . . . . . . .
6.2 Drehzahlregelung der Synchronmaschine . . . . . . . . . . . . . . .
6.2.0.1 Feldschwächung bei SM . . . . . . . . . . . . . . . .
6.2.1 SM-Darstellung für verschiedene Regelkonzepte . . . . . . .
6.2.1.1 Bestimmung der Polradlage (t) . . . . . . . . . . . .
6.2.2 Spannungs-Frequenz-Steuerung . . . . . . . . . . . . . . . .
6.2.2.1 Statorspannung gleich der Polradspannung . . . . . .
6.2.2.2 Statorspannung für ‘minimalen’ Statorstrom . . . . .
6.2.2.3 Erweiterungen und Bemerkungen . . . . . . . . . . .
6.2.3 Drehzahlregelung mit unterlagerter Momentsteuerung . . . .
6.2.3.1 Statorstrom in Funktion des Drehmomentes . . . . . .
6.2.3.2 Minimaler Statorstrom . . . . . . . . . . . . . . . . .
6.2.3.3 Minimale Statorblindleistung . . . . . . . . . . . . .
6.3 Elektronisch kommutierte Maschinen . . . . . . . . . . . . . . . . .
6.3.1 Aufbau der Gleichstrommaschinen . . . . . . . . . . . . . .
6.3.2 DFM mit rechteckförmiger Flussdichte . . . . . . . . . . . .
6.3.2.1 Anspeisung der Maschinen . . . . . . . . . . . . . .
6.3.2.2 Steuerung und Betriebsverhalten . . . . . . . . . . .
135
137
138
138
143
143
145
147
147
151
154
158
159
159
161
162
162
163
164
165
166
167
168
170
170
172
175
176
A Grundlagen und Ergänzungen
A.1 Kennlinien verschiedener typischer Lasten . . . . . . . . . . . .
A.1.1 Grössen der Asynchronmaschine in Funktion der Frequenz
A.2 Drehzeiger, Festzeiger und Raumzeiger. . . . . . . . . . . . . .
A.2.1 Drehzeiger . . . . . . . . . . . . . . . . . . . . . . . . .
180
180
182
184
184
.
.
.
.
.
.
.
.
Inhaltsverzeichnis
A.2.2 Festzeiger, komplexe Wechselstromrechnung .
A.2.2.1 Leistungsberechnung mit Festzeigern: .
A.2.3 Raumzeiger . . . . . . . . . . . . . . . . . . .
A.2.3.1 Leistungen in Raumzeigerdarstellung .
A.2.4 Vergleich Raumzeiger - Festzeiger . . . . . .
B Literatur
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
185
186
187
188
188
189
C Übungen
191
C.1 Identifikation von Maschinen . . . . . . . . . . . . . . . . . . . . . 191
C.1.1 Gleichstrommaschine: Identifikation und Regelung . . . . . . 192
C.1.1.1 Bestimmen der Elemente der GM-Ersatzschaltung . . 193
C.1.1.2 Übertragungsfunktionen der GM . . . . . . . . . . . 193
C.1.1.3 Ankerstrom und Drehzahlregler für eine GM . . . . . 193
C.1.2 Käfigläufer - Asynchronmaschine . . . . . . . . . . . . . . . 194
C.1.2.1 Bestimmen der Elemente der ASM-Ersatzschaltung . 195
C.1.2.2 Simulation von Drehmoment und Strom der ASM . . 195
C.1.3 Synchronmaschinen . . . . . . . . . . . . . . . . . . . . . . 196
C.1.3.1 Schenkelpol-SM als Mustermaschine . . . . . . . . . 197
C.1.3.2 Bestimmen der Elemente der SM-Ersatzschaltung . . 198
C.1.3.3 Erregerkreis . . . . . . . . . . . . . . . . . . . . . . 198
C.2 Drehfeld und Raumzeiger . . . . . . . . . . . . . . . . . . . . . . . 199
C.2.1 Erzeugung eines Drehfeldes . . . . . . . . . . . . . . . . . . 199
C.2.2 Zeigerdarstellung eines Drehfeldes . . . . . . . . . . . . . . 201
C.2.3 Koordinatentransformationen . . . . . . . . . . . . . . . . . 202
C.2.3.1 uvw->ab-Koordinatentransformation . . . . . . . . . 202
C.2.3.2 Umrechnungen zwischen zwei Koordinatensystemen . 202
C.3 Maschinendarstellung mit Raumzeigern . . . . . . . . . . . . . . . 203
C.3.1 Asynchronmaschinen . . . . . . . . . . . . . . . . . . . . . . 203
C.3.1.1 Strom, Fluss, Drehmoment im ab- Koordinatensystem 203
C.3.1.2 Spannungsgespeiste ASM in verschiedenen Koordinatensystemen 203
C.3.2 Synchronmaschinen . . . . . . . . . . . . . . . . . . . . . . 204
C.3.2.1 Klemmenspannung der Synchronmaschine . . . . . . 204
C.3.2.2 Blockschaltung des Erregerkreises der SM . . . . . . 204
C.3.2.3 SM -Blockschaltung bei Ld=Lq . . . . . . . . . . . . 204
C.4 Gleichrichter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
C.5 Auslegung eines Stromrichters . . . . . . . . . . . . . . . . . . . . 206
C.5.1 Ansteuerung / Kühlung . . . . . . . . . . . . . . . . . . . . . 206
C.5.2 RC-Entlastung (Snubber) . . . . . . . . . . . . . . . . . . . 208
C.6 Stromrichter mit Grundfrequenzsteuerung . . . . . . . . . . . . . . 209
C.7 Stromrichter mit zeitkontinuierlicher Modulation. . . . . . . . . . . 211
4
5
Inhaltsverzeichnis
C.8 Stromregelungen. . . . . . . . . . . . . . . . . . . . . .
C.8.1 Stromregelung in -Koordinaten . . . . . . . . .
C.8.2 Stromregelung in dq-Koordinaten . . . . . . . . .
C.9 Spannungs-Frequenz-Steuerung einer ASM . . . . . . .
C.10Direkte Flussführung . . . . . . . . . . . . . . . . . . .
C.11Fluss-und Drehzahl-Berechnung für eine ASM-Regelung
C.12Sanftanlauf einer Asynchronmaschine . . . . . . . . . .
C.13SM geregelt auf (fast) minimalen Statorstrom . . . . . .
C.14Elektronisch kommutierte Maschine . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
212
212
212
213
215
216
217
218
219
D Musterlösungen
221
D.1 Identifikation von Maschinen . . . . . . . . . . . . . . . . . . . . . 221
D.1.1 Gleichstrommaschine . . . . . . . . . . . . . . . . . . . . . 221
D.1.1.1 Bestimmen der Elemente der GM-Ersatzschaltung . . 221
D.1.1.2 Übertragungsfunktionen der GM . . . . . . . . . . . 222
D.1.1.3 Ankerstrom und Drehzahlregler . . . . . . . . . . . . 222
D.1.2 Käfigläufer - Asynchronmaschine . . . . . . . . . . . . . . . 223
D.1.2.1 Bestimmen der Elemente der ASM-Ersatzschaltung . 223
D.1.2.2 Simulation von Drehmoment und Strom der ASM . . 224
D.1.3 Synchronmaschinen . . . . . . . . . . . . . . . . . . . . . . 224
D.1.3.1 Erregerkreis . . . . . . . . . . . . . . . . . . . . . . 225
D.2 Drehfeld und Raumzeiger . . . . . . . . . . . . . . . . . . . . . . . 227
D.2.1 Erzeugung eines Drehfeldes . . . . . . . . . . . . . . . . . . 227
D.2.2 Zeigerdarstellung eines Drehfeldes . . . . . . . . . . . . . . 228
D.2.3 Koordinatentransformationen . . . . . . . . . . . . . . . . . 229
D.2.3.1 uvw->ab-Koordinatentransformation . . . . . . . . . 229
D.2.3.2 Umrechnungen zwischen zwei Koordinatensystemen . 229
D.3 Maschinendarstellung mit Raumzeigern . . . . . . . . . . . . . . . 231
D.3.1 Asynchronmaschinen . . . . . . . . . . . . . . . . . . . . . . 231
D.3.1.1 Strom, Fluss, Drehmoment im ab- Koordinatensystem 231
D.3.1.2 Spannungsgespeiste ASM in verschiedenen Koordinatensystemen 232
D.3.2 Synchronmaschinen . . . . . . . . . . . . . . . . . . . . . . 233
D.3.2.1 Klemmenspannung der Synchronmaschine . . . . . . 233
D.3.2.2 Blockschaltung des Erregerkreises der SM . . . . . . 234
D.3.2.3 SM -Blockschaltung bei Ld=Lq . . . . . . . . . . . . 234
D.4 Gleichrichter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
D.5 Auslegung eines Stromrichters . . . . . . . . . . . . . . . . . . . . 238
D.6 Stromrichter mit Grundfrequenzsteuerung . . . . . . . . . . . . . 242
D.7 Stromrichter mit zeitkontinuierlicher Modulation. . . . . . . . . . . 243
D.8 Stromregelungen. . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
D.8.1 Stromregelung in -Koordinaten . . . . . . . . . . . . . . . 244
Inhaltsverzeichnis
D.8.2 Stromregelung in dq-Koordinaten . . . . . . . . .
D.9 Spannungs-Frequenz-Steuerung einer ASM . . . . . . .
D.10Direkte Flussführung . . . . . . . . . . . . . . . . . . .
D.11Fluss-und Drehzahl-Berechnung für eine ASM-Regelung
D.12Sanftanlauf einer Asynchronmaschine . . . . . . . . . .
D.13SM geregelt auf (fast) minimalen Statorstrom . . . . . .
D.14Elektronisch kommutierte Maschine . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
244
246
248
249
250
251
251
6
7
8
Verzeichnis der verwendeten Symbole
Darstellung von Spannungen und Strömen
i, u
î, û
i, u
I, U
Id, Ud
i, u
î, û
I, U
i, u
i, u
id/q, ud/q
Momentanwerte
Amplituden (Scheitelwerte)
kurzzeitige Mittelwerte
Effektivwerte (quadratische Mittelwerte) auch Ieff, Ueff
lineare Mittelwerte von Gleichgrössen (im Zwischenkreis)
Momentanwerte der -ten Harmonischen
Amplitude der -ten Harmonischen
komplexe Darstellung von Wechselgrössen
Drehzeiger (Momentanwerte)
Komponenten der Drehzeiger
Komponenten der Festzeiger
Formel- und Schaltplanzeichen
A
a, a2
B
C
Cd
CF
D
d, q
e
f
fL
fN
fT
fTast
f1
G
IB
Im(x)
i
iC
id
Amplitude
Drehoperatoren
Induktion, magnetische Flussdichte
Kapazität; Konstante
Zwischenkreiskapazität
Filterkapazität
Diode
Achsen in der Festzeigerebene
Gegenspannung
Frequenz
Frequenz im Lastkreis
Netzfrequenz
Trägerfrequenz
Abtastfrequenz
Grundfrequenz
Übertragungsfunktion
Bezugswert für die Ströme
Imaginärteil der Grösse x
Strom
Kondensatorstrom
Zwischenkreisstrom
9
Verzeichnis der verwendeten Symbole
iL
iN
iR/S
iU/V/W
iStr
J
j
K, k
kP,I,D
L
Ld
Ld,q
LS
Lh
LR
L
m
m
M
MB
Mel
Mme
MLast
n
P
P
Pd
PL
Pme
PN
p.u.
Q
QL
QN
R
Re(x)
RFe
RN
RR/S
Rme
SU/V/W
S
SL
SN
S1...S6
Laststrom
Netzstrom
Strom im Rotor bzw. Stator bei Drehstrommaschinen
Ausgangsströme in den Brückenzweigen U,V bzw. W
Drehzeiger der Stromrichter-Phasenströme
Massenträgheitsmoment
komplexer Operator
Konstante, konstant
Regelkoeffizienten bei PID-Reglern
Induktivität
Zwischenkreisinduktivität
Längs- und Querinduktivität
Statorinduktivität
Hauptinduktivität
Rotorinduktivität
Streuinduktivität
Masse
Modulationsfunktion
Modulationsgrad
Bezugswert für das elektrische Drehmoment
elektrisches Drehmoment
mechanisches Drehmoment
Lastmoment
Übersetzungverhältnis
Polpaarzahl
zeitlicher Mittelwert der Leistung, Wirkleistung
Leistung im Zwischenkreis
Wirkleistung im Lastkreis
mechanische Leistung
Wirkleistung im Netz
per unit (bezogene Grössen)
Blindleistung; Betriebsquadrant
Blindleistung im Lastkreis
Blindleistung im Netz
ohmscher Widerstand
Realteil der Grösse x
Eisenverlustwiderstand
ohmscher Anteil der Netzimpedanz
Rotor- und Statorwiderstand bei Drehstrommaschinen
’Last’ im elektrischen Modell der ASM
Umschalter im Brückenzweig U, V bzw. W
Scheinleistung
Scheinleistung im Lastkreis
Scheinleistung im Netz
/3-Sektoren in der Drehzeigerebene, begrenzt durch 1U...6U
10
s
sU/V/W
T
TT
TTast
T1
t
tE
t0...t7
U
UB
0
U...7U
u
Ud, ud
uG
uL
uN
uN0
uR/S
uU0/V0/W0
uU/V/W
uUV/VW/WU
uSoll
uStr
uq
v
W
X
Xd, Xq
x
x,y
xT
xSoll
Z
0Z...7Z
zStr
Schaltfunktion; Laplaceoperator; Sekunde; Weg; Schlupf
Schaltfunktion der Umschalter in den Brückenzweigen U, V bzw. W
Periodendauer
Periode der Trägerfrequenz
Periode des Abtastfrequenz
Periode der Grundschwingung
Zeit
Einschaltzeit
Einschaltzeiten der Stromrichterzustände 0Z...7Z
Umdrehung
Bezugswert für Spannungen
Diskrete Spannungszustände am Stromrichter in Drehzeigerdarstellung
Spannung
Mittel- und Momentanwert der Zwischenkreisspannung
Gleichtaktspannung
Lastspannung
Netzspannung
Sternpunkt(-Nullpunkt)-Spannung
Spannungen im Rotor bzw. Stator bei Drehstrommaschinen
Mittelpunktspannungen bei der dreiphasigen Brückenschaltung
Phasenspannungen bei der dreiphasigen Brückenschaltung
verkettete Spannungen bei der dreiphasigen Brückenschaltung
Sollwert der Spannung
Drehzeiger der Stromrichter-Mittelpunkt- und Phasenspannungen
Spannung über der Hauptinduktivität der ASM
Geschwindigkeit
Energie
Reaktanz
Längs- und Querreaktanz bei Synchronmaschinen
allgemeines Signal; Hilfsgrösse
Achsen eines beliebigen Koordinatensystems
Trägersignal
Sollwertsignal
Impedanz
Diskrete Stromrichterzustände (entsprechend 0U...7U)
Variable für den Stromrichter-Zustand
u/i
Soll
Achsen in der Drehzeigerebene
Winkel zwischen Koordinatensystemen
Ordnungszahl der Harmonischen
Wirkungsgrad
Phasenwinkel; Drehwinkel
Phasenwinkel der Spannung bzw. des Stromes
Phasenwinkel des Sollwertes
Phasenwinkel des Flusses
11
Verzeichnis der verwendeten Symbole
R/S,h
B
k
me
R/S
1
Rotor- bzw. Statorflussverkettung, Hauptflussverkettung
Polradwinkel bei der Synchronmaschine
Kreisfrequenz
Bezugswert für Kreisfrequenz
Kreisfrequnez des Koordinatensystems
Kreisfrequenz des Flusses
Kreisfrequenz der Welle bei Drehstrommaschinen
Rotor- bzw. Statorkreisfrequenz
Kreisfrequenz der Grundschwingung
Häufig verwendete Indices
A, E
B
d
D, Q
d, q
E
el
F
G
h
Ist
K
L
M
m
max
min
me
N
N
n
P
R
S
Soll
Str
T
Tast
tot
U, V, W
V
Anker, Erregung bei Gleichstrommaschinen
Bezugswert
Gleichgrössen (Zwischenkreis)
Dämpfer-Komponenten bei Synchronmaschinen
d- bzw. q-Komponente von Festzeigern; Längs- Quer bei Synchronmaschinen
Erregung, Eingang
elektrisch
Feld
Gleichtaktkomponente; Getriebe
Hauptinduktivität
Istwert
Koordinatensystem
Lastkreis
Moment
Magnetisierung
Maximalwert
Minimalwert
mechanisch
Netz
Sternpunkt
Nennwert
Polrad
Rotor
Stator; Schalter
Sollwert
Stromrichter
Träger
Abtastung
Total
Brückenzweig in dreiphasigen Schaltungen; Phasenbezeichnung
Verlust
0
Mittelpunkt des Zwischenkreises (Nullpunkt); Leerlauf
12
- bzw. -Komponente von Drehzeigern
Pasenwinkel des Sollwertes bei Drehzeigermodulation
Luftspalt
Streuung
Ordnungszahl von Harmonischen
Fluss
Allgemeine Begriffe und Abkürzungen
AC, ac
ASM
DC, dc
DFM
GR
PWM
PID
SM
WR
x’
x*
Wechselgrösse
Asynchronmaschine
Gleichgrösse
Drehfeldmaschine
Gleichrichter
Pulsweitenmodulation
Proportional- Integral- Differential- Regler
Synchronmaschine
Wechselrichter
Ersatzgrösse für x
konjugiert-komplexer Zeiger zu x
13
Verzeichnis der verwendeten Symbole
Teil I
Geregelte Antriebe mit Drehfeldmaschinen
und selbstgeführten Stromrichtern
1 Einleitung
Die Geschichte der stromrichtergespeisten Antriebe begann mit den mit Quecksilberdampf gefüllten Röhren. Diese Thyratron-Stromrichter sind heute fast vollständig ausgestorben. Ihre Nachfolger waren die Thyristor-Stromrichter. In grossen Stückzahlen und
in einem weiten Leistungsbereich wurden mit netzgeführten dreiphasigen ThyristorBrücken Gleichstrommotoren gespeist. Mit dieser Bauform liessen sich einfach zu regelnde, robuste Antriebe aufbauen. Ihr gewichtigster Nachteil war der Verschleiss von
Bürsten und Kollektor der Gleichstrommaschine. Daneben wurden und werden auch
Drehfeldmaschinen mit Thyristorschaltungen gespeist. Heute sind das noch immer Synchronmaschinen mit netz- und lastkommutierten Stromrichtern bei grossen Leistungen
bzw. speziellen Einsatzgebieten.
Mit der Verfügbarkeit von abschaltbaren Halbleitern (Bipolartransistoren, Feldeffekttransistoren, Insulated-Gate Bipolar-Transistoren und Gate-Turn-Off Thyristoren) in einem grossen Leistungsbereich lassen sich die positiven Eigenschaften von selbstgeführten Stromrichtern und Drehfeldmaschinen kombinieren:
-
hohe Reaktionsgeschwindigkeit des Stromrichters
Stromrichter, die sich wie eine Spannungs- oder Stromquelle verhalten
sinusförmige Ströme (mit Filtern auch Spannungen) auf der Lastseite
die Möglichkeit, auch auf der Netzseite sinusförmige Ströme zu beziehen
preisgünstige Maschinen mit hoher Leistungsdichte
Die aufgezählten ‚Hardware‘-Vorteile bedingen entsprechende Regelstrategien, damit
die Vorteile auch genutzt werden können. Dazu werden mathematische Modelle der zu
regelnden Strecke, d.h. Stromrichter, Maschine und Last benötigt.
Der vorliegende Text behandelt die Darstellung von Drehfeldmaschinen mittels Raumzeigern. Damit lässt sich das stationäre und das dynamische Verhalten der Maschinen
sehr handlich modellieren. Anschliessend werden die Beschreibung von Stromrichtern
und Steuerverfahren betrachtet. Auf diesen Grundlagen aufbauend lassen sich Regelstrategien für Antriebe herleiten.
Viele Regelkonzepte sind sehr ähnlich zu denen, wie sie schon sehr lange für fremderregte Gleichstrommaschinen-Antriebe eingesetzt werden. Zum besseren Verständnis
wird deshalb punktuell auf diese einfachste Form eines Antriebes zurückgegriffen. Im
Sinne einer Repetition wird dazu eingangs ein Gleichstrommotor-Antrieb vorgestellt.
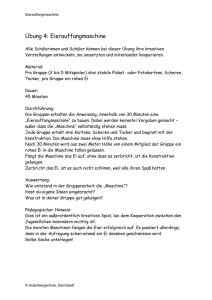
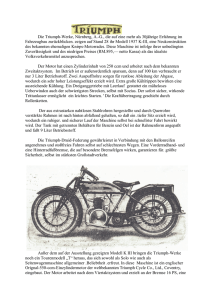
Struktur eines Antriebes mit selbstgeführtem Stromrichter: Einen ersten Eindruck
über die mögliche Struktur eines modernen, flexiblen Antriebes mit Spannungszwischenkreis vermittelt Bild 1.1.
netzseitiger
Stromrichter
Netz
ud
lastseitiger
Stromrichter
DFM
Steuersignale
ud,Soll
+
ud
iN
udRegler
+
Steuersatz
-
iN,Soll
Stromregler
unterlagerter Regelkreis
überlagerter Regelkreis
Bild 1.1.
Steuersatz
Stromregler
-
iL
+
iL,Soll
M-, n-, xRegler
x
-
xSoll
+
unterlagerter Regelkreis
überlagerter Regelkreis
Blockdiagramm von Stromrichter, Antrieb und Regelung
Die Bauform erlaubt Vier-Quadranten-Betrieb, d.h. die Leistung kann vom Netz in die
Drehfeldmaschine und umgekehrt fliessen; die Maschine kann bei positiver und negativer Drehrichtung als Motor oder als Generator betrieben werden. Mit geeigneter Steuerung der beiden Stromrichter werden die Ströme in der Maschine und im Netz nahezu sinusförmig. Die unterlagerten Regelkreise sind für beide Seiten als Stromregelkreise ausgelegt. Sie regeln Amplitude und Form der Ströme. Der überlagerte Regler auf der Netzseite hält die Zwischenkreisspannung ud konstant. Der äussere Regler auf der Maschinenseite kann als Drehmoment-, Drehzahl-, oder auch als Positionsregler ausgelegt sein.
16
Die vorgestellte Struktur hat mit verschiendenen Anpassungen bzw. Vereinfachungen
weite Marktsegmente erobert. Obwohl sie schon lange laufen, sind die Entwicklungen
der eingesetzten Maschinen, Stromrichter und Regelkonzepte bei weitem noch nicht abgeschlossen.
Adressaten des Textes: Konzipiert ist der Text in erster Linie als Lehrbuch für Universitäten, Hochschulen und Technikerschulen. Weiter sind Entwicklerinnen und Entwickler, sowie Anwenderinnen und Anwender in der Praxis angesprochen, die Antriebe verstehen, analysieren, anpassen oder neu auslegen wollen.
Von den Lesern wird angenommen, dass sie in verschiedenen Sachgebieten über
Grundlagenkenntnisse verfügen:
- Allgemeine Elektrotechnik
- Allgemeine Mathematikkenntnisse, Differential- und Integralrechnung,
sowie komplexe Wechselstromrechnung
- Physik, insbesondere Mechanik
- Grundlagenkenntnisse der wichtigsten elektrischen Maschinen
- Konventionelle Regeltechnik, PID-Regler - Auslegung
- Computer - Simulation
Leserinnen und Leser sollen sich auf keinen Fall durch die obige Liste von der Lektüre
abschrecken lassen: Auch wenn bei einzelnen Themen die Voraussetzungen nicht ganz
so gut sind, so ist mit einem guten Vorstellungsvermögen praktisch alles verständlich.
Wie immer werden den Studierenden Hilfen durch die Lehrenden das Lernen erleichtern - das Verstehen des Textes im Selbststudium ist aber möglich! Ganz allgemein sollen
alle Interessierten, die sich in diesem interessanten Gebiet weiterbilden möchten, zur
Lektüre ermuntert werden.
Ziel und Aufbau des Textes: Ziel ist es, in kompakter und doch lesbarer Form Antriebe
mit Stromrichtergespeisten Maschinen so einzuführen, dass die Leser befähigt sind, die
wichtigsten Bauformen im Detail zu verstehen und auch auszulegen. Es ist bewusst kein
breites Werk über Antriebe und Stromrichter. Eingeführt und behandelt wird, was in der
Praxis Bedeutung erlangt hat, beziehungsweise direkt zur Arbeit benötigt wird. Auf weitere, ebenfalls interessante Fälle wird nicht eingegangen.
Herleitungen, die nicht direkt zum Verständnis notwendig sind, werden kurz gehalten.
Ausgewählte Themen sind im Anhang nochmals ausführlicher dargestellt. Für noch weiterführende Informationen sei aber auf die Literatur verwiesen.
Übungen: Zur Verarbeitung des Stoffes sind Übungen immer sehr hilfreich. Unter der
Überschrift Übungen ist eine Auswahl zusammengestellt. Diese sind als Teil der entsprechenden Kapitel konzipiert und enthalten auch weiterführende Informationen. Die selbständige Bearbeitung wird sehr empfohlen!
17
2 Elektromechanische Grundlagen
Die prinzipielle Wirkungskette von linearen und rotierenden elektrischen Maschinen ist
identisch: Getrieben von einer Spannung fliesst ein Strom in einem Leiter. Bei Anwesenheit eines Magnetfeldes entsteht dabei eine Kraft. Die gerichtete Summe aller Teilkräfte
in der Maschine ergibt die gesamte Kraft, beziehungsweise, zusammen mit einem Hebelarm, das Drehmoment. Wirken diese auf eine bewegliche Masse, so entsteht Bewegung,
Weg oder Drehwinkel und damit schliesslich Leistung und Arbeit. Alle Eigenschaften
des Maschinenaufbaus seien in der Konstanten kMasch enthalten. Entsprechend wird diese bei den verschiedenen Maschinen im Einzelnen komplex. Dies wird sich nachfolgend
bei der Modellierung der verschiedenen Maschinen zeigen.
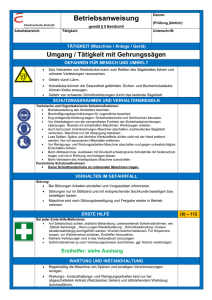
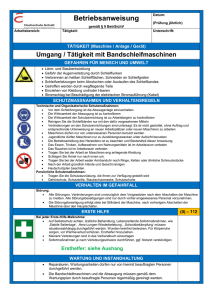
Die Kette für Translations- und Rotationsbewegung (ohne Lastmoment) zeigt Bild 2.1.
Dazu gelten für lineare Bewegungen die Grundgleichungen (2.1) und bei Rotation (2.2).
Strom
i
B
Magnetfeld
Bild 2.1.
Kraft
X
kMasch
Maschinenaufbau
Masse
Geschwindigkeit
Weg
F
1/m
v
s
M
1/J
Drehmoment
MassenTrägheitsmoment
1/s
1/s
Winkelgeschwindigkeit
Drehwinkel
Wirkungskette bei elektrischen Maschinen:
oben für lineare Bewegung, unten bei Rotation (1/s: Integration im Frequenzbereich)
F = i B k Masch = ma
1
v = ---- F dt; s = v dt
m
P = Fv; W = F ds = Fv dt
(2.1)
M = i B k Masch = Jd dt
= --1- M dt; = dt
J
P = M; W = M d = M dt
(2.2)
19
2 Elektromechanische Grundlagen
Die einzelnen Grössen in den Gleichungen sind analog zur Figur:
i B : Vektorprodukt von Strom und magnetischer Flussdichte
F, M: Kraft, Drehmoment
m, J: Masse, Massenträgheitsmoment
v, : Geschwindigkeit, Winkelgeschw.
s, : Weg, Drehwinkel
P, W: Leistung, Arbeit
Motor-/ Generatorbetrieb, Betriebsquadranten: Beim Einsatz von geregelten Antrieben ist das Ziel in den meisten Fällen die Abgabe von mechanischer Leistung an eine
Last. Grundsätzlich kann bei gleicher Struktur die Energieflussrichtung auch umgekehrt
werden: Die Last wird zur Energiequelle und die Maschine mit der zugehörigen Leistungselektronik zur Senke, wie in Bild 2.2 dargestellt. Im ersten Fall wirkt die Maschine
als Motor, im zweiten als Generator.
Netz /
Energiespeicher
Bild 2.2.
Stromrichter
PNetz
Maschine
Getriebe
Last /
Quelle
M, P
Motorbetrieb: Pme
(mech.) Generatorbetrieb: P
me
PStr
Grundstruktur von Antrieben für motorischen und generatorischen Betrieb
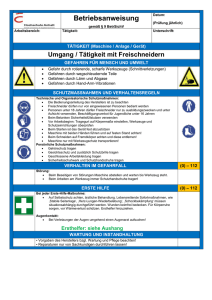
Die zugehörigen möglichen Betriebsquadranten, die Bereiche Q1...Q4, in der Drehmoment-Drehzahlebene sind in Bild 2.3 dargestellt. Die Ebene setzt sich zusammen aus einem Nennbereich, in dem bis zur Nenn-Drehzahl bei Nennstrom auch das Nenn-Moment
aufgebracht werden kann, und einem ‘Feldschwächbereich‘, einem Drehzahlbereich, in
welchem bei Nennstrom nur noch reduziertes Moment möglich ist. Auf die Bedeutung
des Begriffes Feldschwächung wird später eingegangen.
M
KurzzeitDrehmoment
Mn
-n
Generator
Q2
Q3
Motor
Motor
Q1
Q4
Generator
n
-Mn
Nennbereich
Feldstell-Bereich
Bild 2.3.
Betriebsquadranten Q1...Q4
für Nennbetrieb, Feldschwächung und Kurzzeit-Drehmoment Bereich
Für dynamische Vorgänge im Sekunden bis Minutenbereich sind oftmals grössere Drehmomente als Nennmoment zulässig.
2.1 Mechanische Drehzahl und Drehmoment
20
2.1 Mechanische Drehzahl und Drehmoment
Drehzahl-Angaben: Die mechanische Drehzahl von Antrieben wird in verschieden Einheiten angegeben. Bei vielen Anwendungen ist die Angabe von Umdrehungen pro Minute üblich. Teilweise wird mit Umdrehungen pro Sekunde gearbeitet. In diesem Text
wird nach Möglichkeit die Winkelgeschwindigkeit me in rad/s verwendet. Die Beziehungen zwischen den verschiedenen Angaben zeigt (2.3).
mech = 2 U s = 2 U min 60
(2.3)
Inneres Drehmoment, Beschleunigung: Vom inneren Drehmoment Mel, erzeugt durch
Strom und Magnetfeld in der Maschine, wird ein Teil für die Deckung von Reibungs- und
Lüfterverlusten der Maschine (MV) selber benötigt. Für Beschleunigungsvorgänge muss
zusätzlich das Lastmoment (ML) berücksichtigt werden. Es resultiert so (2.4).
d
------- = --1- M el – M V – M L
dt
J
(2.4)
Reib- und Lüftungsverluste in der Maschine: Die Lager-Reibung in der Maschine
kann sich in Form von Haft- und Gleitreibung äussern. Die Haftreibung kann dabei in Regelkreisen zu Schwierigkeiten führen, wenn sehr kleine Drehzahlen gefahren werden,
bzw. wenn positioniert werden soll. Durch den nicht kontinuierlichen Übergang von der
Haft zur Gleitreibung und umgekehrt besteht die Gefahr von Oszillationen, wenn die
Drehzahl zwischendurch Null wird.
Die Gleitreibung kann in guter Näherung als konstant angenommen werden, was ein
konstantes Bremsmoment ergibt. Daraus resultieren drehzahlproportionale Verluste.
Fast alle Maschinen haben innen und / oder aussen Lüfter zur Kühlung angebracht.
Diese produzieren ein Moment, dass etwa quadratisch zur Drehzahl ansteigt. Die Verluste selber steigen dabei mit der dritten Potenz! Bei höheren Drehzahlen dominieren sie
gegenüber den Reibungsverlusten. Die prinzipiellen Verläufe der Verlustmomente sind
in Bild 2.4 skizziert.
M
MV()
MR, gleiten
MR, haften
Bild 2.4.
Verlustmomente in einer Maschine
21
2 Elektromechanische Grundlagen
Lasten: Die Lastmomente in Funktion der Drehzahl, ML=f() haben verschiedene
Verläufe: Während Hebezeuge oft konstante Momente aufweisen, steigt das Moment bei
Lüftern und Pumpen quadratisch an. Bei Antrieben und Positioniereinrichtungen kann
das Moment bei konstanter Drehzahl in weiten Bereichen variieren.
Lastmomente sind oft zeitabhängig. Beispiele sind Wickler, bei denen sich bei konstantem Zug der Umfang ändert, Aufzüge mit unterschiedlicher Belastung oder Fahrzeuge
die einmal bergauf und das nächste Mal bergab fahren.
Übersetzungen, Getriebe: Wird zwischen Maschine und Last ein Getriebe geschaltet,
so tritt zwischen den Ein- und den Ausgangsgrössen eine Transformation auf, wie in Bild
2.5 dargestellt.
PV
M1, 1, P1
Bild 2.5.
Grundstruktur eines Getriebes
M2, 2, P2
Im verlustlosen Fall ist die Leistung an Ein- und Ausgang identisch und es gilt mit dem
Übersetzungsverhältnis nG (2.5).
2 = nG 1 ; M 2 = M 1 nG ; P2 = P1
(2.5)
Im realen Fall muss mit Verlusten PV gerechnet werden. Während das Drehzahlverhältnis
durch das Getriebe fest gegeben ist, wird das abgegebene Moment kleiner. Unter Verwendung des Getriebewirkungsgrades G gilt (2.6).
2 = nG 1 ; M 2 = G M 1 n ; P2 = G P1
G
(2.6)
Getriebe können in Regelkreisen aus zwei Gründen zu Oszillationen führen: Einmal wegen des schon beschriebenen Überganges von Haft- zu Gleitreibung. Zusätzlich haben
aber viele Getriebe Spiel. Dies macht vor allem Positionsregelungen schwierig. Hochwertige Getriebe werden deshalb bei Bedarf mit zusätzlichen Mitteln spielarm gebaut.
2.1 Mechanische Drehzahl und Drehmoment
22
3 Die fremderregte Gleichstrommaschine
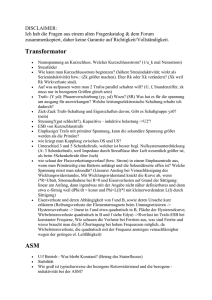
3.1 Aufbau und elektrisches Modell
Bei den meisten Antrieben sind zumindest die äusseren Regelkreise identisch. Die entsprechenden Strukturen werden schon sehr lange in Antrieben mit Gleichstrommaschinen (GM) eingesetzt. Für den Anwender sind dies die einfachsten Maschinen, sie lassen
sich auch mathematisch einfach beschreiben. Den mechanischen Aufbau, die elektrische
Ersatzschaltung und die durch die Erregung erzeugte magnetische Flussdichte im Luftspalt einer fremderregten GM zeigt Bild 3.1.
Stator (Ständer)
iE
ErregerWicklung
Polschuh
N
uE
uE
LE
(t)
iA
uA
iA
Bürsten
Rotor
(Anker)
Rotorwicklung
S
RA
LA
uA
Kommutator
(Stromwender)
B
i‘
e=f(me)
B
Bild 3.1.
RE
iE
Oben links: Aufbau einer fremderregten Gleichstrommaschine
Oben rechts: Elektrische Ersatzschaltung
Unten: Magnetische Flussdichte im Luftspalt, verursacht durch die Erregung
Die nachfolgenden Gleichungen der GM gelten bei Vernachlässigung von Eisen-, Bürsten- und Reibverlusten, d.h. wenn die innere elektrische Leistung Pel der mechanischen
Leistung Pme an der Welle entspricht. Auch die Ankerrückwirkung und weitere Phänomene untergeordneter Bedeutung werden vernachlässigt.
3.1 Aufbau und elektrisches Modell
24
Der Erregerkreis in (3.1) entspricht einer einfachen RL-Schaltung. Die Konstante CE
erfasst die Beziehung zwischen Erregerstrom iE und Flussverkettung im Rotorkreis der
Maschine. Die Flussverkettung wird auch als k oder kT bezeichnet.
d iE
u E = i E R E + -------L
dt E
= C E iE
(3.1)
Wird das Feld mit Permanentmagneten erzeugt, so fallen die beiden Gleichungen weg
und die Flussverkettung ist konstant.
Im Rotorkreis (3.2) tritt neben der Eingangsspannung uA die induzierte Spannung e auf.
Diese ist proportional zur Flussverkettung und damit zum Erregerstrom iE), sowie zur
mechanischen Drehzahl me.
e = me
di
u A = i A R A + --------A L A + e
dt
(3.2)
Das Produkt aus Flussverkettung und Rotorstrom iA ergibt das elektrische (innere)
Drehmoment Mel. Bei der angenommenen verlustlosen Maschine entspricht dies dem
mechanischen Moment Mel=Mme. Davon muss ein eventuelles Lastmoment ML abgezogen werden. Das Integral des resultierenden Momentes, geteilt durch das Massenträgheitsmoment Jtot von Maschine und Last, ergibt schliesslich die Drehzahl me.
M el = i A
1 - M – M dt
me = -------el
L
J tot
(3.3)
Für die abgegebene Leistung und Arbeit gilt (3.4).
P = M el me ;
W = M el d = M el me dt
(3.4)
Die fremderregt Gleichstrommaschine ist also mit drei Differentialgleichungen erster
Ordnung beschrieben. Bei Permanentmagnet-Erregung reduziert sich dies sogar auf zwei
lineare Differentialgleichungen.
25
3 Die fremderregte Gleichstrommaschine
3.2 Struktur eines geregelten GM-Antriebes
Bild 3.2 zeigt die Regelstruktur eines hochdynamischen drehzahlgeregelten GM-Antriebes. Die Funktion soll in kurzer Form vorgestellt werden.
iist
iSoll
Feld-Kennlinie
nSoll
nIst
Bild 3.2.
PI (D)
iSoll
Drehzahlregler iIst
PI (D)
Stromregler
PI (D)
Stromregler
mE ErregerStromrichter
mA
RotorStromrichter
Maschine
iE
uE
RE
LA
RA
uA
LE
iA
e
Mel
me
Drehzahl-Messung
Blockdiagramm eines fremderregten Gleichstrommaschinen-Antriebes
Rotorkreis: Der Rotor (Anker) der Maschine wird aus dem Rotor-Stromrichter gespeist,
der positive und negative Ströme und Spannungen erzeugen kann (4-Quadranten Stromrichter). Das Steuersignal für den Stromrichter ist die Modulationsfunktion mA. Mit einem Stromregelkreis wird der Stromrichter so geregelt, dass er als Stromquelle wirkt. Da
das Drehmoment proportional zum Rotorstrom ist, entspricht dies direkt einem Drehmoment-Regler. Überlagert wird dem inneren Stromregelkreis ein äusserer Drehzahlregelkreis. Darüber könnte jetzt z.B. noch ein Positionsregelkreis folgen.
Erregerkreis: Hier sind Stromrichter und Stromregler meist so ausgelegt, dass der Strom
nur eine Polarität annehmen kann. Der Sollwert für den Erregerstrom iE und damit indirekt für die Flussverkettung wird drehzahlabhängig vorgegeben: Bis zur Nenndrehzahl
wird er auf seinem Nennwert gehalten und darüber reduziert; der Antrieb befindet sich
im Feldschwächbereich. Die Feld-Kennlinie ist so ausgelegt, dass im Feldschwächbereich die Rotorspannung drehzahlunabhängig konstant bleibt. Dabei ist der Rotor-Stromrichter fast voll ausgesteuert.
Wird das Feld statt mit Elektro- mit Permanentmagneten erzeugt, so ist die Flussverkettung konstant, der Erregerkreis fehlt und eine Feldschwächung ist nicht möglich.
3.2.1 Verfahren zur Reglerauslegung
Basierend auf dem Gleichungssatz der Gleichstrommaschine können jetzt die Regler für
den Erregerkreis, den Rotorstrom und die Drehzahl ausgelegt werden. Dazu ist es üblich
die Gleichungen mittels Laplace-Transformation in den Frequenzbereich zu transformie-
3.2 Struktur eines geregelten GM-Antriebes
26
ren. Die Regler können so auf einfache Art im Bodediagramm ausgelegt werden. Selbstverständlich sind auch andere Arten der Auslegung möglich, z.B. das Verfahren der Polvorgaben (pole-placement) oder Zustandsregler. Da die Zeitkonstanten von Rotor- und
Erregerkreis stark verschieden sind, kann die Auslegung der beiden Regler im Allgemeinen unabhängig voneinander vorgenommen werden.
Als Regler werden wenn immer möglich einfache PI-Regler (Proportional-IntegralRegler) verwendet. Nur bei sehr grossen dynamischen Anforderungen werden Regler mit
D-Anteil (Differential-Anteil) verwendet. Auch die vorgestellte Kaskaden-Struktur aus
innern (unterlagerten) und äusseren (überlagerten) Reglern ist sehr typisch.
3.2.2 Stationäre Arbeitsbereiche der GM
Mit den hergeleiteten Gleichungen lässt sich neben dem dynamischen auch das stationäre
Verhalten der GM in Funktion der Drehzahl me darstellen. Die qualitativen stationären
Kennlinien zeigt Bild 3.3. Zu diesen gelten die folgenden Bemerkungen:
- Mit dem Index n sind die Nenndaten der Maschine gekennzeichnet.
- Oberhalb der Nenndrehzahl me,n wir die Maschine mit Feldschwächung so betrieben,
dass die induzierte Spannung e (näherungsweise) konstant bleibt.
- Der auf die Maschine angepasste Stromrichter im Rotorkreis sei so ausgelegt, dass die
Maximalspannung UStr,n grösser ist als die Maschinen-Nennspannung. Damit kann die
Maschine auch bei leichter Netz-Unterspannung immer noch mit voller Leistung betrieben werden. Zusätzlich steht auch bei Nennspannung der Maschine noch eine Spannungsreserve für dynamische Vorgänge zur Verfügung.
,e,Mel
IA,n
UStr,n
UA,n
Mel,n
n
iA
e
Mel=Mel,n
Mel=Mel,n(me,nme
n
n(me,nme
Induziert
Spannung e
me
me,n
Spannungsstellbereich,
Nennbereich
Bild 3.3.
Feldstellbereich,
Feldschwächbereich
Stationäre Kennlinien der Gleichstrommaschine bei Nennstrom
27
4 Beschreibungen von Drehfeldmaschinen
4 Beschreibungen von Drehfeldmaschinen
Drehfeldmaschinen (DFM), auch als Drehstrommaschinen oder Drehstrommotoren bezeichnet, decken einen sehr grossen Leistungsbereich ab. Sie sind mit Abstand die wichtigsten elektrischen Maschinen: Oberhalb von einigen hundert Watt sind über 90% aller
Maschinen DFM. Ein stetig wachsender Teil davon wird mit Stromrichtern (SR) gespeist.
Für Kombinationen von Stromrichtern werden auch die Bezeichnungen Frequenzumrichter und Frequenzumformer verwendet; abgekürzt mit FU. Die begrenzenden Grössen für die Leistung von Drehstrommaschinen sind die magnetische Sättigung des Eisens, die thermische Belastung der Wicklungen und die Wärmeabfuhr. Die mechanischen
Grenzen bestimmen vor allem die maximal zulässige Drehzahl der Maschine.
Die wichtigsten Drehfeldmaschinen, die Asynchron- (ASM) und Synchronmaschinen
(SM), lassen sich bezüglich Leistung und Anwendungen gemäss Tabelle 4.1 einteilen.
Tabelle 4.1.
Einsatzgebiete und -bereiche von stromrichtergespeisten Drehfeldmaschinen
KäfigläuferASM
Leistungsbereich
(typisch)
Einsatz
(typisch)
Marktanteil
100W
bis > 1 MW
praktisch alle
möglichen
Anwendungen
ca. 90%
Permanentmagnet erregte SM, Spezielle Bauformen
von ASM und SM
fremderregte SM,
Synchron-Reluktanzmotoren
(z.B. Generatoren)
mW
bis > 100 MW
bis > 10 MW
Antriebe mit hohem Wirkungsgrad, EC-Motoren
Verschiedenste
Spezialanwendungen
ca. 8% (zunehmend!)
ca. 1%
Die bekannteste aller Bauformen ist die Käfigläufer-ASM, eine ASM bei der die Rotorwicklungen kurzgeschlossen sind. Sie wird mit grossem Abstand am meisten eingesetzt.
Entsprechend ihrer Bedeutung wird sie nachfolgend auch ausführlich diskutiert.
Die im Rotorkreis mit Permanentmagneten ausgerüsteten Synchronmaschinen mit
Stromrichterspeisung gewinnen laufend an Marktanteil. Sie werden standardmässig für
Leistungen von wenigen mW bis einige 10 kW gebaut. Leistungen im Bereich von mehreren MW werden vereinzelt bei Windturbinen eingesetzt. Leicht abgewandelte Maschinen werden auch für EC-Motoren (elektronisch kommutierte Motoren, bürstenlose
Gleichstrommotoren) verwendet. Sie unterscheiden sich durch den Verlauf des magnetischen Feldes im Luftspalt und die Art der Steuerung von den normalen, stromrichtergespeisten SM. Neuer ist der Synchron-Reluktanzmotor, der vor allem im Zusammenhang
mit Stromrichtern sehr interessant ist. Er entspricht einer Synchronmaschine mit ausgeprägten Polen ohne Erregung.
4.1 Grundprinzip der DFM
28
Oberhalb von einigen 10 kW werden SM meistens mit Schleifringen im Erregerkreis
ausgeführt. Über diese wird der Gleichstrom zur Erzeugung des Rotormagnetfeldes auf
den Rotor übertragen. Es kommen dabei auch transformatorische Erregersysteme zum
Einsatz, bei denen die Energie transformatorisch auf den Rotor übertragen wird. Mit
Gleichrichtern wird dann auf dem Rotor der benötigt Gleichstrom erzeugt.
Mit selbstgeführten Stromrichtern mit Spannungszwischenkreis werden typischerweise Synchronmaschinen bis einige MW gespeist. Darüber werden vereinzelt noch Stromrichter-Synchronmotoren mit Thyristor-Stromrichtern und Stromzwischenkreis eingesetzt (Stichwort LCI: load comutated inverter).
Maschinen-Aufbau, spezielle Bauformen: Auf den detaillierten elektrischen und mechanischen Aufbau der Maschinen wird nicht eingegangen. Was interessiert sind Modelle und Darstellungen der Synchron- und Asynchronmaschine, welche die Maschinen so
beschreiben, wie sie sich an den elektrischen Klemmen und der Welle verhalten. Für den
detaillierten Aufbau wird auf die weiterführende Literatur verwiesen, z.B. [Fis1]. Weitere ‘DFM-ähnliche’ Bauformen wie geschaltete Reluktanz- und Schrittmotoren werden
im vorliegenden Text nicht behandelt.
4.1 Grundprinzip der DFM
Die Funktion von DFM basiert, wie der Name sagt, auf drehenden Magnetfeldern. Diese
können auf verschiedene Arten erzeugt werden. Beim Aufbau der Maschinen sind den
Varianten keine Grenzen gesetzt. Entsprechend der praktischen Bedeutung werden aber
nur Dreiphasen-Maschinen (drei Wicklungsstränge im Stator) betrachtet. Den prinzipiellen Aufbau eines Stators mit einem magnetischen Polpaar zeigt Bild 4.1. Die Summe der
von den drei gezeichneten Stator-Wicklungen erzeugten Feldern überlagert sich im Luftspalt zu einem resultierenden Stator-Feld mit einem Nord- und einem Südpol. Amplitude
und Drehrichtung des Feldes sind durch die drei Ströme iS,U, iS,V und iS,W bestimmt. Diesem Feld wird zusätzlich das Feld herrührend vom Rotor überlagert.
Bei ASM wird das Rotor-Magnetfeld durch eine Drehstromwicklung auf dem Rotor
gebildet. Bei Käfigläufern ist die Wicklung dabei zu Leiterstäben degeneriert, die an den
Stirnseiten des Rotors mit massiven Ringen kurzgeschlossen sind. Ein schönes Bild liefert dafür die englische Bezeichnung ‘squirrel cage’ nach dem Laufrad für Eichhörnchen.
Die Ströme im Rotor werden durch die vom Statorfeld induzierten Spannungen erzeugt.
Deshalb werden ASM auch als Induktionsmaschinen bezeichnet.
Bei SM wird das Rotorfeld direkt mittels Elektro- oder Permanentmagneten erzeugt.
Die Rotoren von Reluktanzmaschinen erzeugen dagegen kein eigenes Magnetfeld.
Hier fliesst nur der vom Stator erzeugte Fluss durch den Rotor.
29
4 Beschreibungen von Drehfeldmaschinen
4.1.1 Von den Statorströmen zur magnetischen Flussdichte
Ausgegangen wird von der vereinfachten Maschinendarstellung in Bild 4.1 links, in welcher der Rotor als Eisenzylinder mit sehr grosser Permeabilität angesetzt wird. Der Stator
der Maschine besteht ebenfalls aus Eisen. Darin sind drei identische, um jeweils 2/3
(120°) räumlich versetzte Wicklungen eingelegt. Die drei Systeme werden mit den Indizes U, V und W bezeichnet. Mit Kreuzen (Eintritt) und Punkten (Austritt) werden die Bezugsrichtungen der Ströme markiert. Für die Phase U ist auch die Richtung des Feldes
bei positivem Strom gezeichnet. Einfacher kann die Wicklungsanordnung durch konzentrierte Spulen symbolisiert werden. Deren Achse zeigt in Richtung des von der jeweiligen
Wicklung erzeugten Magnetfeldes, wie im Bild rechts gezeichnet.
BV
S,a
iS,V
iS,W
Stator
N
Rotor
r
iS,U
S,b
Bild 4.1.
iS,V
Rotor
Stator S
uS,V
uS,W
iS,W
iS,U
BU
uS,U
BW
Prinzipieller Aufbau dreiphasiger Drehfeldmaschinen (DFM):
links: mit den in Nuten eingelegten Wicklungen und Bezugsrichtungen der Ströme,
rechts: mit schematisierten Wicklungen und Bezugsrichtungen des Feldes
Zur Vereinfachung und zur besseren Übersicht wird die Maschine oft als Abwicklung gezeichnet: Die horizontale Achse ist der Winkel , die vertikale Achse liege parallel zum
Radius r. Der Luftspalt sei (etwa) der Nullpunkt der vertikalen Achse. Bild 4.2 zeigt in
dieser Darstellung die Wicklung U und die resultierende Flussdichte B,U. Dargestellt
sind zwei Fälle: Im Ersten fliessen die Ströme in den in die Nuten eingelegten Leitern,
im Zweiten sind es Strombeläge i'U über zwei 60 Grad Sektoren pro Wicklung, d.h. kontinuierliche Stromverteilungen, entsprechend Strömen in sehr vielen Nuten. Für weitere
Wicklungsaufbauten sei auf die Literatur verwiesen (z.B. Mehrschichtwicklungen).
Für den Beitrag zur Feldstärke H bzw. der Flussdichte Bim Luftspalt gilt gemäss dem
Durchflutungsgesetz bei diskreten Leitern (4.1), wenn die Feldstärke im Eisen gegenüber
dem Luftspalt vernachlässigt wird. Mit S wird dabei das Wegstück bezeichnet, über dem
der Strombelag i' integriert wird. (Es ist zu beachten, dass nach der Rechtsschraubenregel
für die Beziehung zwischen Strom und Feld der Integrationsweg im Uhrzeigersinn gewählt werden muss.) Für die gesamte Feldstärke müssen die Ströme aller Leiter berücksichtigt werden, also Vor- und Rückleiter!
4.1 Grundprinzip der DFM
r
30
B,U
i’, B
i'U
‘Stator’
‘Luftspalt ’
Bild 4.2.
‘Rotor’
iU
iU
‘B,U_kontinuierlich’
Strom- und Feldverlauf des Stranges U über dem Umfang der DFM:
ausgezogen: Wicklung in diskreten Nuten,
gestrichelt: kontinuierliche Strombeläge über zweimal 60 Grad
2 ni = Hdx = 2H
0 n
B = 0 H = --------i
(4.1)
Entsprechend gilt bei der Rechnung mit Strombelägen (4.2).
i'd S = Hdx = 2H
S
B = -----0- i'd S
(4.2)
S
Denkt man sich den Strom in einem dünnen Draht konzentriert, so sind Feldstärke und
Flussdichteverlauf bei diskreten Strömen eine Treppenkurve. Dies ist der ‘eckigste’
Grenzfall. Bei kontinuierlichen Strombelägen über 60 Grad Segmente geht die
Flussdichte in Trapez-Verläufe über. Bei realen Leiterabmessungen liegt der effektive
Verlauf zwischen den beiden gezeichneten Kurven.
Bei Drehfeldmaschinen ist der ideale Flussdichteverlauf B im Luftspalt eine harmonische Funktion (sinus- bzw. cosinus-förmig). Dazu müsste der entsprechende ‘Strombelag’ auf dem Stator ebenfalls einen harmonischen Verlauf in Funktion von aufweisen.
Praktisch ist diese Forderung aufgrund der diskret in Nuten verteilten Ströme und der magnetischen Sättigung im Bereich der maximalen Feldstärke nur näherungsweise erfüllt.
Die Abweichungen müssen vor allem beim Bau der Maschine berücksichtigt werden. Für
die Anwender sind sie höchstens in Spezialfällen weiter störend. Deshalb, und weil die
resultierenden Beschreibungen die einfachste Form erhalten, werden bei der Raumzeigerdarstellung harmonische Strombeläge, entsprechend der ‘räumlichen Grundschwingung des Strombelages’ vorausgesetzt.
Die entsprechenden idealen Strombeläge (bei gleichem positiven Strom) über dem abgewickelten Umfang zeigt Bild 4.3. Die drei Wicklungen sind durch eine einzige Windung (beim Strombelags- Maximum) in der Mitte der jeweiligen Nuten-Gruppe symbolisiert. Für die Phase U ist wiederum der resultierende Beitrag zur Flussdichte im Luftspalt BU gezeichnet. Die einzelnen Flussdichte-Beiträge der drei Phasen sind örtlich
fest. Sie sind gegenüber dem verursachenden Strombelag räumlich um eine Viertelperiode (/2) versetzt. Ihre Momentanwerte variieren proportional zu den Strömen in den
entsprechenden Wicklungen.
31
4 Beschreibungen von Drehfeldmaschinen
r
i´, B
iU´
iW´
iW
iV
iU
iV´
iW
iV
iW´
iU
iW
B,U
Bild 4.3.
Strom- und Flussdichteverlauf über dem Umfang der DFM; ausgezogen Phase U
Die Flussdichten der drei Wicklungen in (4.3), (4.4) und (4.5) überlagern sich zur gesamten Flussdichte in Funktion der Zeit (die drei Ströme sind zeitabhängig, i(t)) und des
Ortes () in (4.6):
B U t = k m i U cos
(4.3)
B V t = k m i V cos – 2 3
(4.4)
B W t = k m i W cos – 4 3 = k m i W t cos + 2 3
(4.5)
B res t = B U t + B V t + B W t
= k m 2 cos 2i U – i V – i W + sin 3 i V – i W
(4.6)
= B̂ cos + B̂ sin
B̂ = k m 2 2i U – i V – i W ;
B̂ = k m 3 2 i V – i W
(4.7)
km = Magnetkreiskonstante, erfasst die Beziehung zwischen Strom und Induktion B
Die Betrachtungen und Umformungen zeigen:
- (4.6) beschreibt die magnetische Flussdichte im Luftspalt der Maschine als Funktion
des Ortes und der Zeit vollständig. Statt mit drei um 2/3 versetzten harmonischen
Funktionen im Raum wird aber jetzt die Flussdichte mit zwei orthogonale harmonischen Funktionen (sin und cos) B und B beschrieben wie in Bild 4.4 dargestellt. Die -Achse ist dabei gleich der Achse für B,u und die -Achse steht senkrecht,
wie in Bild 4.5 dargestellt. Diese Darstellung wird als Zweiachsen-Darstellung bezeichnet.
- Die Summen der Flussdichten aller drei Wicklungen, beziehungsweise der zwei orthogonalen Komponenten B und Bin (4.6), ergeben immer einen harmonischen Verlauf über dem Umfang, unabhängig davon welche momentanen Ströme in den drei
Wicklungen fliessen.
4.1 Grundprinzip der DFM
B
iW
B,
B,
iV
iU
iW
Bild 4.4.
32
iV
iU
iW
Orthogonale Komponenten B, Bder magnetischen Flussdichte Bim Luftspalt
gezeichnet mit den positiven Scheitelwerten.
- Die Momentanwerte von B und B sind immer Funktionen der drei Momentanwerte iU, iV, und iW.
- Die resultierende Amplitude von BRes und der Winkel bei dem der Scheitelwert von
Bres auftritt, sind immer eine Funktion der drei Momentanwerte iU, iV und iW.
Der Strombelag und die magnetische Flussdichte können zur Illustration als ‘Schnitze’
über dem Luftspalt dargestellt werden. Ihre Lage ist örtlich fest, der Verlauf in Funktion
des Winkels (bei idealen Wicklungen) immer eine harmonische Funktion. Die Amplitude
und das Vorzeichen beider Grössen ändern mit der Frequenz des Statorstromes.
B
++
Stator
Rotor
iS,
Bild 4.5.
- -
Rotor
B
B
++
uS,
iS,
uS,
- -
Modell einer DFM mit zwei orthogonalen Wicklungen:
links: schematisierten Wicklungen und Bezugsrichtungen,
rechts: örtlich feste, harmonische Verläufe der Luftspaltinduktion-Komponenten
B und Bmit dem zugehörigen Raumzeiger B der Luftspaltinduktion
33
4 Beschreibungen von Drehfeldmaschinen
4.1.2 Polpaarzahl
Die Polpaarzahl einer Maschine gibt an, wieviele magnetische Polpaare (Nord- und Südpole) sich im Luftspalt bei korrekter Anspeisung ergeben. Der in Bild 4.1 dargestellte
Statoraufbau ergibt im Luftspalt immer nur einen magnetischen Nord- und einen Südpol.
Während einer Periode (t= 2) der elektrischen Grössen drehen diese in positiver oder
negativer Richtung um den mechanischen Winkel 2, d.h. eine ganze Umdrehung.
Die Statorwicklungen können aber auch so aufgeteilt werden, dass sich mehr als ein
Polpaar über dem Umfang ergeben. Als Beispiel ist in Bild 4.6 links die Wicklung U eines vierpoligen (zwei Polpaare) Stators dargestellt. Aus dem Bild ist ersichtlich, dass die
Aufteilung auf zwei Teilwicklungen vier magnetische Pole über dem Umfang ergibt.
Zwei Polpaare ergeben sich selbstverständlich auch dann, wenn alle drei Wicklungssätze
betrachtet werden. In der gleichen Art kann die Aufteilung weiter erhöht werden. Bei der
Aufteilung auf drei Teilwicklungen resultiert beispielsweise ein Stator mit drei Polpaaren
beziehungsweise sechs Polen.
BV,1
BW,1
iS,W
iS,U
iS,V
uS,U
S
N
iS,U
N
BU,2
Rotor
N
iS,U
S
S
iS,U
S
N
uS,U
iS,V
iS,W
BV,2
Bild 4.6.
BU,1
BW,2
Aufbau einer dreiphasigen Drehfeldmaschinen mit zwei Polpaaren
und dem Strom iS,U in der Phase U.
links: mit den in Nuten eingelegten Statorwicklungen der Phase U,
rechts: mit schematisierten Stator-Wicklungen und Bezugsrichtungen
Die Polpaarzahl p tritt als ‘Transformationsfaktor’ zwischen ‘elektrischer’ (el) und
mechanischer (me) Winkelgeschwindigkeit auf: Für eine mechanische Umdrehung des
Rotors (Drehwinkel 2werden jetzt p Perioden (elektrischer Winkel von p2 notwendig. Dafür sind jetzt aber p-mal so viele Polpaare an der Drehmomentbildung beteiligt;
das Moment wird p-mal grösser.
Mit (4.8) können die elektrische Drehzahl el und das zugehörige Drehmoment pro
Polpaar Mel sehr einfach in die Wellengrössen umgerechnet werden. Die Leistungsbilanz
in (4.9) bei verlustloser Maschine gilt weiterhin.
me = el p ;
M me = pM el
(4.8)
4.1 Grundprinzip der DFM
P el = M el el = P me = M me me
34
(4.9)
Rotorbauformen bei mehrpoligen Maschinen: Wird der Stator mehrpolig aufgebaut,
so muss dem auch auf der Rotorseite Rechnung getragen werden. Grundsätzlich müssen
Rotor und Stator gleichviele Pole aufweisen. Bei der Käfigläufer ASM wird das einfach:
Der kurzgeschlossene Käfig sieht für jede Polpaarzahl gleich aus. ASM mit bewickelten
Rotoren und SM müssen aber mit der entsprechenden Polzahl im Rotor gebaut werden.
4.1.3 Maschinendarstellung mit bezogenen Grössen
Häufig werden Maschinen unter Verwendung von bezogenen Grössen (per unit Grössen,
d.h. pu) dargestellt. Das erleichtert insbesondere den Vergleich mit anderen Maschinen:
Reaktanzen lassen sich besser bewerten und Simulationsresultate von verschiedenen Maschinen können zueinander in Bezug gesetzt werden. Auch werden Gleichungen zum
Teil einfacher.
Bezugssystem, Bezugsgrössen: In der Praxis werden verschiedene Bezugsgrössen verwendet, die sich mit der zugrunde gelegten Schaltungsart begründen lassen. Für die Bezugsspannungen werden teilweise die Leiter-Leiter-Spannung U n , die Leiter-Neutralpunkt-Spannung U n ph und von beiden bei bestimmten Anwendungen auch die Scheitelwerte verwendet.
In diesem Text wird als Ausgangsgrösse die ‘Strangspannung bei Sternschaltung’ U n ph
in (4.10) verwendet. Entsprechend ist dann der Strom gleich dem Strangstrom.
Beim Vergleich von Maschinen ist wichtig zu wissen, welche Bezugsgrössen verwendet
wurden.
Anwendung: Die physikalische Grösse X wird durch Division mit XB auf die bezogene
Grösse x umgerechnet: x = X/XB. Bezogene Grössen sind streng genommen einheitslos
und werden klein geschrieben. Beim Bezugsmoment MB ist zu beachten, dass es aus der
Eingangsscheinleistung bestimmt wird. Es ist damit grösser als das Nennmoment der
Maschine, da Verluste und cos der Maschine nicht berücksichtigt werden.
U B = U nPh
IB = In
B = 2 f n
B = U B B
ZB = U B IB
S B = 3U nPh I n
LB = X B B
B me = B p
M B = S B B me
(4.10)
35
4 Beschreibungen von Drehfeldmaschinen
4.1.4 Wirkungsgrad von Drehfeldmaschinen
Der Wirkungsgrad von Drehfeldmaschinen ist von einer Reihe von Einflüssen abhängig.
Bei linear steigenden Maschinenabmessungen nehmen die magnetischen Wege linear
und die aktive Kupferfläche in den Nuten quadratisch zu. Bei gleicher Stromdichte kann
der Strom damit überproportional wachsen. Bei etwa konstanten absoluten Fertigungstoleranzen wird bei grossen Maschinen der Luftspalt nicht proportional grösser. Dadurch
haben grössere ASM im Verhältnis kleinere Magnetisierungsströme. In optimal betriebenen SM fliesst im Stator kein Magnetisierungsstrom. Ohne weiter auf die einzelnen Einflüsse einzugehen gilt, dass bei optimal ausgelegten Maschinen der Wirkungsgrad mit
steigender Leistung steigt. Der maximale Wirkungsgrad wird oft unterhalb der Maschinen- Nennleistung erreicht - typischerweise im Bereich von 75% der Nennleistung.
Maschinen werden nicht auf den Wirkungsgrad allein, sondern auf Kosten und Wirkungsgrad optimiert. Bei unbekannter Gewichtung der beiden Kriterien lassen sich nur
begrenzt allgemeingültige Aussagen machen. Tendenziell gilt aber bei Maschinen gleicher Leistung, dass im Nennbereich (Spannungsstellbereich) der Wirkungsgrad bei
ASM am tiefsten, bei fremderregten SM mittel und bei mit Permanentmagneten erregten
SM am höchsten ist. (Bei kleinen Leistungen ist der Unterschied zwischen guten ASM
und fremderregten SM klein: Eine 100 kW SM braucht 2...4 kW Erregerleistung. Eine
200 MW SM benötigt dagegen nur noch etwa 0.15% Erregerleistung). Den Wirkungsgrad in Funktion der Leistung von typischen ASM zeigt Bild 4.7. Mit Permanentmagneten erregte SM können leicht besser sein als ASM der Klasse IE3.
Ab 2017 müssen Asynchronmaschinen im Leistungsbereich von 0.75 bis 375 kW entweder der Effizienzklasse IE3 entsprechen oder aber IE2, zusammen mit einer elektronischen Drehzahlregelung. Vorwärtsgerichtet wird die Effizienzklasse IE4 (und noch später IE5) als Vorschrift angestrebt.
Im Feldstellbereich (Feldschwächung) wird der Wirkungsgrad von Permanentmagnet
erregten SM schnell schlechter, da grosse Ströme für die Feldschwächung nötig werden.
(Diese Ströme begrenzen denn auch die maximal mögliche Drehzahl.) Bei den ASM dagegen nimmt der Magnetisierungsstrom im Feldschwächbetrieb ab.
Bei grossen Maschinen wird infolge der längeren Wege die Wärmeabfuhr schwieriger,
insbesondere aus dem Rotor. Maschinen, bei denen die Wärme vor allem im Stator auftritt, lassen sich thermisch besser beherrschen. Entsprechend sind bei ASM die thermischen Verhältnisse am anspruchsvollsten, da prinzipbedingt im Rotor Verluste auftreten.
Ohne spezielle Kühlverfahren begrenzt dies die maximale Baugrösse.
0.8
0.6
0.1
1kW
10
100
1MW Pn
Bild 4.7.
Typischer Wirkungsgradverlauf von ASM mit
‘Premium Efficiency IE3’ (grün, ausgezogen);
‘High Efficiency IE2’ (braun, gestrichelt) und
‘Standard Efficiency IE1’ (rot, punktiert)
4.2 Asynchronmaschinen im stationären Betrieb
36
4.2 Asynchronmaschinen im stationären Betrieb
Für die Auslegung einfacher Regelkonzepte genügt die Beschreibung der ASM im stationären Betrieb. Auch für die Bestimmung der Elemente der verschiedenen elektrischen
Ersatzschaltungen wird meistens von diesen Darstellungen ausgegangen. Für die dabei
resultierende elektrische Strang-Ersatzschaltung werden implizite die folgenden wichtigen Annahmen gemacht:
- Die Maschinen sind elektrisch und mechanisch symmetrisch aufgebaut (z.B sind Widerstände und Induktivitäten in allen Strängen gleich).
- Alle drei Maschinenstränge werden symmetrisch gespeist, d.h. alle entsprechenden
Grössen in den drei Phasen sind identisch, aber elektrisch um 120 Grad versetzt.
- In den Speisegrössen treten keine Gleichtaktkomponenten (common mode) auf. Die
Summen der drei Spannungen beziehungsweise Ströme sind in jedem Zeitpunkt null.
- Es wird mit den Effektivwerten von Strömen und Spannungen gerechnet.
- Die Maschinen befinden sich im stationären Betrieb.
Die verschiedenen Leistungen der gesamten dreiphasigen Maschine sind gleich den entsprechenden dreifachen ‘Strangleistungen’.
Die Ersatzschaltungen sehen für Dreieck und Sternschaltung der Maschine gleich aus,
die Elemente müssen aber entsprechend der Schaltung bestimmt werden. Ausführlichere
Informationen zu bekannten stationären Ersatzschaltungen sind z.B. bei [Fis1] zu finden.
4.2.1 Funktionsprinzip der Asynchronmaschine
Betrachte wird eine Maschine mit einem Polpaar. Die drei auf mehrere Nuten verteilten
Statorwicklungen erzeugen eine näherungsweise sinusförmige Luftspalt-Flussdichte
B(,t). Die Amplitude von B̂ ist abhängig von den Amplituden der speisenden Grössen.
Die Zählrichtung für B(,t) ist in Bild 4.8 radial von innen nach aussen gewählt, d.h.
vom Rotor zum Stator. Diese Flussdichte drehe mit der Winkelgeschwindigkeit S im
Gegenuhrzeigersinn. Zur Zeit t= 0 liege B(,t) im Luftspalt und damit an der Rotoroberfläche so, wie im linken Bild mit den grünen ‘Schnitzen’ symbolisiert und im rechten
Bild als Abwicklung dargestellt. Das Maximum der Flussdichte ist um den Winkel B,0
gegenüber der horizontalen Bezugsachse verdreht und es gilt (4.11).
t
B t = B̂ t cos – B = B̂ t cos – S d + B 0
0
(4.11)
Im Rotor mit dem Radius rR und der magnetisch wirksamen Länge lR sei vorerst nur eine
kurzgeschlossene Wicklung mit n Windungen und dem Gesamtwiderstand RR einge-
37
4 Beschreibungen von Drehfeldmaschinen
bracht. Die Induktivität LR der Rotorwicklung sei an dieser Stelle vernachlässigt. Hinund Rückleiter, L1 und L2, sind gegenseitig um den Winkel versetzt (gegenüberliegend,
Durchmesserwicklung).
S
+
+
me
me
rR
L1
B
iR,i
uR,i
00
B
-
B
S
B
Stator
B,0
me
lR
L2
me
Bild 4.8.
Stator und Rotor einer ASM mit schematisierter Flussdichte B im Luftspalt bei t= 0
links: räumlich, rechts: abgewickelt, aber von hinten gesehen.
Die Rotorwicklung ist zur Zeit t= 0 gegenüber dem Maximum der Flussdichte um den
Winkel 0 verdreht und dreht mit der Geschwindigkeit me in der gleichen Richtung
wie die Flussdichte B. Damit gilt für den Winkel zwischen magnetischer Flussdichte
und betrachteter Rotorwicklung (4.12).
t
t
0
0
t = me t – B t = me 0 – B 0 + me – S d = 0 – d
R
(4.12)
R = S – me bezeichnet dabei die Frequenz, welche durch die Drehzahldifferenz zwischen Feld und Rotor in der Rotorwicklung auftritt. Schliesslich resultiert für die
Flussdichte BLB an der Position der Leiterbündel L1 und L2 (4.13).
B L1 t = – B L2 t = B̂ cos t
(4.13)
Mit den gemachten Ansätzen lässt sich nun die Flussverkettung (t) in der Rotorwicklung durch Integration der Flussdichte über den halben Umfang bestimmen (Rotordurchmesser rR, -länge lR, Windungszahl n) (4.14). Aus dem Fluss (t) kann anschliessend
mittels Ableitung (4.15) die induziert Spannung ui(t) ermittelt werden ( dA = l R r R d ).
4.2 Asynchronmaschinen im stationären Betrieb
38
t = n B t d A = n r R l R B t d
B + +
A
= nr R l R B̂ t
(4.14)
cos d = – 2nr R l R B̂ t sin
B +
d- B̂ t sin t
u R i = – d
-------- = 2nr R l R ---dt
dt
B̂ t
= 2nr R l R d------------- sin t + B̂ cos t R
dt
(4.15)
Der Strom in der Rotorwicklung (bei Vernachlässigung der Induktivität) ist proportional
zur induzierten Spannung ui geteilt durch den Rotorwiderstand RR: i R i = u R i R R .
Damit kann jetzt die Kraft auf ein Leiterbündel aus magnetischer Flussdichte B, Rotorstrom iR und Leiterlänge lR im Magnetfeld gebildet werden. Da Magnetfeld und Strom
schon durch den Aufbau senkrecht zueinander stehen, wird die Berechnung der resultierenden Kraft F = i B l R zum einfachen Skalarprodukt (4.16).
nr R l
B̂ t - sin + B̂ cos 2 (4.16)
F LB = i R i B LB l R = 2 -------------R- B̂ t cos d------------
R
RR
dt
(4.16) beschreibt die Teilkraft auf das Leiterbündel, das um den Winkel gegenüber dem
Feld verdreht ist. Das gesamte Drehmoment schliesslich ist bestimmt durch die Summe
der Kräfte auf alle Leiter (L) mal den Rotorradius rR.
2
M =
L
r R F LB =
2
L
r R F LB =
nl R
2
2
- R r R B̂ cos 0 – R dt
L 2 ------RR
(4.17)
nl
2
2
d B̂ t
= 2 -------R- R r R B̂ t cos -------------- sin + R B̂ cos
L R
dt
R
Der Beitrag des ersten Terms (sin•cos) ergibt über alle Leiter aufsummiert null. Mit anderen Worten, die Flussänderung liefert keinen Beitrag zum Moment!
Nur der cos2 Term liefert einen Beitrag zum Drehmoment. Dieser ist bei konstanter
Flussdichte und konstanter Rotorfrequenz konstant.
Interpretation des Resultates: Die Kraft auf die Leiter ist einmal abhängig von den Abmessungen des Rotors, rR und lR. Die zweite Einflussgrösse ist die magnetische
39
4 Beschreibungen von Drehfeldmaschinen
Flussdichte B im Luftspalt, diese geht quadratisch in die Kraft ein. Schliesslich ist die
Differenz R zwischen Winkelgeschwindigkeit S des Statorfeldes und der mechanischen Drehzahl der Rotorwicklung me relevant. Diese Drehzahldifferenz geht linear in
die Rechnung ein. Für das Drehmoment wird die Kraft auf die Leiter mit dem Radius
multipliziert. Damit wird dieses Drehmoment quadratisch vom Radius abhängig.
4.2.2 Ersatzschaltung der ASM
Für die Beschreibung der ASM hat sich bei Netzanwendungen der Schlupf s eingebürgert. Er gibt an, um wieviel die mechanische Drehzahl von der synchronen Drehzahl abweicht. Die Abweichung wird dabei zusätzlich auf die synchrone Drehzahl bezogen. Die
synchrone Drehzahl selber ist die Drehzahl, bei welcher der Rotor synchron mit dem Statorfeld dreht, welches von elektrischen Grössen mit der Frequenz S erzeugt wird. Bei
der synchronen Drehzahl gilt somit: S = p me .
Im Zusammenhang mit Stromrichtern ist oft die elektrische Frequenz im Rotor
R = S – p me von Interesse. Die verschiedenen Grössen verhalten sich zueinander gemäss (4.18).
S – p me
- = ------Rs = -------------------------S
S
(4.18)
Die resultierende Ersatzschaltung einer ASM entspricht der Ersatzschaltung eines Transformators gemäss Bild 4.9. Die Transformation der sekundärseitigen Grössen auf die Primärseite durch das Windungsverhältnis wird oft mit (´) symbolisiert. Dieser Hinweis
wird später der Einfachheit halber aber wieder weggelassen.
Statorseite
IS
RS
I0
LS
US
Lh
Im
ZS
Bild 4.9.
IR´
RFe
Luftspalt
P
Uq
Rotorseite
LR´
RR´
Uq,R´= UqR/S
IR´
PR
UR´
IFe
Zh
ZR
Ersatzschaltung eines Stranges der Asynchronmaschine zur Herleitung der vollständigen Transformation aller Grössen auf die Statorseite
Die Übersetzung der Spannung unterliegt bei einer Maschine im Vergleich zu einen
Transformator einem zusätzlichen Einfluss: Durch die symmetrische Speisung des Stators entsteht im Luftspalt der harmonische Verlauf der magnetischen Flussdichte, der bei
konstanter Amplitude mit der Frequenz S dreht. Die durch diesen Fluss in der Rotorwicklung induzierte Spannung ist abhängig von der Drehgeschwindigkeit me des Ro-
4.2 Asynchronmaschinen im stationären Betrieb
40
tors: Steht er still, so ist die Flussänderungsgeschwindigkeit maximal, dreht der Rotor
gleich schnell wie das Feld, d.h. S = pme so ist die Änderungsgeschwindigkeit null. Für
die im Rotor induzierte Spannung gilt damit (4.19).
S – p me
U q R' = U q -------------------------- = U q ------RS
S
(4.19)
Die gleiche Spannung lässt sich auch durch den Rotorstrom, die Frequenz im Rotor und
eine eventuelle Spannungsquelle im Rotorkreis ausdrücken (4.20).
U q R' = U q ------R- = – I R' j R L R' + R R' + U R
S
(4.20)
Wird (4.20) nun nach Uq aufgelöst, so lässt sich die Drehzahlabhängigkeit einfach mit
einem schlupfabhängigen Rotorwiderstand und der ebenfalls schlupfabhängigen Spannung an den Rotorklemmen modellieren (4.21).
R R' U R
U q = – I R' j S L R' + R R' ------S- + U R' ------S- = – I R' j S L R' + ------- + ------s
s
R
R
(4.21)
Der Widerstand R R' und auch eine eventuelle Spannung U R' werden so schlupfabhängig
auf die Statorseite ‘transformiert’ und es resultiert die Ersatzschaltung nach Bild 4.10.
Luftspalt
Statorseite
IS
RS
I0
LS
US
Lh
Im
ZS
RFe
LR´
Rotorseite
RR´/s
RR´
IR´
UR´/s
Uq
Rme
RR´/s
IFe
Zh
ZR
Bild 4.10. Transformator-Ersatzschaltung eines Stranges der Asynchronmaschine:
links: mit offenen Rotorklemmen; rechts mit aufgeteiltem Rotorwiderstand
Aus (4.21) lässt sich direkt der Rotorstrom (4.22) bestimmen,
U R' – U q s
I R' = ----------------------------------j R L R' + R R'
(4.22)
und mit dem Rotorstrom der Leistungsfluss: In den Rotor fliesst die Luftspaltleistung P
und die an den Rotorklemmen eingespeiste Leistung PR. Ausgedrückt durch Strom und
Rotorgrössen resultiert dafür (4.23).
41
4 Beschreibungen von Drehfeldmaschinen
U R'
2 RR
P R tot = P + P R = 3 Re U q – I R' + Re -------- I R' = 3 I R' ------ s
s
(4.23)
Die im Idealfall an der Welle verfügbare Leistung Pme ist die gesamte in den Rotor fliessende Leistung PR,tot, abzüglich der Verluste PV im Rotorwiderstand R R' gemäss (4.24).
2 R R'
2 1–s
P me = 3 I R' ------- – R R' = 3R R' I R' -----------
s
s
(4.24)
Diese Gleichung kann mit zwei Widerständen modelliert werden: Dem effektiven Wicklungswiderstand R R' und einem „mechanischen Widerstand“, in dem die an der Welle zur
Verfügung stehende Wirkleistung auftritt. Diese Aufteilung ist in Bild 4.10 gezeigt.
1
R me = R R --- – 1 = R R ------S- – 1
s
R
(4.25)
Rme in (4.25) ist also von der Statorfrequenz und der Drehzahl abhängig. Er kann abhängig von der Betriebsart der Maschine positiv oder negativ sein.
Bei bekannter mechanischer Leistung kann direkt auch das mechanische Moment bestimmt werden (4.26).
M me = P me me = pP me S 1 – s
(4.26)
Mit Einsetzen von (4.24) in (4.26) folgt schliesslich (4.27).
2
2
R R' I R'
R R' I R'
M me = 3 p -------------------= 3 p -------------------s S
R
(4.27)
Für die effektive an der Welle zur Verfügung stehenden Leistung Pme müssen von der
Leistung in Rme schliesslich noch die Reib- und Lüfter-Verluste abgezogen werden. Das
Gleiche gilt natürlich auch für das Drehmoment Mme.
Im Widerstand RS fallen die Statorverluste an, in RFe die Eisenverluste und in RR die
Verluste der Rotorwicklung.
Kurzschlussläufermaschine: Im einfachen Fall der Kurzschlussläufermaschine ist die
Spannung UR= 0 und für den Strom im Rotor resultiert:
–U q s
I R' = ----------------------------------j R L R' + R R'
Die restlichen Berechnungen ändern nicht.
(4.28)
4.2 Asynchronmaschinen im stationären Betrieb
42
Die Arbeit mit der Ersatzschaltung gestaltet sich bei Verwendung der komplexen
Wechselstromrechnung sehr einfach. Ausgehend von den drei Impedanzen ZS, Zh und ZR
in (4.29), (4.30) und (4.31) lassen sich für die Kurzschlussläufermaschine z.B. Statorstrom (4.32), Rotorstrom (4.34) und Drehmoment (4.35) in Funktion des Schlupfes bestimmen:
Z S = R S + j S L S
(4.29)
Z h = R Fe j S L h R Fe + j S L h
(4.30)
Z R = R R' s + j S L R'
(4.31)
I S = U S Z S + Z h Z R
(4.32)
U q = I S Z h Z R
(4.33)
I R' = – U q Z R
(4.34)
P me = 3R me I R'
2
= M me me
(4.35)
Als Beispiel sind in Bild 4.11 der Verlauf des Drehmomentes und des Statorstromes in
Funktion der Rotorkreisfrequenz R vorgestellt. Die betrachtete Maschine wird dabei mit
Nennspannung und Nennfrequenz angespeist und die auf die Nennfrequenz der Maschine bezogene Nennrotorfrequenz beträgt s= R/n= 3.33%.
In den Simulationen bedeutet Frequenz R= 0 synchrone Drehzahl, eine negative Rotorkreisfrequenz Generatorbetrieb und eine positive Motorbetrieb. Die resultierenden Darstellungen können im Vergleich zu anderen üblichen Maschinenkennlinien in Funktion
des Schlupfes etwas irritieren. Im Zusammenhang mit der später folgenden Stromrichterspeisung sind sie aber informativer.
M
Mb
IS
MK
Ib
M(fR)
IS(fR)
sK
(Gen.)
(Mot.)
n
R
(Gen.)
(Mot.)
n
Bild 4.11. Links: Bezogenes Drehmoment der ASM in Funktion der Rotorkreisfrequenz,
rechts: Bezogener Statorstrom in Funktion der Rotorkreisfrequenz
R
43
4 Beschreibungen von Drehfeldmaschinen
Mit den hergeleiteten Gleichungen lassen sich verschiedene Kenngrössen der ASM bestimmten. Häufig interessieren das maximale Moment, das Kippmoment MK, und der zugehörige Kippschlupf sK, beziehungsweise die Kipp-Rotorfrequenz R,K.
Beides lässt sich durch die ‘Kloss'schen Gleichungen’ in (4.36), (4.37) und (4.38) für
Motorbetreib ausdrücken. Dabei werden die folgenden Substitutionen verwendet:
L S = L h + L S ; L R = L h + L R' ;
Die zusätzlich angegebenen Näherungen gelten einmal für den Fall, dass die beiden
Streuinduktivitäten LS und LR klein gegenüber Lh sind - was bei normalen Maschinen
vorausgesetzt werden kann. Zusätzlich wird angenommen, dass RS gegenüber SLS vernachlässigt werden kann, wie das beispielsweise bei direkten Netzbetrieb der Falle ist.
Die Näherung in (4.38) für das Moment M ausgedrückt durch das Kippmoment MK gilt,
bis etwa zum halben Kippschlupf, was in den meisten Fällen den zulässigen Betriebsbereich gut abdeckt.
2
2
RS + S LS
R R'
R R'
R K
s K = ------------ = ------------- ------------------------------------- ------------------------------------S
S L R R 2 + L 2 S L S + L R
S
S S
2
MK
2
L h L S L R
3 pU
= --------------S- ---------------------------------------------------------------------------------------------------------------------------------------------2 S
2
2
2
2
2
R S L h L S L R + R S + S L S 1 + R S S L S
2
3 pU S
(4.36)
(4.37)
2
Lh
L S L R
--------------- -------------------------------------------------------------------------------------------2
2 S R L L L + L + L
S h
S R
S S
R
R K
R
s sK
R
s- 2M ----------M = 2M K ----- + ------ = 2M K ------------ + ------------ 2M K ----K
R
R K
sK
sK s
R K
(4.38)
4.2.2.1 Vereinfachte Ersatzschaltungen der Kurzschlussläufer-ASM
Neben der vorgestellten vollständigen Transformatorersatzschaltung existieren strukturell einfachere Darstellungen: Stator- und Rotorstreureaktanz lassen sich beispielsweise
in eine einzige Streureaktanz zusammenfassen. Wie in Bild 4.12 gezeichnet, kann diese
auf die Stator- oder Rotorseite umgerechnet werden. Dabei ändert auch der Rotorwiderstand RR. Der Eisenverlustwiderstand RFe kann bei Bedarf in guter Näherung als Verlustwiderstand über den Klemmen nachgebildet werden.
Auf die explizite Kennzeichnung der auf die Primärseite transformierten Rotorgrössen
mit (´) wird nachfolgend verzichtet
4.2 Asynchronmaschinen im stationären Betrieb
a)
IS
RS
US
b)
Im
LS
Lh
IS
RS
Lh,S
US
Uq
Uq,S
IR
Rme = RR(1-s)/s
RR/s
c)
IR,S
LS
RR
LR
44
IS
RR,S/s
LR IR,R
RS
Lh,R
US
Im,S
Uq,R
RR,R/s
Im,R
Bild 4.12. Transformatorersatzschaltungen der ASM im stationären Betrieb:
a) Streureaktanzen auf Stator- und Rotorseite verteilt,
b) Streureaktanz auf Statorseite reduziert (Index S),
c) Streureaktanz auf Rotorseite reduziert (Index R).
Für die Umrechnungen zwischen den drei Schaltungen in Tabelle 4.2 werden drei
Streukoeffizienten eingeführt: Der Statorstreukoeffizient S, der Rotorstreukoeffizient
R und der Streukoeffizient für identische Stator- und Rotorstreuung (nicht zu verwechseln mit dem ‘Koeffizienten der totalen Streuung’). Alle drei sind in (4.39) definiert.
S = L S L h ;
R = L R L h ;
(4.39)
= L S + L R 2L h
Alle Umrechnungen gelten nur für kleine Rotorfrequenzen - sie sind im Normalfall unterhalb der Kipp-Rotorfrequenz erfüllt. Unter der normalerweise erfüllten Voraussetzung, dass die Streuung wesentlich kleiner als eins ist, können für die praktische Anwendung alle Umrechnungen weiter vereinfacht werden, wie zusätzlich in Tabelle 4.2 angegeben. In der Tabelle wird von der vollständigen Ersatzschaltung der ASM a) in Bild 4.12
ausgegangen.
Tabelle 4.2. Umrechnung von der vollständigen auf die reduzierten ASM-Ersatzschaltungen
Schaltung
a)
b)
c)
Statorwiderstand
RS
RS
RS
Hauptinduktivität
Lh
Lh
--------------- Lh 1 –
1 + R
Lh 1 + S Lh 1 +
Streuinduktivität
L S
Lh 1 + S – 1 1 + R
L h 2
L R = 0
45
4 Beschreibungen von Drehfeldmaschinen
Tabelle 4.2. Umrechnung von der vollständigen auf die reduzierten ASM-Ersatzschaltungen
Schaltung
a)
b)
c)
Lh 1 + S S + R + S R
Streuinduktivität
L R
L S = 0
Rotorwiderstand
RR
R R 1 + R R R 1 – 2
R R 1 + S R R 1 + 2
Magnetisierungsstrom
Im
Im + R I R Im + I R
Im + S I S
------------------------ Im – I R
1 + S
Rotorstrom
IR
I R1 + R I R1 +
I R 1 + S I R 1 –
L h 2
2
2
4.2.2.2 Nichtidealitäten in der Ersatzschaltung
In den Ersatzschaltungen der ASM werden die Ersatzelemente üblicherweise als konstant angenommen. Dies entspricht nicht der Realität. Die wichtigsten Nichtidealitäten
werden nachfolgend vorgestellt, in den Modellen aber, falls nicht speziell erwähnt, nicht
weiter berücksichtigt. Die Beschreibungen der Einflüsse sollen eine Hilfe beim Aufspüren von Abweichungen zwischen Simulationen und Messungen sein.
Hauptinduktivität:
Wird die Maschine mit Nennspannung betrieben, so ist sie meist im Übergansbereich zur
magnetischen Sättigung. Im Betrieb mit reduzierter Spannung steigt durch den Abfall der
Magnetisierung die Induktivität deshalb an, wie in Bild 4.13 dargestellt; in extremen Fällen bis zu 50%. Dadurch nimmt der notwendige Magnetisierungsstrom überproportional
ab. Dies ist speziell bei Feldschwächung zu beachten. Der Induktivitätsverlauf lässt sich
mit Hilfe der Leerlaufkennlinie der Maschine bestimmen. Für die Modellierung des Phänomens müssen nichtlineare Induktivitäten eingesetzt werden, was bei der mathematischen Behandlung aufwendiger wird.
Im
Im,0
Lh
Lh,n
Im,n
Lh,0
Im
Uq,n Uq,0
Uq
Bild 4.13.
Leerlaufkennlinie Im=f(Uq)
und Hauptinduktivität Lh =f(Uq)
der Asynchronmaschine
(n: Nennbelastung; 0: Leerlauf)
Statorkreis: Für (sehr) hohe Frequenzanteile macht sich die Stromverdrängung in RS bemerkbar. Sie führt zu einem scheinbaren Ansteigen des ohmschen Widerstandes und ei-
4.2 Asynchronmaschinen im stationären Betrieb
46
nem leichten Absinken der Induktivität LS. Der Effekt ist wesentlich weniger ausgeprägt, als im nachfolgenden Rotorkreis.
Rotorkreis: Durch die markant grösseren Leiterabmessungen ist der Einfluss der Stromverdrängung vor allem bei Käfigläufer-Maschinen wesentlich grösser, beträgt doch die
‘Eindringtiefe’ des Stromes bei 50 Hz nur noch etwa 9 mm in Kupfer und 12 mm in Aluminium! Der Rotorwiderstand RR steigt für höhere Frequenzen stark an und die Streuinduktivität LR sinkt wiederum leicht ab. Die Frequenzabhängigkeit kann mit Kettenleiter-Ersatzschaltungen beschrieben werden. Das resultierende Modell des Rotors ist weiterhin linear.
Es ist zu beachten:
- Viele Norm-Maschinen sind so ausgelegt, dass sich durch die Stromverdrängung beim
Anlauf ein erhöhtes Drehmoment ergibt.
- Bei Stromrichter-Speisung hat die Stromverdrängung für die Grundfrequenz kaum
eine Bedeutung, da nicht mit grossen Rotorfrequenzen gefahren wird. Sie kann sich
aber bei Stromharmonischen durch erhöhte Verluste am bei diesen Frequenzen grösseren Rotorwiederstand bemerkbar machen.
Temperaturabhängigkeit von Stator- und Rotorwiderstand: Die Wicklungstemperaturen, und damit Stator- und Rotorwiderstand in der Ersatzschaltung, variieren in einem
grossen Bereich. Eine Statorwicklung erreicht schnell einmal 85°C, eine Rotorwicklung
mehr als 150°C. Bezogen auf eine Ausgangstemperatur von 20°C und einem Temperaturkoeffizienten = 0.004/°C (Aluminium und Kupfer) steigt der Widerstand der Statorwicklung typisch um über 25% und derjenige der Rotorwicklung um mehr als 50% an
(4.40).
R = R 0 1 +
(4.40)
Ist der Betriebstemperaturbereich noch grösser, wie das z.B. bei Lokomotiven der Fall
ist, ändern die Werte noch extremer.
Die verschiedenen Abhängigkeiten illustriert Bild 4.14. Zusätzlich ist auch noch die Abhängigkeit der Eisenverluste in RFe von Stator- und Rotorfrequenz sowie Magnetisierungs- und Rotorstrom angedeutet:
IR´
IS
US
RS(ϑ)
I0
LS
Lh(Im)
Im
RFe
LR´
Uq
RR´(ϑ, R)/s
IFe
Bild 4.14. Illustration der Abhängigkeiten der Ersatzelemente
UR´/s
47
4 Beschreibungen von Drehfeldmaschinen
4.3 Raumzeigerdarstellung von DFM
Die Raumzeigerdarstellung (RZ-Darstellung) der mehrphasigen Drehfeldmaschinen ist
ein sehr leistungsfähiges Hilfsmittel zur Beschreibung des Maschinenverhaltens. Sie
wird schon sehr lange verwendet, zum Teil unter den Bezeichnungen Zweiachsendarstellung oder Vektordarstellung. Der Ausdruck ‘Zweiachsendarstellung’ deutet an, um was
es sich bei der Raumzeigerdarstellung handelt: Einflüsse und Verhalten der drei über den
Umfang der Maschine symmetrisch verteilten Wicklungen U, V, W werden in einem orthogonalen System mit nur zwei Achsen beschrieben. Die dreiphasige Maschine muss im
allgemeinen Fall durch drei Gleichungssätze beschriebenen werden. Damit sich die Gleichungen auf zwei Sätze reduzieren lassen, muss die Beschreibung durch drei Gleichungssätze mathematisch überbestimmt sein. Dies ist in den praktisch interessanten Fällen normalerweise erfüllt.
Die Gleichungssysteme werden als Vektorgleichungen mit jeweils zwei Elementen zusammengefasst, womit eine mathematisch kompakte Form resultiert. Bekanntlich können komplexe Zahlen ebenfalls als Vektoren mit nur zwei Elementen aufgefasst werden.
Es hat sich eingebürgert, die Raumzeiger (RZ) als komplexe Zahlen darzustellen. So
kann mit den bekannten Darstellungen und Rechenregeln der komplexen Zahlen gearbeitet werden. Nur vereinzelt wird die Auftrennung in die beiden Komponenten notwendig.
Es ist üblich, die resultierenden Zeiger in den physikalischen Aufbau der Maschinen
‘hinein zu interpretieren’. Dies ist aber nur für die magnetischen Flussdichte im Luftspalt
wirklich korrekt, wie das in Kapitel 4.1.1. diskutiert ist. Deshalb wird die Darstellung anschliessend wieder am Beispiel der Flussdichte eingeführt.
Für die Zeigerdarstellung werden verschiedene Koordinatensysteme verwendet:
- das statorfeste -System, welches bezüglich des Stators der Maschine still steht. Die
entsprechende Transformation wird nach der Erfinderin Edith Clarke auch als ClarkeTransformation bezeichnet.
- das rotorfeste dq-System, welches bezüglich des Rotors steht. Diese wurde von Robert
Park entwickelt und die Transformation wird als Park- Transformation bezeichnet.
(Die dq- Bezeichnung wird zum Teil auch für die Darstellung der ASM bei RotorflussOrientierung des Koordinatensystems verwendet.)
- das drehfeldfeste (flussfeste) xy-System, das bezüglich des gewählten Drehfeldes steht
- Koordinatensysteme, die mit einer beliebigen Frequenz drehen.
Im Weiteren wird für die ASM das statorfeste - sowie das drehfeldfeste xy-System
und für die SM das rotorfeste dq-System verwendet.
Die RZ-Beschreibung ist das bevorzugte Werkzeug für die Modellierung des stationären und des dynamischen Verhaltens von DFM zusammen mit Stromrichtern. Damit ist
es möglich, die Speisegrössen der Maschine in feld- und in drehmomentbildende Komponenten zu zerlegen. So lassen sich handliche, qualitativ hochstehende Regelkonzepte
realisieren, wie sie für Gleichstromantriebe seit langem bekannt sind.
4.3 Raumzeigerdarstellung von DFM
48
4.3.1 Raumzeiger
Wie die Flussdichte durch die Statorströme ausgedrückt werden kann, wurde in 4.1.1 hergeleitet. Um die Beschreibung der Flussdichte als harmonischen Funktion über dem Umfang der Maschine zu umgehen, wird der Scheitelwert der resultierenden harmonischen
Funktion mittels eines Zeigers in der Querschnitt-Ebene durch den Stator, im ‘Raum’ der
DFM, dargestellt. Die Flussdichte selber ist eine Funktion der Momentanwerte der drei
Wicklungsströme iU, iV und iW. Zusammen mit der getroffenen Voraussetzung des harmonischen Verlaufes sind die Grössen so zu jedem Zeitpunkt exakt durch einen Vektor
mit zwei Komponenten beschrieben. Mit der Darstellung der Vektoren als komplexe
Zahlen ist die Ebene damit die komplexe Zahlenebene und es gelten die entsprechenden
Rechenregeln.
Die räumliche Verdrehung der drei Wicklungssysteme um 2/3 und 4/3 kann mit den
komplexen Drehoperatoren a und a2 gemäss (4.41) beschrieben werden.
a = e
j 2 3
2
= –1 2 + j 3 2 ;
a =e
j 4 3
= –1 2 – j 3 2
(4.41)
Damit resultiert für die Flussdichte im ‘Raum’ der Zeiger (4.42). Seine Komponenten
entsprechen den momentanen Scheitelwerten der beiden in Bild 4.4 dargestellten harmonischen Funktionen. Der Vergleich mit den Scheitelwerten der Komponenten in (4.7) bestätigt die Aussage.
2
B t = k m 1i U t + ai V t + a i W t = k m 2 2i U – i V – i W + j 3 i V – i W (4.42)
Dargestellt in der stillstehenden -Ebene in Bild 4.15 ist dies ein Zeiger, dessen Winkel
und Länge durch die Momentanwerte von iU, iV und iW zu jedem Zeitpunkt exakt bestimmt sind. Die reellen Komponenten liegen auf der -Achse, die komplexen auf der Achse des Koordinatensystems.
„a“
------32
(t)
-1/2
„1“
„a2“
B(t)
Bild 4.15.
Einheitsvektoren 1, a und a2,
sowie Flussdichte B(t) in der -Ebene
Darstellung weiterer Maschinengrössen als Zeiger: Die Integration der Flussdichte
B(t) über die Luftspaltfläche A (Umfang mal Statorlänge) ergibt den Luftspaltfluss
t = B t d A und zusammen mit der Windungszahl die Flussverkettung (t). Diese
wird wieder als Zeiger (t) dargestellt, obwohl sie dies genaugenommen nicht ist.
49
4 Beschreibungen von Drehfeldmaschinen
Analog zu den magnetischen werden auch für die elektrischen Grössen u(t) und i(t)
‘elektrische’ Raumzeiger definiert. Deren Interpretation im Raum ist nicht in der gleichen Art möglich, wie dies für das magnetische Feld eingeführt wurde. Sie dienen primär
der Reduktion von drei reellen Gleichungen auf eine komplexe.
Normierung von Raumzeigern: Die Länge der Raumzeiger entspricht den Scheitelwerten der jeweiligen Grössen. Deshalb werden für die Normierung von Raumzeigern die
Scheitelwerte von Spannung und Strom verwendet: U B = 2U nPh ; I B = 2I n . So ergeben sich die gleichen Resultate bei der Verwendung von bezogenen Grössen.
In diesem Text wird im Weiteren auf die Normierung von Raumzeigern verzichtet.
4.3.1.1 Umrechnung zwischen Klemmengrössen und Zeigern
An den Maschinen sind für den Anwender nach wie vor nur die Tripel der Klemmengrössen xU,V,W zugänglich. Um mit den Gleichungen in Raumzeigerdarstellung arbeiten zu
können, müssen die Klemmengrössen in Zeiger x und umgekehrt die RZ wiederum in
dreiphasige Klemmengrössen transformiert werden.
Skalierung der Zeigerlängen: Für die Anwendung hat es sich als praktisch erwiesen,
die Längen der Zeiger mit dem Faktor 2/3 zu skalieren. Wird die RZ-Transformation so
auf Klemmengrössen angewendet, so entsprechen die resultierenden Zeigerlängen bei einem symmetrischen Dreiphasensystem den Amplituden der drei Zeitfunktionen.
3Ph-Transformation: Für die Transformation der dreiphasigen Grössen in Raumzeiger gilt (4.43) und der entsprechende ‘Transformationsblock’ in Bild 4.16 links.
x = x + jx = 2--- x U + – 1--- + j ------3- x V + – 1--- – j ------3- x W
2
2 2
3
2
x = 1 3 2x U – x V – x W ;
xU
xV
xW
3Ph
x
x
y
y
x = 1 3 xV – xW
yU
yV
3Ph
yW
Bild 4.16.
Links: 3Ph - Transformator
rechts: 3Ph - Transformator
(4.43)
4.3 Raumzeigerdarstellung von DFM
50
Die -Komponenten lassen sich auch direkt aus den verketteten Grössen bestimmen.
Dies ist speziell für die Klemmenspannungen interessant, sehr oft sind ja nur diese messbar . (Die Herleitung wird in der Übung C.2.3. gemacht)
x = 1 3 x UV – x WU ; x = 1 3 x VW
3Ph- Transformation:
Randbedingung für die Rücktransformation: Für die Rücktransformation von zwei auf
drei Grössen wird eine zusätzliche Information benötigt, da sonst das Gleichungssystem
unterbestimmt und somit nicht lösbar ist. Die benötigte Information liefert die folgende
Einschränkung aus der Praxis:
Maschinen sollen maximal magnetisiert werden, ohne das Eisen zu sättigen. Damit
keine Magnetisierung auftritt, die über den Umfang nicht zum Drehmoment beiträgt,
werden DFM dazu in allen praktisch relevanten Fällen so gespeist, dass die Summe der
Statorgrössen xU, xV und xW null ist. So treten keine Gleichtaktsysteme auf (Kapitel 4.7).
Für den praktisch unbedeutenden Fall, dass trotzdem ein Gleichtaktsystem existiert, sei
auf die weiterführende Literatur verwiesen, z.B. auf [Kle1].
Ist die Summe von xU, xV und xW wie angesetzt gleich null, so wird die Rückrechnung
von Zeiger auf Dreiphasengrössen nach (4.44) eindeutig. Beachte vor allem: x = x U !
xU = x ;
x V = 1 2 3x – x ;
xW = 1 2 – 3 x – x
(4.44)
Die Rücktransformation wird mit dem Funktionsblock in Bild 4.16 rechts symbolisiert.
4.3.1.2 Tansformationen zwischen Koordinatensystemen
Das bis dahin verwendete statorfeste -Koordinatensystem steht bezüglich des Stators
der Maschine still: Die Realteile der Zahlen beschreiben die Komponente in Richtung der
-Achse, die Imaginärteile diejenige in Richtung der -Achse. Wie schon erwähnt, werden noch weitere Koordinatensysteme verwendet. Existiert die Beschreibung der Maschine in einem System, so können die Gleichungen auch in andere Systeme transformiert werden. Dabei wird auch in den neuen Gleichungssystemen weiter mit komplexen
Zahlen gearbeitet: Mit einer imaginären und einer reellen Achse, die jetzt aber anders orientiert sind oder gar rotieren.
Das Prinzip der Transformation wird für den Fluss betrachtet, da von diesem in den
nachfolgenden DFM-Modellen zusätzlich auch die Ableitung transformiert werden
muss. Ausgangssystem sei das stillstehende -System. Bezogen darauf ist das xy-System um den (zeitabhängigen) Winkel (t) verdreht; rotiert es, so gilt:
51
4 Beschreibungen von Drehfeldmaschinen
t
t = 0 + K d .
(4.45)
0
K ist dabei die Winkelgeschwindigkeit des rotierenden xy-Koordinatensystems.
Y
(t)
(t)
Bild 4.17.
Zeigertransformation zwischen verschiedenen
Koordinatensystemen mit
x
(t)
(t)
t
t = 0 + K d
0
Für die Beschreibung des Zeigers (t) in den beiden Systemen gilt (4.46); der Zeiger
wird bei der Transformation einfach um den Winkel (t)vor- oder zurückgedreht.
t = t e
j t
= t xy e
j t
t xy = t e
;
– jt
(4.46)
Um die Transformation für die Ableitung d(t)/dt zu erhalten, muss (4.46) unter Anwendung der Kettenregel nach der Zeit abgeleitet werden, es folgt (4.47). Wird zusätzlich
auch noch d dt = K verwendet, so resultiert die meistverwendete Form in (4.48).
d t
d t xy j t
j t
d- t e j t = ------------------+ j t xy d
----- e
-------------------- = ----e
xy
dt
dt
dt
dt
(4.47)
d t
d t xy
j t
--------------------- = ------------------- + j K t xy e
dt
dt
(4.48)
(Auf die explizite Kennzeichnung der Zeitabhängigkeit (t) wird nachfolgend verzichtet.)
Verschiedene Darstellungen der Drehoperation: Die Drehung mit ej kann auf verschiedene Arten dargestellt werden: Unter Verwendung der Eulerschen Beziehung in
(4.49) oder als Matrizen-Multiplikation in (4.50).
e
j
= cos + j sin
=
= xy cos + j sin
x cos – y sin
x sin + y cos
=
cos – sin x
sin cos y
(4.49)
(4.50)
4.3 Raumzeigerdarstellung von DFM
52
Für Drehungen im Uhrzeigersinn sind die Winkel entsprechend negativ einzusetzen.
Klemmengrössen und Zeiger im rotierenden Koordinatensystem: Die Transformation der Klemmengrössen in Zeiger im drehenden Koordinatensystem wird mit Vorteil in
zwei Schritte aufgeteilt: Die Transformation vom Dreiphasensystem in die -Darstellung und anschliessend auf das rotierende System. Aus (4.43) und (4.47) folgt entsprechend (4.51).
x xy = x e
– j
= x + jx e
– j
– j
= 2--- x U + – 1--- + j ------3- x V + – 1--- – j ------3- x W e
2
2 2
2
3
(4.51)
– j
– j
1
1
= --- 2x U – x V – x W e – ------- x V + x W e
3
3
Für die Rücktransformation werden die Drehzeiger mit (4.52) in -Darstellung und diese anschliessend wie in (4.44) in die drei Zeitfunktionen zerlegt.
y = y xy e
j
(4.52)
y V = 1 2 3 y – y ;
yU = y ;
yW = 1 2 – 3 y – y
In Bild 4.18 werden die Drehungen um den Winkel (t) mit Vektordrehern dargestellt.
e-j
xU
xV
xW
3Ph
x
x
ej
xx
xy
xy
DFMModell
yx
yy
xy
y
y
yU
yV
3Ph
yW
Bild 4.18. DFM-Blockschaltbild im rotierenden Koordinatensystem mit Ein- und Ausgangsgrössen sowie Vektordrehern
53
4 Beschreibungen von Drehfeldmaschinen
4.4 Asynchronmaschine in Raumzeigerdarstellung
Für die dynamische Beschreibung der Maschinen in Funktion der Momentanwerte von
Spannungen, Strömen und Flüsse werden die Raumzeigergleichungen verwendet. Begonnen wird mit der Asynchronmaschine. Statt mit drei identischen, um je 120 Grad versetzten Transformatorersatzschaltungen, wird die Maschine mit zwei identischen orthogonalen Strängen dargestellt. Die Werte der elektrischen Elemente der Stränge werden
beibehalten. Für diese Darstellung müssen die elektrischen Grössen jetzt mit der vorgestellten u,v,w- -Umrechnung (mit Skalierung) von drei auf zwei Stränge umgerechnet
werden. Der in Kapitel 4.2.2 bei der Ersatzschaltung für den stationären Betrieb verwendete Eisenverlustwiderstand RFe wird der Einfachheit halber vernachlässigt. Die Rotorgrössen entsprechen nach wie vor den auf die Primärseite transformierten Grössen. Zur
Vereinfachung der Schreibweise bei den RZ-Gleichungen wird auf die Kennzeichnung
mit (') verzichtet. Im stationären Betrieb kann genau gleich wie bisher gerechnet werden,
nur müssen für die gesamte Leistung statt der Leistung von drei Strängen die von zwei
zusammen gezählt werden.
Auf die detaillierte Herleitung der Gleichungen aus dem Aufbau der Maschine wird
verzichtet, dazu sei auf die Literatur verwiesen, z.B. [Kle1] [Mil1]. Die Gleichungen
werden über die elektrischen Grössen interpretiert.
iS,
S
uS,
Statorseite
h
Stator
R
Rotor
iS
iS,
RS
uS
Rotorseite
LS
LR
LS; S Lh
RR
iR
LR; R
uR
im
uS,
Bild 4.19. Asynchronmaschine und Ersatzelemente für die Raumzeigerbeschreibung
(rote Verbindung: Kurzschlussläufer mit uR= 0)
4.4.0.1 Voraussetzungen für die RZ-Darstellung
Wenn nicht speziell angegeben werden bei der RZ-Darstellung von DFM verschiedene
Randbedingungen, von denen einige schon besprochen wurden, als erfüllt vorausgesetzt:
a)Die magnetischen Eigenschaften, und damit die Ersatzelemente der Maschine, sind
zeitlich konstant und linear. Insbesondere tritt keine Sättigung auf.
4.4 Asynchronmaschine in Raumzeigerdarstellung
54
b)Der Strombelag, und in der Folge die magnetische Flussdichte, sind über dem Luftspalt-Umfang sinusförmig, d.h. es tritt nur deren Grundschwingung auf.
c)Alle Ersatzelemente sind Temperatur unabhängig.
d)Die Eisenverluste sind vernachlässigbar klein; im Modell sind sie Null gesetzt.
e)Die Summe der Wicklungsströme ist null, d.h. es tritt keine Null- oder Gleichtaktkomponente in den Strömen und im magnetischen Feld auf.
4.4.1 Gleichungen im stillstehenden Koordinatensystem
Eingeführt werden die Maschinengleichungen der ASM im statorfesten -Koordinatensystem. Zentrale Grösse bei dieser Darstellung sind die Flüsse in der Maschine als innere Maschinen Zustände. Die vollständige Beschreibung von Stator- und Rotorkreis der
ASM mit RZ ergibt das System von fünf komplexen und einer reellen Gleichung in
(4.53) bis (4.58). Drei der Gleichungen sind Differentialgleichungen erster Ordnung,
zwei komplexe und eine skalare, was ein System 5. Ordnung ergibt. Durch die Koppelungen zwischen den Gleichungen wird die ASM- Beschreibung nichtlinear.
d
u S = R S i S + ----------Sdt
(4.53)
d
u R = R R i R + -----------R – j p me R
dt
(4.54)
2
L
LS L R – Lh
S = L S i S + L h i R = R ------h + i S -----------------------LR
LR
(4.55)
2
R = Lh iS + L R i R
L
LS L R – Lh
= S ------R + i R -----------------------Lh
Lh
(4.56)
3p
3p L
M me = pM el = ------- Im S i S = ------- ------h Im R i S
2
2 L R
(4.57)
me = --1- M me – M Last dt
J
(4.58)
mit S, R
LS, LR
Lh
RS, RR
Stator- bzw. Rotorflussverkettung; (S*: konjugiert-komplex)
gesamte Induktivität der Stator- bzw. Rotorwicklung
(LS = LS +Lh bzw. LR = LR +Lh)
Hauptinduktivität (Kopplungsinduktivität)
Stator- bzw. Rotorwicklungswiderstand
55
4 Beschreibungen von Drehfeldmaschinen
Mme, ML
J
p
me
Mechanisches- bzw. Last-Drehmoment
Massenträgheitsmoment von Rotor plus Last
Polpaarzahl
Winkelgeschwindigkeit der Welle = 2fme
(Damit die Gleichungen die vorliegende einfache Form bekommen, ist der RZ des
Strombelages nicht auf das Strommaximum, sondern auf dessen Minimum gelegt. So liegen Strom- und Flusszeiger parallel. Der Stromzeiger weicht damit von der Definition in
Kapitel 4.3.1 ab. Dies sei an dieser Stelle aber nur der Vollständigkeit halber erwähnt.)
Rotorkreis: Bei der Kurzschlussläufer-ASM sind die Rotorwicklungen kurzgeschlossen, d.h. die Klemmenspannung uR in (4.54) ist null. In Anwendungen, in denen auch im
Rotor Quellen angeschlossen werden, muss abhängig von der Art der Quelle für uR die
Quellenspannung, beziehungsweise für iR der Quellenstrom eingesetzt werden.
4.4.1.1 Interpretation von Spannungs- und Flussgleichungen
Stator- und Rotorfluss sind durch die Ströme im Stator- und Rotorkreis bestimmt, wie das
der Ausschnitt aus der DFM im Bild 4.20 zusammen mit (4.59) veranschaulichen. Die
Kopplung der Flüsse findet über die Hauptinduktivität Lh, beziehungsweise den Hauptfluss h statt. Die Gleichungen sind direkt aus der Transformator-Ersatzschaltung der
ASM in Bild 4.19 ‘ersichtlich’.
Statorseite
S
S
iS
Luftspalt
h
Rotorseite
R
R
iR
Bild 4.20.
Stator-, Haupt- und Rotorfluss sowie Streuflüsse um die beiden Wicklungen
S = L S i S + L h i R = L h + L S i S + L h i R = L h i S + i R + L S i S
R = L h i S + L R i R = L h i S + L h + L R i R = L h i S + i R + L R i R
(4.59)
Der Zusammenhang zwischen Spannung und Flussverkettung in (4.53) und (4.54) wird
durch die Grundbeziehung u t = d dt = L di dt bestimmt. Dazu kommen noch die
ohmschen Spannungsabfälle.
Im stationären Betrieb können die Ableitungen der Flüsse allgemein berechnet werden,
was zu einer Vereinfachung führt. Stationärer Betrieb bedeutet, dass die Zeigerlänge und
die Winkelgeschwindigkeit mit der sie drehen konstant ist. Betrachtet wird ein Flusszeiger in (4.60) und seine Ableitung in (4.61).
4.4 Asynchronmaschine in Raumzeigerdarstellung
= e
j 0 + t
= Li = Lie
j 0 + t
56
(4.60)
j 0 + t
j 0 + t
j 0 + t
d
= ----- e
= je
= j = jLie
= jL
dt
(4.61)
Dreht die Maschine mit synchroner Drehzahl (‘Leerlauf’) ist der Rotorstrom null und es
ergibt sich die einfachste Form der Statorspannungsgleichung in (4.62) mit dem zugehörigen Zeigerdiagramm in Bild 4.21.
u S = R S i S + jL S i S = i S R S + jL S = i S R S + j L h + L S
(4.62)
uS
uL_S
iS
S
uR_S
0+t)
Bild 4.21.
Statorspannung, -strom und -fluss bei leerlaufender Maschine
Werden Statorfluss und Rotor gegeneinander verdreht, so wird eine zusätzliche Spannung induziert. Wird das System vom stillstehenden Stator aus betrachtet (-Darstellung), tritt diese in der Gleichung für die Rotorspannung auf. Sie wird je nach mechanischer Drehrichtung zur Ableitung des Flusses addiert oder subtrahiert. Im Normalbetrieb
der ASM, wenn Statorfeld und Rotor die gleiche Drehrichtung haben, wird durch die
Drehung die im Rotor induzierte Spannung verkleinert. Dies wird ersichtlich, wenn
(4.54) für stationären Betrieb, d.h. konstanter Amplitude von R umgeschrieben wird
(4.63). Eine weitere Umrechnung zeigt, dass dies in der Transformator-Ersatzschaltung
in Kapitel 4.2.2 der Vergrösserung von Rme bei kleiner werdendem Schlupf entspricht.
u R = R R i R + j S R – j p me R = R R i R + j R S – p me
(4.63)
4.4.1.2 Interpretation von Drehmoment- und Drehzahlgleichung
Aus den Strom- und Feld-Gleichungen lassen sich die Kräfte bestimmen, die auf die
stromdurchflossenen Leiter und damit auf Stator und Rotor wirken. Die Kräfte, die auf
die Wicklungen ausgeübt werden, sind bestimmt durch den Strom in der Wicklung
(Strombelag) und den Fluss am Ort der Wicklung.
Für die Bildung des Kreuzproduktes in der komplexen Ebene können nach (4.64) direkt die Komponenten in - und -Richtung (Real- und Imaginärteil) eingesetzt werden.
3p
3p
3p
M me = ------- Im S i S = ------- S i S – S i S = ------- L h Im i R i S
2
2
2
(4.64)
57
4 Beschreibungen von Drehfeldmaschinen
Gleichung (4.64) zeigt, dass vom Flusszeiger nur der zum Stromzeiger orthogonale
(senkrecht stehende) Teil kraftbildend ist. Das maximale Drehmoment resultiert also,
wenn Flusszeiger S und Stromzeiger iS senkrecht aufeinander stehen.
Die Drehmomentgleichungen lassen sich auch in Spannungsgleichungen umschreiben:
Bei drehender Maschine induziert der Fluss die innere Statorspannung uSi = jS. Wird
der Fluss in Kapitel 4.64 durch die Spannung ersetzt, so resultiert für das Moment:
3p
3 p u Si i S u Si i S
3p
M me = ------- Im S i S = ------- -------------------+ -------------------- = ------- u Si i S + u Si i S (4.65)
2
2
2
Die Gleichung liefert das Moment der zwei Stränge. In Realität sind nach wie vor drei
Stränge aktiv. Das wird mit der Multiplikation mit 3/2 berücksichtigt.
Liegen Fluss- und Stromzeiger parallel, wie in (4.62) beziehungsweise Bild 4.21, so resultiert gemäss (4.66) kein Moment - was im vorliegenden Leerlauffall ja sein muss.
2
3p
3p
3p
M me = ------- Im S i S = ------- Im L S i S i S = ------- L S Im i S = 0
2
2
2
(4.66)
Sind Drehmoment, Lastmoment und Massenträgheitsmoment bekannt, so lässt sich mit
(4.58) einfach die Drehzahl bestimmen. Bei realen Anwendungen sind dabei die mechanischen Verluste als Anteil des Lastmomentes einzusetzen.
4.4.2 Darstellung der Gleichungen für Simulationen
Für die Simulation auf analogen und digitalen Rechnern sollen Gleichungen wenn immer
möglich in Integralform vorliegen. Abhängig von der Art des Stromrichters, bzw. dessen
Regelung, werden die Gleichungen für Spannungs- oder Stromspeisung benötigt. Beide
werden am Beispiel einer Kurzschlussläufermaschine u R = 0 vorgestellt.
4.4.2.1 ASM mit Spannungsspeisung
Als erstes werden (4.53) und (4.54) integriert; es resultieren (4.67) und (4.68).
S = u S – R S i S dt
(4.67)
R = – R R i R + j p me R dt
(4.68)
Zur Vereinfachung werden (4.55) und (4.56) noch nach den Strömen aufgelöst.
L
L
i S = S ------R – R -----h-;
2
2
L
L
2
2
L = LS L R – Lh
(4.69)
4.4 Asynchronmaschine in Raumzeigerdarstellung
L
L
i R = – S -----h- + R -----S2
2
L
L
58
(4.70)
Damit kann das gesuchte Blockdiagramm der ASM mit Spannungsspeisung in Bild 4.22
gezeichnet werden, wie es für die Simulation benötigt wird.
Die Eingangsgrössen des Modells sind uS und ML.
Abhängig vom Simulationsprogramm müssen die Gleichungen eventuell noch in Realund Imaginärteil zerlegt werden - an der Struktur ändert dadurch aber nichts.
*
*
iR
iS
jp
+
RR
-
R
1/s
-
RS
uS
+
1/s
S
LS/L
+
Lh/L
-
Lh/L
-
LR/L
+
iR
iS
M
*
S*
ML
Mme
iS
*
Im
3p/
+
-
1/s
1/J
me
Bild 4.22. Blockdiagramm der ASM mit Spannungsspeisung in -Darstellung
Da in der Realität nur die Phasengrössen gemessen werden können, werden die Maschinenmodelle oft zusammen mit den Transformationen der Ein- und Ausgangsgrössen wie
in Bild 4.23 dargestellt.
xU
xV
xW
ML
3Ph
x
x
RaumZeiger
ASMModell
y
y
yU
yV
3Ph
yW
Mme
me
Bild 4.23.
ASM-Modell zusammen mit den ‘Transformatoren’ für die Ein- und Ausgangsgrössen
59
4 Beschreibungen von Drehfeldmaschinen
4.4.2.2 ASM mit Stromspeisung
Bei Speisung aus einer ‘Stromquelle’ sind statt uS und ML jetzt iS und ML die Eingangsgrössen. Einsetzen von (4.56) in (4.54) und umformen in Integralform ergibt (4.71). Zusätzlich wird auch (4.69) in (4.72) umgeformt. Zusammen mit (4.53) lässt sich damit die
Spannung uS bestimmen. Die notwendige Differenzierung führt bei der Simulation selbst
kaum zu Problemen, da uS nur als Ausgangsgrösse auftritt. Wird sie aber ausserhalb weiterverwendet, so ist Vorsicht geboten.
Als Blockdiagramm der ASM mit Stromspeisung resultiert Bild 4.24. Der ganze Block
für die Bestimmung der Statorspannung liegt unterhalb der gestrichelten Linie. Damit
wird deutlich, dass das Maschinenmodell einfacher wird, als bei Spannungsspeisung.
R
L
R = ------h R R i S + j p me – ------R- R dt
LR
LR
(4.71)
2
L
L
S = i S ------ + R ------h
LR
LR
(4.72)
*
*
iS
RR/LR
-
jp
+
LhRR/LR
+
Mme
R
1/s
R*
me
*
*
3pLh/LR
Im
+
1/s
1/J
-
ML
L2/LR
+
Lh/LR
+
S
RS
+
d/dt
+
uS
Bild 4.24. Blockdiagramm der ASM mit Stromspeisung in -Darstellung
4.4.2.3 Anwendungsbeispiele in statorfester-Darstellung
Mit der Raumzeiger-Darstellung im -Koordinatensystem und den Transformationen
der dreiphasigen Grössen kann das Verhalten der Asynchronmaschine jetzt sehr gut analysiert und beschrieben werden. Es lassen sich verschiedene Betriebsarten und -punkte
darstellen. Eine Auswahl davon sind:
- Hochlauf der Maschine am starren Netz
- Stern-Dreieck-Umschaltung für den Anlauf von ASM
- Ausfall einer Phase
4.4 Asynchronmaschine in Raumzeigerdarstellung
60
- Klemmen-Kurzschluss bei laufender Maschine
- Einfluss der Pulsweitenmodulation auf Strom, Fluss, Drehmoment und Drehzahl
(vor allem bei tiefer Schaltfrequenz interessant, z.B. Grundfrequenz-Steuerung)
- Sanft-Anlauf über Wechselspannungssteller.
In Bild 4.25 sind in zwei Simulationen Drehzahl, Drehmoment und der Betrag des Stromes für die gleiche Maschine dargestellt. Sie sollen an dieser Stelle als Beispiele für die
Möglichkeiten des Maschinenmodells dienen:
- Ein Stern-Dreieck-Anlauf ohne Last. Die Simulation zeigt die ausgeprägten Stromund Drehmomentspitzen im Umschaltzeitpunkt (2 s) der Statorwicklungen von Sternauf Dreieckschaltung. Wenn die Maschine nach 2.5 s die stationäre Drehzahl erreicht
hat, wird sie mit dem Nennmoment belastet.
- Ein einfacher Anlauf ohne Last mit einem anschliessenden Klemmenkurzschluss.
Auch hier sind die Strom und Drehmomentspitzen eindrücklich.
B
IB
MB
B
IB
MB
IS
M
IS
me
me
M
t
t
Bild 4.25. Simulationsbeispiele zum dynamischen Verhalten der Asynchronmaschine:
links: Stern-Anlauf, Umschaltung auf Dreieck bei 2 s; Lastzuschaltung bei 2.5 s,
rechts: Dreieck-Anlauf und Klemmenkurzschluss bei 1 s (î=6IB!)
4.4.3 ASM-Gleichungen im rotierenden Koordinatensystem
Statt dem bis dahin verwendete statorfesten -Koordinatensystem wird für viele Regelkonzepte die Beschreibung der Maschine in einem rotierenden xy-Koordinatensystem
benötigt. Ausgehend von der Beschreibung in -Koordinaten werden die Gleichungen
in das rotierende Koordinatensystem transformiert, wie in Kapitel 4.3.1.2 vorgestellt.
Werden alle Grössen der ASM-Beschreibung transformiert und in (4.53) bis (4.58) einj
gesetzt, so lassen sich die auftretenden Terme e auf beiden Seiten wegkürzen.
Für die ASM im mit K drehenden Koordinatensystem resultieren (4.73) bis (4.78).
Auf eine explizite Kennzeichnung des verwendeten Koordinatensystems wird verzichtet.
61
4 Beschreibungen von Drehfeldmaschinen
d
u S = R S i S + ----------S- + j K S
dt
(4.73)
d
u R = R R i R + -----------R + j K – p me R
dt
(4.74)
S = LS iS + Lh i R
(4.75)
R = Lh iS + L R i R
(4.76)
3p
3pL
M me = ------- Im S i S = ------- ------h Im R i S
2
2 LR
(4.77)
1
me = --- M me – M L dt
J
(4.78)
4.4.3.1 Flussorientierte Koordinatensysteme
Für hochstehende Regelungen von ASM werden Koordinatensysteme verwendet, die auf
den Fluss (das magnetische Feld) bezogen sind. Entsprechend heissen die Konzepte
Fluss- oder Feldorientierte Regelungen. Die Orientierung auf den Stator-, Haupt- oder
Rotorfluss wird üblicherweise so gemacht, dass der verwendete Flusszeiger auf der reellen Achse (x-Achse) des Koordinatesystems liegt, sein Imaginärteil wird entsprechend
null.
Im stationären Betrieb dreht das Koordinatensystem synchron mit den Klemmengrössen der Maschine: S = K . Denkt man sich einen Betrachter, der auf dem drehenden
Koordinatensystem sitzt und mitdreht, so sieht dieser im stationären Betrieb nur Gleichgrössen - eine Analogie dazu findet sich in der komplexen Wechselstromrechnung.
Dynamisch ändern die Winkel zwischen den Klemmengrössen und den Flüssen, d.h.
S K . Für die Anwendung des RZ-Modells muss in jedem Zeitpunkt die Kreisfrequenz K des Koordinatensystems bekannt sein. Sie wird üblicherweise mit Hilfe eines
Maschinenmodells bestimmt. Auf diese Modelle wird bei der Regelung von ASM genauer eingegangen. Die notwendigen Koordinatentransformationen zeigt Bild 4.26.
WinkelRechner
e-j
xU
xV
xW
3Ph
x
x
xx
xy
xy
DFMModell
ej
yx
yy
xy
y
y
yU
yV
3Ph
yW
Bild 4.26. Koordinatentransformation zwischen Klemmengrössen und xy-Beschreibung
4.5 Synchronmaschine in Raumzeigerdarstellung
62
4.5 Synchronmaschine in Raumzeigerdarstellung
Da die Synchronmaschinen auch im stationären Betrieb in einem rotierenden dq-Koordinatensystembeschrieben werden, wird mit der Beschreibung in Raumzeigerdarstellung
begonnen und erst danach der stationäre Betrieb betrachtet.
Im Statorkreis sind Asynchron- und Synchronmaschine (SM) prinzipiell identisch aufgebaut, wie in Kapitel 4.2 für die ASM beschrieben. Die Unterschiede liegen im Rotor, der
auch als Polrad bezeichnet wird: Im Gegensatz zur ASM ist sein mechanischer Aufbau
bei der SM nicht zwingend ‘rund’. Ausser Turbogeneratoren, speziellen schnellaufenden
Vollpol-SM und zum Teil Permanentmagnet erregten SM zeigen viele Maschinen unterschiedliche magnetische Eigenschaften längs und quer zur Rotor-Hauptachse (d-Achse).
Betrachtet wird einmal die allgemeinere Bauform der Synchronmaschine (SM), die
Schenkelpolmaschine in Bild 4.27 links. Die unterschiedlichen magnetischen Verhältnisse längs und quer zur Rotorachse äussern sich in der nachfolgend vorgestellten Ersatzschaltung durch unterschiedliche Längs- Ld und die Quer-Induktivitäten Lq (auch als
Längs- Xd und Querreaktanz Xq bezeichnet). Bei der Vollpolmaschine im Bild rechts sind
die magnetischen Verhältnisse in Richtung der d- und q-Achsen näherungsweise identisch. Dies wird durch die Bauform des Rotors als runder Stahlzylinder mit eingelegter
Erregerwicklung erreicht. Im Ersatzschaltbild bedeutet das, dass die Längs- (Ld) und die
Querinduktivität (Lq) identisch sind. Beide werden in diesem Fall mit Ld bezeichnete.
q
iS,V
uS,V
q
d
ErregerWicklung
iS,V
(t)
Stator
uS,W
iS,W
iS,U
uS,U
uS,V
d
ErregerWicklung
(t)
Stator
uS,W
iS,W
iS,U
uS,U
Bild 4.27. Aufbau der Synchronmaschinen: links: Schenkelpol-, rechts: Vollpolmaschine
SM-Rotoren sind so aufgebaut, dass die magnetische Flussdichte im Luftspalt näherungsweise einen harmonischen Verlauf hat (Sinus-Cosinus-Funktion). Bei drehendem
Rotor induziert dieses Feld in den Statorwicklungen Spannungen, die wiederum einen
63
4 Beschreibungen von Drehfeldmaschinen
harmonischen Verlauf haben. Die Phasenlagen dieser Spannungen sind durch die mechanische Lage des Rotors und die Drehrichtung bestimmt.
Bei den SM steht das von der Erregerwicklung erzeugt Feld bezüglich des Rotors still.
Der Rotor hat feste magnetische Nord- und Südpole. Deshalb werden Synchronmaschinen bezüglich des rotorfesten dq-Koordinatensystems dargestellt mit der Längsachse
(Polrad-Achse) d (d: direct axis) und der Querachse q (q: quadrature axis) wie das in Bild
4.28. am Beispiel einer Maschine mit einem Polpaar dargestellt ist. Das Koordinatensystem wird anschliessend so in die komplexe Zahlenebene gelegt, dass die d-Achse dem
Realteil und die q-Achse dem Imaginärteil entsprechen. (Vereinzelt wird in der älteren
Literatur die Zuordnung auch umgekehrt gemacht.)
q
iS,V
uS,V
iq
d
LqQ
iQ
Erreger- (t)
Wicklung
Stator
Polrad
uS,W
iS,U
uS,U
iS,W
q-Achse
(Im-Achse)
Lq
DämpferWicklung
Stator
LQ
iE
LE
iD
L
LED D
id
LdD
Ld
d-Achse
(Re-Achse)
LdE
Bild 4.28. Vom ‘mechanischen Aufbau’ der SM zur rotorfesten dq-Ersatzschaltung;
Indizes: d,q: Stator; D,Q: Dämpfer; E: Erreger
Das Koordinatensystem dreht bezüglich des Stators mit der Rotorfrequenz pme. Für
den Winkel zwischen- und dq-System gilt (4.79).
t = 0 + p me dt = 0 + 2p f me dt
(4.79)
Im stationären Betrieb sind so alle Grössen Gleichgrössen, analog wie bei der komplexen
Wechselstromrechnung.
4.5.1 Vollständiges Gleichungssystem
In der dq-Ersatzschaltung werden die Einflüsse der drei stillstehenden Statorwicklungen
durch zwei orthogonale ‘Wicklungen’ in d- und q-Richtung nachgebildet, die mit dem
Rotor ‘mitdrehen’. Der Stator kann dazu wie bei der ASM im ruhenden -System beschrieben und die resultierenden Gleichungen anschliessend auf das rotierende dq-System transformiert werden. Mit den Indizes d,q werden Statorgrössen gekennzeichnet, mit
4.5 Synchronmaschine in Raumzeigerdarstellung
64
E solche des Erregerkreises und mit D,Q die des Dämpferkreises. Wegen der unterschied-
lichen magnetischen Eigenschaften in d- und q-Richtung werden die Gleichungen mit
Vorteil komponentenweise angeschrieben. Der resultierende, relativ umfangreiche Gleichungssatz (4.80) bis (4.87) für die SM ist zur besseren Übersicht noch gruppiert. Auf
der Klemmenseite wird das Verbraucher-Zählsystem verwendet. (Bei Generatoren wird
teilweise auch das Erzeuger-Zählsystem verwendet.)
Stator-Spannung (4.80) und -Fluss (4.81).
d
u d = R S i d + ----------d- – p me q ;
dt
d
u q = R S i q + ----------q- + p me d
dt
q = L q i q + L qQ i Q
d = L d i d + L dE i E + L dD i D ;
(4.80)
(4.81)
Dämpfer-Spannung (4.82) und -Fluss (4.83).
d D
0 = R D i D + -----------;
dt
d Q
0 = R Q i Q + ----------dt
(4.82)
D = L dD i d + L ED i E + L D i D ;
Q = L qQ i q + L Q i Q
(4.83)
Erreger-Spannung (4.84) und -Fluss (4.85).
d E
u E = R E i E + ----------dt
(4.84)
E = L dE i d + L E i E + L ED i D
(4.85)
Drehmoment (4.86) und Drehzahl (4.87).
M me = 3------p- i q d – i d q
2
(4.86)
1
me = --- M me – M L dt
J
(4.87)
mit Ld,q, LE, LD,Q Induktivitäten von Stator-, Erreger- bzw. Dämpferwicklungen.
65
4 Beschreibungen von Drehfeldmaschinen
Kopplungsinduktivitäten zwischen den Wicklungen:
LdE
Stator - Erreger in d-Richtung
LdD
Stator - Dämpfer in d-Richtung
LED
Erreger -Dämpfer in d-Richtung
LqQ
Stator- Dämpfer in q-Richtung
RS, RE, RD,Q Stator-, Erreger- und Dämpferwiderstand
Mme, MLast Mechanisches - bzw. Last-Drehmoment
J
Massenträgheitsmoment von Rotor plus Last
p
Polpaarzahl
me
Winkelgeschwindigkeit der Welle = 2fme
Auch bei der Raumzeigerdarstellung der SM werden die Eisenverluste bei der Beschreibung vernachlässigt.
4.5.1.1 Interpretationen der Gleichungen
Die Gleichungen zeigen, dass durch die Rotation bei der Statorspannung über die Flüsse
eine Kopplung zwischen den d- und den q-Komponenten auftritt.
Die Rotorgrössen sind im dq-System keiner Drehung unterworfen. Erregerwicklung E
und Dämpferwicklung D sind transformatorisch mit den Statorwicklungen gekoppelt.
Die Dämpferwicklung in der Q-Achse ist von der Erregung vollständig entkoppelt. Damit treten bei allen Grössen, ausser den Spannungen, nur Kopplungen in der gleichen
Achse (d oder q) auf. Die Gleichungen sind in Bild 4.29. durch elektrische Schaltkreise
‘interpretiert’. Die Darstellung betont nochmals die Orthogonalität zwischen den d- und
q-Komponenten. Die Kopplung zwischen den beiden Achsen wird mittels der zwei Spannungsquellen uid und uiq symbolisiert.
LQQ
LdE
iE LEE
iD LDD
id Ldd
ud
RE
LED
RD
RS
LdD
RQ
iq
LqQ
RS
Lqq
uE
id
iQ
uq
ui,q
pmed
ui,d
-pmeq
Bild 4.29. Vollständige dq-Darstellung der SM
4.5.1.2 Einfluss der Dämpferwicklungen
Bei einigen Bauformen von SM wird der Rotor zusätzlich mit Dämpferwicklungen ausgestattet. Dies sind kurzgeschlossene Wicklungen wie bei Käfigläufer ASM. Sie haben
4.5 Synchronmaschine in Raumzeigerdarstellung
66
die Aufgabe, Pendelungen des Polrades zu dämpfen und die Verluste im Rotor, herrührend vom Statorfeld, zu reduzieren. (Vereinzelt werden solche Kurzschlussläufer-Wicklungen auch für den asynchronen Anlauf von Synchronmaschinen am Netz verwendet.)
Dämpferwicklungen werden verschieden ausgeführt: Es gibt solche mit identischem Verhalten in d- und q-Richtung und solche mit unterschiedlicher Ausprägung. Vor allem bei
Schenkelpolmaschinen muss von unterschiedlicher Ausprägung ausgegangen werden.
Dämpferwicklungen treten im stationären Betrieb nicht in Erscheinung.
Zusammenfassend gilt ohne Herleitungen:
1.Für höherfrequente Anteile in den Speisegrössen bewirken Dämpferwicklungen eine
kleinere Impedanz an den Stator-Klemmen: Wie bei einer ASM mit grossem Schlupf
fliessen die Ströme durch die Streuinduktivitäten über den Rotorkreis. Bei gegebenen
Spannungsharmonischen führt das zu erhöhten Stromharmonischen und in der Folge
zu Zusatzverlusten.
2.Bei Stromrichterspeisung mit qualitativ guten Regelungen wird die dämpfende Eigenschaft dieser Wicklung nicht benötigt. Pendelungen können durch die Regelung verhindert werden.
3.Dämpferwicklungen, zusammen mit Stromrichtern und angepasster Regelung, können
auch verwendet werden, um das dynamische Verhalten der SM weiter zu verbessern.
4.Bedingt durch den Wicklungsaufbau weisen vor allem kleinere SM im Luftspalt nicht
vernachlässigbare Feldoberwellen auf. Die Dämpferwicklung ‘schirmt’ das Polrad gegen diese ab und reduziert so die Eisenverluste im Polrad.
Die Frage, ob eine Maschine für den Betrieb am Stromrichter mit oder ohne Dämpferwicklung ausgeführt werden soll, lässt sich aus den genannten Gründen nicht allgemein
beantworten. Die exakte Bestimmung der Ersatz-Elemente der Dämpferwicklung ist aufwendig und anspruchsvoll. Dazu wird auf die weiterführende Literatur verwiesen [Fis1],
[Kle1], [Schr1], [Stu1].
4.5.2 Vereinfachte Gleichungen für die Anwendung
Um den Aufwand beim Aufstellen und Arbeiten mit den Gleichungen zu reduzieren,
werden wenn möglich Vereinfachungen gemacht. Dabei werden bevorzugt Elemente
vereinfacht beziehungsweise ganz weggelassen, die sich nur schwer bestimmen lassen.
Praktische Bedeutung haben drei Ansätze, die je nach Anspruch an die Qualität der Beschreibung einzeln oder kombiniert verwendet werden.
1. Kopplungsinduktivitäten
Die drei Kopplungsinduktivitäten in d-Richtung werden einander gleichgesetzt und
mit ‘Hauptinduktivität der d-Achse’, (z.T. Lh) bezeichnet: L dE = L dD = L ED = L h
In der gleichen Weise wird die Kopplungsinduktivität LqQ als ‘Hauptinduktivität der
q-Achse’, Lqh, bezeichnet [Kle1].
2.Dämpferwicklungen
67
4 Beschreibungen von Drehfeldmaschinen
Die Dämpferwicklungen, und damit die obigen Kopplungen, werden vollständig weggelassen.
3.Konstantes Polradfeld (konstanter Erregerstrom, Permanentmagnete)
Das Feld, verursacht durch das Polrad, wird als konstant angenommen. Dies ist sicher
bei Maschinen mit Permanentmagneten im Rotor erfüllt. Bei fremderregten Maschinen
kann der Rotorkreis meistens getrennt vom Statorkreis betrachtet werden, da Änderungen im Rotorkreis als Folge der grossen Induktivität tendenziell langsam ablaufen.
Mit der Kombination aller drei Ansätze resultiert eine reduzierte Beschreibung der SM
in der Form, wie sie verbreitet für die Auslegung von Regelungen verwendet wird.
(Eine weitere Vereinfachung bei Schenkelpolmaschinen ist das Gleichsetzen der Induktivität in q- mit derjenigen in d- Richtung. Diese Annäherung an die Vollpolmaschine
kann bei kleinen Polradwinkeln gemacht werden)
Der Beitrag zum Statorfluss durch das Polrad in (4.81) wir durch den Fluss
0 = L dE i E beschrieben und für den Statorfluss resultieren (4.89) und (4.90).
Die Gleichungen für Spannung, Drehmoment und Drehzahl können unverändert übernommen werden (4.88), (4.91), (4.92).
d
u d = R S i d + ----------d- – p me q ;
dt
d
u q = R S i q + ----------q- + p me d
dt
(4.88)
d = L d i d + 0 = L d i d + L dE i E ; q = L q i q
(4.89)
id = d –0 Ld ; iq = q Lq
(4.90)
3p
3p
M me = ------- i q d – i d q = ------- 0 i q + i d i q L d – L q
2
2
(4.91)
me = --1- M me – M L dt
J
(4.92)
Dem reduzierten Gleichungssatz entspricht die ‘elektrische Schaltung’ in Bild 4.30. Der
Erregerkreis für die Erzeugung des Flusses 0 = L dE i E ist dabei ebenfalls dargestellt.
Für Simulationen müssen die Differential-Gleichungen für die beiden Spannungskomponenten in (4.88) in Integralform umgeschrieben werden (4.93).
d = u d – R S i d + p me q dt
q = u q – R S i q – p me d dt
(4.93)
4.5 Synchronmaschine in Raumzeigerdarstellung
uq
iq
RS
68
Lqq
ui,q
pmed
LdE
iE LEE
uE
id Ldd
RE
ui,d
ud
-pmeq
Bild 4.30.
Vereinfachte dq-Darstellung der RZ-Gleichungen
RS
Mit den weiteren Gleichungen kann damit das Blockdiagramm für Spannungsspeisung
in Bild 4.31 dargestellt werden. Die Eingangsgrössen sind die Statorspannung uS, das
Lastmoment ML und der vom Polrad erzeugte Fluss 0.
0
ud
uq
RS
*
*
*
*
RS
+
+
+
-
1/s
1/s
d
q
+
1/Ld
1/Lq
id
id
iq
iq
*
*
-
*
*
+
Mme
3p/
Mme
me
+
-
1/s
1/J
p
ML
Bild 4.31. SM mit Spannungsspeisung in dq-Darstellung
4.5.2.1 SM mit Stromspeisung
SM können auch aus ‘Stromquellen’ gespeist werden. Dieses Modell wird z.B. für die
Modellierung des Stromrichter-Synchronmotors (Load Commutated Inverter Drive,
LC_Drive) verwendet, einem Antriebskonzept für höchste Leistungen. Die Statorstromkomponenten id und iq sowie der Erregerstrom iE werden der Maschine dabei von aussen
aufgeprägt. Für das Blockdiagramm werden je nach Modell noch die Ströme iD und iQ in
den Dämpferwicklungen benötigt. Sie müssen aus (4.82) und (4.83) berechnet werden.
Durch Umformungen resultieren dabei (4.94) und (4.95). Damit können die Flüsse d
und q, das Drehmoment M und die Drehzahl me bestimmt werden.
D = – R D i D dt;
Q = – R Q i Q dt
(4.94)
69
4 Beschreibungen von Drehfeldmaschinen
i D = D – L dD i d – L ED i E L D ;
1/LD
+ iD
LED/LD
-
LdD/LD
-
1/s
LdD
+
iE
LdE
+
id
Ld
+
ML
LqQ/LQ
-
1/LQ
+
(4.95)
D
-RD
iq
i Q = Q – L qQ i q L Q
d
Lq
+ q
LqQ
+
iQ -RQ
1/s
iq
*
*
+
M
M
3p/
id
*
*
-
+
-
1/s
1/J
me
Q
Bild 4.32. Blockdiagramm der RZ-Gleichungen bei Stromspeisung
In der Berechnung von Drehmoment und Drehzahl tritt die Statorspannung nicht in Erscheinung. Falls sie für die Auslegung überlagerter Regelkreise benötigt wird, so sind die
Komponenten mit Differenzieren zu erzeugen.
Bemerkung: Stromspeisung hat bei modernen Antrieben kleiner und mittlerer Leistung
wenig Bedeutung, da als Stromrichter überwiegend solche mit Spannungszwischenkreis
eingesetzt werden. Bei sehr grossen Antrieben werden sie aber weiterhin als ‚Stromrichter-Synchronmotoren‘, zusammen mit Thyristorstromrichtern eingesetzt.
4.5.2.2 Klemmengrössen - dq-Komponenten
Um die Beziehungen zwischen dem dq-Simulationsmodell und den dreiphasigen
Klemmengrössen herzustellen, muss der Winkel (t) bekannt sein, welcher die Lage des
Polrades bezüglich des Stators beschreibt.
Die einfachste Möglichkeit ist die Messung mittels eines Polrad-Lagegebers. Dafür können verschiedenste Geber oder Resolver eingesetzt werden, die an die Achse der SM
montiert werden. Da Winkelgeber aus Kosten und Zuverlässigkeitsgründen nicht beliebt
sind, wird die Winkelinformation wenn möglich aus den Klemmengrössen berechnet.
Dieser Ansatz ist aber vor allem bei kleinen Geschwindigkeiten anspruchsvoll (siehe Kapitel 6.2.1.1).
Ist (t) bestimmt, so erfolgt die Umrechnung mit den bekannten Koordinatentransformationen aus Kapitel 4.3.1.2, wie in Bild 4.33 dargestellt
4.6 Synchronmaschinen im stationären Betrieb
PolradLagegeber
e-j
xU
3Ph
xV
xW
x
x
xd
xq
DFMModell
70
ej
yd
yq
dq
dq
y
y
yU
yV
yW
3Ph
Bild 4.33. Koordinatentransformation zwischen Klemmengrössen und dq-Beschreibung
4.6 Synchronmaschinen im stationären Betrieb
Wie für Asynchron- genügen auch bei Synchronmaschinen (SM) für Anwendungen mit
mässigen dynamischen Anforderungen Beschreibungen im stationären Betrieb. Stationär
bedeute dabei, dass in dq-Darstellung alle Ableitungen der Flüsse null sind. Nach dem
Abklingen der Einschwingvorgänge sind die Ströme iD und iQ in den Dämpferkreisen
ebenfalls null. Beide Kreise können damit für die weitere Modellierung weggelassen
werden.
Für diesen Betrieb wird die SM mit einfachen Strangersatzschaltungen beschrieben.
Betrachtet werden wieder die beiden Grundbauformen der Maschine in Bild 4.27, die
Schenkelpolmaschine mit der Ersatzschaltung in Bild 4.34 links und die Vollpolmaschine
mit der Schaltung in Bild 4.34 rechts. (Ob eine Maschine als Schenkel- oder als Vollpolmaschine modelliert werden muss, ist abhängig von der Bauform und den Ansprüchen
an die Genauigkeit.)
Die beiden Ersatzschaltungen lassen sich aus direkt aus den entsprechenden Raumzeigergleichungen herleiten. Auf die exakte Herleitung wird aber an dieser Stelle verzichtet.
IS
US
RS
U S'
Uq,X =
SLdId
Ud,X =
UP
-SLqIq
IS
US
RS
US'
Ld
UP
Bild 4.34. Strang-Ersatzschaltungen der Synchronmaschinen:
links: Schenkelpol-, rechts der Vollpolmaschine
Polradspannung: Die Polradspannung UP wird vom Magnetfeld des Rotors, des Polrades, in den Wicklungen des Stators induziert. Der elektrische Winkel zwischen der
Polradspannung UP und der Klemmenspannung US wird als Polradwinkel bezeichnet.
Im stationären Betrieb eilt UP dem magnetischen Luftspaltfluss, und damit der d-Achse
des Polrades, um 90° vor; UP liegt auf der q-Achse. Mit diesem Wissen lässt sich der
Winkel der Polradspannung aus der mechanischen Lage des Polrades bestimmen. Bei
71
4 Beschreibungen von Drehfeldmaschinen
fremderregten SM ist der Betrag der Polradspannung eine Funktion des Erregerstromes:
u P = f i E . Vor allem im Bereich des Nennerregerstromes tritt wie bei der ASM Sättigung auf und die Polradspannung ändert nicht mehr proportional zum Erregerstrom.
Maschengleichungen: Im stationären Betrieb ist die Kreisfrequenz S der Speisegrössen das p-fache der mechanischen Winkelgeschwindigkeit me: S = p me . Der Betrag
der Polradspannung UP ist direkt proportional zur Drehzahl meund bei Maschinen mit
einer Erregerwicklung zum Erregerstrom IE, wenn die Sättigung des Eisens vernachlässigt wird. Für die Arbeit mit der Ersatzschaltung werden die Maschengleichungen nach
(4.96) für die Schenkelpol- und (4.97) für die Vollpolmaschine benötigt.
S
= I S R S + U d X + jU q X + jU P = I S R S – S L q I q + j S L d I d + jU
= I S R S + j X d + jU P = I S R S + j S L d + jU
S
(4.96)
(4.97)
Die Gleichungen lassen sich als Zeigerdiagramme darstellen. Für die Schenkelpolmaschine gilt dasjenige in Bild 4.35. links, für die Vollpolmaschine das im Bild rechts.
Ud
q
URS
q
URS
U
Uq,X
Uq
Bild 4.35.
Links:
Zeigerdiagramm der Schenkelpolmaschine:
U S = U d + jU q; I S = I d + jI q
UXd
Ud,X
US
US
UP
IS
UP
IS
Iq
Rechts: der Vollpolmaschine,
Mitte: Differenzspannung: U = U S – U P
Id
d
d
(Alles bei Motorbetrieb)
Für die Differenzspannung U zwischen Stator- und Polradspannung gilt ausgedrückt
durch Spannungen und Polradwinkel (4.98).
U d = – U S sin ;
U q = U S cos – U P
(4.98)
Die gleichen Teilspannungen lassen sich auch durch den Statorstrom ausdrücken (4.99).
U d = I d R S – I q S L q ; U q = I q R S + I d S L d
(4.99)
4.6 Synchronmaschinen im stationären Betrieb
72
Aus (4.98) und (4.99) lassen sich die Stromkomponenten in Funktion von Strang- und
Polradspannung, sowie des Polradwinkels ausdrücken (4.100). Diese Darstellung wird
z.B. für die Analyse der SM am Netz benötigt. (Im Falle einer Vollpolmaschine können
die beiden Impedanzen Xd und Xq gleich gesetzt werden.)
U q X – U S R S sin – U S X q cos + U P X q
I d = ------------= ----------------------------------------------------------------------------------------------------2
Xd
R –X X
S
d
q
(4.100)
U d X
I q = ------------- = U S sin – I d R S X q
Xq
Ausgedrückt durch die Komponenten von Strom und Klemmenspannung gilt ohne mechanische Verluste für Leistung und Drehmoment (4.101).
2
2
P me = M me me = 3 U d I d + U q I q – R S I d + I q
U d = – U S sin ;
(4.101)
U q = U S cos
Bei Vernachlässigung der ohmschen und mechanischen Verluste lassen sich aus (4.101)
und (4.100) in handlicher Form Leistung oder Drehmoment angeben (4.102). Der zweite
Term in der Klammer zeigt, dass bei unterschiedliche Längs- und Querinduktivitäten
auch ohne Polradspannung ein Drehmoment erzeugt wird, das Reaktions- oder Reluktanzmoment. Diese fehlt entsprechend bei einer Vollpolmaschine (4.103).
US 1
UP
1- sin 2
P me = M me me = 3U S ------------ sin + --------- ------ – ----
L L
L
2
S d
S
q
d
(4.102)
3U S U
P me = M me me = ------------------P- sin
S Ld
(4.103)
Neben dem Reaktionsmoment lässt sich aus der Gleichung noch eine weitere wichtige
Eigenschaft ableiten: Ausgehend von Null ist das Drehmoment näherungsweise proportional zum Polradwinkel , analog wie bei einer Feder. Zusammen mit einer Schwungmasse kann so ein schwingfähiges System entstehen. Dies ist die Ursache des sogenannten Pendelns bei SM. Anregungen können elektrische und mechanische Drehmomentstösse sein.
Bild 4.36 zeigt als Beispiel das Drehmoment und den Statorstrom einer SchenkelpolSM. Der Betrag der Polradspannung ist gleich der Statorspannung gewählt, was bei einem Polradwinkel von zuStrom Null führt. Der Statorwiderstand ist vernachlässigt.
73
4 Beschreibungen von Drehfeldmaschinen
IS
M
Mb
Ib
M()
IS()
(Gen.)
(Mot.)
(Gen.)
(rad)
(Mot.)
(rad)
Bild 4.36. Links: Bezogenes Drehmoment der SM M= f(): rot: Schenkelpol, lila Vollpol
rechts: Bezogener Statorstrom IS= f(): rot: Schenkelpol, lila Vollpol
4.7 Anspeisung von DFM
Für die Transformator-Ersatzschaltung und die Raumzeigerdarstellung der DFM werden
die Spannungen über und die Ströme in den Wicklungen (Strängen) benötigt. Für die
Gültigkeit der Maschinenbeschreibung in der vorgestellten Form wurde vorausgesetzt,
dass in der Maschine keine Gleichtaktkomponenten (Nullkomponenten) auftreten.
Gleichtaktkomponenten sind Anteile, die in allen 3 Phasen identisch verlaufen, d.h.
auch phasengleich sind. Jedes Tripel von Spannungen und Strömen lässt sich aufspalten
in gleichtaktfreie Anteile, deren Summe null ist, und den gemeinsamen Gleichtaktanteil.
Für die Mittelpunktspannungen u U 0 , u V 0 , u W 0 in den Prinzipschaltungen nach Bild 4.37
und Bild 4.38 sind dies die gleichtaktfreien u' U 0 , u' V 0 , u' W 0 in (4.104) zusammen mit der
Gleichtaktkomponente uG wie in (4.105) angeschrieben.
u' U 0 + u' V 0 + u' W 0 = 0
u U 0 = u' U 0 + u G ;
(4.104)
u V 0 = u' V 0 + u G ;
u W 0 = u' W 0 + u G
(4.105)
Maschinenaufbau, Schaltung des Stators: Es wird vorausgesetzt, dass die Statoren von
DFM symmetrisch aufgebaut sind. D.h. die drei Wicklungssysteme sind identisch und je
um 2/3 gegeneinander versetzt. Die Widerstände und Streuinduktivitäten sind in allen
drei Wicklungen gleich und die drei durch den Rotorkreis induzierten Spannungen bilden
ein symmetrisches Spannungssystem.
In Realität ist die Voraussetzung des vollständig symmetrischen Aufbaus praktisch
kaum je erfüllt. Das führt dazu, dass im Maschineninnern in geringem Mass Gleichtaktkomponenten auftreten. Diese werden aber vernachlässigt!
4.7 Anspeisung von DFM
74
Die Statorwicklungen von DFM können bekanntlich in Dreieck oder Stern geschaltet
werden. Beide Varianten werden betrachtet:
Dreieckschaltung: Wie Bild 4.37 zeigt, sind bei Dreieckschaltung die Spannungen über
den Wicklungs-Strängen eindeutig definiert. Am Beispiel eines Stranges gilt entsprechend (4.106).
uU0
iU
uWU
uV0
uUV
0
uW0
uVW
Quelle (Stromrichter)
Z
eU
Z
eV
Z
eW
iV
iW
Bezeichnungen:
uU0, uV0, uW0 Mittelpunktspannungen
uUV, uVW, uWU Phasenspannungen
iU, iV, iW
eU, eV, eW
Phasenströme
Gegenspannungen
Z
RStrang+LStrang
Last (Maschine)
Bild 4.37. Dreiphasige Quelle mit einer Last in Dreieckschaltung
u UV = u U 0 – u V 0 = u' U 0 + u G – u' V 0 + u G = u' U 0 – u' V 0
(4.106)
Bemerkungen:
- Ohne irgendwelche Anforderungen an den Aufbau der Stränge fallen die Gleichtaktkomponenten in den Mittelpunktspannungen in den Strangspannungen der Maschine
immer weg.
- Die Strangströme stellen sich abhängig von den Strang-Impedanzen, den verketteten
Spannungen und den induzierten Spannungen ein.
- Bei in Dreieck geschalteten Lasten können Kreisströme in den Strängen auftreten. Diese Ströme werden durch vom Rotor induzierte Spannungsharmonische verursacht. Sie
belasten die Maschine und sind deshalb unerwünscht.
- Bei Dreieckschaltung können in den Zuleitungsströmen keine Gleichtaktkomponenten
auftreten.
Standardmaschinen für Netzanschluss werden üblicherweise so gefertigt, dass sie bei
Nennspannung in Dreieck geschaltet sind. Damit ist dann bei Asynchronmaschinen ein
Stern-Dreieck-Anlauf möglich.
Sternschaltung:
75
4 Beschreibungen von Drehfeldmaschinen
Wird der Sternpunkt (N) in Bild 4.38 nicht mit dem Spannungsnullpunkt (0) verbunden,
so ist die Summe der drei Ströme, und folglich auch deren Ableitungen, gleich null. Entsprechend werden die Summen der ohmschen und induktiven Spannungsabfälle null; die
drei induzierten Spannungen sind es per Definition.
uU0
iU
uV0
iV
0
uW0
uU
uUV
uVW
iW
0
Quelle (Stromrichter)
uWU
uN0
N
Z
uV
Z
uW
Z
eU
eV
eW
Bezeichnungen:
uU0, uV0, uW0 Mittelpunktspannungen
N
uN0
iU, iV, iW
eU, eV, eW
Phasenspannungen
Sternpunktspannung
Phasenströme
Gegenspannungen
Z
RStrang+LStrang
uU, uV, uW
Last (Maschine)
Bild 4.38. Dreiphasige Quelle mit einer Last in Sternschaltung
Für die drei Maschen, die uN0 enthalten gilt (4.107). Einsetzen von u U + u V + u W = 0
und Auflösen nach uN0 ergibt (4.108).
uU 0 = uU + u N 0 ,
uV 0 = uV + u N 0 ,
1
u N 0 = --- u U 0 + u V 0 + u W 0
3
uW 0 = uW + u N 0
(4.107)
(4.108)
Einsetzen von (4.105) in (4.108) ergibt schliesslich u N 0 = u G . Für eine symmetrische
Last in Sternschaltung gilt somit:
- Werden der Mittelpunkt der Quelle und der Sternpunkt der Last nicht verbunden, so
sind die Lastspannungen immer gleichtaktfrei. Eine Gleichtaktkomponente in der
Quellenspannung fällt als Sternpunktspannung ab.
- Sind die Quellenspannungen bekannt, so können jederzeit die drei Strangspannungen
bestimmt werden.
- Bei Sternschaltung können keine Kreisströme in den Strängen auftreten. Maschinen für
Stromrichteranwendungen werden deshalb bevorzugt in Sternschaltung ausgelegt.
Nutzen von Gleichtaktanteilen:
Die Eigenschaft, dass Gleichtaktanteile in den Quellengrössen in der Last nicht mehr auftreten, wird bei verschiedenen Steuerverfahren für Stromrichter gezielt ausgenutzt; sie
stellt einen zusätzlichen Freiheitsgrad für die Generierung von Pulsmustern dar.
4.7 Anspeisung von DFM
76
Spezielle Gleichtaktkomponenten sind harmonische Schwingungen mit der Amplitude
AG und einer Frequenz der Form 31 (3. Harmonische und deren Vielfache, bzw. DCKomponente). Die resultierenden Beiträge sind in allen drei Phasen gleich:
u G = A G cos 3 1 t ,
= 0 1 2
A G cos 3 1 t = A G cos 3 1 t – 2
------ = A G cos 3 1 t – 4
------
3
3
(4.109)
(4.110)
77
5 Stromrichter und Frequenzumrichter
5 Stromrichter und Frequenzumrichter
Für die Anspeisung von Drehfeldmaschinen werden Wechselspannungen und -ströme
variabler Frequenz und Amplitude benötigt. Diese lassen sich mit grosser Flexibilität und
Dynamik mit Stromrichtern (SR) erzeugen. Stromrichter-Kombinationen, bei denen am
Ein- und Ausgang Wechselgrössen auftreten, werden als Frequenzumrichter oder -umformer (FU) bezeichnet. Fast alle Bauformen benutzen eine Gleich-Zwischengrösse zur
Erzeugung der verlangten Ausgangsgrössen. Die Gleichgrösse selbst wird üblicherweise
aus dem ein- oder dreiphasigen Netz erzeugt. Die Grundstruktur eines FUs zeigt Bild 5.1.
fN
netzseitiger
Stromrichter
Netzseite: uN, iN, PN, QN
Bild 5.1.
DC
Energiespeicher
DC
Zwischenkreis: ud, id, Pd
lastseitiger
Stromrichter
fL
Lastseite: uL, iL, PL, QL
Prinzipieller Aufbau eines Frequenzumrichters
Drehzahlvariable Antriebe können grundsätzlich mit verschiedensten Bauformen von
Stromrichtern ausgeführt werden. Die Auswahl der Schaltungen wird stark durch die verfügbaren Leistungshalbleiter bestimmt. Lange waren abschaltbare Leistungshalbleiter
für grössere Leistungen entweder gar nicht verfügbar, unzuverlässig oder zu teuer. Während Jahrzehnten waren Thyristoren die einzigen steuerbaren Elemente für mittlere und
grössere Leistungen. Mit diesen wurden überwiegend Schaltungen mit Stromzwischenkreis realisiert (Bild 5.2 links). Die bekanntesten Bauformen sind die ein- oder dreiphasigen Thyristorbrücken, mit denen aus dem Wechselspannungsnetz ein (kurzzeitig konstanter) Gleichstrom im Zwischenkreis erzeugt wird. Die Spannung im Zwischenkreis
kann dabei positiv oder negativ sein, abhängig von der Flussrichtung der Energie. Für
grosse und grösste Leistungen werden so seit vielen Jahren Stromrichter-Synchronmotoren gebaut. Sie können in allen vier Quadranten der Drehmoment-Drehzahl-Ebene betrieben werden.
Mit steigender Leistungsfähigkeit der ein- und ausschaltbaren Leistungshalbleiter wurden immer mehr Stromrichter mit Spannungszwischenkreis (U-Umrichter) ausgeführt.
Die Zwischenkreisspannung hat nur eine Polarität, der Wert wird meistens konstant gehalten. Frequenzumrichter für Drehstromantriebe kleiner und mittlerer Leistung werden
heute praktisch ausschliesslich in dieser Art realisiert. Deshalb werden nachfolgend
Schaltungen betrachtet, die im Zusammenhang mit U-Umrichtern verwendet werden.
Mit abschaltbaren Halbleitern können auch Stromrichter mit Stromzwischenkreis gebaut werden. Die Schaltungen und die notwendigen Eigenschaften der Leistungshalblei-
5.1 Leistungshalbleiter für SR mit Spannungszwischenkreis
ud,N
Bild 5.2.
id konst.
Stromud,L Zwischenkreis
(I-Umrichter)
id,N
id,L
ud konst.
78
SpannungsZwischenkreis
(U-Umrichter)
Zwischenkreis bei I- und U-Umrichtern
ter sind dual zu denjenigen bei Spannungszwischenkreis. Diese Stromrichter werden bis
heute nur sehr begrenzt eingesetzt. [Eic1], [Hin1], [Jen2].
5.1 Leistungshalbleiter für SR mit Spannungszwischenkreis
Die Schlüsselelemente eines Stromrichters sind die Leistungshalbleiter (LE-HL), welche
als schnelle statische Schalter eingesetzt werden. Für die Modellierung der SR wird vor
allem ihr prinzipielles Verhalten benötigt, wie es anschliessend kurz zusammengestellt
ist. Auf das spezifische Verhalten der verschiedenen Elemente wird nicht weiter eingegangen, da dieses bei jeder neuen Generation des gleichen HL-Typs leicht ändert.
In selbstgeführten SR werden die Schaltzeitpunkte der Elemente durch ihre Ansteuersignale bestimmt. Im Gegensatz dazu sind bei fremdgeführten Schaltungen die Schaltzeitpunkte der Halbleiter durch den Schaltungsaufbau und die Speisegrössen bestimmt.
5.1.1 Ideale Schaltelemente
Bild 5.3 zeigt die drei in Stromrichtern mit Spannungszwischenkreis praktisch auftretenden Halbleiter- ‚Funktionen‘ als Schaltsymbole und ihre idealisierten Kennlinien:
a) Rückwärts leitende, über den Steueranschluss ein- und ausschaltbare Schalter:
Feldeffekt-Transistoren (MOS-FET), Insulated-Gate-Bipolar-Transistoren (IGBT)
und Gate-Turn-Off -Thyristoren (GTO), alle mit einer antiparallelen Diode.
b) Rückwärts sperrende, über die Steuerung nur einschaltbare Schalter: Thyristoren.
c) Nicht steuerbare ‚Ventile‘: Dioden.
Die idealisierte Betrachtung bedeutet, dass der Spannungsabfall im leitenden Zustand
und der Leckstrom im sperrenden Zustand als null angenommen werden.
Die ein- und ausschaltbaren Schalter werden über ein logisches Schaltsignal s gesteuert: Der Wert s=1 bezeichnet den eingeschalteten und s=0 den ausgeschalteten Zustand.
Das Schaltsignal s(t) in Funktion der Zeit wird als Schaltfunktion bezeichnet. In selbstgeführten Schaltungen müssen die Schaltelemente die Fähigkeit besitzen, den Strom auf
Befehl in Vorwärtsrichtung (iS > 0) abschalten zu können.
Thyristoren können über den Steueranschluss nur eingeschaltet werden. Zum Ausschalten muss der Strom durch den Lastkreis wieder auf null gezwungen werden.
79
5 Stromrichter und Frequenzumrichter
a)
iS
b)
iS
uS
s
c)
iD
uS
uD
s
iS
iS
s=1
iD
s=1
s=0
uS
uS
Schalter
rückwärts leitend
ein- und ausschaltbar
uD
Thyristor
rückwärts sperrend
nur einschaltbar
Diode
nicht schaltbar
Bild 5.3.
Idealisierte
Leistungshalbleiter
Funktionen
Die idealisierte Betrachtung beinhaltet im weiteren, dass die Übergänge zwischen dem
ein- und dem ausgeschalteten Zustand, wie in Bild 5.4 links dargestellt, ohne Verzögerung und mit unendlich steilen Schaltflanken ausgeführt werden können. Der Schalter ist
damit gänzlich verlustlos, sowohl in bezug auf Leit- wie auch auf Schaltverluste. Die ‚realen‘ Schaltverläufe rechts im Bild illustrieren die gemachten Vernachlässigungen. Dargestellt sind die verzögerte Reaktion auf die Schaltbefehle td, die endlichen Schaltzeiten
tEin und tAus, sowie der Spannungsabfall über dem leitenden Element. Die endlichen
Schaltzeiten führen zu Schaltverlusten und die Spannungsabfälle zu Leitverlusten im
Halbleiter.
s
1
s
1
0
u, i
uS
Aus
t
u, i
iS
Ein
pV
Aus
t
uS
td,Ein+tEin
iS
Aus
pV
Ein
PEin
PLeit
idealisierte Halbleiter
Bild 5.4.
t
Ein- und Ausschalten von Leistungshalbleitern
td,Aus+tAus t
reale Halbleiter
Aus
PAus
t
pV(t)=uSiS
t
5.1 Leistungshalbleiter für SR mit Spannungszwischenkreis
80
5.1.2 Dioden
Dioden sind in ihrer Funktion die einfachsten Halbleiter. In langsamen Anwendungen,
wie zum Beispiel in Netzgleichrichtern, bereiten sie kaum Schwierigkeiten, wenn sie
spannungs- und strommässig richtig dimensioniert, genügend gekühlt und mit einer kleinen RC-Beschaltung (Bild 5.6) zum Schutz vor Überspannungen versehen werden.
iF
iF
du
uF
uF0
Bild 5.5.
uF0
di
uF
rF
uF
iF
Dioden: Schaltsymbol, Näherung für die Durchlasskennlinie, Ersatzschaltung
Für die Berechnung der Verluste wird von Bild 5.5 ausgegangen. Die mittlere Verlustleistung in der Diode berechnet sich gemäss (5.1).
T
PV
1 u t i t dt
= --F
T F
0
T
1 2
= --- i F t r F + U F 0 i F t dt
T
0
T
T
0
2
r F I eff
0
(5.1)
1 2
1
= r F --- i F t dt + U F 0 --- i F t dt
T
T
=
+ U F0Id
(Ieff: Effektivwert und Id: linearer Mittelwert.)
Bei sehr grossen di/dt (Stromänderungen), wie das bei Freilaufdioden in Stromrichtern
auftritt, ist das Verhalten der Dioden aber wesentlich komplexer. Es können Rückwärtsströme auftreten, die eine Grössenordnung erreichen, denen die Dioden längerfristig
nicht gewachsen sind. Freilaufdioden müssen deshalb entsprechend den effektiven Belastungen sorgfältig ausgesucht werden.
Die dabei zu beachtenden Kenngrössen sind die Speicherladung Qrr, die Sperrverzugszeit trr und der Rückwärtsstrom irr. Es gelten die folgenden Abhängigkeiten:
- Die abzuführende gespeicherte Ladung Qrr nimmt mit grösser werdendem Vorwärtsstrom zu, da mehr Ladungsträger im Halbleiter gespeichert sind.
81
5 Stromrichter und Frequenzumrichter
- Bei gegebener Ladung nimmt der Rückwärtsstrom irr mit steigendem di/dt zu;
trr nimmt dabei leicht ab.
Für diese Zusammenhänge gelten die Näherungsformeln (5.2) (Annahme: Gleichschenkliges Dreieck mit der Höhe irr):
di t rr
i rr ----- ----dt 2
2
t rr
di t rr
Q rr i rr ----- = ----- ----2
dt 4
und
(5.2)
Die Zuleitungsinduktivität L kann im Bereich des Scheitelwertes des Rückwärtsstromes
über der Diode grosse Spannungsspitzen verursachen, da die Stromänderung dort sehr
gross wird. Um diese Überspannungen zu begrenzen, werden Dioden bei Bedarf mit einem Kondensator C und einem Widerstand R beschaltet: Bild 5.6. Die Dimensionierung
erfolgt dabei gleich wie in Kapitel 5.2.3 für einen Brückenzweig hergeleitet.
iD, uD
di/dt
iF
R
trr
C
L
uF
irr
Qrr
t
iD
uD
upk
Bild 5.6.
Rückwärtsstrom, Speicherladung und RC-Beschaltung
Silizium-Karbid-Schottky Dioden (Silicon Carbide Schottky, SiC): SiC-Dioden haben eine leicht tiefere Durchlassspannung als Si-Dioden. Was sie aber vor allem auszeichnet ist das fast völlige Fehlen der Speicherladung Qrr. Damit sinken die Schaltverluste und es lassen sich wesentlich schnellere Schaltungen realisieren. SiC-Dioden sind
aber wesentlich teurer als Si-Dioden und zur Zeit nur bis zu mittleren Spannungen und
Strömen erhältlich.
5.1.3 Ein- und ausschaltbare Leistungshalbleiter
Tabelle 5.1 beschreibt die drei wichtigsten abschaltbaren Halbleitertypen. In Bild 5.7
sind ihre Einsatzbereiche bezüglich der beiden wichtigsten Parameter, Nennleistung des
SRs und Schaltfrequenz, dargestellt. Dazu ist anzumerken, dass die Leistungshalbleiter
einer ständigen Entwicklung unterliegen und die Grenzdaten schnell ändern können.
Es ist ersichtlich, dass sich die Bereiche unterscheiden: Der MOS-FET als schnellstes
Element ist geeignet für hohe Schaltfrequenzen bis über 1MHz. Er ist aber nur in Strom-
5.1 Leistungshalbleiter für SR mit Spannungszwischenkreis
82
Tabelle 5.1. Abschaltbare Leistungshalbleiter
typische
Grenzdaten
Schaltsymbol
D
G
S
MOSFET
Feldeffekttransistor
C
G
E
IGBT, Insulated Gate
Bipolar Transistor
A
K
G
GTO, IGCT
Gate-Turn-Off Thyristor
VA
108
Schaltverzögerungen
td,Ein; td,Aus
Leitspanminimale
nungsPulsweite
abfall
Aufwand für
Beschaltung und
Ansteuerung
uDS=1000V
iD=30A
oder
uDS=50V
iD=300A
0.05...0.5s
0.5...s
1...10V
(1% von
uDS,max)
klein
uCE=4500V
(...6500V)
iC=2000A
(...3000A)
0.4...1.2s
2...5s
2...4V
klein
10...40s
50...20s
2...3V
sehr gross
(bei IGCT schon
integriert)
uAK=4500V
(...6500V)
iA=2000A
Nennleistung des Stromrichters
GTO
IGCT
106
IGBT
104
Schalt-
MOS-FET
102
101
102
103
104
105
frequenz
106
Hz
Bild 5.7.
Einsatzbereiche von abschaltbaren Halbleitern in konventionellen, dreiphasigen Stromrichtern
richtern bis zu einigen kVA Leistung und eher niedriger Spannung einsetzbar. Der verhältnismässig langsame GTO kommt in Anlagen sehr grosser Leistung zum Zuge, darf
dafür aber nur mit wenigen 100Hz geschaltet werden. (GTOs mit integrierter Gate-Ansteuerung, die IGCT, sind schneller, aber noch immer langsamer als die IGBTs.) Der
IGBT liegt in Bezug auf beide Parameter zwischen MOS-FET und GTO. Mit seinem erweiterten Arbeitsbereich (Safe Operating Area, SOA) hat er laufend grössere Anwendungsbereiche übernommen.
83
5 Stromrichter und Frequenzumrichter
Die zulässige Schaltfrequenz für die Halbleiter spielt eine zentrale Rolle. Sie beeinflusst massgeblich, wie gut die Kurvenformen der Spannungen und Ströme am Stromrichter ihren idealen Sollwerten angenähert werden können.
Zukünftig werden bis in den tiefen kW-Bereich Gallium-Nitrid (GaN) und bis in den
mittleren kW-Bereich Silizium Karbid (SiC) Transistoren zum Einsatz kommen. Diese
ermöglichen aufgrund der kleineren Durchlasswiderstände und den praktisch vernachlässigbaren Speicherladungen höhere Leistungsdichten und Schaltfrequenzen. Von den Materialien her wären auch höhere Kristalltemperaturen möglich. Zuverlässigkeit und Preis
verzögern aber die Einführung der grundsätzlich schon sehr lange bekannten Elemente.
Ausnutzen der Halbleiterdaten: Die angegebenen Maximalwerte von Strom und Spannung der Leistungshalbleiter werden in der Praxis bei den Nennwerten, die im Stromrichter auftreten, nur zu etwa 50% ausgenutzt. Damit stehen Spannungsreserve bei Überspannungen und Stromreserve bei Überstrom zur Verfügung.
5.2 Ansteuerung und Schutz von spannungsgesteuerten Halbleitern
5.2.1 Ansteuerung von IGBT und FET
IGBT und FET werden über die Gatespannung uGE gesteuert. Sie benötigen nur während
den Schaltvorgängen einen kurzzeitigen Strom iG um die Gatekapazitäten CGE und CCG
umzuladen. Der Verlauf der Eingangsspannung ist bei beiden Elementen identisch. Zum
Ausschalten genügt es, beim FET die Gatespannung auf null zu schalten (U2 = 0), während beim IGBT im ausgeschalteten Zustand bevorzugt eine negative Gatespannung (U2
< 0) angelegt wird, um die Spannungsfestigkeit zu erhöhen.
Die notwendigen Gatesignale lassen sich mit einer Schaltung nach Bild 5.8 erzeugen.
Der integrierte Teil der Schaltung (Ansteuer-IC) ist in verschiedensten Formen und von
verschiedenen Herstellern erhältlich. Er enthält typischerweise die folgenden Funktionen:
- Überwachung der Betriebspannung des IC‘s, U1 und U2.
- Überwachung der Pulsbreite (vor allem die minimale Pulsbreite) tEin und tAus.
- Überwachung des Stromes iC durch den Leistungshalbleiter (typischerweise in Form
einer Messung des Spannungsabfalls uCE über dem Element)
- Eventuell eine Überwachung der Strom- / Spannungsanstiegsgeschwindigkeiten diC/dt
und duCE/dt.
- Blockieren von erneutem Einschalten nach einem Fehler für eine vorgegebene Zeitspanne.
- Rückmeldung eines Fehlers an die übergeordnete Steuerung (eher selten)
- Temperaturüberwachung von Ansteuerung und/ oder Halbleiter (eher selten).
5.2 Ansteuerung und Schutz von spannungsgesteuerten Halbleitern
uCE
FehlerRückmeldug
iC
CCG
U1
Ansteuer &
RG1
T1
+iG
iG
Schutzlogik
T2
U2
C
G
uCE
-iG
RG2
Ein/Aus
CGE
iG
uGE
uGE
iG
Ansteuer-IC
Ein
Bild 5.8.
84
uGE
E
Aus
t
Ansteuerschaltung für IGBT (und, ohne negative Spannung FET)
- ...
Mit den beiden externen Widerständen RG1 und RG2 im Gatepfad kann die Ein- und Ausschaltgeschwindigkeit des Halbleiters bei Bedarf reduziert werden. Viele Ansteuer-IC
sind aber nur für einen einzigen Gate-Widerstand ausgelegt.
Es gibt auch integrierte Ansteuerungen, welche die Möglichkeit zur Begrenzung der
Strom- und Spannungsanstiegs-Geschwindigkeit als Funktion enthalten (‚Regelung‘).
Bei Ansteuerungen auf Potential müssen die Speisung des Ansteuer-IC‘s und das Einschaltsignal galvanisch getrennt auf die Ansteuerung gebracht werden. Dazu werden optisch und magnetische ‚Isolationen‘ (Optokoppler, Lichtleiter, Transformatoren...) oder
‚level-shifter‘ eingesetzt.
Ansteuerleistung:
Die Ansteuerverluste sind normalerweise so klein, dass sie für die Erwärmungsbetrachtung des Halbleiters vernachlässigt werden können. Der Leistungsbedarf wird aber für
die Speisung der Ansteuerung benötigt.
Bei feldgesteuerten Halbleitern ist die Ansteuerleistung durch die Ladung und die
Spannung am Gate bestimmt. Die Ladung, die pro Schaltvorgang in das Gate hineinfliesst, wird üblicherweise in den Datenblättern angegeben. Für die Energie WG pro Einund Ausschaltvorgang gilt damit (5.3). Um die Leistung PG zu erhalten, muss die Energie
noch mit der Schaltfrequenz fS multipliziert werden.
85
5 Stromrichter und Frequenzumrichter
W G = u G0 i G dt = u G0 i G dt = u G0 Q G
(5.3)
PG = f S W G
Die Gleichung kann mit einer Skizze gemäss Bild 5.9 illustriert werden. CG repräsentiert
dabei die Summe von Gate-Emitter- und Gate-Kollektor- Kapazität mit ‚Miller-Effekt‘.
RG
iG
G
C
E
uG0
CG
Bild 5.9.
Gatekreis für die Berechnung der
Ansteuerleistung
5.2.2 Überspannungs- und Überstromschutz
Leistungshalbleiter sind sehr empfindlich auf Überspannung und empfindlich auf Überstrom. Im Normalfall werden sie gegen beide Belastungen zweistufig geschützt: Einmal,
indem mittels Regelungen gewährleistet wird, dass die in der Schaltung auftretenden
Spannungen und Ströme die zulässigen Grenzen nicht überschreiten (Zwischenkreisspannung Kapitel 5.4.3.3, Laststrom Kapitel 5.7). Diese Regelkreise haben Zeitkonstanten im Millisekunden bis Sekundenbereich. Eine zweite, schnelle Schutzstufe wird direkt
am Leistungshalbleiter eingesetzt:
Überspannungsschutz direkt am Halbleiter
Durch das sehr schnelle Schalten der Halbleiter werden durch parasitäre Zuleitungsinduktivitäten Überspannungen erzeugt. Gegen diese Spannungen müssen die Halbleiter
geschützt werden. In der Vergangenheit wurden dazu verschiedenste Beschaltungen verwendet. Einige davon sind heute noch bei GTO und IGCT anzutreffen. (Bei diesen Elementen muss zusätzlich die Steilheit des Stromes beim Einschalten und die Steilheit des
Spannungsanstiegs beim Ausschalten begrenzt werden (di/dt und du/dt-Entlastung).)
IGBT und FET sind bezüglich der Anstiegsteilheit von Strom und Spannung robust.
Deshalb hat sich die Anwendung von einfachen RC-Gliedern ‚Snubber‘ direkt über den
einzelnen Halbleitern durchgesetzt. Diese verlangsamen den Spannungsanstieg etwas
und begrenzen die Überspannung. Die exakte Auslegung der RC-Glieder ist nicht einfach und soll deshalb anschliessend genauer betrachtet werden.
Schneller Überstromschutz direkt am Halbleiter
Der Strom durch den Halbleiter wird überwacht. Beim Überschreiten einer vorgegebenen
Schwelle wird sofort abgeschaltet. Die Reaktionszeit ist dabei im Bereich von wenigen
Mikrosekunden. Bei feldgesteuerten Halbleitern ist es üblich, den Strom im Halbleiter
5.2 Ansteuerung und Schutz von spannungsgesteuerten Halbleitern
86
anhand der Sättigungsspannung (uCE, uDS) zu überwachen: Steigt die Spannung am eingeschalteten Element zu hoch an, so wird sofort ausgeschaltet. Die Funktion ist in den
meisten käuflichen Ansteuerungen so implementiert. Vereinzelt werden auch Strommesswiderstände (‚shunts‘) eingesetzt.
5.2.3 RC-Glieder (Snubber) als Schutz in einem Brückenzweig
Von einem dreiphasigen Stromrichter wird ein vollständiger Brückenzweig mit Zwischenkreis und Laststrom gemäss Bild 5.10 betrachtet. Ausgehend vom effektiven Auf-
L1
LC
LA/2
S+
ud/2
Cd
LM/2
Cd
LM/2
CS+
ud
ud/2
LC
Zwischenkreis
LA/2
iL
CSS-
LA/2
RS+
RS-
LL
iL
RS+
uS+
ud/2
LM/2
CS+
iS+
LM/2
iSCS-
ud/2
LA/2
S-
uS-
RS-
Modul
Bild 5.10. Modellierung des Stromrichters für die Snubber-Auslegung.
bau im Bild links wird das Modell für einen Schaltvorgang im Bild rechts erstellt:
- Die Speisung des Zwischenkreises über die Induktivität L1 entspricht einer Stromquelle und kann für sehr schnelle Vorgänge weggelassen werden.
- Der oder die Zwischenkreiskondensatoren Cd sind Spannungsquellen und können als
solche modelliert werden (zweimal ud/2).
- Die Serieinduktivitäten LC der Kondensatoren können zu den Aufbau- Induktivitäten
LA zugeschlagen werden.
- Die Induktivitäten LM der Module werden in das vereinfachte Modell übernommen.
- Die Lastinduktivität LL hält den Strom iL während des Schaltvorganges konstant. Sie
kann durch eine Stromquelle iL ersetzt werden.
Betrachtet wird das Öffnen des unteren Schalters S- im Brückenzweig. Im Sinne einer
‚worst case‘- Betrachtung wird zum Einen angesetzt, dass er sehr schnell ausschaltet und
zum Anderen, dass die Energie in der Induktivität des Modulaufbaus (LM/2) vom Schalter aufgenommen wird. (Diese Annahme ist in sich widersprüchlich: Damit die Energie
87
5 Stromrichter und Frequenzumrichter
aufgenommen werden kann, ohne das zu grosse Überspannungen entstehen, darf nicht
beliebig schnell geschaltet werden.)
- Der Strom iL fliesst im ersten Moment nur in das untere RC-Glied: iS-= iL. Die Spannung über dem Schalter S- springt damit auf den Wert uS- = iLRS- und der untere Kondensator CS- wird mit iL geladen.
- Die ansteigende Spannung über dem Schalter S- leitet die Entladung des oberen RCGliedes über LA/2 in den Zwischenkreis ein.
- Die Umschwingvorgänge dauern an, bis die Spannung am oberen Schalter S+ null ist,
und die Diode zu leiten beginnt.
Eine geschlossene analytische Berechnung der Vorgänge wird anspruchsvoll. Es stellt
sich die Frage nach einer vereinfachten Lösung, deren Resultate dann bei Bedarf mittels
Simulation überprüft werden können.
Das betrachtete Netzwerk nach Bild 5.10 wird dazu weiter vereinfacht zu Bild 5.11: Im
Pfad des oberen Schalters werden alle Induktivitäten und das RC-Netzwerk vernachlässigt (Ansatz: Die Einflüsse kompensieren sich in etwa).
ud/2
iL
ud/2
LA/2
iSCSRS-
uS-
ud
LA/2
iSCS-
uS-
RS-
Bild 5.11. Vereinfachungen für die Snubber-Auslegung.
Beim Ausschalten des Schalters S- fliesst der Strom iL durch RS- und CS- bis die Diode
des oberen Schalters S+ bei US- = Ud leitet. (Bei konstantem Strom ist der Spannungsabfall über der Induktivität LA/2 null.) Leitet die Diode, so bilden das RC-Glied und die
Aufbauinduktivität einen RLC-Kreis mit der Anfangsbedingung: uCS = ud (Widerstand
vernachlässigt) und iS- = iL. Wiederum unter Vernachlässigung des Widerstandes RSkann über die Energiebilanz die maximale Spannung am Kondensator (entsprechend der
Spannung über dem Schalter), beziehungsweise der Wert des Kondensators bei gegebener Maximalspannung, berechnet werden (5.4). Die maximale Spannung am Schalter ist
eine bestimmende Grösse!
5.2 Ansteuerung und Schutz von spannungsgesteuerten Halbleitern
2
2
88
2
C S û S - C S u d L A 2 i L
-------------- = ------------- + ----------------------2
2
2
2
2 LA 2 2
û S - = u d + ------------------i
CS L
(5.4)
Als nächstes muss nun der Widerstand RS berechnet werden. Damit der Spannungsabfall
darüber nicht zu gross wird, ist ein kleiner Wert anzustreben. Der Widerstand bestimmt
auch die Dämpfung im RLC-System. Über eine Impedanzbetrachtung des RLC-Seriekreises lässt sich der Wert für eine gewünschte Dämpfung bestimmen (5.5).
2
Z = 1 – LC + jRC jC ; res = 1 LC;
(5.5)
Damit keine Resonanzüberhöhung auftritt, muss bei der Resonanzfrequenz (2LC = 1)
gleichzeitig RC = 1 gelten (5.6). Der Widerstand R muss also grösser oder gleich der
Wurzel aus L/C (Wellenwiderstand) gewählt werden.
RC
------------ = 1
LC
R LC
(5.6)
Verluste im RC-Glied:
Über einen Lade- Entlade- Zyklus eines RC-Gliedes fällt im Widerstand R die Energie
WR an. Multipliziert mit der Schaltfrequenz fS erhält man die Leistung PR im Widerstand
(5.7).
ˆ 2
W R = Cu C
ˆ 2
P R = f S Cu C
(5.7)
Praxis:
In der Praxis muss nun ein Kompromiss zwischen Spannungsüberhöhung und Verlusten
im Widerstand gefunden werden. Ein realistischer Wert für die Spannungsüberhöhung
bei Nennstrom ist etwa 20% der Zwischenkreisspannung.
Das Hauptproblem ist in den meisten Fällen die Bestimmung der Aufbau-Induktivität
LA. Um eine Grössenordnung zu finden, kann die Induktivität von 2 parallelen Drähten
einen Hinweis geben: Zwei Drähte im Abstand von 10 cm und einem Durchmesser von
6 mm ergeben ca. 150 nH/m. Wichtige Anteile der Induktivität tragen auch die Module
selbst und die Kondensatoren bei.
Oft wird zur teilweisen Kompensation der Zuleitungsinduktivität direkt am Leistungshalbleiter (Modul) nochmals ein ‚Zwischenkreis‘-Kondensator zugeschaltet. Dabei können aber Resonanzen zwischen den verschiedenen Kondensatoren auftreten.
89
5 Stromrichter und Frequenzumrichter
5.3 Verluste und Kühlung von Leistungshalbleitern
Bei Leistungshalbleitern treten Ansteuer-, Sperr-, Leit-, Schalt- und Beschaltungsverluste auf. Die entstehende Wärme im Halbleiter muss abgeführt werden. Die Wärmeabfuhr
ist sehr wichtig, da sie im Wesentlichen die Belastbarkeit des Halbleiters bestimmt. Die
Siliziumscheiben in den Halbleitern dürfen jen nach Element nur Maximaltemperaturen
im Bereich von 125...175°C erreichen. Wird die zulässige Temperatur überschritten,
funktionieren die Elemente nicht mehr richtig und werden in der Folge zerstört.
5.3.1 Verlustbestimmung
Bei spannungsgesteuerten Halbleitern treten im Element praktisch keine Ansteuerverluste auf. Auch die Verluste in einer eventuellen RC-Schutzbeschaltung erwärmen den
Halbleiter nicht direkt.
Sperrverluste
Diese sind im Normalfall vernachlässigbar. Bei kritischer thermischer Auslegung des
Halbleiters sollten sie aber überprüft werden. Dabei ist vor allem zu beachten, dass die
Sperrströme iS proportional zur Temperatur ansteigen! Für die Sperrverluste gilt allgemein (5.8):
T
1
P V = --- u t i S t dt
T
(5.8)
0
Leitverluste
Leitverluste sind bei den meisten Halbleitern die dominanten Verluste. Sie werden mittels einfachen Modellen bestimmt:
Bei bipolaren Halbleitern (Dioden, Transistoren, Thyristoren, GTOs, IGBTs) kann
die Durchlasskennlinie durch eine Spannungsquelle und einen differentiellen Widerstand
approximiert werden, wie dies auch bei Dioden gemacht wird. Die Ersatzschaltung ist in
Bild 5.12. wiedergegeben. Zu beachten ist dabei, dass je nach Stromflussrichtung entweder die Ersatzelemente für den IGBT oder für die Diode verwendet werden müssen.
Die mittlere Leit- Verlustleistung berechnet sich gemäss (5.9) aus dem Effektivwert Ieff
und dem linearen Mittelwert Id von iF.
2
P L = U F 0 I d + r F I eff
(5.9)
5.3 Verluste und Kühlung von Leistungshalbleitern
uF,I
uF0,I
rF,I
90
iF,I
iF,D
rF,D
Bild 5.12.
Ersatzschaltung für die Bestimmung der
Leitverluste: Index I: IGBT, D: Diode
uF0,D
uF,D
Für die Modellierung der Leitverluste von Feldeffekttransistoren genügt der ohmsche
Widerstand rds(on). Zu beachten ist dabei, dass rds(on) sehr stark temperaturabhängig ist
(5.10)
2
P L = r ds on I eff
(5.10)
Schaltverluste:
Schaltverluste sind direkt proportional zur Schaltfrequenz. Bei abschaltbaren Halbleitern
können sie, vor allem bei höheren Frequenzen, die Leitverluste übertreffen. Die exakte
Bestimmung der Schaltverluste ist schwierig, da Strom und Spannungsverläufe beim
Schalten meist nicht genau bekannt sind. Ein vereinfachtes Modell gemäss Bild 5.13 erlaubt aber eine vernünftige Abschätzung. Der folgende Ansatz wird gemacht:
- Innerhalb von tF falle die eine Grösse vom Maximalwert X auf null ab.
- In der gleichen Zeit steige die zweite Grösse von null auf den Wert Y an.
u(t), i(t)
X
Y
tF
t
Bild 5.13.
Modell für die Berechnung der
Schaltverluste
Mit diesem Ansatz erhält man die Verlustenergie pro Schaltvorgang WS und die Schaltverlustleistung PS (Ein- und Ausschalten berücksichtigen) bei der Frequenz f:
91
5 Stromrichter und Frequenzumrichter
tf
WS =
Y
X
- t X – ----- t dt
---tF
tF
0
(5.11)
XY t F
W S = ------------6
P S = W S Ein + W S Aus
Die Berechnung der Schaltverluste wird massiv vereinfacht, wenn vom Hersteller Angaben über die Verluste erhältlich sind. Angegeben werden oft die Energien in Funktion des
Laststromes, der Spannung und zum Teil noch der Gate-Ansteuerung, pro Ein- und Ausschaltvorgang. Bei ändernder Spannung bzw. Strom können die Verluste in etwa linear
skaliert werden, wie das auch aus (5.11) ersichtlich ist.
5.3.2 Erwärmung von Halbleitern
Zur Abfuhr der anfallenden Verluste werden die Halbleiter auf Kühlkörper montiert. Diese führen die Wärme an die Umgebung ab. Übliche Kühlarten sind:
-
Luftkühlung mit freier Luftzirkulation
Luftkühlung mit forcierter Luftzirkulation
Ölkühlung
Wasserkühlung
Heat-Pipes
etc.
Für die Temperaturbetrachtungen bei Halbleitern werden Modelle aus der Elektrotechnik
verwendet. Damit lassen sich Temperatur, Wärmefluss und Wärmekapazität sehr einfach
modellieren. In Bild 5.14 sind am Beispiel eines schematischen Leistungshalbleiters mit
Kühlkörper die wichtigsten thermischen Widerstände und Wärmekapazitäten skizziert.
Die Verluste im Halbleiterkristall selbst stellen die Wärmequelle mit der Leistung PV dar.
Der Wärmefluss geht vom Kristall über Gehäuse (Modul) und Kühlkörper auf die Umgebung.
In der Ersatzschaltung sind (x: Englische Bezeichnungen):
- (v)J:
- G:
- K:
- U:
(Virtuelle) Sperrschichttemperatur
Gehäusetemperatur des Halbleiters
Kühlkörpertemperatur
Umgebungstemperatur
(j: junction)
(c: case)
(h: heatsink)
(a: ambient)
- RthJG: Übergangswiderstand Kristall-Gehäuse.
5.3 Verluste und Kühlung von Leistungshalbleitern
HalbleiterKristall
G K
Gehäuse,
Kühlkörper
Modul
U
Umgebung
J
J
Rth,JG
G
Rth,GK
K
92
Rth,KU
PV
Cth,J
Halbleiter
Gehäuse,
(Wärmequelle)
Cth,G
Kühlkörper
Cth,K
U
Umgebung
Bild 5.14. Thermische Ersatzschaltung eines Halbleiters mit Kühlkörper
Ist im Halbleiterdatenblatt angegeben (th: thermal).
- RthGK: Übergang vom Gehäuse auf den Kühlkörper.
Dieser Wert ist von der Montage- und Oberflächenqualität abhängig.
Er muss durch den Anwender möglichst klein gehalten werden.
(Feinbearbeitung der Oberflächen, Wärmeleitpaste etc.).
- RthKU: Übergang vom Kühlkörper auf die Umgebung.
Dieser Wert ist dem Datenblatt des Kühlkörpers zu entnehmen.
Temperaturberechnung:
Über dem thermischen Widerstand Rth fällt bei Wärmefluss PV eine Temperatur ab.
Es gilt analog zur Elektrotechnik (5.12):
= R th P V
[] = K; [Rth] = K/W; [PV] = W
(5.12)
Für die Temperatur über einer Wärmekapazität Cth gilt (5.13):
1
= -------- P V dt
C th
[Cth] = Ws/K
(5.13)
Mit den eingeführten Analogien lässt sich jetzt wie mit elektrischen Grössen rechnen.
Kristalltemperatur im stationären Betrieb:
Im stationären Betrieb können die Wärmekapazitäten vernachlässigt werden. Die Kristalltemperatur berechnet sich direkt aus den thermischen Widerständen (5.14).
J = P V R th JG + R th GK + R th KU + U
(5.14)
93
5 Stromrichter und Frequenzumrichter
Einige typische Werte für die thermischen Widerstände bei verschiedenen Baugrössen
von Leistungshalbleitern zeigt die Tabelle 5.2:
Gehäusebauform
(Zellen)
Dauerstrom
Wärmewiderstand
RthJG
RthGUbei
Luftselbstkühlung
Luft,
forciert
Wasserkühlung
A
K/W
K/W
K/W
K/W
Schraubg.
6..30
2.5..0.8
5.5..1.2
2.0..0.4
0.1...
Module
30..400
0.6..0.3
0.6...0.4
0.2..0.10
0.07..0.02
Scheiben
200..1000
0.1..0.04
0.5..0.25
0.2..0.08
0.04..0.01
Tabelle 5.2. Typische Werte für thermische Übergangswiderstände
Kristalltemperatur im dynamischen Betrieb:
Sind die einzelnen Wärmekapazitäten bekannt, lässt sich die Temperatur analog wie bei
RC-Schaltungen berechnen. Normalerweise ist aber die Bestimmung der Wärmekapazitäten relativ schwierig, und auch die Berechnungen wären aufwendig. Beide Probleme
werden mit Hilfe des transienten thermischen Widerstandes Zth(t) umgangen. Dies sind
aus dynamischen Temperaturmessungen hergeleitete Widerstandswerte in Funktion der
Zeit wie in Bild 48 skizziert. Die Temperaturerhöhung bis zum Zeitpunkt T beschreibt
(5.15).
= Z th T P V
[Zth] = K/W
(5.15)
mit Kühlkörper
Zth
Kühlung nicht
relevant
nur Chip-Gehäuse
mitGeh = konst.
10-3
10-2
10-1
1
10
t
Bild 5.15.
Transienter Wärmewiderstand
Die Kurve in Bild 5.15 zeigt sehr schön, dass bei kurzzeitiger Belastung der Halbleiter
mehr Verlustenergie aufnehmen kann als im Dauerbetrieb, da ein Teil der Wärme in der
Masse von Halbleiter und Kühlkörper gespeichert werden kann. Der transiente Wärme-
5.3 Verluste und Kühlung von Leistungshalbleitern
94
widerstand Zth für sehr grosse Zeiten entspricht dem thermischen Widerstand im stationären Betrieb.
Für grössere Leistungshalbleiter wird die Kurve des transienten Wärmewiderstandes
vom Hersteller abgegeben.
PV
PV2
PV1
t
PV
P2
P1
t
P11
P22
(t)
1
2
11
22
t
Bild 5.16.
Temperaturbestimmung bei Impulsbetrieb
Temperaturbestimmung bei Impulsbetrieb:
Bei Belastung des Halbleiters mit einzelnen Stromimpulsen lässt sich die Temperatur ebenfalls mittels des transienten Wärmewiderstandes bestimmen, wie in Bild 5.16 illustirert. Vorgehen:
a) Die Verlustleistungen PVi werden als Überlagerung von positiven und negativen 'Leistungsschritten' dargestellt.
b) Für jeden dieser 'Leistungschritte' kann mit Hilfe des transienten Wärmewiderstandes
der Temperaturverlauf bestimmt werden. Der transiente Wärmewiderstand wird dazu
mit linearer Zeitachse dargestellt. Die positiven und negativen Temperaturverläufe, die
sich durch die einzelnen 'Leistungsschritte' ergeben, werden addiert. Die Summe ergibt
den resultierenden Temperaturverlauf (t).
95
5 Stromrichter und Frequenzumrichter
5.4 Stromrichter-Bauformen
Ein Teil der Anforderungen an die Stromrichter und deren Bauform sind für die Netzund für die Maschinenseite unterschiedlich. Deshalb werden die beiden Seiten getrennt
betrachtet.
5.4.1 Anforderungen auf der Netzseite
Bild 5.17 zeigt den netzseitigen Teil des Frequenzumrichters. In der Regel ist der Leistungsfluss im Zwischenkreis durch die Last bestimmt, so dass dem netzseitigen Stromrichter die Aufgabe zukommt, diese Leistung aus dem Netz zu beziehen oder ins Netz
einzuspeisen. Als Regelgrösse wird dabei nicht die Leistung selbst, sondern der Mittelwert der Spannung ud im Zwischenkreis verwendet. Sie wird auf einen vorgegebenen
Wert geregelt, der konstant oder abhängig vom Betriebspunkt des lastseitigen Stromrichters sein kann. Im Netz sind Frequenz und Spannung näherungsweise konstant.
Netz
fN, uN, iN, PN, QN
netzseitiger u , i , P
d d d Bild 5.17.
Stromrichter
Netzseite des Frequenzumrichters
Anforderungen an den Netz-Strom und die -Leistungen:
1. Der Netzstrom soll möglichst sinusförmig sein, damit überwiegend Grundschwingungsleistung fliesst. Unter der Annahme, dass die Netzspannung selbst ebenfalls
weitgehend sinusförmig ist, verursachen alle von der Grundschwingung verschiedenen
Anteile im Strom Verzerrungsblindleistung und sind deshalb unerwünscht.
2. In der Regel soll die mit dem Netz ausgetauschte Blindleistung minimal sein. Dazu
muss die Grundschwingung des Stromes möglichst dieselbe Phasenlage wie die Netzspannung aufweisen. Eine Ausnahme bildet der spezielle Fall, dass der netzseitige
Stromrichter nebenbei noch die Funktion eines Blindleistungskompensators für das
Netz übernehmen muss.
3. Die Amplitude der Grundschwingung des Phasenstromes soll so eingestellt sein, dass
die benötigte Leistung aus dem Netz bezogen wird.
5.4.2 Schaltungen für die Netzseite
Die vorgehend beschriebenen Anforderungen werden einerseits durch die Auswahl von
geeigneten Stromrichterschaltungen und andererseits durch eine angepasste Steuerung
und Regelung erreicht. Wesentlich ist dabei die Unterscheidung von ungesteuerten und
5.4 Stromrichter-Bauformen
96
fremdgeführten Stromrichtern auf der einen Seite und von selbstgeführten Stromrichtern
auf der anderen.
Die besprochenen Schaltungen sind jeweils die Grundausführungen einer ganzen Klasse von Schaltungen, welche alle ähnliche Eigenschaften zeigen. Ein Beispiel dafür ist der
sogenannte 6-pulsige Gleichrichter (Schaltung 1 in Tabelle 5.3). Zwei bzw. vier derartige
Gleichrichter lassen sich zusammen mit den entsprechenden Transformatoren in bekannter Weise zu einer 12- bzw. 24-pulsigen Schaltung erweitern. Diese erweiterten Varianten
zeigen zwar ein verbessertes, vom Prinzip her aber gleichartiges Verhalten.
Tabelle 5.3 zeigt die vier Grundausführungen eines netzseitigen Stromrichters für einen
Spannungszwischenkreis zusammen mit Hinweisen auf ihre wesentlichen Eigenschaften. Die schwarz ausgezogenen Teile in den Schemata sind die einphasigen Schaltungen
und die grauen Teile sind die Ergänzungen zu den entsprechenden dreiphasigen Ausführungen. Die Schaltungen 1 bis 3 sind fremd- bzw. netzgeführt, die Schaltung 4 ist selbstgeführt. Sie unterscheiden sich ganz wesentlich in Bezug auf Aufwand und Eigenschaften, wobei mit aufsteigender Nummer der Schaltung der Aufwand steigt, dafür aber die
Eigenschaften besser werden.
Für alle Schaltungen gilt, dass bei Vernachlässigung des Wirkungsgrades die Wirkleistung durch die Lastseite gegeben ist:
Schaltung 1: Näherungsweise ergeben die ungesteuerten Gleichrichterbrücken eine konstante Gleichspannung, die dem Spitzenwert ûN der Eingangsspannung entspricht (bei
dreiphasigen Schaltungen dem Spitzenwert der verketteten Spannungen). Der Netzstrom besteht aus kurzen hohen Pulsen, was eine grosse Verzerrungsblindleistung zur
Folge hat. Die Stromform lässt sich mit Hilfe der gestrichelt eingezeichneten Glättungsdrossel verbessern, sie wird aber bestenfalls rechteckförmig. Die aufgenommene
Grundschwingungsblindleistung (QN) ist sehr klein, da die Stromgrundschwingung in
jedem Betriebsfall näherungsweise in Phase mit der Netzspannung ist. Eine Rückspeisung von Energie ins Netz ist nicht möglich.
Für grosse Leistungen sollte die Schaltung immer mit einer Zwischenkreis und/ oder
mit Netzdrosseln ausgerüstet werden.
Schaltung 2: Gesteuerte Gleichrichter können im Gegensatz zu ungesteuerten nur mit der
Glättungsdrossel im Zwischenkreis betrieben werden. Die Netzströme sind idealisiert
ebenfalls rechteckförmig. Mit Hilfe des Steuerwinkels lässt sich der Mittelwert der
Zwischenkreisspannung Ud von null bis zum Maximalwert stetig variieren. Das Verhältnis von Wirk- zu Blindleistung im Netz ist ebenfalls durch den Steuerwinkel bestimmt. Die entsprechende Ortskurve ist ein Viertelkreis, d.h. die Blindleistung ist stets
induktiv. Der Radius des Viertelkreises ist durch die Amplitude des Zwischenkreisstromes gegeben, die sich lastabhängig einstellt. Da die Zwischenkreisspannung beim UUmrichter nicht negativ werden soll, bleibt das Problem der Energierückspeisung bei
dieser Schaltung bestehen.
97
5 Stromrichter und Frequenzumrichter
Tabelle 5.3. Schaltungen für den netzseitigen Stromrichter mit Spannungszwischenkreis
Schaltung
Ud
iN
einphasig
1)
iN
t
ud R
d
dreiphasig
Grundschwingungs
Leistungen
QN
konstant,
ûN
PN
t
2)
QN
einphasig
iN
t
ud
Rd
dreiphasig
variabel,
~cos
ûN
PN
t
3)
1
QN
einphasig
iN
t
dreiphasig
2
ud
variabel,
~cos
ûN
2
1
PN
t
4)
QN
iN
ud
t
variabel,
ûN
PN
Schaltung 3: Umkehrgleichrichter verhalten sich grundsätzlich gleich wie die Schaltungen 2. Durch Hinzufügen eines entgegengesetzt gepolten gesteuerten Gleichrichters
wird jedoch die Umkehr der Energieflussrichtung möglich. Je nach Vorzeichen des benötigten Laststromes ist eine der beiden Thyristorbrücken aktiv. Die Ortskurve wird
auf einen Halbkreis erweitert, wobei die Blindleistung weiterhin stets induktiv ist. Diese Schaltungen sind geeignet für Anwendungen, welche häufig und viel Energie ins
Netz zurückspeisen.
Schaltung 4: Selbstgeführte Stromrichter, als aufwendigste der vier Grundschaltungen,
erlauben einerseits eine gute Annäherung des Netzstromes an die Sinusform und andererseits eine flexible Steuerung der Blindleistung. Für den Leistungsfluss sind bei entsprechender Steuerung beide Richtungen möglich. Die Blindleistung kann auf einen
5.4 Stromrichter-Bauformen
98
beliebigen Wert eingestellt werden. Die Beschränkung auf den dargestellten Kreis ergibt sich daraus, dass der Stromrichter-Strom auf einen Maximalwert begrenzt ist. In
der Regel wird die Blindleistung auf null gehalten. Damit die beliebige Vorgabe von
Wirk- und Blindleistung möglich ist, muss allerdings die Zwischenkreisspannung immer leicht grösser sein als der Spitzenwert der Netzspannung.
Die Auswahl der geeigneten Schaltung für eine bestimmte Anwendung erfolgt aufgrund
der spezifischen Anforderungen an den netzseitigen Stromrichter: Regelbarkeit der Zwischenkreisspannung, Kurvenform des Netzstromes, netzseitige Blindleistung sowie Fähigkeit zur Umkehr der Energieflussrichtung.
Aus Kostengründen wird stets eine möglichst einfache Schaltung eingesetzt. Die
‚Standardschaltungen‘ waren in der Vergangenheit meistens ungesteuerte Diodenbrücken: Unterhalb etwa eines kW einphasige darüber bis über 100kW 3-phasige Brücken.
Mit den immer strenger werdenen Netzvorschriften (z.B. EN 61000-3-2 und -12) sind
Diodenbrücken ohne zusätzliche Massnahmen zum Teil nicht mehr zulässig. Eine erste
Verbesserung bringen passive Filter (LC-Filter). Bei einphasigen Schaltungen können
auch Gleichrichter mit Hochsetzstellern zum Einsatz kommen (Leistungsfaktor-Korrektur, power factor control, PFC).
5.4.3 Ein- und dreiphasige Diodenbrücken
Die vollständige Struktur von ungesteuerten Gleichrichtern für die nachfolgenden Betrachtungen zeigt Bild 5.18: Auf der Gleichspannungsseite enthalten die Gleichrichter
praktisch immer einen Kondensator Cd um die Welligkeit der Gleichspannung zu begrenzen, d.h. um die Spannung möglichst konstant zu halten. Die Impedanzen ZN symbolisieren Netz- und Transformatorimpedanzen. Sie können auch Teil eines eventuellen
Filters sein, dass eingefügt wird, um die Netzrückwirkungen der Schaltung zu begrenzen.
iGR
Ladeschaltung
ZN
iN
Netz
uUV
uWU
uVW
Ld
CD
RD
uGR
Cd
iL
iC
ud
Bild 5.18. Allgemeine Struktur ungesteuerter Gleichrichter
Um die Amplituden der Netzströme und die Welligkeit der Zwischenkreisspannung zu
verkleinern, wird bei grösseren Gleichrichtern oft noch die Drossel Ld eingesetzt. In diesem Falle wird die angedeutete RC-Beschaltung der Diodenbrücke notwendig, welche
99
5 Stromrichter und Frequenzumrichter
die Spannungsspitzen begrenzt, die beim Kommutieren durch die Rückwärtsströme der
Dioden (iRR) auftreten.
Bei grösseren Leistungen kann der Gleichrichter nicht mehr direkt an das Netz zugeschaltet werden: Die Ströme zum erstmaligen Aufladen des Zwischenkreis-Kondensators würden zu gross. Dem wird mit einem zweistufigen Einschalten abgeholfen: Während einer begrenzten Zeit wird der Gleichrichter über Vorwiderstände an das Netz geschaltet; für den Dauerbetrieb werden diese anschliessend überbrückt. Diese Funktion ist
in Bild 5.18 mit der ‘Ladeschaltung’ symbolisiert.
Neben der dargestellten sind noch andere Arten von Ladeschaltungen in Gebrauch: Statt
drei Widerständen auf der Netzseite kann auch ein Widerstand im Zwischenkreis eingesetzt werden. Eine andere Möglichkeit ist der Einsatz von zusätzlichen Spannungsquellen in Form eines kleinen Transformators mit Gleichrichter zur Aufladung des Zwischenkreises.
Die Netzstromverläufe bei einfachen Diodengleichrichtern sind relativ unglücklich.
Bei kleinen Netzimpedanzen, dies ist meist der Fall, werden die Stromleitdauern kurz
und entsprechend die Stromspitzen hoch. Dies ergibt im Netz störende Netzharmonische,
die zwar kaum Grundschwingungs-, dafür aber Verzerrungsblindleistung erzeugen.
Nach Möglichkeit wird zugunsten von Kosten und Aufwand auf Schaltungszusätze
verzichtet. Bei den ‚Einfachst-Gleichrichtern‘, bestehend nur aus Diodenbrücke und
Kondensator, treten aber die grössten Strombelastungen auf. Auch die Spannungswelligkeit am Kondensator wird maximal. Die Eigenschaften von solchen Gleichrichtern zeigt
für den ein- und den dreiphasigen Fall Bild 5.19. Die Netzimpedanzen sind kleiner als
0.2% der Bezugs-Impedanz (Un/In) und im Zwischenkreis ist keine Glättungsinduktivität
eingesetzt.
ûN
Id
iN
iN
ûN
Id
uN
ud
ud
iC
iC
uU,ph
1t/2
Bild 5.19. Ströme und Spannungen bei Diodengleichrichtern bei harter Speisung:
links: einphasiger GR, rechts: dreiphasiger GR
1t/2
5.4 Stromrichter-Bauformen 100
5.4.3.1 Näherungen für die Berechnungen
Die exakte Berechnung von Strömen und Spannungen in der vollständigen Gleichrichterschaltung in Bild 5.18 ist analytisch nicht handhabbar. Es sollen aber Näherungen für
die praktische Verwendung vorgestellt werden. Dazu wird von der vereinfachten Schaltung in Bild 5.20 ausgegangen.
DU+ DV+ DW+
U
uWU V
W
iGR
iN
uUV
ud
uVW
iC
Cd
DU- DV- DW-
iL
Bild 5.20.
Diodengleichrichter mit kapazitiver Glättung
und Konstantstrom-Last als Modell für die Berechnungen
Für die erste Betrachtung der Zwischenkreisspannungen sei der Kondensator Cd
nicht vorhanden und der Laststrom iL konstant. Es leiten immer die zwei Dioden, an denen auf der Netzseite die grösste Spannung anliegt: Eine in der oberen und eine in der
unteren Brückenhälfte. Netz- und Zwischenkreis-Spannungen sind für den ein- und den
dreiphasigen Fall in Bild 5.21 dargestellt. Der im Bild angedeutete leichte Versatz nach
unten der Gleichspannung ud tritt auch in der Realität durch den Spannungsabfall über
den Dioden auf. Für den resultierenden Gleichspannungsmittelwert Ud bei idealen Dioden gilt bei der einphasigen Brücke (5.16) und bei der dreiphasigen (5.17).
û
ud
Ud
û
Ud
ud
uUV
uVW
DU+
DU+/DV-
DU-/DV+
uUV
1t/2
DV-
uWU
DW+
DV+
DW-
DU-
1t/2
Bild 5.21. Spannungen vor- und nach dem Gleichrichter mit den jeweils leitenden Dioden
(ud ist zur Illustration leicht nach unten versetzt):
links: beim einphasigen Gleichrichter, rechts: für den dreiphasigen Fall
101 5 Stromrichter und Frequenzumrichter
1
2
2 2
U d = --- û sin d = û --- = U eff ---------- = 0 900U eff
(5.16)
0
3
U d = --
2 3
3
3
3 2
û sin d = û --- = U eff ---------- = 1 35U eff
(5.17)
Bei normal dimensionierten Glättungskondensatoren kann bei Dreiphasenbrücken der
Gleichspannungsmittelwert in etwa als Gleichspannung bei Nennlast angenommen werden. Bei einphasigen Schaltungen muss der Kondensator grösser gewählt werden und die
Betriebsspannung wird etwas höher. Im Leerlauf funktionieren die Schaltungen als
Spitzenwert-Gleichrichter, d.h. es muss mit dem Spitzenwert der jeweiligen Gleichrichter-Eingangsspannungen gerechnet werden. Am 230V/400V Netz gilt für die Zwischenkreisspannungen etwa:
- Einphasenbrücke: û d = 230V 2 325V ; effektiv U d 300V
- Dreiphasenbrücke:û d = 400V 2 566V ; effektiv U d 540V
Die Gleichspannungen sind belastungsabhängig. Rechnet man noch Netzspannungsschwankungen und Rückspeisungen von der Last her dazu, so können beide Werte noch
weiter streuen. Dies ist bei der nötigen Spannungsfestigkeit der Bauelemente zu berücksichtigen. Dem Mittelwert ist eine Welligkeit überlagert: Bei zweipulsigen Schaltungen
hat sie die doppelte, bei sechspulsigen Schaltungen die 6-facher Netzfrequenz.
5.4.3.2 Dioden- und Kondensatorströme
Die Dioden- und die Kondensatorströme setzen sich aus verschiedenen Zeitfunktionen
zusammen. Für die näherungsweise Berechnung der Dioden-und Kondensatorbelastung
können sie durch rechteckförmige Verläufe ersetzt werden. Bei der einphasigen Brücke
leitet jede Diode einmal pro Periode, der Kondensator wird mit zwei Stromstössen nachgeladen. Dagegen leitet jede Diode in der dreiphasigen Brücke zweimal und der Zwischenkreiskondensator wird mit 6 Pulsen nachgeladen, wie in Bild 5.22 dargestellt.
Für die genaue Dimensionierung der Dioden werden die Strommittel- und die Effektivwerte benötigt (Kapitel 5.1.2). Der Zwischenkreiskondensator muss auf den Stromeffektivwert dimensioniert werden. Für die Ströme gelten die Ausdrücke in Tabelle 5.4.
t E' = t E T ist dabei die auf die Periodendauer T der Netzspannung bezogene virtuelle
Leitdauer der einzelnen Dioden. Für die virtuelle Pulsbreite tE' gilt bei einer Speisung aus
einem harten Netz ohne nennenswerte Glättungsinduktivitäten (5.18). In diesem Betriebsfall wird die Leitdauer vor allem durch die Zwischenkreiskapazität bestimmt. Die
noch vorhandenen Induktivitäten runden die Verläufe nur wenig aus. (5.18) zusammen
mit Tabelle 5.4 zeigen auf, dass bei sehr kleinen Induktivitäten und grösser werdendem
Glättungskondensator, bei ansonsten gleichen Daten, die Stromeffektivwerte steigen,
5.4 Stromrichter-Bauformen 102
T
tE
i(t)
i(t)
i(t)
tE
i(t)
t
Netzstrom
t
Diodenstrom
Kondensatort
strom
T
t
i(t)
t
i(t)
t
Bild 5.22. Idealisierte Stromformen der Diodengleichrichter mit rein kapazitiver Glättung:
links: 2-pulsige Brücke, rechts: 6-pulsige Brücke,
gestrichelt: zum Vergleich mit idealer induktiver Glättung im Zwischenkreis
was zu einer stärkeren Belastung der Elemente führt. Der vorliegende Betriebsfall kann
in den meisten Fällen als schlechtester Fall für die Belastung der Elemente angenommen
werden.
Wird eine grosse Zwischenkreisdrossel eingesetzt, so steigt der Wert von tE' bis zum
Maximalwert: Bei der Einphasenbrücke 1/2 und bei der dreiphasigen Brücke 1/6 (die beiden Einzelpulse verschmelzen dabei zu einem Puls mit der Gesamtleitdauer T/3). In diesem Fall ergeben sich die gestrichelt gezeichneten idealen rechteckförmigen Stromverläufe. Die Zwischenkreiskapazität hat dabei keinen Einfluss mehr auf die Leitdauer.
IL
1
t E' --------------- ------------- ;
p N û N C d
p: Pulsigkeit der Schaltung: 2 oder 6
û N : Scheitelwert der Netzspannung
(5.18)
Tabelle 5.4. Strombelastung von Dioden und Zwischenkreiskondensator
Element
Grösse
2-pulsig
6-pulsig
Netz
Ieff
I L 2 1 t E'
I L 3 1 t E'
Diode
Id
IL 2
IL 3
Diode
Ieff
I L 2 1 t E'
I L 3 1 2t E'
Kondensator
Ieff
I L 1 2t E' – 1
I L 1 6t E' – 1
Verlustabschätzung: Für eine noch einfache Schätzung kann pro HL ein mittlerer Spannungsabfall von 2...2.5V einfach mit dem Strommittelwert multipliziert werden.
5.4.3.3 Begrenzung der Zwischenkreisspannung
Damit die Zwischenkreisspannung beim Energiefluss aus dem Antrieb nicht zu hoch ansteigt, wird oft noch ein so genannter ‚Bremswiderstand‘ Rd eingesetzt. Dieser wird mit-
103 5 Stromrichter und Frequenzumrichter
tels Pulsweitenmodulation so über den Zwischenkreis geschaltet, dass die Spannung
nicht zu hoch ansteigen kann. Die Struktur dieser ‚Standardschaltung‘ und die damit einhergehende idealisierte Ersatzschaltung für die weiteren Betrachtungen zeigt Bild 5.23.
Die Kombination hält, bei richtiger Auslegung, die Zwischenkreisspannung immer innerhalb des für die Funktion notwendigen Spannungsbereiches.
iN
ud/2
Rd
ud/2
uN
ud/2
Anst.
Netzfilter
Ladeschaltung
ud/2
Spannungsbegrenzung
Bild 5.23. Links: Standard-Dioden-Gleichrichterschaltung mit ‚Bremswiderstand‘,
rechts: Spannungsquellen-Ersatzschaltung für die weiteren Betrachtungen
5.4.4 Anforderungen auf der Maschinenseite
Mit Hilfe eines Stromrichters nach Bild 5.24, der eine freie Einstellung der Statorgrössen
ermöglicht, sollen Drehfeldmaschinen flexibel angespeist werden.
Stator
ud, id, Pd lastseitiger
Stromrichter
Rotor
fS, uS, iS, PS, QS
me
Bild 5.24.
Umrichtergespeiste
Drehfeldmaschine
Für eine Kurzschlussläufer-ASM und eine Synchronmaschine sind in Bild 5.25 die
charakteristischen statischen Drehmoment-Drehzahl Kennlinienfelder dargestellt. Dabei
dient die am Stator eingespeiste Frequenz fS bzw. die KreisfrequenzS als Kurvenparameter. Mit der frei einstellbaren Statorfrequenz lässt sich ein beliebiger Betriebspunkt innerhalb der gekennzeichneten Flächen einstellen.
Im gesamten Grunddrehzahlbereich (|me| me,n) wird mit vollem Fluss gefahren, so
dass sich motorisch und generatorisch stets das maximale Drehmoment erreichen lässt.
Für Drehzahlen oberhalb der Nenndrehzahl muss der Fluss reduziert werden, da die Statorspannung höchstens der maximal verfügbare Stromrichterspannung entsprechen kann.
Dabei tritt in der Maschine Feldschwächung auf. Das erreichbare Drehmoment nimmt im
Feldschwächbereich proportional zum Fluss ab. Bild 5.26 zeigt die für beide Maschinentypen gültige typische Spannungs-Frequenz-Kennlinie und den zugehörigen Verlauf der
Stator-Flussverkettung S.
5.4 Stromrichter-Bauformen 104
M
S=me
P
M
S=me
P
me
me
R
Bild 5.25. Stationäres Drehmoment-Drehzahl-Kennlinienfeld zweipoliger Maschinen (p=1),
links: Asynchronmaschine mit Kurzschlussläufer, rechts: Synchronmaschine.
uS
un
n
S
SpannungsStellbereich
Feldschwächung
me,n Feldme
Stellereich
Bild 5.26.
Statorspannung und Flussverkettung in Funktion der Drehzahl bei einer Drehfeldmaschine
(Statorwiderstand vernachlässigt)
Der lastseitige Stromrichter ist das Stellglied für die Regelung der Maschine. Ohne zusätzliche Regelung verhält sich ein Spannungszwischenkreis-Stromrichter am Ausgang
wie eine einstellbare Spannungsquelle. Durch die Steuerung bzw. Regelung kann das
Verhalten aber dem Motor angepasst werden. Der Zwischenkreis muss eine DC-Quelle
darstellen. Soll die Maschine auch abgebremst werden können, so muss ein Energieaustausch in beiden Richtungen möglich sein, d.h. es muss auch Energie in den Zwischenkreis zurückgespeist werden können.
Die Anforderungen an den Frequenzumrichter können wie folgt formuliert werden:
1. Die Ausgangsfrequenz soll in einem bestimmten Bereich (meist von null bis zu einem
vorgegebenen Maximalwert) stetig variiert werden können. Der Maximalwert liegt gewöhnlich unterhalb von 200Hz, kann bei speziellen Anwendungen jedoch bis einige
kHz betragen. Zusätzlich muss die Phasenfolge umkehrbar sein (Drehrichtung).
2. Die Statorgrössen sollen im stationären Betrieb ein symmetrisches Dreiphasensystem
mit möglichst sinusförmigen Spannungen beziehungsweise Strömen bilden. Jede Abweichung von der idealen Form verursacht Drehmomentpulsationen und zusätzliche
Verluste.
3. Die Statorspannung, beziehungsweise bei einer Stromregelung der Statorstrom, müssen in der Amplitude stetig von null, oder einem Wert nahe bei null, bis zum Maximalwert eingestellt werden können.
4. Die Wirk- und Blindleistung am Ausgang wird durch die Maschine, bzw. deren Regelung bestimmt. Eine ASM benötigt für den Feldaufbau stets induktive Blindleistung,
105 5 Stromrichter und Frequenzumrichter
während bei einer umrichtergespeisten SM die Blindleistung induktiv, kapazitiv oder
auch null sein kann.
5. Die geforderte Dynamik des Antriebes gibt die Geschwindigkeit vor, mit welcher der
lastseitige Stromrichter in der Lage sein muss, seine Ausgangsgrössen zu verstellen.
5.4.5 Schaltung für die Maschinenseite
Im Leistungsbereich bis zu einigen MW wird auf der Lastseite des dreiphasigen Spannungszwischenkreis-Umrichters überwiegend der selbstgeführte Stromrichter in Tabelle
5.5 eingesetzt. Er ist prinzipiell identisch mit der Schaltung 4) für die Netzseite. In rein
gesteuerter Ausführung verhält er sich für die Last wie eine Spannungsquelle. Der Verlauf der geschalteten Ausgangsspannungen ist durch das Steuerverfahren bestimmt. Der
Strom in der Last kann sich frei einstellen. Der Stromrichter ist so in der Lage, nach Bedarf Wirk- und Blindleistung abzugeben bzw. aufzunehmen. Ohne zusätzliche Regelung
hängt die Kurvenform des Laststromes von der Spannung und von der Impedanz der Last
ab. Durch die Anwendung geeigneter Steuerverfahren für den Stromrichter können die
gewünschten Verläufe sehr gut angenähert werden.
Tabelle 5.5. Maschinenseitiger Stromrichter: Schaltung, Strangspannung und Leistungen
uL
Schaltung
Leistungen
QL
ud
DFM
uStrang
t
PL
Strangspannung
5.4.6 Standard SR-Kombination
Für Stromrichter im kleinen und mittleren Leistungsbereich (bis einige 100kW) hat sich
die Standard-Kombination von Diodengleichrichter mit Bremswiderstand auf der Netzseite und einem FET- oder IGBT Stromrichter auf der Maschinenseite gemäss Bild 5.27
etabliert. Die Kombination kann immer im Motorbetrieb arbeiten, gleichzeitig auch in
geringem Umfang im Bremsbetrieb. Begrenzendes Element ist der Bremswiderstand Rd
im Zwischenkreis. Eine Energierückspeisung ins Netz ist damit aber nicht möglich! Dazu
würde ein Stromrichter gemäss Bauform 3) oder 4) in Tabelle 5.3 benötigt.
iN
uN
Filter,
Ladeschaltung
5.4 Stromrichter-Bauformen 106
Netzfilter
Ladeschaltung
ud/2
Rd
iS
DFM
ud/2
Anst.
uStrang
Spannungsbegrenzung
Bild 5.27. Standard Stromrichter-Kombination
5.4.7 Leistungen und Wirkungsgrad bei FU
Für viele Betrachtungen werden einfache Leistungsbilanzen vom Ein- zum Ausgang des
Frequenzumrichters benötigt. Anhand von Bild 5.28 werden die Grundeigenschaften von
Wirk- und Blindleistung kurz diskutiert. Vorerst wird angesetzt, dass die beiden Stromrichter und der Zwischenkreis verlustfrei sind. Bei den üblichen hohen Wirkungsgraden
von Stromrichtern ist dieser Ansatz in guter Näherung zulässig.
Wirkleistung: Bei verlustlosen Stromrichtern fliesst auf dem Weg vom Netz zur Maschine und umgekehrt überall die gleiche Wirkleistung und es gilt (5.19).
P N = Pd = P L
(5.19)
Blindleistung: Bei idealer Glättung fliesst im Zwischenkreis keine Blindleistung. Auch
in der Realität ist sie sehr klein. Weiter ist die Blindleistung im Zwischenkreis nur sehr
begrenzt an die Blindleistung der jeweiligen Wechselspannungsseiten gekoppelt. Praktisch gilt: Die Blindleistungen von Last- und Netzseite sind unabhängig.
Abhängig von der Art der Stromrichter, deren Ansteuerung, des Netzes und der Last
können in den drei Phasen der Wechselspannungsseiten aber beliebige Blindleistungen
fliessen. Im Extremfall können beide Stromrichter unabhängig voneinander als reine
Blindleistungsquellen bzw. -senken arbeiten.
fN
netzseitiger
Stromrichter
Netzseite: uN, iN, PN, QN
DC
Energiespeicher
DC
Zwischenkreis: ud, id, Pd
lastseitiger
Stromrichter
fL
Lastseite: uL, iL, PL, QL
Bild 5.28. Prinzipschema für die Betrachtungen von Wirk- und Blindleistungen
Scheinleistung, Leistungsbilanz und Leistungsfaktor: Sind bei einem symmetrischen
System die Effektivwerte von Spannungen und Strömen bekannt, so ist die Scheinlei-
107 5 Stromrichter und Frequenzumrichter
stung bestimmt. Bei bekannter Wirkleistung können damit der Leistungsfaktor und der
Betrag der Blindleistung Q bestimmt werden, (5.20).
S=
3U I ;
= P S;
Q=
2
S –P
2
(5.20)
Netz- beziehungsweise Maschinen- und Stromrichterbelastung sind durch die Scheinleistung bestimmt. Werden die Stromrichter nicht gezielt zur Steuerung von Blindleistung
benutzt, so wird deshalb möglichst nahe bei 1 angestrebt, d.h. die Blindleistung soll so
klein wie möglich sein. Damit werden die Effektivwerte der Ströme minimal.
Grundschwingungs-Leistungsfaktor cos : Bei sinusförmigen Grössen ist der cos
identisch mit dem Leistungsfaktor . (Bei verzerrten Grössen kann für jede Frequenzkomponente ein cos angegeben werden. Dazu ist aber jeweils eine Fourieranalyse der
betrachteten Signale notwendig.)
Richtwerte für die realen Wirkungsgrade von Stromrichtern und Zwischenkreis:
Für Abschätzungen von Wirkungsgraden können bei Nennleistung die folgenden Zahlenwerte angenommen werden:
Diodengleichrichter: 0.980.99 , Zwischenkreis: 0.990.995 .
Für den lastseitigen Stromrichter gilt in Abhängigkeit der Leistungen etwa der Verlauf in
Bild 5.29. Bei kleinen Leistungen trägt der Leistungsbedarf der Hilfsschaltungen wie Ansteuerungen und Messungen wesentlich zur Reduktion des Wirkungsgrades bei!
0.95
0.90
0.1kW
1
10
100
1MW Pn
Bild 5.29.
Typischer Wirkungsgrad von fremdgeführten
dreiphasigen Stromrichtern
Damit liegen die Gesamt-Wirkungsgrade von kompletten Umrichtern zwischen
0.85 Str 0.95 , abhängig von der Baugrösse.
Dazu kommen anschliessend noch die Wirkungsgrade der Maschinen, die üblicherweise
wesentlich kleiner sind als diejenigen der Umrichter.
5.5 Der selbstgeführte dreiphasige SR
Für die Beschreibungen der Stromrichter werden die Leistungshalbleiter als ideal angenommen: Eingeschaltet haben sie keinen Spannungsabfall, ausgeschaltet keinen Leck-
5.5 Der selbstgeführte dreiphasige SR 108
strom und die Schaltvorgänge sind unendlich schnell. Weiter sei ein eventueller Sternpunkt der Last nicht mit dem Gleichspannungszwischenkreis verbunden, d.h. für die Ströme gilt i U + i V + i W = 0 . Mit diesen beiden Voraussetzungen ergeben sich handliche mathematische Beschreibungen der SR. Für detaillierte Herleitungen, abweichende Schaltungen oder nicht erfüllte Voraussetzungen sei auf das Buch ‚Steuerverfahren für selbstgeführte Stromrichter‘ [Jen1] verwiesen.
5.5.1 Zeitdiskrete Beschreibung
Die Leistungshalbleiter eines Brückenzweiges werden im Gegentakt angesteuert, d.h.
entweder leitet der untere oder der obere HL, beziehungsweise die jeweilige parallele Diode. Im Umschaltzeitpunkt sind während einer sehr kleinen Sicherheits-Zeitspanne beide
steuerbaren HL ausgeschaltet. In diesem Phase wird die Ausgangsspannung durch die
Richtung des Laststromes in den Dioden des Brückenzweiges bestimmt.
Jeder der so betriebenen Brückenzweig kann durch einen Umschalter modelliert werden, wie in Bild 5.30 dargestellt. Das resultierende vollständige Modell des Stromrichters
mit Last zeigt Bild 5.31.
+ud/2
+ud/2
s
+1
iL
iL
s
-1
Bild 5.30.
Vom physikalischen Brückenzweig zum
Modell als einfacher Umschalter
s
-ud/2
-ud/2
id
ud/2
0
+1
SU
Ud
ud/2
U
uU
iU
uUV
uU0
-1 +1
iV
uWU
V
SV
uVW
uV0
-1 +1
iW
W
SW
uW0
-1
uV
eU
uW
eV
Lk
eW
uN0
Bild 5.31. Vereinfachtes Modell der dreiphasigen Brücke mit Last
Die Schalter werden mit den Schaltfunktionen sU, sV und sW angesteuert. Diese beschreiben die Zustände der Umschalter in den Zweigen. Sie können zwei Werte annehmen: Ist
s= +1, so ist der Ausgang auf den positiven Anschluss der Zwischenkreisspannung ge-
109 5 Stromrichter und Frequenzumrichter
schaltet und bei s= -1 auf den negativen Anschluss. Mit dem Modell lassen sich die Mittelpunktspannungen uU0, uV0, und uW0 auf einfache Weise exakt angeben (5.21).
ud
ud
u
u U 0 = s U -----;
u V 0 = s V -----;
u W 0 = s W -----d
2
2
2
(5.21)
Die Phasenspannungen uU, uV und uW, sowie die Ströme iU, iV und iW, sind durch die Last
bestimmt.
Aus den Lastströmen iU, iV und iW lässt sich mittels der drei Schaltfunktionen der Zwischenkreisstrom id berechnen (5.22).
1
i d = --- s U i U + s V i V + s W i W
2
(5.22)
Mit den Schaltfunktionen sind der Stromrichter und seine Zustände jederzeit vollständig
beschrieben.
Die verketteten Spannungen uUV, uVW und uWU sind ebenfalls durch die Schaltfunktionen
der beiden beteiligten Brückenzweige bestimmt (5.23).
u
u UV = s U – s V -----d ;
2
u
u VW = s V – s W -----d ;
2
u
u WU = s W – s U -----d
2
(5.23)
Sie können damit die 3 Spannungs-Niveaus +ud, 0 und -ud annehmen. Dies sind die Spanungen, die über den drei Strängen einer in Dreieck geschalteten Last auftreten.
Ist die Last in Stern geschaltet, so gilt für die Phasenspannungen uU, uV und uW (5.24).
uU = uU 0 – u N 0 ;
uV = uV 0 – u N 0 ;
uW = uW 0 – u N 0
(5.24)
Die Sternpunktspannung uN0 stellt sich abhängig von der Art der Last ein. Für den üblichen Fall einer symmetrischen Last ohne Gleichtaktkomponente gilt (5.25), was eingesetzt in (5.24) nach einer Umrechnung für die Phasenspannungen (5.26) ergibt:
u
u N 0 = s U + s V + s W -----d
6
U
(5.25)
sV sW ud
sU sW ud
sU sV ud
= s U – ----- – ------- ----- ; u V = s V – ----- – ------- -----; u W = s W – ----- – ------ ----
2
2 3
2
2 3
2
2 3
(5.26)
Die möglichen Kombinationen der Schalterstellungen von SU, SV und SW des SRs ergeben die 8 verschiedenen Stromrichterzustände 0Z bis 7Z. Sie sind zusammen mit den entsprechenden Spannungen in der Tabelle 5.6 zusammengestellt. Es zeigt sich, dass bei den
Mittelpunktspannungen zwei, bei den Phasenspannungen 5 und bei der Sternpunktspan-
5.5 Der selbstgeführte dreiphasige SR 110
nung 4 Schaltniveaus auftreten. Die drei Phasen können über den Stromrichter kurzgeschlossen werden, indem alle Umschalter in dieselbe Stellung (alle +1 oder alle -1) gebracht werden.
Zustand sU sV sW uU0
0Z
-1 -1 -1 -ud/2
uV0
uW0
uU
uV
uW
uN0
-ud/2
-ud/2
0
0
0
-ud/2
1Z
1
-1
-1
ud/2
-ud/2
-ud/2
2ud/3
-ud/3
-ud/3
-ud/6
2Z
1
1
-1
ud/2
ud/2
-ud/2
ud/3
ud/3
-2ud/3
ud/6
3Z
-1
1
-1
-ud/2
ud/2
-ud/2
-ud/3
2ud/3
-ud/3
-ud/6
4Z
-1
1
1
-ud/2
ud/2
ud/2
-2ud/3
ud/3
ud/3
ud/6
5Z
-1
-1
1
-ud/2
-ud/2
ud/2
-ud/3
-ud/3
2ud/3
-ud/6
6Z
1
-1
1
ud/2
-ud/2
ud/2
ud/3
-2ud/3
ud/3
ud/6
7Z
1
1
1
ud/2
ud/2
ud/2
0
0
0
ud/2
Tabelle 5.6.
Schaltzustände
und Spannungen des dreiphasigen
Stromrichters
Die Zustände 0Z und 7Z ergeben Phasenspannungen von null und werden deshalb als
Nullzustände bezeichnet. Im Gegensatz dazu wird für 1Z bis 6Z die Bezeichnung spannungsbildende Zustände verwendet.
5.5.1.1 Beschreibung mittels Drehzeigern
Die geschalteten Mittelpunkt- und Phasenspannungen eines dreiphasigen Stromrichters
können auch als Drehzeiger uStr in der -Ebene dargestellt werden. Dabei resultieren
als Ortskurve der Zeigerspitze 8 diskrete Werte, entsprechend den diskreten Stromrichterspannungen. Der Drehzeiger uStr beschreibt gleichzeitig die Mittelpunkt- und die Phasenspannungen, da die eventuell in der Mittelpunktspannung vorhandenen Gleichtaktkomponenten (identisch mit uN0) nicht in den Zeiger eingehen. Die acht Stromrichterzustände mit den entsprechenden Komponenten von uStr und der zugehörigen Sternpunktspannung sind in Tabelle 5.7 zusammengestellt.
Bild 5.32. zeigt die Lage der Zeiger in der -Ebene. Die Spitzen der sechs spannungsbildenden Zeiger liegen gleichmässig verteilt (Winkelschritt /3) auf einem Kreis mit
dem Radius 2ud/3. Sie definieren damit die sechs /3-Sektoren S1 bis S6. Die Nullspannungs-Zeiger 0U und 7U haben die Länge null. Die zugehörige Sternpunktspannung kann
der Tabelle 5.6 entnommen werden.
Laststrom und Stromverzerrungen: Bei der Beschreibung des Stromrichters mittels
Schaltfunktionen enthalten die Ausgangsspannungen neben der gewünschten niederfrequenten Spannung höherfrequente Anteile. Diese verursachen in den Lasten Verzer-
111 5 Stromrichter und Frequenzumrichter
Zustand Zeiger uStr
uStr,
uStr,
|uStr|
0Z
0U
0
0
0
1Z
1U
2ud/3
0
2ud/3
2Z
2U
ud/3
ud/ 3
2ud/3
3Z
3U
-ud/3
ud/ 3
2ud/3
4Z
4U
-2ud/3
0
2ud/3
5Z
5U
-ud/3
-ud/ 3
2ud/3
6Z
6U
ud/3
-ud/ 3
2ud/3
7Z
7U
0
0
0
3U
2U
S2
S3
Tabelle 5.7.
DrehzeigeruStr, - und -Komponenten
und Betrag von uStr
S1
1U
4U
0U=7U
S4
5U
2ud/3
S5
S6
6U
Bild 5.32.
Spannungszustände des Stromrichters in
Drehzeigerdarstellung
rungsströme. Bei gegebener Stromrichter-Ausgangsspannung können die Ströme mit
Hilfe des Lastmodells in Bild 5.31 bestimmt werden.
5.5.2 Zeitkontinuierliche Beschreibung
Die exakte Beschreibung des Stromrichters mittels Schaltfunktionen benötigt in Simulationen viel Rechenzeit. Für viele Untersuchungen genügt es aber das Verhalten der Schaltung für die kurzzeitigen Mittelwerte bzw. die Grundschwingung zu betrachten. Dies gilt
insbesondere für Regelungen und für Leistungsbetrachtungen (Wirk- und Blindleistungen). Betrachtet wird der in Bild 5.33 skizzierte Zweig U des Stromrichters. Bei der
Steuerung des Stromrichters geht es darum, die Ausgangsspannung uU0 möglichst gut einem vorgegebenen kontinuierlichen Sollwert uU0,Soll folgen zu lassen. Wegen der geschalteten Charakteristik von uU0 kann dies jedoch, wie in Bild 5.34 dargestellt, nur für
den kurzzeitigen Mittelwert uU0 erreicht werden. Er entspricht dem niederfrequenten Anteil in uU0, der sich ergibt, wenn jeweils über einen vollständigen Taktzyklus (Taktintervall) TT gemittelt wird (5.27).
5.5 Der selbstgeführte dreiphasige SR 112
ud/2
0
ud
id
SU
ud/2
+1 U
-1
Bild 5.33.
Stromrichter-Zweig für die Betrachtung der
kurzzeitigen Spannungsmittelwerte.
uU0
TT
uU0,SolluU0
uU0
t
TT
uU0,SolluU0
t
uU0
Bild 5.34. Nachbildung des Sollwertes uU0,Soll durch den kurzzeitigen Mittelwert uU0
links: mit niedriger Schaltfrequenz, rechts: mit höherer Schaltfrequenz
1
u U 0 t = ------TT
t + TT 2
u U 0 d
(5.27)
t – TT 2
Die Länge des Zeitintervalls TT hängt von der Schaltfrequenz ab. Im Bild 5.34 ist ersichtlich, dass es mit grösserer Schaltfrequenz kleiner wird. Die Nachbildung des Sollwertes
ist dadurch besser.
Kurzzeitige Mittelwerte können von allen am Stromrichter auftretenden Grössen, d.h.
Schaltfunktionen, Spannungen und Strömen gebildet werden. In vielen Anwendungen
sind die Sollwerte sinusförmig. Die kurzzeitigen Mittelwerte entsprechen dann näherungsweise den Grundschwingungen der verschiedenen Grössen.
5.5.2.1 Die Modulationsfunktion m(t)
Die zeitkontinuierliche Beschreibung basiert darauf, dass in den diskreten Gleichungen
(5.21) und (5.22) die Momentanwerte sU, sV und sW der Schaltfunktion durch die entsprechenden kurzzeitigen Mittelwerte ersetzt werden. Gleichzeitig wird angenommen, dass
sich die Zwischenkreisspannung ud wegen der guten Glättung kurzzeitig nicht stark ändert, so dass sie bei der Bildung des kurzzeitigen Mittelwertes eine Konstante darstellt.
Dasselbe gilt für die Phasenströme iU, iV und iW. Am Beispiel der Phase U resultiert so
der Ausdruck (5.28). Die Grösse m U = s U wird als Modulationsfunktion m(t) bezeichnet; sie verläuft proportional zum Sollwert uU0,Soll.
u
u
u
u U 0 = s U -----d = s U -----d = m U -----d
2
2
2
(5.28)
113 5 Stromrichter und Frequenzumrichter
Im Stromrichtermodell können bei Verwendung der Modulationsfunktion die Schalter
durch Multiplikationen ersetzt werden, wie in Bild 5.35 gezeichnet.
id
ud/2
Ud
0
uU0
mU
ud/2
iV
V
mV
W
mW
uU
iU
U
uV0
iW
uW0
Lk
uV
eU
uW
eV
eW
uN0
Bild 5.35. Modell der dreiphasigen Brücke mit Modulationsfunktionen
Für die Spannungen aller drei Phasen und den Zwischenkreisstrom resultieren schliesslich (5.29), (5.30) und (5.31), mit den Modulationsfunktionen mU, mV und mW.
u
u U 0 = m U -----d ;
2
u
u V 0 = m V -----d ;
2
u
u W 0 = m W -----d
2
(5.29)
u
u N 0 = m U + m V + m W -----d
6
(5.30)
1
i d = --- m U i U + m V i V + m W i W
2
(5.31)
Oft sind die Modulationsfunktionen mit der Periodendauer T1 symmetrisch, so dass gilt:
m U t = m t ;
T
m V t = m t – -----1- ;
3
2T
m W t = m t – ---------1
3
(5.32)
Ist zusätzlich auch die Last symmetrisch, so wird id zu einem reinen Gleichstrom ohne
Pulsationsanteil.
Zeitverzögerung des zeitkontinuierlichen Modulators: Werden Modulatoren und
Stromrichter mittels Schaltfunktionen beschrieben, so ist auch das zeitliche Verhalten
richtig erfasst. Bei der zeitkontinuierlichen Beschreibung wird das über eine Trägerperiode gemittelte Verhalten des Stromrichters betrachtet. Die Verzögerung, die zwischen
dem Eingangssignal des Modulators und den Ausgangsspannungen des Stromrichters
auftritt, ist kurz: Sie beträgt je nach Modulationsverfahren im statistischen Mittel eine
viertel Periode (bei analogen Trägerverfahren oder zweifacher Abtastung pro Periode)
oder bis zu einer halben Periode (bei einmaliger Abtastung pro Periode). Die Verzögerung kann mittels eines Totzeitgliedes oder einem Tiefpass erster Ordnung modelliert
werden. Diese Funktion wird am einfachsten den in Bild 5.35 gezeichneten Multiplika-
5.6 Modulator und Steuerverfahren für dreiphasige SR 114
toren vorgeschaltet. Die Verzögerung durch die Modulation ist im Vergleich zu den anderen Verzögerungen in den meisten Fällen vernachlässigbar.
5.6 Modulator und Steuerverfahren für dreiphasige SR
Die Schaltfunktionen sU, sV und sW werden im Modulator entsprechend dem gewählten
Steuerverfahren erzeugt. Der Modulator kann dabei eine elektronische Schaltung in digitaler oder analoger Ausführung sein. Heute werden dafür überwiegend programmierbare
Bausteine und Rechner eingesetzt.
Indirekt sind die Eingangsgrössen des Modulators die Mittelpunktspannungs-Sollwerte uU0,Soll, uV0,Soll und uW0,Soll, die am Ausgang des Stromrichters erzeugt werden sollen.
Oft werden die Soll-Spannungen für den Modulator in die einheitslosen Sollwerte xU,Soll,
xV,Soll und xW,Soll umskaliert (und der Index 0 weggelassen). Die beiden Grössen unterscheiden sich nach (5.33) um den Skalierungsfaktor 2/ud. Mit dieser Skalierung sind die
Beträge der Sollwerte xU,Soll, xV,Soll und xW,Soll immer kleiner oder maximal gleich Eins.
2
u U 0 V 0 W 0 Soll ---- = x U V W Soll
ud
(5.33)
Die realen Ausgangssignale des Modulators sind die Schaltfunktionen sU, sV und sW. Wie
vorgehend diskutiert, gehen diese im idealisierten zeitkontinuierlichen Fall in die Modulationsfunktion m t über, und für den Modulator resultiert (5.34). Die Wirkungskette illustriert Bild 5.36.
2
u U 0 V 0 W 0 Soll ----- = m U V W t
ud
uU,Soll
uV,Soll
uW,Soll
(5.34)
xU,V,W,Soll
2/Ud
+ud/2
Modulator
mU,V,W,Soll
Skalierung
Stromrichter
sU,V,W
-ud/2
uU0,Ist
uV0,Ist
uW0,Ist
0
Bild 5.36. Wirkungskette: Sollwerte- Skalierung- Modulator- Stromrichter
Ein guter Modulator erzeugt die Schaltfunktionen sX so, dass die kurzzeitigen Mittelwerte u X 0 Ist der Stromrichter-Ausgangsspannungen praktisch exakt den Sollwerten
u X Soll entsprechen. Die unerwünschten Spannungsanteile, hervorgerufen durch das diskrete Schalten der Leistungshalbleiter, bleiben klein und treten erst bei hohen Frequenzen
auf.
115 5 Stromrichter und Frequenzumrichter
Für die Erzeugung der Schaltfunktionen aus den vorgegebenen Sollwerten werden verschiedenste Steuerverfahren eingesetzt. All diese Verfahren haben ihre speziellen Eigenschaften, die sie für bestimmte Anwendungen geeignet machen. Mathematisch ist die Behandlung meist schwierig und oft nur numerisch möglich. Die Thematik ist im Buch
‚Steuerverfahren für selbstgeführte Stromrichter‘ [Jen1] ausführlich behandelt.
Modulationsgrad M: Für die Quantifizierung der Aussteuerung des Stromrichters mit
harmonischen Grössen sowie bei der Fourieranalyse von Sollwerten und StromrichterAusgangsspannungen wird der Modulationsgrad M verwendet. M beschreibt die Amplitude der Spannungen bezogen auf die halbe Zwischenkreisspannung (5.35), beziehungsweise die Aussteuerung in Bezug auf den maximal möglichen Wert.
u t = u d 2 M sin t ;
(5.35)
m t = M sin t ;
5.6.1 Grundfrequenzsteuerung
Analytisch einfach und transparent lässt sich der Fall der Grundfrequenzsteuerung behandeln. Hier wird jeder Brückenzweig während je einer Halbperiode auf +ud/2 und auf
-ud/2 geschaltet. Die resultierenden Spannungen sind also gleichspannungsfrei. Die drei
Schaltfunktionen bestehen je aus einem symmetrischen Rechtecksignal; alle drei zusammen bilden ein dreiphasiges symmetrisches System (Phasenlagen: 0; 2/3 und 4/3), wie
in Bild 5.37 dargestellt.
s
sU
sV
sW
Bild 5.37. Schaltfunktionen bei Grundfrequenzsteuerung (Verläufe vertikal leicht versetzt)
Mittelpunkt- und Phasenspannungen:
Bild 5.38 zeigt die Verläufe und Spektra der Mittelpunkt- und Phasenspannungen bei
konstanter Zwischenkreisspannung ud. Die Spektra unterscheiden sich nur in der 3. Harmonischen und deren Vielfachen (Gleichtaktkomponenten) voneinander. Diese treten
nur in der Mittelpunktspannung auf. Die Fourierreihe der Mittelpunktspannung beschreibt (5.36) und der Phasenspannung (5.37).
4u
u U 0 t = --- -----d
2
= 1 3 5 7 9
1
--- sin 1 t
(5.36)
5.6 Modulator und Steuerverfahren für dreiphasige SR 116
ud/2
uU
dB
uU0
uU
uU0
uG
1t/2
f/f1
Bild 5.38. Grundfrequenzsteuerung: links: Mittelpunkt- und Phasen- und Sternpunktspannungen,
rechts: Spektra der Phasen- und Mittelpunktspannungen, 0dB: Ud/2
4u
u U t = --- -----d
2
= 1 5 7 11 13
1
--- sin 1 t
(5.37)
Die Harmonischen in den Phasen V und W sind jeweils um 3 verschoben. Dabei
bilden diejenigen der Ordnungen 1, 7, 11, 19, 23, 31 usw. Systeme mit Phasenfolge U/V/
W und diejenigen der Ordnungen 5, 13, 17, 25 usw. solche mit umgekehrter Phasenfolge
U/W/V. Die Amplituden, die Effektivwerte und der Modulationsgrad M sind für alle drei
Phasen identisch. Einfache Rechnungen führen auf die Werte in (5.38) und (5.39).
ud
ud
4u
1 4u
4
û U = 1 = --- -----d = 1.273 -----;
U U = 1 eff = ------- --- -----d = 0.900 -----;
M = --2
2
2
2
2
(5.38)
U U eff =
ud
8--- u-----d = 0.943 ----92
2
(5.39)
Die relative Amplitude der Grundschwingung, der Modulationsgrad M, entspricht bei
der Grundfrequenzsteuerung dem maximal erreichbaren Wert 4/ und kann nicht variiert
werden.
Lastströme: In praktisch allen Anwendungen zeigen die Lasten von Stromrichtern Tiefpass-Charakteristik. Dadurch werden oberhalb der Grenzfrequenz der Last die von den
Spannungsharmonischen erzeugten Ströme schnell kleiner.
5.6.2 Trägerverfahren
Trägerverfahren sind die klassischen Pulsweitenmodulationsverfahren. Sie werden häufig verwendet, da sie in Analog- und Digitaltechnik einfach implementiert werden kön-
117 5 Stromrichter und Frequenzumrichter
nen und gute Resultate liefern. Die Bezeichnung ‚Trägerverfahren‘ stammt ursprünglich
aus der Nachrichtentechnik: Bei der Amplitudenmodulation wird dort die Amplitude eines hochfrequenten, sinusförmigen Trägersignals proportional zu einem Sollwertsignal
(Sprache, Musik) moduliert. Analog dazu wird bei der Pulsweitenmodulation die Breite
von Rechteckpulsen in Abhängigkeit eines Sollwertsignales variiert.
Trägerverfahren werden vereinzelt auch als Unterschwingungsverfahren bezeichnet.
5.6.2.1 Erzeugen der Schaltsignale
Das Funktionsprinzip der Trägerverfahren lässt sich einfach am Beispiel eines Brückenzweiges in Bild 5.39 zeigen: Ein Trägersignal, im Bild das Dreiecksignal xT, wird mit
dem Sollwertsignal xU,Soll verglichen. Ist das Sollwertsignal grösser als das Trägersignal,
so wird die erzeugte Schaltfunktion sU=+1 und andernfalls sU=-1.
0
1
id
ud/2
Ud
SU
+1 U
-1
ud/2
xU,Soll
-1
uU0
xT
t
0
1
-1
sU
xT
xU,Soll
-
sU~uU0
tE
t
TT
Bild 5.39. Funktionsprinzip der Trägerverfahren
Um einfache Verhältnisse zu erhalten, wird nachfolgend die Amplitude des Trägersignals immer eins gewählt. Bei unverzerrter Modulation darf die Amplitude des Sollwertsignales höchstens gleich derjenigen des Trägersignals sein:
– x̂ T x U Soll x̂ T ,
x̂ T = 1
– 1 x U Soll 1
(5.40)
Für die qualitative Betrachtung wird angenommen, dass xU,Soll innerhalb einer Trägerperiode TT konstant ist. Die Zeit tE, ist dann, abgesehen von einer Konstanten, proportional zum Sollwert xU,Soll. Mit (5.41) lässt sich der kurzzeitige Mittelwert der Schaltfunktion sU und daraus derjenige der Phasenspannung uU0 über eine Trägerperiode TT berechnen.
1
s U = ------TT
TT
sU dt = xU Soll ,
0
U
u U 0 = -------d x U Soll
2
(5.41)
5.6 Modulator und Steuerverfahren für dreiphasige SR 118
Der kurzzeitige Mittelwert uU0 der Phasenspannung uU0 kann mit diesem Verfahren in
sehr guter Näherung proportional zum Sollwert xU,Soll geführt werden. Die Übereinstimmung ist umso besser, je weniger der Sollwert innerhalb der Trägerperiode ändert.
Spannungsspektra bei Trägerverfahren: Die Spektra bei Trägerverfahren haben immer den gleichen Aufbau. Dieser wird am Beispiel in Bild 5.40 diskutiert: Im Basisband
(Frequenzbereich des Sollwertsignals) liegen die Spektrallinien des Sollwertsignales.
Bei einem sinusförmigen Sollwert ist dies eine einzelne Spektrallinie bei f1. Um die Vielfachen der Trägerfrequenz fT treten die Trägerbänder auf; das erste um die einfache Trägerfrequenz fT das zweite um die doppelte Trägerfrequenz 2fT und so fort. Jedes dieser
Trägerbänder lässt sich in eine Spektrallinie bei der n-fachen Trägerfrequenz sowie in ein
unteres- bzw. ein oberes Seitenband zerlegen. Welche Spektrallinien mit welcher Amplitude auftreten, ist von der Art der Modulation abhängig. Insbesondere treten die Vielfachen des Trägersignals selbst oft nicht auf. Es können aber auch ganze Trägerbänder fehlen.
Träger
unteres- oberes Seitenband
dB
f1
Basisband
2fT
fT
erstes
Trägerband
zweites
Trägerband
uA0
3fT
drittes
Trägerband
ff1
Bild 5.40.
Spannungsspektrum
eines Brückenzweiges
bei Trägerverfahren,
fT/f1=15, M=0.8
0dB: Ud/2
5.6.2.2 Sollwert- und Trägersignale bei dreiphasiger PWM
Als Sollwerte können verschiedene Verläufe verwendet werden. Oft sollen die Phasenspannungen ein symmetrisches Dreiphasensystem bilden, bestehend aus drei um je eine
Drittelperiode versetzten, identischen sinusförmigen Signalen. Diese lassen sich einfach
erzeugen, indem als Sollwerte für die Mittelpunktspannungen drei symmetrische Funktionen verwendet werden (5.42):
u U 0 V 0 W 0 Soll = U d 2 x U 0 V 0 W 0 Soll = U d 2 M sin 1 t + U V W
U V W = 0 – 2 3 – 4 3
(5.42)
Der Modulationsgrad M darf dabei maximal eins werden, da sonst der Modulator übersteuert wird und dadurch niederfrequente Verzerrungen entstehen.
119 5 Stromrichter und Frequenzumrichter
Die Summe der drei Sollwerte ist null. Damit enthält die Sternpunktspannung keinen
Grundschwingungsanteil und die Mittelpunkt- und Phasenspannungen sind identisch
entsprechend den Verläufen in Bild 5.41.
uU0=uU
Ud/2
uV0=uV
uW0=uW
1t/2
dB
uU
uU0
f/f1
Bild 5.41. Links: niederfrequente Anteile der Mittelpunkt- und Phasenspannungen bei sinusförmigen Sollwerten, M=0.8; rechts: Spektra der geschalteten Phasen- und Mittelpunktspannung, fT/f1=21, 0dB: ud/2
Vergrösserung der maximalen Sollwertamplitude: Die Eigenschaft, dass Gleichtaktkomponenten der Mittelpunktspannungen in den Phasenspannungen nicht mehr auftreten, kann zur Vergrösserung der Sollwertamplituden und damit zur erweiterten Aussteuerung des Stromrichters ausgenutzt werden. Dazu wird allen 3 Sollwerten für die Brückenzweige das Gleichtaktsignal uG,Soll mit der dreifachen Grundfrequenz zugefügt (injiziert). Es ist im einfachsten Fall ein Sinussignal gemäss (5.43).
u
u G Soll = A I M -----d sin 3 1 t
2
(5.43)
Die resultierenden niederfrequenten Anteile (Spannungen im Basisband) von Mittelpunkt-, Sternpunkt- und Phasenspannung zeigt Bild 5.42 links. Im gleichen Bild rechts
sind die Spektra von Phasen- und Mittelpunktspannung dargestellt. Es zeigt sich, dass bei
gleichem Modulationsgrad die Amplitudenverteilung der Spektrallinien in den Trägerbändern so ist, dass die gesamten Verzerrungen von Spannungen und Strömen kleiner
sind als bei rein sinusförmigen Sollwerten.
Amplitude der 3. Harmonischen für maximale Aussteuerung: Die Amplitude AI der
injizierten Harmonischen kann nach verschiedenen Gesichtspunkten gewählt werden.
Meistens wird sie so optimiert, dass der zulässige Modulationsgrad maximal wird. Das
Amplitudenverhältnis AI von 3. Harmonischer zur Grundschwingung wird üblicherweise
fest gewählt, d.h. AI bleibt konstant. AI in (5.43) kann mit Hilfe einer einfachen Überlegung bestimmt werden: Beim Winkel /3 in Bild 5.42 kann die Amplitude der Mittel-
5.6 Modulator und Steuerverfahren für dreiphasige SR 120
dB
uU0
ud/2
uU
uU0
uG
uU
1t/2
f/f1
Bild 5.42. Links: niederfrequente Anteile von Mittelpunkt, Sternpunkt- und Phasenspannung bei
Injektion einer 3. Harmonischen, AI=1/6, M=1.155, rechts: zugehörige Spannungsspektra der geschalteten Mittelpunkt- und Phasenspannung für fT/f1=21, 0dB: ud/2
punktspannung uU0,Soll mit der 3. Harmonischen nicht beeinflusst werden, da diese dort
null ist (Bild 5.42). Deshalb wird AI so gewählt, dass die Mittelpunktspannung bei /3
maximal ist (Tangente horizontal) und es resultiert (5.44):
A I = 1 6 = 0.167
(5.44)
Der Modulationsgrad M kann jetzt soweit vergrössert werden, bis die Sollwerte für die
Mittelpunktspannungen bei /3 den Wert Ud/2 erreichen. Man erhält so den grösstmöglichen Modulationsgrad ohne niederfrequente Verzerrungen in den Phasenspannungen, der sich bei dreiphasigen Stromrichtern erreichen lässt (5.45):
M max = 2 3 = 1.155
(5.45)
Für die Sollwertsignale mit Injektion der dritten Harmonischen resultiert damit
schliesslich (5.46).
u U 0 V 0 W 0 Soll = U d 2 M sin 1 t + U V W + A I sin 3 1 t
U V W = 0 – 2 3 – 4 3
(5.46)
Trägersignale: Im Prinzip können für alle 3 Brückenzweige verschiedene Trägersignale
gewählt werden. Identische Amplitudenspektra ergeben sich bei dreiphasigen Stromrichtern aber nur, wenn für alle 3 Brückenzweige die gleiche Signalform verwendet wird. Die
Trägerfrequenz und deren Vielfache sind in diesem Fall Gleichtaktkomponenten, d.h. sie
sind nur in den Mittelpunkt- und Sternpunktspannungen vorhanden und fallen in den
Phasenspannungen weg.
121 5 Stromrichter und Frequenzumrichter
5.6.2.3 Realisierung von Modulatoren
Analoge Realisation: Ein einfacher analoger Modulator lässt sich mit Operationsverstärkern und Komparatoren realisieren, wie das in Bild 5.43 dargestellt ist. Für den typischen Fall einer 15V Speisung und 10V maximal Amplitude der Sollwerte wird der
Komparator des Dreieckgenerators so ausgelegt, das er bei 10V umschaltet. Die Dreieckamplitude erreicht so die notwendigen 10V; die Frequenz wird durch R1 und C bestimmt.
Als Sollwertsignale können beliebige Verläufe verwendet werden. Insbesondere können dies symmetrische harmonische Funktionen mit und ohne injizierte dritte Harmonische sein.
Die Qualität der so erzeugten Schaltfunktionen ist gut! Die Lösung hat aber die bekannten Nachteile analoger Schaltungen: Eine beschränkte Genauigkeit wegen der Toleranzen der verwendeten Komponenten, Rauschen, Offset und Temperaturdrift. Falls dies
stört, so kann die Problematik mit der Verwendung von besseren Bauteilen etwas entschärft werden.
xU,Soll
+
-
sU
xV,Soll
+
-
sV
xW,Soll
+
-
sW
C
R1
-
R3
+
Integrator
R2
Komparator
Dreieck-Generator
Bild 5.43.
Einfacher analoger Pulsweitenmodulator mit
Operationsverstärker und Komparatoren
Digitale Realisation von Trägerverfahren: Heute werden meist digitale Schaltungen
für die Modulation eingesetzt. Sie sind robust und bieten Flexibilität. Ist auch die Regelung digital implementiert, so stehen die Eingangsgrössen des Modulators bereits in digitaler Form zur Verfügung. Viele Prozessoren enthalten bereits einfache digitale Modulatoren. Sie lassen sich auch gut in digitalen Schaltkreisen implementieren.
5.6.3 Drehzeigermodulation
Die Drehzeigermodulation ist heute wohl das wichtigste und gebräuchlichste ‚On-Line‘
Modulationsverfahren für dreiphasige Brückenschaltungen. Die Gründe dafür sind die
5.6 Modulator und Steuerverfahren für dreiphasige SR 122
gute Qualität der Spektra und die Eignung des Verfahrens für die digitale Implementation
auf Rechnern beziehungsweise (programmierbaren) digitalen Bausteinen. Die Drehzeigermodulation ist eng mit den Trägerverfahren für die gleichen Schaltungen verwandt:
Es kann gezeigt werden, dass die Drehzeigermodulation einer Trägermodulation entspricht, bei der die Sollwerte im Zeitabstand TTast abgetastet werden. Bei den gebräuchlichen Realisierungen treten in den Mittelpunktspannungen zusätzlich dritte Harmonische und deren Vielfache auf. Was das Verfahren noch interessanter macht ist, dass der
maximale Modulationsgrad dadurch wieder M max = 2 3 = 1.155 wird. (Bei noch
grösserem Modulationsgrad treten zusätzlich niederfrequente Harmonische auf.)
Wie der Name andeutet, werden die Schaltfunktionen mit Hilfe von Drehzeigern erzeugt. Die Schaltung und die Drehzeiger der zugehörigen geschalteten Mittelpunkt- bzw.
Phasenspannungen in der -Ebene zeigt Bild 5.44. Da jede dreiphasige Brückenschaltung nur die acht diskreten Zustände 0Z...7Z einnehmen kann (Kapitel 5.5.1), sind die
Momentanwerte von Mittelpunkt- und Phasenspannungen und damit die entsprechenden
acht Spannungszeiger 0U bis 7U bestimmt.Von den Zeigern sind sechs ungleich null und
liegen paarweise mit umgekehrtem Vorzeichen auf den drei um 2/3 versetzten Achsen
a,b,c. Die zwei Zeiger 0U und 7U haben die Länge null. Zwischen den Spannungszeigern
1U...6U liegen die Sektoren S1...S6. Die Länge der Zeiger 1U...6U beträgt je 2U /3.
d
id
ud/2
0
+1
SU
ud
ud/2
U
uU
iU
uU0
-1 +1
iV
V
SV
uV0
-1 +1
iW
W
SW
uW0
-1
b
eU
uV
S3
4U
eV
uW
eW
Lk
5
2U
1
7U
S4
uN0
S2
3U
0U
a
6
U
c
S1
U
U
S6
S5
Bild 5.44. Links: dreiphasige Brücke im Zustand 7Z, rechts: Spannungszeiger 0U...7U
5.6.3.1 Realisierung eines Drehzeigermodulators
Analog wie bei den Phasengrössen können kurzzeitige Mittelwerte von Drehzeigern definiert werden. Die Mittelung erfolgt dabei über eine Abtastperiode TTast. Der kurzzeitige
Mittelwert des Spannungszeigers u Str wird damit wie folgt gebildet:
1
u Str = ------------T Tast
kU
t + T Tast
t
k
1
u Str dt = ------------- U t k ;
T Tast k
tk
k
= T Tast
(5.47)
sind die während der Zeit tk auftretenden Spannungszeiger. Pro Abtastperiode treten
k verschiedene Zustände auf. Für den in Bild 5.45 links dargestellten Zeiger u Str gilt so:
123 5 Stromrichter und Frequenzumrichter
1
2
u Str = u + u,
t1 1
u = ------------ U,
T Tast
1
mit
t2 2
u = ------------ U
T Tast
2
(5.48)
Aufgabe der Drehzeigermodulation ist nun, den Zeiger u Str so zu erzeugen, dass er dem
Sollwert uSoll möglichst gut entspricht. Den prinzipiellen Ablauf zeigt Bild 5.45 rechts:
uSoll wird in festen Zeitabständen TTast abgetastet und dann mit den möglichen diskreten
Stromrichterspannungen nachgebildet. Für die Bildung von u Str in einer Abtastperiode
werden in der Praxis nur die zwei nächstliegenden der spannungsbildenden Zeiger
1U...6U verwendet. Deren Gewicht wird durch ihre Einschaltdauer variiert. Während der
verbleibenden Zeit einer Abtastperiode werden einer oder beide Nullspannungszeiger 0U
bzw. 7U angelegt. Der Betrag von u Str ist durch die Maximalaussteuerung begrenzt.
Je grösser die Abtastfrequenz, desto kleiner werden der Verzerrungsstrom und die
Drehmomentwelligkeit. Das Verhältnis von Abtast- zu Grundschwingungsperiode TTast/
T1 kann beliebig sein, d.h. das Verfahren ist vom Prinzip her asynchron.
Sollwerte uSoll im Abstand n*TTast
Start
S2
uSoll einlesen
2U
(n+2)*TTast
S1
(n+1)*TTast
u Str
1
1u
2u
S6
n*TTast
1U
Zeiger xu bestimmen
-> Zustände und deren Einschaltdauer
Ansteuern des Stromrichters
t > n*TTast
nein
ja
Bild 5.45. Links: Bildung des Spannungszeigers u Str aus den Zeigern 1U und 2U,
rechts: Ablauf der Drehzeigermodulation (n: ganze Zahl)
Abfolge der Stromrichterzustände:
Beim Wechsel von einem Schaltzustand auf den nächsten können im Stromrichter ein,
zwei oder 3 Schaltvorgänge stattfinden. Die Schaltzustände und die möglichen Zustandsübergänge sind in Bild 5.46 links, in der gleichen räumlichen Anordnung wie die entsprechenden Spannungszeiger in der -Ebene gezeichnet. Zusätzlich sind die zwei Nullzustände 0Z und 7Z separiert aufgetragen. Jeder Pfeil bedeutet, dass ein Brückenzweig
schaltet. Wird von einem Zustand auf den nächsten gewechselt, ergibt das nur einen
Schaltvorgang im Stromrichter. Zwei Schaltvorgänge erfolgen beim Überspringen des
direkt benachbarten und 3 beim Wechsel in den inversen Schaltzustand (z.B. 1Z 4Z).
5.6 Modulator und Steuerverfahren für dreiphasige SR 124
3Z
2Z
1
Z
4
Z
7Z
0Z
5Z
Bild 5.46.
Übergänge zwischen den 8 Schaltzuständen
6Z
Unter Berücksichtigung des Zieles, den Stromrichter mit einer möglichst niedrigen
Schaltfrequenz zu betreiben, sind die Zustandsübergänge mit nur einem Schaltvorgang
zu bevorzugen.
Sind die innerhalb einer Taktperiode benötigten Spannungszustände bestimmt, so stellt
sich die Frage, in welcher Folge sie optimal geschaltet werden. Für die folgende Betrachtung wird davon ausgegangen, dass der Stromrichter pro Taktperiode zwei spannungsbildende Zustände (1Z...6Z) und mindestens einen Nullzustand einnehmen muss.
Am Ende der Taktperiode TTast wird bei allen betrachteten Anordnungen die Ablaufreihenfolge umgekehrt. Damit wird erreicht, dass an dieser Stelle nicht geschaltet wird.
Bild 5.47 links zeigt das Blockdiagramm für einen Drehzeigermodulator. Am Eingang
liegen der Modulationsgrad M und der aktuelle Phasenwinkel des Sollwertzeigers uSoll
an. In einer Sektorlogik wird zuerst der Sektor S1...6 des Sollwertzeigers und der RestClock
M~|uSoll|
C
’ 0.../3
Sektorlogik
S3 S2
C
Timer
1Z
t0/1/2/7
logisches
Schaltwerk
sU+/V+/W+
sU-/V-/W-
nach t0
2Z
nach t2
nach t1 nach t7
0Z
nach t0
S1...6
S1 u
Soll
’
S4 S5 S6
nach t1
CO L
nach t2
7
Z
nach t7
neue Eingangsdaten neue Eingangsdaten
PROM
Einschaltzeiten
t0/1/2/7 =F(’,M)
0Z 0Z 1Z
t0
2
Z
t1 t2
TTast
7
Z
t7 t7
2
Z
1
Z 0Z 0Z
t2 t1
TTast
t0
t
Bild 5.47. Drehzeigermodulator mit logischem Schaltwerk,
links: Blockdiagramm, rechts: Zustandsdiagramm und Schaltsequenz für den Sektor S1
winkel ’ innerhalb dieses Sektors bestimmt. Der Sektor legt die Schaltsequenz, d.h. die
125 5 Stromrichter und Frequenzumrichter
Abfolge der Schaltzustände fest. Im Beispiel im Bild rechts für den Sektor S1 sind dies
innerhalb eines Abtastintervalls die Zustände 0Z, 1Z, 2Z, 7Z und in umgekehrter Reihenfolge zurück auf 0Z im nächsten Intervall. Die Parameter M und ’ ergeben die zugehörigen Einschaltzeiten t0/1/2/7. Die Einschaltzeiten t1 und t2 berechnen sich gemäss (5.49)
und (5.50). Die Winkelfunktionen können in einem PROM tabellarisch abgelegt sein, damit sie nicht online berechnet werden müssen. Die verbleibende Zeit jedes Abtastintervalles wird gleichmässig auf t0 und t7 aufgeteilt. Die Summe der Schaltzeiten t0 bis t7
bzw. t7 bis t0 ist so stets gleich dem Abtastintervall TTast des Modulators.
t1 =
u Str
3T Tast ----------- sin
--- – = T Tast M ------3- sin
--- –
3
3
Ud
2
(5.49)
t2 =
u Str
3
3T Tast ----------- sin = T Tast M ------- sin
Ud
2
(5.50)
Das Schaltwerk liest die Zeiten in der richtigen Reihenfolge aus und lädt sie einzeln in
einen Timer. Jeweils nach Ablauf einer Einschaltzeit sendet dieser ein Carry-Output-Signal (CO) an das Schaltwerk zurück. Darauf werden die sechs Schaltsignale am Ausgang
des Modulators entsprechend dem nächsten Zustand 0...7Z umgeschaltet. Der Carry-Output startet über den Load-Eingang (L) auch gleich den Timer wieder, bei dem in der Zwischenzeit die nächste Einschaltzeit programmiert worden ist. In jedem Nullzustand (0Z
bzw. 7Z) werden die Eingangsdaten aktualisiert. Das Schaltwerk kann auch die minimalen Ein- und Ausschaltzeiten der Leistungshalbleiter überwachen und garantieren.
Die zeitliche Auflösung der Schaltflanken ist primär durch den Clock des Timers bestimmt. Es ist jedoch zu beachten, dass die tabellarisch abgelegten Einschaltzeiten auf
quantisierten Werten für den Modulationsgrad und den Phasenwinkel des Sollwertzeigers beruhen. Diese Quantisierung sollte mit der Clockfrequenz und mit der Wortbreite
für die Einschaltzeiten abgestimmt sein.
Für weiterführende Informationen zum Thema Modulationsverfahren sei auf [Jen1]
verwiesen.
5.7 Selbstgeführte SR als Stromquelle
Viele Regelkonzepte für Stromrichter am Netz oder zusammen mit DFM basieren auf einer Stromquellencharakteristik. Ein Stromrichter mit Spannungszwischenkreis verhält
sich am Ausgang aber wie eine Spannungsquelle. Mit einer zusätzlichen Regelung kann
ihm das Verhalten einer Stromquelle aufgeprägt werden, wie in Bild 5.48 dargestellt.
5.7 Selbstgeführte SR als Stromquelle 126
Stromregler
ixy,Soll
mxy
sUVW
Modulator
Stromrichter
uUVW
Netz/
DFM
ixy,Ist
iUVW,Ist
UVW
XY
Bild 5.48. Blockdiagramm der Stromregelung eines Spannungszwischenkreis-Umrichters
Für die Auslegung dieses Strom-Regelkreises wird ein Streckenmodell benötigt. Wie
nachfolgend gezeigt wird, können unter gewissen Bedingungen, die in der Praxis normalerweise in guter Näherung erfüllt sind, Netz, SM und ASM mit der zeitkontinuierlichen
Ersatzschaltung in Bild 5.49 modelliert werden. Netz und Maschinen erscheinen dabei
nur noch als Tiefpässe erster Ordnung mit Gegenspannung. Die Tripel von Induktivitäten
und Widerstände sind identisch und die drei Spannungen, eU, eV und eW symmetrisch.
uU0
iU,Ist
uV0
iV,Ist
uW0
uU
R
L
uV
R
L
uW
iW,Ist
R
Stromrichter
L
eU
eV
eW
Netz/ DFM
Bild 5.49.
Stromrichter mit Netz-/
Maschinenersatzschaltung
als Modell für die Regelung
Die Regelung der Phasenströme könnte über drei getrennte Kreise in uvw-Darstellung
realisiert werden. Da in Dreiphasensystemen der Sternpunkt normalerweise nicht angeschlossen wird, ist die Summe der Ströme null und damit das System mit drei Regelkreisen überbestimmt. Eindeutig wird es, wenn nur zwei Ströme geregelt werden. Dafür bieten sich die Zweiachsen- (Zeiger-) Darstellungen von Netz und Maschinen an. Das entsprechende Modell ist in Bild 5.50 für eine -Darstellung abgebildet.
u
i,Ist
u
i,Ist
Stromrichter
R
L
e
R
L
e
Netz/ DFM
Bild 5.50.
Zweiachsenmodell für die
Stromregelung
127 5 Stromrichter und Frequenzumrichter
5.7.1 Reglerstrukturen
Die Beschreibung des Systems und die Implementierung der Regelung kann nun in verschiedenen Darstellungen erfolgen. Für Anwendungen am Netz und für Antriebe werden
Dreh- () und Festzeigerdarstellungen (xy, dq) verwendet. Für hohe Ansprüche und
feldorientierte Maschinen-Regelungen sind Festzeigerregelungen vorteilhaft.
Für das hergeleitete Modell nach Bild 5.50 gelten die Schreibeweise in komplexer
Form gemäss (5.51) und in Komponenten- Schreibweise (5.52). Zusätzlich sind dabei für
die Regelung die Komponenten noch in den Frequenzbereich Laplace Transformiert.
d- i + e
u = Ri + L ---
dt
di
L -------- = u – Ri – e
dt
di
L ------- = u – Ri – e
dt
(5.51)
U e
1 - ------I = --------------------- - – -----
sL R + 1 R R
U e
1
I = ----------------------- ------- – -----
sL R + 1 R R
(5.52)
Die Gleichungen in Darstellung lassen sich beliebig in andere Koordinatensysteme
transformieren. Für Stromrichter am Netz und flussorientierte Asynchronmaschinen hat
die Darstellung in xy-Koordinaten und für Synchronmaschinen in dq-Koordinaten, gemäss Bild 5.51, grosse praktische Bedeutung:
Das mit K drehende Koordinatensystem wird dabei so gelegt, dass die Netzspannung
auf der y-Achse liegt. Bei Maschinen wird das Koordinatensystem so gelegt, dass der
Fluss auf der x- und damit der Vektor der induzierten Spannung wiederum auf der y-Achse (imaginäre Achse) liegt. Entsprechend resultiert in xy-Koordinaten (5.53) und in xyKomponenten (5.54).
y/q
e
K
x/d
Bild 5.51.
Fluss und Spannung im mit K rotierenden Koordinatensystem
d
u xy = Ri xy + L ----- i xy + j K Li xy + je xy
dt
(5.53)
5.7 Selbstgeführte SR als Stromquelle 128
di
L ------x- = u x – Ri x + K Li y
dt
di
L ------y- = u y – Ri y – K Li x – e
dt
K L
U X
1
I X = ----------------------- -------- + I Y ----------
sL R + 1 R
R
(5.54)
K L e
U
1
– ---
I Y = ----------------------- -------Y- – I X ----------sL R + 1 R
R
R
Die einzelnen Stromregelkreise erhalten die Struktur in Bild 5.52: Jede Komponente der
Regelstrecke in - oder xy-Darstellung kann als Tiefpass erster Ordnung modelliert
werden. Dazu kommen der Stromrichter ebenfalls als einfacher Tiefpass und der Stromregler selber. Die induzierte Spannung e, sowie die Kopplung bei der xy-Darstellung,
sind zusätzliche Eingänge der Kreise, dargestellt als Störgrössen.
iSoll
iIst
PI (D)
kP; kI, kD
Stromregler
m
TP1:
kSR; TSR
Stromrichter
u
e, Kopplung
TP1 (R,L):
kM; TM
iIst
Netz-/ Maschinenmodell
Bild 5.52. Struktur der Stromregelungen
Für die nachfolgenden Betrachtungen werden Stromrichter und Netz beziehungsweise
Maschine gegeben angenommen. Die Ansteuerung des Stromrichters geschieht über Modulatoren, deren Sollwerte in - Darstellung vorgegeben werden können (Drehzeigermodulator oder Modulator mit vorgeschalteter - uvw - Transformation). Dem Modulator kann noch eine Gleichtaktkomponente uG zugefügt sein, um die maximal mögliche
Aussteuerung zu erreichen.
5.7.1.1 Regelstruktur im statorfesten -System (Drehzeiger)
Für die Regelung im - Koordinatensystem wird von den Führungs- und Stör- Übertragungsfunktionen der Maschine in (5.52) ausgegangen. Es resultiert die Regelstruktur in
Bild 5.53 und das Blockdiagramm in Bild 5.54.
Die zu regelnden Ströme der Maschine müssen für die Regelung von den messbaren
u,v,w- Grössen auf die zwei Komponenten transformiert werden.
Die Grössen gemäss Bild 5.54 sind im stationären Betrieb harmonische Funktionen,
was zu einer ständigen Regelabweichungen führt. Dem kann ein Stück weit begegnet
werden, indem die Stromregelung als Zweipunktregelung (Toleranzbandregler) ausgeführt wird. Diese sind prinzipbedingt sehr schnell.
129 5 Stromrichter und Frequenzumrichter
+
i,Soll
PI
SR
PI
SR
u
e
+
i,Soll
u
e
Regelung und Stromrichter
R
+
-
1/L
1/s
i
+
-
1/L
1/s
i
R
Netz / DFM
Bild 5.53. -Regelstruktur
m
i,Soll
+
-
i,Soll
+
-
uU0
Regler
i,Ist
m
Modulator
und
Stromrichter
uV0
uW0
Netz/
FM
Regler
i,Ist
i,Ist
i,Ist
uvw
iU,V,W,Ist
Bild 5.54. Blockdiagram der Regelung mit -Komponenten
5.7.1.2 Regelung im rotierenden xy-System (Festzeiger)
Für die Regelung im xy-Koordinatensystem wird von der Führungs- und Stör-Übertragungsfunktionen in (5.54) ausgegangen. Zusammen mit der Regelung resultiert die Regelstruktur in Bild 5.55. Über die drehzahlabhängigen Komponenten K Li x y sind die
beiden Teile gekoppelt, d.h. sie beeinflussen sich gegenseitig. Im stationären Betrieb
kann die Beeinflussung durch die PI-Regler vollständig ausgeregelt werden. Ändert die
Drehzahl der Maschine nicht zu schnell, so kann der Einfluss auch im dynamischen Betrieb klein gehalten werden.
Bei einer Regelung mit Festzeigern im rotierenden Koordinatensystem sind die Grössen im stationären Fall Gleichgrössen, wie in Bild 5.56 skizziert. Damit können die Regler die Modulator-Sollwerte exakt einstellen. Dafür muss dem Modulator als zusätzliche
Information der zeitabhängige Referenzwinkel = 0 + 1 t zugeführt werden. Dieser
entspricht der Lage des rotierenden xy-Koordinatensystems in Bezug auf das ruhende
-System. In der gleichen Art müssen die gemessenen Grössen in das drehende Koordinatensystem gewandelt werden.
5.7 Selbstgeführte SR als Stromquelle 130
+
ix,Soll
SR
PI
+
+
ux
KL
+
SR
PI
iy,Soll
KL
uy
+
-
e
Netz/
FM
Regelung und Stromrichter
R
1/Lx
1/s
ix
1/Ly
1/s
iy
R
Bild 5.55. xy-Regelstruktur
ix,Soll
mx
+
-
iy,Soll
+
-
Regler
ix,Ist
uU0
xy
my
uW0
Netz/
FM
Regler
iy,Ist
uV0
Modulator
und
Stromrichter
ej
ix,Ist
iy,Ist
= 0 + 1 dt
xy
i,Ist
i,Ist
uvw
e-j
Bild 5.56. Blockdiagramm der Regelung mit xy-Komponenten
Genügt die Geschwindigkeit der Regelung für dynamische Vorgänge nicht, so kann die
Koppelung, wie in Bild 5.57 eingezeichnet, mit einer Vorsteuerung der inversen Signale
eliminiert werden, so dass die beiden Pfade im Idealfall unabhängig sind. In der Realität
wird das nur in guter Näherung möglich, da ja bei der Modellierung vereinfachende Annahmen gemacht wurden. Praktisch wird die Einspeisung der Vorsteuerung mit Vorteil
vor Modulator und Stromrichter gemacht, wie in Bild 5.58 dargestellt. Dabei werden
dann noch Skalierungen der Werte notwendig.
Bemerkungen: In Bild 5.54, Bild 5.56 und Bild 5.58 ist dargestellt, dass bei beiden Regelkonzepten (für den identischen Betriebsfall) die gleichen Ausgangsspannungen benötigt werden.
Es ist zu beachten, dass die Strom-Istwerte in der Praxis wegen der geschalteten Spannung am Stromrichter stets Verzerrungen aufweist. Diese können unter Umständen die
Regelung ungünstig beeinflussen. Aus diesem Grund werden die Istwerte in der Regel
leicht gefiltert. Bei digitalen Regelungen empfiehlt sich zusätzlich die zur PWM synchrone Abtastung der Ströme.
131 5 Stromrichter und Frequenzumrichter
+
ix,Soll
SR
PI
ux
+
SR
PI
iy,Soll
uy
Regelung und Stromrichter
-
KL
KL
+
KL
KL
+
+
-
e
Netz/
FM
Vorsteuerung
R
+
+
+
1/Lx
1/s
ix
1/Ly
1/s
iy
R
Bild 5.57. xy-Regelstruktur mit Vorsteuerung der Kopplung
Modulator, Stromrichter und die zusätzliche Filterung erhöhen die Ordnung des Regelkreises und bestimmen massgebend die erreichbare Regelgeschwindigkeit.
ix,Soll
mx
+
-
iy,Soll
+
-
uU0
Regler
ix,Ist
my
Kopplung,
Vorsteuerung
uV0
Modulator
und
Stromrichter
uW0
Netz/
FM
Regler
iy,Ist
ix,Ist
= 0 + 1 dt
ix,Ist
iy,Ist
iy,Ist
ej
xy
i,Ist
i,Ist
e-j
Bild 5.58. Blockdiagram der Regelung mit xy-Komponenten und Vorsteuerung
uvw
5.7 Selbstgeführte SR als Stromquelle 132
5.7.2 Modellierung der Maschinen für die Auslegung der Stromregelung
Die Betrachtungen der Gleichungen für die Statorspannungen von ASM und SM zeigen,
dass für die Beschreibung ein innerer Maschinenzustand benötigt wird. Bei der Synchronmaschine wird dazu üblicherweise der Erregerfluss E verwendet. Zumindest
kurzfristig ist dieser konstant und kann für die Regelung als Parameter verwendet werden. Bei der ASM ist direkt keine solche Grösse vorhanden. Indirekt kann aber genutzt
werden, dass ja der Strom so geregelt wird, dass im Nennbetriebsbereich ein innerer
Fluss (S, h, R) konstant bleibt. Die entsprechenden Stromsollwerte für den Stromregelkreis werden aus dem für die Regelung eingesetzten Maschinenmodell gewonnen.
5.7.2.1 Darstellung der ASM
Wird bei DFM von konstantem Fluss gesprochen, so bedeutet das, dass seine Amplitude
konstant ist. Der Flusszeiger selbst rotiert aber mit der Kreisfrequenz gegenüber dem
Stator. Im stationären Betrieb ist =S. Wird für die Herleitung des Statorspannungs/
-strom Modells von einer drehfeldfesten Maschinendarstellung ausgegangen (xy-Koordinaten), so steht der Flusszeiger still.
Konstanter Fluss im -System:
Ein erster Ansatz für die Auslegung von Stromreglern ist die Darstellung im bekannten
stillstehenden -System. Da die Stromregelung im stillstehenden Koordinatensystem
keine sehr grosse Bedeutung hat, wird nur der Fall des konstanten Rotorflusses betrachtet. (Die Herleitung für konstanten Statorfluss ist trivial und die eines konstanten Hauptflusses analog zum konstanten Rotorfluss.) Ausgegangen wird von den Gleichungen
(5.55), (5.56) und (5.57).
d
u S = R S i S + ----------Sdt
S = i S L S + h ;
(5.55)
h = im Lh
2
L
Lh
S = i S ------ + R ------;
LR
LR
2
(5.56)
2
L = LS L R – Lh
(5.57)
Für die Analyse bei konstantem Rotorfluss wird in (5.55) (5.57) eingesetzt und es resultiert (5.58).
2
L di
L d
u S = R S i S + ------ -------S- + ------h -----------R
L R dt L R dt
(5.58)
133 5 Stromrichter und Frequenzumrichter
Bei der vorausgesetzten konstanten Amplitude ist der Fluss im stationären Betrieb eine
j t
j t
harmonische Funktion: R = R e . Die Ableitung d R dt = j S R e
des Flusses
für diesen Fall kann in (5.58) eingesetzt werden und es resultiert (5.59).
S
S
2
L di
Lh
j S t
u S = R S i S + ------ -------S- + j ------
Re
S
L R dt
LR
(5.59)
Für die Darstellung der Gleichungen als Klemmengrössen wird (5.59) unter Zuhilfenahj t
= cos S t + j sin S t in die -Komponenten aufgeteilt (5.60) und anme von e
schliessend in das Dreiphasensystem transformiert.
S
2
uS
L d iS Lh
- – ------ S R sin S t
= R S i S + ------ -----------L R dt
LR
2
L d iS
(5.60)
Lh
u S = R S i S + ------ ------------- + ------
cos S t
L R dt
LR S R
Bei der Rücktransformation in Dreiphasengrössen entspricht die -Komponente direkt
den Grössen in der Phase U entsprechend (5.61). Die Gleichungen für die Phasen V und
W haben die gleiche Struktur, mit dem Unterschied, dass die induzierten Spannungen um
je 2/3 verdreht sind.
2
uU
L d iU Lh
= R S i U + ------ -------- – ------ sin S t
L R dt L R S R
(5.61)
Konstanter Fluss im mit K rotierenden xy-Koordinatensystem:
Ausgegangen wird von der Gleichung für die Statorspannung der ASM im rotierenden
Koordinatensystem (5.62), der Darstellung des Statorflusses durch den Statorstrom und
den Rotorfluss in (5.57) sowie durch den Statorstrom und den Hauptfluss in (5.56):
d
u S = R S i S + ----------S- + j K S
dt
(5.62)
Mit den Gleichungen werden die drei BetriebsfälleS, h oderR konstant diskutiert.
Konstanter Statorfluss: Den einfachsten Fall zeigt direkt (5.62). Bei konstantem Fluss
wird der Term d S dt null und es resultiert (5.63).
u S = R S i S + j K S
Konstanter Hauptfluss: In (5.62) wird (5.56) eingesetzt und es resultiert (5.64).
(5.63)
5.7 Selbstgeführte SR als Stromquelle 134
di
u S = R S + j K L S i S + L S -------S- + j K h
dt
(5.64)
Durch die Rotation treten zwei Terme auf: Ein ‚Zusatz‘ zum ohmschen Widerstand
j K L S und die durch den Fluss h induzierte Spannung j K h . Beide werden
durch den Faktor j um 90 Grad gedreht.
Konstanter Rotorfluss: Wird in (5.62) Gleichung (5.57) eingesetzt, so resultiert (5.65).
2
2
L
L di
Lh
u S = R S + j K ------ i S + ------ -------S- + j ------
L R
L R dt
LR K R
2
2
2
2
uS x
L d iS x Lh
L
= R S i S x – K ------i
+ ------ ------------ – ------
S
y
LR
L R dt L R K R y
uS y
L
L d iS y Lh
= R S i S y + K ------ i S x + ------ ------------ + ------ K R x
LR
L R dt
LR
(5.65)
Der Aufbau der Gleichungen ist bei konstantem Haupt- und bei konstantem Rotorfluss
identisch und es gelten die gleichen Bemerkungen.
Beachte: Gelingt es nicht, mit der Regelung den Fluss konstant zu halten, werden noch
zusätzliche Spannungen induziert, die im Regelkreis als Störgrössen wirken.
5.7.2.2 Darstellung der SM
Für die Herleitung der Regelstruktur wird bei der SM von der rotorfesten dq-Darstellung
ausgegangen. Betrachtet wird eine Maschine ohne Dämpferwicklung, der Polradfluss
0 = L dE i E sei konstant. Für die beiden Spannungskomponenten resultieren (5.66) und
(5.67). Bei konstantem Fluss ist der letzte Term d 0 dt in (5.66) wiederum null.
di
d
u d = R S i d + L d -------d- – p me L q i q + ----------0dt
dt
(5.66)
d iq
u q = R S i q + L q -------- + p me L d i d + p me 0
dt
(5.67)
Sobald die Maschine dreht, sind die beiden Gleichungen über die Drehzahl gekoppelt.
Wie bei der ASM vorgestellt, können die Gleichungen für die Stromregelung bei Bedarf in andere Darstellungen umgerechnet werden - beispielsweise in das -System.
135 6 Regelverfahren für Drehfeldmaschinen
6 Regelverfahren für Drehfeldmaschinen
Die Einsatzgebiete von Antrieben sind sehr vielfältig. Geregelte Maschinen erfüllen
praktisch immer Teilaufgaben in grösseren Systemen. Entsprechend muss letztlich auf
ganz verschiedene Grössen geregelt werden. Dies kann in einfachen Fällen direkt eine
der drei Grundgrössen an der Welle sein: Das Drehmoment M, die Drehzahl me oder der
Drehwinkel . Die grundsätzlich Regelstruktur entspricht in diesen Fällen Bild 6.1.
xSoll
Bild 6.1.
Stromrichter,
Ansteuerung,
Schutz
PI (D)
xIst
DFM
M,,Messung
Grundstruktur der Antriebsregelung einer Wellengrösse
Meist treten die schliesslich zu regelnden Grössen aber erst nach Kette von Umformungen auf. Einfache Beispiele sind Getriebe, Umwandlungen von Dreh- auf Translationsbewegungen oder Pumpen zur Förderung flüssiger Medien, wie in Bild 6.2 gezeigt.
Ist
QSoll
QIst
Bild 6.2.
PI (D)
Soll
Durchflussregler
PI (D)
iSoll
iIst
Drehzahlregler
iA
SR mit
Stromregelung
DFM
Q-Messung
Förderpumpe mit Volumenstrom- und unterlagerten Drehzahl und Stromreglern
Eine Regelung mit nur einem Regelkreis direkt auf die Endgrösse ist in den meisten
Fällen nicht ideal. Einige Gründe dafür sind:
- Im Innern des Kreis können einzelne Grössen gefährliche Werte annehmen. Ein Beispiel sind die Motorströme, die so gross werden könnten, dass Stromrichter und Maschine gefährdet sind. Deshalb wird dafür meist ein zusätzlicher Stromregelkreis eingesetzt, der garantiert, dass die Ströme nie grösser werden als der maximal zulässige
Wert. Auch Drehzahlregler werden oft als innere Regelkreise eingesetzt.
- Die Aufteilung des Kreises ergibt bessere dynamische Verhältnisse bei der Verwendung von einfachen PI(D)-Reglern. (Dies könnte auch mit Zustandsreglern erreicht
werden. Die Auslegung und die praktische Handhabbarkeit wird aber schwieriger.) Bei
komplexeren Systemen ist ein einziger Regelkreis über die ganze Strecke undenkbar.
- Bei der Inbetriebnahme bzw. bei Störungen können die Regelkreise von innen nach
aussen getestet und aktiviert werden. Der Betrieb eines Teilsystems ist möglich.
136
Systemabgrenzung für die Antriebsregelung: Strukturen mit mehreren überlagerten
(verschachtelten) Regelkreisen (Bild 6.2) werden als Kaskadenregelungen bezeichnet.
Die meisten Antriebe, bei denen nicht von der Anwendung her direkt auf eine Wellengrösse geregelt wird, sind Teil eines verschachtelten Regelkreises. Einer der Kreise regelt
dabei (fast) immer an der Maschine selbst auf eine der Grundgrössen. Welche dies im
einzelnen Fall ist, hängt ab von der jeweiligen Anwendung: Drehmomentregelungen
werden z.B. für die Zugkraftregelung bei der Traktion benötigt; Fördergeschwindigkeiten und -mengen werden mit Drehzahlregelungen eingestellt und bei Positionierantrieben werden Drehwinkel gefahren.
Es werden auch Kombinationen der Ausgangsgrössen als zu regelnde Grössen verwendet: Bei der Drehwinkelregelung kann beispielsweise gefordert werden, dass ein maximales Drehmoment und eine maximale Drehzahl nicht überschritten werden. Drehmomentregelungen (dies sind indirekt oft Stromregelungen) sind häufig als unterlagerte Regelkreise in Drehzahlregelungen enthalten.
Bei den nachfolgenden Regelkonzepten werden nur Maschinenregelungen auf eine
Wellengrösse betrachtet. Auf die Regelungen ganzer Systeme wird nicht eingegangen;
diese müssen im Zusammenhang mit den jeweiligen Anwendungen betrachtet werden.
Magnetisierung der Maschine, Feldschwächung: Neben der oder den gewünschten
Ausgangsgrössen muss auch die Magnetisierung der Maschine entsprechend den Anforderungen eingestellt beziehungsweise geregelt werden: Im Nennbetrieb soll das maximale Drehmoment abgegeben, aber die Maschine nicht zu stark gesättigt werden. Bei Feldschwächung muss der magnetische Fluss so eingestellt werden, dass die Statorspannung
dem geforderten Wert entspricht.
Maschinenmodelle, elektrische und mechanische Grössen: Falls nicht speziell angegeben, wird nachfolgend für die Diskussion der Verfahren von bekannten Ersatzelementen der Maschine ausgegangen. Von den jeweils benötigten Wellengrössen Drehmoment, Drehzahl oder Drehwinkel wird weiter angenommen, dass sie als Messung zur
Verfügung stehen.
Parameteridentifikation, geberlose Bestimmung der Ausgangsgrössen: Die Bestimmung der Maschinenelemente ist aufwendig und in der Praxis nicht beliebt. Immer mehr
wird deshalb versucht, Verfahren einzusetzen, welche die notwendigen Elemente automatisch bestimmen und damit die Regelparameter selbständig einstellen.
Auch die Messungen mechanischer Grössen ist nicht beliebt, da solche Messeinrichtungen störanfällig und teuer sind. Dem wird mit verschiedenen Verfahren zur geberlosen
Bestimmung begegnet: Während das Moment aus den elektrischen Grössen recht gut bestimmt werden kann, wird dies für die Drehzahl vor allem bei kleinen Werten anspruchsvoll. Die geberlose Bestimmung des Drehwinkels hat kaum Bedeutung, sie ist zu ungenau.
137 6 Regelverfahren für Drehfeldmaschinen
6.1 Drehzahlregelung der Asynchronmaschine
In den praktischen Anwendungen werden in grosser Zahl Antriebe benötigt, bei denen
die Drehzahl gestellt werden kann. Bei einem Teil davon soll eine vorgegebene Drehzahl
erreicht und anschliessend für eine bestimmte Zeit gehalten, bei anderen einem kontinuierlich ändernden Sollwert nachgefahren werden.
Zur Drehzahlbeeinflussung existieren verschiedene Verfahren wie in Bild 6.3 dargestellt.
Deren Einsatz ist abhängig von den zu lösenden Aufgaben. Es gilt allgemein: je höher
die Anforderungen, desto anspruchsvoller und teurer die Regeleinrichtung.
a) Kennlinienverfahren
Spannungs-Frequenz
Steuerung
Bild 6.3.
Strom-Frequenz
Steuerung
b) Fluss-Regelungen
Direkte
Flussregelung
Flussorientierte
(Vektor) Regelung
Übersicht über die wichtigsten Regelverfahren für Asynchronmaschinen
a) Bei mässigen dynamischen Anforderungen kann mit Kennlinienverfahren gearbeitet
werden. Dabei werden nicht alle Grössen der Maschine geregelt. Eine oder mehrere
werden aufgrund einer maschinenspezifischen Kennlinie gesteuert. Bei preisgünstigen
drehzahlvariablen Antrieben mit ASM wird die Statorspannung in Funktion der Statorfrequenz geführt. Die notwendige Spannungs-Frequenz-Kennlinie kann auf verschiedene Arten bestimmt werden. Die Statorfrequenz selbst muss mit einem überlagerten
Drehzahlregler entsprechend der Belastung nachgeführt werden. Bei reduzierten Ansprüchen an die Drehzahlgenauigkeit können solche Antriebe als reine Steuerungen,
ohne Drehzahlmessung ausgelegt werden.
Bei einer weiteren Gruppe von Kennlinienverfahren wird der Statorstrom in Funktion
der Rotorfrequenz geführt. Dazu wird meist eine Messung der Wellendrehzahl nötig.
Kennlinienverfahren sind einfach zu implementieren und robust im Betrieb.
b) Bei hohen Ansprüchen an die Dynamik werden flussorientierte Regelungen eingesetzt. Für diese werden auch die Bezeichnungen, ‘feldorientierte Regelung’ und ‘Vektorregelung‘ verwendet. Auch die ‘Direkte Flussregelung‘ kann unter den Überbegriff
der flussorientierten Regelung gestellt werden.
Beurteilung des dynamischen Verhaltens: Die Reaktion auf Drehzahl- und Laständerungen lässt sich bei bekanntem Steuerkonzept, bekanntem Stromrichter, gegebener Maschine und Last jederzeit mit dem Maschinenmodell in Raumzeiger-Darstellung ermitteln. Dazu wird die ganze Strecke auf einem Rechner modelliert, beispielsweise mit Matlab/Simulink. So lassen sich (fast) alle Betriebsfälle untersuchen, bevor die Anlage wirklich gebaut wird.
6.1 Drehzahlregelung der Asynchronmaschine 138
6.1.1 Spannungs-Frequenzsteuerung der ASM
Im stationären Betrieb entspricht die einfache Kennliniensteuerung dem Betrieb der Maschine am starren Netz - aber mit verschiedenen ‘Netz‘-frequenzen und -spannungen, erzeugt durch den Stromrichter. Gibt es bei der Speisung mit einer einzigen Frequenz nur
eine Drehmoment-Drehzahlkennlinie, so sind es entsprechend bei variabler Frequenz beliebig viele, wie in Bild 6.4. dargestellt. Verhalten und Eigenschaften der Antriebe lassen
sich für diese Betriebsart den auch auf die gleiche Art beschreiben wie am starren Netz.
M
S=pme
A
me
R
Bild 6.4.
Drehmoment-Drehzahl-Verläufe der ASM bei
Speisung mit verschiedenen Frequenzen S,
R = S – p me
A: Betriebspunkt
Für die Bestimmung einer einfachen Kennlinie sollten von der Maschine Nennspannung und -frequenz bekannt sein. Diese finden sich auf dem Typenschild, zusammen mit
Nennstrom und -leistung. Für eine verbesserte Steuerung werden zusätzlich der Magnetisierungsstrom und die Elemente der Ersatzschaltung benötigt. Daten, die sich aus den
Nenndaten und einfachen Messungen bestimmen lassen.
Verändert man die Statorfrequenz der Maschine, so muss im Nennbereich auch die Statorspannung angepasst werden, wie das die Bezeichnung ‘Spannungs-Frequenzsteuerung‘ suggeriert. So wird gewährleistet, dass die Maschine richtig magnetisiert bleibt.
Die Spannungsanpassung in Funktion der Stator-Frequenz wird nachfolgend hergeleitet. Dabei wird davon ausgegangen, dass sich die Maschine im stationären Betrieb befindet, d.h. die Änderungen von Amplituden und Frequenz der Klemmengrössen sind im
Vergleich zu den Zeitkonstanten der transienten Vorgänge langsam.
Die Spannungsführung kann aus der Raumzeiger-Darstellung oder der Transformatorersatzschaltung bestimmt werden. Für ‘quasi-stationäre‘ Betrachtungen ist die einphasige Transformatorersatzschaltung prädestiniert, die Rechnungen werden einfach und
übersichtlich.
6.1.1.1 Nenn-Flussbereich: – n S n
Um die Asynchronmaschine optimal ausnutzen zu können, soll der Fluss so hoch wie
möglich gehalten werden, ohne dass die Maschine (stark) sättigt und der Magnetisierungsstrom zu gross wird, wie das die Magnetisierungskennlinie in Bild 6.5 illustriert. So
lässt sich das maximale Drehmoment erreichen. Bei ihren Nenndaten wird eine normale
Maschine im Bereich der Sättigungsgrenze betrieben und die Stator- und Rotorwicklun-
139 6 Regelverfahren für Drehfeldmaschinen
gen sind mit Nennstrom belastet. Die Sättigung des Eisens wird im Stator durch den Statorfluss S und im Rotor durch den Rotorfluss R bestimmt. Der gemeinsame Fluss ist
der Haupt- oder Luftspaltfluss h durch die Hauptinduktivität Lh der Ersatzschaltung
(Bild 4.22). (Bei den vereinfachten Ersatzschaltungen lassen sich die Flüsse in den Ersatzelementen nicht mehr direkt den Maschinenteilen zuordnen.)
Im
nIm,n
Im
Im,n
US
US,n
Bild 6.5.
Nennbereich S,n Feldschw.
S
Links: Magnetisierungsstrom Im in Funktion der Statorspannung US bei Nennfrequenz,
rechts: Magnetisierungsstrom und Fluss in Funktion der Statorfrequenz
Die Flussführung kann auf einen beliebigen Fluss ausgelegt werden, abhängig von der
gewählten Ersatzschaltung. Üblicherweise wird angestrebt, dass der gewählte Fluss (im
Nennflussbereich) unabhängig von der Belastung und Drehzahl möglichst konstant auf
dem Dimensionierungswert bei Nennbetrieb bleibt. Von den verschiedenen Flüssen kann
bei ändernder Belastung immer nur einer konstant gehalten werden! Aus der gewählten
Ersatzschaltung der ASM ist die notwendige Amplitude der Statorspannung in Funktion
der Statorfrequenz entsprechend herzuleiten. Dazu wird vorausgesetzt, dass die Statorspannungen symmetrisch sind und sich die Maschine im stationären Betrieb befindet.
Für die nachfolgende Herleitung der Spannungs-Frequenz-Kennlinie wird die ASM-Ersatzschaltung verwendet, bei der die Streureaktanzen von Stator- und Rotorseite in eine
einzige Streureaktanz auf der Statorseite zusammengefasst sind. Der Eisenverlustwiderstand RFe wird vernachlässigt. Auf die Kennzeichnung der auf die Primärseite transformierten Rotorgrössen mit (´) wird verzichtet; ebenso auf die Indizes S bei den einzelnen
Elementen zur Betonung der gewählten Ersatzschaltung. Die Umrechnung der Grössen
aus der symmetrischen Transformatorersatzschaltung, und Näherungen dazu, sind in Kapitel 4.2.2 zusammengestellt. (Müssen die Elemente aus einer anderen Ersatzschaltung
umgerechnet werden, so genügen in den meisten Fällen die Näherungsformeln. Bei einer
Neubestimmung werden mit Vorteil direkt die gewünschten Elemente berechnet.)
IS
US
RS
IR
L
Lh
Im
Uq
RR/s=
RR+Rme
Bild 6.6.
ASM- Ersatzschaltung für die Herleitung der
Spannungs-Frequenz-Kennlinie
6.1 Drehzahlregelung der Asynchronmaschine 140
Zur Erinnerung: für den Schlupf s gilt mit der elektrischen Frequenz R im Rotor
s = S – p me S = R S und für den Anteil des Rotorwiderstandes, in dem die
mechanische Leistung auftritt damit R me = R R 1 – s s = R R S R – 1 .
Betrachtet wird als erstes der Leerlauffall, d.h. IR=0 und Im=IS: Für die Statorspannung
in Funktion der Frequenz und des Magnetisierungsstromes gilt hier (6.1).
2
2
U S = I m RS + S Lh + L
2
(6.1)
Die Gleichung lässt sich für zwei Grenzfälle vereinfachen:
- Bei S=0 reduziert sich die Gleichung zu US=ImRS. Wie auch aus der Ersatzschaltung
direkt ersichtlich ist, muss nur soviel Spannung aufgebracht werden, dass der ohmsche
Spannungsabfall über dem Statorwiderstand gedeckt werden kann.
- Bei hohen Drehzahlen, R S « S L h + L , resultiert dagegen U S I m S L h + L .
Damit lässt sich die Leerlaufkennlinie durch zwei Geraden annähern. (Im Übergang zwischen den beiden Bereichen ergibt sich eine leichte Rundung durch die notwendige geometrische Addition von Real- und Imaginärteil der Impedanz: Bild 6.8 und 6.9)
Es stellt sich nun die Frage nach dem Einfluss des Wirkstromes IR bei belasteter Maschine
auf die notwendige Statorspannung. Die Antwort lässt sich mit dem Zeigerdiagramm in
Bild 6.7 illustrieren. (Dargestellt ist ein Betriebsfall mit Teillast und relativ kleiner Drehzahl; die induktiven Spannungsabfälle sind überproportional gezeichnet). Der Spannungsbedarf US0 nur für die Magnetisierung entspricht der vorgehend berechneten Spannung im Leerlauf. In Zeigerschreibweise gilt (6.2).
-IRSL
Im
US U
S
-IRRS
ImSL
IS
US0
Uq=ImSLh
ImRS
Im
-IR
Re
Bild 6.7.
Zeigerdiagramm der Maschinenströme und
-spannungen
U S 0 = I m R S + j S L h + L = I m R S + U q + jI m S L
(6.2)
Zu diesem Spannungsanteil kommt nun der vom Wirkstrom abhängige Teil in (6.3) dazu.
141 6 Regelverfahren für Drehfeldmaschinen
U S = – I R R S + j S L
(6.3)
MitU q = j S I m L h = j S h sowie (6.4) und (6.5) kann mit einer Zwischenrechnung der
Wirkstrom und die Rotorfrequenz (6.6) in Funktion der Belastung bestimmt werden.
2
2
I R R R S
I R RR
M me = 3 ------------ ------- – 1 = 3 p -----------
me R
R
(6.4)
U
I R = ------q- ------R- = ------h- R
R R S
RR
(6.5)
RR
R = --------- M me p ;
2
3 h
1
I R = ---------- M me p
3 h
(6.6)
Mit U S = U S 0 + U S ist nun die notwendige Statorspannung in Funktion des Flusses und
der Belastung exakt bestimmt. Die berechneten Spannungsverläufe für eine typische
ASM, einmal im Leerlauf und einmal belastet, sind in Bild 6.8 dargestellt. Die mechanische Drehzahl ist im belasteten Fall so geführt, dass das Drehmoment immer gleich gross
und positiv ist: R=konst. Die Simulation bestätigt, dass durch die Änderung des Vorzeichens von IR,S im generatorischen Betrieb (bei negativer Drehrichtung) der ohmsche
Spannungsabfall in (6.3) negativ wird. Aus diesem Grund wird bei negativer Drehzahl
die notwendige Spannung für Nennfluss sogar kleiner als im Leerlauf.
In der Praxis werden Spannungs-Frequenz-Steuerungen (fast) nur für Motorbetrieb
optimiert. Zwei mögliche sind in Bild 6.9 skizziert.
UN
UN
Generatorbetrieb
Motorbetrieb
US
Nennlast
US0
Leerlauf
US0
N
Bild 6.8.
US
N
Spannungs-Frequenzkennlinie der ASM im Leerlauf (US0) und bei konstantem,
positivem Moment (US),
links: Nennbereich, rechts: Ausschnitt bei Motorbetrieb und kleinen Drehzahlen
6.1 Drehzahlregelung der Asynchronmaschine 142
Einfache Kennlinien: Bei kleinen, preisgünstigen Antrieben wird die Spannungs-Frequenz-Kennlinie nur aus einer festen Spannung, entsprechend dem Spannungsabfall über
dem Statorwiderstand, und der Spannung Uq in Funktion der Frequenz über der Hauptinduktivität gebildet. Für die Spannung über dem Statorwiderstand kann der Abfall bei
Leerlauf oder bei Nennstrom eingesetzt werden: Bei Verwendung des Leerlaufwertes
wird die Magnetisierung und damit das Drehmoment bei Nennstrom zu klein und umgekehrt tritt bei Verwendung der Spannung bei Nennstrom im Leerlauf etwas Sättigung ein,
was zu einem zu grossen Magnetisierungsstrom führt. Damit das maximale Drehmoment
erreicht werden kann, kompensiert man eher auf den Nennstrom.
Kennlinien-Steuerungen sind immer Näherungen an die idealen Verläufe!
Auch Kleinantriebe benötigen einen einfachen Überstrom- und Überlastschutz. Dieser
muss aber nicht sehr genau sein.
Wird die Spannung nicht der effektiven Belastung angepasst, so können solche Antriebe
bei Überlast kippen. Dies ist leicht einsehbar, wenn man sich bewusst ist, dass der Betrieb
ja dem bekannten Fall einer ASM am Netz entspricht. Das Kippmoment MK nimmt im
Feldschwächbereich zusätzlich quadratisch zur Drehzahl ab, da dort die Spannung konstant ist. Für die Kipp-Rotorfrequenz R,K und das Kippmoment MK gilt bei
R S « S L + L h (6.7).
R K = R R L ;
2
2
M K = 3 U S S 1 L
(6.7)
Berücksichtigung der Belastung: Bei grösseren und teureren Antrieben ist immer eine
gute Strommessung vorhanden, mit der Stromrichter und Motor vor Überlastung geschützt werden können, ohne dass sie überdimensioniert werden müssen. Damit könnte
grundsätzlich eine stromabhängige Last-Kompensation vorgenommen werden, so dass
der Fluss konstant bleibt.
Vorsicht: Das direkte Anheben der Statorspannung aufgrund der gemessenen Statorströme ist eine Mitkoppelung. Das System kann dabei vor allem bei kleinen Drehzahlen
leicht instabil werden und kippen. Vor dieser Lastkompensation ist deshalb abzuraten.
Ist eine Drehzahlmessung vorhanden, so kann die Rotorkreisfrequenz bestimmt werden:
R = S – p me . Ausgehend von (6.5) kann die Statorspannung mit entsprechendem
Aufwand jetzt so geführt werden, dass der Fluss in guter Näherung konstant bleibt. Damit
kippen die Antriebe im Idealfall nicht mehr.
Zwei Spannungs-Frequenzkennlinien mit und ohne Lastkompensation zeigt Bild 6.9.
Temperatur der Statorwicklung: Stator und Rotor der Maschine können sehr warm
werden. Dabei erhöht sich ihr Kupfer-Widerstand um den Faktor 0,004/°C. Dies ergibt
für die Statorwicklung typischerweise einen um 25% grösseren Widerstand, sodass vor
143 6 Regelverfahren für Drehfeldmaschinen
US
US,n
Nennbereich:
Im= konstant
Feldschwächbereich:
Im~ 1/S
Im~S
US
b
a
S,n
S
Bild 6.9.
Praktische Spannungs-Frequenz-Kennlinien:
a) ohne Berücksichtigung der Belastung
b) mit Kompensation der Belastung,
z.B. aufgrund einer Drehzahlmessung
allem bei tiefen Drehzahlen eine weitere Verfälschung auftritt. Diese könnte kompensiert
werden, wenn die Temperatur der Wicklungen (direkt oder indirekt) erfasst würde.
6.1.1.2 Feldschwächung
Die Spannung am Stromrichterausgang kann nur erhöht werden, bis der maximale Modulationsgrad des Stromrichters erreicht ist. Bei richtiger Auslegung der Kombination
Stromrichter und Maschine entspricht das etwa der Nennspannung der Maschine. Darüber kann aber die Frequenz bei konstanter Spannung weiter erhöht werden. Dies führt
dazu, dass der Fluss umgekehrt proportional zur Statorfrequenz absinkt, die Maschine
wird mit Feldschwächung betrieben. Diese Betriebsart ist gängig und sinnvoll. Gegenüber dem Bereich mit vollem Fluss sinkt im Feldschwächbereich das Kippmoment ab: Je
schwächer das Feld, desto früher erreicht die Maschine den zugehörigen Kippschlupf
(6.7). Diese zusätzliche Begrenzung führt dazu, dass zwei Feldschwächbereiche auftreten: zuerst derjenige mit konstanter und anschliessend der mit abnehmender Leistung,
bestimmt durch den Kippschlupf. Es ist wichtig, dass man sich bewusst ist, welche Einflüsse die Feldschwächung hat. Die Zusammenhänge lassen sich aus den ASM- Ersatzschaltungen herleiten. Sie sind in den Verläufen in der Tabelle A.1 ersichtlich.
6.1.1.3 Drehzahl bei Spannungs-Frequenz-Steuerung
Bei der Kennlinensteuerung wird die Maschine aus einer Spannungsquelle mit der Frequenz S gespeist. Die Drehzahl me an der Welle ist aber belastungsabhängig, es tritt
Schlupf auf. Für die Anwendungen interessiert eigentlich nicht die Statorfrequenz, sondern die Drehzahl an der Welle. Je nachdem, wie genau diese eingestellt werden muss,
werden Drehzahlsteuerungen oder -regelungen eingesetzt.
Einfache Drehzahlsteuerung: Sind die Ansprüche gering, so wird angesetzt, dass die
Statorfrequenz (geteilt durch die Polpaarzahl) etwa der mechanischen Drehzahl entspricht. Dieser Ansatz genügt für einen grossen Teil aller Anwendungen. Im Nennflussbereich ist der Fehler proportional zum Drehmoment (6.6). Im Feldschwächbereich wird
er entsprechend der gleichen Gleichung grösser. Die Struktur entspricht Bild 6.10.
6.1 Drehzahlregelung der Asynchronmaschine 144
Stromrichter
Steuersignale
DFM
iL
ÜberstromSchutz
Modulator
Bild 6.10.
Blockdiagramm einer einfachen
Drehzahlsteuerung mit Überstromschutz
nSoll
u/f-Kennlinie
Verbesserte Drehzahlsteuerung: Aus einer Strommessung kann die Belastung der Maschine bestimmt werden. Mit (6.6) lässt sich R berechnen. Um diesen Wert kann anschliessend die Statorfrequenz um den lastabhängen Drehzahlabfall erhöht werden. Dieses Verfahren bringt gute Resultate, ist aber nach wie vor eine (verbesserte) Steuerung.
Dazu muss man sich bewusst sein, dass eine solche Mitkopplung Stabilitätsprobleme mit
sich bringen kann!
Drehzahlregelung: Exakt kann eine Drehzahl nur mittels einer Regelung eingestellt
werden, wie das in Bild 6.11 dargestellt ist. Dazu wird eine Drehzahlmessung benötigt.
Ausgangsgrösse des Reglers kann die Rotorfrequenz R sein. Damit lässt sich die Spannungs-Frequenzkennlinie anschliessend noch lastabhängig anpassen.
Stromrichter
DFM
iL
Steuersignale
Tacho
Modulator
ÜberstromSchutz
S
+
+
u/f-Kennlinien
Steuerung
R’
nIst
p
R
PI(D)
R-Begr. n-Regler
+
nSoll
Bild 6.11.
Blockdiagramm von Drehzahlregler, Spannungs-Frequenzsteuerung
und Überstromschutz
Bemerkungen zu den Spannungs-Frequenz-Kennlinienverfahren: Die dynamische
Qualität der besprochenen Verfahren ist nicht sehr gut. Insbesondere im Bereich kleiner
Drehzahlen lässt sich der Fluss während Last- oder Drehzahländerungen nur schlecht
konstant halten. Für sehr viele Anwendungen genügt die Qualität aber, da keine grosse
Dynamik gefordert wird.
Die Hauptvorteile der Spannungs-Frequenz-Kennlinienverfahren sind die relativ geringe Empfindlichkeit auf Änderungen der Maschinenparameter und die einfache Einstellung der Kennlinien. Für eine gute Einstellung müssen nur wenige Parameter bestimmt werden - oft reichen sogar wenige Versuche.
145 6 Regelverfahren für Drehfeldmaschinen
Bild 6.12 zeigt zwei Verstellvorgänge ohne Last: im ersten Fall wird von Null auf
Nenndrehzahl und im zweiten von etwa einem drittel auf Nenndrehzahl gestellt. Die Verstellgeschwindigkeit ist so gewählt, dass etwa Nennstrom fliesst. Die Bilder demonstrieren deutlich die Schwierigkeiten im Bereich kleiner Drehzahlen. Die gewählte Kennlinie
entspricht dem Fall a) in Bild 6.9.
In
n
Mn
n
In
n
Mn
n
iS
S
S
me
Mme
iS
me
t
Mme
t
Bild 6.12. Drehzahlvariation einer leerlaufenden ASM mit Spannungs-FrequenzkennlinienSteuerung: links: Variation von Null auf Nenndrehzahl, rechts: von ca. 30% auf 100%
6.1.2 Strom-Rotorfrequenz-Steuerung der ASM
Bei ASM-Antrieben mit Drehzahlregelkreisen ist die mechanische Drehzahl me aus der
Drehzahlmessung bekannt. Aus der Regelabweichung können mit einem Drehzahl-Regler Sollwertsignale für Modulator und Stromrichter erzeugt werden. Zwei mögliche Ausgangsgrössen eines Drehzahlreglers mit denen sich bei gegebenem Fluss die im Weiteren
benötigten Grössen bestimmen lassen sind:
a) Der Sollwert für das Drehmoment Mme. Daraus lassen sich mit (6.6) die Sollwerte für
den Wirkstrom IR und die Rotorfrequenz R bestimmen.
b) Direkt der Sollwert für die Rotorfrequenz R. Mit (6.5) lässt sich daraus der Wirkstrom IR berechnen.
Auf beide Arten lassen sich anschliessend die Statorfrequenz des Stromrichters und der
Statorstrom über lineare Zusammenhänge so führen, dass die Magnetisierung, d.h der
Fluss immer mit dem Sollwert überein stimmt.
Die Verfahren haben gegenüber der einfachen Spannungs-Frequenzsteuerung Vorteile,
benötigen aber eine Drehzahl- und eine Stromregelung:
- sie stimmen im ganzen Drehzahlbereich, insbesondere auch um Null herum,
- sie sind unempfindlich auf Änderungen des Statorwiderstandes,
- es tritt kein Kippen mehr auf (das maximale Moment ist aber thermisch begrenzt).
Die Regelstruktur in Bild 6.13 mit der Rotorfrequenz als Ausgangsgrösse des Drehzahlreglers soll genauer betrachtet werden:
6.1 Drehzahlregelung der Asynchronmaschine 146
Stromrichter
Steuersignale
IS,Ist
DFM
Fluss-Sollwert
+
S,Soll
Modulator
M
Stromregler
IS
-
IS,Soll StromKennlinie
+
h,Soll
Tacho
p
pme
+
R,Soll
PI(D)
-
nist
+ nSoll
Drehzahlregler
Bild 6.13. Blockdiagramm von Drehzahlregler und Strom-Rotorfrequenz-Steuerung
Aus dem drehzahlabhängigen Sollwert für den Fluss =f(S)und dem Sollwert für den
Wirkstrom IR aus (6.5) kann der Sollwert für den Statorstrom IS bestimmt werden. Für
den Magnetisierungsstrom gilt I m = h L h ; Magnetisierungs- und Wirkstrom haben
eine gegenseitige Phasenlage von 90 Grad, d.h. sie müssen geometrisch addiert werden.
Es resultiert für den Regelkreisblock ‘Stromkennlinie‘ die Funktion in (6.8) bzw. der Verlauf in Bild 6.14 links.
2
2
2
I S = h 1 Lh + R R R = I m 1 + R Lh R R
2
(6.8)
Der Flusssollwert muss abhängig von der Drehzahl so geführt werden, dass der Stromrichter immer genügend Spannungsreserve hat, um den Strom zu stellen. Reserve muss
dabei auch für die dynamischen Vorgänge eingeplant werden.
Bild 6.14 rechts zeigt den simulierten Hochlauf einer leerlaufenden ASM von Null auf
Nenndrehzahl bei Nennstrom. (Modell einer ASM mit Stromspeisung Bild 4.27.) Wie bei
der Spannungs-Frequenz-Kennliniensteuerung bleibt auch hier der Fluss nicht konstant,
er stabilisiert sich aber wesentlich besser und schneller. Die Abweichung beim Auf- und
Abbau des Stromes erklärt sich folgendermassen: Damit in der Maschine ein Drehmoment auftritt, muss eine Stromkomponente rechtwinklig zum Fluss vorhanden sein. Bei
der vorliegenden Steuerung werden die Rotorfrequenz und der Statorstrom verstellt. Der
richtige Winkel zwischen Fluss und Wirkanteil des Stromes muss aber durch die Integration der Rotorfrequenz zuerst gebildet werden. Bis zu diesem Zeitpunkt stimmen in der
Maschine Magnetisierungs- und Wirkstrom nicht. Dies ist einleuchtend, wurden doch die
Beziehungen in (6.5) und (6.6) für den stationären Betrieb hergeleitet.
Bemerkung: Die Zeitkonstante Lh/RR für eine Strom-Rotorfrequenzsteuerung lässt
sich in guter Näherung aus den Typenschilddaten und einer Leerlaufmessung bestimmen:
Mit Im = Leerlaufstrom, IN= Nennstrom und RN = Nenn-Rotorfrequenz folgt:
2
L
I
1
R = ------h- = ------------- -----N- – 1
RR
R N I m
(6.9)
147 6 Regelverfahren für Drehfeldmaschinen
In
In
n
Mn
n
S
iS
IS=f(R)
M
R,n
R,n
n
t
Bild 6.14. Strom-Rotorfrequenz-Kennlinien-Steuerung der ASM:
links: Strom-Rotorfrequenz-Kennlinie für konstanten Fluss,
rechts: Drehzahlvariation von Null auf Nenndrehzahl einer leerlaufenden Maschine
6.1.3 Direkte Flussführung
Bei Kennlinienverfahren, wie den besprochenen Spannungs- und Strom-Frequenzsteuerungen, wird der Fluss in der Maschine gesteuert. Insbesondere das dynamische Verhalten dieser Flussführungen, und in der Folge des ganzen Antriebes, genügt hohen Ansprüchen nicht. Bei hochstehenden Antrieben wird deshalb auch der Fluss geregelt. Dazu existieren eine Reihe von Ansätzen. Diese lassen sich in ‘direkte’ und ‘indirekte’ Flussführungen unterteilen. Wie die Namen andeuten, wird bei den direkten Verfahren der Fluss
ohne Umwege auf dem direktest möglichen Weg beeinflusst. Bei den indirekten Verfahren wird er über mehrstufige Regelkreise geführt. Bei den Fluss- oder Feldorientierten
Regelungen ist dies typischerweise ein unterlagerter Stromregelkreis. Für die verschiedenen Verfahren wird auch die Bezeichnung ‘Vektorregelung’ verwendet.
6.1.3.1 Prinzip der direkten Statorfluss- und Momentregelung
Bei der direkten Fluss- und Momentregelung werden die Regelkreise für Fluss und Drehmoment, zusammen mit dem eigentlichen Modulator, auf einfache Weise in eine einzige
Funktionseinheit zusammengefasst, wie das in Bild 6.15 dargestellt ist.
Ausgangspunkt für das Verfahren ist die Statorflussverkettung S, die unter Beizug der
dynamischen Gleichungen der ASM aus den Statorgrössen berechnet werden kann
(6.10):
S = u S – R S i S dt
(6.10)
Mit Hilfe von S und iS kann schliesslich das (innere, elektrische) Drehmoment Mel bestimmt werden (6.11):
3
3
M el = --- Im S i S = --- S , i S , – S , i S ,
2
2
(6.11)
6.1 Drehzahlregelung der Asynchronmaschine 148
Stromrichter
ASM
Zustand kZ
UVW
Flusssteuerung
|S,Soll|
+
n-Regler
nSoll +
nIst
| S|
-
PI(D)
-
Mel
Mel,Soll
+
-
S
+
UVW
uS
-
Tacho
iS
RS
(3/2)Im (S*iS)
Bild 6.15. Blockdiagramm einer direkten Fluss- und Momentregelung
Die beiden Regelgrössen S und Mel sind so durch Klemmengrössen bestimmbar, wobei
von den Maschinenparametern nur der Widerstand der Statorwicklung RS bekannt sein
muss. Im Bereich genügend grosser Drehzahl kann zudem der Spannungsabfall RSiS häufig vernachlässigt werden.
Im weiteren ist von Bedeutung, dass das Drehmoment eine Funktion der Rotorkreisfrequenz R ist, der Differenz zwischen der Drehzahl und der Statorkreisfrequenz (6.12).
M el = F R
mit
R 0 M el 0
R 0 M el 0
(6.12)
Bei Drehzahlregelungen ist es sinnvoll, die Beziehung (6.12) in die Form (6.13) umzuwandeln.
S ,Soll = F M el Soll , me mit
M el Soll 0 S p me
M el Soll 0 S p me
(6.13)
Für ein positives Moment muss also die Statorkreisfrequenz grösser als die mit der Polpaarzahl multiplizierte Drehzahl sein und für ein negatives Moment kleiner.
Das Regelverfahren besteht nun darin, dass die Statorflussverkettung auf konstantem Betrag S,Soll | gehalten und mit der dem gewünschten Drehmoment entsprechenden Kreisjt
frequenz S,Soll rotiert wird: S = S Soll e . Da der Stromrichter nur diskrete Ausgangsspannungen einstellen kann, ist der in Bild 6.16 links dargestellte Idealfall nur für
die kurzzeitig gemittelten Grössen möglich. In praktischen Realisierungen wird deshalb
für die Länge des Flusszeigers ein Toleranzband um den Sollwert herum vorgegeben, wie
149 6 Regelverfahren für Drehfeldmaschinen
S,Soll
S
S,Soll
Bild 6.16.
Führung der Statorflussverkettung bei einer
Asynchronmaschine,
links: ideal,
rechts: realer Verlauf bei
Stromrichterspeisung
im Bild rechts dargestellt. Die momentane Kreisfrequenz des Zeigers und damit das momentane Drehmoment hängt vom eingestellten Schaltzustand ab. Mit (6.10) lässt sich die
Bewegungsrichtung und die Geschwindigkeit des Flusszeigers angeben. Geht man davon
aus, dass der Spannungsabfall am Statorwiderstand klein ist, so sind diese Grössen allein
durch den eingestellten Spannungszeiger kU bestimmt (6.14):
d S
----------- = u S – R S i S ,
dt
RS 0
d S
k
----------- = u S = U
dt
(6.14)
Ist ein Nullzustand eingestellt, so bedeutet dies ein Stillstand des Flusszeigers. Diese
Stellen sind in Bild 6.16 rechts durch einen Punkt gekennzeichnet. Da dort die Kreisfrequenz des Flusszeigers momentan null ist, ergibt sich eine von der Drehzahl abhängige
negative Rotorkreisfrequenz (6.14):
k = 0 7
S = 0,
R = – p me
(6.15)
Ist ein spannungsbildender Zustand eingestellt, so wird dieser jeweils so gewählt, dass er
eine möglichst tangentiale Bewegung des Flusszeigers verursacht. Bei einer Kreisbewegung des Flusses gilt u S = d S dt = j S S . Somit ergibt sich für die entsprechende
Kreisfrequenz näherungsweise (6.15):
k = 1 6
k
k
U
U ------------------- S ----- S Soll
S
k
U
R = S – p me --------------------- – p me
S Soll
k
2
U = --- U d (6.16)
3
Damit im Mittel wahlweise ein positives oder ein negatives Drehmoment entwickelt werden kann, muss der Betrag der momentane Kreisfrequenz S auf jeden Fall grösser als
der von pme sein. Dies wird durch eine richtige Auslegung des Stromrichters erreicht
(genügend Spannungsreserve). Durch abwechslungsweises Anlegen von Nullzuständen
und spannungsbildenden Zuständen wird der kurzzeitig gemittelte Wert von S seinem
6.1 Drehzahlregelung der Asynchronmaschine 150
Sollwert angepasst. Das Drehmoment reagiert dabei nicht unmittelbar auf Sprünge von
R, sondern mit einer Verzögerung, wie dies in Bild 6.17 skizziert ist. Diese Tatsache
R
Mel
uStr=1...6U
uStr=0/7U
t
Mel,Soll
t
Bild 6.17.
Qualitativer Drehmomentverlauf in einer
Asynchronmaschine bei schrittartigen Änderungen der Rotorfrequenz
kann aus den Gleichungen für die ASM abgeleitet werden. Sie lässt sich aber auch einfach begründen mit der Feststellung, dass der Statorstrom wegen der Induktivitäten in der
Maschine auf einen Spannungssprung nur verzögert reagiert. Da die Schaltzeitintervalle
gegenüber den entsprechenden Zeitkonstanten klein sind, ergibt sich der dargestellte
sägezahnförmige Drehmomentverlauf.
Die direkte Flusssteuerung stellt ein sehr einfaches feldorientiertes Regelverfahren dar.
Es stellt über die Momentregelung automatisch die richtige Rotorkreisfrequenz ein, ohne
dass die Drehzahl der ASM bekannt sein muss. Das Verfahren ist ausserdem robust und
leicht implementierbar, da ausser RS keine der zum Teil betriebsabhängigen Maschinenparameter verwendet werden. Die einzige Information über den Betriebszustand der Maschine liefert der Statorstrom. In Ergänzung zum dargestellten Prinzip sind die folgenden
Feststellungen von Bedeutung:
- Im Bereich sehr kleiner Drehzahlen kann R bei angelegtem Nullzustand nur einen
kleinen negativen Wert erreichen, was einen langsamen Abbau des Drehmomentes zur
Folge hat. Um die Dynamik der Regelung zu erhöhen, kann in diesem Betriebsbereich
anstelle des Nullzustandes ein anderer spannungsbildender Zustand angelegt werden,
der den Flusszeiger nicht nur stillstehen lässt, sondern sogar rückwärts bewegt.
- Der Bereich kleiner Drehzahlen ist jedoch in der Praxis ohnehin problematisch. Der
Anteil der Statorspannung, der zur Flussbildung beiträgt, ist klein und die Berechnung
der Statorflussverkettung über die Integration wird ungenau. Deshalb wird normalerweise in diesem Betriebsbereich ein anderes Regelverfahren verwendet.
Da für die Drehmomentregelung eine Strommessung sowieso vorhanden ist, bietet sich
zum Beispiel eine Strom-Rotorfrequenzsteuerung nach Kapitel 6.1.2 an.
- Die Bestimmung der Statorspannungen in Bild 6.13 kann durch eine Messung erfolgen. Die Spannungen bzw. der Spannungszeiger uS können aber auch mit Hilfe des angelegten Schaltzustandes und der als konstant angenommenen Zwischenkreisspan-
151 6 Regelverfahren für Drehfeldmaschinen
nung berechnet werden. Soll deren Welligkeit in der Regelung mitberücksichtigt werden, so kann dazu auch die gemessene Zwischenkreisspannung verwendet werden.
- Eine Feldschwächung lässt sich einfach durch Reduktion von |S,Soll| erreichen.
- Die direkte Fluss- und Momentregelung kann auch bei Synchronmaschinen eingesetzt
werden.
Vergleich mit einer Spannungs-Frequenz-Kennliniensteuerung: Die beiden Verfahren sind sich ähnlich: Im einen Fall wird das Integral der Spannung geführt, sodass Betrag und Winkel (in guter Näherung) dem gewünschten Fluss entsprechen. Im andern Fall
wird die Spannung in Funktion der Frequenz so eingestellt, dass der Flussbetrag im stationären Betrieb dem gewünschten Sollwert entspricht.
Das gewünschte Drehmoment wird in beiden Fällen über die Kreisfrequenz erzeugt:
Drehen Spannung bzw. Fluss schneller als die mechanische Drehzahl, so entsteht ein positives Moment, andernfalls ein negatives. Die Statorströme stellen sich entsprechend
frei ein, im stationären Betrieb gilt (6.8).
6.1.3.2 Direkte Selbstregelung der ASM
Die direkte Selbstregelung (DSR) stellt einen Spezialfall der direkten Fluss- und Momentregelung dar [Dep1], [Dep2], [Jen1]. Bei Antrieben mit grosser Leistung muss die
Schaltfrequenz des Stromrichters möglichst klein gehalten werden. Dies wird durch entsprechend grosse Toleranzbänder für den Fluss erreicht. Zusätzlich wird genutzt, dass die
Drehmomentwelligkeit bei Antrieben die grössere Rolle spielt als die Welligkeit der Statorflussverkettung. Letztere beeinflusst den Betrieb eigentlich nur dadurch, dass sie zu
einer kleinen Reduktion der maximalen Fluss-Grundschwingungsamplitude zwingt, damit das Eisen zu keinem Zeitpunkt in starke Sättigung gerät. Es ist deshalb sinnvoll, mit
der zur Verfügung stehenden Schaltfrequenz in erster Linie die Drehmomentwelligkeit
klein zu halten.
Vergrössert man das Toleranzband für den Flussbetrag |S|, so geht die Schaltfrequenz
des entsprechenden Komparators zurück. Bereits bei einer maximalen Abweichung von
6.75% vom Sollwert kann der Verlauf des Flusszeigers, wie in Bild 6.18 links dargestellt, zu einem Sechseck degenerieren. In zyklischer Folge wird mit jedem der spannungsbildenden Zustände eine Seite des Sechseckes durchfahren. Die Ecken entsprechen
den Übergängen auf den nächsten Zustand. Sie liegen jeweils in der Mitte der Sektoren
SI bis SVI.
Der in Bild 6.18 links dargestelle Verlauf von S kann mit einer einfachen Regelung
realisiert werden. Dazu werden in Bild 6.18 die Hilfsachsen uv, vw und wu eingeführt.
Sie liegen in der Richtung der entsprechenden verketteten Spannungen uUV, uVW, und
uWU. Die Integrale der verketten Spannungen ergeben die zugehörigen Flüsse in gleicher
Richtung, d.h. UV, VW, und WU. Die Schaltschwellen xy,Soll werden auf den Nennwert des verkettenten Flusses gesetzt. Beim Erreichen der Schwelle wird auf den nächsten Zustand geschaltet. Dieser ist zusätzlich zur Schwelle noch durch die Drehrichtung
6.1 Drehzahlregelung der Asynchronmaschine 152
SIII
SI
wu
oll
U,S
UV
,So
ll
uv
SVI
SVI
SI
SV
ll
SV
SIV
UV
,So
uStr=2U
SII
S
vw
VW,Soll
uv
W
S
SIV
wu
VW,Soll
uStr=3U
ll
SII
o
U,S
13.5%
vw
W
SIII
Bild 6.18. Links: Ortskurve der Zeigerspitze für die Statorflussverkettung bei der DSR
Rechts: Hilfsachsen und Flussschwellen für die Zustandsumschaltungen
bestimmt, wie in Tabelle 6.1 dargestellt. Ohne eingeschaltete Stillstände des Flusszeigers
(Nullzustände) entspricht dies der Grundfrequenzsteuerung, d.h. der Durchmesser des
Sechsecks und die Geschwindigkeit des Flusszeigers sind fest vorgegeben.
Die zusätzliche Drehmomentregelung nach Bild 6.20 erlaubt die Variation der mittleren Kreisfrequenz des Flusszeigers, indem sie zwischendurch nach Bedarf Nullzustände
einlegt. Die trapezförmigen Verläufe der phasenbezogenen Flusskomponenten können
dadurch bei gleichbleibender Amplitude in der Zeitachse gedehnt werden.
Um die Schaltfrequenz tief zu halten, werden die Nullzustände jeweils so gewählt, dass
nur ein Schalter betätigt werden muss, z.B. im Zustand 1Z der Schalter U.
Drehrichtung:
Gegenuhrzeigersinn
Uhrzeigersinn
Schaltbed. Zust. sU sV sW Aktion Zust. sU sV sW Aktion
-VW
1Z
1
-1
-1 sW= -1
4Z
-1
1
1
sW=+1
UV
2Z
1
1
-1 sV= +1
5Z
-1
-1
1
sV=-1
-WU
3Z
-1
1
-1
sU= -1
6Z
1
-1
1
sU= +1
VW
4Z
-1
1
1
sW= +1
1Z
1
-1
-1 sW= -1
-UV
5Z
-1
-1
1
sV=-1
2Z
1
1
-1 sV= +1
WU
6Z
1
-1
1
sU= +1
3Z
-1
1
-1
sU= -1
Tabelle 6.1.
Schalttabelle
für eine DSR
(ohne Nullzustände)
Zur Vervollständigung des Blockschaltbildes der DSR im Vergleich zu Bild 6.15 wären
in Bild 6.20 die Blöcke zur Erfassung der Statorspannungen und -ströme sowie zur Berechnung des Drehmomentes zu ergänzen.
Die beschriebene Realisierung der direkten Selbstregelung hat eine sehr einfache
Form, die aber bei der Realisierung Probleme bereiten kann:
153 6 Regelverfahren für Drehfeldmaschinen
uWU
WU
sU
uUV
2|verk|Soll
uUV
UV
sV
2|verk|Soll
uVW
VW
||Soll
t
sV
sU
UV
VW
t
WU
sW
t
-||Soll
2|verk|Soll
Bild 6.19. Flussregelung bei der DSR ohne Nullzustände,
links: Blockdiagramm, rechts: Verläufe der Phasengrössen
uWU
Flusssteuerung
uUV
uVW
k=1...6
kU
uUV
t
k=0/7
||Soll
||Soll
UV
Mel,Soll
+
-||Soll
Mel,Ist
VW
WU
t
Bild 6.20. Erzeugung der Schaltsignale bei der DSR,
links: Blockdiagramm, rechts: Verläufe der Phasengrössen
- Der Start bei Fluss Null muss so definiert werden, dass der Fluss aufgebaut und anschliessend der ganze Ablauf ‘zu drehen‘ beginnt.
- In den Ecken der Sechsecke besteht die Möglichkeit, dass zwei Schaltschwellen miteinander ansprechen. In diesen Fällen muss drehrichtungsabhängig entschieden werden, welcher Zustand den Fluss in die richtige Richtung weiter bewegt. Die entsprechende erweiterte Umschaltlogik ist in Tabelle 6.2 aufgestellt.
Die Flusskomponenten auf den drei Hilfsachsen uv, vw und wu lassen sich mit (6.17)
auch aus den -Komponenten bestimmen, falls die Regelung in -Koordinaten aufgebaut wird.
x UV = 3 – 2 ;
x VW = ;
x UV = – 3 – 2
(6.17)
6.1 Drehzahlregelung der Asynchronmaschine 154
Drehrichtung:
Zustand
Gegenuhrzeigersinn
Uhrzeigersinn
1Z
– VW UV
VW – WU
2Z
UV – WU
– UV VW
3Z
– WU VW
WU – UV
4Z
VW – UV
– VW WU
5Z
– UV WU
UV – VW
6Z
WU – VW
– WU UV
Tabelle 6.2.
Erweiterte
Schalttabelle
6.1.4 Rotorflussorientierte Regelung der ASM
Der Ausdruck ‘Flussorientiert’ beschreibt die Lage des Koordinatensystems für die
Raumzeiger-Beschreibung der Maschine. Statt statorfest (), oder starr mit dem Rotor
mitdrehend (dq) wird das Koordinatensystem auf einen Maschinenfluss orientiert (xy).
Grundsätzlich kann das der Stator-, der Haupt- oder der Rotorfluss sein. Im stationären
Betrieb dreht das xy-Koordinatensystem synchron mit den Klemmengrössen (S) mit.
Bei diesen Fluss- oder Feldorientierten Regelungen wird der Fluss mit Hilfe eines unterlagerten Stromregelkreises geregelt; es sind somit indirekte Regelverfahren.
Die verschiedenen Verfahren werden auch als ‘Vektorregelungen’ bezeichnet.
Maschinenmodell: Sehr handliche Verhältnisse für die Regelung ergeben sich, wenn die
ASM in einem xy-Koordinatensystem beschrieben wird, welches auf die Rotorflussverkettung R ausgerichtet ist. Das Koordinatensystem wird so gelegt, dass der Flusszeiger
auf der x-Achse liegt und der Anteil auf der y-Achse Null wird: R = R x (Bild 6.21).
Y
x
R(t)
R(t)
Bild 6.21.
xy-Koordinatensystem und Flusszeiger bei
Rotorfluss-Orientierung
Für die Herleitung des Modells werden die Gleichungen der ASM so dargestellt, dass
sich Drehmoment und Rotorfluss durch die Statorströme beschreiben lassen (6.25). Dazu
wird von der Maschinenbeschreibung im mit K rotierenden Koordinatensystem ausgegangen. Die benötigten Gleichungen sind (6.18), (6.19) und (6.20).
155 6 Regelverfahren für Drehfeldmaschinen
u R = R R i R + d R dt + j K – p me R
(6.18)
R = Lh iS + L R i R
(6.19)
3pL
M me = ------- ------h Im R i S
2 LR
(6.20)
Der Rotorstrom in (6.18) wird durch den Statorstrom und den Rotorfluss aus (6.19) ersetzt. Weiter wird von einer Käfigläufermaschine ausgegangen, d.h. uR= 0. Auflösen der
Gleichung nach dem Statorstrom ergibt schliesslich (6.21).
d R
1- + j – p
i S = R ---- -----R- + -----R- -----------;
K
mech L
L
L h dt
h
h
L
R = ------RRR
(6.21)
Im nächsten Schritt wird verwendet, dass der Zeiger des Rotorflusses auf der x-Achse des
xy-Koordinatensystems liegt, d.h. R = R x , und damit die y-Komponente des Rotorflusses null ist. Die Gleichung für den Statorstrom wird in ihre Komponenten zerlegt:
R d R x
1- + ----i S x = R x ----- ---------------L h L h dt
3 p Lh
M me = ------- ------
i
2 L R R x S y
1 i L – dt
R x = ----R x
R S x h
2M me L R 1
i S y = --------------------- -----------3 pL h R x
i S y = R x K – p me -----RLh
i S y L h
1
me = --- K – ----------- -----p
R x R
(6.22)
(6.23)
(6.24)
- Der Rotorfluss ist nur noch eine Funktion der x-Komponente des Statorstromes (6.22).
Die Gleichung für den Rotorfluss beschreibt eine Tiefpassfunktion erster Ordnung. Der
entsprechende Regelkreis kann einfach realisiert werden.
- Aus (6.20) resultiert die Gleichung (6.23) für das Drehmoment Mme. Bei festem Fluss
R,x ist das Drehmoment nur noch durch iS,y bestimmt. In einem Regelkreis ist der
Stromsollwert iS,y,Soll schliesslich über den Faktor 2L R 3 pL h R x durch den Drehmoment-Sollwert Mme,Soll bestimmt.
- Die mechanische Drehzahl me lässt sich aus der Kreisfrequenz K des Koordinatensystems und der y-Komponente des Statorstromes (6.24) berechnen.
R
= f i S x ;
M me = f R xX i S y ;
me = f R X K i S
(6.25)
6.1 Drehzahlregelung der Asynchronmaschine 156
Für die Berechnungen muss nun als erstes die Frequenz des Koordinatensystems K bestimmt werden. Mit dem Ansatz, dass der Rotorflusszeiger R immer auf der x-Achse
des Koordinatesystems liegt, ist gegeben, dass Fluss und Koordinatensystem die gleiche
Frequenz haben. Aus dem Winkel des Rotorflusses R, lässt sich durch Differenzieren K bestimmen (6.26).
d R t dt = K
(6.26)
Die Berechnung der Drehzahl durch einfaches Differenzieren des Flusswinkels ist in der
Praxis heikel, da der berechnete Fluss meist starkes Rauschen aufweist. Zudem ist der berechnete Winkel eine Sägezahnfunktion, deren Differenzieren ebenfalls anspruchsvoll
ist. Einen verbesserten Ansatz haben C. Meier / R.Schlumpf in ihrer Bachelorthesis hergeleitet: Berechnet werden die Flusszeiger 1 und 2 in zwei aufeinanderfolgenden Abtastzeitpunkten im Abstand t. Über die Flächenberechnung einmal mittels Vektorprodukt und einmal über die Parallelogramm-Gleichung folgt (6.27).
1 x 2 y – 1 y 2 x
= asin ----------------------------------------------
1 2
(6.27)
Für die Kreisfrequenz K resultiert daraus direkt (6.28).
1 x 2 y – 1 y 2 x
K = ---------- = asin ---------------------------------------------- t
t
1 2
(6.28)
Es bleibt nun die Frage, wie R bestimmt werden kann. Eine messtechnisch Erfassung
des Flusses im drehenden Rotor ist mit sinnvollem Aufwand nicht praktisch machbar.
Deshalb wird der Rotorfluss aus messbaren Klemmengrössen mittels eines ‘Flussrechners’ ermittelt.
Flussrechner: Die Grössen |R| und R (t) der Rotorflussverkettung werden im
‘Flussrechner’ aus den gemessenen Statorspannungen und -strömen sowie der Drehzahl
nachgebildet. Aus den Gleichungen der Maschine in (4.59) und (4.77) lässt sich der Fluss
R in -Koordinaten aus messbaren Klemmengrössen bestimmen.
2
L
L
R = ------R u S – R S i S dt – ------i S
Lh
Lh
2
2
mit L = L S L R – L h
(6.29)
Das Blockdiagramm zu (6.29) zeigt die obere Hälfte von Bild 6.22. Die Nachführung
dieses Modells so, dass es immer möglichst gut mit der Maschine übereinstimmt, ist anspruchsvoll: Die offene Integration führt zum ‘Weglaufen’ des Flusses. Eine mögliche
Abhilfe dafür ist die einfachen Rückkopplung der Integration über den Faktor g. Die In-
157 6 Regelverfahren für Drehfeldmaschinen
tegration wird damit zu einem Tiefpass mit der Grenzfrequenz g. Der Preis dafür ist ein
Amplituden- und Phasenfehler des Flusses bei kleinen Drehzahlen - dieser ist aber oberhalb der Winkelgeschwindigkeit 10g vernachlässigbar.
Stimmen die Maschinenparameter nicht genau (Temperatur, Ersatz des Motors) so
wirkt sich dies vor allem bei kleinen Drehzahlen stark aus. Für kleine Drehzahlen müssen
deshalb die Maschinendaten entweder genau ermittelt werden, oder die Regelung muss
sie selbst ermitteln. Für das Zweite sind selbstadaptierende Modell-Strukturen nötig, die
schnell einmal komplexe Verfahren verlangen.
uS,
iS,
+
RS
-
R
S
LR/Lh
1/s
g
+
abs
R
-
atan
(R)=K
L2/Lh
e-j
xy
iS,xy
d/dt
Im
*
/
K´
LhRR/LR
+
-
1/p
me´ (nme´)
iS,xy
Bild 6.22. Oben: Flussrechner; unten: Drehzahlberechung
Gemäss (6.24) kann aus dem Phasenwinkel des Rotorflusses R und dem Statorstrom
iS die mechanische Kreisfrequenz me' beziehungsweise die Drehzahl nme' berechnet
werden. Damit ist es möglich, eine Drehzahlregelung ohne direkte Drehzahlmessung zu
realisieren. Da der berechnete Fluss verwendet wird, kann das Verfahren bei kleinen
Drehzahlen zu Schwierigkeiten führen: Für exakte Regelungen wird meistens eine ‘echte’ Drehzahlmessung notwendig.
Struktur der Regelung: Der Flussregler ergibt direkt den Sollwert für die flussbildende
Komponente des Statorstromes iS,x,Soll. Der Ausgang des Drehzahlreglers entspricht dem
einzustellenden Drehmoment MSoll. Nach der Division durch |R| und einer Skalierung
mit K = 2L R 3 pL h liegt der Sollwert für die drehmomentbildende Stromkomponente
iS,y,Soll vor. Die resultierende Regelstruktur entspricht der Struktur einer geregelten
Gleichstrommaschine: Drehmoment und Fluss werden getrennt geregelt. Mit der Variation des Betrages von R ist selbstverständlich auch Feldschwächung möglich.
Die unterlagerten Stromregelkreise, zusammen mit dem Modulator, können grundsätzlich in allen 3 Formen nach Kapitel 5.7.1 ausgeführt sein. In der vorliegenden Struktur in
Bild 6.24 sind sie im flussorientierten xy-Koordinatensystem ausgeführt. Dabei wird der
Referenzwinkel R(t) des rotierenden, auf R orientierten xy-Koordinatensystems zur
6.2 Drehzahlregelung der Synchronmaschine 158
i S, u S
Stromrichter
Steuersignale
|R,Soll|
+
-
nSoll
+
n-Regler
-
iS,x,Soll
-Regler
MSoll
K
UVW
Modulator
Stromregler,
ZeigeriS,y,Soll transformation
iS,
iS,xy
R=K
nIst
uS,
Flussrechner
für R
R|=R,x
|R|
nIst
UVW
ASM
nIst'
Bild 6.23. Struktur der rotorflussorientierten Regelung einer ASM
iS,x,Soll
+
iS,y,Soll
K=
PI
xy
- iS,x,Ist
+
PI
- i
S,y,Ist
Modulator
Zeigertransformation und im Modulator als Referenzwinkel gebraucht. Das verwendete
Modell für die Stromregelung beschreibt (5.65).
iS,,Ist iS,x,Ist
Stromrichter
und
iS,,Ist
iS,y,Ist
Maschine
xy
ej
e-j
Bild 6.24. Struktur Stromregler und Zeigertransformation
6.2 Drehzahlregelung der Synchronmaschine
Mit Synchronmaschinen (SM) werden drehzahlvariable Antriebe in einem sehr grossen
Bereich gebaut: Am untere Ende der Skala sind es Leistungen von weniger als einem
Watt, während das obere Ende von Antrieben im Bereich gegen 100MW belegt ist.
Der elektrische Aufbau von drehzahlvariablen Antrieben mit Synchronmaschinen ist
grundsätzlich identisch zu dem mit Asynchronmaschinen - abgesehen von der Maschine
selbst. Bei fremderregten SM kommt zusätzlich noch ein Stromrichter für die Erregung
des Polrades (Rotors) dazu. Die möglichen Regelkonzepte sind in ihrer Grundstruktur
zwangsläufig gleich wie bei den ASM. Aufgrund der Tatsache, dass Statorfrequenz und
mechanische Drehzahl synchron sind, lassen sich aber reine Drehzahlsteuerungen mit
SM genauer realisieren.
159 6 Regelverfahren für Drehfeldmaschinen
Im Sinne einer Auswahl werden anschliessend die folgenden Ansätze für die Regelung
der Synchronmaschine betrachtet:
- Kennlinienverfahren zur direkten Drehzahlsteuerung in der Form einer SpannungsFrequenz-Steuerung, analog wie bei der Asynchronmaschine.
- Kombinationen von Drehmomentsteuerung und überlagerter Drehzahlregelung:
Das Drehmoment ist abhängig von Betrag und Phase des Statorstromes. Zwei Fälle mit
praktischer Bedeutung sollen betrachtet werden: Der Betrieb mit minimalem Strom
und derjenige mit minimaler Klemmenblindleistung.
Die Drehzahl selbst wird mittels eines überlagerten Drehzahlreglers eingestellt.
- ‘Bürstenlose Gleichstrommaschinen’. Bei diesen speziellen Bauformen der SM wird
der Winkel zwischen Polrad und Statorstrom lastunabhängig konstant gehalten.
Für die betrachteten Konzepte werden Stromrichter als Spannungs- oder als Stromquelle
benötigt wie sie schon früher eingeführt wurden.
6.2.0.1 Feldschwächung bei SM
Bei konstanter Erregung ist die vom Polrad im Stator der SM induzierte Spannung proportional zur Drehzahl. Werden die Amplituden der Klemmenspannungen konstant gehalten, und nur die Frequenz und damit die Maschinendrehzahl erhöht (z.B. durch antreiben der Welle im Generatorbetrieb), so steigt die Spannungsdifferenz über den StatorStreuinduktivitäten an, und führt zu grossen Statorströmen. Deshalb muss oberhalb der
maximalen Stromrichterspannung die Maschine mit Feldschwächung betrieben werden.
Dies ist bei SM grundsätzlich auf zwei Arten möglich:
a) Naheliegend ist die Reduktion der Erregung und damit der Polradspannung bei fremderregten Maschinen durch die Reduktion des Erregerstromes.
b) Über den Statorkreis kann ein Magnetfeld aufgebaut werden, welches eine Spannung
so induziert, dass sie der Polradspannung entgegen wirkt. Damit ist auch bei konstanter
Erregung (Permanentmagnet-Maschinen) eine Feldschwächung möglich. Die Kompensation der Polradspannung ist anspruchsvoll und erfordert schnell grosse Ströme.
Geht die Kontrolle über das System verloren, kann der Stromrichter zerstört werden,
wenn die Maschine zu grosse Spannungen und damit Ströme generiert.
Die für die Feldschwächung notwendigen Ströme mit den zugehörigen Verlusten reduzieren den Wirkungsgrad der SM bei dieser Betriebsart!
6.2.1 SM-Darstellung für verschiedene Regelkonzepte
Für die Einführung der verschiedenen Konzepte werden zugunsten der Übersichtlichkeit
zum Teil Vereinfachungen angesetzt. Die spezifischen Einschränkungen werden jeweils
zu Beginn der jeweiligen Abschnitte vorgestellt. Die Erweiterung der Konzepte in Richtung von SM mit allen Ausprägungen und Betriebsarten ist mit entsprechendem Aufwand jederzeit möglich.
6.2 Drehzahlregelung der Synchronmaschine 160
Weiter wird hier immer von Maschinen ohne Dämpferwicklung ausgegangen. Für diese gelten (6.30), (6.31) und (6.32):
d
u d = R S i d + ----------d- – el q ;
dt
d
u q = R S i q + ----------q- + el d
dt
d = L d i d + L dE i E = L d i d + 0 ;
q = Lq iq
3p
3p
M me = ------- i q d – i d q = ------- i q 0 + i d i q L d – L q
2
2
(6.30)
(6.31)
(6.32)
Stationärer Betrieb: Für die einfachen Regelkonzepte wird wie bei der ASM vom quasistationären Betrieb ausgegangen. Dies beinhaltet Verhältnisse, während denen zumindest für kurze Zeitspannen:
- die mechanische Drehzahl konstant ist und p me = S gilt. S ist damit auch die
Drehzahl des dq-Koordinatensystems für die Maschinendarstellung,
- alle transienten Vorgänge abgeklungen sind und eventuelle Dämpferwicklungen nicht
in Erscheinung treten,
- die Erregung konstant ist (Erregerstrom konstant oder Permanentmagnet erregt),
- in der dq-Darstellung Ströme und Spannungen konstante Gleichgrössen sind und ihre
Ableitungen entsprechend Null sind d dt = 0 .
Mit den gemachten Voraussetzungen und u P = j S 0 resultieren (6.33) und (6.34):
ud = RS id –S Lq iq ;
uq = RS iq + S Ld id + u P
3p
3 p uP
M me = ------- i q d – i d q = ------- ------i
+ id iq Ld – Lq
q
2
2 S
(6.33)
(6.34)
Bei einer Vollpolmaschine gilt L d = L q und aus (6.33), (6.34) folgen (6.35) und (6.36).
ud = RS id –S Ld iq ;
uq = RS iq + S Ld id + u P
uP
M me = 3------p- i q d – i d q = 3------p- ------i
2
2 S q
(6.35)
(6.36)
161 6 Regelverfahren für Drehfeldmaschinen
Die entsprechende Darstellung der Maschine in Bild 6.25 beschreibt mit L d L q eine
Schenkelpolmaschine, beziehungsweise mit L d = L q eine Vollpolmaschine. Die Darstellung der Vollpol-SM lässt sich gemäss Bild 6.26 weiter vereinfachen.
uq
ud
iq
id
RS
ui,q SLdid+uP
RS
Bild 6.25.
dq-Darstellung der SM im stationären Betrieb.
Schenkelpolmaschine: L d L q ,
Vollpolmaschine: L d = L q .
ui,d -SLqiq
uZ
iS
uS
RS
u S‘
Ld
uP
Bild 6.26.
Vereinfachte Darstellung der Vollpolmaschine
Zeigerlängen und Amplituden der Klemmengrössen: Im stationären Betrieb entsprechen die Zeigerlängen den Scheitelwerten der harmonischen Klemmengrössen. Bei gegebenen Spannungs- und Stromzeigern sind somit Amplituden und damit auch die Effektivwerte der Klemmengrössen sehr einfach bestimmt (6.37).
û U V W = u S ;
î U V W = i S
(6.37)
6.2.1.1 Bestimmung der Polradlage (t)
Um die Beziehungen zwischen dem dq-Simulationsmodell und den dreiphasigen Klemmengrössen herzustellen, muss der Winkel (t) bekannt sein, welcher die Lage des Polrades bezüglich des Stators beschreibt. Die einfachste Möglichkeit ist die Messung mittels eines Polrad-Lagegebers. Dafür können verschiedenste analoge oder digitale Geber
oder Resolver eingesetzt werden, die an die Achse der SM montiert werden.
Der Winkel kann auch aus den Stator-Klemmengrössen berechnet werden (6.38). Dazu
wird die Maschine in -Koordinaten dargestellt und der Polradfluss berechnet. Der
Winkel des Flusses entspricht der gesuchten Polradlage. Rauschen auf den Messungen
von Strömen und Spannungen, sowie wegdriften der Integratoren, machen die Berechnung anspruchsvoll! Wie beim Flussrechner bei ASM (6.30) kann das Wegdriften der Integratoren mit einer schwachen Rückkopplung verhindert werden.
6.2 Drehzahlregelung der Synchronmaschine 162
0 = u S – R S i S dt – L d i S
(6.38)
0 = u S – R S i S dt – L d i S
0 = atan 0 0
Ist (t) bestimmt, so erfolgt die Umrechnung zwischen Klemmen- und dq-Grössen mit
den bekannten Koordinatentransformationen aus Kapitel 4.3.2.2, wie in Bild 6.27 dargestellt.
PolradLagegeber
e-j
xU
xV
xW
3Ph
x
x
xd
xq
DFMModell
ej
yd
yq
dq
dq
y
y
yU
yV
3Ph
yW
Bild 6.27. Koordinatentransformation zwischen Klemmengrössen und dq-Beschreibung
6.2.2 Spannungs-Frequenz-Steuerung
Der Betrieb der SM an einem Spannungszwischenkreis-Stromrichter mit SpannungsFrequenz-Steuerung entspricht dem Betrieb am starren Netz. Im Unterschied zur ASM
ist die Wellendrehzahl durch die Statorfrequenz exakt bestimmt, solange die Maschine
nicht überlastet wird, d.h. nicht kippt. Dies erlaubt den Bau von sehr einfachen drehzahlgesteuerten Antrieben ohne Regelung. Die dynamischen Anforderungen dürfen allerdings nicht hoch sein: Einerseits können sie nicht erfüllt werden und andererseits besteht
die Gefahr, dass die Maschine bei Laststössen pendelt oder gar kippt. Bei nicht korrekter
Einstellung der Statorspannung kann auch schnell viel Blindleistung fliessen.
Bei einfachen Spannungsführungen in Funktion der Statorfrequenz wird die Belastung
der Maschine nicht berücksichtigt, die Amplituden der Statorspannungen werden nur in
Funktion der Frequenz gestellt. Von den verschiedenen möglichen Ansätzen sollen zwei
diskutiert werden. Ausgegangen wird vom quasistationären Vollpol-Maschinenmodell.
6.2.2.1 Statorspannung gleich der Polradspannung
Die Amplituden der Klemmenspannungen werden proportional zur Drehzahl geführt:
û U V W = u P = S 0 . Bei unbelasteter Maschine stellt sich das Polrad so ein, dass das
Drehmoment null wird, d.h. kein Strom fliesst. Dies entspricht einem Polradwinkel von
null Grad. (Praktisch wird dieser Fall aufgrund der unvermeidlichen Verluste nur bei angetriebener Maschine erreicht). In diesem Betriebspunkt bezieht die Maschine keine
Blindleistung. Bei Belastung verdreht sich das Polrad so weit aus der Nullage, bis das
163 6 Regelverfahren für Drehfeldmaschinen
notwendige Drehmoment auftritt. Die q-Komponente des Stromes ist durch (6.39) bestimmt. Der Stromrichter wird mit Blindleistung belastet.
2- M
me S
i q = ----------------------3 p uP
(6.39)
Der resultierende Polradwinkel der Blindstrom und der gesamte Statorstrom iS lassen
sich mit Hilfe des Zeigerdiagrammes in Bild 6.28 ermitteln (bei Vernachlässigen des
ohmschen Spannungsabfalls gilt u S u L q = u S i q S L d = sin ).
uRd uL(q)
uL(d)
q
uRq
uZ
uS
uP
uZ
iS
iS
iq
id
uS
E
RS
u S‘
Ld
uP
d
Bild 6.28. Zeigerdiagramm der Vollpolmaschine bei betragsmässig identischen Klemmen- und
Polradspannungen.
Im Stillstand, bei S = 0 , ist so kein Strom und damit kein Drehmoment möglich, da die
Statorspannung null ist. Bei höheren Drehzahlen dagegen funktioniert die Methode gut.
6.2.2.2 Statorspannung für ‘minimalen’ Statorstrom
Bei einer Spannungsführung auf id = 0 wie in Bild 6.29 wird der Statorstrom bei einer
Vollpolmaschine für ein gegebenes Drehmoment minimal, da dieses ja nur durch iq erzeugt wird. (Bei einer Schenkelpolmaschine liegt er in der Nähe des Minimums.)
Da die Belastung im allgemeinen Fall ja nicht bekannt ist, wird nachfolgend die Spannung so geführt, dass die vorhergehende Voraussetzung bei Nennmoment (Index n) erfüllt ist. Für iq in Funktion des Drehmomentes gilt (6.40) und für die Spannung (6.41).
2 M me n
2 M me n
i q n = ------- -----------------------S- = ------- ---------------3p
3 p 0 n
uP
u d = – S L q i q n ;
u q = R S i q n + S 0
(6.40)
(6.41)
6.2 Drehzahlregelung der Synchronmaschine 164
uL(q)
uZ
uS
q
uRq
uP
uZ
iS
iq=iS
uS
E
RS
u S‘
Ld
uP
d
Bild 6.29. Zeigerdiagramm der Vollpolmaschine mit Polradspannung und Statorstrom in Phase
Mit dieser Spannungsführung steht überall genügend Spannung für Nennmoment zur
Verfügung. Bei Schwachlast wird der Strom aber grösser als notwendig, die Maschine
bezieht Blindleistung.Wird im Stillstand die Statorspannung so eingestellt, dass sie dem
Spannungsabfall über RS bei Nennstrom entspricht, so lässt sich auch in diesem Betriebsfall Nennmoment erreichen - aber nicht mehr. Deshalb soll der Strom in diesem Betriebspunkt so hoch wie möglich gewählt werden, ohne dass die Maschine überlastet wird. Mit
den beiden Grenzfällen: Spannungsbedarf im Stillstand und Spannungsbedarf bei Nenndrehzahl lässt sich analog wie bei der ASM eine Spannungs-Frequenzkennlinie bestimmen, wie das schematisch in Bild 6.30 dargestellt ist.
US
US,n
Nennbereich:
IE=IE,n= konst
Feldschwächbereich:
IE~ 1/S
IE~0,n
b
,IE
US
a
S,n
S
Bild 6.30.
Spannungs-Frequenz-Kennlinien der SM:
a) ohne Berücksichtigung der Belastung
b) mit Kompensation der Belastung,
gezeichnet für maximale Belastung
6.2.2.3 Erweiterungen und Bemerkungen
Wie schon bei der ASM diskutiert, kann die Spannungs-Frequenzführung bei Verwendung weiterer Informationen über den Maschinenzustand verbessert werden. Stehen die
Statorströme als Messgrössen zur Verfügung, so kann damit die Statorspannung bei steigendem Strom erhöht werden (Mitkopplung). Es besteht aber die Gefahr von Stabilitätsproblemen, wenn die Mitkopplung zu stark ist.
165 6 Regelverfahren für Drehfeldmaschinen
Spannungsführung für minimale Statorblindleistung: Wird bei der Synchronmaschine bei konstanter Belastung und Polradspannung der Betrag der Statorspannung variiert,
so ändert die Blindleistung: Ist die Statorspannung zu klein, so eilt der Strom vor, ist sie
zu gross, so eilt er nach. Die Blindleistung an den Statorklemmen wird Null, wenn reine
Wirkleistung fliesst, d.h. der cos = 1 ist.
Der Winkel el zwischen Statorspannung und -Strom kann messtechnisch bestimmt
werden: Die Phasenlage der Spannung ist von der Ansteuerung des Stromrichters her bekannt, der Strom muss aus Sicherheitsgründen sowieso gemessen werden. Aus der Phasenverschiebung kann das Korrektursignal für die Statorspannung gewonnen werden.
Auf diese Art lässt sich die Statorspannung für minimale Statorblindleistung führen.
Sie bedingt bei höheren Drehzahlen nur eine kleine Anpassung der Statorspannung in
Funktion der Belastung. Bei tiefen Drehzahlen dagegen wird der Einfluss des ohmschen
Stator-Widerstandes signifikant und entsprechend eine Anpassung gross.
6.2.3 Drehzahlregelung mit unterlagerter Momentsteuerung
In der gleichen Art wie bei den Gleichstrom- und ASM-Antrieben, lassen sich auch bei
Antrieben mit Synchronmotoren gute und einfache Drehzahlregelungen realisieren,
wenn das Drehmoment (schnell) auf einen vorgegebenen Sollwert eingestellt werden
kann. Das gewünschte Moment wird dabei nicht über eine Regelung sondern eine Steuerung eingestellt, da sonst eine Drehmomentmessung notwendig würde, was sich kaum je
rechtfertigen liesse. Der Drehmomentsteuerung wird für die Drehzahlregelung ein Drehzahl-Regelkreis überlagert, wie in Bild 6.31 schematisch dargestellt.
SM
Stromrichter
uS iS
Steuersignale
Steuersatz
Drehmomentsteuerung
Winkelgeber
Tacho
me
MSoll
DrehzahlRegler
-
nIst
+
nSoll
Bild 6.31.
Blockdiagramm eines SM-Antriebes mit Drehmoment- und überlagertem Drehzahl- Regler
Bei den meisten SM-Antrieben wird der Statorstrom iS mittels eines Stromregelkreises
so geführt, dass das gewünschte Drehmoment resultiert. Diese Bauformen soll anschliessend genauer betrachtet werden. (Grundsätzlich könnte das Drehmoment auch mittels einer direkten Führung von Statorspannung uS und Polradwinkel Winkels zwischen Sta-
6.2 Drehzahlregelung der Synchronmaschine 166
tor- und Polradspannung) gestellt werden. Diese Variante hat aber in dieser Form kaum
praktische Bedeutung.)
Pendelneigung, Kippen: Wird bei einem SM-Antrieb, bestehend aus einem Motor und
einem fest gekoppeltem Massenträgheitsmoment, das Drehmoment fest vorgegeben, so
ist er grundsätzlich nicht mehr schwingfähig. (Praktisch können immer noch Schwingungen auftreten: Ein Regelkreis kann ungeschickt ausgelegt sein oder der mechanische
Kreis enthält Elemente, welche die Funktion einer Feder übernehmen. Dies kann z.B.
eine Achse sein, die als Torsionsfeder wirkt.)
Wird zusätzlich der Sollwert des Drehmomentes so begrenzt, dass von Maschine und
Stromrichter nie mehr verlangt wird, als sie liefern können, so kann der Antrieb auch
nicht mehr überlastet werden.
6.2.3.1 Statorstrom in Funktion des Drehmomentes
Der Stromrichter mit Spannungszwischenkreis wird zusammen mit der Maschine und
einem Stromregelkreis zur dreiphasigen Stromquelle erweitert, bei der Amplitude, Frequenz und Phase der Ausgangsströme einstellbar sind, wie das in Kapitel 5.5 vorgestellt
ist. Die Geschwindigkeit mit welcher sich der Strom eingestellen lässt, ist nur noch abhängig von der Güte der ‘Stromquelle’ und der zur Verfügung stehenden Spannungsreserve des Stromrichters. Bei einer Schenkelpolmaschine wird für die Drehmomentführung nur Gleichung (6.32) benötigt. Die Maschinenbeschreibung wird damit sehr einfach.
Für die Momentsteuerung wird zusätzlich die Winkelposition me des Polrades benötigt. Dazu ist entweder ein Winkel- / Drehzahlgeber an der Maschine notwendig, oder der
Winkel muss aus anderen Grössen bestimmt werden, z.B. aus den Maschinenspannungen
und -strömen.
Drehzahlregelungen mit unterlagertem Momentenregelkreis sind sehr robust. Eventuelle Nichtidealitäten im Momentregelkreis stören im (meistens) langsameren äusseren
Drehzahlregelkreis kaum.
Eventuelle Dämpferwicklungen verzögern den Auf- und Abbau des Drehmomentes.
Muss ein Moment hochdynamisch und exakt eingestellt werden, so sind unter Umständen bessere Verfahren zur Stromführung notwendig, die auch den Einfluss von Dämpferwicklungen modellieren. Solche lassen sich aus der Zeigerdarstellung der Maschine herleiten.
Freiheitsgrade für die Stromführung: Das Drehmoment der Vollpolmaschine ist nur
durch die q-Komponente des Stromes bestimmt. Die d-Komponente kann grundsätzlich
beliebig gewählt werden. Zwei naheliegende Formen der Stromführung werden betrachtet:
167 6 Regelverfahren für Drehfeldmaschinen
- Der Statorstrom wird so geführt, dass sein Betrag minimal ist. Damit ist die thermische
Belastung der Statorwicklungen die Kleinstmögliche. Die Maschine bezieht aber
Blindleistung, die vom Stromrichter aufgebracht werden muss.
- Eine zweite Möglichkeit ist, die Statorblindleistung immer auf Null zu halten. Der
Strom ist dabei nicht minimal, dafür aber die Scheinleistung an den Statorklemmen.
Daneben sind grundsätzlich beliebige weitere Stromführungskonzepte möglich.
6.2.3.2 Minimaler Statorstrom
Für ein gegebenes Drehmoment wird der Statorstrom der Vollpolmaschine minimal,
wenn der Strom iS bezüglich der Flussverkettung um den Winkel 2 verdreht ist,
d.h. i S = i q und entsprechend i d = 0 sind (6.42).
i S = i q = 2 3 p M me 0
(6.42)
Im stationären Betrieb ist die Phasenlage des Stromes bezüglich der Polradspannung uP
Null beziehungsweise (6.43).
i S = i q = 2 3 p M me el u P
(6.43)
Die Statorspannung für den stationären Betrieb lässt sich mit Hilfe von Ersatzschaltung
und Zeigerdiagramm in Bild 6.32 bestimmen. Da der Strom in Phase zur Polradspannung
ist, addiert sich der ohmsche Spannungsabfall über RS skalar zur Polradspannung.
uLd
q
uRS
uZ
el
uS
uP
uZ
iS
iq = iS
0
uS
RS
u S'
Ld
uP
d
Bild 6.32. Zeigerdiagramm im stationären Betrieb bei Stromführung auf minimalen Statorstrom
Der Winkel el zwischen Statorspannung und -strom entspricht dem Polradwinkel -.
(Bei positivem Polradwinkel eilt der Strom der Statorspannung nach.) Er variiert in
Funktion des Drehmomentes: Die Maschine benötigt lastabhängig Blindleistung entsprechend (6.44). Diese muss vom Stromrichter aufgebracht werden.
6.2 Drehzahlregelung der Synchronmaschine 168
2
2
Q S = 3 2 u Ld i S = 3 2 i S S L d = 3I S S L d
(6.44)
Strom und Winkelführung für diesen Betriebsfall sind einfach und robust. Theoretisch
sind beliebig grosse Drehmomente möglich. Der Wirkungsgrad der Maschine ist der
grösst mögliche, wenn man davon ausgeht, dass die Verluste nur in RS auftreten.
Diese einfache Drehmomentsteuerung benötigt keine aufwendigen Berechnung der
Stromkomponenten: Im Nennbereich ist die Beziehung Strom zu Drehmoment eine Konstante. Das Verfahren wird deshalb sehr häufig eingesetzt.
Schenkelpolmaschine: Die Stromführung auf minimalen Statorstrom bei der Schenkelpolmaschine kann aus den beiden Gleichungen (6.45) und (6.46) hergeleitet werden.
M me = 3 p 2 0 i q + i d i q L d – L q
2
2
(6.45)
2
iS = id + iq
(6.46)
Bei minimalem Statorstrom gilt für das Verhältnis zwischen id und iq (6.47). Die Gleichungen für die ganze Stromführung werden dabei so umfangreich, dass die Werte mit
Vorteil als Kennlinie abgespeichert und dann im Betrieb ausgelesen werden.
2
0
0
+ i2
i d = – -------------------------+ -------------------------q
2 L – L
2 Ld – Lq
d
q
(6.47)
6.2.3.3 Minimale Statorblindleistung
Damit die Stator-Blindleistung null wird, muss der Statorstrom in Phase mit der Statorspannung sein. Betrachtet wird das Zeigerdiagramm einer Vollpolmaschine im stationären Betrieb in Bild 6.33.
q
uZ
uRS
uLd
u‘S
uS
uP
uZ
iS
id
iS
iq
0
uS
RS
u S‘
Ld
uP
d
Bild 6.33. Zeigerdiagramm bei Stromführung auf reine Wirkleistung an den Statorklemmen
169 6 Regelverfahren für Drehfeldmaschinen
Die innere Wirkleistung, d.h. ohne die Verluste über dem Statorwiderstand RS lässt sich
mit (6.48) erfassen. Damit ist die q-Komponente des Statorstromes bestimmt.
P me = M me me = 3 2 u P i q
M me me
M me
2P me
i q = 2--- --------------------- = 2--- ----------= -----------3 uP
3 0
3u P
(6.48)
Für die Summe der Blindleistungen gilt in diesem Betriebspunkt (6.49).
2
3 2 2
Q = 3
--- i S S L d + i d u P = --- i d + i q S L d + i d u P = 0
2
2
(6.49)
Einsetzen von iq aus (6.48) in (6.49) und auflösen liefert (6.50).
u P 2 2 S M me p 2
uP
i d = – ---------------- ---------------- – -----------------------------
3u P
2 S L d
2 S L d
(6.50)
Damit sind die beiden Stromkomponenten für Statorblindleistung Null in Funktion des
Drehmomentes bestimmt. Sind für die Stromführung Betrag und Winkel bezüglich der
q-Achse verlangt, so lassen sich diese einfach aus den Komponenten rechnen (6.51).
iS =
2
2
id + iq ;
= atan – i d i q
(6.51)
Wird der Wurzelausdruck in (6.50) kleiner null, so resultiert keine reelle Lösung mehr.
Die gestellte Bedingung, dass keine Blindleistung bezogen wird kann deshalb nur bis
zum maximalen Moment in (6.52) erfüllt werden.
2
3
3 p uP 2
M me = --------- -----= ---------04L d S
4L d
(6.52)
Der Statorstrom der Maschine ist für ein gegebenes Drehmoment nicht minimal. Dadurch kann der Wirkungsgrad nicht maximal werden. Die Berechnung der Stromführung
auf minimale Statorblindleistung kann kaum mehr im Betrieb gemacht werden. Sinnvoll
ist die Tabellierung und das Auslesen der Stromkomponenten in Funktion des gewünschten Drehmomentes.
Schenkelpolmaschine: Wird die Gleichung für die Blindleistung auf die Schenkelpolmaschine erweitert (6.53), so kann analog wie bei der Vollpolmaschine die Stromführung
berechnet werden.
2
3 2
Q = --- i d S L q + i q S L d + i d u P = 0
2
(6.53)
Die Berechnung wird noch aufwendiger als bei der Vollpolmaschine. Entsprechend muss
auch hier mit Tabellen gearbeitet werden.
6.3 Elektronisch kommutierte Maschinen 170
6.3 Elektronisch kommutierte Maschinen
Für die elektronisch kommutierten Maschinen werden verschiedene Bezeichnungen verwendet: ‘EK-Motoren’ (EK-M), ‘EC-Motoren’ (EC-M), ‘bürstenlosen Gleichstrommaschinen’ (b-GM) oder ‘brushless DC-motors’. Die Bezeichnung ‘bürstenlosen Gleichstrommaschine’ basiert auf dem Verlauf der magnetischen Flussdichte im Luftspalt der
Maschine: Er ist gleich wie bei den Gleichstrommaschinen in Bild 6.34. Zusätzlich verlaufen die Speiseströme näherungsweise rechteckförmig. Die Funktion des Kollektors
bei der GM, d.h. die Kommutierung der Ströme von einer Wicklung auf die nächstfolgende, übernimmt bei der EK-M ein Stromrichter. Als EK-M werden Antriebe kleiner
und mittlerer Leistung mit Speisung aus einem Spannungszwischenkreis realisiert. Sie
sind sehr ähnlich zu den aus einem Stromzwischenkreis gespeisten Stromrichtermotoren
mit Thyristor-Umrichtern (LCI: load comutated inverter), wie sie für grosse bis sehr
grosse Leistungen seit Jahrzehnten gebaut werden. Die prinzipiellen Unterschiede zwischen den eng verwandten Antrieben: Permanentmagnet (PM) erregten Synchronmaschinen, Stromrichtermotoren und elektronisch kommutierten Maschinen (b-GM) zeigt
die Zusammenstellung in Tabelle 6.3.
Tabelle 6.3. Elektronisch kommutierte - versus spezielle Synchronmaschinen-Antriebe
EK-M
PM-erregte SM
Stromrichter- SM
Erregung
Permanent-Magnet Permanent-Magnet i.a. fremderregt
magn. Flussdichte
rechteckförmig
sinusförmig
sinusförmig
im Luftspalt
Statorströme
rechteckförmig
sinusförmig
rechteckförmig
6.3.1 Aufbau der Gleichstrommaschinen
Zur Herleitung der Bauform werden die beiden Gleichstrommaschinen in Bild 6.34 betrachtet: Beim Standardaufbau im Bild links wird das Feld im Luftspalt durch die Erregerwicklung erzeugt. Vor allem bei kleineren Maschinen kann die Funktion der Erregerwicklung durch Permanent-Magnete (PM) übernommen werden, wie in der Figur rechts
gezeichnet. Der Maschinendurchmesser wird dabei bei gleichen Rotorabmessungen und
gleicher Leistung kleiner.
Der Verlauf der magnetischen Flussdichte B, der durch die Erregung bzw. die PM erzeugt wird, ist in beiden Fällen näherungsweise identisch.Vor allem ist sie im Bereich der
Polschuhe konstant. Der ideale Strombelag i' auf der Rotoroberfläche ist im Bereich der
Polschuhe ebenfalls konstant. In den Wicklungen, die gerade nicht unter den Polen liegen, wird die Strompolarität umgedreht (z.T. zusätzlich mit Hilfe von Wendepolen). Damit bleibt bei drehender Maschine der Strombelag auf der Rotoroberfläche bezüglich des
Stators stehen, bezüglich des Rotors dreht er entgegen der mechanischen Drehrichtung.
171 6 Regelverfahren für Drehfeldmaschinen
Stator
Polschuh
ErregerWicklung
N
(t)
IA
UA
Ankerwicklung
(t)
IA
Rotor
(Anker)
Permanentmagnete
UA
Bürsten
S
Kommutator
(Stromwender)
Bild 6.34. Gleichstrommaschinen: links: fremderregt,
rechts: mit Permanentmagneten erregt
Diese ‘Kommutierung’ des Rotor-(gleich-)-Stromes wird mit Hilfe des Kommutators
und der Bürsten gemacht. Die Verhältnisse sind qualitativ in Bild 6.35 illustriert. Die
drehmomentbildenden auftretenden Schubkräfte im Luftspalt (Grundgleichung pro Leiter: F = B i l ) sind proportional zum Strombelag und zur Flussdichte und unter den
Polschuhen konstant. Das Drehmoment in Funktion des Drehwinkels ist im Idealfall konstant. Bei konstanter Geschwindigkeit wird in jeder Wicklung unter den Polen die gleiche
Spannung induziert. Im Übergangsbereich zwischen den Polen wechseln die Flussdichte
B, der (ideale) Strombelag i'und die induzierte Spannung ui das Vorzeichen.
B
i‘
B
i'
Bild 6.35. Flussdichte Bim Luftspalt und idealisierter Strombelag i'auf dem Kollektor der konventionellen (gestrichelt) und der bürstenlosen Gleichstrommaschinen (ausgezogen)
Schwachstellen der konventionellen Gleichstrommaschinen: Kommutator und Bürsten sind Verschleissteile, sie erzeugen Geräusche und hochfrequente elektromagnetische Störungen. Sie können nicht bis zu beliebigen Drehzahlen verwendet werden und
bieten auch Probleme bezüglich des Schutzart der Maschine wegen der auf dem Kommutator auftretenden Funken. Weiter tritt die vom Ankerstrom IA erzeugte Abwärme im
Rotor auf, wo sie schlecht nach aussen abgeführt werden kann.
6.3 Elektronisch kommutierte Maschinen 172
6.3.2 DFM mit rechteckförmiger Flussdichte
Ausgehend von den Eigenschaften der Gleichstrommaschine ist der Schritt zu elektronisch kommutierten Maschinen offensichtlich: Die Erregung wird auf dem Rotor angebracht und die Wicklungen auf dem Stator wie in Bild 6.36 links dargestellt. Grundsätzlich kann eine beliebige Anzahl Wicklungen herausgeführt werden. Heute werden die
meisten Maschinen aber wie Standard-Drehfeldmaschinen 3-phasig ausgelegt. Dies erlaubt bei symmetrischen Verhältnissen den einfachst möglichen Stromrichter, der die
Funktion von Kommutator und Bürsten übernimmt. Für die Steuerung des Stromrichters
wird eine Messung des Rotorwinkels (t) und weitere Zusatzfunktionen benötigt. Die
Maschine wird durch den fehlenden Kollektor kürzer (die eventuell einzubauende Winkelmessung benötigt weniger Platz). Die Wärme aus der Wicklung im Stator lässt sich
besser nach aussen abführen. Da im Stator mehr Platz für die Wicklungen zur Verfügung
steht, können die Verluste zusätzlich mit grösseren Leiterquerschnitten reduziert werden.
Bei identischen Maschinen-Abmessungen ist die Leistung bei einer solchen Maschine
20%..50% grösser als bei konventionellen Gleichstrom- oder Asynchronmaschinen.
Bei der in Bild 6.36 links dargestellten EK-M sind die Permanentmagnete so ausgebildet, dass die Flussdichte im Luftspalt wie bei der Gleichstrommaschine näherungsweise
rechteckförmig verläuft. Die induzierte Spannung verläuft ebenfalls näherungsweise
rechteckförmig wie in Bild 6.37 dargestellt. Die im Bild rechts gezeichnete PM - erregte
Synchronmaschine hat prinzipiell den gleichen Aufbau. Durch speziell geformte Magnete, oder wie im Bild dargestellt Eisenpole, wird aber bei der SM ein sinusförmiger Induktionsverlauf im Luftspalt erzeugt. Bei drehender Maschine induziert dieser in den Statorwicklungen sinusförmige Spannungsverläufe. Entsprechend wird die PM - erregte Synchronmaschine vereinzelt auch als ‘bürstenlose Wechselstrommaschine’ bezeichnet.
(Keine Schleifringe und keine Bürsten für die Erregung.)
q
q
d
iS,V
(t)
uS,V
d
(t)
iS,V
iS,U
iS,W
Rotor
iS,V
uS,W
PermanentMagnete
iS,W
Stator
iS,U
iS,U
uS,U
iS,W
geblechter Stator
Bild 6.36. links: Aufbau einer elektronisch kommutierten Maschine;
rechts: Synchronmaschine mit Permanentmagnet - Erregung
Stator
173 6 Regelverfahren für Drehfeldmaschinen
ui
ui_b-GM
ui_SM
t
Bild 6.37. Induzierte Spannungen in den Statorwicklungen von bürstenlosen GM- und SM
Grundsätzlich können bei beiden Maschinentypen die gewünschten Verläufe der
Flussdichte mit ganz verschiedenen mechanischen Rotoraufbauten erzeugt werden: Die
Permanentmagnete können an der Oberfläche oder im Innern angebracht werden, die
Magnete rechteckige Platten oder speziell geformte Teile sein. Die Bauformen sind abhängig vom Einsatzgebiet der Maschine und von den Präferenzen der Hersteller.
Vergleich von Antrieben mit rechteck- und sinusförmiger Flussdichte im Luftspalt:
Angenommen wird, dass bei beiden Maschinen der gleiche Scheitelwert der ErregerFlussdichte vorliegt. Dies bedingt bei Rechteckform etwas mehr Eisen im Stator für den
Rückfluss. Auch wird mehr PM- Material notwendig. Bei identischen Wicklungspaketen
und gleichem Stromeffektivwert wird das Drehmoment bei rechteckförmiger Flussdichte
und rechteckförmigem Stromverlauf um etwa 45% grösser. Dies ist ein klarer Vorteil dieser Bauform, er wird aber mit teurem PM - Material bezahlt.
Wird der Vergleich für den gleichen magnetischen Fluss pro Pol (etwa gleich viel
PM - Material) und wieder bei gleichem Stromeffektivwert durchgeführt, so ist das Drehmoment bei rechteckförmigem Flussdichteverlauf etwa 5% kleiner. In diesem Fall kann
der Stator für beide Fälle vollständig identisch ausgelegt werden. In guter Näherung gilt,
dass Maschinen mit gleichviel Eisen, Kupfer und PM - Material bei gleichem Stromeffektivwert das gleiche Drehmoment erreichen.
Für die Vergleiche der Stromrichter Belastung werden die Scheinleistungen der jeweils 6 Schalter zusammengezählt. Betrachtet werden die Scheinleistung bezogen auf
die Effektivwerte (eff, rms) S = U eff I eff und die ‘Spitzenwert-Scheinleistung’ (‘peak’)
ŝ = ûî . Werden beide auf die Motorwirkleistung cos = 1 bezogen, resultieren die
Werte in Tabelle 6.4. Der Vergleich zeigt, dass die Elemente bezüglich der Spitzenwerte
sehr ähnlich ausgelegt werden müssen. Bezüglich der Effektivwerte, welche die Erwärmung der Elemente mitbestimmen, schneidet die Sinusstromform etwas besser ab. In
Realität sind aber die Unterschiede nicht sehr relevant: Im betrachteten Bereich kleiner
Leistungen kosten die kleinen Unterschiede in den Stromrichter-Scheinleistungen wenig.
Dazu kommt, dass die Stromrichter meistens auf kurzzeitige Überlast ausgelegt werden,
d.h. sowieso überdimensioniert sind.
Raumzeigerdarstellung von elektronisch kommutierten Maschinen: Die Raumzeigerdarstellung basiert unter anderem auf einem sinusförmigen Verlauf des Luftspaltflusses. Wie gezeigt, ist das bei der EK-M nicht erfüllt. Grundsätzlich wäre es möglich, die
6.3 Elektronisch kommutierte Maschinen 174
Tabelle 6.4. Stromrichter-Scheinleistung bezogen auf Motorleistung
Stromform/ Maschinentyp
Sinus / SM
Rechteck / b-GM
Effektivwerte (kVA/kW)
3.5
4.9
Spitzenwerte (kVA/kW)
6.9
6
rechteckförmige Flussdichte mittels einer Reihe von harmonischen Funktionen zu erfassen. Das resultierende Modell würde aber sehr unhandlich. Wenn die EK-M mit Raumzeigern beschrieben wird, so wird dies deshalb nur für die Grundschwingung, d.h. sinusförmigen Verlauf, von Luftspaltfluss und induzierter Spannung, gemacht.
Die bürstenlose GM kann durch den ‘unrunden’ Aufbau unterschiedliches Verhalten in
d- und in q-Richtung haben. Dies wird durch die dq-Ersatzschaltung in Bild 6.38 erfasst.
Sie ist identisch zu derjenigen einer PM - erregten Synchronmaschine. Entsprechend lassen sich beide Maschinen mit den gleichen Raumzeigergleichungen beschreiben (Kapitel
4.5.2). Die schwache dq-Ausprägung von bürstenlosen GM kann zur weiteren Vereinfachung genutzt werden, indem L d = L q gesetzt wird. Damit fällt jegliches Reluktanzmoment weg. (6.54) bis (6.57) sind so für beide Bauformen als Näherungen zulässig. Die
Ersatzelemente der bürstenlosen GM sind auf die gleiche Art zu bestimmen, wie die einer
PM-erregten Synchronmaschine.
uq
iq
RS
Ldq
ud
id
RS
Ldd
ui,q = pmed
ui,d = -pmeq
d
u d = R S i d + ----------d- – p me q ;
dt
Bild 6.38.
dq-Ersatzschaltung der vereinfachten bürstenlosen Gleichstrommaschine (Grundschwingung)
d
u q = R S i q + ----------q- + p me d
dt
(6.54)
d = Ld id + 0 ; q = Ld iq
(6.55)
3p
3p
M me = ------- i q d – i d q = ------- 0 i q
2
2
(6.56)
1
me = --- M me – M Last dt
J
(6.57)
175 6 Regelverfahren für Drehfeldmaschinen
Die vorgestellte näherungsweise Raumzeigerdarstellung der bürstenlosen GM hat in der
Praxis keine grosse Bedeutung. Die Maschine lässt sich für die übliche Betriebsart auf
eine einfachere Art beschreiben, wie dies nachfolgend gezeigt wird.
6.3.2.1 Anspeisung der Maschinen
Bei dreiphasigen bürstenlosen Gleichstrommaschinen können die Statorwicklungen in
Stern oder Dreieck geschaltet werden. Betrachtet wird eine Sternschaltung in der zeitkontinuierlichen Prinzipschaltung gemäss Bild 6.39.
id
Ud/2
Ud
Ud/2
mU
V
mV
W
uU
iU
U
uUV
uVW
iV
iW
mW
RU
LU
RV
LV
RW
LW
eU
eV
eW
Bild 6.39. Prinzip des Leistungskreises einer bürstenlosen GM
Angesteuert sind in diesem Zeitpunkt die Phasen U und V. W ist offen!
Wie bei der Gleichstrommaschine gezeigt, muss für ein konstantes Moment der Strombelag konstant bleiben. Das lässt sich am einfachsten mit rechteckförmigen Strömen in
den drei Wicklungen erreichen. Üblich sind die Stromsollwerte in Bild 6.40, bei denen
immer nur zwei Wicklungen bestromt sind. Die dritte Wicklung ist stromlos, d.h. im entsprechende Brückenzweig des Stromrichters sind beide Schalter ausgeschaltet. Der
Stromrichter wird als H-Brücke mit wechselnden Brückenzweigen betrieben. Wegen der
Streuinduktivitäten und ohmschen Widerständen weichen die realen Verläufe vor allem
bei steigenden Drehzahlen von der Rechteckform ab, da die Ströme ja nur mit einer begrenzten Geschwindigkeit auf und abgebaut werden können. Zusätzlich zeigen sich in
den Kommutierungszeitpunkten Rückwirkungen zwischen den einzelnen Wicklungen.
Die Maschinen sind so konstruiert, dass bei sauberen Rechteckverläufen das Moment
konstant ist. Somit tritt bei höheren Drehzahlen eine leichte Drehmomentwelligkeit auf.
iU,V,W
iU
iV
iW
Bild 6.40. Ideale Ströme für bürstenlose Gleichstrommotoren;
t
6.3 Elektronisch kommutierte Maschinen 176
6.3.2.2 Steuerung und Betriebsverhalten
Für maximales Drehmoment müssen die Ströme der Maschine so aufgeprägt werden,
dass der ideale Strombelag in den Windungen, die von den PM überdeckt werden, immer
konstant ist und in den Windungen, die zwischen den Polen liegen, die Strompolarität gewechselt wird. Die entsprechenden Verläufe von induzierter Spannung e und Strom i einer Phase entsprechen Bild 6.41. In der Klemmenspannung werden zusätzlich noch der
induktive Spannungsabfall bei der Kommutierung und der ohmsche Spannungsabfall
sichtbar, wie sie ebenfalls qualitativ eingezeichnet sind.
u
i
eu
uu
iu
t
maximale Stromrichterspannung
zum Auf- und Abbau der Ströme
Bild 6.41. Phasenspannung und -strom der bürstenlosen Gleichstrommaschinen
Für die innere Leistung, und entsprechend für das Drehmoment, gilt bei exakten 120
Grad Stromblöcken (6.58). Überstrichen bei Strom und induzierter Spannung bezeichnet
dabei die Scheitelwerte, ohne die dynamischen Spitzen für die induziert Spannung.
P me = 3 2 3 ei = 2ei;
M me = 2ei me
(6.58)
Sollen Spannung und Moment analog zur Gleichstrommaschine durch den ‘Fluss’ dargestellt werden, gilt (6.59).
e = me ;
M me = 2i
(6.59)
Für die Speisung der Maschine aus einem Spannungszwischenkreis werden dazu Stromregelkreise benötigt, wie in Kapitel 5.5 vorgestellt. Dies bedingt die Struktur nach Bild
6.42 mit einer Erfassung des Polradwinkels Statt mittels des gezeichneten Winkelgebers kann der Winkel auch aus den Statorgrössen der Maschine gerechnet werden. Damit
ist trotz der leicht unterschiedlichen Bauform das Funktionsprinzip der bürstenlosen
Gleichstrommaschine das einer stromrichtergespeisten Synchronmaschine, bei welcher
der Statorstrom fest in einer vorgegebenen Phasenlage zum Polrad vorgegeben wird, wie
das beispielsweise in Kapitel 6.2.3.2. beschrieben wurde.
Der Winkel zwischen Polrad und Statorstrom muss entsprechend den gewünschten Eigenschaften des Motors optimiert werden. Typischerweise wird identisches Verhalten der
Maschine in beiden Drehrichtungen angestrebt, d.h. Strom und Spannung in Phase (bzw.
180 Grad für Generatorbetrieb) wie in Bild 6.41 gezeichnet.
177 6 Regelverfahren für Drehfeldmaschinen
Stromrichter
‘EK-M‘
iL
Winkelgeber
Modulator
StromRegelung
-
+ DrehzahlRegler
Tacho
- nIst
+
nSoll
Bild 6.42.
Blockdiagramm eines EK-M-Antriebes mit Polradwinkel-Messung
und Drehzahlregler
Derart gesteuerte EK-M- oder PM-erregte Synchronmotoren zeigen das Verhalten von
fremderregten Gleichstrommotoren:
-
Statorspannung und Drehzahl sind proportional,
Drehmoment und Statorstrom sind proportional,
kein Pendeln, kein Kippen,
keine Statorblindleistung,
sehr gute Überlastbarkeit (üblich 3-fach, Spitzenwerte bis 10-fach; Grenzen: Entmagnetisierung und thermische Belastung von Maschine und Stromrichter).
Die aufgezählten Eigenschaften sind zusätzlich kombiniert mit dem Vorteil, dass ausser
den Lagern keine Verschleissteile vorhanden sind. Die in Bild 6.43 dargestellten Beziehungen zwischen Statorspannung, -strom, Drehmoment und Drehzahl illustrieren diese
Eigenschaften.
Feldschwächung: Bis zum Betriebspunkt me,n verlaufen Spannung und Drehzahl proportional. Darüber ist im Prinzip eine Feldschwächung möglich. Dazu muss die Phasenlage des Stromes gegenüber dem Polrad so variiert werden, dass eine Stromkomponente
auftritt, die dem Feld der Permanentmagnete entgegenwirkt. Dann ist das Drehmoment
auch nicht mehr proportional zum Strom. Die Betriebsart ist wie bei der PM-SM nicht
unproblematisch: Geht die Kontrolle über den Stromrichter verloren, so werden hohe
Spannungen induziert.
Einsatz von elekktronisch kommutierten Maschinen:
Einsatzgebiete von EK-M sind Anwendungen, bei denen die Eigenschaften, wartungsarm (-frei) bei hoher Leistungsdichte, notwendig sind. Das geht von Kleinstmotoren z.B.
in Disk-Antrieben über hochdynamische Anwendungen in Werkzeugmaschinen und Robotern bis zu Antriebsmotoren in Fahrzeugen.
Bemerkung: Von verschiedenen Herstellern sind integrierte Ansteuerungen für EK-M erhältlich, womit kleine Antriebe einfach aufgebaut werden können.
Literatur zu Kapitel 6.3: [Bro1], [Fis1], [Hen1], [Mll1], [Kir1]
6.3 Elektronisch kommutierte Maschinen 178
me = f(MLast)
bei uS = konstant
e, Mel
IS_n
iS
UStr_n
Mel_n
DrehmomentÜberlastbereich
e
Mel=Mel_n
maximale Drehzahl mit
‘Feldschwächung‘
bei IS_n
Mel
Induziert
Spannung e
Nennbereich
Spannungsstellbereich
me_n
DrehmomentNennbereich
me
Feldstellbereich
(Polradwinkel variiert)
Bild 6.43. Stationäre Kennlinien einer elektronisch kommutierten Maschine
A.1 Kennlinien verschiedener typischer Lasten 180
Teil II
Anhänge
A Grundlagen und Ergänzungen
Nachfolgend sind in loser Folge Grundlagen und Ergänzungen zusammengestellt.
A.1 Kennlinien verschiedener typischer Lasten
Die Lasten für rotierende Maschinen lassen sich nach verschiedenen Kriterien in Gruppen einteilen. Eine mögliche Form ist nach steigender Ordnung der Leistungsaufnahme,
wie in Bild A.1 bis Bild A.4 dargestellt.
Zwischen den dargestellten Fällen existieren selbstverständlich beliebige Mischformen.
1.In Bild A.1 sind die Belastungen dargestellt, wie sie beispielsweise bei Wickelantrieben auftreten. Ist die Zugkraft des Wickelgutes konstant, so ändert das Drehmoment
mit dem Durchmesser der Rolle. Ist auch die Abzugsgeschwindigkeit konstant, so
bleibt die Leistung dabei konstant. Drehmaschinen und Schälmaschinen mit konstant
gehaltener Schnittgeschwindigkeit zeigen ähnliches Lastverhalten.
Genau genommen muss von einem zeitabhängigen Lastverhalten gesprochen werden.
Pme
Mme
F = k; v = k
P=k
M=k/
r=var.
me
Bild A.1. Drehmoment sinkt umgekehrt proportional zur Drehzahl
me
181 A Grundlagen und Ergänzungen
2)Der Drehmomentverlauf in Bild A.2 ist sehr typisch für Hebezeuge. Bei kleinen Drehzahlen kann für das Losbrechen kurzzeitig noch ein grösseres Moment notwendig werden. Auch Antriebe in Walzwerken, Werkzeugmaschinen und Förderbänder können
dieses Verhalten zeigen.
Bei negativer Drehrichtung tritt in diesem Lastfall Energie-Rückspeisung auf:
’Generatorbetrieb’.
me
Mme
Pme
M=k
r
P=k
v
Last
me
me
Bild A.2. Drehmoment in etwa konstant
3)Bild A.3 zeigt Verläufe von Walzen und Glättmaschinen. Auch ein ohmsch belasteter
Generator zeigt diesen Verlauf.
r
me
Pme
Mme
M=k
P=k
v
me
me
Bild A.3. Drehmoment proportional zur Drehzahl
4)Lüfter, Zentrifugalpumpen und Fahrzeuge mit dominanter Luftreibung schliesslich
zeigen Drehmomentverläufe mit quadratischer Charakteristik.
Mme
Pme
M=k
P=k
me
me
Bild A.4. Drehmoment qadratisch zur Drehzahl
me
A.1 Kennlinien verschiedener typischer Lasten 182
A.1.1 Grössen der Asynchronmaschine in Funktion der Frequenz
Verschiedene Kenngrössen der Asynchronmaschine sind in Form einer qualitativen
Übersicht in Tabelle A.1 zusammengestellt. Betrachtet werden die Betriebsbereiche
Nennfluss und Feldschwächung. Der Feldschwächbereich wird weiter unterteilt in den
Bereich mit konstanter Leistung und den anschliessenden Bereich (oberhalb G) in dem
die Leistung durch das absinkende Kippmoment begrenzt wird. Für die Drehzahl G gilt
ausgedrückt durch das Nennkippmoment und das Nennmoment näherungsweise (A.1).
G n M K n M n
(A.1)
Tabelle A.1. Grössen der ASM in Funktion der Frequenz
Grösse
Verlauf der bezogenen Grösse
Feldschwächung
konstanter
Fluss
n
G
bezogene
Grösse
Drehzahl
/n
Spannung
U
U/Un
M = k
1
0
1
/n
/n
P2 = k
/n
1
P2 k
/n
1
0
Flussverkettung
/n
1
1
n/
n/
0
Strom I
I/In
1
1
1
G/
0
Drehmoment M
M/Mn
1
1
n/
1
n/
G/
0
Kippmoment Mk
Mk/Mk,n
1
n/
0
mechanische
Leistung
P2
P2/P2,n
1
0
/n
1
G/
183 A Grundlagen und Ergänzungen
Tabelle A.1. Grössen der ASM in Funktion der Frequenz
Grösse
Schlupf
s
Verlauf der bezogenen Grösse
Feldschwächung
konstanter
Fluss
n
G
bezogene
Grösse
s/sn
M = k
1
n/
P2 = k
P2 k
1
G/
1
G/
0
Stator-und RotorKupferverluste PCu1
Eisenverluste PFe
PCu1/PCu1,n
PCu2/PCu2,n
PFe/PFe,n
1
1
0
1
0
/n
n/
n/
A.2 Drehzeiger, Festzeiger und Raumzeiger 184
A.2 Drehzeiger, Festzeiger und Raumzeiger
Zur Beschreibung von elektrischen Systemen und Maschinen werden verschiedene Zeiger verwendet:
- Drehzeiger, die mit der Winkelgeschwindigkeit der dargestellten elektrischen Grösse
drehen. Das verwendete Koordinatensystem selber steht still.
- Festzeiger (phasor), die ebenfalls mit der Winkelgeschwindigkeit drehen, aber auf
ein Koordinatensystem bezogen sind, das mit der gleichen Geschwindigkeit dreht. Im
stationären Betrieb stehen die Zeiger bezüglich dem Koordinatensystem damit still.
- Raumzeiger (space vector), welche den räumlichen Aufbau einer Maschine mit modellieren. Im Normalfall drehen diese Zeiger im ’Raum’ der Maschine. Sie können aber
ebenfalls auf sich drehende Koordinatensysteme bezogen werden.
Die zweidimensionalen Zeiger werden in der komplexen Ebene als komplexe Zahlen
dargestellt. Die Achsen des Koordinatensystems sind entsprechend die reelle (Re) und
die imaginäre (Im) Achse. Teilweise werden die Achsen auch anders bezeichnet, z.B.
; d,q; x,y,... Die Darstellung der Zeiger als komplexe Zahlen ermöglicht die Verwendung der entsprechenden Rechenregeln, was ein sehr effizientes Arbeiten erlaubt.
A.2.1 Drehzeiger
Betrachtet wird die harmonische, zeitabhängige Grösse u(t) in (A.2):
u t = û sin t + u
(A.2)
u(t) entspricht direkt dem Imaginärteil des drehenden Zeigers u(t) in (A.3):
Im u t = Im ûe
j t + u
= ûIm e
j u jt
e
Dies lässt sich durch Einsetzen der Eulerschen Beziehung e
fach zeigen (A.4).
Im u t = Im ûe
j t + u
(A.3)
j
= cos + j sin ein-
= ûIm cos t + u + j sin t + u
(A.4)
= û sin t + u
Die vorgestellten Zusammenhänge illustriert Bild A.5. Spannungen und Ströme (und natürlich auch weitere Grössen) lassen sich darstellen, wie am Beispiel der Spannung vorgestellt. Ihr Momentanwert ist dabei immer die Projektion auf die imaginäre Achse. Als
Beispiel wird der Strom durch die Induktivität L betrachtet. Die anliegende Spannung sei
u t = û sin t + u . Im stationären Betrieb, d.h. nach Abklingen eventueller Einschwingvorgänge, resultiert für den Strom in verschiedenen Schreibweisen (A.5). Der
185 A Grundlagen und Ergänzungen
u
u(t)
û
Im
u
u(t=0)
t1
u(t)
u
t
t1
Re
2
Bild A.5. Zeitfunktion u(t) und korrespondierender Drehzeiger u(t).
Stromzeiger dreht mit der gleichen Winkelgeschwindigkeit wie der Spannungszeiger,
ist aber gegenüber diesem um den Winkel /2 nacheilend. Das Mitführen dieser Drehung
bei allen Grössen ist mühsam. Drehzeiger in der vorgestellten Form werden deshalb in
der Praxis nur wenig verwendet.
û
û j t + u – 2
i t = ------- sin t + u – --- = Im -------e
L
2
L
(A.5)
j t + u – j 2
û
û u j t
= ------- Im e
e
= Im ----------e e
jL
L
A.2.2 Festzeiger, komplexe Wechselstromrechnung
In den meisten stationären Anwendungen interessieren nicht die Momentanwerte, sondern die Effektivwerte der gleichfrequenten, harmonischen Grössen und deren gegenseitigen Phasenlagen. Die Drehung um t wird eliminiert, indem alle Grössen im gleichen
mit drehenden Koordinatensystem betrachtet werden. Das Koordinatensystem kann
dabei beliebig gelegt werden (Anfangswinkel K). Normalerweise wird es so gelegt, dass
eine der betrachteten Grössen direkt auf einer Achse liegt.
Definitionen:
X = Re X + jIm X = X e
j X
Festzeiger
j 2
j = 1e
= 1 2
X = atan Im X Re X
X = Re X – jIm X
Konjugiert komplexer Wert von X
X = x̂ 2
Effektivwert der Grösse x t = x̂ sin t + x
A.2 Drehzeiger, Festzeiger und Raumzeiger 186
Für die Beziehung zwischen Dreh- und Festzeiger gilt mit den Definitionen (A.6).
x =
2X e
jt
=
2X e
j X j
e
(A.6)
Die Festzeiger der verschiedenen Grössen stehen im stationären Betrieb still. Für die
Rechnung mit Festzeigern gelten die Rechenregeln für die komplexen Zahlen. Die am
meisten durchgeführten Operationen sind dabei Addition und Subtraktion.
Anwendung: Festzeiger sind das Hilfsmittel der Wahl für Berechungen in der Energietechnik, d.h. Erzeugung, Übertragung und Verbrauch von Energie. Sie sind das Fundament der komplexen Wechselstromrechnung. Dort werden neben Widerständen die Impedanzen von Induktivitäten und Kapazitäten benötigt (A.7).
1 - = – j ------1 -;
X C = ---------jC
C
(A.7)
X L = jL
Ein Beispiel ist die einfach RCL-Schaltung in Bild A.6 mit der Gleichung (A.8).
U e = U L + U C + U R = I jL – j C + R
(A.8)
Im Zeigerdiagramm wird der Strom I als einfache Variante auf die reelle Achse gelegt.
L
I
Ue
UL
Im
C
UC
UC
UL
R
I
UR
UC
Ue
UR
Re
Bild A.6. RLC-Schaltung mit Festzeiger-Diagramm
A.2.2.1 Leistungsberechnung mit Festzeigern:
Für die Berechnung von Leistungen muss die Definition des Vorzeichens der Blindleistung berücksichtigt werden: Ist der Strom gegenüber der Spannung nacheilend, so wird
die Blindleistung positiv. Damit resultiert für die komplexe Scheinleistung S, die Wirkleistung P und die Blindleistung Q, ausgedrückt durch die Festzeiger U und I (A.9).
S = U I = P + jQ = ReU + jImU ReI – jImI
P = Re U I = ReU ReI + ImU ImI = UI cos ui
Q = Im U I = ImU ReI – ReU ImI = – U I sin ui
(A.9)
187 A Grundlagen und Ergänzungen
A.2.3 Raumzeiger
Mit Raumzeigern wird beschrieben, welchen Einfluss elektrische und magnetische Grössen haben, die im ’Raum’, der radiale Schnittebene durch Stator und Rotor einer Maschine, wirken. Die Grössen greifen beim üblichen dreiphasigen symmetrischen Aufbau auf
drei um 120 Grad versetzten Achsen (u,v,w) ein. Es wird dabei angesetzt, dass der Einfluss jeder Achse über den Umfang der Maschine einen cosinusförmigen Verlauf hat, d.h.
Maximum und Minimum liegen auf der jeweiligen Achse. Zur Vereinfachung werden die
Einflüsse von den drei um 120 Grad versetzten Achsen auf ein zweiachsiges Koordinatensystem umgerechnet ( u v w ). Die Raumzeigerdarstellung ist ausführlich in
Kapitel 4.3 hergeleitet. Zusammengefasst gilt für -Koordinaten:
3Ph-Transformation: Für die Berechnung der Raumzeiger aus den Phasen- und
aus den verkettenten Grössen gilt (A.10).
x = 1 3 2x U – x V – x W ;
x = 1 3 xV – xW
x = 1 3 x UV – x WU ;
x = 1 3 x VW
(A.10)
3Ph- Transformation
Randbedingung für die Rücktransformation: Für die Rücktransformation von zwei auf
drei Grössen wird vorausgesetzt, dass die Summe von xU, xV und xW gleich Null ist. Damit wird die Rückrechnung von Zeiger auf Dreiphasengrössen nach (A.11) eindeutig.
Beachte vor allem: x = x U !
xU = x ;
x V = 1 2 3x – x ;
xW = 1 2 – 3 x – x
(A.11)
Anwendung: Raumzeiger sind das bevorzugte Hilfsmittel für die dynamische Beschreibung von Drehfeldmaschinen und Stromrichter sowie Steuer- und Regelverfahren dafür.
A.2 Drehzeiger, Festzeiger und Raumzeiger 188
A.2.3.1 Leistungen in Raumzeigerdarstellung
Bei Raumzeigern wird keine Voraussetzung über ihren zeitlichen Verlauf gemacht. Damit lassen sich nur die Momentanleistungen s(t), p(t) und q(t) direkt angeben. Die Beziehungen gelten in jedem Koordinatensystem, da die Leistungen nicht von der Darsstellung
abhängen! In -Koordinaten resultieren die Gleichungen (A.12).
s t = 3 2 u t i t = p t + jq t = 3 2 u + ju i – ji
p t = 3 2 Re ui = 3 2 u i + u i = 3 2 ui cos ui
(A.12)
q t = 3 2 Im ui = 3 2 u i – u i = – 3 2 ui sin ui
Die Struktur der Gleichungen ist identisch mit derjenigen der Gleichungen für Festzeiger.
Sind Ströme und Spannungen sinusförmig, so lassen sich die Zeigerlängen durch die Effektivwerte der jeweiligen Grössen ausdrücken u = u = 2U eff und i = i = 2I eff .
Damit resultieren die identischen Gleichungen, wie sie für ein symmetrisches Dreiphasensystem mit Festzeigern erhalten werden.
A.2.4 Vergleich Raumzeiger - Festzeiger
Für Raumzeiger gilt:
- Bei Raumzeigern entspricht der räumliche Einfluss der betrachteten Grössen harmonischen Funktionen.
- Der zeitliche Verlauf der Grössen unterliegt keinen Beschränkungen.
- Für die Rücktransformation von zwei auf drei Achsen wird die Eigenschaft benötigt,
dass die Summe aller Grössen Null ist.
Im Unterschied dazu gilt für Festzeiger:
- Bei Festzeigern wird davon ausgegangen, dass die entsprechenden Grössen einen zeitlich harmonischen Verlauf (Sinus/ Cosinus) mit konstanter Kreisfrequenz haben.
- Der Festzeiger stellt den Effektivwert und die Phasenlage der betrachteten Grösse dar
(bezüglich dem mit der gleichen Kreisfrequenz drehenden Koordinatensystem).
Gemeinsam ist bei Fest- und Raumzeigern, dass die angesetzten Verläufe der betrachteten Grössen immer ’gleichfrequente’, harmonische Funktionen sind. Bekanntlich sind
die Überlagerungen harmonischer Funktionen wieder harmonische Funktionen mit der
gleichen Frequenz. Was ändert, sind nur Amplituden und Phasenlagen!
B Literatur
Bücher
[Bro1]
[Büh1]
[Büh2]
[Fis1]
[Hen1]
[Jen1]
[Kir1]
[Kle1]
[Leo1]
[Mil1]
[Mll1]
[Spä1]
Brosch P.F. (1992): Moderne Stromrichterantriebe. Vogel Verlag (Kamprath-Reihe),
Würzburg (2. Auflage)
Bühler H. (1977): Einführung in die Theorie geregelter Drehstromantriebe. Birkhäuser
Verlag, Basel und Stuttgart
Bühler H. (1991): Convertisseurs statiques. Presses polytechniques et universitaires romandes, Lausanne
Fischer R. (1986): Elektrische Maschinen. Carl Hanser Verlag, München Wien (6., völlig
überarbeitete Auflage)
Hendershot J.R., Miller T.J.E (1994):Design of Brushless Permanent Magnet Motors. Oxford University Press, Oxford
Jenni F., Wüest D. (1995): Steuerverfahren für selbstgeführte Stromrichter. VDF-Verlag,
Zürich, B.G. Teubner, Stuttgart
Kirtley J.L., Beaty H.W. (1998): Electric Motor Handbook. McGraw-Hill, New York
Kleinrath H. (1980): Stromrichtergespeiste Drehfeldmaschinen. Springer-Verlag, Wien
Leonhard W. (1974): Regelung in der elektrischen Antriebstechnik. B.G. Teubner, Stuttgart
Milde F. (1990): Dynamisches Verhalten von Drehfeldmaschinen. vde Verlag, Berlin
Miller T.J.E. (1989): Brushless Permanent-Magnet and Reluctance Motor Drives. Oxford
[Schr1]Schröder D. (1995): Elektrische Antriebe 1. Springer-Verlag, Berlin Heidelberg
Späth H. (1983): Steuerverfahren für Drehstrommaschinen. Springer-Verlag, Berlin Heidelberg
Dissertationen
[Eic1]
[Hin1]
Eichenberger P. (1997): Stromzwischenkreis-Umrichter zur Speisung einer Asynchronmaschine mit prädiktiver Regelung der Statorspannung, ETH Zürich.
Hintze D. (1993): Asynchroner Vierquadranten-Drehstromantrieb mit Stromzwischenkreisumrichter und oberschwingungsarmen Maschinengrössen, Universität München.
190
[Jen2]
[Stu1]
Jenni F. (1989): Untersuchung eines netzfreundlichen Asynchronmotor-Antriebes mit
hochfrequent getakteten Stromzwischenkreis-Umrichtern, ETH-Zürich.
Stulz C. (1991): Ein Beitrag zu messtechnischen Bestimmung der charakteristischen
Übertragungsfunktionen von Synchronmaschinen in unterschiedlichen Arbeitspunkten,
ETH Zürich.
Spezielle Fachartikel
[Dep1] Depenbrock M. (1977): Pulsewidth control of a 3-phase inverter with non-sinusoidal
phase voltages. IEEE Industry Applications Society Meeting, Record, S. 399-403
[Dep2] Depenbrock M. (1988): Direct self-control (DSC) of inverter-fed induction machine.
IEEE Transactions on Power Electronics, Vol. 3, Nr. 4, S. 420-429
[Dep3] Depenbrock M. (1985): Direkte Selbstregelung (DSR) für hochdynamische Drehfeldantriebe mit Stromrichterspeisung. ETZ-Archiv, Band 7, Heft 7, S. 211-218
191 C Übungen
C Übungen
C.1 Identifikation von Maschinen
Für die Regelung von Maschinen und Antrieben wird immer ein Modell mit den numerischen Werten der einzelnen Elemente benötigt. Beides wird in den wenigsten Fällen
von den Maschinenherstellern zur Verfügung gestellt. Was (meistens) vorhanden ist, ist
das Typenschild der Maschine, auf dem die wichtigsten Nenndaten angegeben sind. Mit
diesen Daten und zusätzlichen Messungen muss der Anwender die Werte der Ersatzelemente für das gewählte Modell selber bestimmen. Das Vorgehen soll je für eine Gleichstrom-, eine Asynchron- und eine Synchronmaschine vorgestellt und geübt werden. Es
zeigt sich, dass sich ein Teil der Elemente einfach, andere aber nur schwer bestimmen lassen.
Bei der Maschinenidentifikation werden oft Annahmen getroffen, die eine einfache
Bearbeitung der Fragestellung erst möglich machen. Diese Annahmen sind bei ‚normalen‘ Maschinen zulässig. Bei speziellen Bauformen muss sich der Anwender aber bewusst sein, 'was er macht'!
Bedeutung der Typenschilddaten: Einige wichtige Maschinendaten lassen sich nicht
durch einfache Messungen bestimmen. Dies gilt speziell für Grenzwerte:
- Die maximal zulässige Klemmenspannung:
Ist sie für die Maschine nicht genau spezifiziert, so gibt das Typenschild einen Hinweis: Nennspannung plus etwa 20% ist im allgemeinen problemlos.
- Die maximal zulässige Drehzahl. Auf dem Typenschild ist die Nenndrehzahl angegeben. Aus dieser kann die maximal zulässige Drehzahl geschätzt werden. Bei Maschinen bis zu einigen 10kW ist die doppelte Drehzahl von der Festigkeit her meist machbar, die Lager sind aber typischerweise nur für etwa 20% mehr als Nenndrehzahl spezifiziert. Es empfiehlt sich aber immer die Absicherung durch eine Herstellerangabe!
- Der stationär zulässige Strom: Dieser ist durch den Wärmeabfluss aus den Wicklungen
bestimmt. Stationär ist kaum mehr als der Nennstrom zulässig! Einzelne Maschinen
sind dynamisch für grössere Ströme während einer begrenzter Zeit spezifiziert - anschliessend muss aber Zeit zum Abkühlen eingeräumt werden.
C.1 Identifikation von Maschinen 192
C.1.1 Gleichstrommaschine: Identifikation und Regelung
Diskutiert wird eine fremderregte Gleichstrommaschine. Bestimmt werden sollen die
Elemente der Ersatzschaltung in Bild C.1.
iA
RA
LA
uA
e
Mel
me
LE
RE
iE
uE
Bild C.1. Ersatzschaltung der fremderregten Gleichstrommaschine
Vom Typenschild der Maschine wurden die Nenndaten abgelesen. Rotorkreis:
-
Spannung:
Strom:
Leistung:
Drehzahl:
UA
IA
P
n
= 300V
= 20.7A
= 5.8kW (abgegebene Leistung an der Welle)
= 2000U/min.
Erregerkreis:
- Spannung:
- Strom:
UE = 220V
IE = 1A
Durch vier Messungen bei Nenntemperatur werden weitere Informationen gewonnen:
Rotorwiderstand: Ohne Erregung und bei blockierter Welle wird die Klemmenspannung
bei Nennstrom und verschiedenen Rotorpositionen gemessen. (Der nichtlineare BürstenSpannungsabfall wird nicht speziell berücksichtigt.) Es resultieren 10.4V bei 20.7A.
Rotorzeitkonstante: Bei blockierter, nicht erregter Maschine wurde die Schrittantwort
des Rotorkreises gemessen: nach dem Anlegen einer Gleichspannung uA stieg der Strom
iA in 15ms auf 63.2% des Endwertes an, d.h. die Zeitkonstante beträgt 15ms. Die gleiche
Zeit resultierte als Abklingzeitkonstante, als die Spannung auf Null geschaltet wurde.
Erregerzeitkonstante: In der gleichen Art wurde die Schrittantwort des Erregerkreises
gemessen: nach dem Anlegen der Gleichspannung uE stieg der Strom iE in 4.55ms auf
63.2% des stationären Endwertes an, d.h. die Zeitkonstante beträgt 4.55ms.
(Die beiden Zeitkonstanten können auch durch Messungen der Frequenzgänge ermittelt
werden. Diese etwas aufwendigere Methode liefert eher die genaueren Resultate.)
Massenträgheitsmoment J: Bei Nennfluss und ohne Lastmoment wurde die Maschine
aus einem stromgeregelten Stromrichter mit konstantem halben Nennstrom gespeist. Die
2
Drehzahländerung betrug dabei im tiefen Drehzahlbereich t = 50rad s . Bei
grösseren Drehzahlen nahm der Wert leicht ab. (Weitere Methode: Auslaufmesssung.)
193 C Übungen
C.1.1.1 Bestimmen der Elemente der GM-Ersatzschaltung
Bestimmen Sie mit Hilfe der vorgestellten Daten die Maschinenparameter der GM.
a) Den Rotorwiderstand RA und damit anschliessend die Rotorinduktivität LA.
b) Den Erregerwiderstand RE und damit anschliessend die Erregerinduktivität LE.
c) Die Flussverkettung bei Nennerregung und Nennlast.
d) Das mechanische Drehmoment Mme an der Welle (aus den Nenndaten).
e) Die Reibungs- und Lüfterverluste PV,me.
f) Den Wirkungsgrad der Maschine im Nennpunkt (Erregung nicht vergessen!).
g) Das Massenträgheitsmoment J unter Vernachlässigung der mechanischen Verluste.
h) Die Drehzahl (in rad/s und U/min) bei Nennspannung im Leerlauf, bei halbem NennErregerstrom (vernachlässigen von Lüfter- und Reibverlusten, d.h. e = u A ).
i) Das maximale elektrische Drehmoment bei Nennstrom und halbem Erregerstrom.
C.1.1.2 Übertragungsfunktionen der GM
Die Auslegung von Strom- und Drehzahlregler für die GM lässt sich mit Hilfe des Bodediagramms vornehmen. Es werden verschiedene Übertragungsfunktionen (ÜF) der benötigt. Diese sollen für Nenn-Erregung und damit Nennfluss bestimmt werden:
a)Bestimmen Sie für den Erregerkreis die ÜF: G E s = I E s U E s .
Damit lässt sich der Regler für den Erregerstrom IE auslegen.
b)Bestimmen Sie für eine blockierte Maschine die ÜF: G A s = I A s U A s .
Mit dieser ÜF kann der Stromregler für IA ausgelegt werden. Da IA proportional zu
Drehmoment ist, entspricht der Regler (bei konstanter Erregung) auch direkt dem Moment-Regler.
c) Bestimmen Sie die ÜF Drehzahl zu Rotorstrom: G s = me s I A s .
Diese ÜF wird für die Auslegung der Drehzahlregelung benötigt.
C.1.1.3 Ankerstrom und Drehzahlregler für eine GM
Mit den vorgehend bestimmten Übertragungsfunktionen können die verschiedenen Regler für die Gleichstrommaschine ausgelegt werden. Die Drehzahlregelung soll dabei als
Kaskadenregelung mit unterlagerter Ankerstromregelung ausgeführt werden.
a) Dimensionieren Sie einen PI-Regler für den Erregerstrom
(Vorschlag: kp maximal 10 wählen wegen Rauschen im System).
b) Legen Sie für Nennfluss den Ankerstrom-Regler für die blockierte Maschine aus
(wieder kp maximal 10 wählen wegen Rauschen im System), und bestimmen Sie die
ÜF des geschlossenen Strom-Regelkreis: G i A = I A ist s I A Soll s
Überprüfen Sie schliesslich das Regelverhalten der Ankerstromregelung.
c)Legen Sie den äusseren Regelkreis für die Drehzahlregelung der GM aus. Überprüfen
sie abschliessend das Regelverhalten der ganzen Kaskaden-Regelung mittels einer Simulation.
C.1 Identifikation von Maschinen 194
C.1.2 Käfigläufer - Asynchronmaschine
Die Elemente der Käfigläufer ASM mit der Transformator-Ersatzschaltung in Bild C.2
sollen identifiziert werden.
Luftspalt
Statorseite
IS
RS
I0
LS
US 3
Lh
Im
RFe
Rotorseite
LR
RR
IR
Uq
Rme =
RR(1-s)/s
IFe
Bild C.2. Transformator-Ersatzschaltung der Asynchronmaschine
Vom Typenschild der Maschine wurden die folgenden Nenndaten abgelesen:
-
Spannung: 400V / 50Hz
Strom:
15A
cos:
0.741
Leistung: 7kW
Drehzahl: 1450 U/min.
(verkettete Spannung!)
(abgegebene Leistung an der Welle)
Die Maschine ist in Stern geschaltet.
Durch drei Messungen werden weitere Informationen über die Maschine gewonnen:
Ohmscher Widerstand der Statorwicklungen: Bei stillstehender Maschine wurde mit
Gleichstrom in den drei Phasen je eine Strom-Spannungsmessung durchgeführt. Für den
Widerstand resultiert als Mittelwert der drei Messungen pro Strang: RS = 0.7
‚Leerlauf‘-messung: Bei dieser Messung soll der Schlupf s = 0 und damit R me =
werden, d.h. der Rotorkreis ist unterbrochen. Dazu muss der Rotor wegen der Reibungsverluste mit einer zweiten Maschine auf die synchrone Drehzahl angetrieben werden.
Gemessen wird dreiphasig bei der Messfrequenz 50Hz, der Drehzahl n = 1500U/min und
der Spannung US = 400V: Es resultieren P0 = 300W; S0 = 6kVA.
‚Stillstands‘-messung: In diesem Betriebsfall wird der Schlupf s= 1 und damit Rme=0.
Der Rotor muss für die Messung wegen des auftretenden Drehmomentes blockiert werden! Gemessen wurde wiederum dreiphasig, bei der Messfrequenz 5Hz und dem Nennstrom IS =15A. Es resultierten die Leistungen: P = 880W; S = 903VA.
Massenträgheitsmoment: Aus den mechanischen Abmessungen wurde das Massenträgheitsmoment der Maschine alleine berechnet: J= 0.05kgm2.
195 C Übungen
Zur Beachtung:
1. Für die Bestimmung der Elemente sollten alle Messungen bei Betriebstemperatur der
Maschine ausgeführt werden. Bei Nennbetrieb liegen die Stator-Wicklungstemperatur
im Bereich von etwa 75°C und die der Rotorwicklung bei etwa 150°C. Dies ergibt signifikant grössere Widerstandswerte als bei Raumtemperatur.
Die Typenschilddaten gelten bei Betriebstemperatur!
2. Die Elemente der Ersatzschaltung können für eine Maschine in Dreieck- oder eine Maschine in Sternschaltung bestimmt werden. Der Verwendung der richtigen Stranggrössen muss also Beachtung geschenkt werden.
3. Bei der Stillstandsmessung von Maschinen mit ausgeprägter Stromverdrängung wird
der Rotorwiderstand zu gross, wenn mit 50Hz gemessen wird. In diesem Fall muss entweder mit einer tieferen Frequenz gemessen werden, oder der Rotorwiderstand muss
auf andere Art bestimmt werden. Eine Schätzmethode ist bei [Kar1] vorgestellt.
4. Die Identifikation der Maschine bei Nenndaten ergibt die ‚Nenn‘-Werte der Ersatzelemente. Dabei ist das Eisen schon im Bereich der Sättigung. Bei verändertem Fluss ändern die Werte. Das gilt auch für das Kleinsignalverhalten um einen Arbeitspunkt.
C.1.2.1 Bestimmen der Elemente der ASM-Ersatzschaltung
Bestimmen Sie mit Hilfe der vorgestellten Daten die Maschinenparameter für eine Sternschaltung der Maschine. (Welche Spannungen und Ströme müssen eingesetzt werden?)
a) Die Polpaarzahl der Maschine, die Winkelgeschwindigkeit me in rad/s im Nennarbeitspunkt und den Schlupf s bei Nennleistung.
b) Aus der Stillstandsmessung den auf die Statorseite transformierten Rotorwiderstand
RR und die Streuinduktivitäten LS und LR. Die beiden Streuinduktivitäten werden als
gleich gross angenommen. (Vereinfachung: RFe und Lh vernachlässigen.)
c) Aus der Leerlaufmessung die Hauptinduktivität Lh und den Verlustwiderstand RFe
(Vorgehen: Zuerst von der gesamten Wirk- und Blindleistung diejenigen in RS und LS
subtrahieren und daraus dann Lh und RFe bestimmen.)
d) Die effektiv abgegebene Leistung Pmeund den Wirkungsgrad der Maschine bei
Nennbetrieb. (Hinweis: zuerst die Spannung über der Hauptinduktivität berechnen.)
C.1.2.2 Simulation von Drehmoment und Strom der ASM
Mit den identifizierten Maschinendaten können nun verschiedene Kennlinien berechnet
werden. Bestimmen Sie für US = 400V/50Hz = konstant mit Hilfe von Matlab:
a) Den Verlauf des Drehmomentes M in Funktion der mechanischen Drehzahl für
fme = -fS bis 2fS und das auftretende Maximum, das Kippmoment MK.
c) Den Betrag des Eingangsstromes IS in Funktion von fme.
C.1 Identifikation von Maschinen 196
C.1.3 Synchronmaschinen
Bemerkungen zur Identifikation von Maschinenparametern:
Dämpferwicklung: Die vollständige Identifikation einer Vollpol-SM mit Dämpferwicklung ist nicht einfach. Auf die Dämpferwicklungen hat der Anwender von aussen
keinen Zugriff und ihre Daten müssen deshalb auf indirekte Weise ermittelt werden. Bekannt ist der ‚Kurzschluss-Versuch‘ bei dem nicht die Werte der Elemente selbst, sondern
die Zeitkonstanten der Dämpferwicklung, d.h. das Verhältnis L/R bestimmt wird. Infolge
der magnetischen Sättigung ist die Zeitkonstante abhängig vom Magnetisierungsgrad,
d.h. es resultieren unterschiedliche Werte bei Nennbetrieb und bei Feldschwächung.
Auch für das Klein- und das Grosssignalverhalten erhält man unterschiedliche Werte.
Beim Einsatz von SM mit Stromrichter-Speisung ist vor allem das Kleinsignalverhalten
der Dämpferwicklung von Interesse. Dieses kann ermittelt werden, indem im interessierenden Arbeitspunkt den stationären Grössen zusätzlich Messignale überlagert werden
und deren Einfluss ausgewertet wird. Dies kann im Zeit- oder im Frequenzbereich gemacht werden. Ein mögliches Verfahren und weitere Verweise sind z.B. in [Stu1] beschrieben.
Muss statt einer Vollpol- eine Schenkelpolmaschine identifiziert werden, so werden die
Schwierigkeiten durch die unterschiedliche Ausprägung in d- und q-Richtung noch grösser, es müssen die Zeitkonstanten für beide Achsen bestimmt werden.
Die Dämpferwicklung tritt nur bei dynamischen Vorgängen und für Verzerrungen in
den Speiseströmen in Erscheinung. Bei stationärer, symmetrischer sinusförmiger Speisung hat sie keinen Einfluss.
Auf die Identifikation der Dämpferwicklung wird nicht weiter eingegangen, es muss
auf die spezielle weiterführende Literatur verwiesen werden.
Schlupfversuch: Bei einer fremderregten SM lassen sich die Reaktanzen Xd=SLd und
Xq=SLq mit der folgenden Messung bestimmen:
Die Statorwicklung der SM wird mit Nennspannung gespeist. Die Erregerwicklung ist
offen. Mittels einer Hilfsmaschine wird die Drehzahl der SM so eingestellt, dass eine
kleine Differenz entsteht und Statorfeld und Rotor langsam gegeneinander drehen: So
liegt das Feld einmal parallel zur d- und einmal parallel zur q-Achse. Aus den Strom- und
Spannungsmessungen kann die jeweilige Reaktanz bestimmt werden. Der Maximalwert
entspricht Xd, der Minimalwert Xq. Wichtig ist, dass die Drehzahldifferenz klein (< 1%
n) gewählt wird, damit der Einfluss der Dämpferwicklungen vernachlässigt werden
kann. Als Folge des Reluktanzmomentes variiert das Drehmoment bei der Messung, was
die Messung verkompliziert.
Der Schlupfversuch ist auch für eine mit Permanentmagneten erregte Maschine möglich. Dabei muss aber von der treibenden Spannung in der q-Achse noch die vom Polrad
induzierte Spannung abgezogen werden um die Spannung über der Impedanz zu erhal-
197 C Übungen
ten. Die Drehmomentpulsationen pendeln zwischen Null und dem Kippmoment. Es müssen für die Messung also grosse Drehmomente aufgebracht werden.
C.1.3.1 Schenkelpol-SM als Mustermaschine
Betrachtet wird eine fremderregte SM mit ausgeprägten Polen im stationären Betrieb.
Die Ersatzschaltung eines Stator-Stranges für stationären Betrieb zeigt Bild C.3.
RE
IS
US
RS
U S‘
Uq,X =
SLdIS,d
Ud,X =
U
-SLqIS,q P
IE
LE
UE
Bild C.3. Links: Strang-Ersatzschaltung der Schenkelpol-Synchronmaschine,
rechts: Erregerkreis
Vom Typenschild wurden die folgenden Nenndaten für Motorbetrieb bei Sternschaltung
abgelesen:
-
Spannung:
Strom:
Leistung:
Drehzahl:
400V / 50Hz (verkettete Spannung!)
80A
50kW
(Motorbetrieb, abgegebene Leistung an der Welle)
3000 U/min.
Mittels ‚quasi stationären‘ Messungen werden weitere Informationen gewonnen:
Statorkreis: Die Erregung wurde ohne Last so eingestellt, dass der Statorstrom null wurde. Bei gleichbleibender Erregung wurde die Maschine anschliessend so belastet, dass sie
aus dem Netz etwa 50kW bezog. Dabei ergab eine Messung mit dem Stroboskop den Polradwinkel =30° und den Strom 79A, nacheilend. Weiter ergab eine Gleichstrom/ -spannungsmessung einen Strangwiderstand von RS= 75m.
Schlupfversuch: Aus einem Schlupfversuch an der betrachteten Maschine resultierte
das Verhältnis Xq/Xd = 0.4.
Dämpferwicklungen: Da die Messungen im (fast) stationären Betrieb durchgeführt
wurden, ist der Einfluss von eventuellen Dämpferwicklungen vernachlässigbar.
C.1 Identifikation von Maschinen 198
C.1.3.2 Bestimmen der Elemente der SM-Ersatzschaltung
Der Übung seien die Grundgleichung und drei Bemerkungen vorangestellt:
U S = I S R S + U X d + jU X q + U P
(C.1)
- UP eilt im stationären Betrieb der Polradachse d um 90° vor, liegt also auf der q-Achse.
- Beim Spannungsabfall über den Reaktanzen darf die 90° Drehung durch den Faktor j
nicht vergessen werde.
- Bei der Durchführung der Messungen im Nennpunkt kann der Statorwiderstand für die
Bestimmung der Reaktanzen mit guter Genauigkeit vernachlässigt werden.
Bestimmen Sie mit Hilfe der gegebenen Daten die folgenden Parameter der Maschine:
a) Die Strangspannung US bei einer Stern-Ersatzschaltung.
b) Den cos und den Winkel der Klemmengrössen im gemessenen Arbeitspunkt.
c) Das Nennmoment Mn bei den Nenndaten.
d) Die Impedanzen Xd und Xq aus Strom und Spannung.
Grafisches Vorgehen (Vorschlag: 20V; 20A = 1cm):
- Zerlegen Sie die Gleichung (C.1) in Real- und Imaginärteil,
- zeichnen Sie im dq-Koordinatensystem die Komponenten Ud, Uq und Ud,X, Uq,X ein,
- zeichnen Sie Id und Iq ein,
- bestimmen Sie damit die Impedanzen.
e) Vergleichen Sie die berechneten Xd und Xq mit der Schlupfmessung
f) Wie gross wird IS (bei Nenn- Statorspannung und -leistung und Vernachlässigung des
Statorwiderstandes RS) wenn der cosan den Klemmen 1 ist?
Wie beeinflussen Sie den cos
C.1.3.3 Erregerkreis
Für den Erregerkreis liest man vom Typenschild: UE,n= 60V; IE,n= 20A. Das Kurzschliessen der bestromten Erregerwicklung ergab eine Abkling-Zeitkonstante von 0.8s.
Bestimmen Sie für den Erregerkreis:
a) die Erregerleistung im Nennpunkt PE,n
b) den Erregerwiderstand RE
c) die Erregerinduktivität LE
und schliesslich für die ganze Maschine (Stator- und Erregerkreis:
d) den Wirkungsgrad bei Nenndaten.
199 C Übungen
C.2 Drehfeld und Raumzeiger
C.2.1 Erzeugung eines Drehfeldes
Gegeben ist der vereinfachte Stator einer Drehfeldmaschine mit drei räumlich um 120
Grad versetzten Nutenpaaren, d.h. eines pro Strang. Der Rotor besteht aus Eisen ohne
Wicklungen. Die Permeabilität des Eisens im Stator und im Rotor sei sehr gross. Die
Nutenabmessungen sind vernachlässigbar klein und die Windungszahl pro Strang ist 20.
Der Luftspalt beträgt 2mm.
S
iS,W
H
iS,V
Stator
Rotor
iS,U
Bild C.4.
Modell einer Drehfeldmaschine für die Analyse des Luftspaltfeldes
Die Stator-Ströme in den drei Wicklungen bilden ein symmetrisches Dreiphasensystem:
i U = î cos t ;
i V = î cos t – 2 3 ;
i W = î cos t – 4 3
Für die Werte = 1 s ; t= 3 s; î = 1 A soll über den Umfang des Luftspaltes der
Verlauf der magnetischen Feldstärke H und der magnetischen Flussdichte B bestimmt
werden.
Man beachte dabei: Die Leiter in beiden Nuten eines Stranges tragen zum Feld bei.
a) Berechnen Sie die einzelnen Beiträge der drei Phasen zur Feldstärke H. im gegebenen
Arbeitspunkt.
b) Zeichnen Sie im Lösungsblatt in der ersten Abwicklung des Luftspaltes die Teil-Feldstärken HU,V,W() der drei Phasen und in der Zweiten das Summenfeld H() für den
vorgegebenen Zeitpunkt = 1 s ; t= 3 s; î = 1 A .
c) Berechnen Sie den Scheitelwert der magnetischen Flussdichte B̂ im Luftspalt.
d) Skizzieren Sie die Grundschwingung der magnetischen Flussdichte B1() des Summenfeldes in der dritten Abwicklung (drittes Bild).
C.2 Drehfeld und Raumzeiger 200
H
10kA/m
iV
iU
iW
iV
iU
iW
iV
iV
iU
iW
iV
iU
iW
iV
iV
iU
iW
iV
iU
iW
-10kA/m
H
20kA/m
-20kA/m
B
Bild C.5. Lösungsblatt für die Feldverläufe
iV
201 C Übungen
C.2.2 Zeigerdarstellung eines Drehfeldes
Die magnetische Flussdichte B einer Maschine mit sinusförmigem Feldverlauf soll als
Raumzeiger für die Zeitpunkte t= 0s, /4s, /2s, s und 3/2s dargestellt werden.
Zur Erinnerung: Die Zeiger werden so gelegt, dass sie in Richtung des Scheitelwertes der
harmonischen Funktion zeigen. Die Richtung der einzelnen Phasen ist damit durch die
Wicklungsanordnung und die Polarität des Stromes bestimmt. Die resultierende
Flussdichte ist anschliessend das Resultat der Einzelflüsse.
–1
2
Zahlenwerte: = 1s ; k m = 1Vs m A ; î = 1 A
und für die Ströme gilt:
i U = î cos t ;
i V = î cos t – 2 3 ;
i W = î cos t – 4 3
a) Bestimmen Sie mit (4.42) bis (4.44) die Beiträge der drei Phasen zur Flussdichte in
uvw- und anschliessend in -Darstellung und vervollständigen Sie die Tabelle.
(Normierungsfaktor für die Zeigerlänge in - Darstellung nicht vergessen!)
b) Zeichnen Sie in der -Ebene die entsprechenden Raumzeiger von B ein.
(Wie verhält sich die Amplitude von B in den verschiedenen Zeitpunkten?)
BU
t
BV
BW
B
B
B
0
V
1
1
-1
W
U
1
-1
-1
Bild C.6. Raumzeiger der magnetischen Flussdichte
1
-1
C.2 Drehfeld und Raumzeiger 202
C.2.3 Koordinatentransformationen
C.2.3.1 uvw->-Koordinatentransformation
Für die Arbeit mit Raumzeigern ist es oft praktisch, aus den (messbaren) dreiphasigen
Grössen die -Komponenten nachzubilden. Dazu soll eine einfache ‚Transformationsschaltung‘ gebaut werden.
a) Realisieren Sie mit Hilfe der gegebenen Funktionsblöcke eine Schaltung, mit der aus
drei Zeitgrössen xU, xV und xW die zugehörigen -Komponenten x und x gebildet
werden können. Beschriften Sie die Ein- und Ausgänge und geben Sie, wo notwendig,
die Konstanten der Blöcke an.
(Die Blöcke können selbstverständlich den Anforderungen angepasst werden).
+
+
-
*
*
/
jp
Multiplizierer/ MultiplikationsAddierer/
Subtrahierer
Dividierer
konstante
jp
Konstante
1/s
Integrator
d/dt
Differenzierer
S*
Allgemeiner
Funktionsblock
Bild C.7. Funktionsblöcke für die Modellierung von Funktionen und Maschinen
b)In den meisten Anwendungen können Spannungen nur verkettete gemessen werden,
d.h. uUV, uVW, und uWU. Leiten Sie die -Komponenten aus den verketteten Spannungen her. Beschreiben Sie dazu als erstes die verketteten Spannungen aus den Phasenspannungen und verwenden Sie dann das Wissen, dass die Summe aller drei verketten
Spannungen und auch aller drei Phasenspannungen Null ist (keine Gleichtaktkomponenten).
c)Berechnen Sie aus den -Komponenten die verkettenten Spannungen uUV, uVW, und
uWU.
C.2.3.2 Umrechnungen zwischen zwei Koordinatensystemen
Ein Zeiger soll in drei verschiedenen Koordinatensystemen beschrieben werden:
- im stillstehenden -System
- im gegenüber dem -System mit = 3 + t drehend xy-System
- im gegenüber dem -System mit = 2 + 2t drehend dq-System
Der stehende Zeiger hat eine Länge von 5V und liegt im -System auf der reellen Achse.
a) Geben Sie die Zeigerkomponenten in allen drei Systemen zur Zeit t=0 an.
b) Entsprechend zu a) für den Zeitpunkt t=1s.
c) Geben Sie die direkte Transformation zwischen dem xy- und dem dq-System an.
203 C Übungen
C.3 Maschinendarstellung mit Raumzeigern
C.3.1 Asynchronmaschinen
Für die Regelung werden ASM normalerweise im statorfesten - oder im flussorientierten xy-Koordinatensystem beschrieben.
C.3.1.1 Strom, Fluss, Drehmoment im - Koordinatensystem
Von einer Käfigläufer-ASM mit einem Polpaar sind in einem bestimmten Zeitpunkt der
Statorfluss S=j2 als Raumzeiger und die drei Statorströme iU, iV und iW gegeben:
i U = 2 A cos ; i V = 2 A cos – 2 3 ; i W = 2 A cos + 2 3 ; = 3
a) Bestimmen Sie den Raumzeiger IS,
b) Zeichnen Sie Strom und Flusszeiger in der -Ebene auf
c) Bestimmen Sie das resultierende mechanische Drehmoment
C.3.1.2 Spannungsgespeiste ASM in verschiedenen Koordinatensystemen
Betrachtet wird eine Käfigläufer-ASM u R = 0 in einmal in einem stillstehenden und einmal in einem beliebigen, drehenden xy-Koordinatensystem. Die Maschine wird
aus einer Spannungsquelle gespeist. Eingangsgrössen sind im ersten Teil die Statorspannung uS und das Lastmoment MLast. Die Ausgangsgrössen sind entsprechend Mme, me
und der Statorstrom iS.
Im zweiten Teil ist die Winkelgeschwindigkeit K des Koordinatensystems eine weitere
Eingangsgrösse. Das Modell mit dieser Beschreibung kann beispielsweise für die Simulation von flussorientierten Maschinendarstellungen verwendet werden.
a)Modellieren Sie die Maschine in Simulink mit den Daten aus der Maschinenidentifikation in Kapitel C.1.2. Beachten Sie dabei, dass die Maschine für Sternschaltung am
400 V Netz mit einer Strangspannung von 230 V ausgelegt ist.
b)Schalten Sie die Maschine hart an ein 400 V Netz (230 V pro Strang) und verifizieren
Sie damit den im Stoff vorgestellten Direktanlauf.
c)Simulieren Sie den im Stoff vorgestellten Stern-Dreieckanlauf. Erzeugen Sie die Eingangsspannungen für das Model dazu mit drei in Stern geschalteten 230V 3 Quellen,
die sie im Sternanlauf direkt abgreifen.
d)Schalten Sie von der im stationären Betrieb laufenden Maschine die drei Statorspannungen auf Null (Klemmenkurzschluss).
e)Erstellen Sie ein Modell der ASM in einem mit K drehenden Koordinatensystem.
Speisen Sie die Maschine mit einer symmetrischen 400 V / 50 Hz Spannung. Transformieren Sie die Ströme wieder in das uvw-System und vergleichen Sie das Resultat mit
Aufgabe b).
C.3 Maschinendarstellung mit Raumzeigern 204
C.3.2 Synchronmaschinen
Für Synchronmaschinen soll die Umrechnung zwischen statorfesten - und rotorfesten
dq-Grössen, sowie das Erstellen von Blockdiagrammen geübt werden.
C.3.2.1 Klemmenspannung der Synchronmaschine
Eine SM rotiert mit der Drehzahl 2000 U/min so, dass das dq-Koordinatensystem im Gegenuhrzeigersinn dreht. Die Polpaarzahl ist p=1
q
US
d
(t)
Bild C.8.
Zeigertransformation -dq-System
Zur Zeit t=0 beträgt der Spannungszeiger im dq-System uS=(100+j200)V und das dq-System ist bezüglich dem stillstehenden -System um den Winkel =/2 verdreht.
Übungen: Bestimmen Sie im Zeitpunkt t=12ms:
a) die Drehzahl des dq-Koordinatensystems
b) den Winkel (t) des dq-Koordinatensystems
c) die Spannungen uS und uS
d) die Spannungen uU, uV und uW
C.3.2.2 Blockschaltung des Erregerkreises der SM
Betrachtet wird der Erregerkreis einer SM ohne Dämpferwicklung. Der Stator wird mit
Stromquellen gespeist, der Erregerkreis aus einer Spannungsquelle.
a) Zeichnen Sie das Blockschaltbild des vorliegenden Erregerkreises.
b) Was geschieht mit dem Erregerstrom, wenn der Statorstrom ändert.
C.3.2.3 SM -Blockschaltung bei Ld=Lq
Betrachtet wird eine SM ohne Dämpfer mit Stromspeisung, bei der die Längsinduktivität
gleich der Querinduktivität ist, d.h. Ld=Lq. Der Erregerfluss sei konstant = 0.
a) Formulieren Sie die Drehmomentgleichung für Ld=Lq. (Was wird einfacher?)
b) Zeichen Sie das Blockdiagramm für Drehmoment und Drehzahl bei Stromspeisung.
205 C Übungen
C.4 Gleichrichter
Gegeben ist eine ungesteuerte Gleichrichterbrücke am dreiphasigen Netz. Die Schaltung
in Bild C.9. wird mit und ohne Glättungsdrossel Ld im Zwischenkreis analysiert.
U
uWU V
W
Ld
iN
uUV
uVW
iD
ud
iGR
iC
Cd=1mF
RL=40
iL
rd=20m
UF0=0.7V
rESR=15m
C
Ersatzschaltung Ersatzschaltung
Diode
Kondensator
Bild C.9. Links: Diodengleichrichter mit kapazitiver Glättung,
rechts: Ersatzschaltung von Diode und Kondensator für die Verlustberechnung
Die gemessene Zwischenkreisspannung sei Ud=550V, die Netzimpedanz ist klein. Für
die Verlustberechnung werden für die Dioden und den Kondensator die Modelle im Bild
rechts verwendet.
Erster Teil: Die Zwischenkreisdrossel Ld ist sehr klein und kann vernachlässigt werden.
Bestimmen Sie:
a) Die Nenn-Netzspannung mit der die Brücke gespeist wird,
b) den Strommittelwert in der Last IL,d,
c) den Strommittelwert ID,d durch die Diode,
d) die Stromeffektivwerte im Netz IN, in der Diode ID und im Kondensator IC,
e) die Leitverluste in der Diode PD,V,
f) die Verluste im Kondensator PC,V,
g) die Scheinleistung im Netz SN,
h) die Wirkleistung im Netz PN (bei verlustlosen Elementen),
i) die Blindleistung im Netz QN,
k) den Leistungsfaktor N im Netz.
Zweiter Teil: Die Zwischenkreisdrossel Ld sei sehr gross.
Beachte: Bei den auftretenden blockförmigen Strömen ist im 3-phasigen Fall t'E=1/6 , da
t'E die Dauer der zwei ‚Einzelpulse‘ beschreibt. Zusammen ergeben sie dann die sichtbare Leitdauer von 1/3.
- Skizzieren Sie die Stromverläufe in einer Diode und in einer Netzzuleitung.
- Bestimmen Sie anschliessend die gleichen Grössen wie im ersten Teil, aber diesmal
ausgehend von einer Netzspannung von 400V.
- Wie charakterisieren Sie die Unterschiede zwischen den beiden Bauformen?
C.5 Auslegung eines Stromrichters 206
C.5 Auslegung eines Stromrichters
C.5.1 Ansteuerung / Kühlung
Für einen Antrieb ab dem 400V-Netz soll ein dreiphasiger IGBT-Stromrichter ausgelegt
werden. Die Auslege-Scheinleistung beträgt 20kVA.
Als Halbleiter werden drei IGBT-Module (je zwei IGBT mit antiparaller Diode) und einer Schaltfrequenz von 8kHz eingesetzt. Weiter wird mit forcierter Luftkühlung gearbeitet.
Daten:
Die Datenblatt-Angaben der Module sind 1200V und 75A (SKM 75GB123D von Semikron). Die Gateansteuerung benötigt 0V und 15V; die Gateladung beträgt dabei 400nC.
Für die Verlustberechnung von IGBT und Dioden gilt:
IGBT: UF0 = 1.8V; rF = 38 m
Eon+Eoff bei 40A = (6+4)mWs;
Eon+Eoff bei 20A = (4+2)mWs
Diode: UF0 = 1.2V; rF = 26 m
Kühlung:
Der gewählte Kühlkörper hat eine thermischen Widerstand von
der Wärmewiderstand vom Modul auf den Kühlkörper beträgt
der Übergang vom IGBT auf das Modul
und von der Diode zum Modul
Die maximale Sperrschichttemperatur beträgt
und die Umgebungstemperatur der Luft ist maximal
RthKU= 0.12K/W,
RthGK= 0.05K/W,
RthJM= 0.27K/W
RthJM= 0.6K/W.
J = 150C
40 Grad Celsius.
207 C Übungen
Eckdaten, Ansteuerung:
a) Bestimmen Sie die Eckdaten für die IGBT (û, î im Betrieb) und überprüfen Sie die gegebenen IGBT-Module auf ihre Eignung (Begründung?).
b) Bestimmen Sie die Ansteuerleistung pro IGBT bei der Schaltfrequenz 8 kHz.
Verluste, Kühlung:
c) Bestimmen Sie die Verluste, für den folgenden Extremfall:
Der Scheitelwert des Stromes (40A) fliesst stationär durch einen einzigen IGBT in die
Last hinein. Der Rückfluss geht durch zwei weitere IGBT in zwei anderen Modulen zu
gleichen Teilen zurück.
Zusätzlich wird noch geschaltet, in den Dioden treten aber aufgrund der kurzen Leitdauer keine Verluste auf.
d)Bestimmen Sie die Verluste, für den Fall, dass die Ausgangsspannung des Stromrichters Null beträgt und voller Strom fliesst. Dies entspricht näherungsweise einer stillstehenden Maschine bei vollem Moment. Alle IGBT werden dabei mit 50% Einschaltdauer betrieben: Die Ausgangsfrequenz des Stromrichters betrage wieder Null, d.h. der
Scheitelwert des Stromes (40A) fliesst durch einen einzigen IGBT und seine Freilaufdiode in die Last hinein und durch zwei andere Brückenzweige wieder zurück.
e)In einem Hybridfahrzeug sollen die Leistungshalbleiter wassergekühlt werden. Der
Wärmeübergangswiderstand vom Kühlkörper auf das Wasser beträgt Rth= 0.05K/W.
Die Eintrittstemperatur des Wassers beträgt 80 Grad Celsius - die Austrittstemperatur
85 Grad (Mittelwert 82.5 Grad). Der (mittlere) Wärmewiderstand pro Halbleiter
(IGBT mit Paralleldiode) betrage RthJM= 0.4K/W und der vom Modul RthMK= 0.05K/
W. K
- Welche gesamte Verlustleistung kann abgeführt werden, wenn die maximale Kristalltemperatur 130 Grad C betragen darf?
- Wieviele Liter Wasser pro Minute werden benötigt, um 200W abzuführen?
(Spezifische Wärmekapazität von Wasser 4.18kJ/kg)
Weiterführende Aufgabe ohne Musterlösung:
f) Alle drei Phasen werden symmetrisch sinusförmig moduliert. Bestimmen Sie die Verluste und die Temperaturen von IGBT und Dioden in Funktion des Modulationsgrades,
und des cosunter der Annahme, dass die Frequenz so hoch ist, dass die Temperaturpulsation ausgemittelt wird.
Der Stromscheitelwert sei 40A und als Mittelwert kann mit den Schaltverlusten von
20A (Eon+Eoff bei 20A = (4+2) mWs= 6mWs) gerechnet werden.
Dieser Aufgabenteil kann analytisch oder mit dem ‚Thermal Modelling‘ von PLECS
gelöst werden.
C.5 Auslegung eines Stromrichters 208
C.5.2 RC-Entlastung (Snubber)
Für die Auslegung der RC-Glieder zur Entlastung der IGBT wird eine Zwischenkreisspannung von 600V und ein zulässiges Überschwingen der Spannung an den IGBT von
150V bei 40A angesetzt. Über dem ohmschen Widerstand des Snubbers sollen maximal
100V abfallen.
Die gesamte Serieinduktivität der Zwischenkreiskondensatoren beträgt 30nH; die Induktivität zwischen den Kollektor- und den Emitteranschlüssen der IGBT 30nH und für den
Aufbau werden 50 nH geschätzt.
a) Bestimmen Sie die für die Auslegung noch zu berücksichtigende Induktivität LA.
b) Bestimmen Sie den Widerstand RS
c) Bestimmen Sie den ‚Snubber‘- Kondensator CS so, dass der resultierende Wellenwiderstand ZW dem Widerstand RS entspricht.
d)Berechnen Sie die auftretenden Verluste pro RC-Glied
e) Simulieren Sie einen Brückenzweig mit Zwischenkreis und den angenommenen Induktivitäten.
Hinweis:
Wählen Sie dazu die Modulinduktivitäten Null, da deren Energie im Modul selber in
Wärme umgesetzt wird.
In den Induktivitäten und Kapazitäten müssen die entsprechenden Anfangsbedingungen für die Ströme und Spannungen gesetzt werden.
209 C Übungen
C.6 Stromrichter mit Grundfrequenzsteuerung
Am idealen dreiphasigen Stromrichter gemäss Bild C.10 sollen die Funktion des zeitdiskreten SR und die verschiedenen auftretenden Signale genau betrachtet werden.
- Am SR ist eine symmetrische Last angeschlossen,
- die drei symmetrischen Schaltfunktionen des SR beschreiben eine Grundfrequenzsteuerung,
- sU ist ein symmetrisches Rechtecksignal mit der steigenden Schaltflanke bei t = 0,
- für die drei idealen symmetrischen Lastströme gelten (C.2) und (C.3). Sie sind im Arbeitsblatt bereits eingezeichnet.
= 4
(C.2)
i V = î sin t – 2 3 + ; i W = î sin t + 2 3 +
(C.3)
i U = î sin t + ;
id
Ud/2
0
+1
SU
Ud
Ud/2
U
uU
iU
uU0 i
-1 +1
V
V
SV
uV0
-1 +1
iW
W
SW
uW0
-1
Lk
sU
uV
eU
uW
eV
eW
0
t
uN0
Bild C.10. Links: Stromrichter mit Last, rechts: Schaltfunktion der Phase U
Zeichnen Sie im Lösungsblatt für die drei Phasen jeweils über zwei Perioden:
a) Die Schaltfunktionen sU, sV und sW mit den Phasenlagen:
s V = s U – 2 3 ; s W = s U + 2 3 ,
b) die drei Mittelpunktspannungen uU0, uV0 und uW0,
c) die Sternpunktspannung uN0,
d) die drei Phasenspannungen uU, uV und uW,
e) den Zwischenkreisstrom id.
f) Simulieren Sie die Schaltfunktion, die Spannungsverläufe und den Zwischenkreisstrom z.B. mit Simulink.
C.6 Stromrichter mit Grundfrequenzsteuerung 210
Arbeitsblatt:
U
t
V
t
W
t
Bild C.11. Lösungsblatt für Schaltfunktionen und Spannungen
(vorgegeben sind die Stromverläufe in den drei Phasen)
t
Bild C.12. Lösungsblatt für den Zwischenkreisstrom
211 C Übungen
C.7 Stromrichter mit zeitkontinuierlicher Modulation
Betrachtet wird der ideale zeitkontinuierliche, dreiphasige Stromrichter mit symmetrischer Last in Bild C.13.
id
Ud/2
mU
Ud
0
Ud/2
uU0
W
mW
iV
V
mV
uU
iU
U
uV0
iW
uW0
Lk
uV
eU
uW
eV
eW
uN0
Bild C.13. Modell der dreiphasigen Brücke mit Modulationsfunktionen
Die drei Modulationsfunktionen mU, mV und mW sind im stationären Betrieb symmetrisch und es gilt: m U = M sin t + 0 und m V = M sin t – 2 3 + 0
Die Zwischenkreisspannung beträgt: Ud = 600V und der maximal zulässige
Scheitelwert der Phasenströme:
î Ph = 50 A .
Bestimmen Sie:
a) Die Modulationsfunktion mW
b) die Scheitelwerte der Mittelpunktspannungen û U 0 , û V 0 und û W 0 bei M=1,
c) die Effektivwerte der Phasenspannungen UU, UV und UW bei M=1,
(wie unterscheiden sich die Phasen-von den Mittelpunktspannungen?)
d) die Form (Begründung) und den Effektivwert der Phasenströme IU, IV und IW,
e) den Mittelwert des Zwischenkreisstromes Id bei maximaler Ausgangsleistung,
(Tipps: - bei welchem cos tritt die maximale Ausgangsleistung auf?
- wie gross sind die Verluste im Stromrichter?)
f) wenn Sie die Halbleiter in den ‚Schaltern‘ SU, SV und SW dimensionieren:
welche Nenndaten für Strom und Spannung verwenden Sie etwa?
g) für welche Untersuchungen werden Stromrichter zeitkontinuierlich modelliert?
C.8 Stromregelungen 212
C.8 Stromregelungen
C.8.1 Stromregelung in -Koordinaten
Betrachtet wird die identifizierte ASM in Sternschaltung mit den Daten:
- 400 V (verkettete Spannung!) / 15 A/ 50 Hz
- cos= 0.741;
P = 7 kW;
nn =1450 U/min
- RS = 0.7
Lh = 80 mH;
LS = LR= 85 mH;
Der Stromrichter selber kann pro Phase mit einer Verstärkung von 300 V modelliert werden (Tiefpasscharakteristik vernachlässigen).
a) Bestimmen Sie die Übertragungsfunktion Strom zu Spannung und legen Sie (ev. mit
Hilfe des Bodediagramms) einen PI-Stromregler aus (TN = ?). Wählen Sie dabei kP= 1.
b) Erstellen Sie in Simulink ein Lastmodell mit den gegebenen Elementen ohne Gegenspannung und testen Sie die Schrittantwort, sowie den Stromverlauf für einen Sollwert
von iref = 10 A sin(t) für eine Frequenz von 50 Hz.
Der Stromregler soll an der gegebenen ASM getestet werden:
c) Erstellen Sie in Simulink einen Generator für einen ‘rotierenden’ Stromsollwert Zeiger, die Regler für beide Komponenten und ein Stromrichtermodell in alles in Darstellung.
d) Modellieren Sie die Maschine mit Stromrichter und Regler.
Überprüfen Sie die Funktion mit einem Hochlauf der unbelastetenMaschine mit einem
Stromscheitelwert von 10A (entspricht etwa dem Leerlaufstrom).
C.8.2 Stromregelung in dq-Koordinaten
Betrachtet wird die ebenfalls früher identifiziert SM in Sternschaltung mit den Daten:
- 400 V (verkettete Spannung!) / 80 A/ 50 Hz
- P = 50 kW;
nn = 3000 U/min
- RS = 0.75
Ld = Lq= 5 mH; = 1.0 Vs;
Der Stromrichter selber kann pro Phase mit einer Verstärkung von 300 V modelliert werden (Tiefpasscharakteristik vernachlässigen).
a) Bestimmen Sie die Strom-Übertragungsfunktion und legen Sie (ev. mit Hilfe des Bodediagramms) einen PI-Stromregler im rotierenden Koordinatensystem aus (TN = ?).
Wählen Sie dabei kP = 1.
b) Testen Sie die Stromregelung in Simulink mit der gegebenen Maschine mit den Stromsollwerten:
id,ref = 0 A, iq,ref = 0.5 A, im Leerlauf (Kleinsignalverhalten ohne Begrenzung)
id,ref = 0 A, iq,ref = 50 A, für eine drehzahlproportionale Last, die bei synchroner Drehzahl etwa der Nennlast entspricht.
Betrachten Sie die Ströme auch in u,v,w- Darstellung.
213 C Übungen
C.9 Spannungs-Frequenz-Steuerung einer ASM
Gegeben sind die Typenschild-Daten einer ASM:
Nennspannung / -strom:
Aufgenommene Leistung im Nennarbeitspunkt:
Nennfrequenz / -drehzahl:
400V / 15A
7.8kW
50Hz / 1450 U/min
Die Maschine ist in Stern geschaltet; mit Messungen wurde ermittelt:
Strang-Widerstand der Primärwicklung bei 75°C: RS = 0.7
Ersatz-Streuung Stator und Rotor zusammen:
L = 9.5mH
Scheinleistung bei synchroner Drehzahl (Leerlauf): S0 = 6kVA
Nachfolgend sollen die Parameter für Kennliniensteuerungen ermittelt werden. Gearbeitet wird dazu mit der Ersatzschaltung in Bild C.14:
IS
RS
US
IR
L
Lh
Uq
Im
Z1
Z2
RR,/s
Bild C.14.
Ersatzschaltung für eine Spannungs-FrequenzSteuerung
Bestimmen Sie
a) den Leerlaufstrom bei Nennspannung und synchroner Drehzahl (Ann: R S 0 ).
b) die Induktivität Lh (RS vernachlässigen, R S 0 )
c) den Winkel von Strom zu Spannung im Nennbetrieb und damit anschliessend die
Impedanz Z2 für den gleichen Betriebsfall.
d) die Spannung Uq im Nennbetrieb mit Hilfe von Z2
e) den Strom Im im Nennbetrieb
Der Strom Im aus e) ist der Magnetisierungsstrom für Nennfluss der Maschine.
f) Die Statorfrequenz sei S= 0; Bestimmen Sie:
die Statorspannung US bei Nennfluss bei Moment Null und bei Nennstrom
g) Statorfrequenz sei gleich der Nennfrequenz; Bestimmen Sie:
die Statorspannung US bei Nennfluss a) bei Moment Null und b) bei Nennstrom
h) Skizzieren Sie die Spannungs-Frequenz-Kennlinien mit den berechneten Eckpunkten
für beide Fälle auf.
i) Wie verändern sich die notwendigen Kennlinien für eine Stator-Wicklungstemperatur
von 125°C?
C.9 Spannungs-Frequenz-Steuerung einer ASM 214
j) Bestimmen Sie analytisch die Spannungsanhebung in Funktion des gemessenen Statorstromes so, dass der Fluss lastunabhängig konstant bleibt.
k) Bestimmen Sie im Leerlauffall den Magnetisierungsstrom Im und den Fluss h bei
doppelter Nenn-Statorfrequenz (fn=50Hz), wenn die Statorspannung der Nennspannung entspricht.
l) Was geschieht, wenn die Erhöhung der Wicklungstemperatur bei der Kennliniensteuerung nicht berücksichtigt wird?
m)Realisieren Sie unter Verwendung des Modells für eine spannungsgespeiste ASM in
Simulink eine Spannungs-Frequenzsteuerung.
2
2
2
Führen Sie dazu die Spannung gemäss U S = I m R S + S L h + L .
215 C Übungen
C.10 Direkte Flussführung
Für eine Asynchronmaschine soll die direkte Führung des Statorflusses S (nachfolgend
nur mit bezeichnet) untersucht werden. Zur Vereinfachung wird der Statorwiderstand
RS für die folgenden Überlegungen vernachlässigt. Gespeist wird die Maschine aus einem idealen Stromrichter mit einer Zwischenkreisspannung von Ud=566V.
A) Zeitkontinuierliche Ausgangsgrössen des Stromrichters
Im ersten Teil wird der Stromrichter mit den Modulationsfunktionen mu,v,w(t) zeitkontinuierlich modelliert.
a) Zur Zeit t=0 ist der Statorfluss in der Maschine Null. Legen Sie an den drei Klemmen die Statorspannungen so an, dass nach 10ms der Fluss (1+j0)Vs beträgt.
Geben Sie die Spannungen in - und in uvw-Darstellung an.
b) Der Fluss soll bei konstanter Amplitude von 1Vs mit =314s-1 im Gegenuhrzeigersinn
drehen. Geben Sie die notwendige Spannung an.
(Hinweis: Schreiben Sie den Fluss in Polarkoordinaten an.)
c) Zeichnen Sie für die Zeitpunkte t=0 und t=/2 die Zeigerdiagramme für u und
. Massstäbe: : 2cm/Vs; u: 1cm/200V.
d) Bestimmen Sie für kontinuierliches Drehen mit =100s-1 und 1Vs den Modulationsgrad M.
e) Wie gross wird bei maximaler Stromrichteraussteuerung und =628s-1 der Flusszeiger wenn das Modulationsverfahren die Injektion einer dritten Harmonischen nutzt?
B) Zeitdiskrete Stromrichter-Ausgangsgrössen
Am Stromrichter können die 6 spannungsbildenden und zwei Null-Zustände eingestellt
werden. Für den Statorfluss gilt zur Zeit t=0 1ej/6Vs.
f) Welche ‚Länge‘ haben die spannungsbildenden Zeiger?
g) Welcher Spannungszeiger muss eingeschaltet werden, damit sich mit maximaler
Geschwindigkeit in Gegenuhrzeiger-Richtung dreht?
h) Welcher Spannungszeiger muss eingeschaltet werden, damit sich mit maximaler
Geschwindigkeit in Uhrzeiger-Richtung dreht?
i) Wie gross wird die Winkelgeschwindigkeit des Flusses in beiden Fällen?
k) Was geschieht mit dem Fluss bei Spannung Null und einem Statorwiderstand ungleich
Null.
l) Welche Nullzustände 0Z , 7Z müssen für jeden der aktiven Zuständ 1Z bis 6Z gewählt
werden, damit jeweils nur in einem Brückenzweig geschaltet wird (minimieren der
Schaltverluste)?
C.11 Fluss-und Drehzahl-Berechnung für eine ASM-Regelung 216
C.11 Fluss-und Drehzahl-Berechnung für eine ASM-Regelung
Bei der flussorientierten Beschreibung wird das Koordinatensystem sehr häufig auf den
Rotorfluss orientiert. Dazu wird die Lage des aktuellen Rotorflusses benötigt. Da sich
dieser nur schlecht messen lässt, wird er in den meisten Fällen aus den messbaren Statorgrössen Spannung und Strom berechnet. Mit einer Simulation entsprechend dem Blockschaltbild in Bild C.15 soll die Übereinstimmung der Berechung mit dem ‚wirklichen‘
Fluss im Maschinenmodell für Spannungsspeisung überprüft werden. Anschliessend sollen daraus der Betrag des Flusses und die Lage des Flusszeigers ( Lage des Rotorfluss
orientierten Koordinatensystems!) bestimmt werden.
ML
uS
ASM mit
SpannungSpeisung
Fluss- und
DrehzahlRechner
R
me
iS
R
R
(R)=K
Bild C.15.
Struktur für die Simulation eines Fluss- und
Drehzahlrechners
A) Maschinenmodell und Flussrechner
a)Modellieren Sie die ASM mit Spannungsspeisung und Lastmoment Null. Verwenden
Sie dazu die Daten der Maschine in Kapitel C.1.2. Als Eingangsspannung kann direkt
400V/ 50Hz verwendet werden (am einfachsten als Zeiger in -Darstellung modellieren). Berechnen Sie parallel dazu den Rotorfluss R wie in Kapitel 6.1.4 vorgestellt
und vergleichen Sie die Resultate. Lassen Sie g am Anfang weg.
(g wird notwendig, wenn die Daten von Strecke und Modell nicht übereinstimmen.)
b)Bestimmen Sie aus den beiden Komponenten des Rotorflusses R den Betrag des Flusses R und den Winkel des Zeigers. (Wenn der Rotorflusszeiger auf der reellen
Achse des rotierendenen Koordinatensystems liegen soll, ist der Winkel direkt der
Winkel der reellen Achse!)
217 C Übungen
C.12 Sanftanlauf einer Asynchronmaschine
Grössere Asynchronmaschinen werden häufig über Sanftanlasser (Soft-Starter) hochgefahren. Dazu werden Wechselstromsteller (AC-Steller, Phasenanschnittsteuerung) eingesetzt, bei denen der Steuerwinkel mittels einer Stromregelung geführt wird. Bei dieser
Maschinenspeisung ist die Frequenz am Ein- und Ausgang des Stellers immer gleich der
Netzfrequenz. Durch den Phasenanschnitt entstehen in der Spannung Harmonische, die
aber für die nachfolgenden Betrachtungen vorerst vernachlässigt werden.
Über eine Stromregelung wird der Strom bis zur Vollaussteuerung des AC-Stellers auf
den vorgegebenen Sollwert geregelt (z.B. auf doppelten Nennstrom). Ab der Vollaussteuerung kann der Strom nicht mehr geregelt werden - er stellt sich abhängig von der
Belastung ein. Die Maschine wird mit einer Spannung mit fester Frequenz und Amplitude gespeist.
Der Stromrichter, der das Ansteuersignal in ein Wechselspannungssignal mit konstanter Frequenz und variabler Amplitude umsetzt, macht damit im Prinzip eine Transformation von einem rotierenden auf ein stillstehendes Koordinatensystem.
Ausgangslage, Regelkonzept:
Gegeben sei die Muster-ASM aus Übung C.1.2. Der Strom wird auf den Betrag des Stator-Stromzeigers geregelt, da ja der Betrag für die Netzbelastung verantwortlich ist. (Die
Regelung auf einen Fluss ist nicht möglich, da mit einem Wechselspannungssteller der
Winkel der Spannung nicht frei gestellt werden kann!) Hochgefahren soll mit doppeltem
Nennstrom werden (wie lange ist der Strom-Zeiger?) Zu Beginn ist die Maschine im
Leerlauf, das Nennmoment wird nach 1 s zugeschaltet.
Das Massenträgheitsmoment von Maschine und Last beträgt Jtot= 0.15mkg/s2.
Reglerauslegung:
Es zeigt sich, dass die Regelung mit der folgenden vereinfachten Gleichung für die Statorspannung ausgelegt werden kann:
di
u s = R S i S + -------S- 2L R S
dt
(C.4)
a)Legen Sie mit den vorhergeheden Angaben einen Stromregler aus. Die Proportionalverstärkung kP soll in einem ersten Schritt zu eins gewählt werden. Bestimmen Sie kI.
b)Simulieren Sie einen Hochlaufvorgang mit dem gegebenen Regler mit Hilfe des vorgegebenen Modells.
c)Diskutieren Sie den Hochlaufvorgang und den resultierenden Verlauf des Statorflusses.
C.13 SM geregelt auf (fast) minimalen Statorstrom 218
C.13 SM geregelt auf (fast) minimalen Statorstrom
Betrachtet wird die Muster-SM aus Kapitel C.1.3.1 mit den Daten:
-
Spannung:
Strom:
Leistung:
Drehzahl:
400V / 50Hz (verkettete Spannung!)
80A
50kW
(Motorbetrieb, abgegebene Leistung an der Welle)
3000 U/min.
Weiter sind bekannt: RS= 75m; Ld= 12 mH; Lq= 4.7 mH;
Die Maschine wird so geregelt, dass der Strom Id= 0 und Iq= 80 A betragen.
a)Bestimmen Sie über innere Leistung der Maschine die Polradspannung UP bei Nennleistung (stationärer Betrieb pro Phase und dann auf Zeiger umrechnen).
b)Bestimmen Sie den cos der Statorgrössen und die Statorspannung uS als Phasenspannung und als Zeiger.
c)Bestimmen Sie die Stator-Wirk- und Blindleistung PS und QS.
d)Wenn der notwendige Spannungsbedarf mit dem bei Nenndaten verglichen wird:
Wie ändert der cos gegenüber der einfachen Spannungsspeisung mit 400 V?
219 C Übungen
C.14 Elektronisch kommutierte Maschine
Eine elektronisch kommutierte Maschine (EK-M) wird mit einem Stromrichter gemäss
Bild C.16 angespeist. Für den Stator der Maschine gilt die dargestellte symmetrische Ersatzschaltung. Jede Phase wird während je 120 Grad positiv und negativ bestromt. Strom
und Spannung sind in Phase.
id
Ud/2
Ud
Ud/2
mU
V
mV
W
uU
iU
U
uUV
uVW
mW
iV
iW
RU
LU
RV
LV
RW
LW
eU
eV
eW
Bild C.16. Bürstenlose GM mit momentaner Anspeisung über die Phasen U und V. W ist offen.
Die Zwischenkreisspannung Ud ist 300 V und der ohmsche Widerstand pro Phase 1.
Bei 5000 U/min beträgt die Leistung der Maschine 1 kW und die induzierte Spannung ist
e=100 V.
Bestimmen Sie im gegebenen Betriebspunkt:
a) Den Phasenstrom i,
b) die Phasenspannung u,
c) Spannungsabfall pro Widerstand und Verluste in allen Widerständen und
d) die Klemmenspannung uUV.
e) Die Modulationsgrade MU und MV, sowie den Zwischenkreisstrom id.
C.14 Elektronisch kommutierte Maschine 220
D Musterlösungen
D.1 Identifikation von Maschinen
D.1.1 Gleichstrommaschine
D.1.1.1 Bestimmen der Elemente der GM-Ersatzschaltung
a) Rotorwiderstand RA und Rotorinduktivität LA:
R A = U A I A = 0.502 und = L R
L = 7.5mH
b) Erregerwiderstand RE und Erregerinduktivität LE:
R E = U E I E = 220 und = L R
L = 1H
c) Flussverkettung bei Nennerregung und Nennlast:
= e = U A – R A I A = 1.383Vs
d) Mechanisches Drehmoment Mme an der Welle:
M me = P = 27.8Nm oder
M el = I A n = 28.6Nm
Woher könnte der Unterschied kommen?
e) Reibungs- und Lüfterverluste PV,me:
P V me = P Ein – P V el – P me = 196W
f) Wirkungsgrad im Nennpunkt:
P me
= ----------------------------------------- = 0.902
P Ein + P Erregung
g) Massenträgheitsmoment J unter Vernachlässigung der mechanischen Verluste:
M me
= ----------t
J
M me
2
2
- = 0.286Nms = 0.286kgm
J = --------------- t
h) Die Drehzahl (in rad/s und U/min) bei Nennspannung und Leerlauf, bei halbem NennErregerstrom (vernachlässigen von Lüfter- und Reibverlusten, d.h. e = u A ):
D.1 Identifikation von Maschinen 222
U A = e =
= U A n 2 = 434s
–1
i) Maximales elektrisches Drehmoment bei Nennstrom und halbem Erregerstrom.
M el = 2 I n = 14.3Nm
D.1.1.2 Übertragungsfunktionen der GM
a) Übertragungsfunktion des Erregerkreises:
1
1
1 220 G E s = I E s U E s = ---------------------= ----------------------------------- = ---------------------------R E + sL E
220 + s1.0H
1 + s 220
b) Übertragungsfunktion der blockierte Maschine:
1
1
1 0.502G A s = I A s U A s = ---------------------= -------------------------------------------- = -----------------------R A + sL A
0.502 + s7.5mH
1 + s0.015
c) Übertragungsfunktion Drehzahl zu Rotorstrom:
1
1
4.98 1 As
G s = me s I A s = ------ = ----------------------------- basierend auf: = --- M dt = --- I A dt
J
J
sJ
s
D.1.1.3 Ankerstrom und Drehzahlregler
e
kP
kI
1/s
+
u
+
Bild 6.44. Struktur PI-Regler
Es werden die Koeffizienten für die Regler angegeben:
a) PI-Regler für den Erregerstrom:
kI =1/TN = 220, kp kann theoretisch sehr gross gewählt werden. Wegen Rauschens wird
aber die Begrenzung auf etwa kP = 10 empfohlen.
b) Ankerstrom-Regler für die blockierte Maschine bei Nennfluss:
kI = 1/TN = 67, kp kann sehr gross gewählt werden. Wegen Rauschens ebenfalls kP = 10.
Die Grenzfrequenz des geschlossenen Stromregelreises ist ca. G,I= 1300 rad/s.
c) Die Reglerauslegung für die Drehzahlregelung muss nach dem symmetrischen Optimum erfolgen, d.h. die Eckfrequenz des PI-Reglers auf einen Zehntel von G,I legen.
Damit wird kI, =1/TN = 130 und die resultierende optimale Verstärkung kp, = 100.
Beachte: In der gewählten linearen Regelstruktur wird der Strom im Unterlagerten
Stromregelkreis sehr gross, was praktisch nicht zulässig ist. Es müssen Strombegrenzungen eingeführt werden! Diese verlangen dann aber nach 'Anti-Wind-Up' Strukturen
für den Drehzahlregler.
223 D Musterlösungen
D.1.2 Käfigläufer - Asynchronmaschine
D.1.2.1 Bestimmen der Elemente der ASM-Ersatzschaltung
a) Polpaarzahl der Maschine: Bei 50 Hz beträgt die synchrone ‚elektrische Drehzahl des
Feldes‘ 3000U/min für eine Maschine mit 1 Polpaar. Entsprechend bei 2 Polpaaren
1500 U/min was unter Berücksichtigung des Schlupfes etwa den 1450 U/min entspricht; d.h. die Maschine hat zwei Polpaare.
me = 2 f me = 151.8s
– p
s
–1
s
me
- = 3.33%
und damit: s = -------------------------
b) Stillstandsmessung (RFe und Lh werden für die Berechnung vernachlässigt)
2
P = 3 R S + R R I S
2
Und mit Q =
R R = 0.6
2
S – P und der Annahme, dass L S = L R :
2
Q = 3 L S + L R I S
L S = L R = 4.77mH
c) Hauptinduktivität Lh und Verlustwiderstand RFe aus der Leerlaufmessung.
Aus der Leerlauf-Scheinleistung wird zuerst der Strom berechnet:
I S = S 0 U S 3 = 8.7 A und damit Wirk und Blindleistung pro Strang in RS und LS.
2
2
Q LS = L S I S = 113VAr
P R S = R S I S = 53W ;
Im nächsten Schritt wird die Scheinleistung Sh von Hauptinduktivität und Eisenverlustwiderstand bestimmt:
Q0 =
2
2
S 0 – P 0 = 5992VAr ;
U qI S = Sh =
2
2
Qh + Ph
Q
Q h = ------0 – Q LS = 1884VAr;
3
P
P h = -----0- – P R S = 47W
3
U q = S h I S = 217V
Und schliesslich:
2
R Fe = U q P Fe = 1k;
2
L h = U q Q h = 79.6mH
d) Die effektiv abgegebene Leistung Pme und den Wirkungsgrad der Maschine bei
Nennbetrieb. (Hinweis: zuerst die Spannung über der Hauptinduktivität berechnen.)
1–s
R me = R R ----------- = 17.4;
s
Z R = jL R + R R + R me = 18 + j1.5
D.1 Identifikation von Maschinen 224
Z h Z R
U h = U 1 ------------------------------ = 208V
Z S + Z h Z R
Z h Z R = 11 + j8.85 ;
Aus der Spannung über der Hauptinduktivität lässt sich anschliessend der Rotorstrom
und die Leistung im mechanischen Widerstand berechnen:
I R = U h Z R = 11.5 A;
2
P me = 3R me I R = 6.9kW
Und für den Wirkungsgrad resultiert:
P me
P me
= --------- = ---------------------- = 0.90
P ein
3UI cos
D.1.2.2 Simulation von Drehmoment und Strom der ASM
Moment und Betrag des Statorstromes sind in Kapitel 4.2.2 dargestellt. Daher wird keine
explizite Musterlösung abgegeben.
D.1.3 Synchronmaschinen
a) Strangspannung US bei einer Stern-Ersatzschaltung.
U S Phase = 400V 3 = 231V
b) cos und Winkel der Klemmengrössen im gemessenen Arbeitspunkt.
cos = P S = P n U n I n 3 = 50kW 54.7 kVA = 0.914
= 23.9
c) Das Nennmoment Mn bei den Nenndaten.
M n = P n n = 50kW 314s
–1
= 159Nm
d) Die Impedanzen Xd und Xq aus Strom und Spannung.
Aufteilen der Statorspannung in d- und q-Komponente:
U d = – 400V 3 sin 30 = – 115.5V
U q = 400V 3 cos 30 = 200V
IS eilt bezüglich US nach: Phasenlage im dq-System: = – = 30 – 23.9 = 6.1
Aufteilen des Statorstromes in die d- und q-Komponente:
225 D Musterlösungen
I S d = – 79 A sin 6.1 = – 8.4 A
I S q = 79 A cos 6.1 = 78.6 A
q
US
UP
IdXd
US,q
IS
Iq
Ud = UX,d
Id
d
Bild 6.45. Statorspannungen und Ströme der SM
U d = – X q I q = – S L q I q = – 115.5V
U q = X d I d + U P = S L d I d + U P = 200V
X q = 115.5V
------------------ = 1.47
78.6 A
200V – 231V
X d = --------------------------------- = 3.69
– 8.4 A
e) Das Verhältnis Xd / Xq stimmt sehr gut mit der Schlupfmessung überein.
f) IS bei Nenn- Statorspannung und -leistung bei einem cosan den Klemmen von 1 und
Vernachlässigung des Statorwiderstandes:
I S = P 3U S = 50kW 3 400V = 72.1 A
Der coslässt sich über die Polradspannung (Erregung) beeinflussen.
D.1.3.1 Erregerkreis
Für den Erregerkreis liest man vom Typenschild: UE,n=60V; IE,n=20A. Das Kurzschliessen der bestromten Erregerwicklung ergab eine Abkling-Zeitkonstante von 0.8s.
D.1 Identifikation von Maschinen 226
a) Erregerleistung im Nennpunkt PE,n
P E n = U E n I E n = 60V 20 A = 1.2kW
b) Erregerwiderstand RE
R E = U E n I E n = 60V 20 A = 3
c) die Erregerinduktivität LE
= L E R E = 0.8s
L E = 0.8s 3 = 2.4H
d)Wirkungsgrad bei Nenndaten (Stator- und Erregerkreis)
P mech
50kW
= ------------------------------------------------= ------------------------------------------------------------ = 0.95
2
P RS + P Err + P mech
3R S I S + 1.2kW + 50kW
227 D Musterlösungen
D.2 Drehfeld und Raumzeiger
D.2.1 Erzeugung eines Drehfeldes
a) Beiträge der drei Phasen zur Feldstärke H. beim Scheitelwert des Stromes:
Bei der vorgegebenen hohen Permeabilität des Eisens kann der Eisenweg vernachlässigt werden und die Betrachtung auf den Luftspalt begrenzt werden. Dabei ist zu beachten, dass der Fluss den Luftspalt zweimal quert und dass zwei Leiterbündel zur
Feldstärke beitragen.
4
Es gilt das Durchflutungsgesetzt: ni = H dl und damit H = 2ni 2l = i 10 m
b) Teil-Feldstärken HU,V,W()
Für den Zeitpunkt t = 3 resultieren für
i U = 1 cos 3 = 0.5
H U = 5k A m
i V = 1 cos 3 – 2 3 = 0.5
i W = 1 cos 3 – 4 3 = – 1
H
10kA/m
H V = 5k A m
H U = – 10k A m
HW
HU
HV iV
iU
iW
iV
iU
iW
iV
iV
iU
iW
iV
-10kA/m
Bild D.1. Teil-Feldstärken HU,V,W()
H
20kA/m
B
H
iV
iU
iW
-20kA/m
Bild D.2. Summenfeld H() und d) Grundschwingung der Flussdichte B1()
c) Scheitelwert der magnetischen Flussdichte Bim Luftspalt.
–3
B = 0 H = 810 Vs m
2
D.2 Drehfeld und Raumzeiger 228
D.2.2 Zeigerdarstellung eines Drehfeldes
Beiträge zur Flussdichte der drei Phasen in uvw- und -Darstellung:
t
BU
BV
BW
B
B
B
0
1
0.71
0
-1
0
-0.5
0.26
0.87
0.5
-0.87
-0.5
-0.97
-0.87
0.5
0.86
1
0.71
0
-1
0
0
0.71
1
0
-1
1
1
1
1
1
Die Tabelle zeigt, dass die Amplitude von B konstant bleibt!
V
1
1
U
1
-1
t=3/2
W
-1
Bild D.3. Raumzeiger von B in der -Ebene
t=/4
t=0
t=
-1
1
t=/2
-1
229 D Musterlösungen
D.2.3 Koordinatentransformationen
D.2.3.1 uvw->-Koordinatentransformation
xU
xV
xW
2
+
-
1/3
+
-
0.577
x
xU
x
xV
xW
3Ph
x
x
Bild D.4. u,v,w- -Transformator
b) Raumzeigerberechnung aus den verketteten Spannungen:
u U = u UV – u WU 3 ; u V = u VW – u UV 3 ; u U = u WU – u VW 3
u = u UV – u WU 3 ; u = u VW 3
c) Verkettete Spannungen aus den Raumzeigern:
u UV = 3u – 3u 2; u VW =
3u ; u WU = – 3 u – 3u 2
D.2.3.2 Umrechnungen zwischen zwei Koordinatensystemen
Der stehende Zeiger hat eine Länge von 5V und liegt -System auf der reellen Achse.
Er wird in zwei weiteren Systemen bei t = 0 und t =1s beschrieben:
- im gegenüber dem -System mit = 3 + t drehend xy-System
- im gegenüber dem -System mit = 2 + 2t drehend dq-System
a) t=0
x = 5V
x xy = 5V e
b) t=1s
x = 5V
– j 3
= 2.5 – j4.33 V
x xy = 5V e
– j 2
= 0 – j5 V
x dq = 5V e
x dq = 5V e
– j 4 3
= – 2.5 + j4.33 V
– j 5 2
= 0 – j5 V
c) Direkte Transformation zwischen dem xy- und dem dq-System:
D.2 Drehfeld und Raumzeiger 230
x xy = x e
x = x xy e
– j xy
j xy
;
x dq = x e
= x dq e
x xy = x dq e
– j dq
j dq
j dq – xy
x dq = x xy e
j xy – dq
231 D Musterlösungen
D.3 Maschinendarstellung mit Raumzeigern
D.3.1 Asynchronmaschinen
D.3.1.1 Strom, Fluss, Drehmoment im - Koordinatensystem
Von einer Käfigläufer-ASM mit einem Polpaar sind in einem bestimmten Zeitpunkt der
Statorfluss S=j2 als Raumzeiger und die drei Statorströme iU, iV und iW gegeben:
a) Raumzeiger IS,:
Gegeben sind die Ströme:
i U = 2 A cos ; i V = 2 A cos – 2 3 ; i W = 2 A cos + 2 3 ; = 3
Für die zugehörigen Raumzeiger gilt:
A- 2 cos – cos –------ – cos = 1 A
i S = 1--- 2i U – i V – i W = 2------- 3
3
3
3
1- i – i = -----2 A- cos –------ – cos = 1.73 A
i S = -----V
W
3
3
3
S
iS,
iS,
Bild D.5.
b) Strom und Flusszeiger in der -Ebene
c) Drehmoment:
3
M mech = --- Im S i S =
2
3--- Im j
=
– S iS
2
3
--- Im S – j S i S + ji S
2
= – 3Nm
D.3 Maschinendarstellung mit Raumzeigern 232
D.3.1.2 Spannungsgespeiste ASM in verschiedenen Koordinatensystemen
Die Lösungen zu dieser Aufgabe sind im Stoff vorgestellt.
233 D Musterlösungen
D.3.2 Synchronmaschinen
Umrechnung zwischen statorfesten - und rotorfesten dq-Grössen;
Erstellen von Blockdiagrammen.
D.3.2.1 Klemmenspannung der Synchronmaschine
Die SM rotiert mit der Drehzahl 2000 U/min so, dass das dq-Koordinatensystem im Gegenuhrzeigersinn dreht. Die Polpaarzahl ist p=1
q
US
d
(t)
Bild D.6.
Zeigertransformation -dq-System
Zur Zeit t=0 beträgt der Spannungszeiger im dq-System uS=(100+j200)V und das dq-System ist bezüglich dem stillstehenden -System um den Winkel =/2 verdreht.
Bestimmen Sie im Zeitpunkt t=12ms:
a) Drehzahl des dq-Koordinatensystems
Min- = 209.4s – 1
K = 2 2000U
-----------------------------60
b) Winkel (t) des dq-Koordinatensystems
–1
t = 12ms = 209.4s 12ms + 2 = 4.08rad
c) Spannungen uS und uS
u S dq = 100 + j200 V = 224V e
S
= u S dq e
j
= 224V e
j1.11
j1.11 j4.08
e
d) die Spannungen uU, uVund uW
u U = u S = 103V
u V = – u S + 3u S 2 = – 223 V
u W = – u S – 3u S 2 = 120 V
= 224V e
j5.19
= 103 – j199 V
D.3 Maschinendarstellung mit Raumzeigern 234
D.3.2.2 Blockschaltung des Erregerkreises der SM
Erregerkreis einer SM ohne Dämpferwicklung. Der Stator wird mit Stromquellen gespeist, der Erregerkreis aus einer Spannungsquelle.
a) Blockschaltbild des Erregerkreises.
Ausgangsgleichungen:
E = u E – R E i E dt und i E = E – L dE i d L E
-
RE
uE
+
id
LdE
1/s
E
+
-
q
iE
1/LE
Bild 6.46. Blockschaltbild des Errregerkreises
b) Bei konstanter Erregerspannung variiert der Erregerstrom in Funktion der d- Komponente des Statorstromes als Folge der transformatorischen Kopplung.
D.3.2.3 SM -Blockschaltung bei Ld=Lq
Betrachtet wird eine SM ohne Dämpfer mit Stromspeisung, bei der die Längsinduktivität
gleich der Querinduktivität ist, d.h. Ld=Lq. Der Erregerfluss sei konstant = 0.
a) Drehmomentgleichung für Ld = Lq.
M = 3------p- i q L d i d + 0 – i d L q i q
2
M = 3------p- 0 i q
2
b) Zeichen Sie das Blockdiagramm für Drehmoment und Drehzahl bei Stromspeisung.
0
iq
MLast
*
*
3p/2
+
-
1/s
1/J
me
Bild 6.47. Drehzahl bei Stromspeisung
235 D Musterlösungen
D.4 Gleichrichter
Ungesteuerte Gleichrichterbrücke mit und ohne Glättungsdrossel Ld im Zwischenkreis.
Erster Teil: Die Zwischenkreisdrossel Ld ist sehr klein und wird vernachlässigt:
a) Die Nenn-Netzspannung mit der die Brücke gespeist wird:
U d 2U N
U N = U d 2 = 389V
b) den Strommittelwert in der Last IL,d:
I L d = U d R L = 550V 40 = 13.8 A
c) den Strommittelwert ID,d durch die Diode:
I D d = I d L 3 = 4.6 A
d) die Stromeffektivwerte im Netz IN, in der Diode ID und im Kondensator IC
IL
1
- = 0.064
t E' --------------- ------------p N û N C d
t E = t E'T = 1.28ms
I d L
I N eff = --------- 1 t E' = 18.1 A
3
I d L
I D eff = --------- 1 2t E' = 12.8 A
3
1
I C eff = I d L -------- – 1 = 17.4 A
6t E'
e) die Leitverluste in der Diode PD,V:
2
P D V = U F 0 I D d + r d I D eff = 6.5W (pro Diode!)
f) die Verluste im Kondensator PC,V:
2
P C V = r ESR I C eff = 4.5W
g) die Scheinleistung im Netz SN:
SN =
3U N I N eff = 12.5kVA
h) die Wirkleistung im Netz PN (bei verlustlosen Elementen):
P N = U d L I d L = 7 56kW
D.4 Gleichrichter 236
i) die Blindleistung im Netz QN
QN =
2
2
S N – P N = 10kVA
k) den Leistungsfaktor N im Netz:
= P N S N = 7 56kW 12.5kVA = 0.60
Zweiter Teil: Die Zwischenkreisdrossel Ld sei sehr gross.
iD(t)
iN(t)
T
t
T
Bild D.7. Stromverläufe in einer Diode und in einer Netzzuleitung
a) Die Nenn-Netzspannung mit der die Brücke gespeist wird:
U d = 1.35U N = 540V
b) den Strommittelwert in der Last IL,d:
I L d = U d R L = 540V 40 = 13.5 A
c) den Strommittelwert Id,D durch die Diode:
I D d = I L d 3 = 4.5 A
d) die Stromeffektivwerte im Netz IN, in der Diode ID und im Kondensator IC
I N eff = I L d 2 3 = 11 A
I D eff = I L d 1 3 = 7.8 A
Da der Laststrom durch die Induktivität vollständig geglättet ist, ist die Spannung
über dem Kondensator konstant, d.h. der Kondensatorstrom wird Null!
e) die Leitverluste in der Diode PD,V:
2
P D V = U F 0 I D d + r d I D eff = 4.4W (pro Diode!)
f) Im Kondensator treten ohne Strom keine Verluste auf.
g) die Scheinleistung im Netz SN:
SN =
3U N I N eff = 7.6kVA
t
237 D Musterlösungen
h) die Wirkleistung im Netz PN (bei verlustlosen Elementen):
P N = U L d I L d = 7.29kW
i) die Blindleistung im Netz QN
QN =
2
2
S N – P N = 2.2kVAr
k) den Leistungsfaktor N im Netz:
= P N S N = 7.29kW 7.62kVA = 0.96
- Charakteristische Unterschiede zwischen den beiden Bauformen:
Bei guter induktiver Glättung ist:
- die Ausgangsspannung geringfügig kleiner als bei rein kapazitiver Glättung
- der Effektivwert des Diodenstromes und damit der Verluste im Halbleiter signifikant
kleiner
- der Effektivwert des Netzstromes ist ebenfalls wesentlich kleiner als bei kapazitiver
Glättung und damit der Leistungsfaktor wesentlich grösser.
D.5 Auslegung eines Stromrichters 238
D.5 Auslegung eines Stromrichters
Eckdaten, Ansteuerung:
a) IGBT_Daten:
Spannung: û = 400V 2 = 566V ; d.h. mit Faktor zwei Reserve 1200V Elemente.
Strom: î = S 2 U n 3 = 20kVA 2 400V 3 = 41 A mit Faktor 2 ein 80A Element.
Die vorgegebenen Module mit 1200V / 75A passen mit dem Sicherheitsfaktor zwei.
b) Ansteuerleistung
Die Gateladung bei einer Gatespannung von 0V auf 15V ist mit 400nC gegeben.
Für die Energie, die pro Schaltvorgang aufgewendet werden muss gilt: W = U G Q G .
Damit resultiert: W = 15V 400nC = 6W . Multipliziert mit der Frequenz von 8kHz erhält man pro IGBT 48 mW, d.h. ca. 0.3W für alle 6 Schalter.
Verluste, Kühlung:
c) Verluste bei (fast) Vollaussteuerung im Stromscheitelwert:
Für alle beteiligten IGBT kann die gleiche Ersatzschaltung verwendet werden:
UF0 = 1.8V; rF = 38 m.
Für den IGBT mit dem vollen Strom gilt:
2
P V Leit = U F 0 I d + r F I eff = 1.8V 40 A + 38m 40 A = 132W
P V Schalt = E on + E off I d f S = 6 + 4 mWs8kHz = 80W
P V tot = 212W
Für die beiden IGBT mit dem halben Strom resultiert je:
2
P V Leit = U F 0 I d + r F I eff = 1.8V 20 A + 38m 20 A = 51W
P V Schalt = E on + E off I d f S = 4 + 2 mWs8kHz = 48W
P V tot = 99W
Die gesamte Verlustleistung beträgt damit PV= 410W.
Für die absolute Kühlkörpertemperatur resultiert bei der Umgebungstemperatur von 40
Grad C:
K
K = P V R thKU + U = 410W 0.12 ----- + 40C = 89.2C
W
239 D Musterlösungen
Und für die Temperatur des am höchsten belasteten dauernd leitenden Halbleiters:
K- + 89C = 157C
J = P V R thJG + R thGK + K = 212W 0.32 ---W
Der Betriebsfall ist damit nicht mehr zulässig!
d) Verluste bei Ausgangsspannung Null und Frequenz Null:
Die Ströme in den IGBT und den Dioden sind rechteckförmig mit einer Einschaltdauer
von 50%. Bezogen auf den Maximalwert î wird der Mittelwert î/2 und der Effektivwert
î 0.5 , d.h. I d = 40 A 2 = 20 A und I eff = 40 A 0.71 = 28 A .
Für den IGBT mit dem vollen Strom gilt damit:
2
P V Leit = U F 0 I d + r F I eff = 1.8V 20 A + 38m 28 A = 66W
P V Schalt = E on + E off I d f S = 6 + 4 mWs8kHz = 80W
P V tot = 146W
Für die zum IGBT gehörende Freilaufdiode resultiert:
2
P V Leit = U F 0 I d + r F I eff = 1.2V 20 A + 26m 28 A = 44W
Für das ganze Modul resultiert damit eine Verlustleistung von 190W.
Für die beiden IGBT und Dioden, die mit halbem Strom betrieben werden gilt je:
I d = 20 A 2 = 10 A und I eff = 20 A 0.71 = 14 A und damit für die Verluste:
2
P V Leit = U F 0 I d + r F I eff = 1.8V 10 A + 38m 14 A = 25W
P V Schalt = E on + E off I d f S = 4 + 2 mWs8kHz = 48W
P V tot = 73W
Für die Diode folgt schliesslich:
2
P V Leit = U F 0 I d + r F I eff = 1.2V 10 A + 26m 14 A = 17W
Pro Modul resultiert damit eine Verlustleistung von 90W.
Für alle drei Module zusammen ergibt die Rechnung 370W Verluste.
Für die absolute Kühlkörpertemperatur resultiert:
D.5 Auslegung eines Stromrichters 240
K- + 40C = 84.4C
K = P V R thKU + U = 370W 0.12 ---W
Und für die Modul-Temperatur des 40A leitenden IGBT‘s:
K- + 89C = 98.5C
M = P V R thMK + K = 190W 0.05 ---W
Als letztes resultieren für die Kristalltemperatur des IGBT‘s:
K- + 98.5C = 138C
J = P V R thJM + M = 146W 0.27 ---W
und für die Diode:
K
J = P V R thJM + M = 44W 0.6 ----- + 98.5C = 125C
W
Der Betriebsfall ist zulässig, der IGBT wird dabei aber sehr warm!
e) Wasserkühlung:
Für den Wärmefluss gilt:
130 – 82.5 C
P V = -------- = ------------------------------------------- = 106W
R th
0.4 + 0.05 K W
Wassermenge für die Abfuhr von 200W bei einer Temperaturdifferenz von 5 Grad:
200W
m = P c = ----------------------------------------------------- = 0.0096 kg s = 0.574 l min
4.18 kWs kgK 5K
241 D Musterlösungen
RC-Entlastung:
a) Noch zu berücksichtigende Induktivität
Berücksichtigt werden die halbe Kondensator und die halbe Aufbauinduktivität:
L' A = L A 2 + L C 2 = 40nH
b) Bestimmen Sie den Widerstand R
R S = 100V 40 A = 2.5
b) Bestimmen Sie den Kondensator so, dass der resultierende Wellenwiderstand dem Widerstand R entspricht.
R=
LA 2 CS
2
2
C = L R = 40nH 2.5 = 6.4nF
d)Berechnen Sie die auftretenden Verluste pro RC-Glied
Die Betriebsspannung beträgt 600V und für das Überschwingen wurden 100V angesetzt.
Damit beträgt die maximale Spannung am Kondensator 700V. Auf diese Spannung werden die Kondensatoren über den Widerstand aufgeladen und wieder entladen.
2
2
P = f S û CS C S = 8kHz 700V 6.4nF = 25W
Für alle 6 Schalter ergibt das 150W. Es kann nun versucht werden, aufgrund der Simulation/ Messungen den Entlastungskondensator zu verkleinern.
D.6 Stromrichter mit Grundfrequenzsteuerung 242
D.6 Stromrichter mit Grundfrequenzsteuerung
U
uU0, sU
uU
uN,0
t
V
uV0, sV
uV
uN,0
t
W
uW0, sW
uW
uN,0
t
Bild D.8. Schaltfunktion und auf ud/2 bezogene Spannungsverläufe in den drei Phasen U, V, W:
ausgezogen: Schaltfunktion und Mittelpunktspannung,
gestrichelt: Sternpunktspannung, punktiert: Phasenspannung
id
iW
iU
iV
t
Bild D.9. Auf î bezogene Ströme in den Phasen U, V und W,
zusammen mit dem Zwischenkreisstrom id
e) Für den Zwischenkreisstrom id gilt: i d = 1 2 i U s U + i V s V + i W s W
243 D Musterlösungen
D.7 Stromrichter mit zeitkontinuierlicher Modulation
a) Modulationsfunktion mV:
Damit die drei Funktionen symmetrisch sind, muss gelten:m W = M sin t – 4 3 + 0
b) Scheitelwerte der Mittelpunktspannungen û U 0 , û V 0 und û W 0 bei M=1:
M =1
û U 0 V 0 W 0 = U d 2 = 300V
c) Effektivwerte der Phasenspannungen UU, UV und UW bei M=1:
Bei qualitativ guter Modulation weisen die Wechselrichter-Ausgangsspannungen keine Gleichtaktkomponenten auf. Phasen und Mittelpunktspannungen sind damit identisch, bei der vorgegebenen Modulation sinusförmig. Es gilt:
û U V W = û U 0 V 0 W 0 = U d 2 = 300V
u U V W = û U V W 2 = 212V
d) Form und Effektivwert der Phasenströme IU, IV und IW:
Die Phasenströme sind sinusförmig, da die Spannungen über den Induktivitäten
u Lk = u U – e U als Differenz von zwei gleichfrequenten sinusförmigen Spannungen
sinusförmig sind:
I U V W = î Ph 2 = 50 A 2 = 35.4 A
e) Mittelwert des Zwischenkreisstromes Id bei maximaler Ausgangsleistung:
Bei verlustloser Schaltung und gegebenem Strom (35.4A) tritt die maximale Ausgangsleistung bei cos = 1 und maximaler Ausgangsspannung (212V) auf.
P max = 3U Ph max I Ph = 22.5kW
I d = P max U d = 37.5 A
f) Faustformel für die Dimensionierung der Halbleiter in den ‚Schaltern‘ SU, SV und SW
(Un, In, Nenndaten der Halbleiter):
û Betrieb U n 2
î Betrieb I n 2
U n 1200V
I n 100 A
g) Für die Untersuchung von Steuerungen und Regelungen und für GrundschwingungsLeistungsbetrachtungen werden Stromrichter idealerweise zeitkontinuierlich modelliert. Die Beschreibung mit Schaltfunktionen wird zu aufwendig und benötigt bei der
Simulation zuviel Rechenzeit.
D.8 Stromregelungen 244
D.8 Stromregelungen
D.8.1 Stromregelung in -Koordinaten
a) Strom-Übertragungsfunktion für den-Pfad und PI-Stromregler:
di
L -------- = u – Ri – e
dt
U e
1 - ------I = --------------------- - – -----
sL R + 1 R R
2
2
2
mit R = R S = 0.7 und L = L L R = 85mH – 80mH 85mH = 9.71mH
(D.1)
Daraus folgt für die Zeitkonstante = L R = 9.71mH 0.7 = 13.9ms . Diese entspricht direkt der Nachstellzeit des Reglers: TN 14 ms.
Da es sich um eine Strecke erster Ordnung handelt, könnte kP beliebig gross gewählt
werden und die Phasenreserve wäre immer 90 Grad. Deshalb wird kP= 1 vorgegeben.
b) Einphasiges Lastmodell für den Test:
Stromrichter
PI-Regler
kP=1;
TN= 14m
iSoll
m
k= 300V
u +
-
e/R
RLLast
iIst
iIst
Bild 6.48. Blockdiagramm der Stromregelung
Der Stromregler soll an der gegebenen ASM getestet werden:
c), d) Als Musterlösung ist das Simulink Modell gegeben:
D.8.2 Stromregelung in dq-Koordinaten
a) Strom-Übertragungsfunktion und PI-Stromregler im rotierenden Koordinatensystem:
di
L ------x- = u x – Ri x + K Li y
dt
K L
1 -U
X
I X = --------------------- --------- + I Y -----------
sL R + 1 R
R
di
L ------y- = u y – Ri y – K Li x – e
dt
K L e
U
1
I Y = ----------------------- -------Y- – I X ----------– ---
R
R
sL R + 1 R
mit R = R S = 0.75 und L = L d = L q = 5mH
(D.2)
245 D Musterlösungen
Für die Zeitkonstante resultiert = L R = 5mH 0.75 = 6.67ms . Diese entspricht
direkt der Nachstellzeit des Reglers und damit gilt kP= 1; TN = 6.7 ms.
b) Test der Maschine, mit den Stromsollwerten id,ref = 0 A, iq,ref = 50 A, für eine drehzahlproportionale Last, die bei synchroner Drehzahl der Nennlast entspricht.
–1
Für die Last gilt: M n = P n = 50kW 314s = 159Nm
- Bei einem Sollwert von 0.5 A bleibt m< 1 und die Stromverläufe zeigen die erwarteten Tiefpass-Verläufe.
- Beim Sollwert 50 A würde der m-Grad m> 1 und muss deshalb begrenzt werden. Dadurch überschiessen bei einer einfachen Begrenzung (kein Anti-Wind-Up) Spannungen und Ströme.
D.9 Spannungs-Frequenz-Steuerung einer ASM 246
D.9 Spannungs-Frequenz-Steuerung einer ASM
a) Leerlaufstrom bei Nennspannung und synchroner Drehzahl (Annahme: R S 0 ):
I 0 = S 0 3U N = 6kVA 400V 3 = 8.66 A
b) Induktivität Lh (bei Vernachlässigung von RS)
U S = I 0 2f L h + L
L h = U S I 0 2f – L = 75mH
c) Winkel zwischen Strom und Spannung im Nennbetrieb und Impedanz Z2.
Aufgrund der Last (ohmsch induktiv) ist bekannt, dass der Strom nacheilt:
cos = P S = 7.8kW 3 400V 15 A = 0.75
ui = – 41.4
U S n
400V 3
Z 2 = ----------- – Z 1 = ------------------------ 41.4 – 0.7 + j314 9.5mH = 13 33.5
15 A
I S n
d) Spannung Uq im Nennbetrieb mit Hilfe von Z2:
U q = I S n Z 2 n = 15 A 13 = 195V
e) Strom Im im Nennbetrieb:
I m n = U q n L h = 195V 314 75mH = 8.31 A
Der Strom Im,n=8.31A aus e) ist der Strom für Nennfluss der Maschine!
f) Die Statorfrequenz sei S=0s-1;
Statorspannung bei Nennfluss und Moment Null:
Bei S=0 treten keine induktiven Spannungsabfälle auf!
I S = I m n = 8.3 A
U S Ph = 0.78.31 A = 5.81V
Statorspannung bei Nennstrom (Moment nicht definiert):
I S = I S n = 15 A
U S Ph = 0.715 A = 10.5V
g) Statorfrequenz sei gleich der Nennfrequenz, S=314s-1;
Statorspannung bei Nennfluss und Moment Null:
Bei Moment Null fliesst im Rotorkreis kein Strom, d.h. R R s = !
I S = I m n = 8.31 A
U S = I S R S + j S L h + L = 220.4V
247 D Musterlösungen
Statorspannung bei Nennfluss und bei Nennstrom:
U S = 400V 3 = 230V
US
250V
230V
Nennlast
220V
Leerlauf
200V
50V
10.5V
5.8V
0V
10Hz
45Hz
50Hz fS
Bild D.10.
h) Spannungs-Frequenzkennlinien der ASM im
Leerlauf und bei Nennlast
i) Veränderung der Kennlinien bei einer Stator-Wicklungstemperatur von 125°C:
Der Kupferwiderstand steigt um den Faktor 0.004 C an. Bei der gegebenen Temperaturerhöhung von 50 °C entspricht das einer Widerstandserhöhung von 20%! Um diesen Wert muss die Spannung im Stillstand angehoben werden, d.h. 10.5V 12.6V und
5.8V 7.0V .
j) Spannungsanhebung in Funktion des gemessenen Statorstromes so, dass der Fluss lastunabhängig konstant bleibt:
Der Spannungsabfall über dem Statorwiderstand und der Statorstreuung muss kompensiert werden. Für US in Funktion des Statorstromes IS gilt:
U S = U q n + I S R S + jL mit U q n als Spannung über der Hauptinduktivität bei
Nennbetrieb.
k) Magnetisierungsstrom und Fluss bei doppelter Nenn-Statorfrequenz (fN,n=50Hz),
Nennspannung und Leerlauf: Im Leerlauf ist der Rotorwiderstand sehr gross und kann
vernachlässigt werden. Es gilt:
I S = U S n R S + j2 n L h + L = 4.33 A
h = L h I S = 75mH 4.33 A = 0.324Vs
l) Wird die Erhöhung der Wicklungstemperatur bei der Kennliniensteuerung nicht berücksichtigt, so nimmt der Magnetisierungsstrom (vor allem bei kleinen Frequenzen)
ab und es resultiert Feldschwächung.
D.10 Direkte Flussführung 248
D.10 Direkte Flussführung
Stromrichtergespeiste ASM mit RS=0 und Ud=566V.
A) Zeitkontinuierliche Ausgangsgrössen des Stromrichters
Der Stromrichter wird zeitkontinuierlich mit mu,v,w(t) modelliert.
a) Bei t=0 ist =0. Nach 10ms soll (1+j0)Vs betragen.
Für die notwendigen Spannungen resultieren:
u = d dt = 1 + j0 Vs 0.01s = 100V
uU = u ; uV = –u 2 ; uW = –u 2
b)=1Vs bei =314s-1 im Gegenuhrzeigersinn. Für die Spannung gilt:
= e
jt
; u = d dt = je
jt
= j314e
jt
c) Zeigerdiagramme für u und bei t=0 und t=/(2*314). : 2cm/Vs; u: 1cm/200V.
1
u
t=/2
t=0
u
1
d) M für kontinuierliches Drehen mit =100s-1 und 1:
Zeigerlänge U==100V; gilt auch für die Scheitelwerte der drei sinusförmigen Phasenspannungen. Daraus folgt für M:
û = M U d 2 ;
566
M = û U d 2 = 100V --------- = 0.353
2
e) Flusszeiger bei maximaler Stromrichteraussteuerung, =628s-1 und Injektion einer
dritten Harmonischen:
Der Spannungsscheitelwert pro Phase, und damit die Zeigerlänge bei sinusförmigen
Verläufen, beträgt 1.15Ud/2=325V. Für den Fluss gilt: =û/Vs.
249 D Musterlösungen
B) Zeitdiskrete Stromrichter-Ausgangsgrössen
Für den Statorfluss gilt zur Zeit t=0: 1ej/6Vs.
f) ‚Länge‘ der spannungsbildenden Zeiger: 2Ud/3.
g) Spannungszeiger so, dass sich mit maximaler Geschwindigkeit in GegenuhrzeigerRichtung dreht: der Spannungszeiger muss rechtwinklig zum Fluss stehen. -> 3U
h) Spannungszeiger so, dass sich mit maximaler Geschwindigkeit in Uhrzeiger-Richtung dreht: hier wird 6U notwendig.
i) Winkelgeschwindigkeit des Flusses in den beiden Fällen.
Beide Zeiger stehen senkrecht zum Fluss und es gilt gemäss Skizze:
d u S dt dt
Damit gilt: U= bzw. = U/Ud=377s-1.
d
1
u
1
k) Bei Spannung Null und einem Statorwiderstand ungleich Null gilt:
0 = R S i S + d dt ;
d dt = – R S i S
Der Fluss klingt also gegen Null ab!
l) Schalten zwischen aktiven- und Null-Zuständen mit minimalen Schaltvorgängen:
Aus 1Z, 3Z, 5Z muss 0Z gewählt werden und entsprechend aus 2Z, 4Z, 6Z : 7Z.
D.11 Fluss-und Drehzahl-Berechnung für eine ASM-Regelung
Zu dieser Übung wird keine Musterlösung abgegeben.
D.12 Sanftanlauf einer Asynchronmaschine 250
D.12 Sanftanlauf einer Asynchronmaschine
a) Auslegung des Stromreglers:
Mit der gegebenen Differentialgleichung für die Statorspannung:
di
u s = R S i S + -------S- 2L R S
dt
resultiert für Übertragungsfunktion Strom- zu Spannung der Maschine:
I S s
1 2L
105
-------------- = ---------------------------- = ------------------U Ss
s + R S 2L
s + 73.4
Der Regler muss noch mit Begrenzungen für den Integralteil und den gesamten Reglerausgang ausgelegt werden.
b) Simulation des Hochlaufvorganges
Bild D.11. Hochfahrvorgang der ASM mit Sanftanlauf
c) Interpretationen:
Sobald der Stromrichter voll ausgesteuert ist, kann der Regler den Strom nicht mehr beeinflussen - die Statorspannung bleibt konstant. Das zeigt sich sehr eindrücklich beim
Aufschalten der Last nach 0.8 s
Der Statorfluss in der Maschine verläuft beim Hochlauf etwa proportional zur Statorspannung.
251 D Musterlösungen
D.13 SM geregelt auf (fast) minimalen Statorstrom
a)Bestimmen Sie die Polradspannung UP bei Nennleistung (stationärer Betrieb pro Phase und dann auf Zeiger umrechnen).
P = 3U P I
P
50kW
U P = ----- = ----------------- = 208V
3I 3 80 A
Die Länge des Spannungszeigers ist um 2 grösser, d.h. 294 V.
b)Bestimmen Sie die Statorspannung uS als Phasenspannung und als Zeiger.
U d = – S L q I = 118V ; U q = R S I + U qP = 214V
Die geometrische Addition ergibt schliesslich die Statorspannung:
US =
2
2
U d + U q = 244V und die Zeigerlänge: u S =
2U S = 346V
c)Bestimmen Sie die Stator-Wirk- und Blindleistung PS und QS.
2
2
P S = P me + 3R S I q = 50kW + 3 75m 80 A = 51.4kW und
2
2
Q S = 3I q L q = 3 80 A 1.48 = 28.3kVAr
d) cos im Vergleich zu einer einfachen Spannungsspeisung am 400V Netz:
cos = P S bei Netzspeisung cos = 51.4kW 400V 80 A 3 = 0.928
bei geregelter Stromführung: cos = 51.4kW 3 244V 80 A = 0.878
Grund für den schlechteren cosan den Klemmen ist, dass die gesamte Blindleistung
von Aussen geliefert werden muss.
D.14 Elektronisch kommutierte Maschine
a) Den Phasenstrom i:
P = 2ei i = P 2e = 1kW 200V = 5 A
b) die Phasenspannung u:
U = e + Ri = 105V
c) Spannungsabfall in einem und Verluste in allen Widerständen:
D.14 Elektronisch kommutierte Maschine 252
U R = 5 A1 = 5V
P R = 2 5 A5V = 50W
d) die Klemmenspannung uUV:
U UV = 2 100V + 2 5V = 210V
e) Die Modulationsgrade MU und MV, sowie den Zwischenkreisstrom id:
U U 0 = M U 150V
d
M U = 0.7 = – M V
= M U i U + M V i V 2 = 0.7 5 A = 3.5 A