Elementargeometrie
Werbung

Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
Elementargeometrie
Skript zur gleichnamigen Vorlesung im WS 2008/2009
Vorlesung 2/3: Typen von Bewegungen
Michael Gieding
www.ph-heidelberg.de/wp/gieding
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
1. Das Anliegen der Vorlesung
In Vorlesung 1 wurde zunächst der Begriff der Bewegung allgemein als abstandserhaltende Abbildung der
Ebene auf sich definiert. Ein derartiges abstraktes Vorgehen wäre in der Schule undenkbar, weshalb der
Bewegungsbegriff durch die speziellen Bewegungen Geradenspiegelung, Drehung und Verschiebung
illustriert wurde. Diese Typen von Bewegungen werden mehr oder weniger intensiv in der Schule
behandelt. Häufig findet man dann die Idee der Bewegung in Schullehrbüchern in der folgenden Fassung
des Bewegungsbegriffs:
Unter Bewegungen versteht man Verschiebungen, Drehungen, Geradenspiegelungen oder die
Nacheinanderausführung der genannten Bewegungen.
Im Folgenden soll überprüft werden, ob diese schulische Fassung des Bewegungsbegriffs einer sauberen
mathematischen Untersuchung standhält.
Anders ausgedrückt: Nach den Übungsaufgaben der ersten Serie wissen wir definitiv, dass
Geradenspiegelungen, Verschiebungen und Drehungen Bewegungen sind. Ebenso ist unmittelbar
einsichtig, dass die Nacheinanderausführung von zwei Bewegungen ebenso eine Bewegung ist.
Hinsichtlich einer mathematisch sauberen Untersuchung des schulischen Bewegungsbegriffs müssen wir
uns allerdings die Frage stellen, ob es neben den Geradenspiegelungen, Drehungen, Verschiebungen und
Nacheinanderausführungen dieser Bewegungen noch weitere abstandserhaltende Abbildungen der Ebene
auf sich geben könnte, die keinem der genannten Bewegungstypen zuzuordnen wären.
Dieser Untersuchung sei diese Vorlesung gewidmet. Diesbezüglich scheint es sinnvoll zu sein, weitere
Eigenschaften von Bewegungen zu untersuchen.
2. Eigenschaften von Bewegungen
2.1.
Unmittelbare Folgerungen aus der Starrheit
Satz 2.1:
Bei einer Bewegung 𝛽 wird
a) jede Gerade auf eine Gerade,
b) jede Strecke auf eine Strecke, deren Endpunkte die Bilder der Endpunkte der
Originalstrecke sind, sowie
c) jede Halbgerade mit einem Anfangspunkt 𝑂 auf eine Halbgerade mit dem Anfangspunkt
𝛽(𝑂) abgebildet.
d) Falls zwei Geraden, Strecken, Halbgeraden oder zwei verschiedene dieser Figuren einen
Punkt 𝑃 gemeinsam haben, so haben die Bildfiguren den Punkt 𝛽(𝑃) gemeinsam.
Satz 2.2:
Bei jeder Bewegung β wird
a) jede Halbebene mit einer Randgeraden 𝑔 auf eine Halbebene mit der Randgeraden β(𝑔)
und
b) jeder Winkel auf einen kongruenten Winkel sowie das Innere eines beliebigen Winkels
auf das Innere des zugehörigen Bildwinkels abgebildet.
Beweise: Übungsaufgabe
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
2.2.
Eindeutige Bestimmung von Bewegungen durch drei Punkte
Satz 2.3:
̅̅̅̅̅̅ und dessen Bild ̅̅̅̅̅̅̅̅̅
Jede Bewegung ist durch ein Dreieck 𝐴𝐵𝐶
𝐴′ 𝐵′ 𝐶 ′ eindeutig bestimmt.
Beweis:
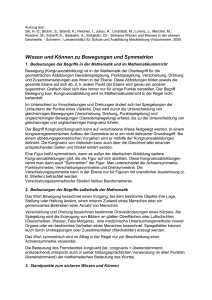
Es sei 𝑃 ein beliebiger von 𝐴, 𝐵 und 𝐶 verschiedener Punkt der Ebene. Ferner sei 𝛽 eine Bewegung, die
das Dreieck ̅̅̅̅̅̅
𝐴𝐵𝐶 auf ̅̅̅̅̅̅̅̅̅
𝐴′ 𝐵′ 𝐶 ′ abbildet. Zu zeigen haben wir jetzt, dass es genau einen Bildpunkt von 𝑃 bei
der Bewegung 𝛽 gibt.
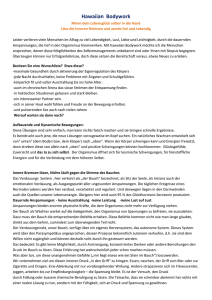
Fall 1: 𝑃 liegt auf 𝐵𝐶:
P'
P
C'
C
A
B
A'
B'
Wir wissen bereits nach Satz 2.1, dass 𝑃′ auf 𝐵′ 𝐶 ′ liegt. Wegen der Abstandserhaltung von 𝛽 gilt: |𝐵𝑃| =
|𝐵′ 𝑃′ | und |𝐶𝑃| = |𝐶 ′ 𝑃′ |. Diese beiden Eigenschaften erfüllt nur ein einziger Punkt auf 𝐵′ 𝐶 ′ . 𝑃′ ist
damit eindeutig bestimmt.
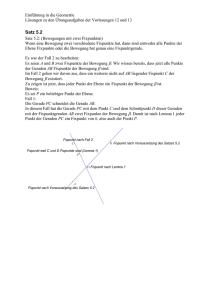
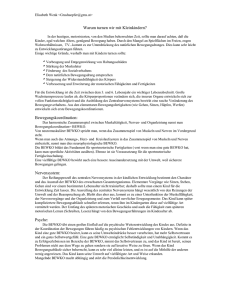
Fall 2: 𝑃 liegt nicht auf 𝐵𝐶:
P'
P
C'
C
A
B
A'
B'
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
Nach Satz 2.2 wird der Winkel ∡𝐶𝐵𝑃 auf einen kongruenten Winkel ∡𝐶 ′ 𝐵′ 𝑃′ abgebildet. Es gibt nun
genau zwei Möglichkeiten ∡𝐶𝐵𝑃 an den Strahl 𝐵′ 𝐶 ′ anzutragen: Einmal liegt 𝑃′ in der Halbebene
𝐵′ 𝐶 ′ , 𝐴′+ und einmal liegt 𝑃′ in der Halbebene 𝐵′ 𝐶 ′ , 𝐴′− . Beides wäre bei 𝛽 nicht möglich. Liegt 𝑃 mit 𝐴
in derselben Halbebene bezüglich 𝐵𝐶, so muss auch 𝑃′ mit 𝐴′ bezüglich 𝐵′𝐶′ in derselben Halbebene
liegen (Satz 2.2). Analoge Überlegungen ergeben sich für den Fall, dass 𝑃 mit 𝐴 nicht in derselben
Halbebene bezüglich 𝐵𝐶 liegt.
Der Rest des Beweises ergibt sich aus der Existenz und Eindeutigkeit des Streckenabtragens und der
Abstandserhaltung von 𝛽.
2.3.
Fixpunktsätze
Definition 2.1: (Fixpunkt einer Bewegung)
Jeder Punkt der bei einer Bewegung auf sich selbst abgebildet wird, heißt Fixpunkt der Bewegung.
Bemerkung: Das Drehzentrum einer Drehung wäre z.B. so ein Fixpunkt.
Definition 2.2: (Fixgerade einer Bewegung)
Eine Gerade, deren sämtliche Punkte Fixpunkte bei einer Bewegung sind, heißt Fixpunktgerade
dieser Bewegung
Satz 2.4:
Sind die beiden Punkte 𝐴 und 𝐵 (𝐴 verschieden von 𝐵) Fixpunkte einer Bewegung 𝛽, so ist 𝐴𝐵
eine Fixgerade bei 𝛽.
Beweis:
Es seien 𝐴 und 𝐵 zwei verschiedene Fixpunkte der Bewegung 𝛽. Wir haben jetzt zu zeigen, dass jeder
Punkt der Geraden 𝐴𝐵 ein Fixpunkt bei 𝛽 ist.
Wir führen den Beweis indirekt und nehmen an, dass es einen Punkt 𝑃 der Geraden 𝐴𝐵 gibt, der kein
Fixpunkt bezüglich 𝛽 ist. Dieser Punkt kann selbstverständlich weder mit 𝐴 noch mit 𝐵 zusammenfallen.
Zunächst ist klar, dass das Bild der Geraden 𝐴𝐵 die Gerade 𝐴𝐵 ist: Nach Satz 2.1 werden Geraden auf
Geraden abgebildet. Da die Punkte 𝐴 und 𝐵 auf sich selbst abgebildet werden und eine Gerade durch
zwei verschiedene Punkte eindeutig bestimmt ist, muss 𝐴𝐵 das Bild von 𝐴𝐵 bei 𝛽 sein.
Hieraus folgt sofort, dass mit 𝑃𝜖𝐴𝐵 auch 𝑃′ auf 𝐴𝐵 liegen muss. Wegen der Abstandserhaltung von 𝛽
muss |𝐴𝑃| = |𝐴𝑃′| und |𝐵𝑃| = |𝐵𝑃′| gelte. Dieses wiederum ist nur für 𝑃 = 𝑃′ möglich. Die Annahme
𝑃 ≠ 𝑃′ ist damit zu verwerfen.
Satz 2.5:
Hat eine Bewegung 𝛽 drei nichtkollineare Fixpunkte 𝐴, 𝐵 und 𝐶, so ist 𝛽 die Identität.
Beweis: Übungsaufgabe
Definition 2.3: (Fixgerade)
Wird eine Gerade bei einer Bewegung auf sich selbst abgebildet, so ist sie eine Fixgerade dieser
Bewegung.
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
Bemerkung:
Fixpunktgeraden sind Fixgeraden. Umgekehrt ist jedoch nicht jede Fixgerade auch eine Fixpunktgerade.
2.4.
Aus den Fixpunkten auf den Typ der Bewegung schließen
Für die Anzahl der Fixpunkte einer Bewegung gibt es prinzipiell die folgenden Möglichkeiten:
1. Fixpunktfreiheit
Fixpunkte einer Bewegung
2. genau ein Fixpunkt
3. zwei Fixpunkte
3.1.
je
3.2.
drei
drei
nichtFixpunkte
kollineare
sind
Fixpunkte
kollinear
Wir werden nun versuchen aus dem Auftreten der Fixpunkte auf den Typ der Bewegung zu schließen.
Wir beginnen mit dem Fall, dass die eine Bewegung genau einen Fixpunkt hat. Aus Vorlesung 1 ist uns
bekannt, dass es sich in diesem Fall um Drehungen handeln könnte. Die Frage lautet: Ist jede Bewegung
mit genau einem Fixpunkt eine Drehung.
Satz 2.6:
Eine Bewegung ist genau dann eine Drehung verschieden von der Identität, wenn sie genau einen
Fixpunkt besitzt.
Beweis:
Es sind zwei Beweise zu führen:
(→) Wenn eine Bewegung eine Drehung verschieden von der Identität ist, dann besitzt sie genau einen
Fixpunkt.
(←) Wenn eine Bewegung genau einen Fixpunkt besitzt, so ist sie eine Drehung.
Wir beweisen zunächst (→)
Gegeben sei eine Drehung 𝑑𝑍,𝛼 . Nach Definition wird 𝑍 auf sich selbst abgebildet und ist damit ein
Fixpunkt de Drehung 𝑑𝑍,𝛼 .
Wir nehmen jetzt an, dass 𝑑𝑍,𝛼 einen weiteren von 𝑍 verschiedenen Fixpunkt 𝐹 hat. Mit den beiden
nichtidentischen Fixpunkten 𝑍 und 𝐹 würde 𝑑𝑍,𝛼 nach Satz 2.4 die Fixpunktgerade 𝑍𝐹 besitzen.
Weiter: Übungsaufgabe.
Jetzt beweisen wir (←).
Es sei 𝛽 eine Bewegung mit dem Fixpunkt 𝑍. Wir haben zu zeigen, dass 𝛽 eine Drehung ist.
Mit 𝑍 gibt es zunächst einen Punkt der bei 𝛽 auf sich selbst abgebildet wird.
Wenn wir zeigen können, dass für zwei beliebige Punkte 𝑃 und 𝑄 |∡𝑃𝑍𝑃′| = |∡𝑄𝑍𝑄′| gilt, sind wir
fertig. Der Winkel ∡𝑃𝑍𝑃′ wäre der gesuchte Drehwinkel.
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
Weiter: Übungsaufgabe.
Nach dem Beweis von Satz 2.6 könnten wir den Begriff der Drehung auch wie folgt definieren:
Eine Bewegung, die entweder die Identität ist oder genau einen Fixpunkt besitzt, ist eine Drehung.
Satz 2.7:
Eine Bewegung ist genau dann eine Geradenspiegelung, wenn sie genau eine Fixpunktgerade
besitzt.
Fixpunkt besitzt.
Beweis:
Es sind wiederum zwei Beweise zu führen:
(→) Wenn eine Bewegung eine Geradenspiegelung ist, so hat sie genau eine Fixpunktgerade.
(←) Wenn eine Bewegung genau eine Fixpunktgerade besitzt, so ist sie eine Geradenspiegelung
Beweis: Übungsaufgabe.
Nach dem Beweis der beiden Sätze 2.6 und 2.7 können wir unsere zu Anfang des Abschnitts betrachtete
Tabelle wie folgt ergänzen:
1. Fixpunktfreiheit
Verschiebung?
Fixpunkte einer Bewegung
2. genau ein Fixpunkt
Drehung
3. zwei Fixpunkte
3.1.
je drei
3.2.
drei
Fixpunkte sind
nichtkollinear
kollineare
Fixpunkte
Geradenspiegelung Identität
Die Tabelle beinhaltet bei der Fixpunktfreiheit eine Frage: Ist jede fixpunktfreie Bewegung eine
Verschiebung?
Da die Bearbeitung der anderen Fälle relativ „glatt“ lief, ist man schnell geneigt, obige Frage mit ja zu
beantworten. Aber Vorsicht, es wird eine kleine Überraschung auf uns warten ….
Zur Beantwortung der Frage, ob jede fixpunktfreie Bewegung eine Verschiebung ist, werden wir die
Methodik der Untersuchung ändern.
2.5.
Der Reduktionssatz
Satz 2.8:
Jede Bewegung ist die Nacheinanderausführung von zwei oder drei Geradenspiegelungen.
Beweis:
Wir wissen bereits, dass jede Bewegung 𝛽 durch die Angabe eines Dreiecks und dessen Bildes eindeutig
bestimmt ist. Gegeben sei also ein Dreieck ̅̅̅̅̅̅
𝐴𝐵𝐶 und sein Bild ̅̅̅̅̅̅̅̅
𝐴′𝐵′𝐶′ bei 𝛽.
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
C
A
C'
B
A'
B'
̅̅̅̅̅
Wir wissen bereits, dass die Mittelsenkrechte 𝑚𝐴𝐴′
̅̅̅̅̅ der Strecke 𝐴𝐴′ existiert. Bei einer Spiegelung an dieser
Mittelsenkrechten wird 𝐴 auf 𝐴′ abgebildet:
C
A
C'
B
A'
mAA'
B'
Fall 1: ̅̅̅̅̅̅̅̅
𝐴′𝐵′𝐶′ liegt so, dass es das Bild von ̅̅̅̅̅̅
𝐴𝐵𝐶 bei der Spiegelung an 𝑚𝐴𝐴′
̅̅̅̅̅ ist:
C
C
C'
C'
A
A
B B'
mAA'
A'
B B'
A'
mAA'
̅̅̅̅̅̅̅̅
In diesem Fall würde ̅̅̅̅̅̅
𝐴𝐵𝐶 durch die Spieglung an 𝑚𝐴𝐴′
̅̅̅̅̅ auf 𝐴′𝐵′𝐶′ abgebildet werden.
Eine dreimalige Nacheinanderausführung dieser Spiegelung hätte dasselbe Ergebnis.
In der Regel wird es nicht so sein, dass die Spiegelung an 𝑚̅̅̅̅̅
𝐴𝐴′ auch die Punkte 𝐵 und 𝐶 jeweils auf die
Punkte 𝐵′ und 𝐶′ abbilden wird.
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
Fall 2: Einer der beiden Punkte 𝐵 und 𝐶 wird durch die Spiegelung an 𝑚𝐴𝐴′
̅̅̅̅̅ auf sein Bild bei 𝛽 abgebildet:
C
C'*
A
B B'
A'
mAA'
C'
Sei dieses o.B.d.A. der Punkt 𝐵. Der Punkt B wir in diesem Fall nicht auf sein Bild 𝐶′ bei 𝛽 abgebildet,
sondern auf einen von 𝐶′ verschiedenen Punkt 𝐶′∗. Jetzt wird durch die Spiegelung an der
̅̅̅̅̅
Mittelsenkrechten 𝑚̅̅̅̅̅̅̅
𝐶′∗ 𝐶′ der Strecke 𝐶𝐶′ der Punkt 𝐶 auf sein Bild 𝐶′ bei 𝛽 abgebildet:
C
C'*
A
mC'[*]C'
B B'
A'
mAA'
C'
Wegen |𝐶′∗ 𝐴′| = |𝐶′𝐴′| und |𝐶′∗ 𝐵′| = |𝐶′𝐵′| sind auch die Punkte 𝐴′ und 𝐵′ Punkte der
Mittelsenkrechten 𝑚̅̅̅̅̅̅̅
𝐶′∗ 𝐶′ und werden deshalb bei einer Spiegelung an dieser auf sich selbst abgebildet.
Fazit: Durch die Nacheinanderausführung zweier Geradenspiegelungen wird ̅̅̅̅̅̅
𝐴𝐵𝐶 auf ̅̅̅̅̅̅̅̅
𝐴′𝐵′𝐶′ abgebildet.
Fall 3: Keiner der Punkte 𝐵 und 𝐶 wird durch die Spiegelung an 𝑚𝐴𝐴′
̅̅̅̅̅ auf sein Bild bei der Bewegung 𝛽
abgebildet.
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
C
C'*
A
C'
B B'
*
A'
mAA'
B'
𝐵 möge bei der Spiegelung an 𝑚𝐴𝐴′
̅̅̅̅̅ auf 𝐵′∗ abgebildet werden. 𝐶′∗ sei das Bild von 𝐶 bei dieser
Spiegelung.
̅̅̅̅̅̅̅
Wir betrachten jetzt die Spiegelung an der Mittelsenkrechten der Strecke 𝐶′
∗ 𝐶′:
C
mC'C'*
C'*
A
C'
B B'
*
A'
mAA'
B'
Weil der Punkt 𝐴 sowohl zu 𝐶′ als auch zu 𝐶′∗ ein und denselben Abstand hat, ist er ein Punkt der
̅̅̅̅̅̅̅
Mittelsenkrechten der Strecke 𝐶′
∗ 𝐶′. Dementsprechend wird er bei einer Spiegelung an dieser
Mittelsenkrechten auf sich selbst abgebildet. Der Punkt 𝐶′∗wird bei dieser Spiegelung auf den Punkt 𝐶′
abgebildet.
Fall 3.1: Auch der Punkt 𝐵′∗ wird bei der Spiegelung an der Mittelsenkrechten von ̅̅̅̅̅̅̅
𝐶′∗ 𝐶′ auf den Punkt B‘
̅̅̅̅̅̅
abgebildet: Das Dreieck 𝐴𝐵𝐶 wird durch die Nacheinanderausführung zweier Geradenspiegelungen auf
das Dreieck ̅̅̅̅̅̅̅̅
𝐴′𝐵′𝐶′ abgebildet.
Fall 3.2: Der Punkt 𝐵′∗ wird bei der Spiegelung an der Mittelsenkrechten von ̅̅̅̅̅̅̅
𝐶′∗ 𝐶′ nicht auf den Punkt B‘
abgebildet:
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
C
B'
mC'C'*
C'*
A
C'
B B'
*
A'
mAA'
B''*
̅̅̅̅̅̅̅
𝐵′′∗ sei das Bild von 𝐵′∗ bei der Spiegelung an der Mittelsenkrechten der Strecke 𝐶′
∗ 𝐶′.
Zunächst kann festgestellt werden, dass 𝐵′ und 𝐵′′∗ auf verschiedenen Seiten bezüglich der Geraden 𝐴′𝐵′
̅̅̅̅̅̅ wird durch die
liegen müssen. Eine Spiegelung an 𝐴′𝐵′ bildet jetzt 𝐵′′∗ auf 𝐵′ ab. Fazit: Das Dreieck 𝐴𝐵𝐶
Nacheinanderausführung dreier Geradenspiegelungen auf das Dreieck ̅̅̅̅̅̅̅̅
𝐴′𝐵′𝐶′ abgebildet.
Mehr Fälle können nicht auftreten.
2.6.
Klassifizierung der fixpunktfreien Bewegungen
Der Reduktionssatz stellt uns jetzt ein Werkzeug zur Klassifizierung der fixpunktfreien Bewegungen zur
Verfügung. Wir müssen nur untersuchen, welche fixpunktfreien Bewegungen sich durch die
Nacheinanderausführung von zwei bzw. drei Geradenspiegelungen ergeben können.
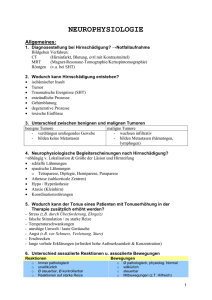
Fall 1: fixpunktfreie Nacheinanderausführungen zweier Geradenspiegelungen
Es seien 𝑠𝑔 und 𝑠ℎ zwei Geradenspiegelungen. Wir wissen, dass die Spiegelgeraden 𝑔 und ℎ
Fixpunktgeraden sind, d.h. jeder Punkt der Spiegelgeraden wird auf sich selbst abgebildet. Das bedeutet,
dass die Nacheinanderausführung zweier Geradenspiegelungen, deren Spiegelachsen irgendwelche Punkte
gemeinsam haben, nicht fixpunktfrei sein kann.
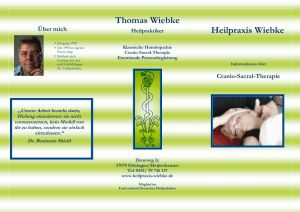
Wir betrachten also die Nacheinanderausführung 𝑠ℎ °𝑠𝑔 mit ℎ ∥ 𝑔 ∧ ℎ ≠ 𝑔.
C
C'
C''
A
A''
A'
B'
B
g
B''
h
Entsprechend der obigen Skizze liegt die Vermutung nahe, dass die Nacheinanderausführung 𝑠ℎ °𝑠𝑔 eine
Verschiebung ergibt. Um dieses auch zu beweisen, zeigen wir zuvor den folgenden Satz:
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
Satz 2.9:
Eine Bewegung verschieden von der Identität ist genau dann eine Verschiebung, wenn sie
fixpunktfrei ist und jede Gerade auf eine zu ihr parallele Gerade abbildet.
Beweis:
(→)
Es sei 𝑣⃗⃗⃗⃗⃗
𝑃𝑂 eine Verschiebung verschieden von der Identität. Wir haben zu zeigen dass, 𝑣⃗⃗⃗⃗⃗
𝑃𝑂 keinen
Fixpunkt besitzt und jede Gerade auf eine zu ihr parallele Gerade abbildet.
Würde 𝑣⃗⃗⃗⃗⃗
𝑃𝑂 jede Gerade auf eine zu ihr parallele Gerade abbilden, könnte sie auch keinen Fixpunkt haben.
Es genügt also zu zeigen, dass 𝑣⃗⃗⃗⃗⃗
𝑃𝑂 Geraden auf parallele Geraden abbildet:
B
B'
A'
A
Es 𝐴𝐵 eine Gerade. Es gilt: 𝐴′ = 𝐴 + ⃗⃗⃗⃗⃗
𝑃𝑂 =𝐵 + ⃗⃗⃗⃗⃗
𝑃𝑂. Damit gilt: 𝐴𝐴′ ∥ 𝐵𝐵′ , ̅̅̅̅̅
𝐴𝐴′ ≅ ̅̅̅̅̅
𝐵𝐵′. Das Viereck
̅̅̅̅̅̅̅̅̅̅
𝐴𝐴′𝐵′𝐵 ist somit ein Parallelogramm.
(←)
Es sei 𝛽 eine fixpunktfreie Bewegung, die jede Gerade auf eine zu ihr parallele Gerade abbildet.
Weil 𝛽 keine Fixpunkte hat, kann 𝛽 nicht die Identität sein.
Es sei nun 𝐴𝐵 eine beliebige Gerade, die durch 𝛽 auf die Gerade 𝐴′𝐵′ abgebildet wird. Wegen 𝐴𝐵 ∥ 𝐴′𝐵′
̅̅̅̅ ≅ ̅̅̅̅̅̅
und 𝐴𝐵
𝐴′𝐵′ ist ̅̅̅̅̅̅̅̅̅̅
𝐴𝐴′𝐵′𝐵 ein Parallelogramm … .
Aus Satz 2.9 folgt sofort:
Satz 2.10:
Die Nacheinanderausführung 𝑠ℎ °𝑠𝑔 mit ℎ ∥ 𝑔 ∧ ℎ ≠ 𝑔 ist eine Verschiebung.
Beweis:
Wir brauchen nur zu zeigen, dass 𝑠ℎ °𝑠𝑔 fixpunktfrei ist und eine beliebige Gerade auf eine zu ihr parallele
Gerade abbildet. (Übungsaufgabe)
Es liegt die Frage nahe, ob Jede Verschiebung auch durch die Nacheinanderausführung zweier
Geradenspiegelungen dargestellt werden kann.
Satz 2.11:
Zu jeder Verschiebung 𝑣𝑃𝑂
⃗⃗⃗⃗⃗ existieren Geradenspiegelungen 𝑠𝑏 , 𝑠𝑎 mit 𝑣𝑃𝑂
⃗⃗⃗⃗⃗ = 𝑠𝑏 ° 𝑠𝑎 .
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
Beweis: Übungsaufgabe.
Fall 2: fixpunktfreie Nacheinanderausführung dreier Geradenspiegelungen
Zunächst lässt sich konstatieren, dass die Spiegelachsen der drei nacheinander auszuführenden
Spiegelungen sich nicht in genau einem Punkt treffen dürfen. In diesem Fall wäre dieser Punkt nämlich
ein Fixpunkt bei der Nacheinanderausführung der drei Geradenspiegelungen.
Möglich wäre etwa die folgende Konstellation:
C
g
A
i
h
B
Zunächst können wir nicht absolut sicher sein, dass die Nacheinanderausführung 𝑠𝑖 °𝑠ℎ °𝑠𝑔 keinen
Fixpunkt hat. Obschon kein Punkt einer der dreiSpiegelgeraden 𝑔, ℎ, 𝑖 auf sich selbst durch 𝑠𝑖 °𝑠ℎ °𝑠𝑔 auf
sich selbst abgebildet wird, könnte es vielleicht einen Punkt geben, der zwar bezüglich der einzelnen
Geradenspiegelungen kein Fixpunkt ist, durch die Nacheinanderausführung der drei Bewegungen jedoch
im Endeffekt auf sich selbst abgebildet wird.
Derartige Überlegungen mögen zunächst keine Rolle spielen. Unser weiteres Vorgehen wird später
rechtfertigen, das es einen derartigen Punkt nicht geben kann.
Wir gehen im Folgenden also davon aus, dass unsere Spiegelgeraden 𝑔, ℎ, 𝑖 entsprechend obiger Skizze die
Punkte 𝐴, 𝐵 und 𝐶 paarweise gemeinsam haben: 𝑔 ∩ ℎ = {𝐴}, ℎ ∩ 𝑖 = {𝐵}, 𝑖 ∩ 𝑔 = {𝐶}, 𝐴, 𝐵, 𝐶
paarweise verschieden.
Je zwei der Spiegelachsen, die bezüglich unserer Nacheinanderausführung 𝑠𝑖 °𝑠ℎ °𝑠𝑔 relevant sind, haben
also genau einen Punkt gemeinsam.
Die Nacheinanderausführung von Abbildungen ist assoziativ. Im speziellen Fall 𝑠𝑖 °𝑠ℎ °𝑠𝑔 gilt also:
𝑠𝑖 °(𝑠ℎ °𝑠𝑔 ) = (𝑠𝑖 °𝑠ℎ )°𝑠𝑔 .
Es liegt nahe, dass komplexe Problem der Nacheinanderausführung dreier Geradenspiegelungen mit sich
schneidenden Spiegelachsen auf das einfachere Problem einer Untersuchung der Nacheinanderausführung
zweier Geradenspiegelungen zu reduzieren, deren Spiegelachsen sich in genau einem Punkt schneiden.
Untersuchung der Nacheinanderausführung zweier Geradenspiegelungen mit sich in genau einem Punkt
schneidenden Spiegelgeraden:
Wir betrachten also das Produkt 𝑠ℎ °𝑠𝑔 zweier Geradenspiegelungen. Der gemeinsame Schnittpunkt der
Spiegelachsen 𝑔 und ℎ sei der Punkt 𝐴.
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
A
g
h
Unmittelbar einsichtig ist, dass 𝐴 ein Fixpunkt der Bewegung 𝑠ℎ °𝑠𝑔 ist.
Es sei nun 𝐵 ein von 𝐴 verschiedener Punkt:
h
B''
B
g
A
L1
L2
B'
Wegen der Abstandserhaltung der beiden Spiegelungen 𝑠ℎ und 𝑠𝑔 liegen die Punkte 𝐵, 𝐵′ und 𝐵′′ auf ein
und demselben Kreis um 𝐴.
Wegen der Winkeltreue von Bewegungen gilt (Bezeichnungen entsprechend obiger Skizze):
(1) |∡𝐵𝐴𝐿1 | = |∡𝐵′𝐴𝐿1 |
(2) |∡𝐵′𝐴𝐿2 | = |∡𝐵′′𝐴𝐿2 |
Entsprechend der obigen Skizze gilt
(3) ∡(𝑔, ℎ) = ∡𝐿1 𝐴𝐵′ + ∡𝐵𝐴𝐿2
Aus (1), (2) und (3) folgt:
(4) ∡𝐵𝐴𝐵′′ = 2∡(𝑔, ℎ)
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
Der Zusammenhang (4) ergibt sich auch für andere Lagen von B bezüglich der Spiegelgeraden 𝑔 und ℎ
(Man überzeuge sich davon, Übungsaufgabe!).
Die vorangegangenen Überlegungen erlauben die Formulierung des folgenden Satzes:
Satz 2.12:
Die Nacheinanderausführung zweier Geradenspiegelungen 𝑠𝑔 und 𝑠ℎ , deren Spiegelachsen genau
den Punkt 𝐴 gemeinsam haben, ist eine Drehung mit dem Drehzentrum 𝐴 und dem Drehwinkel
2∡(𝑔, ℎ).
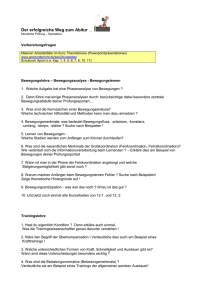
Die Überlegungen, die zu Satz 2.12. führten, setzen nur voraus, dass die beiden Spiegelgeraden 𝑔 und ℎ
genau den Punkt A gemeinsam hatten. Natürlich war durch die spezielle Wahl der Spiegelgeraden dann
der Winkel ∡(𝑔, ℎ) eindeutig bestimmt. Der Beweis selbst hätte genauso gut mittels zweier anderer
Spiegelachsen geführt werden können, die den Punkt A gemeinsam haben. Vorausgesetzt, dass die beiden
anderen Geraden ebenso einen Winkel der Größe des Winkels ∡(𝑔, ℎ) einschließen, hätten wir denselben
Drehwinkel 2∡(𝑔, ℎ) erhalten, also insgesamt dieselbe Drehung wie bei der Nacheinanderausführung
𝑠ℎ °𝑠𝑔 .
Die folgenden Bilder illustrieren diesen Umstand:
P'
mBAC = 52,00
mQAQ'' = 104,00
R'
Q'
h
C
A
R
B
g
Q
Q''
P
P''
R''
mBAC = 52,00
mQAQ'' = 104,00
h
Bg
C
A
R
Q
Q''
Q'
P'
P
R'
R''
P''
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
mBAC = 52,00
mQAQ'' = 104,00
R'
gB
Q'
h
R
C
P'
A
Q
Q''
P
P''
R''
Bemerkung:
In der Regel ist es nicht egal, ob zuerst an 𝑔 und dann an ℎ gespiegelt wird oder umgekehrt. Nur in dem
Fall, da g und h senkrecht aufeinander stehen gilt 𝑠ℎ °𝑠𝑔 = 𝑠𝑔 °𝑠ℎ (Übungsaufgabe 5, Serie 3).
Unsere bisherigen Überlegungen beweisen diese Tatsache, denn wir wissen jetzt, dass 𝑠ℎ °𝑠𝑔 = 𝑠ℎ′ °𝑠𝑔′ gilt,
wenn der Schnittpunkt von 𝑔 mit ℎ derselbe wie der von 𝑔′ mit ℎ′ ist und beide Geradenpaare einen
Winkel derselben Größe einschließen. Wenn nun die beiden Geraden 𝑔 und ℎ senkrecht aufeinander
stehen, dann gilt: 𝑔 ∩ ℎ = ℎ ∩ 𝑔 = {𝑃}, |∡(𝑔, ℎ)| = |∡(ℎ, 𝑔)|. Fazit: 𝑠ℎ °𝑠𝑔 = 𝑠𝑔 °𝑠ℎ .
Satz 2.13:
Zwei Geraden 𝑔 und ℎ stehen genau dann senkrecht aufeinander, wenn 𝑠ℎ °𝑠𝑔 = 𝑠𝑔 °𝑠ℎ .und 𝑔 ≢
ℎ.
Bemerkungen. Die obigen Herleitungen beweisen Satz 2.13 natürlich noch nicht vollständig (s. Beweis
Übungsaufgabe 5 der Serie 3).
Nach diesen Überlegungen zur Nacheinanderausführung zweier Geradenspiegelungen, deren
Spiegelachsen genau einen Punkt gemeinsam haben, wenden wir uns wieder dem eigentlichen Problem,
der Nacheinanderausführung dreier Geradenspiegelungen zu.
Zur Erinnerung: 𝑔 ∩ ℎ = {𝐴}, ℎ ∩ 𝑖 = {𝐵}, 𝑖 ∩ 𝑔 = {𝐶}, 𝐴, 𝐵, 𝐶 paarweise verschieden.
Wir betrachten 𝑠𝑖 °𝑠ℎ °𝑠𝑔 bzw. genauer 𝑠𝑖 °(𝑠ℎ °𝑠𝑔 ).
C
g
A
i
h
B
Wir fällen zunächst das Lot ℎ′ von 𝐴 auf die Gerade 𝑖. Der Fußpunkt dieses Lotes sei 𝐷.
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
C
g
D
A
h'
i
h
B
An den Strahl 𝐴𝐷 + wird ein Winkel der Größe von ∡(𝑔, ℎ) angetragen, die durch den angetragenen
Winkel eindeutig bestimmte Gerade nennen wir 𝑔′.
C
g'
g
D
A
h'
i
h
B
Nach den Überlegungen zur Nacheinanderausführung zweier Geradenspiegelungen, deren Spiegelachsen
genau einen Punkt gemeinsam haben gilt nun:
𝑠𝑖 °(𝑠ℎ °𝑠𝑔 )=𝑠𝑖 °(𝑠ℎ′ °𝑠𝑔′ )
Wegen der Assoziativität der Nacheinanderausführung von Abbildungen gilt ferner:
𝑠𝑖 °(𝑠ℎ °𝑠𝑔 )=𝑠𝑖 °(𝑠ℎ′ °𝑠𝑔′ ) = (𝑠𝑖 °𝑠ℎ′ )°𝑠𝑔′
Die Drehung 𝑠𝑖 °𝑠ℎ′ können wir durch die Drehung 𝑠𝑖′ °𝑠ℎ′′ mit 𝑖 ′ ∩ ℎ′′ = {𝐷}, 𝑖′ ⊥ ℎ′′ ersetzen. ℎ′′
wählen wir dabei derart, dass ℎ′′ ⊥ 𝑔′ gilt. Der Schnittpunkt von ℎ′′ mit 𝑔′ sei mit 𝐸 bezeichnet.
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen
C
g'
g
D
h'
h''
A
E
i
i'
h
B
Fazit: 𝑠𝑖 °𝑠ℎ °𝑠𝑔 = 𝑠𝑖′ °𝑠ℎ′′ °𝑠𝑔′ mit 𝑖 ′ ⊥ ℎ′′ , ℎ′′ ⊥ 𝑔′ und damit 𝑖′ ∥ 𝑔′.
g'
D
h''
i'
E
Wegen der Orthogonalitäten und der daraus resultierenden Kommutativität der Nacheinanderausführung
zweier Geradenspiegelungen zuzüglich der Assoziativität der Nacheinanderausführung von Abbildungen
gilt:
𝑠𝑖′ °𝑠ℎ′′ °𝑠𝑔′ = (𝑠𝑖′ °𝑠𝑔′ )°𝑠ℎ′′
⃗⃗⃗⃗⃗ . Damit ist
Wegen der Parallelität 𝑖′ ∥ 𝑔′ ist 𝑠𝑖′ °𝑠𝑔′ eine Verschiebung mit dem Verschiebungsvektor 2𝐸𝐷
(𝑠𝑖′ °𝑠𝑔′ )°𝑠ℎ′′ die Nacheinanderausführung einer Verschiebung und einer Geradenspiegelung:
(𝑠𝑖′ °𝑠𝑔′ )°𝑠ℎ′′ = 𝑣2𝐸𝐷
⃗⃗⃗⃗⃗⃗ °𝑠𝐸𝐷 .
Leicht zeigt man: 𝑣2𝐸𝐷
⃗⃗⃗⃗⃗⃗ °𝑠𝐸𝐷 = 𝑠𝐸𝐷 °𝑣2𝐸𝐷
⃗⃗⃗⃗⃗⃗ (Übungsaufgabe)
Die Nacheinanderausführung einer Verschiebung mit einer Geradenspiegelung nennt man
Schubspiegelung:
Definition 2.4: (Schubspiegelung)
Die Nacheinanderausführung einer Verschiebung mit einer Geradenspiegelung, die derart
beschaffen sind, dass der Verschiebungsvektor parallel zur Spiegelachse ist, heißt
Schubspiegelung.
Kapitel 1: Kongruenzabbildungen, Vorlesung 2/3: Typen von Bewegungen