CV7_Formextraktion
Werbung

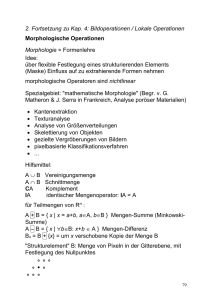
Form: Morphologische Operatoren
Informationsgewinnung
● Binarisierte Bilder enthalten oft
zusätzliche Strukturen oder
nicht markierte Punkte
Korrektur durch morphologische Operatoren
Quelle: Jähne B. Digitale Bildverarbeitung
Computer Vision
1_Seite 1
Form: Erosion und Dilatation
Informationsgewinnung
● Morphologische Operatoren sind lokale Operatoren, die innerhalb bestimmter
Nachbarschaften (Fenster, strukturierendes Element) angewandt werden.
● Erosion - logische UND-Verknüpfung (bzgl. 255): Ein Bildpunkt wird auf 0 gesetzt, wenn
innerhalb des strukturierenden Elements eine 0 vorhanden ist, sonst auf 255.
● Dilatation – logische ODER-Verknüpfung (bzgl. 255): Ein Bildpunkt wird auf 255 gesetzt,
wenn innerhalb des strukturierenden Elements eine 255 enthalten ist, sonst 0.
Computer Vision
1_Seite 2
Form: Opening und Closing
Informationsgewinnung
● Durch Kombination der Erosion und Dilatation lassen sich morphologische Operatoren
zusammensetzen.
● Opening: Erst Erosion dann Dilatation
Erosion
Dilatation
● Closing: Erst Dilation dann Erosion
Dilatation
Computer Vision
Erosion
1_Seite 3
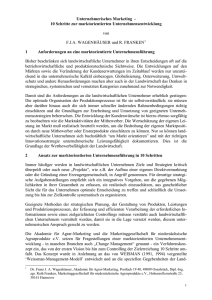
Form: morphologische Operatoren
● Beispiel: strukturgebendes Element
zusätzliche
Strukturen
0
1
1
1
0
1
1
1
1
1
1
1
1
1
1
Informationsgewinnung
1
1
1
1
1
0
1
1
1
0
Erosion
Opening
Dilatation
Closing
Nicht markierte
Punkte
Computer Vision
1_Seite 4
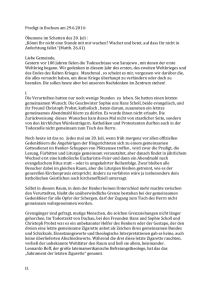
Form: Extraktion von Rändern
Informationsgewinnung
● Idee: Randpixel haben zumindest an einer Seite keinen Nachbarn
● Ein Erosionsoperator mit einer Maske, die alle möglichen Nachbarn enthält, entfernt alle
Randpunkte
1 1 1
1 1 1
1 1 1
● Die Mengendifferenz zwischen dem Original und dem erodierten Bild liefert die Randpunkte:
g‘: Erosion 3x3
g = 255 und g‘ = 0
g: Original
Computer Vision
1_Seite 5
Form: Darstellung von Objektberandungen
Informationsgewinnung
Kettencode (8er-Nachbarschaft):
1
0
0
6
7
1
● Erstellung: Folge der Richtungen entlang der Kontur
ab beliebigem Startpunkt.
Beispiel: 22110067665654323
2
● Der Kettencode ist translationsinvariant.
2
● Kompakte Darstellung (gegenüber
Matrixdarstellung des umgebenden Rechtecks)
umgebendes Rechteck: R² bit
Kettencode: ~ R Randpunkte * 3 bit
Ab einem Durchmesser von 10
Bildpunkten ist der Kettencode kompakter.
3
2
4
5
1
0
6
7
Computer Vision
1_Seite 6
Form: Darstellung von Objektberandungen
Informationsgewinnung
Kettencode (8er-Nachbarschaft):
1
0
0
6
7
1
● Erstellung: Folge der Richtungen entlang der Kontur
ab beliebigem Startpunkt.
Beispiel: 22110067665654323
2
● Der Kettencode ist translationsinvariant.
2
● Kompakte Darstellung (gegenüber
Matrixdarstellung des umgebenden Rechtecks)
umgebendes Rechteck: R² bit
Kettencode: ~ R Randpunkte * 3 bit
Ab einem Durchmesser von 10
Bildpunkten ist der Kettencode kompakter.
3
2
4
5
1
0
6
7
Computer Vision
1_Seite 7
Form: Darstellung von Objektberandungen
Informationsgewinnung
Weitere Prozessierung:
1
0
0
● Anfangspunktinvarianz - Startpunkt-Normierung:
6
7
1
Verschiebe zirkular so, dass die Sequenz eine Zahl
minimaler Größe bildet.
2
Beispiel: 22110067665654323 00676656543232211
2
● Rotationsinvarianz - Rotationsnormierung: Erste
Differenz: Anzahl der Richtungen, die zwei aufeinander
folgende Elemente des Codes trennen.
Beispiel: 22110067665654323 07070617071777717
● Anfangspunkt und Rotationsinvarianz erhält man wie
3
2
1
2
3
1
1
7
2
4
0
4
6
3
4
5
6
7
5
folgt: Kettencode Rotationsnormierung
Startpunktnormierung
5
6
0
Beispiel: 22110067665654323 07070617071777717
06170717777170707
7
Computer Vision
1_Seite 8
Form: Darstellung von Objektberandungen
Informationsgewinnung
Zusammenfassung Kettencode:
● Translations-, rotations- und startpunktinvariant.
● Kompakte Darstellung gegenüber Matrixdarstellung.
● Nicht skalierungsinvariant.
● Kettencodes unterschiedlicher Länge sind nicht direkt vergleichbar.
● Der Kettencode ist eine Polygondarstellung in Pixelgenauigkeit.
● Gesucht: Polygondarstellung bzw. Polygonapproximation, die die wesentlichen
Berandungseigenschaften mit einer möglichst kleinen Anzahl von Segmenten beschreibt
(ein nicht-triviales Problem iterativer Suche).
Verfahren durch Überdeckung
Computer Vision
1_Seite 9
Form: Darstellung von Objektberandungen
Informationsgewinnung
Polygonapproximation
● Einfache Methode (liefert Polygone mit minimalem Umfang):
1. Überdecke die Randkurve
mit rechtwinklig
angeordneten Quadraten
2. Gerade Verbindungen
der Außenecken der
umrandeten Fläche
Computer Vision
1_Seite 10
Form: Kurven
Informationsgewinnung
Darstellung der Berandung durch Kurven:
p0
r
qk
Schwerpunkt (x0,y0)T
p1 ( x1 , y1 )T
Position als Funktion der Länge:
x0 r cos t
p(t )
y0 r sin t
t [0,2 )
p2
qk (t ) (1 t ) pk t pk 1 t [0,1)
Problem bei Polygondarstellungen: Die Ecken der Polygone sind nicht äquidistant!
Abhilfe: Polardarstellung
Computer Vision
1_Seite 11
Form: Polardarstellung der Obj.-Berandung
Informationsgewinnung
Polardarstellung: Objektbeschreibung mit Hilfe des Objektradius als Funktion des Winkels.
A
q
r
A
r
q
Schwerpunkt
Schwerpunkt
r
r
A/2
A/2
A/2
q
q
/2
3/2
2
/2
3/2
2
● Vorteil: äquidistante Darstellung.
Computer Vision
1_Seite 12
Form: Momente der Objektberandung
1. Umwandlung der Berandung in eine
Kurve (z. B. Polardarstellung)
Informationsgewinnung
2.
Berechnung der Momente der Kurve
K
n ( ) ( i ) n p( i )
i 1
A
r
mit
q
K
i p( i )
i 1
Schwerpunkt
Bei Polardarstellung:
K
n (q ) (q i q ) n g (q i )
r
i 1
A/2
mit
A/2
K
q
/2
3/2
2
Computer Vision
q q i r (q i )
i 1
1_Seite 13
Form: Fourier-Deskriptoren
Informationsgewinnung
Fourierdeskriptoren für diskretisierte Kurven in karthesischen Koordinaten:
● Gegeben: geschlossene, äquidistant diskretisierte Kurve u {x( s ), y ( s )}, s 0,..., L 1
● In komplexer Schreibweise
u ( s) x( s) i y ( s), s 0,..., L 1
● Die diskrete Fouriertransformation (DFT) liefert eine Zerlegung von u in die Summe
2ks
i
1 L 1
u ( s ) a(k ) e L , 0 s L 1
L k 0
mit den Koeffizienten
L 1
a(k ) u ( s ) e
i
2ks
L
, 0 k L 1
s 0
● Die Koeffizienten heißen Fourierdeskriptoren und beschreiben die Objektberandung.
Computer Vision
1_Seite 14
Form: Fourier-Deskriptoren
Informationsgewinnung
Eigenschaften der Fourierdeskriptoren
● Identität (Eindeutigkeit)
u (s )
a(k )
● Translation
u' (s) u(s) u0
a' ( s) a( s) (k )u0
● Skalierung
u ' ( s) u ( s)
a' (k ) a(k )
● Anfangspunkt
● Rotation
u ' ( s) u ( s s0 )
u' ( s) u (s)ei 2q
Computer Vision
a ' ( s ) a ( k )e
i 2s0
L
a' (k ) a(k )ei 2q
1_Seite 15
Form: Fourier-Deskriptoren
Informationsgewinnung
Ähnlichkeit von Randkurven mit Fourierdeskriptoren
Seien u(s) und v(s) zwei mittelwertfreie Randkurven mit Koeffizienten a(k) und b(k) und
L 1
iq 2
d ( s0 ) min u ( s) v( s s0 )e
s0
s 0
mit
c(k ) cos(
k
k
k q )
b( k )
d(s0) kann für jedes s0 berechnet werden.
2
k
c(k ) sin(
tan q
c(k ) cos(
k
k )
k
k )
Das Minimum ist dann ein
Ähnlichkeitsmaß für die Formen.
k
k
c(k ) a (k )b* (k )e ik
2s0 / L
Computer Vision
1_Seite 16
Form: Darstellung von Objektberandungen
1
0
0
6
7
1
3
0
2
1
2
1
2
4
5
Informationsgewinnung
0
6
1
1
Kettencode
8er-Nachbarschaft
7
Kettencode
0 4er-Nachbarschaft
2
3
Computer Vision
1_Seite 17
Form: Darstellung von Objektberandungen
Informationsgewinnung
Frage: Welcher der beiden Ränder wird durch Erosion und Mengendifferenz geliefert?
Erinnerung:
strukturgebendes Element
1 1 1
1 1 1
1 1 1
Computer Vision
1_Seite 18