(+1) = (+1)
Werbung
 = (+1)")
Symmetrielehre - Beispiele
Literatur
- J. E. Huheey, E. A. Kreiter, R.L. Kreiter Anorganische Chemie,
de Gruyter 1995
- F. Engelke Aufbau der Moleküle, Teubner 1996
- R.L. Carter Molecular Symmetry and Group Theory, Wiley 1998
- S.F.A. Kettle Symmetrie und Struktur, Teubner 1994
- D.C. Harris, M.D. Bertolucci Symmetry and Spectroscopy,
Dover 1989
- D.M. Bishop Group Theory and Chemistry, Dover 1973
- F.A. Cotton Chemical Applications of Group Theory,3ed
Wiley 1990
Symmetrielehre - Anwendung & Nutzen!
· IR, UV/VIS-Spektroskopie - Auswahlregeln (Bandenzahl)
· NMR-Spektroskopie - Anzahl Resonanzen
· MO-Theorie - Wechselwirkungsdiagramme
· Kristallographie - Strukturanalyse
(zusätzliche Symmetrieoperation: Translation..)
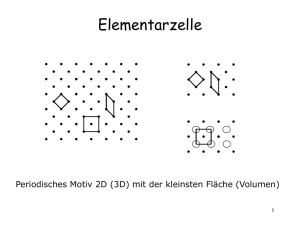
Symmetrielehre
empirisch: Körper zeigen unterschiedliche Symmetrieeigenschaften
180°
Kugel
Würfel
Jede Rotation um Achse bringt Kugel
wieder auf Deckung mit sich selbst
120°
90°
Ausgewählte Symmetrieelemente
des Würfels (Rotationsachsen)
geringere Symmetrie als Kugel
Systematische Behandlung: Gruppentheorie
Symmetrie
Symmetrieoperationen:
Zu jeder Symmetrieoperation gibt es ein zugehöriges Symmetrieelement
zusätzlich noch weitere Symmetrieoperationen
Symmetrieoperation: Identität
Symbol E: "macht gar nichts!"
entspricht Drehung um 360° oder 0°
- notwendig für vollständige Beschreibung innerhalb
der Gruppentheorie
E =neutrales Element
Symmetrieoperation - Rotation
· H2O hat eine zweizählige Achse
C2-Achse 360°/2 = 180°
Atome kommen bei Drehung um 180°
wieder zur Deckung
· NH3 hat eine dreizählige Achse
C3-Achse 360°/3 = 120° (360/n)
Atome kommen bei Drehung um 120° (C3)
und 240° wieder zur Deckung
ebenso: C4, C5, C6 .. Cn-Achsen
Hauptachse: Achse höchster Zähligkeit: z-Achse
Symmetrieoperation - Rotation
C41
C4
-90°
+90°
C34 = C41
C34
+270°
C2 +180°
C24 +180°
m
allgemein: C n
Bezeichnung: C2
Drehung um: m·360°/n
2
z.B. 2·360°/4=180° = C4
Bezeichnung der Drehachsen
z
C4 /C2
2+
OC
OC
C2 ´
Pt
CO
C2´´
CO
C2´´
Hauptdrehachse: C4 z-Achse
C2 ´
Koordinatensystem
- Ursprung Zentralatom z.B. CH4 C-Atom
- Drehachse höchster Zähligkeit z-Achse
tetraedrische Moleküle x,y,z Achsen colinear mit C2-Achsen
z
- planare Moleküle
y
z-Achse ^ auf Molekülebene
F
F
x-Achse beinhaltet größte Atomzahl
Xe
F
F
z
x
wenn z-Achse in Ebene, dann x ^ auf Molekülebene
x
z
- rechtshändiges Koordinatensystem
H
y
x
y
O
H
Spiegelebene
• Wasser 2 Spiegelebenen
• stehen senkrecht aufeinander
v and v‘
• beinhalten Hauptdrehachse
(hier C2-Achse)
Symmetrieelement: Ebene
Symmetrieoperation: Spiegelung
Dihedrale Spiegelebenen
c6-Hauptachse
c2-Achse
c2-Achse
d
c6
(z-Achse)
c2-Achse
d
d
• dihedrale Spiegelebenen d schneiden C2-Achsen
senkrecht zur Hauptachse
Horizontale Spiegelebene
2Cl
Cl
h
Pt
Cl
Cl
h
h
Cl
Cl
2-
Pt
Cl
Cl
dz2-Orbital symmetrisch
-Orbital antisymmetrisch
Inversionszentrum
i
Inversionszentrum i
Oktaeder
i
Ethen
W(CO)6
Symmetrieoperation:Drehspiegelachse
Kombination aus Drehachse und Spiegelung an Ebene ^ auf Drehachse
Bezeichnung: Kombination aus C4-Achse und Spiegelebene
S4-Drehspiegelachse
z.B. Methan hat eine Drehspiegelachse (S4):
C4
C2, S4
X
X
Tetraeder 3 S4-Achsen
M
C2, S4
X
C2, S4
X
Symmetrieoperation:Drehspiegelachse
C4
C
C
C
C
C
C
C
v
Allen
C
C
S4-Achse
NB: S2-Achse: C2 & = i (Inversionszentrum)
y
x
x
z
C2
x,y,z
z
= Inversion
x
z
y
-x,-y,z
y
-x,-y,-z
Definition von Spiegelebenen: h, d, v
C6
S6-Drehspiegelachse
H
H
H 60°
H
H
H
Newman Projektion
Ethan
H
H
H
H
H
H
Symmetrie & Chiralität
Br
I) asymmetrisch = chiral - nur Identität E
F
Cl
I
Me
II) dissymmetrisch = chiral - nur Cn-Achsen
C2
Me
I) & II) identische skalare aber unterschiedliche vektorielle Eigenschaften
z.B. Sdpkt. (skalar)
Wechselwirkung mit polarisiertem Licht (vektoriell)
Me
III) symmetrisch = achiral i, Sn,
Me
identische skalare und vektorielle Eigenschaften
NMR-Spektroskopie
Me
homotope Protonen (Kerne) Cn-Achsen
C2
Me
gleiche chemische Verschiebung unabhängig vom Lösungsmittel
CH3
enantiotope Protonen (Kerne)
CH3
gleiche chemische Verschiebung in achiralem Lösungsmittel
kann in chiralem Lösungsmittel unterschiedlich sein
Me
diastereotope Protonen (Kerne)
keine Symmetrie
chemische Verschiebung kann in a/chiralem Lösungsmittel
unterschiedlich sein (kann zufällig gleich sein)
CH3
CH3
NMR-Spektroskopie
wichtig hierbei: Zunächst auf Homotopie überprüfen!
CH3
CH3
C2
CH3
C2
H
H
CH3
H
H
H
H
H
H
H
homotop! 1 Resonanz!
C2
C2
H
homotop!
H
koppeln nicht!
H
CH3
H
H
H
H
CH3
CH3
1H-NMR-Spektrum
CH3
6H
4H
7
ppm
2
kombinierte Symmetrieoperationen Gruppentheorie
C2
Br b
[E]
Bra
Bra Bra
Br Br
b = b
Cla Cla
Cl b Cl b
[
Bra Brb
Br Br
b = a
v] Cla Cla
Cl b Cl b
C
Clb
Cl a
v
v'
Bra Brb
Br Br
[C2]Clb = Cla
a
b
Cl
Cl
b a
[
Bra Bra
Br Br
b = b
]
v‘ Cl Cl
a
b
Cl
Cl
b a
Matrixschreibweise:
Aussehen der [E], [C2], [v], [v.]-Matrizen später
Kombinationen von Symmetrieoperationen:
EE = E C2C2 = E
vv= E v‘v‘ = E
EC2 = E Ev = v
Ev‘ = v‘
Brb Bra
Bra
Bra
Br
Br
Br
Br
b
a
b
b
[C2 ]x [ v ]x = [C2 ]x = = [ v ' ]
Cla
Cla
Cl b
Clb
2. 1.
Cl Cl
Cl
Cla
b
b a
Kombinierte Symmetrieoperationen
Bra
Bra
Br
Br
b
b
[C2 ] x [ v ] x = [ v ' ]
Cla
Cla
2. 1. Cl
b
Clb
Bra
Bra
Br
Br
b
b
[ v ] x [C2 ] x = [ v ' ]
Cla
Cla
2. 1. Cl
b
Clb
hier: C2v = vC2
kommutativ nicht allgemeingültig!
Ergebnis meist abhängig von der
Reihenfolge der Symmetrieoperation
z.B. S4 x v v x S4
Beispiel nicht-kommutativ:
D
C
S4
A
v
B
C
B
D
D
A
A
C
B
v
S4
C
D
B
A
C2
A
B
D
C
S4 x v v x S4
Symmetrieoperationen - Multiplikationstafel
1.
2.
E
C2
v
v'
E
E
C2
v
v'
C2
C2
E
v'
v
v
v
v'
E
C2
v'
v'
v
C2
E
Lesart zunächst Zeilen- dann Spaltenoperation
(hier allerdings irrelevant da kommutativ)
v x C2 =v‘
etwas Mathematik - Gruppentheorie & -axiome
Eine Menge G von (mathematischen) Elementen A, B, C heißt Gruppe,
wenn die folgenden 4 Axiome erfüllt sind:
Elemente (mathematischer Sinn): {E, C2, v, v´G}
Axiom 1: Verknüpfung o zwischen den Elementen A,B ({A,B G})
führt zu einer eindeutigen Zuordnung:
C = AoB
wobei {C G} Vollständigkeit
vgl.: Multiplikationstafel
von CH2Br2 Beispiel
E C2 v v'
E E C2 v v'
C2 C2 E v' v
v v v' E C2
v' v' v C2 E
z.B. v´= C2ov
{v´G}
etwas Mathematik - Gruppentheorie & -axiome
Axiom 2: Die Verknüpfung o erfüllt das Assoziativgesetz:
(AoB)oC=Ao(BoC)
CH2Br2 Beispiel:
E C2 v v'
E E C2 v v'
C2 C2 E v' v
v v v' E C2
v' v' v C2 E
C2o(vov´)= C2oC2=E
C2
(C2ov)ov´= v´ov´=E
v´
C2o(vov´)=(C2ov)ov´
Assoziativgesetz erfüllt
etwas Mathematik - Gruppentheorie & -axiome
Axiom 3: Existenz eines neutralen Elementes für alle Elemente von G.
EoA = AoE = A
CH2Br2 Beispiel:
EoC2 = C2oE = C2
Axiom 4: Existenz eines inversen Elementes für alle Elemente von G.
AoA-1 = A-1oA =E
CH2Br2 Beispiel:
E C2 v v'
E E C2 v v'
C2 C2 E v' v
v v v' E C2
v' v' v C2 E
EoE =
C2oC2 =
vov =
v´ov´ =
E
E
E
E
etwas Mathematik - Gruppentheorie & -axiome
zusätzlich - kein Kriterium für eine Gruppe:
wenn sämtliche binäre Operationen kommutieren Abel´sche Gruppe
AoB = AoB
CH2Br2 Beispiel: hier erfüllt!
E C2 v v'
E E C2 v v'
C2 C2 E v' v
v v v' E C2
v' v' v C2 E
voC2 = C2ov
sowie für alle weiteren Kombinationen!
(= symmetrische Matrix i.a. eher Ausnahme)
Abel´sche Gruppe
Symbol der Punktgruppe C2v
S6-Drehspiegelachse
H
H
H 60°
H
H
H
Newman Projektion
Ethan
H
H
H
H
H
H
Diagramm zur Bestimmung der Punktgruppe nach Schönflies
Molekül
ja
Dh
F
l
u
ja linear? nein
ß
d
i?
ja 2 oder mehr nein
i
Cn, n > 2 ?
a
nein
g
ja
r
i?
Flußdiagramm 2 a
ja
m
C5 ? nein
m
1
Cv
Ih
Oh
Td
lineare Gruppen
z.B
C60
kubische Gruppen
von Flußdiagramm 1
Cn? N
J
J ?N
h
J ? N
J n C2´s ^Cn ?
n2
N
?J
J i?N
h
N
n d ?
J
N
n v ?
N
J
S2n ?
N
Dnh
Dnd
Dn
Cn
S2n
Cnv Cnh
Cs
Ci
C1
F
l
u
ß
d
i
a
g
r
a
m
m
2
Ordnung
1
2
2
assymetrisch
zyklische Gruppe
n
2n
2n
2n
2n
4n
4n
dissymetrisch
Diedergruppe
dissymetrisch
kubische Gruppe
24
48
120
Ordnung: Gesamtzahl der Symmetrieoperationen
z.B. C2v: n =2
Ordnung=4
Kubische Gruppen
Tetraeder
Oktaeder
Ikosaeder
Ikosaeder
Dodekaeder
Td-Symmetrie
C2, S4
C3-Achsen
X
X
X
M
C2, S4
M
C2, S4
X
X
X
C3
X
Beispiele für Punktgruppen
O
S
C1
F
Ph
Me
F
I
C4v
Cl
Cl
N
B
Cl
CS
F
F
Br
H
Br
Cl
Ci
C2
Br
O
N
F
H
F
N
O
B
C3h
C2h
Cl
H
H
C3v
H
F
F
B
O
F
H
D3h
F
Fe
Fe
Co
F
F
Co
F
D5h
D5d
D3
chiral!
F
F
Oh
C60 Ih
Punktgruppenbestimmung Ferrocen ekliptisch
N
Y
1)
Fe
C5
Y
C5
Y
2)
C2
Fe
=
C2
D5h
3)
Fe h
D5h
Klasse von Symmetrieoperationen
B = X-1AX Ähnlichkeitstransformation:
B und A zueinander konjugiert
C3v
E
C31
C32
v
v'
v"
E
E
C31
C32
v
v'
v"
C31
C31
C32
E
v'
v"
v
C32
C32
E
C31
v"
v
v'
C32vC31 = C32v’ = v”
C32C31C31
= C31
vC31v
= C32
v
v
v"
v'
E
C32
C31
v'
v'
v
v"
C31
E
C32
v”
v"
v'
v
C32
C32
E
N
H
C3v
EC31E
= C31
C31C31C32 = C31
v'C31v' = C32
Zur Erinnerung: C32=C31,-1 v=v-1
H
H
Resultat: C32vC31 immer v, v’ oder v”
v’
v’’
jedoch nie E, C31 or C32.
v, v’ and v” sind in der gleichen KLASSE.
Gleiches gilt für X-1EX = E
sowie
X-1 C31 X und X-1 C32 X = C31 or C32
für alle X der Gruppe.
Punktgruppe C3v: 6 Symmetrieoperationen
E
C31, C32
3 Klassen
v, v’ , v”
Zur Bedeutung später!
vorneweg: Anzahl Klassen = Anzahl irreduzibler Darstellung
Darstellung der Gruppen - Charaktertafeln
Schemata zur Darstellung der Effekte von Symmetrieoperationen
auf Moleküle sind sehr aufwendig.
C4
z.B.
Bevorzugt: numerische Darstellung der Effekte
Alternative: Zuordnung/Verwendung von Vektoren
Auswirkung der Sym-Ops auf Vektoren numerisch
Beispiel : SO2 (dreitomig, C2v-Symmetrie)
z
y
S
x
z
x
O
z
y
x
y
O
y
Große Pfeile in y-Richtung Translation
& -vektor, Ty
C2v-Symmetrie: Sym-Ops: E, C2, xz and yz.
ETy=Ty
yTy=Ty
keine Änderung Symbol +1
C2 and xz Vorzeichenumkehr
numerisches Symbol -1.
S
O
O
C2 rotation
S
O
O
E(Ty) = (+1)(Ty)
C2(Ty) = (-1)(Ty)
xz(Ty) = (-1)(Ty)
yz(Ty) = (+1)(Ty)
Ty: BASISVEKTOR
±1 numerische Darstellung des Einflusses der Sym-Ops auf Ty
Analog: Tx und Tz Vektoren.
ebenso: ROTATIONSVEKTOREN
z
x
y
S
O
z
x
O
S
O
z
y
x
O
y
Blick entlang z-Achse
Rotationsvektor um z-Achse: Rz = Basisvektor.
E(Rz) = (+1)(Rz)
C2(Rz) = (+1)(Rz)
xz(Rz) = (-1)(Rz)
yz(Rz) = (-1)(Rz)
Analog: Rx, Ry und Tx und Tz-Vektoren:
C2v
E
C2
xz
yz
+1
+1
+1
+1
+1
+1
-1
-1
+1
-1
+1
-1
+1
-1
-1
+1
Tz
Rz
Tx, Ry
Ty, Rx
korrekte Darstellung der Punktgruppe C2v?
Beleg durch Überprüfung der Multiplikationstafel
C2v Multiplikationstafel:
xz yz = C2
C2v
E
C2
xz
yz
E
C2
xz
yz
+1
+1
+1
+1
+1
+1
-1
-1
+1
-1
+1
-1
+1
-1
-1
+1
Tz Darstellung :
(+1)(+1)
Rz Darstellung :
(-1)(-1)
Tx/Ry Darstellung : (+1)(-1)
Ty/Rx Darstellung : (-1)(+1)
Multiplikationstafel erfüllt:
= (+1)
= (+1)
= (-1)
= (-1)
Tz
Rz
Tx, Ry
Ty, Rx
Weiteres Beispiel: NH3 in C3v-Symmetrie
z
y
x
N
H
H
H
Translation in x und y-Richtung
y
H
Ty
N
H
Tx
H
x
Rotation von Tx and Ty um 120o (C3-Achse)
Ty
Ty
H
120o
N
TTxx''
H
H
TTxx
TTyy''
Zusammenhang zwischen "erzeugten" Vektoren, Tx' and Ty'
und den "alten" Vektoren Tx and Ty? (Basisvektoren)
Tx' = (cos 120o)Tx - (sin 120o)Ty = -(1/2)Tx - (3/2)Ty
Ty' = (sin 120o)Tx + (cos 120o)Ty= +(3/2)Tx - (1/2)Ty
Ty
cos(30o)Tx= (sin 120o)Tx
30o
(cos 120o)Ty
Tx
Ty'
Tx' = (cos 120o)Tx - (sin 120o)Ty = -(1/2)Tx - (3/2)Ty
Ty' = (sin 120o)Tx + (cos 120o)Ty= +(3/2)Tx - (1/2)Ty
Tx und Ty "mischen" können nicht voneinander separiert werden!
Schreibt man besser als Matrix
[T '
x
[
Ty ' = Tx
(1 / 2) ( 3 / 2)
Ty
(
3
/
2
)
(
1
/
2
)
Matrizen - etwas Auffrischung
Matrizenmultiplikation: X·Y=Z
x11 x12
y11 y12
x
x 22
21
y 21 y 22
x 31 x 32
z11 z12 z13
y13
=
z
z
z
21
22
23
y 23
z 31 z 32 z 33
Regel: "i-te Zeile mal j-te Spalte"
z11 = x11 y11 x12 y21
z12 = x11 y12 x12 y22
z13 = x11 y13 x12 y23
z21 = x21 y11 x22 y21
z22 = x21 y12 x22 y22
z23 = x21 y13 x22 y23
Zeile
Spalte
z31 = x31 y11 x32 y21
z32 = x31 y12 x32 y22
z33 = x31 y13 x32 y23
Z: quadratische Matrix (Anzahl Zeilen = Anzahl Spalten)
c: Spur der Matrix = Summe der Diagonalelemente
c = z11 + z22 + z33
ab hier
(1 / 2) ( 3 / 2)
[Tx Ty = [Tx Ty
(
3
/
2
)
(
1
/
2
)
Für jede Symmetrieoperation der Punktgruppe C3v läßt sich eine
Matrix aufstellen.
2 x 2 TRANSFORMATIONSMATRIZEN
1 0
E
0
1
v 's
1 0
0
1
(1 / 2) ( 3 / 2)
C
( 3 / 2) (1 / 2)
1
3
( 1 / 2) ( 3 / 2)
(
3
/
2
)
(
1
/
2
)
( 1 / 2 ) ( 3 / 2)
C 23
( 3 / 2) ( 1 / 2)
( 1 / 2) ( 3 / 2)
(
3
/
2
)
(
1
/
2
)
Tz und Rz Vektoren von NH3:
z
z
TTzz
H
y
N
N
x
x
H
H
N
H
Rz
H
H
y
H
Rz
H
H
H
Tz +1 für alle Symmetrieoperationen.
N
Rz +1 für E, C31, C32; -1 für 3 v's,
H
H
v
Rz
H
N
H
H
Rz
Rz, = -Rz
Darstellung der Translations- und Rotationsvektoren von NH3
E
C31
C32
v
v
v
Tz
+1
+1
+1
+1
+1
+1
Rz
+1
+1
+1
-1
-1
-1
(Tx,Ty)
oder
(Rx,Ry)
1 0 (1 / 2 ) ( 3 / 2 )
0 1 ( 3 / 2 ) (1 / 2 )
1 0
0 1
(1 / 2 ) ( 3 / 2 )
( 3 / 2 ) (1 / 2 )
(1 / 2 ) ( 3 / 2 )
( 3 / 2 ) (1 / 2 )
(1 / 2 ) ( 3 / 2 )
( 3 / 2 ) (1 / 2 )
1x1 Vektoren = Zahlen
2x2 Vektor = Matrix
Darstellung der C3v-Punktgruppe (Vollständigkeit)?
Beleg durch Matrizenmultiplikation/Multiplikationstafel
erfüllt (ohne Beweis)
Translations- oder Rotationvektoren zur Erzeugung der Darstellungen
BASISVEKTOREN Darstellungen
Wahl "beliebiger" BASISVEKTOREN, z.B. ORBITALE.
z.B. py Orbital von O-Atom von Wasser:
z
–
O
+
y
x
H
E
+1
C2
-1
H
xz
-1
yz
+1
py Orbital gleiche Darstellung wie Ty Vektor.
dx2-y2-Orbital des Xe-Atoms von XeF4 Punktgruppe D4h :
x
F
+
F
– Xe –
+
F
Blick in Richtung C4-Achse
y
F
E
2C4
C2
2C2'
2C2"
i
2S4
h
2v
2d
dx2-y2 +1
-1
+1
+1
-1
+1
-1
+1
+1
-1
NB:
(1) 2C4 steht für C41 und C43; 2S4 für S41 und S43
(2) C2 = C42
(3) C2', v beinhaltet Xe-F Bdg.; C2", d schneidet F-Xe-F Winkel
px, py-Orbitale
F
px
–
– Xe +
+
F
F
y
C4
Py
F
x
Rotation um 90o (i.e. C41) transformiert px in –py, und py in px.
2 x 2 Transformationsmatrizen.
[p'
x
[
p' y = p x
0 1
py
1
0
für C41
Weitere Symm-Ops in D4h-Symmetrie:
ebenfalls 2 x 2 Transformationsmatrizen für px, py
Atomorbitale als Basisfunktionen:
wichtige Regeln:
- s-Orbitale: kugelsymmetrisch
+1 für alle Symmetrieoperationen
- 2 oder mehrere Orbitale, die durch Symmetrieoperationen
vertauschbar sind, müssen die gleiche Energie besitzen (entartet)!
Symmetrieoperationen führen zu keiner Veränderung der Energie
Reduzible und Irreduzible Darstellungen
Bislang haben wir nur 1 oder 2 Vektoren als Darstellungen benutzt:
"Freiwillige Selbstbeschränkung:" keine Grenze nach oben
Jede Darstellung mit n (unabhängigen) Vektoren/Funktionen
besteht aus n x n Matrizen.
unendliche Zahl von möglichen Darstellungen
Aber:!
Zerlegung in einige wenige (irreduzible) Darstellungen möglich!
Beispiel NH3: Basisvektoren a,b,c entlang NH-Bindungen
v"
Ha
Hb
N
Hc
a b (a')
b a (b')
c c (c')
Spiegelung an v"
Transformationsmatrix:
a ' 0 1 0 a 0 a 1 b 0 c b
b' = 1 0 0 b = 1 a 0 b 0 c = a
c' 0 0 1 c 0 a 0 b 1 c c
Basis N-H Bindungsvektoren von NH3 (C3v-Symmetrie)
3 x 3 Transformationsmatrizen für Symmetrieoperationen
1 0 0
E 0 1 0
0 0 1
v
1 0 0
0
0
1
0 1 0
0 0 1
C13 1 0 0
0 1 0
0 1 0
C 23 0 0 1
1 0 0
0 0 1
0 1 0
' v 0 1 0 "v 1 0 0
0 0 1
1 0 0
Darstellung von C3v ?
Multiplikationstafel
1 0 0 0 0 1 1 0 0 1 0 0 1 0 0 0 0 1 1 1 0 0 0 0
v C13 = 0 0 1 1 0 0 = 0 0 0 1 1 0 0 0 0 0 1 1 0 1 0 0 1 0
0 1 0 0 1 0 0 0 1 1 0 0 0 0 1 0 0 1 0 1 1 0 0 0
0 0 1
= 0 1 0 = ' v
korrekt
1 0 0
Vergleich mit den Translationsvektoren: Tx, Ty, Tz
Transformationsmatrizen (3 x 3) Tx, Ty, Tz für NH3 (C3v)
1 0 0
E 0 1 0
0 0 1
C 23
' v
C13
(1 / 2 )
( 3 / 2)
0
(1 / 2 ) ( 3 / 2 ) 0
(
3
/
2
)
(
1
/
2
)
0
0
0
1
(1 / 2 )
( 3 / 2)
0
( 3 / 2 ) 0
(1 / 2 ) 0
0
1
v
1 0 0
0
1
0
0 0 1
( 3 / 2 ) 0
(1 / 2 ) 0 "v
0
1
(1 / 2 )
( 3 / 2)
0
0 0 1
C13 1 0 0
0 1 0
zum Vergleich
Bindungsvektoren
( 3 / 2 ) 0
(1 / 2 ) 0
0
1
Unterschiede der Darstellungen/Matrizen
Darstellung:
Tx, Ty, Tz
(1 / 2 ) ( 3 / 2 ) 0
1
C 3 ( 3 / 2 ) (1 / 2 ) 0
0
0
1
von Null-verschiedene Elemente:
in Blöcken "Blockmatrix":
hier: 2x2 und 1x1
Bindungsvektor
0 0 1
C13 1 0 0
0 1 0
von Null-verschiedene
Elemente "zufällig" verteilt
In jeder beliebigen Darstellung sind die von Null-verschiedenen
Matrixelemente zufällig verteilt!
lassen sich aber in Blockmatrizen überführen (Ausreduzieren)
Y1
Aus-
"0"
Y2
Y3
X
reduzieren
"0"
Ym
X-Matrix
Y1, Y2 ... Ym Matrizen Darstellungen der Punktgruppe
Beispiel NH3 (C3v-Symmetrie):
Tx, Ty 2 x 2 Blockmatrix/Darstellung
Tz
1x1
""
X-Matrix: reduzible Darstellung
Y-Matrizen: irreduzible Darstellungen
Bedeutung irreduzibler Darstellungen
Atom- oder Molekülorbital, Molekülschwingung ..:
Basis für eine irreduzible Darstellung
Eigenschaften der Orbitale..
abhängig von ihrer irreduziblen Darstellung
Aus: reduziblen Darstellungen irreduzible Darstellungen
Wie? später?
zunächst wichtige Matrizeneigenschaften
Charakter (Spur) einer Matrix, c
a 11
a 21
...
...
a n1
a 12
a 22
...
...
a n2
a 13
a 23
...
...
a n3
....... a 1n
....... a 2 n
....... ...
....... ...
....... a nn
Summe der Diagonalelemente
c = a11 + a22 + a33 + ...... + ann = Saii (i = 1.. n)
c nur definiert für quadratische Matrix (Anzahl Spalten = Anzahl Zeilen)
Charakter gibt wichtige Eigenschaften einer Matrix wider!
"erspart viel Schreibarbeit"
Transformationsmatrizen für Bindungsvektoren in C3v-Symmetrie
1 0 0
E 0 1 0
0 0 1
0 1 0
2
C 3 0 0 1
1 0 0
' v
0 0 1
0 1 0
1 0 0
c= 3
c= 0
c= 1
0 0 1
1
C 3 1 0 0
0 1 0
v
"v
1 0 0
0 0 1
0 1 0
0 1 0
1
0
0
0 0 1
c= 0
c= 1
c= 1
Transformationsmatrizen für Tx,Ty,Tz-Vektoren
1 0 0
E 0 1 0
0 0 1
c= 3
(1 / 2 ) ( 3 / 2 ) 0
C 23 ( 3 / 2 ) (1 / 2 ) 0
0
0
1
' v
(1 / 2 ) ( 3 / 2 ) 0
C13 ( 3 / 2 ) (1 / 2 ) 0
0
0
1
(1 / 2 ) ( 3 / 2 ) 0
(
3
/
2
)
(
1
/
2
)
0
0
0
1
c= 0
c= 1
v
"v
1 0 0
0
1
0
0 0 1
c= 0
c= 1
(1 / 2 ) ( 3 / 2 ) 0
(
3
/
2
)
(
1
/
2
)
0
0
0
1
c= 1
Eigenschaften von Charakteren einer Tranformationsmatrix
1.
Symmetrieoperationen der gleichen Klasse haben den
gleichen Charakter:
für unser Beispiel in C3v-Symmetrie: C31 and C32 sowie v's
2.
Für unabhängige Vektoren wird der gleiche Charakter
erhalten:
für unser Beispiel in C3v-Symmetrie: Bindungs- u. Translationsvektoren
Die Summe der Charaktere der irreduziblen Komponenten ergibt
den Charakter der reduziblen Darstellung.
Symm-Ops der gleichen Klasse gleicher Charakter:
Charakter der Klasse wird nur einmal aufgeführt:
E
2C3
3v
3
2
1
0
-1
1
1
0
1
reduzible Darstellung
irreduzible Darstellungen
(Bdgs.- oder Translationsvektor)
(2 x 2)
(1 x 1)
Bezeichnung/Symbole der irreduziblen Darstellungen
MULLIKEN-SYMBOLE
1 x 1 Darstellungen/Matrizen
2 x 2 Darstellungen/Matrizen
3 x 3 Darstellungen/Matrizen
A
B
A oder B
E
T
c > 0 bzgl. Drehung um Hauptachse
(symmetrisch bzgl. Drehung)
c < 0 bzgl. Drehung um Hauptachse
(antisymmetrisch bzgl. Drehung)
zusätzliche Indizes:
g
u
c > 0 bzgl. Inversion ('gerade')
c < 0 bzgl. Inversion ('ungerade')
(d.h. symmetrisch/antisymmetrisch bzgl. i)
'
"
c > 0 bzgl. Spiegelung an h (symm.)
c < 0 bzgl. Spiegelung an h (antisymm.)
1
zusätzliche Unterscheidungen bzgl.
Drehungen und Spiegelungen
2
3
CHARAKTERTAFELN
C2v
E
C2
xz
yz
A1
A2
B1
B2
+1
+1
+1
+1
+1
+1
-1
-1
+1
-1
+1
-1
+1
-1
-1
+1
Mulliken
Symbole
Tz
Rz
Tx oder Ry
Ty oder Rx
C3v
E
2C3
3v
A1
A2
E
+1
+1
+2
+1
+1
-1
+1
-1
0
Tz
Rz
(Tx, Ty) oder (Rx, Ry)
Charaktertafeln
- Aufstellung der Charaktere der Transformationsmatrizen
für alle irreduziblen Darstellungen einer Punktgruppe
- Tafeln für sämtliche Punktgruppen verfügbar
werden demnächst verteilt
Wie erhält man aus einer reduziblen Darstellung
die irreduziblen Komponenten?
Ausreduzieren
Ausreduzier-Formel
1
a p = c( R ) c p ( R )
h R
ap = Anzahl der irreduziblen Darstellung p in der reduziblen Darstellung
h = Anzahl der Symm-Op´s der Punktgruppe = Ordnung der Punktgruppe
c(R) = Charakter der Symm-Op R der reduziblen Darstellung
cp(R) = Charakter der Symm-Op R der irreduziblen Darstellung p
(z.B. a2) aus Charaktertafel
abstrakt! am besten erklärt durch Beispiele!
Beispiel Bindungsvektordarstellung: NH3 (C3V-Symmetrie)
reduzible Darstellung
E
3
2C3
0
3v
1
Schwingungsmoden aus irreduzibler Darstellung
benötigt wird Charaktertafel
C3v
E
2C3
3v
A1
A2
E
+1
+1
+2
+1
+1
-1
+1
-1
0
Ausreduzieren
1
a p = c( R ) c p ( R )
h R
E
3
2C3
0
3v
1
a A1
1
= [( 3 1) (0 2 1) (1 3 1)] = 1
6
a A2
1
= [( 3 1) (0 2 1) (1 3 1)] = 0
6
1
a E = [( 3 2) (0 2 1) (1 3 0)] = 1
6
GBindungsvektor = A1 + E
G: Symbol für reduzible Darstellung
h=1+2+3=6
C3v
E
A1 +1
A2 +1
E +2
2C3 3v
+1
+1
-1
+1
-1
0
Schwingungsspektroskopie - Prinzip
H
r0
Cl
Hook´sches Federmodell
mechanische Feder
k
Auslenkung aus r0
Energieaufnahme E
r0 wird sich wieder einstellen
Schwingung
F=-k.x
E = - ½ . k . x2
harmonischer Oszillator - IR-Spektroskopie
Schwingung: Anregung durch elektromagnetische Wellen (hn)
V(r)
E4 = 9/2 hn
n=4
E3 = 7/2 hn
n=3
E2 = 7/2 hn
E1 = 5/2 hn
hn
n=2
hn
n=1
hn
n=0
E0 = 1/2 hn
rr00
Atomabstand r
V(r) = ½ k . x2 = 2 2 . m .nosc .x2
V(r): potentielle Energie k: Kraftkonstante
x: Auslenkung
m: reduzierte Masse
nosc: Schwingungsfrequenz des harm. Oszillators
1
n osc =
2
k
m
höhere Frequenz für höhere Kraftkonstante k!
k Maß für Bindungsstärke (BDE)??
BDE
Korrelation k mit Bindungsabstand r0
[kcal/mol]
Badger´s Regel
k = 1.86 (r0- dij)-3
dij = Konstante für Atome i und j von Periode i und j
k [mdyn/Å]
erfüllt!
harmonischer Oszillator
V(r)
E4 = 9/2 hn
n=4
E3 = 7/2 hn
n=3
E2 = 7/2 hn
E1 = 5/2 hn
hn
n=2
hn
n=1
hn
n=0
E0 = 1/2 hn
rr00
Atomabstand r
Auswahlregel: Dn = 1
aber! anharmonisches Potential = Bindungsbruch für r >> r0
!
anharmonisches Potential - Morsepotential
H
H
H
H
BDE
andere Auswahlregel!
Oberschwingungungen Dn = 2, 3 erlaubt!
intensitätsschwächer
Auswahlregeln - Normalkoordinatenanalyse
- Anzahl Molekül-Schwingungen (n) eines n-atomigen Moleküls ?:
- jedes Atom kann sich in x,y,z-Richtung bewegen: 3n-Freiheitsgrade
aber: nicht alle entsprechen Schwingungen:
z
Bewegung der Atome: Translation in y-Richtung
y
O
x
z
x
H
z
y
x
H
y
Massenschwerpunkt ändert sich!
keine Schwingung
analog Rotation Schwingung
zz
x O
y
z
x
H
z
y
x
H
H
O
H
y
Blick entlang z-Achse
lineare Moleküle:
3n-5 Schwingungen: z.B. CO2: 3x3-5=4 n´s
(-3 Translationen -2 Rotationen)
nicht-lineare Moleküle: 3n-6 Schwingungen: z.B. H2O: 3x3-6=3 n´s
(-3 Translationen -3 Rotationen)
Auswahlregeln
Resultat Quantenchemie
Dipolmoment muß sich bei Schwingung ändern!
Valenzschwingung
Bindungslängenänderung
IR-aktiv
O
O
O IR-aktiv
nasym: 2350 cm-1
H
H
C
nsym: 3652 cm-1
O
O
IR-aktiv
O
nasym: 1340 cm-1
H
H
C
IR-inaktiv
(Raman-aktiv)
nasym: 3756 cm-1
Deformationsschwingung
Winkeländerung
IR-aktiv H
O
O
H
-1
nsym: 1596 cm
C
O
666 cm-1 entartet
O
+
C
-
-1
O
+
666 cm entartet
IR-aktiv
Wie bestimmt man die "erlaubten" Schwingungen?
Vorhersage/Ermittlung mittels Gruppentheorie/Symmetrieeigenschaften
jede Schwingungsmode zeigt ein eigenes "Muster (Vektor)"
für die Verrückung der Atome(Dx,Dy,Dy)
Eigensymmetrie = irreduzible Darstellung
Bei Kenntnis des Aussehehens der Schwingungsmoden:
Bestimmung der irreduziblen Darstellung
Anwendung der Auswahlregeln.
Schwingungsmoden sind aber i.a. NICHT bekannt!!
Bestimmung der Moden durch Ausnutzung der Symmetrieeigenschaften
Lösungsansatz:
- 3 Vektoren (x,y,z) für jedes Atom des Moleküls 3n Vektoren
3n Darstellungen: G3n
z3
x3 3
y3
z1
x1
1
9 Basisvektoren entlang Achsen
z2
y1
z.B. H2O
x2
2
y2
Anwendung der Symmetrieoperationen: C2v-Symmetrie (E, C2, v, v´)
z3
C2
x3 3
y3
z1
x1
1
z2
y1
x2
2
H2O:
C2-Achse:
x1 -x2
x2 -x1
x3 -x3
y1 -y2
y2 -y1
y3 -y3
z1 z2
z2 z1
z3 z3
y2
Transformation in Matrixschreibweise
C2
E
x1 x1 y1 y1
x2 x2 y2 y2
x3 x3 y3 y3
z1 z1
z2 z2
z3 z3
x1 y1 z1 x2 y2 z2 x3 y3 z3
1
0
0
0
0
0
0
0
0
0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0
0 0 1 0 0 0 0 0
0 0 0 1 0 0 0 0
0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
x1 -x2 y1 -y2 z1 z2
x2 -x1 y2 -y1 z2 z1
x3 -x3 y3 -y3 z3 z3
x1 y1 z1
0
0
0
0
0
0
1 0
0 1
0
0
0
0
0
0
0
0
x2 y2 z2 x3 y3 z3
0 1
0
0
1 0
0 1
0 0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0 0
0
0 0
0
0 0
0
0 0
0
0 0
1 0 0
0 1 0
0
0 1
0
0
Transformationsmatrix: dreiatomiges Molekül in C2v Symmetrie
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0 0
0 0
0 0
1 0
0 1
0 0
0 0
0 0
0 0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0 1
0
0 0
0 0 1 0 0
0 0 0 1 0
0 0 0 0 0
0 0
1 0
0 0
0
0
0
0 0
0 0
0 1
0 0
0 0
0
0
0 0
0 0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0 0
0 0
0 0
0 0
0 0
0 0
1 0
0 1
E
c(E) = 9
0
xz
c(xz) = 1
0
0
0
0
0
0
1 0
0 1
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0 1
0
0
0
0 0
0
0 0
0
0 0
0
0 0
0
0 0
1 0 0
0 1 0
0
0 1
0
0
1 0
0 1
0 0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0 0
0
0 0
1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
0 0
0 0
0 0
0
0
0
1 0
0 1
0 0
0 0
0 0
0
0
0 0
0 0
0
0 0
0 0 0
0 0 0
0 0 0
0 0 0
0 0 0
1 0 0
0 1 0
0 0 1
C2
c(C2) = -1
0
yz
c(yz) = 3
E C2 xz yz
Charakter: 9 -1 1 3
Transformationsmatrix schwierig zu analysieren
speziell für größere Moleküle
wichtig nur Charakter c der Matrix
C2: c(C2) = -1
0
0
0
0
0
0
1 0
0 1
0
0
0
0
0
0
0
0
0 1
0
0
1 0
0 1
0 0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0 0
0
0 0
0
0 0
0
0 0
0
0 0
1 0 0
0 1 0
0
0 1
0
C2
0
1
3
2
1 2
2
3 3
bzgl. C2: nur Atom 3!
nur unbewegte Atome tragen zur Spur/Charakter bei!!!!!!
Beitrag unverschobener Atome bzgl. E: +3 pro Atom
E: c(E) = 9
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
1
hier: 9/3 = 3
Auswirkung von Inversionszentren, i
z
ii
y
x
x'
y'
z'
0
1 0
[x' y' z' = [x y z 0 1 0
0 1
0
Beitrag von -3 pro unverschobenem Atom zu c(i) in G3n
Auswirkung einer Spiegelebene,
xzxz
z
y
z'
y'
2 Achsen in Ebene
x
x'
1 0 0
[x' y' z' = [x y z 0 1 01
0 0
1
Beitrag von -3 pro unverschobenem Atom zu c() in G3n
Auswirkung einer Drehachse, Cn
z'
y
x'
(360/n)
z
x
(360/n)
y'
cos a sin a 0
[x' y' z' = [x y z sin a cos a 0 a = (360/n)°
0
0
1
Beitrag eines unverschobenen Atoms zu c(Cn) in G3n: 1+2·cos(360/n)
z.B. C2-Achse: 1+2·cos(180)=1+2·(-1)=-1
Auswirkung einer Drehspiegelachse, Sn
cos a sin a 0
[x' y' z' = [x y z sin a cos a 0
0
0
1
Drehung wie Cn-Achse: z´=-z
Beitrag eines unverschobenen Atoms zu c(Cn) in G3n: -1+2·cos(360/n)
z.B. S4-Achse: -1+2·cos(90)=-1+2·(0)=-1
Zusammenfassung:
Beiträge zu c(R)/pro unverschobenem Atom von G3N:
R = E
i
Cn
Sn
+3
-3
+1
+1+2·cos(360/n))
-1 +2·cos(360/n))
ergibt für unser 3-atomiges Molekül:
Anzahl unverschobener Atome
c(R)/pro unverschobenem Atom
G3N
E
3
3
9
(3·3)
C2
1
-1
-1
xz
1
1
1
yz
3
1
3
(1·-1)
(1·1)
(3·1)
Aussehen der irreduziblen Darstellungen?
Ausreduzieren liefert: a p =
G3N
A1
A1
1
c( R ) c p ( R )
h R
9
-1
1
3
+1
+1
+1
+1
aA1=1/4·(9·1+(-1)·1+1·1+3·1)=1/4·12 = 3 3 A1
G3N
B
B1
1
9
-1
1
3
+1
1
1
-1
aB2=1/4·(9·1+(-1)·1+1·1+3·(-1))=1/4·6 = 2 2 B1
C2v
E
C2
xz
A1
A2
B1
B2
+1
+1
+1
+1
+1
+1
-1
-1
+1
-1
+1
-1
yz
+1
-1
-1
+1
h=4
Tz
Rz
Tx, Ry
Ty, Rx
analog für A2 und B2
G3N = 3A1 + A2 + 2B1 + 3B2
G3N = 3A1 + A2 + 2B1 + 3B2
beinhaltet noch 3 Translationen und 3 Rotationen
GT = A1 + B1 + B2
GR = A2 + B1 + B2
Gvib= G3n -(GT +GR )
Gvib= 3A1 + A2 + 2B1 + 3B2 - A1 - B1- B2 - A2 - B1 - B2
= 2A1 + B2
C2v
E
C2
xz
A1
A2
B1
B2
+1
+1
+1
+1
+1
+1
-1
-1
+1
-1
+1
-1
yz
+ 1 Tz
-1
Rz
-1 Tx, Ry
+1 Ty, Rx
Weitere Beispiele zur Bestimmung von Gvib, via G3N:
NH3
N
(C3v)
H
H
H
C3v
E
unverschobene Atome
4
c/unverschobenes Atom 3
\ G3N
2C3
1
0
12
0
3v
2
1
2
Ausreduzieren G3N = 3A1 + A2 + 4E
GT+R (Charaktertafel) = A1 + A2 + 2E
Gvib = 2A1 + 2E
Jede E-Mode entspricht 2 Schwingungen (2-fach entartet)
H
CH4 (Td)
C
H
H
Td
unversch. Atome
c/u.A.
\ G3N
H
E
5
3
15
8C3
2
0
0
3C2
1
-1
-1
6S4
1
-1
-1
Ausreduzieren: G3N = A1 + E + T1 + 3T2
GT+R = T1 + T2,
Gvib = A1 + E + 2T2
E: 2-fach entartet; T: 3-fach entartet
6d
3
1
3
F
XeF4 (D4h)
F
Xe
D4h
u.A.
c/u.A.
E
5
3
2C4
1
1
\G3N
15
1
F
F
C2 2C2'
1 3
-1 -1
2C2" i 2S4
1
1 1
-1 -3 -1
-1
-3
-1
-1
-1
h 2v 2d
5
3
1
1
1
1
5
3
1
Ausreduzieren G3N = A1g + A2g + B1g + B2g +Eg +2A2u + B2u + 3Eu
GT+R (Charaktertafel) = A2g + Eg + A2u + Eu,
\
Gvib = A1g + B1g + B2g + A2u + B2u + 2Eu
Symmetrierasse der Schwingungsmoden läßt sich so bestimmen:
Art/Aussehen der Schwingung:
INTERNEN KOORDINATEN Methode.
Verwendung interner Koordinaten
interne Koordinaten?
Änderung
Schwingungsmode
• Bindungslänge
Valenz- / Streckschwingung
• Bindungswinkel
Deformationsschwingung
• Torsionswinkel
""
Beispiel: C2v-symmetrisches Molekül
r1
H
O r2
q
H
Basisvektoren: Dr1, Dr2 (Streckschwing.)
Dq (Deformationsschwing.)
Charakter: nur unverschobene Vektoren berücksichtigt ( +1 to c).
C2v
GDef.
GStreck
E
1
2
C2
1
0
xz
1
2
yz
1
0
N.B. Transformationsmatrix für GStreck:
E, xz: 1 0
C2, yz : 0 1
0 1
1
0
c=2
c=0
Bestimmung der irreduziblen Darstellungen
GDef. (1 1 1 1) : irreduzible Darstellung: A1
GStreck (2 0 2 0): keine irreduzible Darstellung
ausreduzieren
Ausreduzieren liefert: a p =
GStreck
A1
A1
1
c( R ) c p ( R )
h R
2
0
0
2
+1
+1
+1
+1
aA1=1/4·(2·1+0·1+0·1+2·1)=1/4·4 = 1
GStreck
B
B2
2
2
0
2
0
+1
-1
1
-1
aB2=1/4·(2·1+0·(-1)+2·1+0·(-1))=1/4·4 = 1
C2v
E
C2
xz
A1
A2
B1
B2
+1
+1
+1
+1
+1
+1
-1
-1
+1
-1
+1
-1
yz
+1
-1
-1
+1
h=4
Tz
Rz
Tx, Ry
Ty, Rx
A1
B1
GStreck= A1 + B1
Wasser: Schwingungsmoden
3n-6: 3.3-6= 3 Schwingungsmoden
2 Streckschwingungen: A1 + B1
1 Deformationsschwingung: A1
Symmetrierassen wichtig für Zuordnung
Charaktertafeln im Netz
http://www-theory.mpip-mainz.mpg.de/~gelessus/group.html
Charaktertafeln im Netz
reduziert aus....
IR & Raman-Aktivität
http://www-theory.mpip-mainz.mpg.de/~gelessus/group.html
Weiteres Beispiel - Ammoniak
rr11
N
r2 r3
H
H
rr23 H
q1 opposite
to r
q
1 gegenüber r11
to rr22
q22 opposite
gegenüber
q
gegenüber
q33 opposite
to rr33
Basis Valenzschwingung:
Dr1, Dr2, Dr3
Basis Deformationsschwingung: Dq1, Dq2, Dq3
C3v
GValenz
GDeform.
E
3
3
2C3
0
0
3
1
1
Ausreduzieren GValenz = A1 + E
GDeform. = A1 + E
(bereits früher Gvib = 2A1 + 2E)
Bestimmung von Gvib via G3N
N
H
H
H
C3v
E
unverschobene Atome
4
c/unverschobenes Atom 3
\ G3N
2C3
1
0
12
0
Ausreduzieren G3N = 3A1 + A2 + 4E
GT+R (Charaktertafel) = A1 + A2 + 2E
Gvib = 2A1 + 2E
3v
2
1
2
H
Methan, CH4
r1
9 Schwingungsmoden
6 Winkel q1,.....q6,
r4 C r2
H
r
3
H
H
q1 liegt zwischen r1 und r2 etc.
Basen für Valenzschwingungen: Dr1, Dr2, Dr3, Dr4
Basen für Deformationsschwingungen: Dq1, Dq2, Dq3, Dq4, Dq5, Dq6
Td
GValenz
GDeform.
E
4
6
8C3
1
0
3C2
6S4
0
0
2
0
2
Ausreduzieren GValenz = A1 + T2
GDeform, = A1 + E + T2
6d
2
2
4 Moden
6 Moden
0Moden eine zuviel ! vgl.: Gvib = A1 + E + 2T2
eine A1 Mode zuviel!
Problem mit Winkelbasis q1 - q6:
• eine der Koordinaten ist redundant.
• nicht alle 6 sind linear unabhängig
• die 6. te Koordinate ergibt sich aus den restlichen 5 Winkeln
A1-Deformationsschwingung würde bedeuten:
gleichzeitige Vergrößerung aller 6 Winkel!
physikalisch/geometrisch unmöglich
Regel/Tip: zuerst Gvib berechnen.
GDef = A1 + E + T2
PtCl42-
r1
Cl r4
Cl
Pt
Cl r3
D4h
E
GValenz 4
2C4
0
Basis: Dr1,Dr2, Dr3, Dr4.
r2 Cl
C2
0
2C2' 2C2" i 2S4
2
0
0
0
h 2v 2d
4
2
0
Ausreduzieren GValenz = A1g + B1g + Eu
2 Typen von Derformationsmoden:
in der Ebene:
aus der Ebene heraus:
q4
Cl
Cl Definition schwierig (vertagt auf später)
q3 Pt q1
q2
Cl
Cl
D4h
E
GDef(Ebene) 4
2C4
0
C2
0
2C2' 2C2" i 2S4
0
2
0 0
h 2v 2d
4
0
2
Ausreduzieren GDef(Ebene) = A1g + B2g + Eu
Ergebnis: Gvib = A1g + B1g + B2g + A2u + B2u + 2Eu
GValenz
= A1g + B1g + Eu
GDef(Ebene) = A1g + B2g + Eu
wieder eine A1g-Mode zuviel:
"out-of-plane" Deformationsmoden: Differenzbildung
Go.o.p.Def = Gvib - GValenz - GDef(Ebene) = A2u + B2u
bis jetzt erreicht: Anzahl & Symmetrierasse
als nächstes Auswahlregeln für IR/Raman
Spektroskopische Auswahlregeln
allgemeingültig: gelten z.B. auch für UV/VIS-Spektroskopie
Spektroskopie:
End-/ anregter Zustand
Anregung
Übergang
Grund-/Ausgangszustand
Auswahlregeln
• nicht alle Übergange sind erlaubt
• einige Übergänge sind verboten
Ob Übergange erlaubt oder verboten ist, hängt von den
Symmetrieeigenschaften,
d.h. irreduziblen Darstellungen der Grund und Anregungszustände ab:
Intensität des Übergangs I hängt vom Übergangsmoment ab:
I
Es gilt:
( YEPYAdt )2
P = OPERATOR - hängt von der Art der Spektroskopie ab (z.B.Dipolmoment)
YE = Wellenfunktion des Endzustandes
YA = Wellenfunktion des Ausgangzustandes
Operator P : hängt von der Art der Spektroskopie ab.
für IR und elektronische Übergänge (UV/VIS):
WW des Moleküls und der Strahlung via Dipolmoment
Operator = Dipolmoment
"Ideale Welt": Exakte Berechnung des Übergangsdipolmoments
nicht möglich
"Reale Welt": Bestimmung: I = 0 = verboten
I 0 = erlaubt
Ohne Herleitung:
P
d
t
E
A
ist = 0 (verboten) außer wenn das Produkt
EPA
die totalsymmetrische irreduzible Darstellung enthält.
(Nur Übergänge für die iPf totalsymmetisch sind, sind erlaubt)
Totalsymmetrische irreduzible Darstellung einer Punktgruppe
alle c's = +1
Was heißt das nun praktisch - wie macht man´s?
"Ganz einfach": Bestimmung der Symmetrie des Produkts
zweier Wellenfunktion und eines Operators P
Berechnung der DIREKTPRODUKTE (dazu gleich mehr)
IR-Spektroskopie: Operator P = Dipolmoment m
Symmetrie von m?
z
m
mz
mx
x
my
y
Zur Erinnerung: m =Vektor
Vektorzerlegung in x, y und z-Komponente
mmx + my + mz
x,y,z-Komponenten des Dipolmoments haben gleiche Symmetrie
wie Translationsvektoren Tx, Ty, Tz!
in Charaktertafel tabelliert s. unter Tx, Ty, Tz
C2v
E
C2
xz
A1
A2
B1
B2
+1
+1
+1
+1
+1
+1
-1
-1
+1
-1
+1
-1
yz
+1
-1
-1
+1
Tz
mz
Rz
Tx, Ry mx
Ty, Rx my
Symmetrie der Wellenfunktionen YA und YE?
IR: YA und YE sind Wellenfunktionen der Schwingungen
Symmetrie & Aussehen der Wellenfunktionen?
YA einfach! - alle Schwingungsgrundzustände sind totalsymmetrisch,
gehören zur totalsymmetrischen Darstellung (A1..)
YE - Symmetrie der Wellenfunktion entspricht der Symmetrie
der entsprechenden angeregten Schwingungsmode!
z.B: Schwingungsmode mit B2-Symmetrie besitzt entsprechende
Wellenfunktion mit B2-Symmetrie.
Beispiel!
Streckschwingungsbanden mit A1 and E Symmetrie von Ammoniak
IR-aktiv?
A1 Mode: YA A1;
E
A1
C3v
m (Charaktertafel) A1 + E
A1
A2
E
E
+1
+1
+2
2C3
+1
+1
-1
3v
+1
-1
0
Tz, z
Tx, Ty x, y
Direktprodukt : A1 x (A1 + E) x A1
für A1 (mz)
A1
A1
A1
+1
+1
+1
1·1·1
A1
+1
=
A1
+1
+1 YA
+1
+1
mz
+1
+1 YE
1·1·1 1·1·1
+1
+1
= IR-aktiv totalsymmetrisch!
E Mode: YA A1;
m
YE
C3v
E
A1 + E
A1
A2
E
Direktprodukt : A1 x (A1 + E) x E
für E1 (mx,y)
A1
E
E
+1
+2
+2
1·2·2
+4
E
+1
+1
+2
2C3
+1
+1
-1
3v
+1
-1
0
Tz, z
Tx, Ty x, y
+1
+1 YA
-1
0
mz
-1
0
YE
1·-1·-1 1·0·0
+1
Ausreduzieren
E
2C3
+4
+1
+1
A1 +1
1/6·(1·4·1 + 2·1·1 +
+0
1
3v
a p = c( R ) c p ( R )
h R
0
h=6
+1
3·0·1)= 1/6 (4+2) = 1
enthält 1x A1: totalsymmetrisch! = IR-aktiv!
Operator für Raman-Spektroskopie
IR: Dipoloperator – Raman ?
Ramaneffekt: physikalische Grundlage
• Wechselwirkung von Molekülen mit sichtbarem Licht
• sichtbares Licht = oszillierendes elektro-magnetisches Feld
• leichte Elektronen können Oszillation des E-Feldes folgen,
• sehr viel schwerere Kerne hingegen nicht.
Verschiebung negativer Ladung - positive Ladung bleibt liegen
INDUZIERTES DIPOLMOMENT
Induziertes Dipolmoment Raman-Schwingungsübergänge
IR: permanentes Dipolmoment
Größe des induzierten Dipolmoments abhängig davon wie leicht
sich die e--Wolke verzerren läßt
Polarisierbarkeit: Symbol a.
Polarisierbarkeit = TENSOR = 3 x 3 Matrix
vgl. Dipolmoment (3 x 1) Vektor
Polarsierbarkeitstensor
a xx a xy
a = a yx a yy
a zx a zy
9 Komponenten
a xz
a yz
a zz
Beachte: axy = ayx = symmetrische Matrix
Symmetrieeigenschaften der Komponenten?
axx gleiche Symmetrie wie x2; axy wie xy ..
Binärkombinationen ebenfalls in Charaktertafel tabelliert
Bestimmung Raman-aktiver Banden
analog zu IR-Banden
Verwendung der Symmetrieeigenschaften der Komponenten des
Polarisierbarkeitstensors (anstelle des Dipolmoments)
Auswahlregeln - Kurzfassung
(a) Jede Mode mit gleicher Symmetrieeigenschaft wie Tx, Ty or Tz
ist IR-aktiv.
(b) Jede Mode mit gleicher Symmetrieeigenschaft wie x2, y2, z2, xy
etc. ist Raman-aktiv.
Bestimmung der Moden:
r1
H
O r2
q
H
Wasser: 3 Moden
GValenz= A1 + B1
(IR: beide erlaubt)
GDef.= A1
(IR: erlaubt)
GDef., GValenz - "Aussehen der Moden ?"
Projektionsoperator
Projektionsoperator
C2
r1
O r2
H
xz
H
yz
C2v
E
C2
xz
yz
r1
r1
r2
r1
r2
A1
1·r1
1 ·r2
1 ·r1
A2
1 ·r1
1 ·r2
-1 ·r1
B1
1 ·r1
-1·r2
1 ·r1
Summe
1 ·r2 = 2r1 + 2r2
-1 ·r2 = r1 + r2- r1- r2
=0
-1 ·r2 = 2r1 - 2r2
GValenz= A1 + B1!
Projektionsoperator
Resultat: A1-Mode 2r1 + 2r2
B1-Mode 2r1 - 2r2
"heißt übersetzt" auf unser Koordinatensystem
r1
H
r1
O r2
H
A1-Mode
symmetrisch
H
O
O r2
H
B1-Mode
antisymmetrisch
H
H
analog
A1-Mode
"scissors"
Projektionsoperator - Ammoniak
2
3 C3
r3
r2
r3
r1
r1
r1
r2
r1
r3
r2
r1
r3
r2
Projektionsoperator - Ammoniak
C3v
E
C3
A1
A2
E
+1 r1 +1 r3
+1 r1 +1r3
+2 r1 -1 r3
C32
1
2
3
+1 r2 +1 r1 +1 r3 +1 r2
+1 r2 -1 r1 -1 r3 -1 r2
-1 r2 0 r1 0 r3 0 r2
2r1+2r2+2r3
0
2r1-r2-r3
E: nur eine Mode! zweite durch Verwendung einer anderen Basis
z.B. r2-r3 (steht senkrecht auf r2 und r3)
C3v
E
E
C3
C32
1
+2 (r2-r3) -1 (r2-r1) -1(r1-r3) 0 (...)
2
0 (...)
3
0 (...) = 3r2-3r3
Projektionsoperator - Ammoniak
q2
N
H
q3
q1
H
GDeform. = A1 + E
H
1. E
2. E
Projektionsoperator - Ammoniak
GValenz =
A1
r3
+
r2
N
H
H
GDeform. = A1
2 r1 - r2 - r3
E
H
H
q3
H
2 q1 + 2 q2 + 2 q 3
Regenschirm!
H
3 r2 - 3 r3
+
N
H
H
H
r1
H
H
r2
N
r3
H
r1
H
2 r1 + 2 r 2 + 2 r3
r2
N
r3
H
r1
E
H
q3
q2
N
q1
H
2 q1 - q2 - q3
H
q2
N
q1
3 q2 - 3 q3
H
Auswahlregeln UV/VIS-Spektroskopie
H
H
Ethen: -*Übergang erlaubt?
H
H
* LUMO
hn
HOMO
zunächst Punktgruppe bestimmen
Symmetrieoperationen
C2(x)
xz
yz
xy
3 Spiegelebenen
C2(z)
i
i, 3 C2-Achsen
C2(y)
H
H
H
ja
Dh
Molekül
F
l
u
H
ja linear? nein
ß
d
i?
ja 2 oder mehr nein
i
Cn, n > 2 ?
a
nein
g
ja
r
i?
Flußdiagramm 2 a
ja
m
C5 ? nein
m
1
Cv
Ih
Oh
Td
lineare Gruppen
z.B
C60
kubische Gruppen
H
H
von Flußdiagramm 1
Cn? N
H
J
H
J ?N
h
J ? N
J n C2´s ^Cn ?
n2
N
?J
D2h
J i?N
h
N
n d ?
J
N
n v ?
N
J
S2n ?
N
Dnh
Dnd
Dn
Cn
S2n
Cnv Cnh
Cs
Ci
C1
F
l
u
ß
d
i
a
g
r
a
m
m
2
H
H
von Flußdiagramm 1
Cn? N
H
J
H
J ?N
h
J ? N
J n C2´s ^Cn ?
n2
N
?J
D2h
J i?N
h
N
n d ?
J
N
n v ?
N
J
S2n ?
N
D2h
Dnd
Dn
Cn
S2n
Cnv Cnh
Cs
Ci
C1
F
l
u
ß
d
i
a
g
r
a
m
m
2
Symmetrierassen
*
i
1
g
B2g
C2(z) C2(y)
-1
-1
B3u
C2(x)
i
-1
C2(z) C2(y)
-1
-1
xz
C2(z)
u
i
C2(y)
xy
Bande erlaubt?
*
B2g
B3u
1
1
-1
-1
B2g.B3u
1·1
1
1
-1
-1
1
1
-1
-1·-1
1·-1
-1·1
1·-1
1
-1
-1
-1
B1u
-1
1
-1·1
-1
1
1
-1
-1
1·1 -1·-1
1
1
I ~ ( *m dt )
2
B2gmB3u
B1uB1u = Ag!
mz
!
I 0 ! erlaubt
3