Continuous System Modeling
Werbung

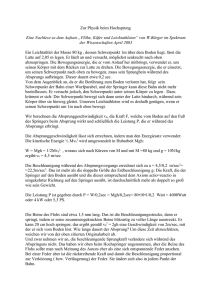
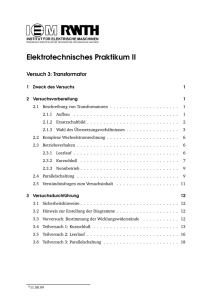
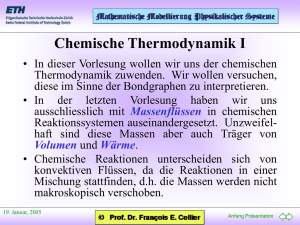
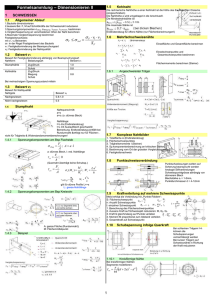
Die theoretischen Grundlagen der Bondgraphen-Methodik • In dieser Vorlesung wollen wir uns die theoretische Untermauerung der Bondgraphen-Methodik etwas genauer ansehen. Insbesondere befassen wir uns mit den vier Basisvariabeln sowie mit den Eigenschaften kapazitiver und induktiver Speicherelemente, und schliesslich erörtern wir das Dualitätsprinzip der Bondgraphen. • Ebenfalls werden wir die zwei Typen von Energieumformern, den Transformator und den Gyrator, einführen und die Bondgraphen-Methodik auf hydraulische Anwendungen erweitern. 24. November, 2004 Anfang Präsentation Table of Contents • • • • • • • 24. November, 2004 Die vier Basisvariabeln der Bondgraphen-Methodik Eigenschaften der Speicherelemente Hydraulische Bondgraphen Energieumwandlung Elektromechanische Systeme Das Dualitätsprinzip der Bondgraphen Die Diamantenregel Anfang Präsentation Die vier Basisvariablen der Bondgraphenmethodik • Neben den beiden adjugierten Variablen e und f, gibt es zwei weitere physikalische Grössen, die bei Bondgraphen eine Rolle spielen: Verallgemeinertes Moment: p = e · dt Verallgemeinerte Position: q = f · dt 24. November, 2004 Anfang Präsentation Relationen zwischen den Basisvariablen Widerstand: e = R( f ) p q Kapazität: e I C R f Es kann ausser 24. November, 2004 q = C( e ) Induktivität: p = I( f ) Beliebig nichtlineare Funktionen im 1. und 3. Quadranten C und I keine weiteren Speicher geben. Anfang Präsentation Nichtlineare Kapazität Hier muss die Kapazitätsgleichung eingesetzt werden. 24. November, 2004 Anfang Präsentation Lineare Speicher Allgemeine Kapazitätsgleichung: q = C( e ) Lineare Kapazitätsgleichung: q = C·e Lineare Kapazitätsgleichung abgeleitet: f = C · de dt „Normale“ Kapazitätsgleichung, wie bisher angetroffen. 24. November, 2004 Anfang Präsentation Einsatz Verallgemeinertes Moment Fluss e f Verallgemeinerte Verschiebung p q Elektrische Schaltungen Spannung u (V) Strom i (A) Magn. Fluss (V·sec) Ladung q (A·sec) Translationssysteme Kraft F (N) Geschwindigkeit v (m / sec) Kraftmoment M (N·sec) Verschiebung x (m) Rotationssysteme Drehmoment T (N·m) Winkelgeschw. (rad / sec) Torsion T (N·m·sec) Winkel (rad) Hydraulische Systeme Druck p (N / m2) Volumenfluss q (m3 / sec) Druckmoment Γ (N·sec / m2) Volumen V (m3) Chemische Systeme Chem. Potential (J / mol) Molarer Fluss (mol/sec) - Anzahl Mole n (mol) Thermodynamiksysteme Temperatur T (K) Entropiefluss S’ (W / K) - Entropie S (J / K ) 24. November, 2004 Anfang Präsentation Hydraulische Bondgraphen I • In der Hydraulik sind die beiden adjugierten Variablen der Druck p und der Volumenfluss q. Dabei wird der Druck als Einsatzvariable (Potential) betrachtet, während der Volumenfluss die Rolle der Flussvariable übernimmt. Phydr = p · q [W] = [N/ m2] · [m3 / s] = kg · m -1 · s-2] · [m3 · s-1] = [kg · m2 · s-3] • Der kapazitive Speicher beschreibt die Kompression der Flüssigkeit als Funktion des Drucks, während der induktive Speicher die Trägheit der bewegten Flüssigkeit modelliert. 24. November, 2004 Anfang Präsentation Hydraulische Bondgraphen II Kompression: qein p dp dt = c · ( qein – qaus ) qaus Laminare Strömung: q p2 p1 q = k · Dp = k · ( p1 – p2 ) Turbulente Strömung: q p1 24. November, 2004 p2 q = k · sign(Dp) · |Dp| p C : 1/c Dq Dp q Dp q R : 1/k Hydro G :k Anfang Präsentation Energieumwandlung • Neben den bisher betrachteten Elementen zur Energiespeicherung ( C und I ) sowie Dissipation (Umwandlung in Wärme) ( R ) werden noch zwei weitere Elemente benötigt, welche allgemeine Energiewandler beschreiben, den Transformator und den Gyrator. • Während Widerstände die irreversible Umwandlung freier Energie in Wärme beschreiben, werden Transformatoren und Gyratoren verwendet, um reversible Energieumwandlungsvorgänge zwischen gleichartigen oder verschiedenartigen Energieformen zu beschreiben. 24. November, 2004 Anfang Präsentation Transformatoren e1 f1 TF m e2 f2 Übersetzung: e1 = m · e2 (1) Energieerhaltung: e1 · f1 = e2 · f2 (2) (m ·e2 ) · f1 = e2 · f2 (3) f2 = m · f1 Der Transformator kann entweder durch Gleichungen (1) und (2) oder durch Gleichungen (1) und (4) beschrieben werden. 24. November, 2004 Anfang Präsentation (4) Die Kausalisierung des Transformators e1 f1 e1 f1 TF m e2 f2 e1 = m · e2 f2 = m · f1 TF m e2 f2 e2 = e1 / m f 1 = f2 / m Da wir genau eine Gleichung für den Einsatz und eine für den Fluss haben, müssen beim Transformator ein Einsatz und ein Fluss berechnet werden. 24. November, 2004 Anfang Präsentation Beispiele von Transformatoren m = 1/M Elektrischer Transformator (bei Wechselstrom im eingeschwungenen Zustand) 24. November, 2004 m = r1 /r2 Mechanisches Getriebe m=A Hydraulischer Stossdämpfer Anfang Präsentation Gyratoren e1 f1 GY r e2 f2 Übersetzung: e1 = r · f2 (1) Energieerhaltung: e1 · f1 = e2 · f2 (2) (r ·f2 ) · f1 = e2 · f2 (3) e2 = r · f1 Der Gyrator kann entweder durch Gleichungen (1) und (2) oder durch Gleichungen (1) und (4) beschrieben werden. 24. November, 2004 Anfang Präsentation (4) Die Kausalisierung des Gyrators e1 f1 e1 f1 GY r e2 f2 e1 = r · f2 e2 = r · f1 GY r e2 f2 f2 = e1 / r f1 = e2 / r Da wir eine Gleichung links, die andere rechts vom Gyrator rechnen müssen, können wir die Gleichungen entweder nach den beiden Einsatzvariablen oder aber nach den beiden Flussgrössen auflösen. 24. November, 2004 Anfang Präsentation Beispiel eines Gyrators r= Beim Gleichstrommotor ist das Drehmoment tm proportional zum Ankerstrom ia , während sich die induzierte Spannung ui proportional zur Winkelgeschwindigkeit m verhält. 24. November, 2004 Anfang Präsentation Beispiel eines elektromechanischen Systems Kausalitätskonflikt (verursacht durch das Getriebe) 24. November, 2004 Anfang Präsentation Das Dualitätsprinzip • Es ist möglich, jeden Bondgraphen zu „dualisieren“, indem die Definitionen der Einsatz- und Flussgrössen vertauscht werden. • Beim Dualisieren werden Einsatzquellen zu Flussquellen, Kapazitäten zu Induktivitäten, Widerstände zu Leitwerten, und umgekehrt. • Bei den Transformatoren und Gyratoren wird der Wert der Übersetzung invertiert. • Die beiden Verzweigungen vertauschen ihren Typus. • Alle Kausalitätsstriche wandern ans jeweils andere Ende jedes Bonds. 24. November, 2004 Anfang Präsentation 1. Beispiel Die beiden Bondgraphen liefern identische Simulationsresultate. 24. November, 2004 Anfang Präsentation 2. Beispiel 24. November, 2004 Anfang Präsentation Partielle Dualisierung • Es ist immer möglich, Bondgraphen partiell zu dualisieren. Bei den Transformatoren und Gyratoren ist die partielle Dualisierung besonders einfach zu bewerkstelligen. Die beiden Wandler tauschen dabei ihren Typ. So mag es z.B. sinnvoll sein, nur die mechanische Seite zu dualisieren, während die elektrische Seite in der Originalkausalität belassen wird. Es kann aber auch bei jedem einzelnen Bond partiell dualisiert werden. Dabei wird der „verdrehte“ Bond zu einem Gyrator mit der Übersetzung r=1. Ein solcher Gyrator wird in der Literatur als symplektischer Gyrator bezeichnet. 24. November, 2004 Anfang Präsentation Umformung von Bondgraphen • Jedes physikalische System mit konzentrierten Parametern kann durch einen Bondgraphen beschrieben werden. • Die Bondgraphendarstellung ist aber nicht eindeutig, d.h. mehrere verschiedene Bondgraphen können identische Gleichungssysteme repräsentieren. • Eine Mehrdeutigkeit haben wir bereits kennen gelernt: die Dualisierung. • Es gibt aber auch Mehrdeutigkeiten, die nicht auf Dualisierung zurückzuführen sind. 24. November, 2004 Anfang Präsentation Die Diamantenregel k12 B1 Diamant m1 m2 B12 C:1/k12 R:B1 Fk12 v12 FB1 v1 v1 1 v1 Fm1 I:m1 0 R:B2 v2FB2 v2 Fk12 Fk12 v2 v1 FB12 0 24. November, 2004 v2 Fm2 FB12 v12 FB12 R:B12 1 I:m2 v2 SE:F F F effizienter B2 R:B1 R:B2 FB1 v1 FB2 v2 v2 v2 v1 1 F +F 0 Fk12 +FB12 1 F SE:F k12 B12 v12 Fk12 +FB12 v2 Fm2 v1 Fm1 I:m1 v12 I:m2 1 FB12 v Fk12 12 C:1/k12 R:B12 Unterschiedliche Variablen Anfang Präsentation Referenzen • Cellier, F.E. (1991), Continuous System Modeling, Springer-Verlag, New York, Chapter 7. 24. November, 2004 Anfang Präsentation