1.5 Relativistische Kinematik
Werbung

1.5 Relativistische Kinematik
1.5.1 Lorentz-Transformation
Grundlage: Spezielle Relativitätstheorie
à In jedem Inertialsystem gelten die gleichen physikalischen Gesetze;
Inertialsystem: System in dem das 1. Newtonsche Gesetz (Trägheitsgesetz) gilt
Betrachte zwei Inertialsysteme S und S´, die sich mit konstanter Geschwindigkeit v
zueinander bewegen (o.b.d.A: Bewegung in x-Richtung)
Übergang zwischen Bezugssystemen wird durch die Lorentz-Transformation
beschrieben:
Inverse Transformation:
x ʹ′ = γ ⋅ (x − v ⋅ t)
yʹ′ = y
zʹ′ = z
v
t ʹ′ = γ (t − 2 ⋅ x)
c
x = γ ⋅ (x ʹ′ + v ⋅ t ʹ′)
y = yʹ′
wobei:
γ :=
1
⎛ v ⎞
1 − ⎜ ⎟
⎝ c ⎠
2
z = zʹ′
t = γ (t ʹ′ +
v
⋅ x ʹ′)
2
c
Konsequenzen aus der Lorentz-Transformation
(i) Relativität der Gleichzeitigkeit
(ii) Längenkontraktion
(iii) Zeitdilatation
(iv) Nicht-lineare Addition von Geschwindigkeiten
(i) Relativität der Gleichzeitigkeit
• Gleichzeitigkeit hängt von der Bewegung der Bezugssysteme ab;
• Ereignisse, die in einem Bezugssystem gleichzeitig stattfinden, sind im
anderen Bezugssystem nicht gleichzeitig
• Zwei gleichzeitige Ereignisse in S:
t, xA, y, z
t, xB, y, z
• Für die Zeiten t‘ für die Ereignisse A und B ergibt sich im System S‘:
v
⋅ xA )
2
c
v
t ʹ′B = γ ⋅ (t − 2 ⋅ x B )
c
t ʹ′A = γ ⋅ (t −
• Hieraus ergibt sich:
v
t ʹ′A = t ʹ′B + γ ⋅ 2 ⋅ (x B − x A )
c
(ii) Längenkontraktion
• Betrachte einen Stab der Länge L´ im System S´
(Das System S´ sei das Ruhesystem des Stabes)
• L´ = x2´- x1´
• Betrachte die Koordinaten, und damit die Länge des Stabes im System S:
x ʹ′ = γ ⋅ (x − v ⋅ t)
⇒ x1ʹ′ = γx1 − γv ⋅ t
x ʹ′2 = γx 2 − γv ⋅ t
• Hieraus ergibt sich
x ʹ′2 x1ʹ′ 1
Lʹ′
L = x 2 − x1 =
− = (x ʹ′2 − x1ʹ′ ) =
γ
γ γ
γ
à Das bewegte Objekt erscheint um einen Faktor γ in der Länge verkürzt,
bezogen auf das Ruhesystem des Objekts
(iii)
Zeitdilatation
• Eine Uhr in dem bewegten System laufe für einen Zeitraum T´;
Welches Zeitintervall ergibt die Messung im System S?
• o.B.d.A:
t1´= 0 bis t2´= T´
Δt´= T´
Uhr sei im Ursprung von S´, d.h. x´= 0
• Lorentztransformation:
t = !( t" +
v
x")
2
c
v
# 0) = 0
c2
v
! t 2 = " # (T$ + 2 # 0) = " # T$
c
! t1 = " # (0 +
⇒ Δt = t 2 − t1 = γ ⋅ Tʹ′
à Die Uhr im System S durchläuft ein um den Faktor γ längeres Zeitintervall,
oder: „bewegte Uhren gehen langsamer“
Wichtig für die Teilchenphysik: Zeitdilatation relativistischer Teilchen
(iv)
Nicht-lineare Addition von Geschwindigkeiten
• Ein Teilchen bewege sich mit der Geschwindigkeit u´ relativ zu S´ in x´-Richtung;
Welche Geschwindigkeit u hat es im Bezugssystem S?
!x# + v
!x
"(!x# + v $ !t#)
!t#
=u=
=
!t
"(!t# + v 2 $ !x#) 1+ v $ !x#
c
c 2 !t#
u ʹ′ + v
⇒ u=
v ⋅ u ʹ′
1+ 2
c
• Spezialfälle:
klassisch:
u = u! + v
relativistische
Korrektur:
k :=
u! = c
v=c
u! = c
" u=
$&
%
&'
c+v
1+ v c
1
1+ v"c2u!
1+ v c
= c # 1+ v = c
c
2
" u = c# = c
2
à Die Lichtgeschwindigkeit stellt in allen Inertialsystemen die maximale
Geschwindigkeit dar.
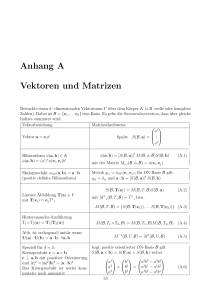
1.5.2 Vierervektoren
(i) Orts- und Zeit-Vektor:
Die Lorentz-Transformation koppelt Orts- und Zeitkoordinaten, Zusammenfassung
der vier Koordinaten in einen Raum-Zeit-Vektor:
x0 = c ⋅ t
x1 = x
⎛ c ⋅ t ⎞
⎜ ⎟
x
µ
x := ⎜ ⎟
⎜ y ⎟
⎜ ⎟
⎝ z ⎠
x2 = y
x3 = z
Transformation:
Explizite Rechnung für x0´
x 0ʹ′ = (c ⋅ t ʹ′) = c ⋅ γ ⋅ (t − cv2 x1 )
x 0! = "(x 0 # $ % x1 )
= γ ⋅ (c ⋅ t − vc ⋅ x1 )
v
wobei $ :=
c
x1! = "(x1 # $ % x 0 )
x 2! = x 2
x 3! = x 3
= γ ⋅ (x 0 − β ⋅ x1 )
Kompakte Schreibweise:
(Einstein’sche Summenkonvention)
wobei:
3
x = %" $ x = " $ x
µ!
µ
#
#=0
#
µ
#
#
(µ = 0,1,2,3)
−γβ 0 0 ⎞
⎛ γ
⎜
⎟
−γβ
γ
0
0
⎟
Λ = ⎜
⎜ 0
0 1 0 ⎟
⎜
⎟
0
0
0
1
⎝
⎠
• Vierervektor aµ : Vier-komponentiges Objekt, das sich in derselben Weise
wie xµ transformiert
a =Λ a
µʹ′
µ ν
ν
wobei Λ die Lorentz-Transformationsmatrix darstellt
• Skalarprodukt von Vierervektoren:
0 0
1 1
2
2
3 3
a ⋅ bµ = a b − a b − a b − a b
µ
• Beträge von Vierervektoren:
! !
! a"b = a b #a"b
0 0
! !
a 2 := a ! a = (a 0 ) 2 " a ! a
a2 > 0
aµ
zeitartig
a2 < 0
aµ
raumartig
a2 = 0
aµ
lichtartig
• Lorentz-Invarianten: Kombinationen von Koordinaten, die invariant unter
Lorentz-Transformationen sind
Beispiel:
I = (x 0 ) 2 − (x1 ) 2 − (x 2 ) 2 − (x 3 ) 2
= (x 0ʹ′ ) 2 − (x1ʹ′ ) 2 − (x 2ʹ′ ) 2 − (x 3ʹ′ ) 2
Metrik:
⎛ 1 0 0 0 ⎞
⎜
⎟
0
−
1
0
0
⎟
g := ⎜
⎜ 0 0 −1 0 ⎟
⎜
⎟
0
0
0
−
1
⎝
⎠
(Analog zur Invarianz von r2 = x2 + y2 + z2
im 3-dimensionalen Raum unter Rotationen)
3
⇒ I = ∑∑ g µν x µ x ν = g µν x µ x ν
µ= 0 v = 0
= xν ⋅ xν
wobei
kontravariant: (x 0 , x1 , x 2 , x 3 )
kovariant:
(x 0 , − x1 , − x 2 , − x 3 )
3
x µ := g µν x ν
kovarianter Vektor
Übergang: kovariant ß à kontravariant
x µ = g µν ⋅ x ν
x µ = g µν ⋅ x ν
g µν = (G) −1 = g µν
(Diagonalform)
1.5.3 Tensoren
• Verallgemeinerung von Vierervektoren
• Ein Tensor n-ter Stufe
Sµν ...τ
(n Indices) transformiert sich mit n Λ-Matrizen
Tensor 0. Stufe: Skalar
Tensor 1. Stufe: Vierervektor
Tensor 2. Stufe: 16-komponentiges Objekt Sµν
Transformation: Sµν ' = Λ µk ⋅ Λ νσ ⋅ Skσ
Tensor 3. Stufe: 64-komponentiges Objekt Tµνλ
Transformation:
T µνλ ' = Λ µk ⋅ Λ νσ ⋅ Λ λτ ⋅ T kστ
• Konstruktion von kovarianten und gemischten Tensoren:
Sµν := g νλ ⋅ Sµλ
Sµν := g µk ⋅ g νλ ⋅ Skλ
(Das Produkt zweier Tensoren ist wieder ein Tensor)
1.5.4 Energie-Impuls Vektor
• Die relativistische Energie und der Dreierimpuls bilden einen Vierervektor
! E
# c
# p
x
µ
P =#
# py
#
# p
" z
$
&
& ! '( m(c
&=#
!
& #" ' ( m ( v
&
&
%
$
&
&
%
• Relativistische Invariante:
Pµ ! P =
µ
E2
c2
!2 2 2 2 2 2!2
"p =# m c "# m v
= # 2 m 2c 2 (1" vc2 )
2
= # 2 m 2c 2 #12 = m 2c 2
è
E 2 = m 2c 4 + p 2c 2
• Energie-Term:
E = γ ⋅ mc 2 = mc 2
• Näherung für kleine Werte von v/c:
1
1 − ( vc ) 2
2
E = mc {1 +
1 v2
2 c2
+
3 v4
8 c4
+…}
= mc 2 + 12 mv 2 + 83 vc2 +…
4
• Relativistische Energie/Impulsbeziehungen:
E
γ=
mc 2
E = ! " m " c2
v p"c
!= =
c
E
Beispiel: Proton E = 10 GeV
!
!
p = !" m" v
γ=
10 GeV
= 10.66
0.938GeV
102 − 0.9382
β=
= 0.996
10