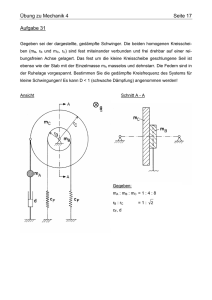
NEWTONs Axiomatik
Werbung

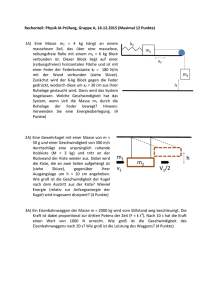
Baudynamik und Zustandsanalyse Eine Einführung in die Baudynamik mit Mathematica ® Das vorliegende Skript wurde im Original mit dem Programmsystem MATHEMATICA® von WOLFRAM-Research [http://www.wolfram.com] geschrieben und erstmals auf den Webseiten der Hochschule für Technik und Wirtschaft in Dresden (University of Applied Sciences) [http://www.htw-dresden.de] veröffentlicht. Die Schrift trägt den Charakter eines Arbeitskonzepts, so dass ich für Hinweise und Anregungen aller Art, einschließlich zu Rechtschreibung, Grammatik und Druckbild sehr dankbar bin. Mit meinem Beitrag erhebe ich keinen Anspruch auf irgendeine Vollständigkeit bzw. Allgemeingültigkeit.Ich möchte einzig und allein an exemplarischen Problemstellungen der Baumechanik logisch einfache mathematisch-physikalische Lösungsmethoden zur Diskussion stellen. Mirko Slavik, Dresden ◼ 5 NEWTONsche Mechanik ◻ 5.1 NEWTONsche Axiomatik 5.1.1 Unsere heutigen Ideen über die Bewegung der Körper datieren auf Galileo GALILEI (1564 1642) und Isaac NEWTON (1643 - 1727). GALILEIs Messungen beim Abrollen einer Kugel auf einer geneigten Ebene wurden von NEWTON als Basis seiner Bewegungsgesetze verwendet. Diese Gesetze und Prinzipien sind später von Jean d’ALEMBERT (1717 - 1783), Joseph de LAGRANGE (1736 - 1813) und William HAMILTON (1805 - 1865) in modifizierte mathematische Formen transformiert und weiterentwickelt worden (vgl. hierzu auch den Abschnitt 2.6). 5.1.2 NEWTONs Mechanik galt in der Physik bis zur Formulierung der Relativitätstheorie im Jahre 1905 durch Albert EINSTEIN (1879 - 1955) als allgemeingültig. Solange die Geschwindigkeiten sehr klein gegenüber der Lichtgeschwindigkeit bleiben, kann sie in den Ingenieurwissenschaften jedoch nach wie vor uneingeschränkt angewendet werden (siehe Abschnitt 2.7). 5.1.3 Die Grundgrößenarten der Mechanik sind die Zeit, die Länge und die Masse. In der NEWTON schen Axiomatik stellen diese Grundgrößenarten ein absolutes Konzept dar. Sie werden als voneinander unabhängig angesehen. Dies gilt nicht in der relativistischen Mechanik, wo Zeit und Länge mit dem Standort eines Betrachters und die Masse mit der Geschwindigkeit verknüpft sind. 5.1.4 Die maßgebende Wechselwirkungsgröße zur Beschreibung der Bewegung von Körpern ist die Kraft. Sie repräsentiert die Wirkung eines Körpers auf einen anderen. Sie wird durch ihren Angriffspunkt, ihre Wirkungsrichtung und ihren Betrag charakterisiert. Das bedeutet, eine Kraft kann mathema tisch als Vektor beschrieben werden. 5.1.5 Um ein Ereignis zu erfassen, ist es nicht ausreichend nur die Position eines Körpers im Raum zu identifizieren. Es muss auch der zugehörige Zeitpunkt angegeben werden. 5.1.6 Das Konzept der Masse dient der Charakteristik und der Vergleichbarkeit von Körpern auf der Basis bestimmter fundamentaler Experimente. Die Masse ist das Maß der Trägheit eines Körpers, seines Widerstandes gegenüber einer Beschleunigung (vgl. hierzu auch den Unterabschnitt 2.7.3). 5.1.7 In den Absätzen 5.1.8 bis 5.1.13 werden sechs fundamentale Prinzipien, die alle auf experimentellen Erfahrungen beruhen, angeführt. 5.1.8 Gemäß NEWTONs erstem Gesetz (Axiom) bleibt eine Punktmasse in Ruhe oder in gleichförmiger geradliniger Bewegung solange die Resultierende aller auf die Punktmasse wirkenden Kräfte gleich null ist (Trägheitsprinzip). 5.1.9 Wenn jedoch laut NEWTONs zweitem Gesetz (Axiom) die Resultierende aller Kräfte nicht null ist, dann erfährt die Punktmasse eine Beschleunigung, die proportional zum Betrag der Resultierenden 2 baudyn_05_newton.nb ist und in deren Wirkungsrichtung weist. Dieses Gesetz, das auch als Aktionsprinzip bekannt ist, lautet mathematisch: F= ma mit F m - Resultierende oder Trägheitskraft in [N] , - Masse des Punktes (Punktmasse oder Massepunkt) in [kg], a - Beschleunigung des Massepunktes in [m s 2]. 5.1.10 NEWTONs drittes Gesetz (Axiom) besagt, dass die resultierende Aktions- und Reaktionskraft zwischen Körpern, die miteinander in Kontakt stehen, dieselbe Amplitude, dieselbe Wirkungslinie, jedoch die entgegengesetzte Wirkungsrichtung besitzen (Wechselwirkungsprinzip). 5.1.11 NEWTONs Gravitationsgesetz stellt eine Beziehung zwischen zwei beliebigen Massekörpern her. Diese werden durch zwei betragsmäßig gleichgroße Kräfte auf einer gemeinsamen Wirkungslinie gegenseitig angezogen. Die Gleichung hierzu besitzt die Form: Fgrav = - γ mit Fgrav m1 m2 r2 - Gravitationskraft zwischen zwei Massen, m 1, 2 - Massen in [kg], r - Abstand der Punktmassen in [m] , γ - Gravitationskonstante; sie lautet γ = (6,6720 ± 0,0041) × 10 -11[m3kg -1 s -2]. 5.1.12 Zwei Kräfte, die an einem Massekörper angreifen, können durch eine einzige Kraft, die Resultierende ersetzt werden. Zeichnerisch entspricht diese Kraft der Diagonalen eines Parallelogramms, dessen Seiten den gegebenen beiden Kräften äquivalent sind. Dieser Zusammenhang bildet den Ausgangspunkt der Addition beliebig vieler Einzelkräfte. 5.1.13 Solange die Verschiebung einer Kraft entlang ihrer Wirkungslinie erfolgt, ihr Betrag und ihre Richtung jedoch gleich bleiben, ist die Wirkung, die sie auf einen Massekörper ausübt, unverändert. 5.1.14 Wenn auf eine Punktmasse m ein Kraftvektor F einwirkt, kann NEWTONs zweites Gesetz (Absatz 5.1.9) mittels dem Geschwindigkeitsvektor v(t) auch in einer anderen Form ausgedrückt werden: F[t] = ∂t (m v[t]) Anmerkung: Die Zweckmäßigkeit Kräfte und Geschwindigkeiten mittels Vektoren zu beschreiben erschließt sich, wenn man basierend auf einer ausreichenden Kenntnis der skalaren Mechanik (siehe Abschnitt 5.2 f.) sich in die Symbolik der Vektorkinematik anhand numerischer Beispiele “hineindenkt”. Hierzu sei insbesondere auch auf den Abschnitt 2.6 und auf die versteckte Zelle im Anschluss an den Absatz 5.2.3 verwiesen. Im vorliegenden Abschnitt 5.1 haben wir auf eine gesonderte vektorielle Schreibweise verzichtet. 5.1.15 Das Produkt p = m v stellt den Impuls der Punktmasse m dar. Multiplizieren wir in der obigen Gleichung beide Seiten mit dt und integrieren von t 1 nach t2 , erhält man den Kraftstoß, der gleich der Impulsänderung ist. Das Ganze wird als Impulssatz bezeichnet: 3 baudyn_05_newton.nb t2 t1 ∂t (m v[t]) ⅆ t = m v2 - m v1 = t2 F[t] ⅆ t t1 5.1.16 Der Impulsvektor p = m v eines Massepunktes m ist folglich gleich dem Kraftstoß, der einen ruhenden Massepunkt m auf eine Endgeschwindigkeit v ≢ 0 bringt. Anmerkung: In der deutschen Fachsprache ist die Verwendung des Begriffes “Impuls” nicht einheitlich und somit leider auch hin und wieder irreführend. Für das Produkt (5.1.15) wäre der Terminus “Bewegungsgröße” (engl. “momentum”) geeigneter [28]. Im Englischen wird mit dem Wort “impulse” der “Kraftstoß” bezeichnet. Eine ähnliche unglückliche Begriffswahl im Deutschen kennen wir in der Festigkeitslehre mit dem Begriff des “Widerstandsmomentes” (siehe [58, Abschnitt 18.26]), wo die englisch-amerikanischen Fachbegriffe in ihrer semantischen Zuordnung logischer sind. ◻ 5.2 Grundaussagen zur Kinematik und Kinetik von Punkten, Massepunkten und Körpern [66] 5.2.1 Die Berechnung der Geschwindigkeit und der Beschleunigung von mechanischen Gebilden, die der Einwirkung NEWTONscher Kräfte ausgesetzt sind, ist Gegenstand des Lehrgebietes der Kinetik. Hingegen widmet man sich in der Kinematik allein der funktionellen Zuordnung der Bewegungsgrößen Zeit, Ort, Geschwindigkeit und Beschleunigung verschiedener idealisierter Objekte, wie Punkte, Scheiben und Körper (vgl. hierzu die Berechnungsmodelle der Festigkeitslehre in [58]). 5.2.2 In der Kinematik unterscheidet man bahngeführte von nichtgeführten sowie gleichförmige von ungleichförmigen Bewegungen. Die gleichförmigen Vorgänge sind beschleunigungsfrei, bei ihnen ist die Bahngeschwindigkeit zeitlich konstant. Eine Beschleunigung verursacht eine ungleichförmige Bewegung. Ist diese konstant, liegt der Sonderfall einer gleichförmig beschleunigten Bewegung vor. 5.2.3 Die skalare Kinematik ist auf die Analyse von Bewegungen entlang einer einzigen Koordinate beschränkt. Liegen beliebige, allgemeine translatorische und rotatorische Bewegungen im Raum vor, erweist sich die Einführung eines zeitabhängigen Ortsvektors als zwingend. Die Behandlung derartiger Vorgänge erfolgt im Rahmen der Vektorkinematik (siehe unten sowie Absatz 5.2.7). ☺ Versteckte Zelle zur Einführung in die Vektorkinematik mit MATHEMATICA ® . 5.2.4 Wir schließen an die fundamentale Definition der Geschwindigkeit v(t) = Limit [ Δs Δt , Δt → 0 ] eines Punktes bzw. einer Punktmasse aus dem Absatz 3.7 an. Eine Geschwindigkeitsänderung Δv bezogen auf eine Zeitdifferenz Δt führt uns auf die Definition der Beschleunigung a(t) (vgl. Absatz 5.1.9). Hierbei muss beachtet werden, dass der Geschwindigkeitsvektor entweder infolge einer Änderung seines Betrages oder einer Änderung seiner Richtung beeinflusst werden kann. Die Betragsänderung bewirkt eine Bahnbeschleunigung. Sie ist tangential zur Bewegungsbahn gerichtet (vgl. Absatz 5.1.9), weshalb man auch von einer Tangentialbeschleunigung spricht. Hingegen ist eine Richtungsänderung Ergebnis einer Normalbeschleunigung in Richtung Krümmungsmittelpunkt der erzwungenen Bahnkurve. Man spricht auch von einer geführten Bewegung. Es gilt: 4 baudyn_05_newton.nb a[t] = Limit Δv Δt , Δt → 0 = ∂t v[t] = ∂t,t s[t] mit den Komponenten at [t] = ∂t v[t] an [t] = v[t] - Bahn -, bzw. Tangentialbeschleunigung 2 - Normalbeschleunigung R mit dem Krümmungsradius R 5.2.5 Dem Problem der geführten Bewegung kann man sich auch anders nähern. Damit eine Punktmasse sich beispielsweise mit einer konstanten Geschwindigkeit v auf einer Kreisbahn bewegt, muss sie eine konstante Beschleunigung erfahren, die stets zum Bewegungszentrum, dem Kreismittelpunkt gerichtet ist. Deshalb nennt man die Normalbeschleunigung auch Zentralbeschleunigung. Wir verdeutlichen uns den mathematisch-physikalischen Hintergrund anhand des Bildes 5.2.5. Für eine sehr kleine Zeitspanne Δt ⪡ 1 kann die Bogenlänge der Sekantenlänge gleich gesetzt werden, also b ≏ s = v Δt . Da in Richtung Bewegungszentrum eine gleichförmig beschleunigte Translation mit a = const. vorliegt, beträgt die Teilstrecke q = ∫∫ a ⅆ Δt ⅆ Δt = a Δt 2 2 (vgl. Absatz 5.2.7). Laut dem Kathetensatz und dem Satz des THALES von MILET (um 625 v. Chr. - um 547 v. Chr.) folgt schließlich: b2 = (p + q) q ⟶ (v Δt)2 = 2 R a Δt2 2 ⟶ a = v2 R w.z.b.w. Bild 5.2.5: Geometrische Zusammenhänge zur Erläuterung der Zentralbeschleunigung 5.2.6 Arbeitet man mit den üblichen infinitesimalen Größen, dann besteht zwischen dem Mittelpunktswinkel dφ, der Bogenlänge ds und dem Abstand R zum Drehzentrum die Relation ds = R dφ (siehe Bild 5.2.6). Somit lauten die noch fehlenden Basisbeziehungen der Rotationsbewegung: 5 baudyn_05_newton.nb ds dt dv dt = dφ dt R ⟶ v = ωR mit der Winkelgeschwindigkeit ≏ at = R ∂t ω = R ∂t,t φ ≏ R α an = v2 R ⟶ ω = ∂t φ[t] mit der Winkelbeschleunigung α = ∂t,t φ[t] an = ω2 R Bild 5.2.6: Winkel, Winkelgeschwindigkeit und -beschleunigung 5.2.7 Eine nichtgeführte, allgemeine Bewegung wird in der Vektorkinematik mit einem Beschleunigungsvektor veka erfasst, dessen einmalige zeilenweise Integration liefert uns den Geschwindigkeitsvektor, die nochmalige Integration den Ortsvektor veks : veka = ax [t] ay [t] vx [t] = ∫ ax [t] ⅆ t ⟶ vekv = az [t] vy [t] = ∫ ay [t] ⅆ t vz [t] = ∫ az [t] ⅆ t sx [t] = ∫ vx [t] ⅆ t ⟶ veks = sy [t] = ∫ vy [t] ⅆ t sz [t] = ∫ vz [t] ⅆ t Anmerkung: Die Bestimmung der Integrationskonstanten der obigen unbestimmten Integrale erfolgt über die entsprechenden kinematischen Randbedingungen. 5.2.8 NEWTONs zweites Gesetz (5.1.9) wird in der Regel als dynamisches Grundgesetz bezeichnet. In kartesischen Koordinaten geschreiben lautet es für eine allgemeine Bewegung, bei der Translation und Rotation gleichzeitig auftreten können (vgl. hierzu auch [58, Absatz 9.9]): vekF = ∑ Fx ∑ Fy ∑ Fz = m ax ay az 5.2.9 Im Falle der Bewegung in einer Ebene ist auch eine Beschreibung mit den beiden natürlichen Koordinaten möglich. Diese erfassen die Tangential- und Normalrichtung. Folglich erhält man mit den Beziehungen vom Absatz 5.2.4 die Ausdrücke: 6 baudyn_05_newton.nb vekF = ∑ Ft ∑ Fn = m at = m an ∂t,t st (∂t st )2 R 5.2.10 Die formale Umstellung der beiden Terme des NEWTONschen zweiten Gesetzes (5.1.9) auf eine einzige Gleichungsseite führt uns auf ein Kräftegleichgewichtsproblem (vgl. hierzu auch [58, Absatz 9.9 bzw. Absatz 16.13]). Dieser Gedanke geht auf Jean d`ALEMBERT (1717 - 1783) zurück, was historisch zur Herausarbeitung des d`ALEMBERTschen Prinzips führte, das hinsichtlich seiner praktischen Nutzung als quasistatisches Prinzip interpretiert werden kann. Die dynamische Auffassung gemäß NEWTON und die quasistatische Auffassung nach d`ALEMBERT sind zwar völlig gleichwertig, sollten jedoch nicht gleichzeitig angewendet werden, da dies zu logischen Fehlschlüssen führt [27]. ∑ Fx ∑ Fy ∑ Fz -m ax ay az = 0 0 0 Anmerkung: Das d`ALEMBERTsche Prinzip (siehe [58, Absatz 16.8 ff.]) kann man auch als Übergang von der NEWTONschen zur LANGRANGEschen Mechanik betrachten [67], auf die im Abschnitt 2.6 “Analytische Mechanik” ausführlicher eingegangen wird. 5.2.11 Der Kraftvektor (blau) repräsentiert im d`ALEMBERTschen Prinzip die eingeprägte Kraft, das negative Produkt von Masse mal Beschleunigungsvektor (rot) die d`ALEMBERTsche Kraft. Letztere wird in der Technischen Mechanik in der Regel als Trägheitskraft (Trägheitswiderstand) bezeichnet, die der Beschleunigungsrichtung entgegenwirkend angesetzt werden muss. 5.2.12 Wir wenden den d`ALEMBERTschen Formalismus auf den Absatz 5.2.9 an: ∑ Ft - m at ∑ Fn - m an = ∑ Ft - m ∂t,t s 2 ∑ Fn - m (∂t s) R = 0 0 0 Anmerkung: Ist die Beschleunigungsrichtung unbekannt, bedeutet ein negatives Vorzeichen im Endergebnis einer Berechnung, dass der d`ALEMBERTsche Gleichungsansatz falsch war. Das Berechnungsmodell muss nochmals mit verändertem Vorzeichen neu aufgestellt werden. 5.2.13 Die radiale Trägheitskraft - m an ≏ - m v 2 R bezeichnet man als Zentrifugalkraft (Fliehkraft). Sie ist fiktiv und steht im “statischen” Gleichgewicht mit der Zentripetalkraft (Normalkraft), die als Zwangskraft die eigentliche Ursache für die Bewegung auf gekrümmten Bahnen ist und stets zum Drehzentrum gerichtet sein muss. 5.2.14 Ein starrer Körper besitzt sechs Freiheitsgrade, drei freie Verschiebungen (Translationen) und drei freie Verdrehungen (Rotationen). Man vergleiche hierzu die bekannten Modellbildungen der Festigkeitslehre (siehe u. a. [58, Absätze 4.11 und 9.9]). Die Translationsbewegungen eines Starrkörpers können auf die idealisierten Bewegungen einer Punktmasse zurückgeführt werden. Es bleibt somit nur noch die Analyse der Drehungen offen. 5.2.15 Um uns das dynamische Grundgesetz der Rotation anschaulich auf Basis des dynamischen Grundgesetzes der Translation (Absatz 5.19) herzuleiten, nutzen wir das ebene Modell einer homoge nen Kreisscheibe (Bild 5.2.15), deren feste Drehachse durch ihren Schwerpunkt geht, womit diese eine Hauptachse ist (vgl. [58, Kapitel 17]). 7 baudyn_05_newton.nb Bild 5.2.15: Kreisscheibe mit der z-Achse als fester Drehachse 5.2.16 Auf das differenzielle Masseelement Δm, das im Abstand r vom Drehpunkt entfernt ist, wirke eine tangential angreifende Kraft ΔF. Diese Punktmasse erhalte auf ihrer geführten Kreisbahn eine Tangentialbeschleunigung. Dann gilt mit den Beziehungen des Absatzes 5.2.6: ΔF ~ Δm at und mit at = α r ⟹ ΔF ~ Δm α r 5.2.17 Wir erweitern beide Seiten mit r und summieren über alle Punkte der Kreisscheibe. Dann entspricht die linke Seite dem angreifenden Gesamtmoment M und auf der rechten Seite kann α vor das Integral gestellt werden, da alle Massepunkte der Kreisscheibe denselben Drehwinkel, also auch dieselbe Winkelbeschleunigung haben. ΔF r ~ Δm α r2 ⟶ r2 ⅆ m M = α (m ) = α J mit r2 ⅆ m J = (m ) 5.2.18 Der Buchstabe J steht für das Massenträgheitsmoment mit der Dimension [kg m 2 ≏ N m s 2 ]. Durch den Schwerpunkt eines Körpers lassen sich beliebig viele Drehachsen anordnen. Für zwei bestimmte, senkrecht aufeinander stehende Achsen findet man einen Größt- und einen Kleinstwert des Massenträgheitsmomentes. Zusammen mit einer dritten, auf beiden ebenfalls orthogonal stehenden Achse bezeichnet man sie als Hauptträgheitsachsen (man vgl. hierzu die Problematik der Hauptspannungen in einem Raumpunkt [58, Kapitel 9]). Die Methodik zur Berechnung der Massenträgheitsmomente für beliebige andere Drehachsen entspricht der aus der Festigkeitslehre bekannten Vorgehensweise bei den Flächenmomenten. So gelten u. a. auch die Sätze von STEINER für die Massenträgheitsmomente [58, Absatz 17.10]. Anmerkung: Analog zum Spannungstensor am Raumpunkt [58, Absatz 9.16] besitzt ein Starrkörper bei allgemeiner Betrachtung neun Massenträgheitsmomente, die in einem symmetrischen Trägheitstensor zweiter Stufe zusammengefasst werden [37]. 5.2.19 Als ein Anwendungsbeispiel bestimmen wir das Massenträgheitsmoment einer Kreisscheibe mit der Einheitsdicke dz = 1 um die Schwerachse z, die senkrecht auf der Kreisfläche steht (siehe Bild 5.2.15). Dazu müssen wir die differenzielle Masse dm mittels der Dichte ρ [ kg/m 3] und dem Volu- 8 baudyn_05_newton.nb men dV= dx dy dz ausdrücken: r2 ⅆ m J = ⟶ (m ) (V) R J ⩵ 1 ρ -R - J⩵ 1 2 r2 ρ ⅆ x ⅆ y ⅆ z J = π R3 R 2 -x2 R 2 -x2 ⟶ R R -R -R J = 1 ρ x2 + y2 ⅆ x ⅆ y x2 + y2 ⅆ y ⅆ x R2 ρ 5.2.20 Da das Produkt π R 2 ρ ≏ m der Masse der Kreisscheibe entspricht, verbleibt für ihr Massenträgheitsmoment der Ausdruck J = 0,5 m R 2 . 5.2.21 Die z-Achse ist übrigens eine Hauptachse, da sie eine Symmetrieachse darstellt. Hinsichtlich dieser Achse gilt die Kreisscheibe als dynamisch ausgewuchtet. Bei Drehung um eine gegen die zAchse geneigte Gerade spricht man in der Angewandten Mechanik von einer Taumelscheibe, weil die Fliehkräfte ein “aufrichtendes Moment” erzeugen, das die Hauptachse in Richtung Drehachse zu verlagern versucht (Bild 5.2.21). Bild 5.2.21: Taumelscheibe 5.2.22 Der d`ALEMBERTsche Ansatz für die Rotation um eine feste Drehachse hat die Form (vgl. Absatz 5.2.10 f.): M = 0 = Mres - J ∂t,t φ[t] mit Mres - resultierendes äußeres Moment Anmerkung: Analog zur Translation ist die Summe der tangential wirkenden Trägheitskräfte bei der Rotation (rot) der tatsächlichen Winkelbeschleunigung entgegengerichtet, weshalb sie in der dynamischen Gleichgewichtsbeziehung mit einem negativen Vorzeichen einzusetzen ist. 5.2.23 Neben der Zentrifugalkraft (Absatz 5.2.13) als radiale Trägheitskraft, existiert bei der Rotation noch eine zweite Trägheitskraft, die CORIOLISkraft F C . Diese nach Gaspard Gustave de CORIOLIS (1792-1843) benannte Trägheitswirkung, die ein in einem rotierenden Bezugssystem bewegter Körper mit der Masse m erfährt, ist ursächlich mit der Problematik gegeneinander beschleunigter Bezugssys- 9 baudyn_05_newton.nb teme verknüpft (siehe hierzu auch “Physikalische Ausfllüge”. ). Abschnitt 2.6 “Analytische Mechanik” bzw. Abschnitt 2.7 5.2.24 Die CORIOLISkraft steht auf der Ebene, die die Drehachse (Vektor vekω D ) und die Bewegungsrichtung des Körpers (Geschwindigkeitsvektor vekv) einschließen, senkrecht. Vektoriell geschrieben bedeutet dies (siehe Abschnitt 2.6): vekF C = 2 m vekv × vekω D = 2 m vekv vekω D Sin[v; ωD ] (v; ωD ) vekFc mit - Winkel zwischen den Vektoren vekv und vekω D , - CORIOLISkraft . 5.2.25 Um die obige Beziehung in vereinfachter Form herzuleiten, bedienen wir uns des Sonderfalles (v;ω D ) = 90°, d. h., der Körper bewegt sich auf einer Drehscheibe radial nach innen oder nach außen (Bild 5.2.25). Dann erfährt er infolge der senkrecht anreifenden CORIOLISkraft eine tangentiale CORIOLISbeschleunigung aC , die der Rotation entgegen gerichtet ist. Unter Beachtung von Absatz 3.11 findet man schließlich: R = vR t ⟶ Δs = R ωD t = vR t ωD t = vR ωD t2 ⟶ Δs = 1 2 a C t 2 ⟶ F C = m a C = 2 m vR ω D Bild 5.2.25: Bewegter Körper auf rotierender Scheibe 5.2.26 Die Erweiterung des Scheibenmodells auf die Oberfläche einer rotierende Kugel (Erde) erfordert eine räumliche Transformation der Bezugssysteme (siehe Abschnitt 2.6). Die sich daraus ergebenden Beziehungen spielen sowohl in der Meteorologie (vgl. hierzu u. a. den Unterabschnitt 21.2.2) als auch in der Ballistik eine wichtige Rolle. Solange sich Wasser- und Luftströmungen oder Geschosse nicht entlang eines Breitengrades bewegen, werden sie infolge der CORIOLISkraft auf der Nordhalbkugel im Uhrzeigersinn, und auf der Südhalbkugel entgegen des Uhrzeigersinns abgelenkt. Da die CORIOLISKRAFT nur für einen mit dem Bezugssystem rotierenden Betrachter relevant ist, stellt sie eine scheinbare Trägheitskraft dar. Für einen raumfesten Beobachter tritt sie nicht auf. Anmerkung: Eine sehr beeindruckende Manifestation der CORIOLISkraft stellt der FOUCAULTsche Pendelversuch dar. 1851 erbrachte Léon FOUCAULT (1819 - 1868) im Pariser Panthéon mittels eines Pendels (Pendelmasse 28kg, Pendellänge 67m) den sichtbaren Nachweis der Erdrotation. 10 baudyn_05_newton.nb ◻ 5.3 Arbeit, Energie, Leistung und Drehimpuls [37][66] 5.3.1 Nur die Tangentialkomponente einer Kraft, die in Richtung eines vorgegeben Weges weist, verrichtet Arbeit: W = W Ft s sa , se se sa Ft [s] ⅆ s mit - mechanische Arbeit in [Nm] - tangentiale Kraftkomponente in Richtung von s - Wegstrecke längs der Kraftrichtung von Ft - Anfangs- bzw. Endpunkt des Weges 5.3.2 Wenn man nach Absatz 5.2.4 für das Differenzial ds = v dt setzt und das Arbeitsintegral formal unbestimmt lässt, eröffnet sich uns die Möglichkeit einer interessanten Umformung: W = v Ft [t] ⅆ t ⟶ ∂t W = v Ft ≏ Pt [t] ⟶ W = te ta Pt [t] ⅆ t 5.3.3 Das Produkt der Momentangeschwindigkeit mit der zugehörigen Tangentialkraft bezeichnet man als die mechanische Leistung Pt (t) in [Nms -1]. Die “geleistete” mechanische Arbeit entspricht dem Zeitintegral über die Leistung. 5.3.4 Wird eine Punktmasse m in einem Schwerefeld mit der konstanten Beschleunigung g vom Punkt A zum Punkt B bewegt, so ist die dazu erforderliche Arbeit unabhängig vom Weg. Egal ob man die Masse im Bild 5.3.4 über den Weg s 1 , s2 oder s3 führt, die Schwerkraft F = m g leistet laut Definition (5.3.1) nur in Richtung h Arbeit. Sie beträgt W pot = m g h. Wäre z. B. die Strecke s 2 als Zwangsweg vorgegeben, dann betrüge die Strecke s 2 = h sin α und die zugehörige tangentiale Kraft Ft = m g sin α, was wiederum die Arbeit W pot = m g h zum Ergebnis hat. Bild 5.3.4: Punktmasse im Schwerefeld 5.3.5 Das Schwerefeld stellt ein Potenzial- bzw. konservatives Kraftfeld dar. Für konservative Kräfte ist das Arbeitsintegral unabhängig vom Weg. Durch Verschieben einer Masse im Schwerefeld entgegen 11 baudyn_05_newton.nb dessen Wirkrichtung oder durch das Dehnen einer Zugfeder (vgl. [58, Kapitel 16]) werden deren Potenziale, sprich die Fähigkeiten der Systeme Arbeit zu verrichten, erhöht. Um einem derart veränderten Zustand Rechnung tragen zu können, wurde der Begriff der Energie eingeführt. Im Gegensatz dazu soll mit dem Terminus der Arbeit der Vorgang erfasst werden. 5.3.6 Da in den beiden genannten Beispielen nur die Anfangs- und Endpunkte von Bedeutung sind, spricht man in Sonderheit von potenziellen Energien. Im ersten Fall benutzt man hierfür auch den Ausdruck der Lageenergie. Bei der Feder bezeichnet man diese als Energie der elastischen Deforma tion, hingegen wird der Begriff der Formänderungsarbeit [58, Kapitel 16] benutzt, wenn man mehr den Vorgang des Dehnens vor Augen hat. 5.3.7 Die Arbeit, die zur Beschleunigung einer Masse auf eine bestimmte Geschwindigkeit gebraucht wird, bezeichnet man als kinetische oder Bewegungsenergie W kin . Um deren allgemein bekannte Form, die unten rot hervorgehoben ist, herzuleiten, gehen wir wieder den heuristischen Weg: t2 B Wkin = Ft ⅆ s = A ⅆ mit m 2 ⅆt 2 =2 ⅆt t2 ⅆs t1 ⅆ ⅆs ⅆt ⅆt t1 Ft ⅆs ⅆt ⅆt = ⅆ2 s ⅆs ⅆ t (ⅆ t)2 2 ⅆt = m 2 v2 = v t2 ⅆ2 s m (ⅆ t) t1 folgt ⅆ v2 = v1 =0 m 2 ⅆs 2 ⅆt ⅆt , schließlich v2 2 - v1 2 = m 2 v2 = W kin 5.3.8 Aus der obigen Ableitung ergibt sich, dass die einer Punktmasse auf dem Weg von A nach B eingeprägte potenzielle Arbeit (blau) der Differenz der kinetischen Energien (rot) in diesen beiden Punkten äquivalent ist. 5.3.9 Die in den drei oben angeführten Beispielen aufgewendeten Arbeiten können vollständig zurückgewonnen werden, indem die Masse im Schwerefeld zurückgesetzt, die Feder entspannt bzw. die beschleunigte Masse vollkommen abgebremst wird. 5.3.10 In einem konservativen System besteht für jeden Zeitpunkt eines Bewegungsvorganges die fundamentale Bezeihung: - W pot,B - W pot,A = Wkin,B - Wkin,A ⟹ Wpot,A + Wkin,A = Wkin,B + Wpot,B = const. 5.3.11 Die obige Aussage repräsentiert das Gesetz von der Erhaltung der Energie in einem abgeschlossenen System, das auf Robert von MAYER (1814 - 1878) zurückgeht. In dieser Form besitzt der Energieerhaltungssatz jedoch eine sehr hohe Idealisierung, da es im Prinzip keine Bewegungen ohne Energieverluste gibt. So treten bei der Mehrzahl sich bewegender technischer Systeme Verluste infolge von Reibungskräften auf. Diese Kräfte sind bahnabhängig und können nicht zurückge wonnen werden, weshalb sie auch als Nichtpotenzialkräfte W nonpot bezeichnet werden. 5.3.12 Für reale technische Anwendungen verwendet man deshalb eine modifizierte Form des Energieerhaltungssatzes, wobei sowohl Translations- als auch Rotationsbewegungen erfasst werden (siehe Absatz 5.3.15): W pot,A + W kin,A ± Wnonpot = W kin,B + W pot,B Anmerkung: Wenn die Nichtpotenzialkraft mit der Bewegungsrichtung übereinstimmt, wird ihr Energiebeitrag mit einem positiven Vorzeichen berücksichtigt (z. B. die Reibungskraft beim Anfahren 12 baudyn_05_newton.nb eines Fahrzeuges). Eine Verlustarbeit ist negativ. 5.3.13 Als klassische Beispiele für den zeitabhängigen Wechsel der Anteile zwischen potenzieller und kinetischer Energie gelten der Einmassenschwinger (Kapitel 7) bzw. das mathematische Pendel (Kapitel 25). In den beiden maximalen Auslenkungspunkten besitzen die Massepunkte keine kinetische Energie (v ≡ 0 !), dafür aber ihre größte potenzielle Energie. Im Moment des Kreuzens der statischen Ruhelage haben sie ihre größte Bahngeschwindigkeit, die kinetische Energie ist maximal, die potenzielle Energie des schwingenden Systems jedoch null. Die Summe beider Energiearten bleibt konstant, insofern ein reibungsfreier (ungedämpfter) Vorgang angenommen wird. 5.3.14 Bei den bisherigen Überlegungen zur Problematik von mechanischer Arbeit und Energie wurde die für Translationen übliche Formelsprache verwendet. Die Beziehung für die kinetische Energie bei der Rotation einer Masse um eine feste Achse ergibt sich als einfache Analogie. Arbeit und Leistung eines Drehmomentes lassen sich aus den bekannten translatorischen Gleichungen entwickeln: J ω2 Kinetische Energie : Wrot,kin = Arbeit und Leistung : Wt = Ft [s] ⅆ s 2 Wrot = M[φ] ⅆ φ ⟺ folgt und m 2 v2 = Wt,kin mit ⅆs = r ⅆφ und M = Ft [s] r ∂t Wrot ≏ Prot = M ω Anmerkung: Um Energie und Leistung hinsichtlich ihrer Ursache zu unterscheiden, führe ich im Falle einer Rotation den Index rot und bei einer Translation das kleine t hinzu. 5.3.15 Wie bereits im Absatz 5.3.12 angedeutet worden ist, können im Energiesatz sowohl die kinetischen Rotations- als auch die Translationsenergien ohne Einschränkungen überlagert werden. Dasselbe gilt für die infolge Verschiebung bzw. Verdrehung gespeicherten potenziellen Energieanteile. 5.3.16 Wegen des Schwerpunktsatzes der Mechanik ist das dynamische Grundgesetz der Rotation gemäß Absatz 5.2.15 ff. auch gültig, wenn keine feste Drehachse vorliegt. Das der Winkelbeschleuni gung proportionale Moment entspricht dem Moment, welches die auf den Schwerpunkt eines Körpers bezogene resultierende Kraft erzeugt. Somit ist das auf den Schwerpunkt bezogene Massenträgheitsmoment der Proportionalitätsfaktor. Der Schwerpunktsatz besagt, dass der Schwerpunkt (Massenmittelpunkt) eines Systems sich so bewegt, als ob die gesamte Masse des Systems in ihm vereinigt wäre und die resultierende äußere Kraft in ihm angriffe. Das gilt auch, wenn die tatsächliche Wirkungslinie außerhalb des Schwerpunktes liegt. Da der senkrechte Abstand zwischen den parallelen Geraden, fiktive Schwerpunktlinie und tatsächliche Wirkungslinie, dann ungleich null ist, entsteht um den Schwerpunkt eine Drehbewegung, die sich der Translationsbewegung überlagert. ☺ Versteckte Zelle mit Beispielaufgaben , wie z. B. die rollende Scheibe auf einer horizontalen bzw. schiefer Ebene. 5.3.17 Multiplizieren wir die differenzielle Masse dm gemäß dem Bild 5.2.15 mit der zugehörigen momentanen Bahngeschwindigkeit, erhalten wir laut Absatz 5.1.15 das Differenzial des Impulses dp = v dm. Bewerten wir dieses Produkt wieder mit dem Abstand r zur Drehachse und integrieren über die gesamte rotierende Masse des betreffenden Körpers, erhält man den Drehimpuls oder Drall L um die feste Drehachse z: 13 baudyn_05_newton.nb L= r ⅆp = (m ) r v ⅆ m = ω Jzz ⟶ ∂t L = Jzz ∂t ω ≏ Mz (m ) 5.3.18 Im Sinne der Vektorkinematik sind sowohl die Bahngeschwindigkeit, als auch die Winkelgeschwindigkeit zwei Vektoren, die über Vermittlung des Ortsvektors zueinander senkrecht stehen (siehe versteckte Zelle nach dem Absatz 5.2.3). Findet eine Rotation um die Trägheitshauptachse statt, dann sind der Vektor der Winkelgeschwindigkeit und der Drallvektor gleichgerichtet und mit der Drehachse deckungsgleich. 5.3.19 Wenn bei einem rotierenden System das resultierende äußere Moment null ist, gilt ∂t L ≡ 0, also L = const., das heißt, der Drehimpuls bleibt erhalten. Diese Tatsache stellt den Drehimpulserhal tungsatz dar. Analog kann dies für die Translation (siehe Absatz 5.1.15) formuliert werden, was uns auf den Impulserhaltungssatz ∂t p ≡ 0 mit p = const. führt, womit wir wieder bei den NEWTONschen Axiomen des Abschnittes 5.1 angekommen sind. 5.3.20 Weiterführende Ausführungen sollen vorerst nicht Gegenstand dieses Abschnittes sein. Dazu sei auf den Abschnitt 2.6 “Prinzipien der kanonischen Mechanik” sowie auf die obigen versteckten Zellen zur Vektorkinematik und zu den Beispielen verwiesen. Abschließend werden die wichtigsten Aussagen in Form eines Analogievergleiches zwischen Translation und Rotation zusammengefasst (nach [37]): 14 baudyn_05_newton.nb Translation Rotation Ortsvektor Rotationswinkel Sonderfall : s (t) φ (t) Geschwindigkeit v = ∂t s Winkelgeschwindigkeit ω = ∂t φ Beschleunigung a = ∂t v Winkelbeschleunigung α = ∂t ω Masse m Trägheitstensor J Impuls p=mv Drehimpuls L = Jω Kraft F = ∂t p Moment M = ∂t L konstante Masse F = m a Impulserhaltungssatz F =0 p = const. Kinetische Energie 1 1 pv = m v2 Wt,kin = 2 2 Translationsarbeit Wt = se sa F ⅆs feste Drehachse z M z = Jzz ω Erhaltungssatz des Drehimpulses M = 0 L = const. Rotationsenergie 1 1 Lω= J ω2 Wrot,kin = 2 2 Rotationsarbeit Wrot = ϕe M ⅆφ φa ◻ 5.4 Ausgewählte Beispiele der traditionellen Technischen Mechanik [143][144]