Quantendynamik des harmonischen Oszillators - Physik Uni
Werbung

Bachelorarbeit im Studienfach Physik
Quantendynamik des harmonischen
Oszillators
vorgelegt am
Lehrstuhl für Theoretische Physik II
an der
Universität Augsburg
Von:
Matrikelnummer:
Michael Gromer
1176716
Am:
13.
2014
15.Mai
April
2014
Erstgutachter:
Betreuer:
Prof. Dr. Ulrich Eckern
Dr. Michael Dzierzawa
Inhaltsverzeichnis
1
2
Einleitung
Harmonischer Oszillator
2.1
2.2
3
4.2
4.3
4.4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5.4
5.5
7
7
8
10
11
14
20
23
Quantenmechanische Störungstheorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
28
Euler-Verfahren . . . . . . . . . . . . . . . . . . . . . . . .
4.1.1 Explizites Euler-Verfahren . . . . . . . . . . . . . .
4.1.2 Implizites Euler-Verfahren . . . . . . . . . . . . . .
Runge-Kutta-Verfahren . . . . . . . . . . . . . . . . . . . .
Klassische Betrachtung . . . . . . . . . . . . . . . . . . . .
Quantenmechanische Betrachtung . . . . . . . . . . . . . .
4.4.1 Ortsbasis . . . . . . . . . . . . . . . . . . . . . . .
4.4.2 Besetzungszahlbasis des harmonischen Oszillators .
4.4.3 Besetzungszahlbasis des anharmonischen Oszillators
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Ergebnisse
5.1
5.2
5.3
6
7
.
.
.
.
.
.
.
Numerische Behandlung
4.1
5
Klassische Betrachtung . . . . . .
2.1.1 Ungetriebener Fall . . . .
2.1.2 Mit treibender Kraft . . .
Quantenmechanische Betrachtung
2.2.1 Ungetriebener Fall . . . .
2.2.2 Mit treibender Kraft . . .
2.2.3 Störungstheorie . . . . . .
Anharmonischer Oszillator
3.1
4
5
Analytische Lösungen . . . . . . . . . . . . . . . . . .
Störungstheorie . . . . . . . . . . . . . . . . . . . . . .
Numerische Methoden . . . . . . . . . . . . . . . . . .
5.3.1 Programm . . . . . . . . . . . . . . . . . . . . .
5.3.2 Instabilität . . . . . . . . . . . . . . . . . . . .
Numerische Ergebnisse für den harmonischen Oszillator
5.4.1 Klassisch . . . . . . . . . . . . . . . . . . . . .
5.4.2 Quantenmechanisch . . . . . . . . . . . . . . .
5.4.3 Genauigkeit . . . . . . . . . . . . . . . . . . . .
Anharmonischer Oszillator . . . . . . . . . . . . . . . .
5.5.1 Eigenzustände . . . . . . . . . . . . . . . . . .
5.5.2 Zeitentwicklung . . . . . . . . . . . . . . . . .
Zusammenfassung
Anhang
28
28
30
31
34
35
35
38
39
41
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
41
45
47
47
48
49
49
52
58
61
61
65
70
71
A.1 Integration von Gleichung (2.16) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
A.2 Herleitung der Relation (2.57) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
A.3 Berechnung der Matrixdarstellung von x̂4 . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Literatur
76
3
1 Einleitung
Genauso, wie das zweite newtonsche Gesetz und äquivalente Formulierungen davon die grundlegenden
Gleichungen der klassischen Mechanik darstellen, bildet die Schrödingergleichung das Fundament der
Quantenmechanik. Sie ist damit der Ausgangspunkt für jedes quantenmechanische Problem. Wie jedoch
schon in der Bachelorvorlesung „Quantenmechanik“ klar wird, sind ihre Lösungen, bedingt durch ihre Form
(eine partielle Differentialgleichung) und das Vorhandensein des Potentials in der Gleichung, nur in den seltensten Fällen in mathematisch geschlossener Form darstellbar, also analytisch lösbar. Ist dies nicht mehr
möglich, so kann man einerseits das Potential durch ein analytisch Lösbares annähern oder man verwendet
Näherungsmethoden zur Lösung des ursprünglichen Potentials. Von diesen Näherungsmethoden sollen in
dieser Bachelorarbeit die Störungstheorie und die numerische Berechnung der Lösung betrachtet werden.
Zusätzlich wird auch die klassische Lösung als Referenz hinzugezogen und somit das Ehrenfest-Theorem
überprüft.
Es wird von einem harmonischen Oszillator ausgegangen, denn dieser hat den Vorteil, dass er einerseits
eines der Probleme ist, die noch analytisch lösbar sind und somit später die Resultate der verschiedenen
Näherungen mit der exakten Lösung verglichen werden können. Andererseits kann aber auch durch eine
einfache Modifikation, indem man einen quartischen Term zum Potential addiert, ein Fall konstruiert werden, der nicht mehr analytisch lösbar ist und somit nur noch näherungsweise behandelt werden kann. In
beiden Fällen wird der Oszillator zusätzlich durch eine zeitabhängige äußere Kraft angetrieben.
Die Wahl des harmonischen Oszillators ist aber nicht nur aus technischer Sicht sinnvoll. Der harmonische
Oszillator kann sehr gut auch für praktische Anwendungen eingesetzt werden: so können in der Molekülphysik die Bindungen zweier Atome näherungsweise durch eine ideale Feder beschrieben werden und eine
solche Feder stellt genau einen harmonischen Oszillator dar. Dies ist sowohl für lineare Schwingungen
(zwei verbundene Massepunkte) als auch für Torsionsschwingungen wie z.B. das Ethenmolekül möglich.
Man kann also Vorhersagen über die Schwingungsspektren treffen [Wik14]. Ein weiteres Beispiel ist das
Einstein-Modell: es beschreibt die Phononen, also Gitterschwingungen, in einem Festkörper, indem für jedes Atom das Potential eines dreidimensionalen harmonischen Oszillators verwendet wird. Damit kann der
Beitrag optischer Phononen zur Wärmekapazität eines Festkörpers berechnet werden [Wul03]. Auch andere
physikalische Phänomene können auf einen harmonischen Oszillator zurückgeführt werden: so bewegt sich
beispielsweise ein geladenes Teilchen in einem Magnetfeld spiralförmig. Der zum Magnetfeld senkrechte
Anteil dieser Bewegung kann durch einen eindimensionalen harmonischen Oszillator beschrieben werden
und man erhält dabei die Landau-Quantisierung [Wei04]. Allgemein kann jede Potentialmulde in erster
Näherung, für genügend kleine Auslenkungen, durch ein harmonisches Potential angenähert werden.
Besonderes Augenmerk wird in dieser Arbeit auf die numerische Lösung gelegt: diese ist vom Prinzip her
sehr simpel und darüber hinaus ist ihre Genauigkeit nur durch die zur Verfügung stehende Rechenleistung
bzw. Rechenzeit begrenzt. Es können also auch mit einer einfachen numerischen Methode beliebig genaue
Ergebnisse erzielt werden, wenn genügend Rechenleistung zur Verfügung steht. In der heutigen Zeit reicht
schon ein handelsüblicher PC vollkommen aus, um für eindimensionale Probleme in kurzer Zeit sehr genaue
Resultate zu bekommen.
Ziel dieser Arbeit ist es, am Beispiel des getriebenen harmonischen bzw. anharmonischen Oszillators
zu untersuchen, welche numerischen Verfahren am besten geeignet sind, die Zeitentwicklung des Systems
zu berechnen. Dazu werden die numerischen Ergebnisse mit den vorhandenen analytischen bzw. störungstheoretischen Resultaten verglichen. Ein weiterer wichtiger Aspekt ist die Stabilität und Genauigkeit der
betrachteten Verfahren sowie die benötigte Rechenzeit.
Die restlichen Abschnitte der Arbeit sind wie folgt aufgebaut: In Kapitel 2 werden die analytischen Lösungen für den klassischen und quantenmechanischen harmonischen Oszillator hergeleitet. Zusätzlich wird die
Lösung in zeitabhängiger Störungstheorie erster Ordnung gesucht. In Kapitel 3 werden wir uns dem anhar-
5
monischen Oszillator zuwenden und die Eigenzustände störungstheoretisch in erster Ordnung bestimmen.
In Kapitel 4 werden einige numerische Verfahren vorgestellt und erklärt, wie mit ihnen die Zeitentwicklung des harmonischen und anharmonischen Oszillators berechnet werden kann. Schließlich werden wir in
Kapitel 5 die Ergebnisse aller betrachteter Verfahren miteinander vergleichen und so die Stabilität und Genauigkeit der numerischen Verfahren analysieren. Zuletzt wird dann der anharmonische Oszillator mithilfe
der numerischen Verfahren genauer betrachtet. Einige eher technische Berechnungen werden im Anhang
präsentiert.
6
2 Harmonischer Oszillator
2.1 Klassische Betrachtung
Im Folgenden wird zuerst der klassische harmonische Oszillator betrachtet. Dieser ist einerseits einfacher
zu behandeln als der quantenmechanische Oszillator, da man es nicht mit einer Wellenfunktion zu tun hat,
sondern nur mit einem einzelnen Massepunkt. Andererseits werden wir später zeigen, dass die Ergebnisse
zumindest für den harmonischen Fall mit den quantenmechanischen Mittelwerten übereinstimmen.
Wie eingangs schon erwähnt, ist die, der klassischen Mechanik zugrunde liegende Gleichung, das zweite
newtonsche Gesetz (die Masse m wird hier und im Folgenden immer als konstant betrachtet):
F = ma
mit a = v̇ = ẍ =
d2 x
dt2
(2.1)
Diese Gleichung beschreibt, wie sich das System, bei gegebenem Anfangszustand im Lauf der Zeit verändert. Genau genommen beschreibt sie, wie der Massepunkt beschleunigt wird, nämlich mit der Beschleunigung mF .
2.1.1 Ungetriebener Fall
Abbildung 2.1: Vorstellung des eindimensionalen klassischen Oszillators
Die Vorstellung, die hinter dem eindimensionalen klassischen Oszillator steht, ist ein Federpendel (siehe
Abbildung 2.1): ein Massepunkt der Masse m kann sich in einer Dimension, also z.B. nach links und nach
rechts, bewegen. Über eine Feder ist er mit einem festen Punkt, z.B. an einer Wand, verbunden. Außer der
Kraft, die durch die Feder verursacht wird, wirken keine weiteren Kräfte auf den Massepunkt. Dies reicht
aus um ein schwingungsfähiges System zu erzeugen. Nimmt man nun eine ideale Feder an, also eine Feder
deren Rückstellkraft direkt proportional zur Auslenkung ist:
F = −kx
(2.2)
erhält man den harmonischen Fall. Hierbei ist F die Kraft, die durch die Feder auf den Massepunkt wirkt,
k die Federkonstante und x die Auslenkung aus der Ruhelage. Diese Kraft ist konservativ und kann somit
7
durch ein Potential mit F = − dV
dx ausgedrückt werden. Dieses lautet:
1
V(x) = kx2
(2.3)
2
Setzt man die Gleichung für die Federkraft (2.2) in das zweite newtonsche Gesetz (2.1) ein, ergibt sich die
Differentialgleichung des eindimensionalen klassischen harmonischen Oszillators:
m ẍ = −kx
(2.4)
Diese lineare harmonische Differentialgleichung kann allgemein mit einem Exponentialansatz gelöst werden. Gehen wir davon aus, dass der Massepunkt aus der Ruhelage ausgelenkt wird und dann bei x(0) = x0
mit v(0) = 0 losgelassen wird, kann man direkt den Ansatz
x(t) = x0 cos(ω0 t)
(2.5)
verwenden. Wir setzen dies in (2.4) ein und erhalten:
r
k
(2.6)
m
Gleichung (2.5) mit (2.6) löst die Gleichung (2.4) und ist somit die Bewegungsgleichung des eindimensionalen klassischen harmonischen Oszillators für die oben angegebenen Anfangsbedingungen. Der Massepunkt
schwingt mit der Frequenz f0 = ω2π0 zwischen den Umkehrpunkten x0 und −x0 sinusförmig hin und her,
daher kommt die Bezeichnung „harmonisch“.
Außerdem wird üblicherweise k durch m und ω0 ausgedrückt. Somit ist direkt die Frequenz vorgegeben
und für das Potential ergibt sich:
ω0 =
1
V(x) = mω20 x2
2
(2.7)
2.1.2 Mit treibender Kraft
Nun muss sich ein solches Federpendel aber nicht für immer im selben Schwingungszustand befinden,
sondern es kann auch nach dem Zeitpunkt t = 0 von außen angeregt werden. Um auf die Vorstellung
des Massepunktes und der Feder zurückzukommen: dies geschieht indem der zuvor feste Punkt, an dem
die Feder an der Wand befestigt war, bewegt wird. In Formeln ausgedrückt bedeutet dies, dass auf den
Massepunkt nun nicht nur die Kraft der Feder wirkt sondern zusätzlich eine zeitabhängige Störung FS (t).
Entsprechend erhält man ein zeitabhängiges Potential:
1
V(t,x) = mω20 x2 − FS (t)x
(2.8)
2
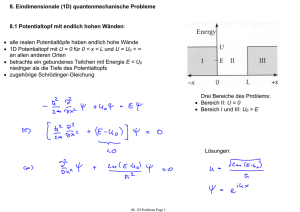
Für die treibende Kraft FS (t) werden wir im Folgenden eine Kraft mit sinusförmigem Verlauf und Kreisfrequenz ωS , die mit einer ansteigenden Exponentialfunktion bis zu einem Zeitpunkt tS eingeschaltet und von
da an mit der selben, umgekehrten Exponentialfunktion wieder ausgeschaltet wird, verwenden. Die maximale Amplitude wird mit AS bezeichnet. Dies sieht dann wie in Abbildung 2.2 aus oder, in einer Formel
ausgedrückt, folgendermaßen:
FS (t) = AS cos(ωS t)e−B|t−tS |
(2.9)
Diese spezielle Form der Kraft hat den Vorteil, dass sie analytisch sehr leicht zu behandeln ist.
Um die Bewegungsgleichung aus der Formel für die Kraft zu erhalten wird diese wieder in das zweite
newtonsche Gesetz (2.1) eingesetzt und man erhält:
ẍ + ω20 x =
FS
m
(2.10)
Diese Gleichung entspricht genau der Gleichung (2.4), allerdings nun mit der Inhomogenität FmS . Sie beschreibt allgemein den eindimensionalen klassischen getriebenen harmonischen Oszillator. Um sie zu lösen
verwendet man die greensche Funktion.
8
1
0,5
0
−0,5
−1
0
20
40
60
80
100
t
120
140
160
180
200
Abbildung 2.2: Treibende Kraft FS (t) mit AS = ωS = 1, B = 0,05 und tS = 100
Greensche Funktion
Gegeben sei eine lineare inhomogene Differentialgleichung:
L̂y(x) = f (x)
(2.11)
wobei L̂ ein linearer Differentialoperator ist:
L̂ =
n
X
i=0
ci
∂i
∂xi
(2.12)
Die allgemeine Lösung dieser Differentialgleichung ist die Summe aus der allgemeinen Lösung der homogenen Differentialgleichung ( f (x) = 0) und einer speziellen Lösung der inhomogenen Differentialgleichung
(2.11). Gesucht ist nun diese spezielle Lösung.
Wenn nun zu L̂ eine Funktion G(x,x0 ) existiert, die LG(x,x0 ) = δ(x − x0 ) erfüllt, so kann man die Lösung
von Gleichung (2.11) auch in der Form
Z ∞
y(x) =
G(x,x0 ) f (x0 )dx0
(2.13)
−∞
schreiben. Dies ist möglich, da der Differentialoperator L̂ nur auf x wirkt und nicht auf die Integrationsvariable x0 .
Lösung
Der Differentialoperator des harmonischen Oszillators (2.10) ist gegeben durch:
L̂ =
∂2
+ ω20
∂t2
(2.14)
mit zugehöriger greenscher Funktion G(t,t0 ) [HW09, S. 82]:
G(t,t0 ) =
1
sin(ω0 (t − t0 ))Θ(t − t0 )
ω0
(2.15)
9
Dabei ist Θ(t − t0 ) die Stufenfunktion. Die spezielle Lösung, die man durch die greensche Funktion erhält
sieht also folgendermaßen aus:
Z
1 ∞
x(t) =
G(t,t0 )FS (t0 )dt0 =
m −∞
Z t
1
sin(ω0 (t − t0 ))FS (t0 )dt0 =
=
mω0 −∞
Z t
0
AS
=
sin(ω0 (t − t0 )) cos(ωS t0 )e−B|t −tS | dt0
(2.16)
mω0 −∞
Die Integration dieses Ausdrucks bedarf keines besonderen Geschicks, es müssen lediglich die Trigonometrischen Funktionen durch e-Funktionen ausgedrückt werden. Um dann über den Betrag zu integrieren,
integrieren wir für t > tS von −∞ bis tS mit negiertem t − tS und dann von tS bis t. Für den Fall, dass t < tS
integrieren wir nur von −∞ bis t. Die gesamte Rechnung ist für diesen Fall im Anhang unter A.1 zu finden.
Für einige spätere Rechnungen, die ähnlich verlaufen, wird dann ein Computerprogramm verwendet und
hier nur noch das Ergebnis angegeben. Hier ergibt sich für t < tS :
AS eB(t−t0 ) − C1 sin(ωS t) + C2 cos(ωS t)
2mω0
(2.17)
AS D1 sin(ω0 t) + D2 cos(ω0 t) + eB(tS −t) C1 sin(ωS t) + C2 cos(ωS t)
2mω0
(2.18)
x(t) =
Und für t > tS :
x(t) =
Dabei wurden zur Vereinfachung folgende Konstanten verwendet:
C1 =
D1 =
B
B
−
(ω0 + ωS )2 + B2 (ω0 − ωS )2 + B2
2B cos((ω0 + ωS )tS ) 2B cos((ω0 − ωS )tS )
+
(ω0 + ωS )2 + B2
(ω0 − ωS )2 + B2
C2 =
ω0 + ωS
ω0 − ωS
+
(ω0 + ωS )2 + B2 (ω0 − ωS )2 + B2
D2 = −
2B sin((ω0 + ωS )tS ) 2B sin((ω0 − ωS )tS )
−
(ω0 + ωS )2 + B2
(ω0 − ωS )2 + B2
Dieses Ergebnis ist durch die Aufteilung der trigonometrischen Funktionen und des Betrages recht unübersichtlich. Es stellt jedoch die exakte Form der Bewegungsgleichung für den klassischen getriebenen
harmonischen Oszillator mit der oben angegeben Form für die treibende Kraft FS dar. Betrachtet man diese
Bewegungsgleichung so wird klar, wie sich der Oszillator verhält: bis zum Zeitpunkt tS wird ihm die Anregungsfrequenz ωS aufgezwungen und die Schwingungsamplitude steigt, wie auch die Anregungsamplitude,
exponentiell an. Für Zeiten größer als tS schwingt der Oszillator mit seiner Eigenfrequenz ω0 weiter, wobei
diese Schwingung mit einer exponentiell abfallenden Schwingung in Anregungsfrequenz überlagert wird.
Die Amplituden und Phasen sind dabei in den Konstanten C1 , C2 , D1 und D2 enthalten.
Oben wurde bereits gesagt, dass man, um die allgemeine Lösung zu erhalten, noch die allgemeine Lösung
der homogenen Differentialgleichung addieren müsste. Dieser Term fällt aber wieder weg, wenn man davon
ausgeht, dass sich der Oszillator zum Zeitpunkt t = −∞ in der Ruhelage befunden hat, dass also gilt:
x(−∞) = v(−∞) = 0. Genau davon gehen wir hier und im Folgenden dieser Arbeit auch aus, um für
die verschiedenen Arten der Berechnung vergleichbare Ergebnisse zu erhalten. Im Kapitel 5 wird dieses
Ergebnis nochmals betrachtet und mit weiteren Resultaten verglichen.
2.2 Quantenmechanische Betrachtung
In diesem Abschnitt wird nun der gleiche harmonische Oszillator wie bisher betrachtet, nur dass er jetzt
als quantenmechanisches System ausgewertet wird. Dabei wird zuerst wieder der ungetriebene Fall, also
ein harmonischer Oszillator ohne äußere Kraft, betrachtet und dann die treibende Kraft aus Gleichung (2.9)
hinzugefügt um einen quantenmechanischen getriebenen harmonischen Oszillator zu erhalten.
10
Im Gegensatz zur klassischen Mechanik wird nun anstatt des zweiten newtonschen Gesetzes die Schrödingergleichung verwendet. Sie lautet in zeitabhängiger Form:
∂
|ψ(t)i = Ĥ|ψ(t)i
∂t
p̂2
mit Ĥ =
+ V( x̂)
2m
i~
(2.19)
Ähnlich wie schon das zweite newtonsche Gesetz beschreibt diese Gleichung wieder, wie sich ein System
bei gegebenem Anfangszustand verändert. Dieser Anfangszustand ist nun jedoch nicht durch Position x und
Geschwindigkeit v eines Massepunktes beschrieben, sondern durch den Zustandsvektor |ψ(t)i im Hilbertraum. Das Betragsquadrat dieses Zustandsvektor gibt die Wahrscheinlichkeit an, das beschriebene Teilchen
in einem bestimmten Gebiet der noch zu wählenden Basis zu finden. Da das Teilchen nicht verschwinden
kann, wird zusätzlich gefordert, dass der Zustandsvektor normiert ist:
hψ(t)|ψ(t)i = 1
für alle t
(2.20)
Die stationären (=zeitinvarianten) Zustände werden dabei durch die stationäre Schrödingergleichung beschrieben. Es handelt sich dabei um die Eigenwertgleichung des Hamiltonoperators:
Ĥ|ψn i = En |ψn i
(2.21)
Im Gegensatz zur zeitabhängigen Schrödingergleichung liefert diese Gleichung einen oder mehrere Zustandsvektoren, die sich, wenn man die zeitabhängige Schrödingergleichung darauf anwendet, nur in ihrer
Phase verändern. Da die Phase des Zustandes für das Betragsquadrat unbedeutend ist, ändern sich die Erwartungswerte nicht mit der Zeit, der Zustand ist stationär.
2.2.1 Ungetriebener Fall
Um die Eigenzustände des quantenmechanischen harmonischen Oszillators zu finden, müssen wir die stationäre Schrödingergleichung (2.21) mit dem Hamiltonoperator für das Potential des harmonischen Oszillators
(2.7) lösen. Dieser lautet wie folgt:
Ĥ =
p̂2
p̂2 1
+ V( x̂) =
+ mω20 x̂2
2m
2m 2
(2.22)
Dies ist zwar auch in der Ortsdarstellung möglich, jedoch in der Besetzungszahlbasis sehr viel einfacher
und eleganter. Dazu definiert man zuerst scheinbar willkürlich den Operator â und seinen Adjungierten ↠,
die sogenannten Leiteroperatoren:
r
mω0
i p̂
â :=
x̂ + √
„Vernichtungsoperator“
2~
2mω0 ~
r
mω0
i p̂
†
⇒ â =
x̂ − √
„Erzeugungsoperator“
(2.23)
2~
2mω0 ~
Zusätzlich definieren wir den Besetzungszahloperator N̂ und nennen seine Eigenwerte Nn :
N̂ := ↠â
„Besetzungszahloperator“
N̂|ψn i = Nn |ψn i
(2.24)
Mit der Relation [ p̂, x̂] = −i~ lässt sich der Kommutator [â,↠] berechnen und man kann den Hamiltonoperator (2.22) durch die Leiteroperatoren oder den Besetzungszahloperator ausdrücken:
h
i
â,↠= 1
(2.25)
!
!
1
1
Ĥ = ~ω0 ↠â +
= ~ω0 N̂ +
(2.26)
2
2
11
Setzt man dies in die stationäre Schrödingergleichung (2.21) ein, erhält man:
!
!
1
1
En |ψn i = Ĥ|ψn i = ~ω0 N̂ + |ψn i = ~ω0 Nn + |ψn i
2
2
(2.27)
und sieht, dass der Hamiltonoperator und der Besetzungszahloperator die gleichen Eigenzustände |ψn i haben
und, dass außerdem für die Eigenwerte gilt:
!
1
(2.28)
En = ~ω0 Nn +
2
Nun multipliziert man die Gleichung (2.27) von links mit â und erhält folgendes:
!
!
h
i!
1
1
†
†
†
âĤ|ψn i = ~ω0 â â â + |ψn i = ~ω0 â â + â + â,â â |ψn i =
2
2
| {z }
=â
!
1
~ω0 ↠â + + 1 â|ψn i = Ĥ + ~ω0 â|ψn i = En â|ψn i
2
⇒ Ĥ â|ψn i = (En − ~ω0 ) â|ψn i
(2.29)
Gleichung (2.29) besagt genau, dass â|ψn i der Eigenzustand zur Energie En − ~ω0 ist. Analog erhält man
für ↠|ψn i einen Eigenzustand zur Energie En + ~ω0 :
Ĥ ↠|ψn i = (En + ~ω0 ) ↠|ψn i
(2.30)
Dies erklärt nun die Namen von â und ↠: sie liefern aus einem Zustand einen Zustand mit einem Energiequant ~ω0 weniger bzw. mehr, sie vernichten bzw. erzeugen also ein Energiequant.
Eigenwerte
Da man den Vernichtungsoperator â beliebig oft auf |ψn i anwenden kann, die Energie des Zustandes En =
hψn |Ĥ|ψn i aber nie negativ werden kann, muss diese Folge irgendwann ein Ende finden. Für den Grundzustand, den man |ψ0 i nennt, gilt daher:
â|ψ0 i = 0
(2.31)
Multiplikation von links mit ↠liefert:
!
Ĥ
1
− |ψ0 i
⇒ 0 = â â|ψ0 i =
~ω0 2
~ω0
⇒ Ĥ|ψ0 i =
|ψ0 i = E0 |ψ0 i
2
†
Daraus ergibt sich die Energie des Grundzustandes E0 und aus ihr durch n-maliges Anwenden des Erzeugungsoperators auf den Grundzustand, d.h. mit Gleichung (2.30), die Energien aller weiteren Zustände:
E0 =
~ω0
2
1
En = ~ω0 n +
2
!
(2.32)
Zieht man nun noch Gleichung (2.28) hinzu, sieht man sofort, dass
Nn = n
(2.33)
gelten muss. Damit wird auch die Namensgebung des Besetzungszahloperators ersichtlich: er ordnet einem
Eigenzustand seine „Nummerierung“ zu.
12
Normierung
Diese Eigenzustände sind jedoch nicht normiert, was man korrigieren muss, um daraus den physikalischen
Zustand mit der nächstniedrigeren bzw. nächsthöheren Energie zu erhalten:
K|ψn−1 i = â|ψn i
1
Nn
n
!
⇒ 1 = hψn−1 |ψn−1 i = 2 hψn |↠â|ψn i = 2 hψn |ψn i = 2
K
K
K
√
⇒K= n
Die analoge Rechnung ergibt auch die Normierung für ↠. Es gilt also:
√
â|ψn i = n|ψn−1 i
√
↠|ψn i = n + 1|ψn+1 i
(2.34)
Eigenfunktionen in Ortsdarstellung
Aus Gleichung (2.31) kann man nicht nur die Energie des Grundzustandes erhalten, sondern auch den
Grundzustand in Ortsdarstellung. Dazu setzt man die Definition des Vernichtungsoperators (2.23) ein und
verwendet für den Impuls- und Ortsoperator deren Darstellung in Ortsbasis:
d
dx
x̂ = x
p̂ = −i~
(2.35)
Man erhält dadurch folgende Differentialgleichung:
s
r
mω
~
d
0
ψ (x) = 0
x
+
0
2~
2mω0 dx
(2.36)
Daraus ergibt sich mit Normierung:
ψ0 (x) =
mω 14
0
π~
mω 0 2
exp −
x
2~
(2.37)
Da man nun die Wellenfunktion des Grundzustandes ermittelt hat, kann man darauf nun den Erzeugungsoperator beliebig oft anwenden, und somit alle Zustände des quantenmechanischen harmonischen Oszillators
zu erzeugen:
s
r
n
1 mω0
~ d
ψn (x) = √
x+
(2.38)
ψ0 (x)
2~
2mω0 dx
n!
Betrachtet man diese Gleichung genauer, so fällt auf, dass es sich dabei fast genau um die Definition der
hermiteschen Polynome handelt. Diese sind definiert als:
!n
x2
x2
d
e− 2
(2.39)
Hn (x) = e 2 ξ −
dξ
q
0
Mit ξ = x mω
~ kann man die Wellenfunktionen ψn somit auch schreiben als:
ψn (x) =
mω 41
0
π~
1
Hn
√
2n n!
r
!
1 mω0 2
mω0
x e− 2 ~ x
~
(2.40)
13
Matrixdarstellung von â, ↠und N̂
Wir wissen aus den vorherigen Kapiteln, wie die Leiteroperatoren in der Ortsbasis aussehen. Wir benötigen aber, insbesondere für spätere numerische Berechnungen in der Besetzungszahlbasis des harmonischen
Oszillators in Kapitel 4, die Darstellungen dieser Operatoren in dieser Basis, also der Eigenbasis des Besetzungszahloperators N̂. Mit Gleichung (2.34) ergeben sich die Matrixdarstellungen indem man vor und hinter
P
dem Operator dein 1-Operator Iˆ = ∞
n=0 |ψn ihψn | einschiebt. Man erhält für den Vernichtungsoperator:
â =
∞
X
m,n=0
|ψm i hψm |â|ψn ihψn |
| {z }
=âmn
√
√
mit âmn = hψm |â|ψn i = nhψm |ψn−1 i = nδm,n−1
√
0
1 √
2 √
0
0
3
⇒ â =
. .
.
0
. .
.
Analog erhält man die Matrixdarstellung für den Erzeugungsoperator:
√
√
â†mn = hψm |↠|ψn i = n + 1hψm |ψn+1 i = n + 1δm,n+1
√0
1 √0
†
2
0
⇒ â =
√
3
0
. . . .
.
.
(2.41)
(2.42)
Um später den Hamiltonoperator in Besetzungszahlbasis auszudrücken, benötigen wir nun noch die Matrixdarstellung des Besetzungszahloperators. Dazu verwendet man einfach dessen Eigenwertgleichung:
N̂mn = hψm |N̂|ψn i = nhψm |ψn i = nδmn
0
1
N̂ =
2
. .
.
(2.43)
Außerdem kann man die Definitionen der Leiteroperatoren (2.23) auch nach Impuls- bzw. Ortsoperator
auflösen:
r
mω0 ~ p̂ = −i
â − â†
2
s
~ x̂ =
â + â†
(2.44)
2mω0
Man hat somit mit dem Hamiltonoperator (2.26) alle benötigten Operatoren in Matrixdarstellung zur Verfügung und kann in Besetzungszahlbasis rechnen.
2.2.2 Mit treibender Kraft
Die analytische Lösung der Eigenzustände des quantenmechanischen harmonischen Oszillators war schon
recht kompliziert und nicht ganz einfach zu erhalten. Es ist jedoch auch noch möglich, wie in [Mab07]
14
beschrieben, die Zeitentwicklung dieser Zustände unter dem Einfluss einer externen treibenden Kraft analytisch darzustellen. Dazu verwenden wir die Besetzungszahlbasis im Wechselwirkungsbild, d.h. wir teilen
den Hamiltonoperator in einen zeitunabhängigen Teil Ĥ0 und einen zeitabhängigen Teil auf. Der zeitunabhängige Teil ist dabei genau der Hamiltonoperator des ungetriebenen harmonischen Oszillators. Der zeitabhängige Teil ist durch das Potential der treibenden Kraft gegeben und da das Potential des harmonischen
Oszillators ohne externe Kraft schon in Ĥ0 steckt, werden wir in diesem Kapitel nur den zeitabhängigen
Teil mit V̂ bezeichnen. In Gleichung (2.8) haben wir bereits das zum getriebenen harmonischen Oszillator
gehörige Potential gegeben. Damit lautet der Hamiltonoperator wie folgt:
!
p̂2 1
1
2
Ĥ(t) =
+ mω0 x̂ −FS (t) x̂ = Ĥ0 + V̂(t) = ~ω0 N̂ +
+ V̂(t)
(2.45)
2m {z
2
2
|
} | {z }
=:Ĥ0
=:V̂(t)
Der Sinn der Betrachtung im Wechselwirkungsbild ist nun, die zeitliche Entwicklung, die durch Ĥ0 verursacht wird, in die zeitliche Abhängigkeit der verwendeten Operatoren zu packen und die zeitliche Entwicke(t) auszudrücken. Mit
lung, die durch V̂ verursacht wird, durch die zeitliche Abhängigkeit des Zustandes ψ
der Tilde über den Zuständen und Operatoren wird gekennzeichnet, dass es sich um jeweilige im Wechselwirkungsbild handelt. Man wählt also eine zeitlich veränderliche Basis und muss somit jeden Zustand und
jeden Operator in diese Basis umrechnen:
e(t)i = T̂ † (t,0)|ψ(t)i = exp i Ĥ0 t |ψ(t)i
|ψ
(2.46)
0
~
i
i
e = T̂ † (t,0)ÂT̂ 0 (t,0) = exp Ĥ0 t  exp − Ĥ0 t
(2.47)
A(t)
0
~
~
Somit sind nun auch die Operatoren zeitabhängig. T̂ 0 ist dabei der Zeitentwicklungsoperator des ungetriebenen harmonischen Oszillators, der einen Zustand vom Zeitpunkt t0 zum Zeitpunkt t entwickelt. Da Ĥ0
zeitunabhängig ist, ist er gegeben durch:
i
T̂ 0 (t,t0 ) = exp − Ĥ0 (t − t0 )
(2.48)
~
Dies wurde in den Gleichungen (2.46) und (2.47) schon verwendet.
Wir werden im Folgenden einen Ausdruck für den Zeitentwicklungsoperator im Wechselwirkungsbild
e
ei berechnen und dieser kann ins
T finden. Damit lässt sich dann der Zustand im Wechselwirkungsbild |ψ
Schrödingerbild zurückkonvertiert werden, womit wir die gesuchte Zeitentwicklung des quantenmechanischen getriebenen harmonischen Oszillators gefunden haben werden.
Zeitentwicklungsoperator
Der Zeitentwicklungsoperator im Wechselwirkungsbild Te ist formal gegeben durch:
"
!#
Z
i te 0 0
V(t )dt
Te(t,t0 ) = T̂ exp −
~ t0
(2.49)
e zu verschiedenen Zeiten nicht mit sich selbst kommit dem Zeitordnungsoperator T̂ . Dieser ist nötig, da V
mutiert. Er gleicht die, durch die Exponentialfunktion „verlorene“ Zeitordnung, wieder aus. Da sich damit
jedoch nicht rechnen lässt, brechen wir das Integral im Exponenten in infinitesimal kleine Stücke auseinander und exponentieren jedes Stück einzeln. Dazu definieren wir ein „Stück“ dieses Integrals als:
Z t0 +n
e 0 )dt0 mit := t − t0
en = − i
V
V(t
(2.50)
~ t0+(n−1)
N
Somit kann man Te schreiben als:
e
e
Te(t,t0 ) = lim eVN . . . eV1
N→∞
(2.51)
15
e zu verschiedenen Zeiten nicht mit sich selbst kommutiert. Man kann jedoch
Oben haben wir gesagt, dass V
e
verwenden, dass V mit dem Kommutator kommutiert, dass also gilt:
ii
h
h
e 0 ),V(t
e 00 ) = 0
e
V(t
(2.52)
V(t),
Dies werden wir später auch für die treibende Kraft nachweisen. Man wendet nun die, unter der Voraussetzung [Â,[Â, B̂]] = [ B̂,[Â, B̂]] = 0, geltende Baker-Campbell-Hausdorff-Formel
e eB̂ = eÂ+B̂+[Â,B̂]/2
(2.53)
mehrmals auf den Ausdruck (2.51) an:
h
i
e
e e e e
e
e e e e e e
Te(t,t0 ) = lim eVN . . . eV4 eV3 eV2 eV1 = lim eVN . . . eV4 eV3 eV2 +V1 + V2 ,V1 /2 =
N→∞
= lim e
N→∞
eN
V
= lim e
N→∞
eN
V
N→∞
h
h
i i
e3 +V
e2 +V
e1 + V
e3 ,V
e2 +V
e1 + V
e2 ,V
e1 /2 /2
e4 V
V
...e e
. . . eV4 e
e
=
i i
h
i
h h
e2 ,V
e1 /2 /2
e3 ,V
e2 +V
e1 /2+ V
e3 , V
e3 +V
e2 +V
e1 + V
V
|
h
i
{z
=0
h
}=
h
i i
= lim eVN . . . eV4 +V3 +V2 +V1 + V3 ,V2 +V1 /2+ V4 ,V3 +V2 +V1 + V3 ,V2 +V1 /2 /2 =
e
e
N→∞
eN
V
= lim e
N→∞
e
e
e
e e
h
e
i
e e
e
h
e
i
e e
h
e
h
e e e
i i
2 +V1 /2 /2
. . . eV4 +V3 +V2 +V1 + V3 ,V2 +V1 /2+ V4 ,V3 +V2 +V1 /2+|V4 , V3 ,V{z
}=
=0
N
"
#!
X
n
P
1
en + V
en , V
ek
= . . . = lim exp
V
N→∞
2
k=1
n=1
e
e
e
e
e e
e
e e
e
e
e
Die zweite Summe kann man nun aus dem Kommutator herausziehen und den Limes ausführen. Dadurch
erhält man den finalen, allgemeinen Ausdruck für den Zeitentwicklungsoperator unter der Annahme, dass
Gleichung (2.52) gilt:
Z
Z t Z t0 h
i
i t
1
0
0
0
00
00
0
e
e
e
e
T (t,t0 ) = exp −
V(t )dt − 2
V(t )V(t ) dt dt
(2.54)
~ t0
2~ t0 t0
e keine Aussagen getroffen, außer, dass es mit seinem eigenen KomBisher haben wir über das Potential V
mutator kommutieren muss um auf den Ausdruck (2.54) zu kommen. Wenn wir nun das Potential (2.45)
verwenden, dann können wir Te weiter spezifizieren. Wir verwenden also:
s
~
FS (t) â + â†
V̂(t) = −FS (t) x̂ = −
(2.55)
2mω0
e mit Gleichung (2.47):
Somit ergibt sich für das Potential im Wechselwirkungsbild V
s
i
i
~
e =−
exp Ĥ0 t FS (t) â + ↠exp − Ĥ0 t =
V(t)
2mω0
~
~
s
~
=−
FS (t) exp iω0 ↠ât â + ↠exp −iω0 ↠ât =
2mω0
s
~
=−
FS (t) âe−iω0 t + ↠eiω0 t
2mω0
(2.56)
Dabei wurde, um auf die dritte Zeile zu kommen, folgende Relation verwendet. Diese wird im Anhang A.2
hergeleitet.
h
i
exp X̂ Ŷ exp −X̂ = eµ Ŷ für X̂,Ŷ = µŶ
(2.57)
h
i
h
i
↠â,â = −â ⇒ µ = −iω0 t bzw. ↠â,↠= ↠⇒ µ = iω0 t
16
e mit sich selbst, den wir unter anderem
Der Ausdruck 2.56 ist ausreichend um nun den Kommutator von V
im Ausdruck für den Zeitentwicklungsoperator (2.54) verwendet haben, zu berechnen:
h
=
h
0
0
00
00 i
~
FS (t0 )FS (t00 ) âe−iω0 t + ↠eiω0 t ,âe−iω0 t + ↠eiω0 t =
2mω0
0 h
00
00 i
0 h
00
00 i
FS (t0 )FS (t00 ) e−iω0 t â,âe−iω0 t + ↠eiω0 t + eiω0 t ↠,âe−iω0 t + ↠eiω0 t =
i
e 0 ),V(t
e 00 ) =
V(t
~
2mω0
=
i
i
0
00 h
0
00 h
~
FS (t0 )FS (t00 ) e−iω0 t +iω0 t â,↠+ eiω0 t −iω0 t ↠,â =
2mω0
|{z}
|{z}
=1
=−1
~
0
00
−iω0 (t0 −t00 )
iω0 (t0 −t00 )
FS (t )FS (t ) e
−e
=
=
2mω0
!
1 ix
mit sin x =
e − e−ix
2i
i~
FS (t0 )FS (t00 ) sin ω0 (t0 − t00 )
=−
2mω0
(2.58)
e mit sich selbst zu verschiedenen Zeiten immer eine komplexe Zahl. Eine
Somit ist der Kommutator von V
e selbst, und somit ist Gleikomplexe Zahl kommutiert aber mit jedem Operator, insbesondere auch mit V
chung (2.52) für eine treibende Kraft mit einem Potential der Form (2.55) bestätigt. Außerdem kann das
Doppelintegral im Zeitentwicklungsoperator (2.54) über genau diese komplexe Zahl nun, mit gegebenem
FS , direkt ausgerechnet werden. Wir geben diesem Integral (bis auf einen Faktor i) zur Vereinfachung der
Notation den Namen β:
Z t Z t0 h
i
i
e 0 )V(t
e 00 ) dt00 dt0 =
β(t,t0 ) := − 2
V(t
2~ t0 t0
Z t Z t0
1
=
FS (t0 )FS (t00 ) sin ω0 (t0 − t00 ) dt00 dt0
2mω0 ~ t0 t0
(2.59)
Um auch das erste Integral in (2.54) kürzer schreiben zu können, definieren wir uns zusätzlich ζ als:
Z t
0
i
FS (t0 )eiω0 t dt0
(2.60)
ζ(t,t0 ) := √
2mω0 ~ t0
Auch dieses Integral ist mit einem gegebenen FS einfach auszurechnen. Nun setzt man das Potential (2.56),
β und ζ in den Zeitentwicklungsoperator ein und erhält:
r
Z t
0
0
1
0
−iω
t
†
iω
t
0
0
0
0
Te(t,t0 ) = exp i
FS (t ) âe
+ â e
dt + iβ(t,t ) =
2mω0 ~ t0
r
r
Z
Z t
t
0
0
1
1
iβ(t,t0 )
0
−iω
t
0
0
iω
t
0
FS (t )e 0 dt â + i
FS (t )e 0 dt ↠=
=e
exp i
2mω0 ~ t0
2mω0 ~ t0
|
{z
}
|
{z
}
=−ζ ∗ (t,t0 )
=ζ(t,t0 )
= eiβ(t,t0 ) exp ζ(t,t0 )↠− ζ ∗ (t,t0 )â
Dieses Ergebnis kann nun mit dem Verschiebungsoperator D̂ nochmals kürzer ausgedrüct werden:
D̂(α) := exp α↠− α∗ â
Te(t,t0 ) = eiβt,t0 D̂(ζ(t,t0 ))
(2.61)
(2.62)
Bisher haben wir im Wechselwirkungsbild gerechnet. Wir wollen nun den Zeitentwicklungsoperator im
Schrödingerbild erhalten und führen dafür die umgekehrte Basistransformation wie in Gleichung (2.47)
17
durch:
i
i
T̂ (t,t0 ) = exp − Ĥ0 t Te(t,t0 ) exp Ĥ0 t0 =
~
~
i
i
i
= eiβ(t,t0 ) exp − Ĥ0 t D̂(ζ(t,t0 )) exp Ĥ0 t exp − Ĥ(t − t0 ) =
~
~
~
i
iβ(t,t0 )
−iω0 t
=e
D̂(ζ(t,t0 )e
) exp − Ĥ0 (t − t0 ) =
~
iβ(t,t0 )
−iω0 t
=e
D̂(ζ(t,t0 )e
)T̂ 0 (t,t0 )
(2.63)
Der Schritt von der zweiten Zeile zur dritten ist hier nicht ganz trivial. Um den Phasenfaktor im Argument
des Verschiebungsoperators zu erhalten, muss man die Exponentialfunktion im Verschiebungsoperator als
Potenzreihe schreiben und die Formel (2.57) aus Anhang A.2 für jeden Faktor â und ↠verwenden.
Zustand
Wir haben mit Gleichung (2.63) nun einen Ausdruck für den Zeitentwicklungsoperator im Schrödingerbild erhalten. Mit diesem können wir einen beliebigen Anfangszustand nun unter einer treibenden Kraft
FS zeitlich entwickeln. Damit können wir exakt beschreiben, wie sich der quantenmechanische getriebene
harmonische Oszillator verhält.
Wie schon in Kapitel 2.1.2 gehen wir auch hier wieder davon aus, dass sich der Oszillator zum Zeitpunkt
t0 = −∞ in der Ruhelage, also dem Grundzustand |ψ0 i befindet. Auf diesen Grundzustand wenden wir nun
den im letzten Kapitel berechneten Zeitentwicklungsoperator an:
|ψ(t)i = T̂ (t,t0 )|ψ0 i = eiβ(t,t0 ) D̂(ζ(t,t0 )e−iω0 t )T̂ 0 (t,t0 )|ψ0 i =
| {z }
=:α
i
iβ(t,t0 )
†
∗
=e
exp αâ − α â e− 2 ω0 t |ψ0 i =
h
i
h
i
mit eÂ+B̂ = e eB̂ e−[Â,B̂]/2 und α↠, − α∗ â = −|α|2 ↠,â = |α|2
0 ) − 2 ω0 t −|α|
=|
e−iβ(t,t{z
e }e
2 /2
i
exp α↠exp −α∗ â |ψ0 i =
=:φ(t,t0 )
2 /2
= φ(t,t0 )e−|α|
∞
X
(−α∗ )n n
exp αâ†
â |ψ0 i =
n! |{z}
n=0
=0 für n>0
|
{z
}
=|ψ0 i
2 /2
= φ(t,t0 )e−|α|
∞
X
2
αn † n
exp α↠|ψ0 i = φ(t,t0 )e−|α| /2
â |ψn i =
n!
n=0
√
∞
X
αn n!
−|α|2 /2
|ψn i =
= φ(t,t0 )e
n!
n=0
= e−iβ(t,t0 ) e− 2 ω0 t e−|α(t)|
i
2 /2
∞
X
αn (t)
√ |ψn i mit α(t) := ζ(t,t0 )eiω0 t
n!
n=0
(2.64)
Damit haben wir nun eine vollständige Formel für den Zustand des quantenmechanischen getriebenen harmonischen Oszillators zur Zeit t gefunden. Es handelt sich dabei im wesentlichen um eine Spektraldarstellung, d.h. um eine gewichtete Summe der Eigenzustände des ungetriebenen Oszillators |ψn i mit einem
zusätzlichen Phasenfaktor. Auch dieses Ergebnis werden wir in Kapitel 5 erneut betrachten. Einmal, um es
mit den restlichen Ergebnissen, wie z.B. dem klassischen zu vergleichen. Da es sich hierbei um die exakte
Lösung eines quantenmechanischen Problems handelt, können wir unsere numerischen Ergebnisse später
nicht nur auf Plausibilität überprüfen, sondern auch feststellen, wie genau diese sind.
Setzt man nun FS in ζ(t,t0 ) ein, so kann man α(t) in Abhängigkeit von t berechnen und erhält damit den
Zustand zu einem gegebenen Zeitpunkt t. Es handelt sich bei dem Integral in ζ(t,t0 ) fast um das gleiche
18
Integral, das für den klassischen Ort (2.16) berechnet werden musste. Der einzige Unterschied ist, dass hier
anstatt dem Sinus eine komplexe Exponentialfunktion auftaucht. Wir werden darauf aber in Kapitel 2.2.2
nochmals zu sprechen kommen. Man erhält für t < tS :
iAS eB(t−tS ) ωS sin(ωS t) + (B + iω0 ) cos(ωS t)
α(t) = √
ω2S + (B + iω0 )2
2~mω0
(2.65)
Und für t > tS :
2Beiω0 tS B2 + ω2 + ω2 cos(ωS tS ) − 2iω0 ωS sin(ωS tS )
iAS
0
S
α(t) = √
+
2
2~mω0
B2 + ω20 + 2ω2S B2 − ω20 + ω4S
e−iω0 t
eB(tS −t)+iω0 t (ωS sin(ωS t) − (B − iω0 ) cos(ωS t))
+
2
2
ωS + (B − iω0 )
(2.66)
Sieht man sich die Gewichtung der Eigenzustände genauer an, so fällt noch auf, dass es sich dabei um
eine Poissonverteilung handelt. Diese ist definiert als:
Pλ (k) =
λk −λ
e
k!
und die Wahrscheinlichkeit, das System zum Zeitpunkt t im Zustand |ψk i zu finden lautet:
2
2 ∞
∞
n
n
X
X
2
2
a
a
|hψk |ψ(t)i|2 = hψk |e−|α| /2
√ |ψn i = e−|α| /2
√ hψk |ψn i =
n!
n! | {z }
n=0
n=0
=δkn
2
2k
−|α|2 /2 αk 2
|α|
= e
= P|α|2 (k)
√ = e−|α|
k!
k! (2.67)
(2.68)
Erwartungswerte
Da es sich der berechneten Zeitentwicklung immer um kohärente Zustände handelt, erhält man, wie in
[Fli08, S. 259] beschrieben, für den Orts- bzw. Impulserwartungswert:
|ψ(t)i = D̂(α(t))|ψ0 i mit α(t) = ζ(t,t0 )e−iω0 t
s
Z t
~
1
Re(α(t)) =
h x̂i(t) = hψ(t)| x̂|ψ(t)i = 2
FS (t0 ) sin(ω0 (t − t0 ))dt0
2mω0
mω0 t0
r
Z t
mω0 ~
Im(α(t)) =
FS (t0 ) cos(ω0 (t0 − t))
h p̂i(t) = hψ(t)| p̂|ψ(t)i = −2i
2
t0
(2.69)
Das entspricht für h x̂i(t) exakt der in Kapitel 2.1.2 berechneten klassischen Zeitentwicklung des Ortes (2.16).
Damit ist auch geklärt, warum das Integral in α(t) dem in der klassischen Lösung vorkommenden Integral
entspricht. Die Äquivalenz von quantenmechanischem Erwartungswert und klassischer Zeitentwicklung war
nach dem Ehrenfest-Theorem zu erwarten, konnte aber somit für den harmonischen Oszillator explizit bestätigt werden. Sieht man sich die Formel des Ehrenfest-Theorems (siehe [Fli08, S. 107]) genauer an, so
wird deutlich, warum die Formeln hier exakt übereinstimmen.
m
d2 h x̂i
= −hgradV(t, x̂)i
|
{z
}
dt2
(2.70)
=hF(t, x̂)i
Für eine Kraft, die linear in x̂ ist, gilt aber zusätzlich für den Mittelwert der Kraft:
hF(t, x̂)i = F(t,h x̂i)
(2.71)
19
Beim getriebenen harmonischen Oszillator ist dies erfüllt. Aus (2.71) erhält man mit dem Ehrenfest-Theorem
(2.70) die newtonsche Bewegungsgleichung (2.1) für den Ortserwartungswert:
m
d2 h x̂i
= F(t,h x̂i)
dt2
(2.72)
Somit folgen die klassische Zeitentwicklung x(t) und der quantenmechanische Ortserwartungswert h x̂i(t)
der gleichen Dynamik. Sie müssen also bei gleichen Anfangswerten für jeden Zeitpunkt übereinstimmen.
Für den anharmonischen Oszillator wird Gleichung (2.71) nicht mehr erfüllt sein und somit werden auch die
klassische Zeitentwicklung und der quantenmechanische Ortserwartungswert nicht mehr übereinstimmen.
2.2.3 Störungstheorie
Bisher waren alle unsere Rechnungen unter den gemachten Annahmen exakt. Steht man jedoch vor einem
Problem, das sich analytisch nicht mehr exakt lösen lässt, so könnte man versuchen dieses numerisch mit
dem Computer zu lösen. Dies funktioniert in der Regel auch, hat aber nicht nur Vorteile: so sind z.B. die
Ausgangsparameter einer berechneten Lösung immer fest und um die Abhängigkeit dieser Parameter zu
bestimmen, muss man die Berechnung für sehr viele Werte dieser Parameter wiederholen. Das kann sehr
viel (Rechen-)Zeit in Anspruch nehmen. Bevor man sozusagen mit dem Vorschlaghammer auf das Problem
losgeht, kann man aber noch eine andere Methode verwenden und zwar die Störungstheorie oder auch
Störungsrechnung. Der Begriff „Störung“ steht dabei für eine Änderung eines analytisch lösbaren Systems,
in unserem Fall ist dies der ungetriebene harmonische Oszillator. Diese Störung kann entweder zeitabhängig
oder -unabhängig sein. Wenn diese Störung klein genug im Vergleich zum ungestörten System ist, kann man
die Näherungsmethoden der Störungstheorie anwenden und erhält analytische Ergebnisse, die die exakte
Lösung annähern. In unserem Fall handelt es sich bei der Störung um die treibende Kraft.
In diesem Kapitel werde ich nun zuerst die allgemeine Formel für die Spektralkoeffizienten in zeitabhängiger Störungstheorie herleiten, um dann im Folgenden diese Formel auf den getriebenen harmonischen
Oszillator anzuwenden.
Herleitung
Wir teilen, wie schon zuvor in Gleichung (2.45) den Hamiltonoperator in einen zeitlich konstanten Anteil
Ĥ0 und einen zeitabhängigen Teil V̂(t) auf, jedoch mit dem Unterschied, dass wir den zeitabhängigen Teil
nun mit einem Parameter λ skalieren. Dies ermöglicht es uns später nach Potenzen dieses Parameters zu
entwickeln.
Ĥ(t) = Ĥ0 + λV̂(t)
(2.73)
Einen Zustand |ψ(t)i des Systems kann man zu jedem Zeitpunkt durch eine Linearkombination der Eigenzustände des ungestörten Systems darstellen:
|ψ(t)i =
∞
X
n=0
cn (t)T̂ (t,t0 )|ψn i =
∞
X
i
cn (t)e− ~ En t |ψn i
(2.74)
n=0
Damit lautet die zeitabhängige Schrödingergleichung (2.19) nun:
∞
∞
X
i
i
∂ X
cn (t)e− ~ En t |ψn i = Ĥ0 + λV̂(t)
cn (t)e− ~ En t |ψn i
∂t n=0
n=0
!
∞
∞ X
X
i
i
dcn (t)
⇒
i~
+ En cn (t) e− ~ En t |ψn i =
En + λV̂(t) cn (t)e− ~ En t |ψn i
dt
n=0
n=0
i~
20
(2.75)
Diese Gleichung kann man auf einen Eigenzustand |ψm i projizieren:
!
∞
∞ X
X
i
i
dcn (t)
+ En cn (t) e− ~ En t |ψn i = hψm |
hψm |
i~
En + λV̂(t) cn (t)e− ~ En t |ψn i
dt
n=0
n=0
!
∞
∞
∞
X
X
X
i
i
i
dcn (t)
⇒
i~
+ En cn (t) e− ~ En t hψm |ψn i =
En cn (t)e− ~ En t hψm |ψn i +λ hψm |V̂(t)cn (t)e− ~ En t |ψn i
| {z }
| {z }
dt
n=0
n=0
=δmn
⇒ i~
=δmn
∞
X
n=0
i
dcm (t) − i Em t
− ~i Em t
− ~i Em t
e ~
+
Em
cm(t)e
=
Em
cm(t)e
+λ
cn (t)e− ~ En t hψm |V̂(t)|ψn i
dt
n=0
⇒ i~
∞
X
i
dcm (t)
=λ
cn (t)e ~ (Em −En )t hψm |V̂(t)|ψn i
dt
n=0
(2.76)
Nun wird die bereits erwähnte Entwicklung nach Potenzen von λ durchgeführt, d.h. man schreibt cm (t) als:
(1)
2 (2)
cm (t) = c(0)
m (t) + λcm (t) + λ cm (t) + . . .
(2.77)
Würde man diese unendliche Reihe nicht abbrechen, erhielte man immer noch das exakte Ergebnis und
zwar für jedes λ. Dabei ist zu beachten, dass die c(i)
m nicht von λ abhängen. Um später das gesuchte cm (t)
zu erhalten berechnet man diese und setzt λ = 1. Störungstheorie n-ter Ordnung bedeutet nun, dass alle
(i)
Terme cm
(t) mit i > n genügend klein sind, um sie zu vernachlässigen. Somit erhält man, indem man die
Entwicklung des Zustandes (2.77) in Gleichung (2.76) einsetzt, in nullter Ordnung:
∞
X
dc(0)
m (t)
i~
=λ
c(0)
n . . . = 0 + O(λ)
dt
n=0
⇒ c(0)
m (t) = cm (t0 )
(2.78)
Das bedeutet, dass sich das System in Störungstheorie nullter Ordnung nicht verändert, es bleibt also in
P
− ~i En t
seinem Anfangszustand |ψ(t)i = ∞
|ψn i. Dies war auch zu erwarten wenn man sich die Entn=0 cn (t0 )e
wicklung des Zustandes (2.77) mit einer nicht-existenten Störung, also für λ = 0, ansieht. Somit ergibt
die Störungstheorie in nullter Ordnung genau das ungestörte System. Als nächstes betrachtet man die erste
Ordnung und integriert:
∞
X
i
dc(0)
dc(1)
m (t)
m (t)
(Em −En )t
i~
hψm |V̂(t)|ψn i + O(λ2 )
+i~λ
=λ
c(0)
n e~
dt
dt
| {z }
n=0
=0
∞
⇒
c(1)
m (t)
iX
=−
~ n=0
Z
t
i
0
(Em −En )t
c(0)
hψm |V̂(t0 )|ψn idt0
n (t0 )e ~
(2.79)
t0
Der Term O(λ2 ) in obiger Formel gibt eine Abschätzung für den Fehler an: dieser ist also proportional zu
(2)
λ2 . Aus c(1)
m (t) könnte man nun durch erneutes Einsetzen in Gleichung (2.76) einen Ausdruck für cm und
damit Störungstheorie in zweiter Ordnung erhalten. Dies lässt sich beliebig fortführen und man erhält so
immer höhere Ordnungen und damit genauere Lösungen. Wir werden uns im Folgenden aber auf die erste
Ordnung beschränken.
Anwendung
Wir haben im letzten Kapitel eine Näherung für die Zeitentwicklung eines quantenmechanischen Systems
hergeleitet und werden diese nun auf den getriebenen harmonischen Oszillator anwenden. Wie auch schon
in den vorherigen Kapiteln, gehen wir wieder davon aus, dass sich der Oszillator zum Zeitpunkt t0 im
Grundzustand |ψ0 befindet. Somit gilt:
1 für m = 0
(0)
cm (t0 ) =
(2.80)
0 sonst
21
Außerdem verwenden wir auch hier wieder das Potential (2.55), also die gleiche treibende Kraft FS (t)
wie in den vorherigen Kapiteln. Nun sieht man sich Gleichung (2.79) nochmals an: es taucht darin das
Matrixelement V̂mn (t) = hψm |V̂(t)|ψn i auf. Durch Gleichung (2.80) ist n somit auf 0 festgelegt. An der
Matrixdarstellung des Erzeugungs- (2.42) und des Vernichtungsoperators (2.43) sieht man, dass V̂mn für
n = 0 nur für m = 1 einen Wert liefert und zwar:
s
~
V̂10 (t) = −
FS (t)
(2.81)
2mω0
In Störungstheorie erster Ordnung erhält man also ausschließlich eine Änderung der Besetzungswahrscheinlichkeit des ersten Zustandes über dem Grundzustand und der Grundzustand geht weiterhin mit dem Faktor
1 ein. Somit ist die Normierung des Zustandes in dieser Näherung nicht erhalten. Trotzdem ergeben sich für
c1 (t) plausible Werte. Der Zustand ist gegeben durch:
|ψ(t)i = e− 2 ω0 t |ψ0 i + e− 2 ω0 t c(1)
1 (t)|ψ1 i
Z t
Z t
0
i
i
iω0 t0
0
0
mit c(1)
(t)
=
−
e
V̂
(t
)dt
=
FS (t0 )eiω0 t dt0
√
10
1
~ t0
2mω0 ~ t0
i
3i
(2.82)
Es fällt noch auf, dass c(1)
1 (t) genau dem Integral ζ(t,t0 ) (2.60) aus Kapitel 2.2.2 entspricht. Wie gut diese Näherung zu den exakten Ergebnissen aus Kapitel 2.2.2 passen, werden wir in Kapitel 5 untersuchen.
Insbesondere werden wir betrachten, für welche Bereiche der Anregungsamplitude AS und der Anregungsfrequenz ωS sich noch plausible Werte ergeben.
22
3 Anharmonischer Oszillator
Im Allgemeinen bezeichnet man jeden Oszillator, dessen Rückstellkraft nicht direkt proportional zur Auslenkung ist, als anharmonisch. Ein anharmonisches Potential ist somit im Gegensatz zum harmonischen
Potential (2.7) nicht nur durch Terme mit x2 beschrieben, sondern es kommen noch andere Potenzen vor.
Da jedes analytische Potential als Taylorreihe geschrieben werden kann, genügt die Beschreibung mit Potenzen, um jede Potentialform abzudecken. Wir werden uns in dieser Bachelorarbeit auf einen zusätzlichen
Term mit x4 beschränken. Auch in diesem scheinbar einfachen Fall ist der anharmonische Oszillator schon
nicht mehr analytisch exakt lösbar. Das Potential des anharmonischen Oszillators wird also folgendermaßen
festgelegt:
1
V(x) = mω20 x2 + Ax4
2
A
dV(x)
⇒ F(x) = −
= − mω20 x − x3
dx
4
|{z}
(3.1)
=k
Dabei ist A ein Faktor, der die Stärke der Anharmonizität angibt und sowohl positiv als auch negativ sein
kann. Auf Effekte, die bei negativem A auftreten, werden wir in Kapitel 5 noch genauer eingehen. Für positives A nimmt die Rückstellkraft mit größer werdendem Abstand stärker zu als beim harmonischen Oszillator,
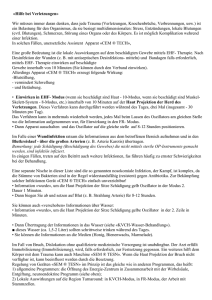
für negatives A schwächer, bis sie irgendwann repulsiv wirkt. In Abbildung 3.1 sind die unterschiedlichen
Fälle dargestellt. Wie man im untersten Bild sieht, könnte man den quadratischen Term auch explizit negativ verwenden und erhält daraus mit positivem A ein Doppelmuldenpotential, also ein Potential mit zwei
Minima. Dies soll aber nicht Gegenstand dieser Arbeit sein.
23
1 2
2x
0,4
0,2
0
−1
−0,8
−0,6
−0,4
−0,2
1,5
0
x
1 2
2x
0,2
0,4
0,6
0,8
1
0,2
0,4
0,6
0,8
1
0,2
0,4
0,6
0,8
1
0,2
0,4
0,6
0,8
1
+ x4
1
0,5
0
−1
−0,8
−0,6
−0,4
−0,2
0
x
0,1
1 2
2x
− x4
0,05
0
−1
−0,8
−0,6
−0,4
−0,2
0
x
− 12 x2 + x4
0,4
0,2
0
−1
−0,8
−0,6
−0,4
−0,2
0
x
Abbildung 3.1: Verschiedene Potentiale (von oben nach unten): harmonisch A = 0, anharmonisch A = 1,
anharmonisch A = −1 und Doppelmuldenpotential mit A = 1
24
3.1 Quantenmechanische Störungstheorie
Wir werden nun den anharmonischen Oszillator in quantenmechanischer Störungstheorie behandeln. Mit
geändertem V( x̂) ändert sich im Vergleich zu (2.22) auch der zeitunabhängige Teil des Hamiltonoperators
und die Berechnungen aus Kapitel 2.2.1 stimmen nicht mehr. Insbesondere ändern sich die Eigenenergien
und die Eigenfunktionen. Ähnlich wie in Kapitel 2.2.3 kann man nun den Term A x̂4 als Störung betrachten
und zeitunabhängige Störungstheorie verwenden, um aus den bekannten Eigenenergien und Eigenfunktionen des harmonischen Oszillators Korrekturen zu berechnen.
Herleitung
Die Strategie bei der zeitunabhängigen Störungstheorie ist recht ähnlich der zeitabhängigen Störungstheorie
mit dem wesentlichen Unterschied, dass man nicht die Zeitentwicklung eines bekannten Anfangszustandes
sucht, sondern die Änderung der Eigenenergien und Eigenzustände selbst. Die Störung wird wieder mit
einem Faktor λ skaliert. Nun wird allerdings die zeitunabhängige Schrödingergleichung (2.21), also die
Eigenwertgleichung des Hamiltonoperators verwendet:
Ĥ = Ĥ0 + λV̂
Ĥ|φn i = Ĥ0 + λV̂ |φn i = n |φn i
(3.2)
Analog zum zeitabhängigen Fall ist Ĥ0 der Hamiltonoperator des ungestörten Systems, in unserem Fall der
des harmonischen Oszillators, und V̂ die Störung, also der Term A x̂4 . Nun werden sowohl die Eigenenergien
n als auch die Eigenzustände |φn i nach λ entwickelt:
n = n(0) + λn(1) + λ2 n(2) + . . .
(1)
2 (2)
|φn i = |φ(0)
n i + λ|φn i + λ |φn i + . . .
(3.3)
Die gesuchten Eigenenergien und Eigenzustände des gestörten Systems ergeben sich nach Berechnung der
Korrekturen wieder mit λ = 1. Man erhält die Korrekturen, analog zur zeitabhängigen Störungstheorie
wieder, indem man die Ordnungen nacheinander in die verwendete Schrödingergleichung einsetzt, also hier
in (3.2). In nullter Ordnung ergibt sich:
(0 (0)
Ĥ0 + λV̂ |φ(0)
n i = n |φn i + O(λ)
(0) (0)
⇒ Ĥ0 |φ(0)
n i = n |φn i
(3.4)
Dies ist genau die ungestörte zeitunabhängige Schrödingergleichung. Damit ist der erste Term der Eigenenergie n(0) genau durch die Eigenenergie En des ungestörten Systems und der erste Term des Eigenzustandes |φ(0)
n i durch den Eigenzustand |ψn i des ungestörten Systems gegeben. Das ist wieder konsistent mit dem
Fall λ = 0.
n(0) = En
|φ(0)
n i = |ψn i
(3.5)
In erster Ordnung erhält man:
(1)
(1)
Ĥ0 + λV̂ |ψn i + λ|φ(1)
i
=
E
+
λ
|ψ
i
+
λ|φ
i
+ O(λ2 )
n
n
n
n
n
i + λE |φ(1) i + λ (1) |ψ i + O(λ2 )
⇒
Ĥ |ψ
i +λĤ0 |φ(1)
En
|ψ
n
n n
n
n i + λV̂|ψn i = n
| 0{zn}
=En |ψn i
(1)
(1)
⇒ Ĥ0 |φ(1)
n i + V̂|ψn i = E n |φn i + n |ψn i
(3.6)
Dies lässt sich wieder beliebig fortführen, um nacheinander immer höhere Ordnungen zu erhalten. Wir
beschränken uns auf die erste Ordnung. Nun stellen wir die Zustandskorrektur erster Ordnung durch die
25
Eigenzustände |ψn i des ungestörten Systems dar und projizieren Gleichung (3.6) auf einen Eigenzustand
|ψk i des ungestörten Systems:
|φ(1)
n i=
∞
X
anm |ψn i
m=0
⇒
∞ ∞
X
X
anm Ĥ0 |ψm i + V̂|ψn i = En
anm |ψm i + n(1) |ψn i
| {z }
m=0
⇒
m=0
=Em |ψm i
∞
X
(En − Em )anm |ψm i + n(1) |ψn i = V̂|ψn i
m=0
⇒
∞
X
(En − Em )anm hψk |ψm i +n(1) hψk |ψn i = hψk |V̂|ψn i
| {z }
| {z }
m=0
=δkn
=δkm
⇒ (En − Ek )ank +
n(1) δkn
= hψk |V̂|ψn i
(3.7)
Dies gilt für alle k und man erhält daraus:
k = n ⇒ (En − En ) ann + n(1) = hψn |V̂ψn i
| {z }
=0
k , n ⇒ (En − Ek )ank = hψk |V̂|ψn i
Somit sind die Korrektur erster Ordnung der Energie n(1) und alle ank bis auf ann bestimmt. Aus der Normierung des Zustandes |φn i kann man folgern, dass ann = 0 gelten muss. Siehe dazu [Fli08, S. 297]. Somit
ist die Korrektur erster Ordnung gegeben durch:
n(1) = hψn |V̂|ψn i
∞
X
hψm |V̂|ψn i
(1)
|φn i =
|ψm i
m=0 E n − E m
(3.8)
m,n
Anwendung
Wir setzen nun V̂ = A x̂4 in die störungstheoretische Korrektur der Eigenwerte und Eigenfunktionen (3.8).
4 . In Kapitel 2.2.1 haben mit (2.44) bereits
Dazu benötigen wir die Matrixelemente von hψm |V̂|ψn i = A x̂mn
die Matrixdarstellung von x̂ bestimmt:
√
0
1 √
√
s
s
1 0
2
√
~ ~
...
x̂ =
(3.9)
â + ↠=
2
0
2mω0
2mω0
√
.
.
..
..
N−1
√
N−1
0
Diese Matrix quadrieren wir einfach zwei mal und erhalten somit die Matrixdarstellung von x̂4 . Dies wurde
in Anhang A.3 durchgeführt. Somit kann man die Energieeigenwerte n des anharmonischen Oszillators
(3.1) in Störungstheorie erster Ordnung berechnen. Die Energie des Grundzustandes 0 lautet:
0 = E 0 +
26
4
A x̂00
~
= E0 + A
2mω0
!2
~
α(0) = E0 + 3A
2mω0
!2
(3.10)
Auch die Eigenzustände lassen sich berechnen und für den Grundzustand ergibt sich in erster Ordnung
Störungstheorie:
∞
4
4
X
x̂20
x̂40
V̂m,0
|φ0 i = |ψ0 i +
|ψm i = |ψ0 i + A
|ψ2 i +
|ψ4 i =
E − Em
E0 − E2
E0 − E4
m=1 0
!
!2
β(0)
γ(0)
~
|ψ2 i +
|ψ4 i =
= |ψ0 i − A
2mω0
2~ω0
4~ω0
√
√
2 A~
6 A~
= |ψ0 i − 3
|ψ2 i −
|ψ4 i
(3.11)
3
4 mω0
8 mω30
Wir haben also nun den Grundzustand des anharmonischen Oszialltors |φ0 i in der Eigenbasis des harmonischen Oszillators |ψn i berechnet. Da wir die Matrixdarstellungen aller wichtigen Operatoren in der Eigenbasis des harmonischen Oszillators schon berechnet haben, können wir nun |φ0 i in zeitabhängiger Störungstheorie behandeln. Wir setzen also |φ0 i und das zeitabhängige Potential V̂(t) = A x̂4 + FS (t) x̂ in (2.79)
ein. Zu der Integration kommt dabei mit A x̂4 nur ein zeitlich konstanter Term hinzu. Somit erhalten wir die
Zeitentwicklung des anharmonischen Oszillators.
27
4 Numerische Behandlung
In den vorherigen Kapiteln haben wir entweder versucht, durch möglichst geschickte Rechnung ein klassisches oder quantenmechanisches Problem in eine lösbare Form zu bringen, oder, wenn dies nicht möglich
war, durch eine geeignete Näherung in Störungstheorie dennoch eine brauchbare Näherung zu erhalten. Es
gibt jedoch auch Problemstellungen, in denen beides versagt. Der anharmonische Oszillator ist ein Beispiel, das nur bedingt störungstheoretisch behandelt werden kann. Störungsrechnung beinhaltet immer die
Annahme einer vergleichsweise kleinen Störung, in unserem Fall einer kleinen treibenden Kraft. Ist diese
Bedingung nicht mehr erfüllt liefert die Störungsrechnung, wenn überhaupt, erst in sehr hohen Ordnungen
brauchbare Ergebnisse. Hohe Ordnungen sind jedoch durch komplizierte Mehrfachintegrale gegeben, die
nicht oder nur sehr schwierig lösbar sein können. Abhängig von der Form der treibenden Kraft kann sich
auch schon in erster Ordnung ein nicht mehr analytisch darstellbares Integral ergeben.
In der heutigen Zeit hat man eine weitere Möglichkeit die fundamentalen Differentialgleichungen der beiden Mechaniken, also das zweite newtonsche Gesetz (2.1) für die klassische Mechanik und die Schrödingergleichung (2.19) für die Quantenmechanik zu lösen. Beide Gleichungen geben durch eine Zeitableitung an,
wie sich eine Größe (die Koordinate der Massepunkte bzw. die Wellenfunktion) verändert. Es sind beides
sogenannte Anfangswertprobleme, die allgemein durch folgende Gleichung gegeben sind:
dy(t)
= f (t,y(t))
dt
mit bekanntem y(t0 ) = y0
(4.1)
Alle im Folgenden behandelten Methoden dienen der Lösung solcher Anfangswertprobleme.
Eine Ableitung ist immer definiert durch einen Grenzübergang, also den Limes ∆t → 0, aus einem Differenzenquotienten y(t+∆t)−y(t)
. Das Grundprinzip der numerischen Berechnung ist nun, diesen Grenzübergang
∆t
rückgängig zu machen, um somit eine Berechnung in diskreten Zeitschritten zu ermöglichen.
4.1 Euler-Verfahren
4.1.1 Explizites Euler-Verfahren
Man erhält das sogenannte explizite Euler-Verfahren, indem man schlicht die Taylorentwicklung von y(t+∆t)
um den bekannten Anfangswert y(t) verwendet. Zusätzlich ersetzt man den Zeitparameter t durch einen
Index i um die Diskretisierung in der Zeit zu verdeutlichen:
y(t + ∆t) = y(t) + ∆t
dy(t) ∆t2 d2 y(t)
+
+ ...
dt
2 dt2
|{z}
= f (t,y(t))
yi := y(t0 + i∆t)
⇒ yi+1 = yi + ∆t f (t,yi ) + O(∆t2 )
(4.2)
Terme proportional zu ∆t2 und höhere Ordnungen werden also vernachlässigt oder anders ausgedrückt:
f (t,y(t)) und damit auch dy(t)
dt werden im Zeitintervall [t; t + ∆t[ als konstant angenommen. Damit handelt es
sich um ein Verfahren erster Ordnung.
Auf der rechten Seite der fundamentalen Gleichungen hat man mit f (t,y(t)) einen Ausdruck, der angibt,
wie sich y(t) zum Zeitpunkt t ändert. Diesen Ausdruck muss man berechnen, um ihn in Gleichung (4.2) einzusetzen und daraus yi+1 zu bestimmen. Dies kann direkt möglich sein, z.B. eine gegebene treibende Kraft in
der klassischen Mechanik. Es kann sich dabei aber auch um einen weiteren Differentialoperator handeln, wie
z.B. für die Schrödingergleichung in der Ortsdarstellung. In diesem Fall kann man den Differentialoperator
28
wieder mit Hilfe einer Taylorentwicklung ausdrücken, worauf wir in Kapitel 4.4 noch genauer eingehen
werden. Man kann also aus einem gegebenen Anfangswert den Wert für einen Zeitschritt später berechnen.
Dies setzt man beliebig fort und erhält somit die gesuchte Zeitentwicklung in diskreten Schritten ∆t.
Dieses Verfahren ist die einfachste Methode, um ein Anfangswertproblem numerisch zu behandeln. Der
Mathematiker Leonhard Euler behandelte es bereits in seinem Buch Institutionum calculi integralis von
1768 [HNW08, S. 35] und die Methode ist daher nach ihm benannt. Ein weiterer Punkt ist, dass auf der
rechten Seite der Gleichung nur Werte yi zum Zeitpunkt t vorkommen. Die Gleichung ist also ein expliziter
Ausdruck für den Iterationsschritt, der yi+1 liefert. Deswegen wird das Verfahren explizites Euler-Verfahren
genannt.
Genauigkeit
Diese Näherung gilt wenn ∆t „genügend“ klein ist. Was genau dabei „genügend“ bedeutet und wie genau
die Ergebnisse auch über viele Schritte, also große Zeiten hinweg sind, werden wir in Kapitel 5 genauer
betrachten. Dazu werden wir die Resultate dieses Verfahrens für den harmonischen Oszillator mit den analytischen Lösungen aus den Kapiteln 2.1.2 und 2.2.2 vergleichen. Der Term O(∆t2 ) in Gleichung (4.2) lässt
aber schon eine Abschätzung zu: der Fehler in einem Zeitschritt ist für ein Verfahren erster Ordnung in etwa
proportional zu ∆t2 .
Stabilität
Der Begriff der Stabilität eines numerischen Verfahrens gibt ein Kriterium an, für welche Funktionen f (t,y(t))
es „funktioniert“, für welche es also sinnvolle Näherungen liefert. Wie wir sehen werden, ist dies nicht immer und speziell auch beim expliziten Euler-Verfahren in Verbindung mit dem harmonischen Oszillator
nicht gegeben. Wir werden die Stabilität nun theoretisch untersuchen, aber man erkennt in Kapitel 5 auch
am praktischen Beispiel sofort, welche Auswirkungen die (In-)Stabilität eines Verfahrens auf die Ergebnisse
hat. Man verwendet zur theoretischen Untersuchung die dahlquistsche Testgleichung [Dah63]:
f (t,y(t)) = λy(t)
mit y(t0 = 0) = 1, λ ∈ C und Re(λ) < 0
dy(t)
⇒
= λy(t)
dt
(4.3)
Man sieht sofort, dass die analytische Lösung durch:
y(t) = eλt
und lim y(t) = 0
t→∞
(4.4)
gegeben ist. Dies wird mit den jeweiligen numerischen Verfahren verglichen, hier also mit dem expliziten
Euler-Verfahren (4.2). Man bringt dazu das numerische Verfahren in die Form:
yi+1 = R(∆tλ)yi
⇒ yi = R(∆tλ)i
(4.5)
Dabei wird R(z) Stabilitätsfunktion und der Bereich |R(z)| < 1 in der komplexen Ebene Stabilitätsgebiet
genannt. In diesem Bereich konvergiert yi für i → ∞ gegen 0 und liefert damit das richtige Ergebnis für den
Grenzwert der analytischen Lösung (4.4). Für |R(z)| > 1 bilden sich dagegen Oszillationen mit steigender
Amplitude und das Verfahren divergiert, es liefert damit kein brauchbares Ergebnis mehr. Das Stabilitätsgebiet lässt also Aussagen darüber zu, wann das jeweilige Verfahren funktioniert.
Sowohl der klassische als auch der quantenmechanische harmonische Oszillator sind sogenannte steife
Anfangswertprobleme. Für diese Probleme ist es von erheblichem Vorteil, wenn die komplette linke Hälfte
der komplexen Ebene im Stabilitätsgebiet enthalten ist. Dies wird klar, wenn man sich verdeutlicht, dass λ
ein Parameter ist, der durch die Problemstellung mit Re(λ) < 0 festgelegt wird. Für ein solches Verfahren
kann man also die Schrittweite ∆t > 0 beliebig wählen und befindet sich dennoch immer im Stabilitätsgebiet
|R(∆tλ)| < 1. Man erhält relativ sinnvolle Ergebnisse. Diese werden zwar für große ∆t sehr ungenau, sie
divergieren aber nicht. Ein solches Verfahren wird „A-stabil“ genannt.
29
Für das explizite Euler-Verfahren erhält man für die Stabilitätsfunktion R(z):
y0 = 1
yi+1 = yi + ∆t f (t,yi ) = (1 + ∆tλ) yi
| {z }
=R(∆tλ)
⇒ R(z) = 1 + z
(4.6)
Daraus erkennt man, dass das Stabilitätsgebiet durch das Innere eines Kreises mit Radius 1 um den Punkt
−1 in der komplexen Ebene gegeben ist. Das explizite Euler-Verfahren ist also nicht A-stabil. Man muss die
Schrittweite ∆t allein aus Stabilitätsgründen genügend klein wählen, damit |1 + ∆tλ| < 1 erfüllt ist. Das kann
zu einem sehr hoher Rechenaufwand führen, nur damit das Verfahren nicht divergiert. Genauigkeitsüberlegungen haben dabei noch gar keine Rolle gespielt.
4.1.2 Implizites Euler-Verfahren
Das Problem der Stabilität des expliziten Euler-Verfahrens kann umgangen werden. Dazu setzt man wieder die Taylorentwicklung an. Anstatt allerdings den gesuchten Wert um den bekannten Anfangswert zu
entwickeln, kann man auch diesen Anfangswert y(t) um den noch unbekannten gesuchten Wert y(t + ∆t)
entwickeln. Dies liefert das implizite Euler-Verfahren:
y(t) = y(t + ∆t) − ∆t
dy(t + ∆t) ∆t2 d2 y(t + ∆t)
+
+ ...
dt } 2
dt2
| {z
= f (t+∆t,y(t+∆t))
⇒ yi+1 = yi + ∆t f (t + ∆t,yi+1 ) + O(∆t2 )
(4.7)
Aus dieser Gleichung kann man, im Gegensatz zum expliziten Euler-Verfahren, den Wert von yi+1 nicht
direkt berechnen, er ist nur implizit gegeben. Daher kommt auch der Name „implizites“ Euler-Verfahren.
Um diesen Wert nun zu erhalten, muss das Gleichungssystem, das durch Gleichung (4.7) gegeben ist, gelöst
werden. Die folgende Stabilitätsbetrachtung dient gleichzeitig als einfaches Beispiel zur Anwendung. Hier
sei noch erwähnt, dass es sich auch bei dem impliziten Euler-Verfahren um ein Verfahren erster Ordnung
handelt und somit der Fehler pro Zeitschritt, wie schon beim expliziten Euler-Verfahren, in etwa proportional
zu ∆t2 ist.
Stabilität
Analog zu Kapitel 4.1.1 werden wir auch hier wieder unter Verwendung der dahlquistischen Testgleichung
(4.3) das Stabilitätsgebiet bestimmen:
y0 = 1
yi+1 = yi + ∆t f (t + ∆t,yi+1 ) = yi + ∆tλyi+1
Um daraus nun die Rekursionsformel zu erhalten, muss man diese Gleichung nach yi+1 auflösen. Hier ist
das relativ einfach. Im Allgemeinen kann y selbst aber z.B. ein Vektor sein und man erhält ein ganzes
Gleichungssystem, das man z.B. mit dem Gauß-Verfahren lösen kann. Genau das wird bei uns auch für den
harmonischen Oszillator sowohl klassisch als auch quantenmechanisch der Fall sein. Es könnte auch sein,
dass yi+1 in f (t + ∆t,yi+1 ) nicht nur linear vorkommt was das Problem noch weiter verkomplizieren würde.
Bei uns ist aber immer nur ein linearer Zusammenhang gegeben. Auflösen nach yi+1 liefert:
⇒ (1 − ∆tλ)yi+1 = yi
⇒ yi+1 =
1
yi
1 −{z
∆tλ
|
}
=R(∆tλ)
⇒ R(z) =
30
1
1−z
(4.8)
1 < 1 folgt |1 − z| > 0. Dies bedeutet, dass das Stabilitätsgebiet durch das gesamte ÄuAus |R(z)| = 1−z
ßere des Kreises mit Radius 1 um den Punkt +1 in der komplexen Ebene gegeben ist. Damit ist die linke
Halbebene enthalten und das implizite Euler-Verfahren ist A-stabil und damit zum numerischen Lösen des
harmonischen Oszillators um ein Vielfaches besser geeignet als das explizite Euler-Verfahren. In Kapitel 5
werden die Ergebnisse dieser beider Verfahren direkt gegenübergestellt.
4.2 Runge-Kutta-Verfahren
Im letzten Kapitel haben wir mit den beiden Euler-Verfahren zwei einfache Methoden zur numerischen Lösung einer Differentialgleichung behandelt. Beide Methoden waren Verfahren erster Ordnung und folglich
war ihr Fehler proportional zu ∆t2 . In diesem Kapitel soll nun die Klasse der Runge-Kutta-Verfahren behandelt werden. Diese stellen eine Verallgemeinerung der Euler-Verfahren dar und beide Euler-Verfahren sind
somit auch Runge-Kutta-Verfahren. Die Grundidee ist, dass die Funktion f (t,y(t)) in einem Iterationsschritt
nicht nur an einer Stelle ausgewertet wird, wie das bei den Euler-Verfahren der Fall ist, sondern an beliebig
vielen. Ein s-stufiges Runge-Kutta-Verfahren wertet f (t,y(t)) an s verschiedenen Stellen aus. Ein solches
Verfahren kann man mit Kombinationen von Taylorentwicklungen um verschiedene Punkte herleiten.
Als Beispiel wird nun die Mittelpunktmethode hergeleitet. Dazu entwickelt man zuerst sowohl den Anfangsals auch den Zielwert um die Entwicklungsstelle t + 12 ∆t:
1
1
1
1 dy(t + 2 ∆t) 1 ∆t2 d2 y(t + 2 ∆t)
y(t) = y(t + ∆t) − ∆t
+
+ ...
2
2
dt
4 2
dt2
1
1
1
1 dy(t + 2 ∆t) 1 ∆t2 d2 y(t + 2 ∆t)
+ ...
y(t + ∆t) = y(t + ∆t) + ∆t
+
2
2
dt
4 2
dt2
und subtrahiert dann die beiden Taylorentwicklungen voneinander:
(4.9b) − (4.9a) ⇒ yi+1 − yi = ∆t
dy(t + 21 ∆t)
+O(∆t3 )
dt
| {z }
(4.9a)
(4.9b)
(4.10)
= f (t+ 12 ∆t,y(t+ 12 ∆t))
Die Besonderheit in diesem Schritt ist, dass die Terme mit ∆t2 sich aufheben und man somit eine Näherung
zweiter Ordnung erhält. Allerdings ist der Wert von y(t+ 12 ∆t) noch unbekannt und man setzt dafür nochmals
die Taylorentwicklung ein:
1
1 dy(t) 1 ∆t2 d2 y(t)
y(t + ∆t) = y(t) + ∆t
+
+ ...
2
2 |{z}
dt
4 2 dt2
= f (t,yi )
1
⇒ yi+ 1 = yi + ∆t f (t,yi ) + O(∆t2 )
2
2
!
1
yi+1 = yi + ∆t f t + ∆t,yi+ 1 + O(∆t3 )
(4.11)
2
2
Die Mittelpunktmethode stellt, wie man nun auf den ersten Blick erkennen kann, ein zweistufiges explizites Runge-Kutta-Verfahren dar: man berechnet zuerst aus yi einen Zwischenwert yi+ 1 und dann aus diesen
2
beiden den gesuchten Wert yi+1 . Beide Berechnungen sind explizit und damit das gesamte Verfahren. Außerdem ergibt sich nur eine Fehler proportional zu ∆t3 . Der Fehler des Zwischenwertes geht zwar mit ∆t2 ,
dieser wird jedoch im zweiten Schritt nochmals mit ∆t multipliziert. Dieses Verfahren ist allerdings, da es
explizit ist, wieder nicht A-stabil.
Ein s-stufiges Runge-Kutta-Verfahren hat allgemein folgende Form:
s
X
k j = f t + ∆tc j ,yi + ∆t
a jl kl , j = 1, . . . ,s
(4.12a)
l=1
yi+1 = yi + ∆t
s
X
b jk j
(4.12b)
j=1
31
Es müssen also zuerst die s Zwischenwerte k1 bis k s berechnet werden um dann aus ihnen eine Linearkombination zu bilden, die die Näherung für yi+1 darstellt. Im Allgemeinen ist die Berechnung der Zwischenwerte
aber nicht explizit möglich, denn die Zeile (4.12a) stellt ein ganzes Gleichungssystem dar. Je nach gegebenem f (t,y(t)) kann dies sehr kompliziert werden. Wir werden in den folgenden Kapiteln aber noch genauer
sehen, was für diese Berechnung nötig ist. Ein Runge-Kutta-Verfahren ist explizit, wenn für l ≥ j alle
a jl = 0 sind. In diesem Fall kann jedes k j aus yi und den vorhergehenden k j explizit berechnet werden. Für
die Runge-Kutta-Verfahren kann man, genauso wie bereits für die Euler-Verfahren, mit der dahlquistischen
Testgleichung wieder das Stabilitätsgebiet berechnen. Dies würde hier aber zu weit führen. Führt man die
Berechnung durch wird aber deutlich, dass ein explizites Runge-Kutta-Verfahren im Gegensatz zu einem
impliziten nie A-stabil sein kann.
Die charakteristischen Koeffizienten b j , c j und a jl stellt man oft in einem sogenannten Butcher-Tableau
folgendermaßen dar:
c1
c2
..
.
a11
a21
..
.
a12
a22
..
.
...
...
...
a1s
a2s
..
.
cs
a s1
b1
a s2
b2
...
...
a ss
bs
Im Tabelle 4.1 sind einige gängige Runge-Kutta-Verfahren mit Ordnung, Angabe, ob sie implizit oder explizit sind, und Butcher-Tableau aufgeführt. Alle als implizit gelisteten Verfahren sind auch A-stabil.
32
Name
Butcher-Tableau
explizites Euler-Verfahren
1. Ordnung
explizit
0
1
implizites Euler-Verfahren
1. Ordnung
implizit
1
1
1
0
Mittelpunktmethode
2. Ordnung
explizit
1
2
1
2
0
Gauß-Legendre 1
(auch impl. Mittelpunktmethode)
2. Ordnung
implizit
1
2
1
1
2
1
Trapezmethode
2. Ordnung
implizit
0
0
0
1
1
2
1
2
1
2
1
2
0
klassisches
Runge-Kutta-Verfahren
4. Ordnung
explizit
1
2
1
2
1
2
0
0
0
1
1
6
1
3
1
3
1
1
2
1
6
√
Gauß-Legendre 2
4. Ordnung
implizit
1
2
−
1
2
+
3
6
√
3
6
√
1
4
1
4
+
√
3
6
1
2
1
4
−
3
6
1
4
1
2
Tabelle 4.1: Gängige Runge-Kutta-Methoden
33
4.3 Klassische Betrachtung
Um nun den klassischen Oszillator numerisch zu berechnen fehlt uns noch ein kleines Detail: alle in den
vergangenen Kapiteln betrachteten Verfahren gehen von einer Differentialgleichung erster Ordnung aus.
Das zweite newtonsche Gesetz ist allerdings eine Differentialgleichung zweiter Ordnung. Eine Differentialgleichung zweiter Ordnung kann man aber auch einfach durch zwei Differentialgleichungen erster Ordnung
ausdrücken und aus
F = ma mit a = v̇ = ẍ
folgt:
dx(t)
= v(t)
dt
dv(t) F(t,x(t))
=
dt
m
(4.13)
Nun fasst man x(t) und v(t) zu einem zweidimensionalen Vektor zusammen und schreibt das zweite newtonsche Gesetz als Vektor-Differentialgleichung in genau der Form (4.1) die wir als Ausgang für alle numerischen Überlegungen verwendet haben:
!
x(t)
~u(t) =
v(t)
uv (t)
d~u(t) ~
= f (t,~u(t)) mit f~(t,~u(t)) = F(t,ux (t))
(4.14)
dt
m
Dabei bezeichnen u x (t) = x(t) und uv (t) = v(t) die x- bzw. v-Komponente der erweiterten Koordinate ~u(t).
Man hat nun alles zusammen, was man braucht, um eine numerische Berechnung des klassischen Oszillators
durchzuführen: die Bewegungsgleichung in der Form (4.1) und ein numerisches Verfahren, das angibt, wie
ein Iterationsschritt von ~u(t) nach ~u(t + ∆t) aussieht. Die zeitliche Diskretisierung wird wieder durch einen
Index i gekennzeichnet:
!
!
xi
x(t0 + i∆t)
~ui :=
(4.15)
:= ~u(t0 + i∆t) =
v(t0 + i∆t)
vi
Wir werden nun den Iterationsschritt am Beispiel des impliziten Euler-Verfahrens beschreiben. Das Prinzip
ist aber für jedes numerische Verfahren das gleiche. Alles was man nun noch zu tun hat, ist die charakteristischen Koeffizienten und die erweiterte Koordinate ~ui und f~(t,~ui ) aus (4.14) in die allgemeine Form des
Runge-Kutta-Verfahrens (4.12a) und (4.12b) einzusetzen. Für das implizite Euler-Verfahren erhält man mit
der Kraft für den getriebenen harmonischen Oszillator (2.8):
F(t,x) = −kx + FS (t)
~ui+1 = ~ui + ∆t f~(t + ∆t,~ui+1 )
Schreibt man f~(t + ∆t,~ui+1 ) aus, erhält man das zu lösende Gleichungssystem:
vi+1
xi+1 = xi + ∆tvi+1
∆t
(−kxi+1 + FS (t + ∆t))
= vi +
{z
}
m |
(4.16)
=F(t,xi+1 )
Man hat also ein lineares Gleichungssystem mit zwei Gleichungen und zwei Unbekannten erhalten. Dieses
wird in jedem Iterationsschritt nach den Unbekannten xi+1 und vi+1 aufgelöst, wozu man z.B. den GaußAlgorithmus verwenden kann. Man hat jetzt aus einem gegebenen Anfangszustand x0 und v0 die Zeitentwicklung des getriebenen klassischen harmonischen Oszillators in diskreten Zeitschritten ∆t erhalten. Dabei
34
ist die numerische Berechnung unabhängig von der Form der treibenden Kraft FS , da nur ihr Wert zu bestimmten Zeiten in die Berechnung eingeht. Dieser kann in beliebiger Form gegeben sein. Genau hier liegt
der Vorteil der numerischen Methode: egal wie kompliziert die treibende Kraft ist, man erhält immer ein Ergebnis. Die Genauigkeit kann dabei durch ∆t gesteuert werden und ist nur durch die zur Verfügung stehende
Rechenzeit bzw. -leistung begrenzt. Für kleinere ∆t wird das Ergebnis je nach Fehlerordnung des Verfahrens
um ein Vielfaches genauer, es müssen aber auch mehr Berechnungen durchgeführt werden.
Hier wurde nur der harmonische Oszillator betrachtet. Möchte man den anharmonischen Fall, wie er
in Kapitel 3 beschrieben wurde, numerisch berechnen, so ändert sich F(t,x). Insbesondere taucht darin
dann ein Term auf, in dem x in dritter Potenz vorkommt. Dieser Term taucht folglich auch in Gleichung
(4.16) auf. Damit ist das Gleichungssystem, das aus jedem impliziten Verfahren resultiert, nicht mehr linear und lässt sich nur noch schwierig lösen. So kann man ein nicht-lineares Gleichungssystem auch nicht
mehr mit dem Gauß-Verfahren lösen, sondern müsste hier z.B. das Newton-Verfahren verwenden um eine
Näherungslösung zu erhalten. Verwendet man hingegen ein explizites Verfahren, wie z.B. das klassische
Runge-Kutta-Verfahren, so taucht darin F(t,x) nur von bekannten x auf und kann somit direkt ausgerechnet
werden. Ein explizites Verfahren ist somit unabhängig von der Form von F(t,x) anwendbar. Wir werden uns
daher für den klassischen anharmonischen Oszillator auf explizite Verfahren beschränken. Obwohl diese
nicht A-stabil sind, kann man damit sehr präzise Lösungen erhalten, wie Kapitel 5 zeigen wird.
4.4 Quantenmechanische Betrachtung
Wir wollen nun mit den zuvor betrachteten numerischen Methoden den quantenmechanischen Oszillator
behandeln. Man muss sich hier, bevor man losrechnen kann, für eine Basis entscheiden: naheliegend sind
einerseits die Orts- und Impulsbasis und andererseits die Besetzungszahlbasis. Dabei sind die Berechnungen in Orts- und Impulsbasis ähnlich, da der Orts- und der Impulsoperator beide die gleiche Form in der
Basis des jeweils anderen haben. Wir werden uns daher auf die Ortsbasis beschränken. Für den anharmonischen Oszillator kann man die Berechnung auch in der Besetzungszahlbasis des harmonischen Oszillators
durchführen, was einige Vorteile hat.
4.4.1 Ortsbasis
Wir wollen zuerst in der Ortsbasis rechnen. Damit ist der quantenmechanische Zustand des Systems eine
komplexwertige Funktion der Zeit t und des Ortes x:
hx|ψ(t)i = ψ(t,x)
(4.17)
Im Gegensatz zur klassischen Mechanik hat man es bei der fundamentalen Gleichung der Quantenmechanik,
der Schrödingergleichung (2.19), mit einer Differentialgleichung erster Ordnung zu tun. Diese hat somit
∂
schon die Form (4.1) und wir müssen hier nichts verändern. In der Ortsdarstellung folgt mit p̂ = −i~ ∂x
und
x̂ = x für die Schrödingergleichung:
!
∂ψ(t,x)
~2 ∂2
i~
= −
+ V(t,x) ψ(t,x)
(4.18)
∂t
2m ∂x2
Hier hat man nun den Fall, der in Kapitel 4.1.1 schon kurz erwähnt wurde: man hat auf der rechten Seite,
∂2
also in f (t,ψ(t,x)) mit ∂x
2 einen weiteren Differentialoperator. Außerdem ist die Wellenfunktion ψ(t,x) eine
Funktion, die einmal von der Zeit t und dann auch vom Ort x abhängt. Die Zeitabhängigkeit wird analog zur
Zeitabhängigkeit von x(t) und v(t) in der klassischen numerischen Berechnung wieder mit der Schrittweite
∆t diskretisiert. Wir müssen nun allerdings, um nicht mit einer ganzen Funktion, sondern mit einzelnen Werten rechnen zu können, auch die Ortsabhängigkeit diskretisieren. Daraus ergibt sich dann eine Näherung der
Wellenfunktion zu einer bestimmten Zeit. Also berechnen wir ψ(t,x) nicht für kontinuierliche Werte von x
sondern, analog zur Zeitabhängigkeit, nur an diskreten Werten xi . Wir haben bisher immer praktischerweise
x = 0 als das Potentialminimum, also die Ruhelage, gewählt. Dann wird sich der klassische Massepunkt und
damit auch der Bereich, in dem der Betrag der Wellenfunktion ungleich null ist, immer in der Umgebung
35
von x = 0 befinden. Für |x| 0 können wir für relativ kleine Energien annehmen, dass |ψ(t,x)| = 0 ist.
Wir wählen uns n Stützstellen x1 bis xn in diesem Bereich um x = 0, mit Abstand ∆x und berechnen die
Wellenfunktion nur innerhalb dieses Bereichs:
x j = xmin + j∆x
für j = 1, . . . ,n
(4.19)
Die Parameter xmin und ∆x müssen dementsprechend gewählt werden. Damit haben wir ψ(t,x) in beiden
Parametern diskretisiert, und um dies deutlich zu machen, definieren wir:
ψi j := ψ j (t0 + i∆t) := ψ(t0 + i∆t,xmin + j∆x)
ψ1 (t0 + i∆t)
ψ (t + i∆t)
2 0
~ i := ψ
~ (t0 + i∆t) :=
ψ
..
.
ψn (t0 + i∆t)
(4.20)
Die ortsdiskretisierte Wellenfunktion ist also ein zeitabhängiger n-dimensionaler Vektor. Die zusätzliche
Diskretisierung der Zeit ergibt den zweiten Index i.
Finite Differenzen
Da wir nun jedoch keine Funktion mit kontinuierlichem Parameter x mehr haben, sondern nur noch eine
∂2
Näherung davon, müssen wir auch den Differentialoperator ∂x
2 , der in der Schrödingergleichung in Ortsbasis (4.18) auftaucht, anders ausdrücken. Dies bewerkstelligt man, indem man wieder Taylorentwicklungen
verwendet. Da es sich um einen Differentialoperator zweiten Grades handelt, benötigt man mindestens die
2 ψ(t,x)
Taylorentwicklung um zwei Punkte. Um den Wert von ∂ ∂x
am Ort x zu berechnen, verwendet man die
2
Taylorentwicklungen von ψ(t,x − ∆x) und ψ(t,x + ∆x) um x und erhält:
∂ψ(t,x) ∆x2 ∂2 ψ(t,x)
+
+ ...
∂x
2
∂x2
∂ψ(t,x) ∆x2 ∂2 ψ(t,x)
ψ(t,x + ∆) = ψ(t,x) + ∆x
+
+ ...
∂x
2
∂x2
ψ(t,x − ∆) = ψ(t,x) − ∆x
(4.21a)
(4.21b)
Durch Addition der beiden Zeilen fallen alle ungeraden Terme, also insbesondere ∆x ∂ψ(t,x)
∂x , weg. Der erste
weggelassene Term wächst mit ∆x4 , wodurch sich die Fehlerordnung ergibt:
(4.21a) + (4.21b) ⇒ ψ j−1 (t) + ψ j+1 (t) = 2ψ j (t) + ∆x2
⇒
∂2 ψ(t,x)
+ O(∆x4 )
∂x2
∂2 ψ(t,x) ψ j−1 (t) − 2ψ j (t) + ψ j+1 (t)
=
+ O(∆x2 )
∂x2
∆x2
(4.22)
Man hat also eine Näherung zweiter Ordnung für die zweite Ableitung erhalten. Speziell diese Formel
nennt man „Dreipunktformel“. Verwendet man außer den Entwicklungen von ψ(t,x − ∆x) und ψ(t,x + ∆x)
auch noch die Entwicklungen von ψ(t,x − 2∆x) und ψ(t,x + 2∆x), so kann man durch Linearkombination
aller vier Gleichungen erreichen, dass auch der Term mit ∆x4 wegfällt und nur Terme mit ∆x6 und höher
übrig bleiben. Somit liefert dies eine Näherung vierter Ordnung. Dies lässt sich für beliebige Ableitungen in
beliebiger Ordnung durchführen und liefert allgemein für die n-te Ableitung eine Näherung m-ter Ordnung:
m
∂n ψ(t,x)
1 X
ak ψ j+k (t) + O(∆xm )
=
∂xn
xn k=−m
(4.23)
Dabei sind ai die Finite-Differenzen-Koeffizienten und das Verfahren, um die Ableitung zu nähern, wird
Finite-Differenzen-Methode genannt. Die Koeffizienten der zweiten Ableitung für verschiedene Ordnungen
sind in Tabelle 4.2 angegeben. Im Allgemeinen müssen diese finiten Differenzen nicht symmetrisch sein,
36
allerdings reicht dies für unsere Zwecke aus. Die einzigen zwei Stellen, an denen es Probleme geben könnte,
wären x1 und xn . Da wir aber angenommen haben, dass die Wellenfunktion außerhalb dieses Bereichs
null ist, muss sie auch am Rand schon verschwindend klein sein, und wir müssen keine asymmetrischen
Differenzen verwenden. Ist dies nicht gegeben, funktioniert unsere numerische Berechnung sowieso nicht
mehr, da die Welle den Bereich in den nächsten Zeitschritten verlassen würde, d.h. wir müssen den Bereich
schlicht größer wählen.
Ordnung m
a−4
a−3
a−2
a−1
a0
a1
1
−2
1
1
− 60
4
3
− 25
4
3
1
− 60
1
90
3
− 20
3
2
49
− 18
3
2
3
− 20
1
90
8
315
− 15
8
5
− 205
72
8
5
− 15
8
315
2
4
6
8
1
− 560
a2
a3
a0
1
− 560
Tabelle 4.2: Finite-Differenzen-Koeffizienten ak der zweiten Ableitung aus [For88]
Iterationsschritt
Mit der ortsdiskretisierten Wellenfunktion (4.20) und der Näherung für die Ableitung (4.23) können wir nun
am Ort x j den Hamiltonoperator angewandt auf diese Wellenfunktion schreiben als:
!
~2 ∂2
+
V(t,
x
)
j Ψ(t,x j ) =
2m ∂x2
!
j+m
m
X
~2
~2 X
ak Ψ j+k (t) + V(t,x j )Ψ j (t) =
−
ak− j + δ jk V(t,xk ) Ψk (t)
=−
2m∆x2 k=−m
2m∆x2 {z
}
k= j−m |
Ĥ(t)ψ(t,x j ) = −
(4.24)
=:Ĥ jk (t)
Das bedeutet also, dass wir den Hamiltonoperator Ĥ(t) in Ortsdiskretisierung durch eine zeitabhängige
Matrix mit den Komponenten Ĥ jk (t) ausgedrückt haben. Die Anwendung des Hamiltonoperators auf einen
Zustand stellt nun eine einfache Matrix-Vektor-Multiplikation dar. Die Matrix des Hamiltonoperators sieht
wie folgt aus:
−α1
...
−α0 +V(t,x0 )
−α0 +V(t,x1 )
−α1
...
−α−1
−α−1
−α0 +V(t,x2 )
−α1
Ĥ(t) = . . .
...
...
...
...
−α−1 −α0 +V(t,xn ) −α1
mit αk :=
~2
ak
2m∆x2
(4.25)
Alle Elemente dieser Matrix sind für jeden Zeitpunkt t bekannt und somit ausrechenbar. Man setzt diese
Matrix nun in die Schrödingergleichung in Ortsbasis (4.18) ein und formt diese dadurch in eine VektorDifferentialgleichung der Form (4.1) um:
i~
~ (t)
dψ
~ (t)
= Ĥ(t)ψ
dt
(4.26)
37
Genau diese Form haben wir bis auf einen Faktor i~ bereits bei der klassischen Berechnung in Kapitel 4.3
~ (t)) ablesen:
erhalten und verwendet. Somit können wir daraus wieder f~(t,ψ
n
dψ j (t)
iX
=−
Ĥ jk (t)ψk (t)
dt
~ k=1
|
{z
}
für j = 1, . . . ,n
~ (t))
= f j (t,ψ
~ (t)) =
⇒ f j (t,ψ
n
i~ X
1
ak− j ψk (t) − V(t,x j )ψ j (t)
2
~
2m∆x k=1
(4.27)
Dies kann nun wieder in ein beliebiges numerisches Verfahren eingesetzt werden und liefert damit den
Iterationsschritt, was hier nochmals am Beispiel des impliziten Euler-Verfahrens demonstriert wird:
1
V(t,x) = Ax4 + mω20 x2 + FS (t)x
2
~
~
~ i+1 )
ψi+1 = ψi + ∆t f~(t + ∆t,ψ
~ i+1 ) wird wieder ausgeschrieben und liefert:
f~(t + ∆t,ψ
ψi+1, j
!
j+m
∆t
i~∆t X
1
2 2
4
ak− j ψi+1,k (t) −
= ψi j +
Ax + mω0 x j + FS (t + ∆t)x j ψi+1, j
~ | j 2
2m∆x2 k= j−m
{z
}
=V(t+∆t,x j )
für j = 1, . . . ,n
(4.28)
Dies sieht nun zwar relativ kompliziert aus, ist aber nur ein lineares Gleichungssystem mit den n unbekannten ψi+1,1 bis ψi+1,n und n Gleichungen. Damit ist es z.B. durch das Gauß-Verfahren einfach lösbar.
Im Unterschied zum klassischen Iterationsschritt (4.16) ist nun auch x keine Variable mehr, sondern die x j
haben feste Werte und ihre höhere Potenz behindert nicht das Lösen des Systems. Das Gleichungssystem
bleibt auch für den anharmonischen Oszillator linear. Außerdem ist ak− j für |k − j| > m2 gleich null, wobei m
die Ordnung der gewählten finiten Differenz für die Ortsableitung ist. Damit ist die Koeffizientenmatrix des
Gleichungssystems eine Bandmatrix der Breite 2m + 1 und somit sehr dünn besetzt. Das Gleichungssystem
lässt sich somit mit einem modifizierten Gauß-Algorithmus in O(nm2 ) relativ schnell lösen. Wie schon beim
klassischen Fall, ist auch diese Lösung vollkommen unabhängig von der Form von FS (t). Diesmal kommt
sogar V(x) nur mit bestimmten Werten für x (nämlich genau die x j ) vor. Damit ist ein numerisches Verfahren wie dieses auch unabhängig von der Form von V(x) und kann für ein beliebiges Potential angewandt
werden.
4.4.2 Besetzungszahlbasis des harmonischen Oszillators
Nun wollen wir die Berechnung in der Besetzungszahlbasis durchführen. Der quantenmechanische Zustand
ist damit eine Funktion der Zeit t und der Besetzungszahl n:
hψn |ψ(t)i = ψ(t,n)
(4.29)
Im letzten Kapitel mussten wir, um numerisch rechnen zu können, zuerst die x-Werte diskretisieren, da x
kontinuierliche Werte annehmen konnte. Damit war zusätzlich zu der Näherung zur Diskretisierung der Zeitwerte t eine weitere Näherung nötig. Die Besetzungszahl n kann aber nur ganze positive Werte annehmen,
und zwar genau die Eigenwerte des Besetzungszahloperators N̂. Somit ist hier keine weitere künstliche Diskretisierung, und damit auch keine Näherung mehr nötig. Um dies zu verdeutlichen, definieren wir analog
zur Ortsdiskretisierung:
ψin := ψn (t0 + i∆t) := ψ(t,n)
ψ1 (t0 + i∆t)
~ i := ψ
~ (t0 + i∆t) := ψ2 (t0 + i∆t)
ψ
..
.
38
(4.30)
Somit hat man es beim Zustand wieder mit einem Vektor zu tun. Es stellt sich nun allerdings ein neues
Problem: die Besetzungszahl kann alle ganzen positiven Werte, also unendlich viele Werte annehmen. Der
~ (t) ist unendlichdimensional. Es ist aber selbstverständlich nicht möglich unendlich viele Werte
Vektor ψ
numerisch zu berechnen und wir müssen n beschränken. Dazu nehmen wir an, dass ψn (t) = 0 für n > N gilt.
Das bedeutet anschaulich ausgedrückt, dass Zustände mit hoher Besetzungszahl und damit hoher Energie
unbesetzt sind. Niederenergetische Zustände befinden sich immer in der Nähe der Ruhelage x = 0. Die
Beschränkung von n ist also in etwa gleichbedeutend mit der Beschränkung von x auf einen Bereich um
diese Ruhelage aus Kapitel 4.4.1.
In Kapitel 2.2.1 haben wir bereits die Matrixdarstellungen der Operatoren â, ↠und N̂ bestimmt und wir
wissen auch wie der Hamiltonoperator des ungetriebenen harmonischen Oszillators Ĥ0 (2.26) und der Ortsoperator x̂ (2.44) dadurch ausgedrückt werden können. Durch die Beschränkung n < N werden automatisch
auch diese Matrizen auf die Größe N × N beschnitten.
0 + 12
!
1
1
1
+
2 .
Ĥ0 = ~ω0 N̂ +
= ~ω0
..
2
1
N−2
√
0
1 √
√
s
s
1 0
2
√
~
~
.
†
.
â + â =
x̂ =
(4.31)
.
2 0
2mω0
2mω0
. . . . . . √
N−1
√
N−1 0
Der Hamiltonoperator des getriebenen anharmonischen Oszillators ist in Besetzungszahlbasis gegeben durch:
Ĥ(t) = Ĥ0 + A x̂4 + FS (t) x̂
(4.32)
Nun sind wieder alle Matrixelemente des Hamiltonoperators Ĥ(t) zu einem Zeitpunkt t bekannt. Somit kann
~ (t)) erhält
man die zeitabhängige Schrödingergleichung (2.19) wieder in der Form (4.1) schreiben. Für f~(t,ψ
man:
~ (t)
dψ
~ (t))
= f~(t,ψ
dt
!
N
1
i X 4
~
mit fn (t,ψ(t)) = −iω0 n + ψn (t) −
A x̂nk + FS (t) x̂nk ψk (t)
2
~ k=0
(4.33)
Nach Wahl eines numerischen Verfahrens erhält man daraus wieder das Gleichungssystem für den Iterationsschritt. All dies geschieht vollkommen analog zum Vorgehen in der Ortsbasis, einzig die Matrixelemente
des Hamiltonoperators Ĥnk (t) sind verschieden.
Der Vorteil der Berechnung in der Besetzungszahlbasis ist, dass die Diskretisierung schon vorgegeben
ist und damit die zweite Näherung entfällt. In der Ortsbasis muss man n sehr groß wählen um den Fehler
zu minimieren. Das resultiert in einem großen Gleichungssystem und damit einer langen Berechnungszeit
für einen Iterationsschritt. In der Besetzungszahlbasis muss man N nur groß genug wählen um den erwarteten Energiebereich abzudecken. Wie wir in Kapitel 5 sehen werden ist mit einem sehr viel kleineren N
ein ebenso genaues Ergebnis möglich, jedoch ist dieses auf dem gleichen Computer sehr viel schneller zu
berechnen. Ein kleinerer Nachteil dieser Methode ist jedoch, dass das Potential nicht mehr beliebig ist. Es
muss durch die Summe aus harmonischem Potential und Operatoren mit bekannter Matrixdarstellung in Besetzungszahlbasis darstellbar sein. Für unseren Fall ist dies ideal, da die Matrixdarstellung von x̂ und damit
auch Potenzen davon bekannt sind.
4.4.3 Besetzungszahlbasis des anharmonischen Oszillators
Auch für den anharmonischen Oszillator existiert eine Besetzungszahlbasis, also eine Eigenbasis des Besetzungszahloperators und des Hamiltonoperators. Ein Operator (mit diskreten Eigenwerten) ist in seiner
39
Eigenbasis immer durch eine Diagonalmatrix mit den Eigenwerten auf der Diagonalen gegeben. Der Besetzungszahloperator ist in seiner Eigenbasis also durch eine Diagonalmatrix mit den Besetzungszahlen
0,1,2, . . . auf der Diagonalen und der Hamiltonoperator analog durch eine Diagonalmatrix mit den Eigenenergien des Systems E0 ,E1 ,E2 , . . . auf der Diagonalen gegeben. Um allerdings Berechnungen in dieser
Basis durchzuführen, benötigen wir sowohl die Eigenenergien als auch eine Darstellung des Ortsoperators
x̂ in dieser Basis. Beides ist analytisch nicht exakt berechenbar, und wenn die Anharmonizität zu groß wird,
versagt auch die Störungstheorie aus Kapitel 3. In den letzten beiden Kapiteln haben wir aber den Hamiltonoperator unter geeigneten Annahmen bzw. Näherungen als endlichdimensionale Matrix dargestellt. Der
zeitunabhängige Teil, also (4.25) und (4.32) mit FS (t) = 0, dieser Matrizen ist dabei immer reell und symmetrisch. Somit sind sie diagonalisierbar. Im Folgenden steht E für die Eigenbasis und B für die gewählte
Ausgangsbasis, also entweder die Ortsbasis oder die Eigenbasis des harmonischen Oszillators. Die Diagonalisierung einer Matrix liefert mit ĤE und Ŝ die Eigenwerte und die Eigenvektoren. Die Eigenvektoren
entsprechen den Eigenzuständen des Systems.
E0
E1
−1
Ŝ ĤB Ŝ = ĤE =
E2
. .
.
(4.34)
Die Matrix Ŝ enthält dabei die Eigenvektoren ~bi von ĤB als Spaltenvektoren. Diese sind linear unabhängig
und Ŝ stellt somit eine unitäre Transformation von der Eigenbasis in die Basis B dar. Angenommen man hat
~ B in der Basis B gegeben und möchte diesen in die Eigenbasis E abbilden, also die
einen Zustandsvektor ψ
Basis wechseln, muss man also nur von links mit Ŝ −1 multiplizieren:
~B
ψE,i = ~bi ψ
~ E = Ŝ −1 ψ
~B
⇒ψ
(4.35)
Die Basis eines beliebigen Operators ÂB wird, passend zu (4.34), folgendermaßen gewechselt:
ÂE = Ŝ −1 ÂB Ŝ
(4.36)
Da wir die Matrixdarstellung des Ortsoperators x̂B in der Basis B, also der Ortsbasis bzw. der Besetzungszahlbasis des harmonischen Oszillators kennen, können wir mit Ŝ den zeitabhängigen Hamiltonoperator in
Eigenbasis angeben:
Ĥ(t) = ĤE + Ŝ −1 x̂B Ŝ FS (t)
| {z }
(4.37)
= x̂E
Alle diese Matrizen sind nach der Diagonalisierung von ĤB bekannt und man kann nun wieder mit einem
numerischen Verfahren nach Wahl aus einem Ausgangszustand die Zeitentwicklung berechnen. Zusätzlich
haben wir durch die Diagonalisierung auch die Eigenzustände und somit insbesondere den Grundzustand
erhalten.
Zur Diagonalisierung wurde das Jacobi-Verfahren verwendet. Dieses bringt eine Matrix durch mehrere hintereinander ausgeführte sogenannte Jacobi-Rotationen in Diagonalform. Die Jacobi-Rotationen selbst
ergeben die Matrix Ŝ . Es handelt sich dabei um ein Näherungsverfahren, das man abbricht, wenn alle Elemente ĤE,i j < für i , j für einen geeignet klein gewählten Wert , sind. Die verwendete Implementierung
stammt von [Hah11].
40
5 Ergebnisse
In diesem Kapitel sollen nun alle zuvor vorgestellten analytischen und numerischen Methoden miteinander
verglichen werden, um ihre Vor- bzw. Nachteile darzulegen. Da die Faktoren m, ω0 und auch ~ für die
beobachtbaren Effekte irrelevant sind und nur die Skalierung ändern, werden diese im Folgenden alle auf
1 gesetzt. Somit entfallen auch alle sonst nötigen Angaben der Einheiten. Außerdem wird die Berechnung
immer bei t0 = 0 gestartet. Die Parameter der treibenden Kraft FS werden, abgesehen von der maximalen
Amplitude AS , im Folgenden ebenfalls nicht mehr variiert. Es werden, falls nicht explizit anders angegeben,
immer folgende Werte verwendet: B = 0,05 und tS = 100.
5.1 Analytische Lösungen
Erwartungswerte
Wie bereits in Kapitel 2.2.2 bestätigt werden konnte, stimmen die klassischen Zeitentwicklungen und die
quantenmechanischen Erwartungswerte bei exakter Berechnung überein. Sie werden hier also auch zusammen behandelt. Es stellt sich nun die Frage, für welche Werte der Parameter man den harmonischen Oszillator untersuchen und vergleichen sollte. Wie man in Gleichung (2.16) erkennen kann, wirken die Parameter
m und AS nur multiplikativ, sie skalieren das Problem also nur auf der x-Achse und eine Variation ist damit
uninteressant. Auch der Parameter ω0 wirkt multiplikativ, steht aber zusätzlich noch im Sinus. Dies stellt jedoch nur eine zusätzliche Skalierung auf der Zeitachse dar und somit ist auch eine Variation von ω0 unnötig.
Auch der Parameter B, der in der treibenden Kraft die Anregungsdauer bestimmt, ändert an dem Szenario
nur wenig. Damit bleibt nur noch die Anregungsfrequenz übrig.
In Abbildung 5.1 sind die exakten Zeitentwicklungen des Ortes nach Gleichung (2.69) bzw (2.17) und
(2.18) und die dazugehörigen treibenden Kräfte abgebildet. Im oberen Graph wird der Oszillator für eine
gewisse Zeit mit Resonanzfrequenz ωS = 1 angeregt. Man sieht sehr deutlich, wie in diesem Zeitabschnitt
die Amplitude stetig und sehr stark ansteigt. Die „Halbwertszeit“ der Anregung, also die Zeit in der die
Anregung mit mehr als 50% ihrer maximalen Amplitude wirkt, beträgt für B = 0,05 etwas weniger als
28 Zeiteinheiten. Trotzdem steigt die Amplitude der Schwingung auf ca. 20 an. Würde man die treibende
Kraft zeitlich nicht beschränken, ergäbe sich die Resonanzkatastrophe. Im mittleren Graph wird der Oszillator mit einer Frequenz ωS = 0,7 knapp unter der Resonazfrequenz aber ansonsten gleichen Parametern
angeregt. Die Schwingungsamplitude steigt dabei mit steigender Anregungsamplitude stetig an. In diesem
Bereich wird dem Oszillator auch die Anregungsfrequenz aufgezwungen. Da sich die Anregungsfrequenz
noch recht nahe an der Eigenfrequenz befindet ergibt sich am Punkt maximaler Anregungsamplitude t = 100
auch eine relativ große Schwingungsamplitude mit maximalem Ausschlag von ca. 2. Ab diesem Zeitpunkt
fällt die Anregungsamplitude wieder ab und der Oszillator bildet Oberschwingungen bis die Anregung verschwindend gering wird. Ab dann geht der Oszillator wieder in eine harmonische Schwingung über, deren
Amplitude von der Anregungsamplitude und der Anregungszeit abhängt. Für den Fall ωS = 1,8 ergibt sich
fast das gleiche Bild (in der Abbildung unten). Hier ist die Anregungsfrequenz allerdings schon weiter von
der Eigenfrequenz entfernt und so ist auch die Schwingungsamplitude geringer. Man erkennt hier im Bereich
von t ≈ 110 bis etwa t ≈ 150 sehr gut die Oberschwingungen. Diese Ergebnisse sind wenig spektakulär und
decken sich vollständig mit unseren Erwartungen.
41
20
10
0
−10
x(t) = h x̂i(t)
FS (t)
−20
0
20
40
60
80
100
t
120
140
160
180
200
0
20
40
60
80
100
t
120
140
160
180
200
0
20
40
60
80
100
t
120
140
160
180
200
2
1
0
−1
−2
0,4
0,2
0
−0,2
−0,4
Abbildung 5.1: Exakte klassische Zeitentwicklung x(t) bzw. quantenmechanischer Ortserwartungswert
h x̂i(t): Resonanzfall ωS = 1 (oben), Anregung langsamer als Resonanzfrequenz ωS = 0,7
(Mitte), Anregung schneller als Resonanzfrequenz ωS = 1,8 (unten). Die maximale Amplitude der treibenden Kraft ist jeweils AS = 1.
42
Zustand
Im Gegensatz zum vorherigen Abschnitt sollen nun nicht nur die Erwartungswerte, sondern der gesamte
Zustandsvektor analysiert werden. Wir haben den exakten Zustandsvektor in Kapitel 2.2.2 in Spektraldarstellung ausgerechnet und werden nun auch diese betrachten. Die Spektraldarstellung ist dadurch gekennzeichnet, dass sie einen Zustand |ψ(t)i als Linearkombination der Eigenzustände |ψn i darstellt. Die Spektralkoeffizienten werde wie gehabt mit cn (t) bezeichnet und ihr Betragsquadrat gibt somit an, mit welcher
Wahrscheinlichkeit sich das System zum Zeitpunkt t im Eigenzustand |ψn i befindet. Man erhält dafür aus
der Zeitentwicklung des Zustandes (2.64):
2
|cn (t)|2 = e−|α(t)|
|α(t)|2n
n!
mit α(t) = ζ(t,t0 )i
(5.1)
Diese Darstellung ist in Abbildung 5.2 für die ersten sechs cn abgedruckt. Zum Vergleich ist jeweils
der Ortserwartungswert in grau mit eingezeichnet. Im oberen Graph wurde dabei wieder die Resonanzfrequenz verwendet. Für die Spektraldarstellung spielt die Anregungsamplitude AS nun eine entscheidende
Rolle. Sie bestimmt maßgeblich, wie viel Energie dem Oszillator zugeführt wird, und damit, auf welche
Spektralkoeffizienten sich diese „aufteilt“. Dabei ist für den Resonanzfall mit AS = 0,1 eine geringere Anregungsamplitude gewählt worden, damit die wenigen im Diagramm darstellbaren Spektralkoeffizienten sich
den Großteil der Energie teilen. Am Anfang befindet sich der Oszillator im Grundzustand, d.h. nur c0 = 1 ist
ungleich null. Setzt dann die Anregung ein, sieht man sehr gut, wie mit steigender Schwingungsamplitude
und damit steigender Energie des Oszillators die Spektralkoeffizienten nacheinander ansteigen. |c0 | wird dabei monoton kleiner. Die Anstiege und Abnahmen geschehen stufenweise, da die treibende Kraft oszilliert,
also periodisch auch verschwindet. Zu Beginn der Anregung steigt |c1 |2 etwa um den Betrag an, um den |c0 |2
abnimmt. Etwas später kommt dann |c2 | hinzu und so weiter. Die Summe aller |cn |2 muss selbstverständlich
immer 1 ergeben und somit verlieren die niedrigeren Spektralkoeffizienten an Wert, sobald genug Energie
auf die höheren verteilt wird. Dabei fällt auf, dass ein Spektralkoeffizient |cn | genau dann beginnt an Wert
zu verlieren, wenn sich sein Graph mit dem des letztniedrigeren, also |cn−1 |, schneidet. Dies ist eine Konsequenz aus der Poissonverteilung der Eigenzustände. Die Wahl einer höheren Anregungsamplitude hätte
zur Folge, dass die Spektralkoeffizienten schneller ansteigen und die niedrigeren schneller wieder abfallen.
Die Energie würde dann schneller auf höhere Energieniveaus verteilt und es würde unwahrscheinlicher, den
Oszillator in einem niedrigen Energieniveau anzutreffen. Dabei ist noch zu erwähnen, dass, da es sich um
kohärente und damit Poisson-verteilte Zustände handelt, die Aufteilung auf die cn nur von α und damit von
der Gesamtenergie abhängt.
Ein anderes Bild ergibt sich, wenn man den Oszillator, wie im unteren Graph in Abbildung 5.2 abgebildet,
langsamer als die Resonanzfrequenz anregt. Hier wurde mit AS = 1 wieder eine weit höhere maximale Anregungsamplitude gewählt. Mit steigender Anregungsamplitude nimmt |c0 | ab, oszilliert aber auch zunehmend.
Passend dazu nimmt |c1 | zu und oszilliert gegenphasig. Bei t = 100 und maximaler Anregungsamplitude
haben dann alle dargestellten Spektralkoeffizienten einen von null verschiedenen Wert. Mit abfallender Anregungsamplitude stellen sich wieder die bereits bei den Erwartungswerten erkennbaren Oberschwingungen
ein und ab ca. t = 120 teilen sich die ersten drei und ab ca. t = 140 die ersten beiden Spektralkoeffizienten
fast die gesamte Energie auf. Dabei hat |c1 |2 letztendlich einen Wert von ca. 0,1. Durch diese Anregung wird
der Oszillator also mit einer Wahrscheinlichkeit von ca. 10% in das zweite Energieniveau gehoben.
43
1
0,8
|c0 (t)|2
|c2 (t)|2
|c4 (t)|2
h x̂i(t)
0,6
0,4
|c1 (t)|2
|c3 (t)|2
|c5 (t)|2
0,2
0
−0,2
−0,4
0
20
40
60
80
100
t
120
140
160
180
200
0
20
40
60
80
100
t
120
140
160
180
200
1
0,8
0,6
0,4
0,2
0
−0,2
−0,4
Abbildung 5.2: Exakte Spektraldarstellung des Zustandes des getriebenen quantenmechanischen Oszillators: Resonanzfall ωS = 1 und AS = 0,1 (oben), Anregung schneller als Resonanzfrequenz
ωS = 1,8 und AS = 1 (unten)
44
5.2 Störungstheorie
Wir werden nun die exakten Ergebnisse mit den störungstheoretischen Ergebnissen vergleichen. In
Abschnitt 2.2.3 wurde bereits dargelegt, dass sich in Störungstheorie erster Ordnung nur der Spektralkoeffizient c1 ändert. Somit vergleichen wir auch die exakten und störungstheoretischen Ergebnisse nur für
diesen einen Spektralkoeffizienten (2.82).
In Abbildung 5.3 sind jeweils die Betragsquadrate dieses Spektralkoeffizienten |c1 |2 in exakter Berechnung und Störungstheorie eingezeichnet. Dabei wurden verschiedene Werte für AS und ωS verwendet. Man
sieht, dass die Werte für kleine Beträge sehr gut übereinstimmen. Das ist genau das Ergebnis, das wir in Störungstheorie erwartet haben. Wir haben angenommen, dass die Störung klein ist und somit muss auch die
durch die Störung verursachte Anregung des Oszillators in höhere Energieniveaus klein sein. Dies ist entweder der Fall, wenn wie im oberen linken Graphen (AS = 0,02 und ωS = 1) die Anregungsamplitude sehr
klein ist, oder wie in den beiden unteren Graphen, nicht mit der Resonanzfrequenz angeregt wird, und somit
nicht so viel Energie auf den Oszillator übertragen werden kann. Im unteren rechten Graphen weicht der
störungstheoretische Wert für |c1 | zwar bei hoher Anregungsamplitude sehr stark vom exakten Wert ab und
wird viel zu groß, nach der Anregung stimmt der Wert dann aber wieder relativ gut. Aus dem linken oberen
Graphen kann man ablesen, dass die Werte bis zu |c1 |2 ≈ 0,04 übereinstimmen. Im oberen rechten Graphen
sieht man, was passiert, wenn die Annahme der relativ kleinen Störung nicht erfüllt ist: der störungstheoretische Wert wächst während der Anregung stetig bis zu einer Wahrscheinlichkeit von 200% an, während
der exakte Wert schon wieder leicht abfällt. Eine Wahrscheinlichkeit von mehr als 100% ist unphysikalisch
und für diese Ausgangsparameter versagt also die Störungstheorie. Im Gegensatz dazu ist im Graphen unten
links die Anregunsamplitude klein und zusätzlich ist kein Resonazfall gegeben. Hier sind dann beide Werte
sehr klein und stimmen fast exakt überein. Das Versagen der störungstheoretischen Berechnung bei großen
Werten von |c1 |2 lässt sich auch erkennen, wenn man die Formel mit der exakten Formel vergleicht. Der
Störungstheoretische Wert für |c1 |2 entspricht nämlich genau dem Betragsquadrat von α(t) in der exakten
Berechnung. Um den exakten Wert für |c1 |2 zu erhalten wird aber die Poissonverteilung mit |α|2 verwendet,
es taucht also ein zusätzlicher Exponentialfaktor auf und es gilt:
|c1,Stör. (t)|2 = |α(t)|2
2
|c1,exakt (t)|2 = e−|α(t)| |α(t)|2
(5.2)
2
Für kleine Werte von |α(t)|2 und damit auch kleine Werte der beiden |c1 (t)|2 gilt e−|α(t)| ≈ 1 und dann
stimmt die störungstheoretische Näherung in etwa mit dem exakten Wert überein. Für größere Werte ist die
Exponentialfunktion jedoch kleiner als 1 und die Näherung gilt nicht mehr.
45
Resonanzfall ωS = 1:
AS = 0,02
0,08
2
0,06
1,5
0,04
1
0,02
0,5
0
0
0
50
100
t
150
200
AS = 0,1
|c1 (t)|2 (Stör.)
|c1 (t)|2 (exakt)
FS (t)
0
50
100
t
150
200
150
200
Anregung langsamer als Resonanzfrequenz ωS = 0,7:
AS = 0,1
AS = 1
0,02
2
0,02
1,5
0,01
1
0,01
0,5
0
0
0
50
100
t
150
200
0
50
100
t
Abbildung 5.3: Vergleich des zweiten Spektralkoeffizienten |c1 |2 in Störungstheorie erster Ordnung mit dem
exakten Resultat (treibende Kraft FS (t) nicht maßstabsgetreu)
46
5.3 Numerische Methoden
5.3.1 Programm
Abbildung 5.4: Screenshot des Programs
Im Zuge dieser Bachelorarbeit wurde ein Programm entwickelt, das die hier vorgestellten numerischen
und analytischen Resultate berechnen und darstellen kann. Dazu wurde die Programmiersprache C++ und
zur Ausgabe die Microsoft Foundation Classes (MFC) verwendet. Bis auf das bereits erwähnte JacobiVerfahren wurde das gesamte Programm selbst geschrieben. Abbildung 5.4 zeigt die Benutzeroberfläche.
Auf der linken Seite finden sich alle Eingabeparameter, wie z.B. die Eigenfrequenz ω0 oder die Zeitschrittweite ∆t.
Im mittleren Teil wird der zuletzt berechnete Zustand angezeigt. Ganz oben wird die klassische Position
des Massepunktes auf der x-Achse dargestellt. In der Mitte wird die quantenmechanische Wellenfunktion,
in orange für den Realteil und in pink für den Imaginärteil, und ihr Betragsquadrat in rot angezeigt. Dabei
kann man die Basis auf der rechten Seite auswählen. Zusätzlich können der exakte Wert für die klassische
Position (blau) und die exakten (ebenfalls blau) und störungstheoretischen (grün) Wellenfunktionen eingeblendet werden. Die Graphen verwenden dabei keine Einheiten, da sich alle berechneten Werte in Dateien
exportieren lassen, um sie später weiterzuverarbeiten. Dazu gehört z.B. auch die Eigenzustände des anharmonischen Oszillators. Im unteren Teil wird die treibenden Kraft FS im zeitlichen Verlauf visualisiert, die
t-Achse verläuft nach rechts und die Kraft ist nach oben bzw. unten aufgetragen.
Auf der rechten Seite werden einige der berechneten Werte angezeigt, unter anderem die Mittelwerte des
Ortes und der Energie und die Spektraldarstellung der Wellenfunktion. Hier wird im Folgenden mit diesen
exportierten Werten gearbeitet.
Ohne, dass das Programm dabei allzu aufwändig optimiert werden musste, laufen die Berechnungen mit
geeigneten Parametern in durchaus akzeptablem Tempo ab. Das Programm funktioniert auch auf leistungsschwächeren Computern reibungslos.
47
5.3.2 Instabilität
In Kapitel 4.1.1 hatten wir uns bereits theoretisch mit der Stabilität des expliziten Euler-Verfahrens beschäftigt und festgestellt, dass es für unser Problem nur bedingt geeignet ist. Es soll nun an einem konkreten
Beispiel aufgezeigt werden, welche Auswirkungen die Instabilität eines numerischen Verfahrens auf das
Ergebnis hat.
Klassisch
Wir verwenden dazu im klassischen Fall den ungetriebenen harmonischen Oszillator mit x(0) = 1 und stellen
die beiden Euler-Verfahren in Abbildung 5.5 gegenüber.
Man erkennt, dass für das explizite Euler-Verfahren die Schwingungsamplitude immer mehr zunimmt.
Dies setzt sich auch weiter fort und der Oszillator gewinnt somit immer mehr an Energie. Das ist physikalisch nicht sinnvoll, da die Energie des Oszillators ohne externe Kraft nicht zunehmen darf. An der exakten
Lösung sieht man, dass für einen ungedämpften Fall, wie wir ihn hier untersuchen, die Schwingungsamplitude konstant bleiben sollte. Verringert man die Zeitschrittweite ∆t, so stimmt die Lösung des expliziten
Euler-Verfahrens besser mit dem exakten Ergebnis überein, aber die Amplitude nimmt immer noch etwas
zu. Im Gegensatz dazu wird beim impliziten Euler-Verfahren die Amplitude mit der Zeit kleiner. Auch das
ist nicht korrekt, da eben keine Dämpfung vorliegt. Durch verkleinern der Zeitschrittweite kann man auch
hier bessere Ergebnisse erzielen. Beide Verfahren ergeben ab einem ∆t von ca. 0,001 in diesem Szenario
und der betrachteten Zeitspanne schließlich brauchbare Ergebnisse.
4
2
0
−2
∆t = 0,05, explizit
∆t = 0,05, implizit
−4
0
5
10
15
∆t = 0,01, explizit
exakt
20
25
30
t
35
40
45
50
55
60
Abbildung 5.5: Auslenkung x(t) des ungetriebenen harmonischen Oszillators mit x(0) = 1, berechnet mit
dem expliziten bzw. impliziten Euler-Verfahren
Quantenmechanisch
Um die Stabilität der quantenmechanischen Berechnung zu untersuchen, verwenden wir den harmonischen
Oszillator im Grundzustand. Klassisch bewegt sich das System nicht, wenn der Massepunkt sich mit v = 0
in der Ruhelage x = 0 befindet. Quantenmechanisch bleibt nur das Betragsquadrat der Wellenfunktion
konstant, die Phase der Wellenfunktion selbst „dreht“ sich allerdings mit der Kreisfrequenz − E~0 = − 21 ω0
und wir müssen hier somit keine Auslenkung annehmen um die Stabilität zu untersuchen.
Startet man die Berechnung mit dem expliziten Euler-Verfahren, ∆t = 0,05, ∆x = 0,01 und der Dreipunktformel für die Ableitung in Ortsbasis, so fällt sofort auf, dass die Wellenfunktion schon nach wenigen
Iterationsschritten (ca. 6) an den Rändern des berechneten Bereichs xmin und xmin + n∆x anwächst und in
der Mitte verschwindet. Zusätzlich setzen am Rand chaotische Oszillationen ein, die sich langsam zur Mitte
48
hin ausbreiten. Dieses Verhalten ist physikalisch nicht sinnvoll. Abbildung 5.6 zeigt das entstandene Bild
bei t = 10, also nach 200 Iterationsschritten. Man könnte nun annehmen, dass es z.B. aufgrund des doch
relativ großen ∆x, oder weil wir den Rand im Hamiltonoperator einfach abgeschnitten haben, zu diesem
Fehler kommt. Verwendet man jedoch das implizite Euler-Verfahren und ansonsten gleiche Parameter, so
ergibt sich ein Graph, der in Abbildung 5.6 nicht vom Graph des exakten Ergebnisses zu unterscheiden ist.
Verkleinert man ∆x oder wählt eine höhere Ordnung für die Näherung der Ableitung, verschlechtert sich
das Ergebnis für das explizite Euler-Verfahren nur. Durch Verkleinerung von ∆t kann man die Simulation
eine gewisse Zeit lang stabil halten. Man muss allerdings einen Wert von nur 0,00005 wählen, damit die
Wellenfunktion bis t = 10 nicht kollabiert. Sie kollabiert dann allerdings bei ca t = 15. Auch das klassische
Runge-Kutta-Verfahren zeigt für ∆t = 0,05 das gleiche Verhalten. Hier kann man mit kleinerem ∆t das
Ergebnis aber deutlich verbessern: durch die höhere Ordnung des Verfahrens (vierte Ordnung) muss man
bei weitem keine so kleinen Zeitschritte wählen, sondern erhält schon für ∆t = 0,01 eine stabile Simulation.
Diese bleibt dann auch nach sehr langer Zeit t stabil, obwohl das Verfahren explizit ist.
Auch eine Berechnung in der Eigenbasis hilft bei einem expliziten Verfahren nicht weiter. Ein einzelner Eigenzustand lässt sich zwar stabil simulieren, sobald allerdings eine kleine Anregung hinzukommt,
kollabiert der Zustandsvektor wieder ins Chaos.
Im Gegensatz dazu bleiben die vorgestellten impliziten Verfahren sogar für unsinnig große Zeitschrittweiten, z.B. ∆t = 5, stabil. Es ergeben sich zwar bei externer Anregung chaotisch aussehende Wellenfunktionen,
die sich dann wieder in den Grundzustand zurück entwickeln. Dadurch verliert das angeregte System seine
Energie, was, wie schon erwähnt, nicht korrekt ist, aber es bleibt selbst für so große ∆t eine physikalisch
plausible Wellenfunktion erhalten.
0,5
0
Realteil
Realteil (exakt)
−0,5
−5
−4
−3
−2
−1
Imaginärteil
Imaginärteil (exakt)
0
x
1
2
3
4
5
Abbildung 5.6: Instabilität des expliziten Euler-Verfahrens mit ∆t = 0,05 beim quantenmechanischen Oszillator. Dargestellt sind Real- und Imaginärteil der Wellenfunktion zur Zeit t = 10.
5.4 Numerische Ergebnisse für den harmonischen Oszillator
5.4.1 Klassisch
In Abbildung 5.7 sind die numerischen Ergebnisse für drei verschiedene Verfahren und drei verschiedene
Anregungsfrequenzen dargestellt. Alle numerischen Verfahren liefern ein Ergebnis, das bis auf systematische Abweichungen für große Zeiten mit dem exakten Resultat (siehe Abbildung 5.1) übereinstimmt. Die
Euler-Verfahren mit ∆t = 0,01 zeigen ein ähnliches Verhalten wie in Abbildung 5.5: das explizite EulerVerfahren liefert mit der Zeit eine zu große und das implizite Euler-Verfahren eine zu kleine Amplitude.
Auffällig ist hier noch, wie gut die Ergebnisse des Runge-Kutta-Verfahrens sind. Es wurde das klassische
49
Runge-Kutta-Verfahren mit einer Zeitschrittweite von ∆t = 0,1 verwendet. Das ist 10 mal so viel wie die
Zeitschrittweite der Euler-Verfahren in der Abbildung. Und trotzdem liefert das Runge-Kutta-Verfahren eine Kurve, die nahezu deckungsgleich mit dem exakten Ergebnis ist. Das exakte Ergebnis ist in magenta
eingezeichnet, ist aber unter dem, in blau eingezeichneten, Ergebnis des Runge-Kutta-Verfahrens kaum zu
erkennen.
50
20
10
0
∆t = 0,01, expl. Euler
∆t = 0,01, impl. Euler
∆t = 0,1, kl. Runge-Kutta
−10
exakt
FS (t)
−20
0
20
40
60
80
100
t
120
140
160
180
200
0
20
40
60
80
100
t
120
140
160
180
200
0
20
40
60
80
100
t
120
140
160
180
200
2
1
0
−1
−2
0,4
0,2
0
−0,2
−0,4
Abbildung 5.7: Auslenkung des getriebenen harmonischen Oszillators mit verschiedenen numerischen Verfahren, Resonanzfall ωS = 1 (oben), Anregung langsamer als Resonanzfrequenz ωS = 0,7
(Mitte), Anregung schneller als Resonanzfrequenz ωS = 1,8 (unten)
51
5.4.2 Quantenmechanisch
Wie bereits in Abschnitt 4.4 beschrieben, muss man sich bei einer quantenmechanischen Berechnung für
eine Basis entscheiden. Wir werden hier die Besetzungszahlbasis und die Ortsbasis betrachten. Die exakte
Darstellung in der Besetzungszahlbasis haben wir in Kapitel 5.1 bereits ausgerechnet. Somit können wir die
Genauigkeit der numerischen Berechnungen überprüfen. In den Abbildungen 5.8 und 5.9 sind für den Resonanzfall und eine Anregung langsamer als die Resonanzfrequenz die ersten vier Spektralkoeffizienten für
verschiedene numerische Verfahren aufgetragen. In Abbildung 5.10 sind die dazugehörigen Erwartungswerte hĤi(t) und h x̂i(t) dargestellt. Wir werden im Folgenden die Genauigkeit der einzelnen Verfahren nochmals
unter die Lupe nehmen. Hier betrachten wir nun kurz, welche Besonderheiten bei der numerischen Behandlung des quantenmechanischen harmonischen Oszillators mit den unterschiedlichen Verfahren auftreten. Die
Zeitschrittweiten ∆t wurden so gewählt, dass auf den Diagrammen die einzelnen Verfahren unterscheidbar
sind. Dem entsprechend sind die Werte für ∆t relativ groß.
Sieht man sich den Resonanzfall an, so fällt sofort auf, dass das implizite Euler-Verfahren hier ebenfalls nicht sonderlich gut geeignet ist. Es ist im Gegensatz zum expliziten Euler-Verfahren (siehe Kapitel
5.3.2) zwar stabil, weicht jedoch, wie auch im klassischen Fall extrem schnell vom exakten Wert ab. Und
das, obwohl eine im Vergleich zu den anderen Verfahren extrem kleine Zeitschrittweite gewählt wurde. Die
niederenergetischen Zustände |c0 | und |c1 | werden also bei abklingender Anregung ab ca. t = 140 wieder
mit steigender Wahrscheinlichkeit besetzt. Da es sich um Anregung mit Resonanzfrequenz handelt, dürfte
dies nicht der Fall sein, es handelt sich um ein Artefakt der numerischen Berechnung. Auch die implizite
Mittelpunktmethode ist in diesem Beispiel nicht sonderlich genau: die Zustände |c2 | und |c3 | werden zu stark
besetzt. Außerdem erkennt man, dass die Kohärenz des Zustandes mit fortschreitender Zeit nicht mehr gegeben ist. Eine Folge davon ist die Phasenverschiebung von h x̂i(t), die in Abbildung 5.10 zu erkennen ist. Man
beachte aber, dass hier eine sehr große Zeitschrittweite ∆t = 0,1 verwendet wurde. Verringert man diese,
so lassen sich ohne weiteres sehr genaue Ergebnisse erreichen. Das klassische Runge-Kutta- und das GaußLegendre-Verfahren sind hier auch bei sehr geringer Zeitschrittweite erstaunlich genau. Wie schon im klassischen Fall sind die beiden Graphen, zumindest für die hier dargestellten Spektralkoeffizienten, mit denen
des exakten Ergebnisses nahezu deckungsgleich. In Abbildung 5.10 erkennt man aber, dass der Zeitschritt
für das Gauß-Legendre-Verfahren grenzwertig ist: auch hier ist die Kohärenz nicht mehr hundertprozentig
gegeben. Bei Anregung langsamer als Resonanzfrequenz funktioniert das implizite Euler-Verfahren besser,
ansonsten ändert sich nichts wesentlich. Hier wurden nur die ersten vier Spektralkoeffizienten betrachtet.
Für höhere Energieniveaus „dreht“ sich die Wellenfunktion schneller und man muss, damit die Ergebnisse
genau genug bleiben, die Zeitschrittweite verkleinern. Dies ist auch der Grund warum die Kohärenz der
Wellenfunktion für so große ∆t über längere Zeiten nicht erhalten bleibt.
52
1
|c0 (t)|2
0,5
0
0
0,4
20
40
60
80
100
t
120
140
160
180
200
40
60
80
100
t
120
140
160
180
200
40
60
80
100
t
120
140
160
180
200
40
60
80
100
t
120
140
160
180
200
|c1 (t)|2
0,2
0
0
0,3
20
|c2 (t)|2
0,2
0,1
0
0
0,2
20
|c3 (t)|2
0,1
0
0
20
∆t = 0,002, impl. Euler
∆t = 0,1, kl. Runge-Kutta
∆t = 0,1, impl. Mittelpunkt
∆t = 0,3, Gauß-Legendre 2
exakt
FS (t)
Abbildung 5.8: Die ersten vier Spektralkoeffizienten des getriebenen harmonischen Oszillators im Resonanzfall ωS = 1 für verschiedene numerische Verfahren. Die maximale Amplitude der treibenden Kraft ist AS = 0,1.
53
1
|c0 (t)|2
0,5
0
0
0,4
20
40
60
80
100
t
120
140
160
180
200
40
60
80
100
t
120
140
160
180
200
40
60
80
100
t
120
140
160
180
200
40
60
80
100
t
120
140
160
180
200
|c1 (t)|2
0,2
0
0
0,3
20
|c2 (t)|2
0,2
0,1
0
0
0,2
20
|c3 (t)|2
0,1
0
0
20
∆t = 0,002, impl. Euler
∆t = 0,1, kl. Runge-Kutta
∆t = 0,1, impl. Mittelpunkt
∆t = 0,3, Gauß-Legendre 2
exakt
FS (t)
Abbildung 5.9: Die ersten vier Spektralkoeffizienten des getriebenen harmonischen Oszillators bei Anregung langsamer als Resonanzfrequenz ωS = 0,7 für verschiedene numerische Verfahren.
Die maximale Amplitude der treibenden Kraft ist AS = 1.
54
2,5
hĤi(t)
2
1,5
1
0,5
0
2
20
40
60
80
100
t
120
140
160
180
200
160
165
170
175
t
180
185
190
195
200
40
60
80
100
t
120
140
160
180
200
160
165
170
175
t
180
185
190
195
200
h x̂i(t)
0
−2
150
155
hĤi(t)
2,5
2
1,5
1
0,5
0
0,5
20
h x̂i(t)
0
−0,5
150
155
∆t = 0,002, impl. Euler
∆t = 0,1, kl. Runge-Kutta
∆t = 0,1, impl. Mittelpunkt
∆t = 0,3, Gauß-Legendre 2
exakt
FS (t)
Abbildung 5.10: Erwartungswerte hĤi(t) und Ausschnitte von h x̂i(t) für ωS = 1 und AS = 0,1 (obere zwei)
und ωS = 0,7 und AS = 1 (untere zwei) zu den verschiedenen numerischen Verfahren
55
Ortsbasis
Um die Berechnung in Ortsbasis durchzuführen, muss man zusätzlich zum numerischen Verfahren eine Näherung für die Ortsableitung wählen. Siehe dazu Kapitel 4.4.1. Für kleinere Ordnungen und kleinere ∆x
dieser Näherung wird das Ergebnis erwartungsgemäß ungenauer. Eine zu schlechte Näherung hat insbesondere zur Folge, dass die Wellenfunktion mit der Zeit ihre Kohärenz verliert. Ein kohärenter Zustand in
Ortsdarstellung ist hier der um den Ortsmittelwert verschobene Grundzustand (siehe [Mab07]). Ist diese
Kohärenz nicht mehr gegeben, entwickeln sich neben dem Hauptmaximum kleinere Nebenmaxima. Die Simulation ist dann zu ungenau und auch die Erwartungswerte liefern keine vernünftigen Resultate mehr. In
Abbildung 5.11 sind die Wellenfunktionen für vier verschiedene Näherungen zum Zeitpunkt t = 220 dargestellt. Man sieht, dass man entweder eine Näherung hoher Ordnung oder ein kleines ∆x verwenden muss,
um die nötige Genauigkeit zu erhalten. Im nächsten Abschnitt werden wir auch verschiedene Näherungen
qualitativ auf ihre Genauigkeit untersuchen.
56
0,6
3-Punkt-Formel, ∆x = 0,2
numerisch
exakt
0,4
0,2
0
−5
0,6
−4
−3
−2
−1
0
x
1
2
3
4
5
−1
0
x
1
2
3
4
5
−1
0
x
1
2
3
4
5
−1
0
x
1
2
3
4
5
5-Punkt-Formel, ∆x = 0,2
0,4
0,2
0
−5
0,6
−4
−3
−2
5-Punkt-Formel, ∆x = 0,4
0,4
0,2
0
−5
0,6
−4
−3
−2
9-Punkt-Formel, ∆x = 0,4
0,4
0,2
0
−5
−4
−3
−2
Abbildung 5.11: Betragsquadrat der Wellenfunktion des getriebenen harmonischen Oszillators zur Zeit
t = 220 für verschiedene Näherungen der Ortsableitung (mit Gauß-Legendre-Verfahren
vierter Ordnung zur Zeitentwicklung, ωS = 1, AS = 0,1, ∆t = 0,1)
57
5.4.3 Genauigkeit
Bisher haben wir die Resultate der numerischen Berechnung nur qualitativ betrachtet. Dabei war teilweise
schon auf den ersten Blick aus den Diagrammen zu entnehmen, wann ein Verfahren relativ genaue Ergebnisse liefert und wann es versagt. Wir wollen dies nun in Zahlen fassen und genau untersuchen für welche
Parameter welche Verfahren geeignet sind. Dazu benötigen wir zuerst ein Maß für die Genauigkeit bzw. den
Fehler einer Berechnung. Im klassischen Fall berechnet das Programm den maximalen Fehler der Auslenkung in jedem Zeitschritt. Um die Ergebnisse vergleichbar zu machen, berechnet man daraus den relativen
Fehler δ x durch Skalierung mit der inversen maximalen Auslenkung:
max |xi − x(t0 + i∆t)|
δx =
(5.3)
max |x(t0 + i∆t)|
Dabei ist xi die Position aus der numerischen Berechnung nach dem i-ten Iterationsschritt, also zum Zeitpunkt t = t0 + i∆t und x(t0 + i∆t) die exakte Position zu diesem Zeitpunkt. Nun könnten wir um den Fehler
der quantenmechanischen Berechnung zu erhalten in diese Formel schlicht die Erwartungswerte einsetzen.
Dies wäre aber wenig sinnvoll, da die Erwartungswerte nur einen Bruchteil der Information über das System
enthalten. Stattdessen werden wir den Fehler der Wellenfunktion wie folgt berechnen:
δψ,i = hψi | − hψ(t0 + i∆t)| |ψi i − |ψ(t0 + i∆t)i =
n X
ψ − ψ(t + ∆t,x + j∆x)2
in Ortsbasis: = ∆x
ij
0
min
in Besetzungszahlbasis: =
j=0
n
X
ψ − c (t + ∆t)2
ij
j 0
j=0
δψ = max δψ,i
(5.4)
Wir bilden also den Erwartungswert der Abweichung. Dabei ist ψi analog zu (5.3) der numerisch berechnete
Zustand zur Zeit t = t0 + i∆t und ψ(t0 + i∆t) der exakte Zustand. Da die Wellenfunktionen immer normiert
sind, ist auch die Abweichung normiert. Diese Berechnung der Fehlers hat einerseits den Vorteil, dass alle
Komponenten des Zustandsvektors mit gleichem Gewicht eingehen, und andererseits spielt auch der Phasenfaktor eine Rolle. Würde man nur die Betragsquadrate, z.B. der Spektralkoeffizienten, vergleichen, so
würde man damit Phasenfaktoren vernachlässigen. Verwenden wir in (5.4) die Ortsbasis, stehen wir vor
dem Problem, dass wir die exakte Wellenfunktion ψ(t,x) bisher nicht explizit berechnet haben. Um diese
auszurechnen, setzen wir hier die Spektraldarstellung mit bekannten Koeffizienten cn (t) und Eigenfunktionen |ψn i ein und brechen bei N ab. Damit ist ψ(t,x) streng genommen nicht exakt, bei genügend großem N
für unsere Zwecke jedoch vollkommen ausreichend.
In Tabelle 5.1 sind für den klassischen Fall für verschiedene numerische Verfahren die relativen Fehler
und die zur Berechnung benötigten Zeiten eingetragen. Die Zeiten wurden dabei auf einem Intel Core i72720QM gemessen und dienen als Richtwert. Wie zu erwarten war, schneiden die Euler-Verfahren sehr
schlecht ab, und schon ab einer Zeitschrittweite von ca. 0,001 liefern sie mit einem relativen Fehler von
65% bzw. 39% nur noch sehr ungenaue Ergebnisse. Verwendet man noch größere Zeitschritte versagen
die Euler-Verfahren vollkommen. Das Runge-Kutta-Verfahren liefert bei einem Zeitschritt von ∆t = 0,001
das mit Abstand beste Ergebnis. Der relative Fehler liegt in der Größenordung 10−8 . Auffällig ist, dass
sich der Fehler bei einer weiteren Verringerung der Zeitschrittweite wieder vergrößert. Es überwiegen dann
also Ungenauigkeiten in den Gleitkommaberechnungen des Programms. Die zur Berechnung benötigte Zeit
steigt für jedes Verfahren logischerweise linear mit ∆t. Vergleicht man die zur Berechnung nötige Zeit und
die resultierenden Fehler, bestätigen sich unsere Erwartungen: das Runge-Kutta-Verfahren liefert bei richtig
gewähltem ∆t in sehr viel kürzerer Zeit sehr viel genauere Ergebnisse als die Euler-Verfahren.
Um die Genauigkeit bei den quantenmechanischen Verfahren zu berechnen, wählen wir bei den verwendeten Parametern in der Ortsbasis jeweils N = 15. Dies reicht aus, damit höherenergetische Energieniveaus
58
∆t
Verfahren
0.0001
0.001
0.01
10−2
expl. Euler
Fehler
Zeit [s]
5,13 ·
2,57
0,65
0,26
148,62
2,54 · 10−2
impl. Euler
Fehler
Zeit [s]
4,88 · 10−2
5,27
0,39
0,52
0,99
5,24 · 10−2
kl. Runge-Kutta
Fehler
Zeit [s]
2,51 · 10−7
9,54
2,36 · 10−8
0,95
8,23 · 10−8
9,58 · 10−2
0.1
0.2
8,31 · 10−4
9,56 · 10−3
1,33 · 10−2
4,75 · 10−3
Tabelle 5.1: Maximaler relativer Fehler und zur Berechnung nötige Zeit bis t = 2000 beim klassischen
harmonischen Oszillator für verschieden numerische Verfahren (AS = 0,1, ωS = 1, B = 0,05,
tS = 1000)
Verfahren
∆t
0.0001
0.001
0.01
impl. Euler
Fehler
Zeit [s]
9,01 · 10−2
139,02
0,8
13,05
1,26
1,34
impl. Mittelp.
Fehler
Zeit [s]
2,78 · 10−5
32,21
0,18
2,97
2,95
0,29
Trapezm.
Fehler
Zeit [s]
2,78 · 10−5
33,1
0,18
2,95
2,94
298,55
kl. Runge-Kutta
Fehler
Zeit [s]
4,54 · 10−10
38,46
5,7 · 10−8
3,85
0,2
0,44
Gauß-Legendre 2
Fehler
Zeit [s]
4,54 · 10−10
361,02
2,02 · 10−9
33,44
5,92 · 10−2
3,31
0.1
0.2
0,73
1,69
Tabelle 5.2: Maximaler relativer Fehler und zur Berechnung nötige Zeit bis t = 2000 beim quantenmechanischen harmonischen Oszillator in der Besetzungszahlbasis für verschieden numerische
Verfahren (N = 15, AS = 0,1, ωS = 1, B = 0,05, tS = 1000)
59
nicht mehr ins Gewicht fallen. In Tabelle 5.2 sind die Fehler und dazugehörigen Berechnungszeiten eingetragen. Es ergibt sich ein ähnliches Bild wie bei der klassischen Berechnung: das implizite Euler-Verfahren
liefert nur für extrem kleine ∆t akzeptable Näherungen, ist aber selbst für das kleinste betrachtete ∆t mit
einem relativen Fehler in der Größenordnung 10−2 immer noch recht ungenau. Die implizite Mittelpunktund die Trapezmethode, also die Verfahren zweiter Ordnung, liefern für das 10-fache ∆t mit einem relativen Fehler der Größenordnung 10−5 schon deutlich bessere Ergebnisse. Sie benötigen dabei weniger als
ein Viertel der Zeit. Dies setzt sich für die Verfahren vierter Ordnung fort. Dabei liefern sowohl das klassische Runge-Kutta- als auch das verwendete Gauß-Legendre-Verfahren eine maximale Genauigkeit von
ca 4,5 · 10−10 . In diesem Bereich kommen dann wieder die Ungenauigkeiten der Gleitkommaberechnung
zum Tragen. Noch zu erwähnen ist, dass das Runge-Kutta-Verfahren für ∆t > 0,1 instabil wird und die
Wellenfunktion kollabiert.
In Abbildung 5.12 (links) sind die relativen Fehler zweier Verfahren gegen die Zeitschrittweite aufgetragen. Man sieht deutlich, dass sich für sehr kleine und große Werte Sättigungen einstellen und die Werte
nicht mehr genauer bzw. ungenauer werden. Für kleine ∆t liegt dies, wie bereits erwähnt, an der Gleitkommaberechnung mit doppelter Genauigkeit. Die Sättigung für große ∆t resultiert aus der Normierung der
Wellenfunktion, die den maximalen Fehler begrenzt. Es fällt aber auch auf, dass die Fehler dazwischen in
etwa proportional zu ∆tγ sind, es sich also im doppelt-logarithmischen Diagramm gerade Linien ergeben.
Für die implizite Mittelpunktmethode gilt in diesem Bereich γ ≈ 3,93 und für das Runge-Kutta-Verfahren
γ ≈ 7,75. Das entspricht in beiden Fällen in etwa der doppelten Ordnung des Verfahrens. Der Faktor 2
kommt daher, dass wir die Differenz der Wellenfunktionen in (5.4) quadrieren. Dies passt zu den Fehlerabschätzungen in Kapitel 4.
Näherung
∆x
0.05
3 Punkte
Fehler
Zeit [s]
1,29
455,76
5 Punkte
Fehler
Zeit [s]
7 Punkte
9 Punkte
0.1
0.2
0.4
1,22 · 10−4
603,72
9,15 · 10−3
216,48
0,64
145,62
Fehler
Zeit [s]
2,81 · 10−5
779,82
4,76 · 10−5
388,56
1,02 · 10−2
168
0,99
77,88
Fehler
Zeit [s]
2,78 · 10−5
949,56
2,82 · 10−5
462,48
2 · 10−4
201,84
0,35
103,44
a
Tabelle 5.3: Maximaler relativer Fehler und zur Berechnung nötige Zeit bis t = 2000 beim quantenmechanischen harmonischen Oszillator in Ortsbasis für verschiede Näherungen der Ortsableitung
(∆t = 0,001, xmin = −8, AS = 0,1, ωS = 1, B = 0,05, tS = 1000)
Wir haben nun die ∆t-Abhängigkeit analysiert. Bei der Berechnung in Ortsbasis betrachten wir nun den
relativen Fehler in Abhängigkeit von der gewählten Näherung der Ortsableitung und von ∆x. Sieht man sich
die Werte in Tabelle 5.3 an, so fallen sofort die im Vergleich zu Tabelle 5.2 großen Zeiten auf. Um genaue
Werte zu erhalten muss ∆t sehr klein sein. Außerdem muss mit den x j der gesamte Bereich abgedeckt werden, in dem sich die Wellenfunktion befinden wird. Dies ist für die verwendeten Parameter ungefähr das
Intervall [−8; 8]. Bei einem ∆x von beispielsweise 0,1 ergibt sich somit für n = 161. Das in einem Iterationsschritt zu lösende Gleichungssystem ist also um mehr als ein 10-faches größer als bei der Berechnung in
Besetzungszahlbasis. Auch wenn es nur dünn besetzt ist, steigt die Berechnungszeit damit drastisch an. Bei
Wahl einer hohen Ordnung für die Näherung der Ortsableitung kann ∆x zwar größer gewählt werden, aber
es kommt immer noch der Fehler des numerischen Verfahrens, abhängig von ∆t, hinzu. Die maximale Genauigkeit entspricht mit 2,78 · 10−5 ziemlich genau dem relativen Fehler der impliziten Mittelpunktmethode
für ∆t = 0,001 aus Tabelle 5.2. Dies spiegelt sich auch in Abbildung 5.12 (rechts) wieder: auch für kleine
∆x erhält man immer noch einen Fehler der Größenordnung 10−5 . Die Berechnung in Besetzungszahlbasis
60
ist also in jedem Fall vorzuziehen. Außerdem fällt auf, dass das Runge-Kutta-Verfahren hier sehr ungeeignet ist: möchte man bei dessen Verwendung ∆x verkleinern, so wird es sehr schnell instabil und auch ∆t
muss verkleinert werden, die Berechnungszeit steigt damit weiter an. Deshalb wurde hier auch die implizite
Mittelpunktmethode verwendet.
100
100
10−2
10−1
10−4
10−2
10−6
10−3
10−8
10−4
10−10
10−3
10−2
∆t
impl. Mittelpunktmethode
kl. Runge-Kutta
10−1
10−5
10−1,2
10−1
10−0,8 10−0,6 10−0,4
∆x
3 Punkte
7 Punkte
5 Punkte
9 Punkte
Abbildung 5.12: ∆t-Abhängigkeit des Fehlers bei Berechnung in Besetzungszahlbasis (links),
∆x-Abhängigkeit des Fehlers bei Berechnung in Ortsbasis mit ∆t = 0,001 und der
impliziten Mittelpunktmehtode (rechts)
5.5 Anharmonischer Oszillator
Alle Ergebnisse, die wir bisher erhalten haben, konnten mit analytisch exakten Resultaten verglichen werden. Dies hatte den Vorteil, dass wir die störungstheoretischen und numerischen Resultate auf ihre Korrektheit und auch auf ihre Genauigkeit untersuchen konnten. Es ist jedoch nur bedingt sinnvoll, ein Problem,
dass mit akzeptablem Aufwand exakt gelöst werden kann, numerisch oder störungstheoretisch, und damit
nur ungenau zu lösen. Deswegen werden wir uns nun den anharmonischen Oszillator mit einem Potential
der Form (3.1) ansehen. Für A , 0 kann dieser, wie bereits erwähnt, nicht mehr exakt gelöst werden, weder
klassisch noch quantenmechanisch.
5.5.1 Eigenzustände
Wir betrachten nun die Eigenzustände des anharmonischen Oszillators und zuerst speziell den Grundzustand. Für diesen haben wir mit Störungstheorie erster Ordnung in Gleichung (3.11) eine Näherung berechnet. Im Gegensatz dazu wurde in Kapitel 4.4.3 beschrieben, wie die Eigenzustände numerisch durch
Diagonalisierung des Hamiltonoperators berechnet werden. Abbildung 5.13 zeigt die Ergebnisse für drei
verschiedene Anharmonizitäten. Durch die verwendeten Parameter von ∆x = 0,05 und xmin = −4 in Kombination mit der 9-Punkt-Formel werden die numerischen Eigenzustände sehr genau und dienen deshalb
hier als Referenz. Man erkennt deutlich die Auswirkungen eines A > 0: durch das am Rand schneller
ansteigende Potential wird die Wellenfunktion „zusammengepresst“ und in der Mitte steigt somit die Aufenthaltswahrscheinlichkeit. Im mittleren Bild sieht man außerdem, dass sich bereits für eine vermeintlich
61
kleine Anharmonizität von 0,1 der Grundzustand erkennbar ändert. Der störungstheoretisch korrigierte Eigenzustand weist bereits erste Ungenauigkeiten auf. Für A = 0,5 ist das störungstheoretische Ergebnis erster
Ordnung nicht mehr zu gebrauchen.
In Abbildung 5.14 sind für die Fälle A = 0,1 und A = −1 weitere numerisch berechnete Eigenzustände dargestellt. Führt man die Berechnung mit A = −1 durch, so fällt auf, dass das Ergebnis sehr stark
vom verwendeten xmin abhängt. Für die bisherigen Ergebnisse war die nicht der Fall, xmin musste nur groß
genug sein, dass die Wellenfunktion in den berechneten Bereich fällt. Bei einem negativen A, also einer
abstoßenden Anharmonizität, ist jedoch einer Wellenfunktion, die weit außen eine hohe Aufenthaltswahrscheinlichkeit besitzt, eine sehr niedrige Energie zugeordnet. Der Grund ist, dass das Potential für |x| 0
nach außen hin mit x4 abfällt und somit die potentielle Energie eines Teilchens oder einer Wellenfunktion
niedriger ist, als in der Potentialmulde bei x = 0. Ordnet man nun die Wellenfunktionen nach ihrer Energie,
erhält man das Bild in Abbildung 5.14 unten: der „Grundzustand“ ψ0 (x), also der Zustand, der von den berechneten Zuständen die niedrigste Energie besitzt, liegt fast vollständig im äußeren Bereich. Erst Zustände
mit höherer Energie, z.B. ψ2 (x) entsprechen einer Aufenthaltswahrscheinlichkeit in der Potentialmulde.
62
1
harmonisch
störungstheoretisch
numerisch
V(x)
V(x) (harm)
0,8
0,6
0,4
0,2
0
−2 −1,8−1,6−1,4−1,2 −1 −0,8−0,6−0,4−0,2 0
x
0,2 0,4 0,6 0,8
1
1,2 1,4 1,6 1,8
2
0,2 0,4 0,6 0,8
1
1,2 1,4 1,6 1,8
2
0,2 0,4 0,6 0,8
1
1,2 1,4 1,6 1,8
2
1
0,8
0,6
0,4
0,2
0
−2 −1,8−1,6−1,4−1,2 −1 −0,8−0,6−0,4−0,2 0
x
1
0,8
0,6
0,4
0,2
0
−2 −1,8−1,6−1,4−1,2 −1 −0,8−0,6−0,4−0,2 0
x
Abbildung 5.13: Betragsquadrat der Wellenfunktion im Grundzustand des anharmonischen Oszillators für
A = 0,05 (oben), A = 0,1 (Mitte) und A = 0,5 (unten), numerische Parameter: ∆x = 0,05
und xmin = −4 mit 9-Punkt-Formel
63
1
0,8
ψ0 (x)
ψ2 (x)
ψ0 (x) (harm.)
V(x)
ψ1 (x)
ψ3 (x)
ψ1 (x) (harm.)
V(x) (harm)
0,6
0,4
0,2
0
−2 −1,8−1,6−1,4−1,2 −1 −0,8−0,6−0,4−0,2 0
x
1
0,9
0,2 0,4 0,6 0,8
1
ψ0 (x)
ψ3 (x)
V(x)
1,2 1,4 1,6 1,8
2
ψ2 (x)
ψ4 (x)
V(x) (harm)
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
−2 −1,8−1,6−1,4−1,2 −1 −0,8−0,6−0,4−0,2 0
x
0,2 0,4 0,6 0,8
1
1,2 1,4 1,6 1,8
2
Abbildung 5.14: Ausgewählte Eigenfunktionen des anharmonischen Oszillators mit A = 0,1 (oben) und
A = −1 (unten). Dargestellt ist jeweils die Aufenthaltswahrscheinlichkeit |ψn (x)|2 .
64
5.5.2 Zeitentwicklung
Mit den nun bekannten Eigenzuständen, inklusive Grundzustand, kann nun die Zeitentwicklung numerisch
oder störungstheoretisch durchgeführt werden. Wir beschränken uns hier auf die numerische Lösung.
Beim harmonischen Oszillator erhielt man immer kohärente Zustände. In der Ortsbasis entspricht dies
einem Zustand mit der Form des Grundzustandes, der zeitabhängig um den klassischen Ort des Teilchens
verschoben ist. Beim anharmonischen Oszillator ist dies nicht mehr gegeben. Im Grundzustand ist die Wellenfunktion gemäß Abbildung 5.13 in der Mitte lokalisiert. Sie besitzt ein einzelnes Maximum bei x = 0
und fällt nach außen monoton ab. Wird nun jedoch eine größere Anregung hinzugenommen, so bewegt sich
die Wellenfunktion anfänglich, je nach Anharmonizität, eine gewisse Zeit lang ähnlich wie der harmonische
Oszillator. Es fällt jedoch bald auf, dass die Wellenfunktion an den Rändern „einknickt“ und sich neben
dem Hauptmaximum eines oder mehrere Nebenmaxima bilden. Abbildung 5.15 zeigt einen solchen Fall.
Mit fortschreitender Zeit kann es auch passieren, dass das Hauptmaximum absinkt oder ganz verschwindet
und dafür Nebenmaxima ansteigen. Die lässt sich anschaulich dadurch erklären, dass eine Wellenfunktion,
die sich in Richtung eines Randes bewegt, im Bereich weiter außen schneller abgebremst und wieder zur
Mitte hin beschleunigt wird, als im Bereich, der näher an der Mitte ist. Dadurch ergeben sich Selbstinterferenzeffekte. Es lässt sich hier keine Systematik mehr erkennen.
ψ(t,x)
V(x)
0,6
0,4
0,2
0
−4 −3,5 −3 −2,5 −2 −1,5 −1 −0,5
0
x
0,5
1
1,5
2
2,5
3
3,5
4
Abbildung 5.15: Betragsquadrat der Wellenfunktion des anharmonischen Oszillators mit A = 0,5 und starker Anregung ωS = 1, AS = 10 zum Zeitpunkt t = 232
Erwartungswerte
Da es für genügend große Anregungen kein einzelnes Maximum mehr gibt, macht es auch nur noch wenig
Sinn, den Ortserwartungswert zu analysieren. Wir werden uns also den Energieerwartungswert ansehen. In
Abbildung 5.16 sind Orts- und Energieerwartungswert für verschiedene Anregungsfrequenzen eingezeichnet. Sieht man sich eine harmonische Anregung mit verschiedenen Frequenzen an, bemerkt man, dass es
keine absolute Resonanzfrequenz mehr gibt, es stellt sich also nie eine Resonanzkatastrophe ein, bei der
die Auslenkung bzw. die Energie während der Anregung immer weiter steigt. Dies gilt sowohl für den
klassischen als auch für den quantenmechanischen anharmonischen Oszillator. Es gibt jedoch weiterhin
Frequenzen, bei denen die maximale Auslenkung bzw. maximale Energie besonders hoch ausfallen. Die
Anregungsfrequenzen ωS = 2 und ωS = 2,6 wurden nicht zufällig für die Darstellung ausgewählt. Man
sieht an diesen zwei Beispielen, dass für ωS = 2 der klassische Oszillator eine wesentlich höhere Energie
als der quantenmechanische erhält. Der klassische Ort und der quantenmechanische Ortserwartungswert
stimmen ebenfalls nicht mehr überein. Andererseits ist aber für eine Anregungsfrequenz ωS = 2,6 die Energie im quantenmechanischen Fall weit höher, als bei der klassischen Berechnung, also genau umgekehrt wie
65
bei ωS = 2. Die hier verwendeten numerischen Ergebnisse sind dabei genau genug, als dass dieser Effekt auf
numerische Ungenauigkeiten zurückzuführen wäre. Es liegt also die Vermutung nahe, dass der klassische
und der quantenmechanische anharmonische Oszillator sich ganz erheblich in ihrem dynamischen Verhalten
unterscheiden.
66
2
x(t)
0
−2
0
20
40
60
80
100
t
120
140
160
180
200
20
40
60
80
100
t
120
140
160
180
200
20
40
60
80
100
t
120
140
160
180
200
30
E(t)
20
10
0
0
1
x(t)
0
−1
0
30
E(t)
20
klassisch
quantenmechanisch
10
0
0
20
40
60
80
100
t
120
140
160
180
200
Abbildung 5.16: Ort und Energie beim anharmonischen Oszillator mit A = 0,5 und Anregungsfrequenz
ωS = 2 (obere zwei) und ωS = 2,6 (untere zwei). Die maximale Amplitude der treibenden
Kraft ist jeweils AS = 4.
67
Resonanz
Um dies zu bestätigen oder zu widerlegen wurde in Abbildung 5.17 die maximale Energie im klassischen
und quantenmechanischen Fall gegen die Anregungsfrequenz aufgetragen. Dabei wurde eine harmonische
Anregung gewählt, deren Amplitude zuerst langsam bis zu einem maximalen Wert AS ansteigt, und diese
dann über einen längeren Zeitraum hält. Im klassischen Fall fällt zuerst auf, dass die maximale Energie bis
zu einer Anregungsfrequenz von ωS ≈ 2,5 ansteigt und dann fast schlagartig auf einen relativ niedrigen
konstanten Wert abfällt. Durch die endliche Simulationsdauer von t = 1000 streuen die Energien etwas.
Trotzdem kann man erkennen, dass der quantenmechanische anharmonische Oszillator mit ωS ≈ 2,6 im
Gegensatz zum klassischen anharmonischen Oszillator mit ωS ≈ 2,5 eine etwas höhere Resonanzfrequenz
besitzt. Diese Ergebnisse können, meines Wissens, weder durch analytisch exakte, noch durch störungstheoretische Rechnung erhalten werden. Exakt ist der getriebene anharmonische Oszillator nicht behandelbar
und bei einer Anharmonizität von A = 0,5 liefert auch die Störungstheorie, zumindest in erster Ordnung,
keine sinnvollen Resultate mehr (siehe Abbildung 5.13 unten). Somit hatte die numerische Behandlung hier
durchaus ihre Berechtigung.
klassisch
quantenmechanisch
40
20
0
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
ωS
Abbildung 5.17: Maximale Energie des anharmonischen Oszillators mit A = 0,5 nach t = 1000 in Abhängigkeit von der Anregungsfrequenz ωS bei maximaler Anregungsamplitude AS = 4.
Numerische Parameter: ∆t = 0,005 mit kl. Runge-Kutta-Verfahren für die klassische Berechnung und impl. Mittelpunktmethode für die quantenmechanische Berechnungen.
Repulsive Anharmonizität
Man möchte nun den anharmonischen Oszillator mit A < 0 untersuchen. Das Potential wirkt dann für eine
Wellenfunktion mit Aufenthaltswahrscheinlichkeit in der Ruhelage bei x = 0 als zwei Potentialbarrieren
endlicher Höhe links und rechts. Bedingt durch diese endliche Höhe, tunnelt eine Wellenfunktion aus der
Ruhelage langsam in die äußeren Bereiche und es existieren keine stationären Zustände mehr. Es existieren
jedoch metastabile Zustände, die relativ lange in der Potentialmulde bleiben. Durch Anregung mit einer
externen Kraft kann das Verlassen der Potentialmulde beschleunigt werden. Das nennt man „activated escape“. Versucht man dieses Phänomen mit den vorgestellten numerischen Methoden zu simulieren, stößt man
jedoch auf einige Probleme: da wir den Hamiltonoperator durch eine symmetrische Matrix ausgedrückt haben, ist er immer diagonalisierbar, womit auch immer stationäre Zustände existieren. Verwendet man einen
Anfangszustand, wie beschrieben, mit Aufenthaltswahrscheinlichkeit in der Potentialmulde, regt diesen von
außen an und beobachtet die Zeitentwicklung, zeigt sich anfangs das erwartete Bild und die Wellenfunktion
verlässt langsam die Potentialmulde. Schon nach kurzer Zeit stößt sie jedoch bei Berechnung in Ortsbasis
68
an den Rand des simulierten Bereichs bzw. werden bei Berechnung in Besetzungszahlbasis zu hohe Energieniveaus besetzt. An diesen Punkten wird die Wellenfunktion reflektiert und kann somit den Bereich nicht
verlassen. Es stellt sich ein Gleichgewicht ein, bei dem die Wahrscheinlichkeit, das simulierte Teilchen in
der Potentialmulde anzutreffen immer noch recht hoch ist.
69
6 Zusammenfassung
Im ersten Teil dieser Arbeit wurden die klassischen und quantenmechanischen Grundlagen wiederholt und
die exakte Lösung des getriebenen harmonischen Oszillators hergeleitet. Zusätzlich wurden der harmonische
und der anharmonische quantenmechanische Oszillator in Störungstheorie erster Ordnung untersucht. Um
auch analytisch nicht lösbare Probleme ohne die Annahme einer kleinen Störung relativ genau behandeln
zu können, wurden dann verschiedene numerische Verfahren vorgestellt. Es wurde ein Computerprogramm
geschrieben, mit dem die vorgestellten Verfahren auf den getriebenen harmonischen und anharmonischen
Oszillator angewandt werden können.
Bei der numerischen Untersuchung des harmonischen Oszillators hat sich immer wieder gezeigt, dass
explizite Verfahren, die für den klassischen Fall noch recht gut funktionieren, bei quantenmechanischer Berechnung sehr schnell instabil werden. Die erhaltenen Ergebnisse wurden mit den zuvor berechneten exakten
und störungstheoretischen Resultaten verglichen. Somit konnte einerseits gezeigt werden, für welche Parameter die Störungstheorie in erster Ordnung noch vernünftige Resultate liefert und für welche Parameter sie
versagt. Andererseits wurde damit die Genauigkeit der numerischen Verfahren bestimmt. Dabei konnten wir
feststellen, dass sich Verfahren höherer Ordnung trotz größerem Rechenaufwand für einen einzelnen Iterationsschritt durchaus lohnen und in kürzerer Rechenzeit bessere Ergebnisse liefern als Verfahren niedrigerer
Ordnung. Das Ausmaß der Genauigkeitsverbesserung bei Wahl eines Verfahrens höherer Ordnung hat mich
hier besonders überrascht. Es wurde zudem analysiert, wie sich die Wahl der Basis bei quantenmechanischer Berechnung auf die Genauigkeit und die Rechenzeit auswirkt. Dabei konnte gezeigt werden, dass die
Besetzungszahlbasis des harmonischen Oszillators in den meisten Fällen der Ortsbasis vorzuziehen ist. Die
zusätzlich nötige Diskretisierung des Ortes bei Verwendung der Ortsbasis erhöht die Rechenzeit immens
und verschlechtert dabei die Genauigkeit. Andererseits hat die Ortsbasis den Vorteil, dass ohne weiteren
Aufwand ein beliebiges Potential eingesetzt werden kann.
Für den anharmonischen Oszillator wurden zuerst die quantenmechanischen Eigenzustände numerisch
und störungstheoretisch bestimmt und es zeigte sich, dass die Störungstheorie hier schon relativ schnell sehr
ungenau wird. Da sowohl klassisch als auch quantenmechanisch für den anharmonischen Oszillator mit
harmonischer Anregung keine Resonanzkatastrophe auftritt, wurde die maximale Energie in Abhängigkeit
von der Anregungsfrequenz numerisch untersucht. Es hat sich gezeigt, dass das Maximum der Energie beim
quantenmechanischen anharmonischen Oszillator im Vergleich zum klassischen zu höheren Frequenzen
verschoben ist. Dieses Ergebnis kann nicht analytisch oder in Störungstheorie erster Ordnung hergeleitet
werden und rechtfertigt somit die numerische Behandlung. Zum Schluss wurde mit dem Fall A < 0 auch ein
Fall beschrieben, der mit der hier verwendeten Simulation nicht ohne weiteres behandelt werden konnte. Um
diesen physikalisch sehr interessanten Fall numerisch zu untersuchten, müsste man versuchen, die Verfahren
so zu modifizieren, dass die Wellenfunktion den simulierten Bereich verlassen kann und an den Rändern
nicht reflektiert wird, d.h. absorbierende anstelle reflektierender Randbedingungen zu verwenden.
Mit den beschriebenen Verfahren können aber auch ohne Modifikation andere interessante Potentiale
untersucht werden. Ein Beispiel dafür ist das Doppelmuldenpotential aus Abbildung 3.1.
Ein weiterer Punkt der noch verbessert werden könnte, ist die Performance des Programms. Hierauf wurde
bei der Programmierung kein besonders großer Wert gelegt. Würde man hier beispielsweise die Berechnung
auf mehrere Prozessorkerne oder auf eine GPU verlagern, könnte sich die Geschwindigkeit problemlos
vervielfachen lassen. Durch Optimierung der Berechnung selbst ließe sich noch mehr Rechenzeit einsparen.
Zusammengefasst konnte ich in dieser Arbeit meine Kenntnisse in Quantenmechanik festigen und vertiefen. Auch mein persönliches Ziel, mehr über numerische Verfahren zu lernen, konnte ich, insbesondere mit
den Runge-Kutta-Verfahren und durch die Stabilitäts- und Genauigkeitsbetrachtung, erreichen.
70
Anhang
A.1 Integration von Gleichung (2.16)
Die Integration in Gleichung (2.16) soll, wie in 2.1.2 kurz beschrieben, ausgeführt werden. Wir nehmen im
folgenden t > tS an und passen das Ergebnis später für t < tS an:
Z t
0
AS
x(t) =
sin(ω0 (t − t0 ))cos(ωS t0 )e−B|t −tS | dt0 =
mω0 −∞
Z tS
0
AS
=
sin(ω0 (t − t0 ))cos(ωS t0 )e−B(tS −t ) dt0 +
mω0 −∞
!
Z t
0
0 −B(t0 −tS ) 0
+
sin(ω0 (t − t )) cos(ωS t )e
dt =
tS
Mit sin x cos y = 12 (sin(x − y) + sin(x + y)) folgt:
AS
=
2mω0
Z
tS
−B(tS −t0 )
Z
tS
0
sin(ω0 t − (ω0 + ωS )t )e
dt +
sin(ω0 t − (ω0 − ωS )t0 )e−B(tS −t ) dt0 +
−∞
−∞
!
Z t
Z t
0 −B(t0 −tS ) 0
0 −B(t0 −tS ) 0
+
dt +
dt
sin(ω0 t − (ω0 + ωS )t )e
sin(ω0 t − (ω0 − ωS )t )e
0
0
tS
(A.1)
tS
Mit sin x = 2i1 (eix − e−ix ) und a := −(ω0 + ωS ), b := ω0 t, c := B und d := −BtS kann man das erste Integral
in Gleichung (A.1) schreiben als:
Z tS
Z tS
0
0
0
1
0
ct0 +d 0
sin(at + b)e
dt =
(ei(at +b) − e−i(at +b) )ect +d dt0 =
2i −∞
−∞
Z tS
0
0
1
=
e(ia+c)t +ib+d − e(−ia+c)t −ib+d dt0 =
2i −∞
"
#t
0
0
1 e(ia+c)t +ib+d e(−ia+c)t −ib+d S
=
−
+C =
2i
ia + c
−ia + c
−∞
Konjugiert komplexes Erweitern und Ausklammern von ect +d liefert:
0
"
#t
0
0
0
ect +d (−ia + c)eiat +ib (ia + c)e−iat −ib S
−
=
=
2i
a2 + c2
a2 + c2
−∞
tS
i(at0 +b)
0
0
0
0
− ce−i(at +b) − iaei(at +b) + iae−i(at +b)
ect +d ce
=
=
2i
a2 + c2
−∞
Mit sin x =
1 ix
2i (e
− e−ix ) und cos x = 12 (eix + e−ix ) folgt:
ect +d (c sin(at0 + b) − a cos(at0 + b))
=
a2 + c2
"
0
#tS
(A.2)
−∞
Setzt man Gleichung (A.2) für das erste Integral und mit entsprechend angepassten Konstanten a und b für
das zweite Integral in Gleichung (A.1) ein, erhält man Folgendes (die zweite, eckige Klammer verhält sich
71
wie die erste, nur mit negiertem c und d und angepassten Integrationsgrenzen):
"
0
0
AS
−B(tS −t0 ) B sin(−(ω0 + ωS )t + ω0 t) + (ω0 + ωS ) cos(−(ω0 + ωS )t + ω0 t)
+
x(t) =
e
2mω0
(ω0 + ωS )2 + B2
#t
B sin(−(ω0 − ωS )t0 + ω0 t) + (ω0 − ωS ) cos(−(ω0 − ωS )t0 + ω0 t) S
+
+
(ω0 − ωS )2 + B2
−∞
"
0
0
−B(t0 −tS ) −B sin(−(ω0 + ωS )t + ω0 t) + (ω0 + ωS ) cos(−(ω0 + ωS )t + ω0 t)
+
+e
(ω0 + ωS )2 + B2
#t
−B sin(−(ω0 − ωS )t0 + ω0 t) + (ω0 − ωS ) cos(−(ω0 − ωS )t0 + ω0 t)
+
(ω0 − ωS )2 + B2
tS
(A.3)
Einsetzen der Integrationsgrenzen und weiteres Vereinfachen ergibt für t > tS :
x(t) =
C1 =
D1 =
AS D1 sin(ω0 t) + D2 cos(ω0 t) + e−B(t−tS ) C1 sin(ωS t) + C2 cos(ωS t)
2mω0
mit
B
B
−
(ω0 + ωS )2 + B2 (ω0 − ωS )2 + B2
2B cos((ω0 + ωS )tS ) 2B cos((ω0 − ωS )tS )
+
(ω0 + ωS )2 + B2
(ω0 − ωS )2 + B2
C2 =
D2 = −
ω0 + ωS
ω0 − ωS
+
(ω0 + ωS )2 + B2 (ω0 − ωS )2 + B2
2B sin((ω0 + ωS )tS ) 2B sin((ω0 − ωS )tS )
−
(ω0 + ωS )2 + B2
(ω0 − ωS )2 + B2
(A.4)
Das Ergebnis für t < tS erhält man, wie oben beschrieben, durch Anpassen der Integrationsgrenzen und
Streichen der zweiten, eckigen Klammer in Gleichung (A.3):
x(t) =
72
AS e−B(t0 −t) − C1 sin(ωS t) + C2 cos(ωS t)
2mω0
(A.5)
A.2 Herleitung der Relation (2.57)
Bei den quantenmechanischen Berechnungen taucht häufig ein Ausdruck der Form (2.57) auf:
exp X̂ Ŷ exp −X̂
(A.6)
Diesen möchte man gerne ohne Operatoren im Exponenten schreiben. Man erweitert dazu die Exponenten
um einen Parameter λ und verwendet die Ableitung nach diesem Parameter. Mit der Bedingung [X̂,Ŷ] = µŶ
erhält man folgendes:
Â(λ) = exp λX̂ Ŷ exp −λX̂
d Â(λ)
= X̂ exp λX̂ Ŷ exp −λX̂ + exp λX̂ Ŷ −X̂ exp −λX̂ =
dλ
h
i
= exp λX̂ X̂,Ŷ exp −λX̂ = µ exp λX̂ Ŷ exp −λX̂ =
= µÂ(λ)
(A.7)
Dies ist eine Differentialgleichung für den Operator Â(λ), die durch
Â(λ) = eµλ Ŷ
(A.8)
gelöst wird. Somit ist dieser Ausdruck gleichwertig zum ursprünglichen Ausdruck für Â(λ). Man setzt λ = 1
und erhält:
exp X̂ Ŷ exp −X̂ = eµ Ŷ
(A.9)
Somit wurden die Operatoren in den Exponenten in (A.6) durch einen Faktor eµ ersetzt.
73
A.3 Berechnung der Matrixdarstellung von x̂4
Um die Matrixdarstellung von x̂4 in der Eigenbasis des harmonischen Oszillators zu erhalten wird x̂ mit
bekannter Matrixdarstellung (2.44) zwei mal quadriert:
s
s
√
~ ~ √
x̂mn =
âmn + â†mn =
nδm,n−1 + n + 1δm,n+1
2mω0
2mω0
∞ √
X
√
√
√
~
2
⇒ x̂mn
=
kδm,k−1 + k + 1δm,k+1
nδk,n−1 + n + 1δk,n+1 =
2mω0 k=0
∞
√
√
√
~ X√
m + 1δm+1,k + mδm−1,k
nδk,n−1 + n + 1δk,n+1 =
2mω0 k=0
p
p
p
√
(m + 1)nδm+1,n−1 + (m + 1)(n + 1)δm+1,n+1 + mnδm−1,n−1 + m(n + 1)δm−1,n+1
=
=
~
2mω0
p
p
√
~ p
=
(m + 1)(m + 2)δm,n−2 + (m + 1)(m + 1)δmn + mmδmn + m(m − 1)δm,n+2 =
2mω0
p
~ p
=
(m + 1)(m + 2)δm,n−2 + (2m + 1)δmn + m(m − 1)δm,n+2
(A.10)
2mω0
Damit sieht x̂2 folgendermaßen aus:
1
√0
~ 2·1
x̂2 =
2mω0
0
3
0
√
3·2
√
1·2
0
5
0
√
4·3
√
2·3
0
7
0
...
√
3·4
0
9
. . .
. . .
(A.11)
Das zweite mal Quadrieren ergibt:
~
x̂ =
2mω0
4
!2 X
∞ p
p
(m + 1)(m + 2)δm,k−2 + (2m + 1)δmk + m(m − 1)δm,k+2 ·
k=0
·
~
=
2mω0
!2 X
∞ p
p
(k + 1)(k + 2)δk,n−2 + (2k + 1)δkn +
(m + 1)(m + 2)δm+2,k + (2m + 1)δmk +
p
p
k(k − 1)δk,n+2 =
m(m − 1)δm−2,k ·
(A.12)
k=0
·
p
(n − 1)nδk,n−2 + (2n + 1)δkn +
p
(n + 2)(n + 1)δk,n+2 =
!2 X
∞ p
~
=
(m + 1)(m + 2)(n − 1)nδm+2,n−2 +
2mω0 k=0
p
p
+ (m + 1)(m + 2)(2n + 1)δm+2,n + (m + 1)(m + 2)(n + 2)(n + 1)δm+2,n+2 +
p
+ (2m + 1) (n − 1)nδm,n−2 + (2m + 1)(2n + 1)δmn +
p
p
+ (2m + 1) (n + 2)(n + 1)δm,n+2 + m(m − 1)(n − 1)nδm−2,n−2 +
p
p
+ m(m − 1)(2n + 1)δm−2,n + m(m − 1)(n + 2)(n + 1)δm−2,n+2 =
74
!2 X
∞ p
~
=
(m + 1)(m + 2)(m + 3)(m + 4)δm,n−4 +
2mω0 k=0
p
p
+ (m + 1)(m + 2)(2m + 5)δm,n−2 + (m + 1)(m + 2)(m + 2)(m + 1)δmn +
p
+ (2m + 1) (m + 1)(m + 2)δm,n−2 + (2m + 1)(2m + 1)δmn +
p
p
+ (2m + 1) m(m − 1)δm,n+2 + m(m − 1)(m − 1)mδmn +
p
p
+ m(m − 1)(2m − 3)δm,n+2 + m(m − 1)(m − 2)(m − 3)δm,n+4 =
~
=
2mω0
!2 X
∞ p
(m + 1)(m + 2)(m + 3)(m + 4)δm,n−4 +
k=0
p
+ (4m + 6) (m + 1)(m + 2)δm,n−2 + (m(6m + 6) + 3) δmn +
p
p
+(4m − 2) m(m − 1)δm,n+2 + m(m − 1)(m − 2)(m − 3)δm,n+4
(A.13)
Als Matrix geschrieben sieht x̂4 damit folgendermaßen aus:
α(0)
0
!2 β(0)
0
~
x̂4 =
2mω0 γ(0)
β(0)
0
α(1)
0
β(1)
0
γ(1)
0
α(2)
0
β(2)
0
β(1)
0
α(3)
0
β(3)
0
0
β(2)
0
α(4)
0
β(4)
γ(1)
0
β(3)
0
α(5)
0
0
β(4)
0
α(6)
0
γ(2)
...
γ(0)
...
γ(2)
α(m) := m(6m + 6) + 3
p
mit β(m) := (4m + 6) (m + 1)(m + 2)
p
γ(m) := (m + 1)(m + 2)(m + 3)(m + 4)
. . .
. . .
. . .
(A.14)
75
Literatur
[Dah63]
G. Dahlquist. “A special stability problem for linear multistep methods”. In: BIT Numerical
Mathematics 3 (1 1963), S. 27–43.
[Fli08]
T. Fließbach. Quantenmechanik: Lehrbuch zur Theoretischen Physik III. 5. Aufl. Fließbach,
Torsten: Lehrbuch zur theoretischen Physik. Spektrum Akademischer Verlag, Sep. 2008. isbn:
9783827420206.
[For88]
B. Fornberg. “Generation of Finite Difference Formulas on Arbitrarily Spaced Grids”. In: Mathematics of Computation 51.184 (Okt. 1988), S. 699–706. url: http://amath.colorado.
edu/faculty/fornberg/Docs/MathComp_88_FD_formulas.pdf.
[Hah11]
T. Hahn. Routines for the diagonalization of complex matrices. Aug. 2011. url: http://www.
feynarts.de/diag.
[HNW08]
E. Hairer, S. P. Nørsett und G. Wanner. Solving Ordinary Differential Equations I: Nonstiff Problems. 2. Aufl. Solving Ordinary Differential Equations. Springer, Apr. 2008. isbn: 9783540788621.
[HW09]
J. Heisig und J. Wess. Theoretische Mechanik. 2. Aufl. Springer-Lehrbuch. Springer, 2009. isbn:
9783540885740.
[Mab07]
H. Mabuchi. The Forced Harmonic Oscillator, Decoherence, and Schrödinger Cat States. 2007.
url: http://www.its.caltech.edu/~hmabuchi/Ph125c/fho.pdf.
[Wei04]
Prof. Dr. G. Weiß. Quantenmechanische Behandlung, Landauniveaus. Feb. 2004. url: http:
//uni-ka.the-jens.de/html/exphys5/exse45.htm.
[Wik14]
Wikipedia. Harmonischer Oszillator (Quantenmechanik). März 2014. url: https : / / de .
wikipedia.org/wiki/Harmonischer_Oszillator_(Quantenmechanik).
[Wul03]
Dr. U. Wulf. Einsteinmodell für die Gitterschwingungen eines Festkörpers. Juli 2003. url:
https://www.physik.tu-cottbus.de/users/gregor/thermo03/haupt/node93.
76