TET1 - Helmut-Schmidt
Werbung

Kurzskript zur Vorlesung
Theoretische Elektrotechnik I
Helmut Schmidt Universität
Universität der Bundeswehr Hamburg
Wintertrimester 2013
Prof. Dr. Marcus Stiemer
Stand: 22. März 2013
0
Ziele und Methodik der
Theoretischen Elektrotechnik
Der Entwurf elektrotechnischer Geräte und Bauteile erfordert oftmals nicht nur ein
qualitatives Verständnis der vorherrschenden physikalischen Gesetzmäßigkeiten, sondern hängt oft auch davon ab, dass quantitative Aussagen über die zu entwicklenden
Komponenten in hinreichender Genauigkeit prognostiziert“ werden können. Gegen”
stand der Vorlesung Theoretischen Elektrotechnik“ ist die klassische elektromagne”
tische Feldtheorie. Diese Theorie erlaubt für viele in der Elektrotechnik auftretende
Situationen eine im Rahmen Meßgenauigkeit exakte Modellierung. Sie verliert erst bei
im Sinne der Einsteinschen Relativitätstheorie sehr stark beschleunigten Ladungen ihre
Gültigkeit oder in Situationen, in denen einzelne Photonen“ einen im Vergleich zur
”
Teilchenzahl hohen Impuls besitzen (Beispiel: Photoelektrischer Effekt, bei dem einzelne Photonen die Bindung von Valenzelektronen aufheben).
Wie heute bekannt ist, können die Grundgleichungen der elektromagnetischen Feldtheorie, die sogenannten Maxwell-Gleichungen, aus anderen physikalischen Prinzipien
(Coulombgesetz, Lorentz-Kraft, Erhaltung der Ladung und Invarianz physikalischer
Gesetze bei Wechsel des Inertialsystems) abgeleitet werden. Historisch gesehen, sind
sie jedoch zuvor empirisch gefunden worden. Ihr Zusammenhang zu anderen physikalischen Modellen wurde erst später systematisch nachvollzogen. Beispielsweise wurde
das Elektron erst eine Generation nach Aufstellung der Maxwellgleichungen entdeckt.
Die Maxwellgleichungen ergeben zusammen mit zusätzlichen Materialgleichungen und
Modellen für die jeweils herrschenden Randbedingungen ein vollständiges Modell, mit
dem technisch relevante elektromagnetische Phänomene modelliert werden können. Die
abgeleiteten Gleichungen können anschließend in Spezialfällen analytisch oder numerisch gelöst werden. Auf diese Weise werden qualitative und quantitative Analysen
neuer technischer Produkte möglich.
Oftmals erlauben die Rahmenbedingungen technischer Prozesse eine Vereinfachung des
elektromagnetischen Feldmodells - beispielsweise wenn sich Felder nur langsam“ oder
”
gar nicht zeitlich ändern. Da die Lösung der Maxwell-Gleichungen dann einfacher wird,
ist es üblich mit vereinfachten Modellen zu arbeiten. Man spricht entsprechend von
Elektrostatik, Magnetostatik, Elektroquasistatik und Magnetoquasistatik. Diese Ein-
2
teilung legt auch die Gliederung dieses Kurzskriptes fest.
In diesem einleitenden Kapitel wird ein kurzer Überblick über die Maxwellgleichungen
gegeben. Dabei erfolgt weder eine strenge physikalische Ableitung noch eine historisch
motivierte Darstellung.
0.1 Konzeptionelle Vorüberlegungen
In der modernen Physik wird die Wechselwirkung der Materie mit sich selbst auf vier
fundamentale Kräfte zurückgeführt:
• die starke Kernkraft,
• die schwache Kernkraft,
• die elektromagnetische Kraft und
• die Gravitationskraft.
Jede dieser Wechselwirkungen kann man sich mit einer besonderen Eigenschaft der
Materie verbunden vorstellen. Dabei ist elektrische Ladung die Eigenschaft, die mit
der elektromagnetischen Kraft verbunden ist.
Beispiel 1. Befinden sich an den Orten ~r1 und ~r2 ruhende Teilchen mit Ladungen
Q1 und Q2 , so wirkt die Kraft
Q1 Q2
1
~r2 − ~r1
F~ =
2
4πε0 |~r2 − ~r1 | |~r2 − ~r1 |
auf das zweite Teilchen. Hierbei ist ε0 = 8.854... · 10−12 As/Vm die elektrische
Feldkonstante. Gemäß dem Prinzip Actio = Reactio“ wirkt die Kraft −F~ auf
”
das erste Teilchen.
2. Befinden sich an den Orten ~r und ~ri , i = 1, . . . , N , ruhende Teilchen mit Ladungen
Q und Qi , so wirkt die Kraft
F~ = Q
N
X
Qi
1
~r − ~ri
~
= QE
2
4πε
|~
r
−
~
r
|
|~
r
−
~
r
|
0
i
i
i=1
mit
~ = E(~
~ r) =
E
N
X
Qi
1
~r − ~ri
4πε0 |~r − ~ri |2 |~r − ~ri |
i=1
~ heißt elektrische Feldstärke.
auf das erste Teilchen. Das hier eingeführte Vektorfeld E
Das durch die vorliegende Ladungsverteilung an den Orten ~ri erzeugte elektrische
Feld kann durch Superposition der Felder
~r − ~ri
1
~ i (~r) = Qi
E
2
4πε0 |~r − ~ri | |~r − ~ri |
3
der einzelnen Punktladungen bestimmt werden.
Das vorhergehende Beispiel zeigt bereits zwei wichtige Prinzipien der elektromagnetischen Feldtheorie:
~ und auf die
• Eine Kraftwirkung wird auf das Vorhandensein eines Vektorfeldes E
Ladung Q des Probeteilchens“ zurückgeführt.
”
• Die Kraftwirkung wird gedanklich als Resultat einer Eigenschaft des Probeteilchens (Ladung) und einer räumlich verteilten Größe, dem elektrischen Feld, aufgefasst.
• Feldwirkung (Kraft) und Felderzeugung werden gedanklich getrennt, obwohl die
ursprüngliche Form der Coulomb-Kraft symmetrisch ist.
• Bei Felderzeugung gilt das Superpositions-Prinzip.
Neben dem vom Bewegungszustand unabhängigen Anteil tritt auch eine Kraftwirkung
auf, die von bewegten Lagungsträgern (Strömen) erzeugt wird und vom Bewegungszstand des Probeteilchens abhängig ist. Diese Kraft wird Lorentz-Kraft genannt. Auch
hier wird die Kraftwirkung in Zusammanhang mit einem Feld gesetzt. So wird Ladung
als Spezifikum des Probeteilchens von einer räumlich verteilten Eigenschaft, nämlich
~ gedanklich getrennt. Ebenfalls in Analogie zum Voreiner magnetischen Flussdichte B,
~ zwar ebenfalls durch bewegte Ladungen (Ströme) hervorgerufen,
hergehenden wird B
aber der Zusammenhang von Strom und magnetischem Feld wird von der Kraftwir~ und B
~ in einem
kung des Feldes zunächst getrennt betrachtet. Die Größe der Felder E
gegebenen Inertialsystem kann mit Hilfe ruhender und bewegter Ladungen Q aus der
folgenden Beziehung ermittelt werden:
Bemerkung
~ und B
~ (in einem Inertialsystem) gegeben, so gilt für die Kraft auf eine Ladung
Sind E
Q mit Geschwindigkeit ~r˙ am Ort ~r
~ r) + ~r˙ × B(~
~ r)) .
F~ = Q(E(~
Der geschwindigkeitsabhängige Teil heißt Lorentz-Kraft.
Bemerkung
~ r), B(~
~ r), F~ und ~r˙ gilt nur, wenn alle
Dieser Zusammenhang zwischen den Werten E(~
Größen im gleichen Inertialsystem ermittelt werden. Bei der Analyse technischer Systeme sind aber oft elektrische und magnetische Felder relevant, die in unterschiedlichen
Koordinatensystemen gemessen werden (z.B. bei Elektromotoren oder Generatoren).
4
0.2 Die Maxwell-Gleichungen
Die oben geschilderte Kraftwirkung auf bewegte und ruhende Ladungen ist (aus phänomenologischer bzw. historischer Sicht) nur eine Seite der Wechselwirkung elektromagnetischer Felder mit der Materie. Auf der anderen Seite wird beobachtet, dass
elektrische Felder durch (ruhende) Ladungen und magnetische Felder durch bewegte
Ladungen (Ströme) erzeugt werden. Zur Modellierung dieser Wechselwirkung werden
zwei Quellfelder, die skalare Raumladungsdichte % und die vektorielle Stromdichte J~
eingeführt, sowie die sogenannte dielektrische Verschiebung oder elektrische Flussdichte
~ und die magnetische Feldstärke H.
~
D
0.2.1 Die Quellgrößen
Ladung Jedem (glatten) Teilvolumen V des Raumes kann die enthaltene Ladungsmenge Q(V ) zugeordnet werden. Aus der modernen Physik ist bekannt, dass die Ladung
gequantelt“ ist. Die elementare Ladungsgröße ist aber so gering, dass es in makrosko”
pischen Anwendungen in der Regel ausreicht, Q als kontinuierlich verteilte Größe zu
betrachten.
Definition 0.1
Die Raumladungsdichte %(~r) am Ort ~r ist definiert durch
%(~r, t) = lim
V →0
dQ
,
dV
wobei V Volumina mit ~r ∈ V und Q = Q(V ) die jeweils eingeschlossene Ladungsmenge
ist.
Bemerkung
Es gilt
Q(V ) =
y
%(~r) dV .
V
Strom Jeder (glatten) Fläche A im Raum kann der zugehörige Ladungsfluss pro
”
Zeit“ oder Strom I(A) zugeordnet werden:
Definition 0.2
Ist A eine Fläche im Raum und ∆Q die in der Zeitspanne ∆t in Richtung der Flächennormalen
durch A tretende Ladung, so ist die Stromstärke I(A) durch A definiert durch
∆Q
dQ
=
.
∆t→0 ∆t
dt
I(A) = lim
Um eine Größe zu erhalten, aus der für jede beliebige Fläche der Strom berechnet
werden kann, wird die Stromdichte eingeführt.
5
Definition 0.3
Gegeben sei ein System von drei linear unabhängigen Einheitsvektoren (~n1 , ~n2 , ~n3 ). Die
~ r) am Ort ~r ist definiert durch
Stromdichte J(~
~ r) = lim I(Ak ) = dIk ,
~nk · J(~
Ak →0 Ak
dAk
wobei Ak (k=1,2,3) jeweils Flächen mit ~r ∈ Ak und Flächennormale ~nk im Punkt ~rk
sind. Ferner ist Ik = I(Ak ) der jeweils durch Ak fließende Strom ist.
Bemerkung
Es gilt
I(A) =
x
A
~ r) · dA
~.
J(~
Da Ladung eine strenge Erhaltungsgröße ist, gilt für (glatte) Volumina die Kontinuitätsgleichung:
{
~ r ) · dA
~ = − dQ .
J(~
dt
∂V
0.2.2 Felderzeugung
Dielektrische Verschiebung Ein elektrisches Feld verschiebt frei bewegliche Ladungen. Dieses Phänomen ist als Influenz bekannt. Diese physikalische Eigenschaft kann
zur Definition der elektrischen Flussdichte oder dielektrischen Verschiebung eines elektrischen Feldes genutzt werden:
Definition 0.4
Gegeben sei ein System von drei linear unabhängigen Einheitsvektoren (~n1 , ~n2 , ~n3 ). Weiter sei Q(Ak ) die Ladungsmenge die durch Influenz auf dünnen, ideal leitenden Folien
Ak mit Flächennormalen nk (k=1,2,3) an der Stelle ~r entsteht. Die elektrische Fluss~ r) am Ort ~r ist definiert durch
dichte oder dielektrische Verschiebung D(~
~ r) = lim Q(Ak ) = dQk .
~nk · D(~
Ak →0
Ak
dAk
Aus dieser Definition folgt
{
A=∂V
~ r ) · dA
~ = Q(V ) .
D(~
Magnetische Feldstärke
Definition 0.5
Gegeben sei ein System von drei linear unabhängigen Einheitsvektoren (~t1 , ~t2 , ~t3 ). Die
Kurven Ck , k = 1, 2, 3, haben im Punkt ~r jeweils die Tangenteneinheitsvektoren ~tk .
6
Ihre Bogenlänge betrage s für k = 1, 2, 3. Weiter sei I(Ck ) der Strom, der in einer
schlanken, um die Kurven Ck ideal gewickelten Spule mit N Windungen entsteht. Die
zugehörige magnetische Durchflutung werde Θk = N I(Ck ) bezeichnet. Die magnetische
~ r) am Ort ~r ist definiert durch
Feldstärke H(~
~ r) = − lim Θ(Ck ) = − dΘk .
~tk · H(~
s→0
s
ds
0.2.3 Drei Formen der Maxwell-Gleichungen
Bisher wurden die folgenden Feldgrößen definiert: Siehe Tabelle.
Nun geht es darum, Bestimmungsgleichungen für diese 5 Skalarfelder und ein Vektorfeld zu ermitteln. Bei den Maxwell-Gleichungen handelt es sich um 2 skalare und
~ div B,
~ rot E
~ und div D.
~ Wenn zusätzliche Glei2 vektorielle Gleichungen für rot H,
~ = E(
~ D)
~ uns B
~ = B(
~ H)
~ aufgestellt werden können (sogenannte
chungen der Form E
~ und B
~
Materialgleichungen), sind dadurch alle Quellen und alle Wirbel der Felder E
für alle Zeiten bechrieben. Zusammen mit geeigneten Randbedingungen und Anfangs~ und B
~ festgelegt. Dies folgt
bedingungen sind durch diese Information die Felder E
aus einem Satz von Helmholtz.
Anstelle der oben genannten Feld-Größen kann auch
˛
x
~ r) · dA
~=
rot H(~
A
x
A
y
V
~ r) · d~r
H(~
˛
C=∂A
~ r) · dA
~=
rot E(~
~ r) · d~r
E(~
C=∂A
~ r) dV =
div B(~
y
V
{
A=∂V
~ dV =
div D
{
D=∂V
~ r) · dA
~
B(~
~ r) · dA
~
D(~
für jede (glatte) Fläche A bzw. jedes (glatte) Volumen V bestimmt werden. Daher
könne die Maxwellgleichungen auch über diese sogenannten integralen Größen definiert
werden. Dies bietet den zusätzlichen Vorteil einer erweiterten Gültigkeit: Die integralen
Größen sind auch zur Modellierung von Situationen geeignet, in denen die differenziellen Ausdrücke Divergenz und Rotation nicht gebildet werden können, da Komponenten
der Felder springen. Dies ist beispielsweise an den Grenzflächen zwischen verschiedenen
Materialien der Fall. Mit dieser Motivation definieren wir:
Definition 0.6
7
Für jede (glatte) Fläche A bzw. jedes (glatte) Kurve C definieren wir
ˆ
~ r) · d~r
Vm (C) :=
H(~
ˆ
C=∂A
~ r) · d~r
E(~
U (C) :=
C=∂A
Φ(A) :=
x
Ψ(A) :=
A
x
A
~ r) · dA
~
B(~
~ r ) · dA
~.
D(~
Hierbei heißt
• Vm (C) magnetische Spannung längs C,
• U (C) elektrische Spannung längs C,
• Φ(A) magnetischer Fluss durch A,
• Ψ(A) elektrischer Fluss durch A.
Bemerkung
Die folgende Tabelle gibt nochmal eine Übersicht über die integralen Größen zusammen
mit deren Einheiten: Bisher wurden die folgenden Feldgrößen definiert:
Formelzeichen
%(~r, t)
~ r, t)
J(~
~ r, t)
E(~
~ r, t)
B(~
~ r, t)
D(~
~ r, t)
H(~
Bezeichnung
Elektrische Raumladungsdichte
Elektrische Stromdichte
Elektrische Feldstärke
Magnetische Flussdichte
Elektrische Flussdichte
Magnetische Feldstärke
SI-Einheit
C/m3 - A · s/m3
A/ m2
V/m
Wb/m2 - V · s/m2
C/m2 - A · s/m2
A/m
Bezogen auf die globalen Feldgrößen müssen die Feldgleichungen das folgende Leisten:
Bemerkung
Ein elektromagnetisches Feldproblem zu lösen heißt, zu jedem Zeitpunkt t für jede
Kurve C elekrische und magnetische Spannung und für jede Fläche A elektrischen und
magnetischen Fluss bestimmen zu können.
Wir werden nun die Maxwell-Gleichungen in drei Versionen vorstellen:
1. Die globale Version ordnet jeder Kurve eine elekrische und magnetische Spannung und jeder Fläche einen elektrischen und magnetischen Fluss zu. Sie gilt
8
uneingeschränkt in dem Sinne, dass auch bei Vorhanden sein bewegter Komponenten richtig bleibt und auch über die Grenzen unterschiedlicher Materialien
hinweg gilt. Sie kann Punktladunge und Linienströme berücksichtigen.
2. In der Integralform wird die Definition von Flüssen und Spannungen explizit
angegeben und mit den Integralen über Raumladungsdichte und Stromdichte in
Verbindung gesetzt. Im Vergleich zur globalen Version ändert sich lediglich, dass
Punktladungen und Linienströme nun gesondert betrachtet werden müssen.
3. Die differentielle Form entsteht, indem auf die Fluss- und Spannungsintegrale
der Gaußsche bzw. Stokessche Integralsatz angewendet wird und dann die Integranden von jeweils rechter und linker Seite verglichen werden. Die differentielle
Form der Maxwell-Gleichunge gilt immer dort, wo die Integralsätze anwendbar
sind. Dies ist nicht über Grenzflächen zwischen unterschiedlichen Materialien hinweg der Fall. Hier sind zusätzliche Bedingungen erforderlich. Ausserdem gelten
die differentiellen Maxwellgleichungen nur innerhalb eines Inertialsystems.
Die folgende Tabelle listet die vier Maxwellgleichunge in jeder der drei zuvor genannten
Formen auf:
9
10
Maxwellsche Gleichung
Globale Form
Amperesches
Vm (∂A) = I(A) +
d
Ψ(A)
dt
Integrale Form
˛
x
x
~+ d
~ · d~r =
~ · dA
~
J~ · dA
H
D
dt
A
∂A
Durchflutungsgesetz
Faradaysches
d
U (∂A) = − Φ(A)
dt
˛
A
~ · d~r = − d
E
dt
{
∂A
Induktionsgesetz
Satz vom magnetischen Φ(∂V ) = 0
{
∂V
Hüllenfluss
Satz vom elektrischen
Ψ(∂V ) = Q(V )
{
∂V
Hüllenfluss
A
~ · dA
~
B
~ · dA
~=0
B
~ · dA
~=
D
Differentielle Form
~
~ = J~ + ∂ D
rot H
∂t
~
~ = − ∂B
rot E
∂t
~ =0
div B
y
V
%dV
~ =%
div D
0.3 Materialgleichungen
Bei den Maxwell-Gleichungen handelt es sich um 2 skalare und 2 vektorielle Glei~ div B,
~ rot E
~ und div D.
~ Da durch Anwendung des Divergenzopechungen für rot H,
rators auf beide Seiten des Induktionsgesetzes die zeitliche Konstanz der Divergenz
der magnetischen Flussdichte folgt, bietet der Satz vom magnetischen Hüllenfluss keine zusätzliche Gleichung, sondern hat nur die Rolle einer Anfangsbedingung. Somit
bieten die Maxwell-Gleichungen 7 skalare Gleichungen. Zusätzlich sind Stromdichte J~
und Raumladungsdichte % in vielen Fällen nicht explizit bekannt. Zur Bestimmung der
vorhandenen 16 skalaren Freiheitsgrade fehlen also neun weitere skalare Gleichungen.
Dies entspricht drei vektoriellen Gleichungen, den sogenannten Materialgleichungen.
Typisch sind hierbei funktionale Beziehungen der Art
~ = E(
~ D)
~ ,
E
~ = B(
~ H)
~
B
und speziell in Leitern
~ E)
~ .
J~ = J(
Zunächst formulieren wir die Materialgleichungen für das Vakuum. Anschließend gehen
wir nur kurz auf die allgemeine Situation ein und behandeln dann den einfachsten Fall
linearen, isotropen, instantane Materialverhaltens, dem aber auch die größte technische
Bedeutung zukommt.
0.3.1 Vakuum
Im Vakuum gelten die linearen Beziehungen
~ = ε0 E
~,
D
~ = µ0 H
~.
B
Hierbei ist ε0 = 8.854... · 10−12 As/Vm die elektrische Feldkonstante und µ0 = 4π · 10−7
Vs/Am die Permeabilität des Vakuums. Die Stromdichte J~ ist hier Null.
0.3.2 Wechselwirkung mit Materie
Materie, die nach außen elektrisch nicht geladen ist, weist in der Regel auf molekularer
Ebene eine Ladungs-Struktur auf. Ein elektrisches Feld bewirkt nun eine Polarisierung
der Materie, d.h., die Moleküle richten sich im Feld aus. Das zugehörige dielektrische
~ und einem zusätzlichen Polarisationsfeld P~
Verschiebungsfeld setzt sich daher aus ε0 E
zusammen, d.h., es gilt
~ = ε0 E
~ + P~ .
D
Analog gibt es Stoffe, die auf ein magnetisches Feld durch Magnetisierung reagieren.
Dabei induziert das magnetische Feld Kreisströme auf atomarer Ebene, die entspre~ entsprechen. Somit gilt
chend dem Durchflutungssatz einem Magnetisierungsfeld M
~ = µ0 ( H
~ +M
~ ).
B
11
~ und E
~ bzw. zwiIm allgemeinen können sehr komplexe Zusammenhänge zwischen D
~ und H
~ bestehen. Wie gesagt, werden wir lediglich den technisch wichtigen Fall
schen B
linearen Materialverhaltens studieren.
0.3.3 Lineares Materialverhalten
Wir betrachten hier nur sogenannte instantane Materialien, bei denen das Polariasati~ sich ohne zeitliche Verzögerung aufbauen.
onsfeld P~ bzw. das Magnetisierungsfeld M
Definition 0.7
Ein Material heißt elektrisch linear und isotrop, wenn es ein Skalarfeld ε gibt, so dass
~ r) = ε(~r)E(~
~ r)
D(~
in allen Punkten ~r, an denen dieses Material vorliegt. In diesem Fall heißt ε Permittivität des Materials. Der Quotient
εr =
ε
ε0
heißt relative Permittivität des Materials. Die Zahl
χ e = εr − 1
heißt elektrische Suszeptibilität des Materials. Es gilt
~.
P~ = ε0 χr E
Bemerkung
~ D
~ und P~ stets in
Beim elektrisch linearen isotropen Material weisen die Vektoren E,
eine Richtung.
Definition 0.8
Ein Material heißt magnetisch linear und isotrop, wenn es ein Skalarfeld µ gibt, so dass
~ r) = µ(~r)H(~
~ r)
B(~
in allen Punkten ~r, an denen dieses Material vorliegt. In diesem Fall heißt µ Permeabilität des Materials. Der Quotient
µr =
µ
µ0
heißt relative Permeabilität des Materials. Die Zahl
χm = µr − 1
heißt magnetische Suszeptibilität des Materials. Es gilt
~ = χm H
~.
M
12
Bemerkung
~ B
~ und M
~ stets
Beim magnetisch linearen isotropen Material weisen die Vektoren H,
in eine Richtung.
0.3.4 Elektrische Leiter
In elektrischen Leitern sind frei bewegliche Ladungen vorhanden. Ein vorhandenes
~ bewirkt dann eine Stromdichte J~ = J(
~ E).
~ Wir gehen wieder von
elektrisches Feld E
einem linearen isotropen Material aus:
Definition 0.9
In einem elektrischen Leiter gilt dass Ohmsche Gesetz, wenn es ein Skalarfeld κ gibt,
so dass
~ r, t) = κ(~r)E(~
~ r, t)
J(~
gilt. Das Skalarfeld κ heißt elektrische Leitfähigkeit.
Wir wollen unser Modell um Ströme erweitern, deren Entstehung wir nicht in unserem Modell beschreiben wollen. Dies ist z.B. dann Fall, wenn wir ein neues bateriebetriebenes Bauteil modellieren. Dann wollen wir im Normalfall die elektrochemische
Energiewandlung in der Batterie nicht in unserem Modell abbilden. Uns reicht die Information, dass die Baterie eine konstante Spannung liefert. In diesem Fall könnte man
~ 0 (~r, t) vorgeben, deren Wert unahängig von
eine eingeprägte elektrische Feldstärke E
allen anderen Feldern des Modells ist. Dies führt auf eine gesamte Stromdichte der
Form
~ r, t) = κ(~r) E(~
~ r, t) + E
~ 0 (~r, t)
J(~
In anderen Fällen ist bekant, dass eine nicht im Modell zu berücksichtigende Kompontente einen definierten Strom liefert. Diesen würde man über eine eingeprägte Stromdichte J~0 modeliieren. Es folgt
~ r, t) = κ(~r)E(~
~ r, t) + J~0 (~r, t) .
J(~
0.4 Randbedingungen
Während die globale Form der Maxwellgleichungen auch über Grenzflächen zwischen
unterschiedlichen Materialien mit unterschiedlicher Permittivität und unterschiedlicher
Permeablität hinweg gilt, verliert die differentielle Form auf den Grenzflächen ihre
~ H,
~ D
~ und B
~ nicht mehr differenzierbar, und die
Gültigkeit. Dort sind die Felder E,
Anwendung der Integralsätze, die zur Ableitung der Maxwellgleichungen in differentieller Form aus der Integralform notwendig ist, kann nicht erfolgen. Statt dessen folgen
13
aus der globalen Form der Maxwell-Gleichungen die im folgenden Satz 0.12 angegebenen Grenzbedingungen an den Grenzflächen von Gebiete mit einheitlichem (homogenen) Material. Zusätzlich wollen wir das Modell dadurch erweitern, dass wir an den
Grenzflächen Flächenladungen und Flächenströme zulassen. Über Flächenströme ist es
beispielsweise möglich, den in einen idealen Leiter eingeprägten Strom als Randbedingung für die Feldberechnung im Äußeren des Leiters zu modellieren. Bevor Satz 0.12
formuliert wird, definieren wir zunächst Flächenladungen (Ladungsbedeckungen) und
Flächenströme (Strombeläge) formal:
Definition 0.10
Gegeben sei eine Fläche A und ~r ∈ A. Weiter seien A0 Teilflächen von A mit ~r ∈ A0 , die
jeweils die Gesamtladung Q(A0 ) tragen. Dann ist die Ladungsbedeckung von A definiert
durch
dQ
Q(A0 )
=
.
σ(~r) = lim
0
0
A →0
A
dA0
Bemerkung
Es gilt
Q(A) =
x
σ(~r)dA .
A
Im Falle einer im Raum gegebenen Stromdichte J~ wird als zugehörige globale Größe ein
Strom I(A) jeder Fläche A zugeordnet. Entsprechend wird bei einer auf einer Fläche
gegebenen Stromdichte jeder Kurve C in dieser Fläche ein Strom I(C) zugeordnet. Aus
dem Strom durch zwei Kurven C1 und C2 in dieser Fläche A, deren Tangentenvektoren im Punkt ~r linear unabhängig sind, kann somit die Flächenstromdichte oder der
Strombelag definiert werden.
Definition 0.11
Gegeben sei eine Fläche A und ~r ∈ A. Weiter seien Ck , k = 1, 2, Kurven der Länge
s in A mit ~r ∈ Ck und linear unabhängigen Tangentenvektoren ~t1 , ~t2 in ~r, durch die
jeweils ein Gesamtstrom Ik = I(Ck ) fließt. Dann ist der Strombelag von A definiert
durch
I(Ck )
dIk
~tk · α
~ (~r) = lim
=
.
s→0
s
ds
Bemerkung
Es gilt
ˆ
(~n × α
~ ) · d~r ,
I(C) =
C
wobei ~n der Normalenvektor an A im Punkt ~r ist.
Nun können die Randbedingungen unter Berücksichtigung von Ladungsbelegungen und
Strombelägen auf Grenzflächen definiert werden.
14
Satz 0.12
Es gilt
~2 − H
~ 1) = α
~n × (H
~,
~2 − E
~ 1) = 0 ,
~n × (E
~2 − B
~ 1) = 0 ,
~n · (B
~2 − D
~ 1) = σ .
~n · (D
Hierbei ist ~n ein Einheits-Normalenvektor der Grenzfläche zwischen dem Bereich, in
dem die mit 1 indizierten Feldgrößen gelten und dem Bereich, in dem die mit 2 indizierten Feldgrößen gelten. Der Normalenvektor ist so orientiert, dass er in das mit 2
indizierte Gebiet weist.
~
Aus den Grenzbedingungen folgt ein Brechungsgesetz für elektrische (E-Feldlinien)
und
~
magnetische (B-Feldlinien)
beim Übergang von einem Gebiet mit Permittivität ε1 in ein
Gebiet mit Permittivität ε2 bzw, mit Permeabilität µ1 in ein Gebiet mit Permeabilität
µ2 :
Bemerkung
Betrachten wir eine Grenzfläche, die frei von Ladungs- und Strombelagen (σ = 0, α
~ = ~0)
ist, dann folgt für die elektrischen Feldlinien
ε2
tan α2
=
tan α1
ε1
beim Übergang eines Mediums mit Permittivitätszahl ε1 in ein Medium mit Permittivitätszahl ε2 . Für die magnetischen Feldlinien folgt
µ2
tan α2
=
tan α1
µ1
beim Übergang eines Mediums mit Permeabilität µ1 in ein Medium mit Permeabilität
µ2 .
Bemerkung
~ 1 (~r, t) = ~0
Im Spezialfall, dass das mit 1 indizierte Gebiet ein perfekter Leiter ist, gilt E
~ 1 (~r, t) = konstant. Mit entsprechender Anfangsbedinfür alle Punkte im Leiter und B
~ 1 (~r, t) = ~0. Es folgt, sofern auch D
~ 1 und H
~ 1 im Leiter verschwinden
gung gilt ebenfalls B
~2 = α
~n × H
~,
~2 = 0 ,
~n × E
~2 = 0 ,
~n · B
~2 = σ.
~n · D
Hierbei weist der Normalenvektor ~n aus dem Leiter heraus.
15
0.5 Modelle der elektromagnetischen Feldtheorie
In vielen technisch relevanten Situationen braucht nicht das volle System der Maxwellgleichungen angewendet werden, da gewisse Terme, wie z.B. zeitliche Ableitungen der
auftretenden Felder, sich kaum von Null unterscheiden. Im Folgenden werden wir uns
mit vereinfachten Modellen beschäftigen, die durch Vernachlässigung gewisser Terme
in den allgemeinen Maxwell-Gleichungen entstehen. Wir werden die Rechtmäßigkeit
dieser Vereinfachung im Einzelnen diskutieren. Hierbei handelt es sich um
~ und E
~ sind zeitlich konstant, und es gilt J~ = ~0. Die
• die Elektrostatik, d.h. D
elektrischen Felder sind von magnetischen Feldgrößen unabhängig.
~ und H
~ sind zeitlich konstant und von elektrischen
• die Magnetostatik, d.h. B
Feldgrößen unabhängig. Die Anregung erfolgt durch eingeprägte Ströme, die nicht
von den Feldgrößen abhängen.
• Stationäre Strömungsfelder, d.h. elektrische und magnetische Felder sind nur über
~ E)
~ gekoppelt.
eine Materialgleichung J~ = J(
~
∂B
• Elektroquasistatische Felder (kapazitative Felder), d.h. der Induktionsterm −
∂t
in den Maxwellgleichungen wird vernachlässigt.
• Magnetoquasistatische Felder (induktive Felder), d.h. der Verschiebungsstrom
~
∂D
in den Maxwellgleichungen wird vernachlässigt.
∂t
• Schnell zeitlich veränderliche Felder.
16
1
Elektrostatik
Die Grundgleichungen der Elastostatik lauten
Global:
Int.:
U (∂A) = 0
˛
~ · d~r = 0
E
C=∂A
Diff.:
~ = ~0
rot E
Ψ(∂V ) = Q(V )
{
y
~ r) · dA
~=
D(~
%(~r) dV
D=∂V
V
~ = %.
div D
Wir gehen von linearem Materialverhalten mit
~ r) = ε(~r)E(~
~ r)
D(~
und stückweise konstantem ε(~r) aus. An den Grenzflächen verschiedener Materialien
gilt
~2 − E
~ 1) = 0 ,
~n × (E
~2 − D
~ 1) = σ .
~n · (D
Aus der Tatsache, dass elektrische Spannungen über geschlossene Kurven stets ver~ und E
~ reine
schwinden, folgt, dass die durch diese Gleichungen definierten Felder D
Quellfelder sind, die keine geschlossenen Feldlinien (Wirbel) besitzen. Dies hat insbesondere die Existenz eines Potentials zur Folge.
~
Aus dem Satz vom elektrischen Hüllenfluss folgt, dass die Feldlinien des D-Feldes
an
Ladungen beginnen und enden (oder, da es keine geschlossenen Feldlinien gibt, bis nach
~
∞ verlaufen). Bei den Enden der Feldlinien des D-Feldes
kann es sich um tatsächliche
Ladungsüberschüsse auf einem Körper handeln, aber auch um Influenzladungen auf
Leitern. Bildlich kann man sich die Wirkung ruhender elektrischer Ladungen auf entfernte ruhende Ladungen folgendermaßen vorstellen: Die Dichte der von den erzeugen~
den Ladungen ausgehenden D-Feldlinien,
die durch eine entfernte Fläche fließen geben
an, wie groß die Wirkung der erzeugenden Ladung auf eine lokale Testladung auf die~
ser entfernten Fläche ist. Je nach den geometrischen Gegebenheiten nimmt das D-Feld
also entsprechend dem Grad ab, in dem die Feldlinien auseinanderlaufen. Feldlinien
im Außenraum endlich ausgedehnter geladener Körper verteilen sich weit draußen auf
Flächen die mit dem Abstand r proportional zu r2 wachsen. Somit nimmt die Stärke der
dielektrischen Verschiebung proportional zu 1/r2 ab. Wir werden dies im übernächsten
Abschnitt anhand einzelner Beispiele erörtern.
17
1.1 Das elektrostatische Potential
Satz 1.1
~ ein Potential ϕ, d.h., es existiert ein partiell
Im elektrostatischen Modell besitzt E
differenzierbares Skalarfeld ϕ mit
~ = − grad ϕ .
E
Die elektrische Spannung längs einer Kurve C ist im elektrostatischen Modell nur von
Anfangspunkt ~r0 und Endpunkt ~r1 der Kurve abhängig. Es gilt
ˆ
~ r) · d~r = −ϕ(~r1 ) + ϕ(~r0 ) .
E(~
U (C) = −
C
Bemerkung
Das Potential ist nicht eindeutig bestimmt. Mit ϕ ist auch jedes Skalarfeld ϕ + C mit
einer additiven Konstanten C ein Potential (Integrationskonstante). In der Praxis wird
das Potential an einem Punkt willkürlich vorgegeben. Messbar sind nur Spannungen,
also Potentialdifferenzen.
Bemerkung
Ist Q die Ladung eines Teilchens, das längs einer Kurve C von ~r0 nach ~r verschoben
wird, so beträgt die Änderung der potentiellen Energie des Teilchens
∆W = QU (C) = Q(ϕ(r0 ) − ϕ(r)) .
Definition 1.2
Im elektrostatischen Modell ist die Spannung U (~r1 , ~r2 ) zwischen zwei Punkten definiert
durch
U (~r1 , ~r2 ) = ϕ(~r1 ) − ϕ(~r2 ) .
Bemerkung
Das Potential ist an Grenzflächen stetig.
Satz 1.3
In Gebieten mit konstanter Permittivität ε(~r) = ε erfüllt das Potential die PoissonGleichung
∆ϕ(~r) = −
18
%(~r)
.
ε
1.2 Das elektrische Feld einer vorgegebenen
Ladungsverteilung
1.2.1 Ausnutzen von Symmetrien
Wir werden nun den Satz vom elektrischen Hüllenfluss anwenden, um aus symmetrischen Ladungsverteilungen das zugehörige dielektrische Verschiebungsfeld herzuleiten.
Prinzipielles Vorgehen Dazu suchen wir Flächen A mit zwei Eigenschaften:
~ ist konstant auf A
1. |D|
~ zeigt in Richtung der Flächennormalen ~n von A, d.h., es gilt
2. Der Feldvektor D
~
D
= ~n .
~
|D|
In diesem Fall gilt
Ψ(A) =
{
D=∂V
=
{
D=∂V
=
{
D=∂V
~ r ) · dA
~
D(~
~ r) · ~n dA
D(~
~ r)| dA
|D(~
~ r)| |A| ,
= |D(~
wobei |A| der Flächeninhalt von A ist. Der Fluss über solche Flächen lässt sich also
über eine einfache Multiplikation berechnen. Mit dem Satz vom elektrischen Hüllenfluss
folgt
Q
|D(~r)| = ,
A
und unter Berücksichtigung der Richtung des Feldvektors gilt
~ = Q ~n
D
A
Bemerkung
• Um solche Flächen A zu finden, sucht man nach Symmetrien der gegebenen
Raumladungsdichte % bzw. der vorliegenden Ladungsbedeckung.
19
• Ist eine solche Fläche Grenzfläche zwischen Bereichen mit unterschiedlicher Permittivität, so ändert sich bei Abwesenheit von Flächenströmen auf der Grenz~ nicht beim Übergang in das andere Material, da sich
schicht der Feldvektor D
~
die Normalkomponente des D-Feldes
dabei nicht ändert (die Tangentialkomponente, die sich ändern würde, ist hier gleich 0). Der elektrische FeldstärkeVektor ändert sich hingegen entsprechend den Materialgesetzen.
~ = εE
~ mit
• Liegt um die betrachtete Fläche A homogenes Material vor, d.h. D
konstantem ε, so gilt
~ = Q ~n .
E
εA
~ = − grad ϕ Ni• Im letztgenannten Fall sind die betrachteten Flächen wegen E
veauflächen des elektrostatischen Potentials ϕ. Solche Flächen heißen Äquipotentialflächen. Die Spannung zwischen je zwei Punkten auf einer Äquipotentialfläche
beträgt 0 Volt.
• Es gibt auch Fälle, in denen eine nicht geschlossene Fläche A die hier genannten
Forderungen ansonsten erfüllt. Dann ist es manchmal möglich, Hilfsflächen à hinzuzufügen, so dass A∪ à geschlossen ist und der Satz vom elektrischen Hüllenfluss
angewendet werden kann. Die muss so geschehen, dass der Fluss durch à leicht
berechnet werden kann (manchmal kann à so gewählt werden, dass der Fluss 0
ist).
Wir wenden dieses Prinzip nun auf einige symmetrische Situationen an.
Rotationssymmetrische Ladungsverteilung Wir betrachten eine Raumladungsdichte r, die nur vom Abstand r zum Ursprung abhängt und in alle Richtungen (ϑ, ϕ)
gleich ist:
%(~r) = %(r) .
~ nur von r ab und weist stets in die Richtung ~er :
Dann hängt auch D
~ r) = Dr (r)~er .
D(~
Kugelflächen A = ∂Kr um den Ursprung mit Radius r erfüllen die Forderungen aus
dem vorhergehenden Abschnitt, d.h.
~ r)| = Dr (r)
|D(~
ist konstant und
20
~ r)
D(~
= ~er = ~n .
~ r)|
|D(~
Mit dem Satz vom elektrischen Hüllenfluss folgt unter Anwendung des im vorherigen
Abschnitt formulierten Prinzips
y
Dr (r) |∂Kr | =
ρ(r0 ) dV
Kr
ˆ2π ˆπ ˆr
ρ(r0 )r02 sin ϑ dr0 dϑdϕ
=
0
0
0
ˆr
ρ(r0 )r02 dr0 .
= 4π
0
Somit erhalten wir
1
Dr (r) = 2
r
ˆr
ρ(r0 )r02 dr0 .
0
Im Falle einer geladenen Kugel mit Radius R und homogener Ladungsverteilung %(r) =
% für r ≤ R und %(r) = 0 für r > R resultiert hieraus
%
r
,r ≤ R
3 3
Dr (r) = %R
1
,r ≥ R
3 r2
~ = Er (r)~er bei homogenem Material mit
Hieraus folgt für die elektrische Feldstärke E
Permittivität ε
%
r
,r ≤ R
3ε
Er (r) = %R3 1
,r ≥ R
3ε r2
Berücksichtigt man, dass
4π% 3
Q=
R
3
die Gesamtladung ist, so folgt
Q r
,r ≤ R
R3
Er (r) = 4πε
Q 1
,r ≥ R
4πε r2
Bei Setzung ϕ(∞) = 0 gilt für das Potential
ˆ
ϕ(r) = ϕ(r) − ϕ(∞) = −
S(~
r,∞)
~ r) · d~r = −
E(~
ˆ∞
Er (r0 ) dr0 ,
r
wobei ~r = r~er (ϑ, ϕ) ein beliebiger Punkt im Abstand r zum Ursprung ist und S(~r, ∞)
der Strahl von ~r nach ∞ mit konstantem ϑ und konstantem ϕ. Es folt
Q
3
r2
−
,r ≤ R
3
ϕ(r) = 4πε 2R 2R
Q 1
,r ≥ R
4πε r
21
~ r) und ϕ(~r) gelten im Außenraum auch dann,
Dies letzten beiden Beziehungen für E(~
wenn die Gesamtladung Q durch eine symmetrische Ladungsbelegung auf der Kugeloberfläche oder durch eine Punktladung gegeben ist. Im letzten Fall gibt es kein
Kugelinneres, das betrachtet werden könnte, im Falle der Ladungsbelegung auf der
~ r) = E(~
~ r) = ~0 für
Kugeloberfläche folgt mit dem Satz vom elektrischen Hüllenfluss D(~
|~r| < R.
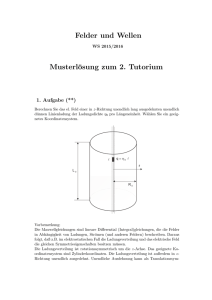
Zylindersymmetrische Ladungsverteilung Wir betrachten eine Raumladungsdichte
ρ̃, die nur vom Abstand % zur z-Achse abhängt:
ρ̃(~r) = ρ̃(%) .
~ nur von % ab und weist stets in die Richtung ~e% :
Dann hängt auch D
~ r) = D% (%)~e% .
D(~
Zylindermäntel A(%, h) um die z-Achse im Abstand % von z = −h bis z = h erfüllen
die Forderungen aus dem vorhergehenden Abschnitt, d.h.
~ r)| = D% (%)
|D(~
ist konstant und
~ r)
D(~
= ~e% = ~n .
~ r)|
|D(~
Der Zylindermantel ist keine geschlossene Fläche. Um das oben genannte Prinzip in
dieser Situation anwenden zu können, muss dieser durch zwei Hilfsflächen, eine Deckund eine Bodenfläche, zur gesamten Oberfläche des Zylinders ∂Z(%, h) vervollständigt
~ liegen aber im Tangentialraum der Deck- und Bodenwerden. Die Feldvektoren D
flächen, so dass der dielektrische Verschiebungs-Fluss durch sie 0 ist. Der Gesamtfluss
durch die konstruierte geschlossene Fläche Ã(%, h) = ∂Z(%, h) ist also der von A(%, h),
d.h.
Ψ(A(%, h)) = Ψ(Ã(%, h)) .
Mit dem Satz vom elektrischen Hüllenfluss folgt unter Anwendung des im vorherigen
Abschnitt formulierten (erweiterten) Prinzips
y
D% (%) |A(%, h)| =
ρ(r0 ) dV
∂Z(%,h)
ˆ2π ˆh ˆ%
ρ̃(%0 )%0 d%0 dz dϕ
=
0 −h 0
ˆr
ρ̃(%0 )%0 d%0 .
= 4πh
0
22
Somit erhalten wir
1
D% (%) =
%
ˆ%
ρ̃(%0 )%0 d%0
0
Im Falle eines unendlich langen geladenen Zylinders mit Radius R und homogener
Ladungsverteilung ρ̃(%) = ρ̃ für % ≤ R und ρ̃(%) = 0 für % > R resultiert hieraus
ρ̃
%
,% ≤ R
2 2
D% (%) = ρ̃R
1
,% ≥ R
2 %
~ r) = E% (%)~e% bei homogenem Material
Hieraus folgt für die elektrische Feldstärke E(~
mit Permittivität ε
ρ̃
%
,% ≤ R
2ε
Er (r) = ρ̃R2 1
,% ≥ R
2ε %
Definiert man den Ladungsbelag qL längs einer Kurve mit Bogenlänge s (auch genannt
Linienladung) durch
∆Q
dQ
qL (~r) = lim
=
,
s→0 ∆s
ds
so gilt hier
qL = πR2 ρ̃ ,
und es folgt
q
L
Er (r) = 2πε
qL
2πε
%
R
1
%
,% ≤ R
,% ≥ R
Für das Potential gilt bei Setzung ϕ(Rb ) = 0 auf einem außerhalb liegenden Zylindermantel mit Rb > R
ˆRb
E% (%0 )d%0 .
ϕ(%) = ϕ(%) − ϕ(Rb ) = −
%
Hierbei wurde als Integrationsweg eine radial verlaufende Strecke mit konstantem ϕ
und konstantem z vom Achsenabstand % zum Achsenabstand Rb gewählt. Es folgt
qL
R
%2 − R2
−
ln
+
,% ≤ R
2πε
Rb
2R2
ϕ(%) =
− qL ln %
,% ≥ R
2πε
Rb
~ r) und ϕ(~r) im Außenraum gelten auch dann,
Dies letzten beiden Beziehungen für E(~
wenn der Zylinderradius 0 beträgt, d.h. im Falle einer gradlinigen homogenen Linienenladung qL auf der z-Achse.
23
Eindimensionale ebene Ladungsverteilung Wir betrachten eine Raumladungsdichte
ρ̃, die nur von einer kartesischen Raumkoordinate, z.B. x, abhängt:
%(~r) = %(x) .
~ nur von x ab und weist stets in die Richtung ~ex :
Dann hängt auch D
~ r) = Dx (x)~ex .
D(~
Flächen A(x) parallel zur yz-Ebene mit konstanter x-Koordinate x und konstantem
Einheitsnormalenvektor ~ex erfüllen die Forderungen aus dem vorhergehenden Abschnitt,
d.h.
~ r)| = Dx (x)
|D(~
ist konstant und
~ r)
D(~
= ~ex = ~n .
~ r)|
|D(~
Solche Flächen A sind keine geschlossenen Flächen. Um das oben genannte Prinzip in
dieser Situation anwenden zu können, müssen zwei kongruente Flächen dieser Art A(x1 )
und A(x2 ) betrachtet werden sowie eine Mantelfläche M , so dass A(x1 ) ∪ A(x2 ) ∪ M ein
prismenförmiges Volumen V mit Deckfläche A(x1 ) und Bodenfläche A(x2 ) berandet.
~ im Tangentialraum der Mantelfläche liegen, ist der dielektriDa die Feldvektoren D
sche Verschiebungs-Fluss durch M gleich 0. Der Gesamtfluss durch die konstruierte
geschlossene Fläche à = A(x1 ) ∪ A(x2 ) ∪ M ist also für x1 > x2
Ψ(Ã) = Ψ(A(x1 )) − Ψ(A(x2 )) .
Mit dem Satz vom elektrischen Hüllenfluss folgt unter Anwendung des im vorherigen
Abschnitt formulierten (erweiterten) Prinzips
y
(Dx (x1 ) − Dx (x2 )) |A(x1 )| =
ρ(x0 ) dV
V
ˆ
ˆx1
ρ(x0 ) dx0 dA
=
A(x1 ) x2
ˆx1
%(x0 ) dx0 .
= |A(x1 )|
x2
Somit erhalten wir
ˆx1
%(x0 ) dx0 .
Dx (x1 ) = Dx (x2 ) +
x2
Gehen wir davon aus, dass %(x) = 0 gilt für |x| > c mit einer Konstanten c > 0, so ist
die Normierung
Dx (−x) = −Dx (x)
für x >> c
24
aus Symmetriegründen sinnvoll. Aus
ˆx
%(x0 ) dx0
Dx (x) + Dx (ξ) = Dx (x) − Dx (−ξ) =
−ξ
ˆξ
%(x0 ) dx0
Dx (x) − Dx (ξ) = −(Dx (ξ) − Dx (x)) = −
x
für ξ >> c und ξ > x, Addition beider Gleichungen und anschließend Grenzübergang
ξ → ∞ folgt
x
ˆ
ˆ∞
1
Dx (x) = %(x0 ) dx0 − %(x0 ) dx0
2
−∞
x
Im Falle einer homogen geladenen planparallelen Platte (d.h. %(x0 ) = %) im Bereich
|x| ≤ c folgt mit der Abschätzung
ˆ c
σ=
%(x0 ) dx0 = 2%c
−c
σ
−
2
σ x
, x ≤ −c
, |x| ≤ c
2 c
σ
,x ≥ c.
2
~ = Er (r)~er bei homogenem Material mit
Hieraus folgt für die elektrische Feldstärke E
Permittivität ε
σ
−
, x ≤ −c
2ε
σ x
Ex (x) =
, |x| ≤ c
2ε c
σ
,x ≥ c.
2ε
Für das Potential
ˆ x
ϕ(x) = ϕ(x) − ϕ(xb ) = −
Ex (x0 ) dx0
Dx (x) =
xb
bei Setzung ϕ(xb ) = 0 auf einer Ebene x = xb < −c folgt schließlich
σ
, x ≤ −c
− (−x + xb )
2
2ε
2
σ x +c
ϕ(x) = −
+ xb
, |x| ≤ c
2ε
2c
− σ (x + xb )
,x ≥ c.
2ε
Von außen her betrachtet, verhält sich die homogene, planparallele Platte so, als ob
die gesamte Ladung als homogene Flächenladung σ = 2%c in x = 0 konzentriert wäre.
25
Für den letztgenannten Fall gilt
Ex (x) =
und
ϕ(x) = −
Hierbei ist
σ
sgn(x)
2ε
σ
(|x| + xb ) .
2ε
−1
sgn(x) = 0
1
,x < 0
,x = 0
,x > 0
Bezeichnet man den Halbraum x < 0 als Gebiet G1 und den Halbraum x > 0 als
Gebiet G2 , dann folgt mit ~n = ~ex für die Flächenladung
~2 − D
~ 1 ) = ε(Ex (0+ ) − Ex (0− )) =
~n · (D
σ
(sgn(0+ ) − sgn(0− )) = σ
2
1.2.2 Superposition von Punktladungen
Satz 1.4
Am Ort ~r0 befinde sich eine Punktladung der Größe Q0 . Dann gilt
0
0
~ r) = Q ~r − ~r
E(~
4πε0 |~r − ~r0 |3
und
ϕ(~r) =
Q0
1
.
4πε0 |~r − ~r0 |
Definition 1.5
Die Grundlösung oder Greensche Funktion der Poisson-Gleichung ist definiert durch
G(~r, ~r0 ) =
1
1
.
4π |~r − ~r0 |
Hierbei wird ~r Aufpunkt bezeichnet (Ort der Funktionsauswertung) und ~r0 Quellpunkt
(Ort der punktförmigen Erregung).
Bemerkung
Eine Punktladung Q am Ort ~r0 verursacht das Potential
ϕ(~r) =
und das elektrische Feld
26
Q
G(~r, ~r0 )
ε0
~ r) = − Q grad G(~r, ~r0 ) .
E(~
ε0
Bemerkung
Punktladungen Qk an den Orten ~rk0 (1, . . . , N ) verursachen infolge des Superpositionsprinzips das Potential
N
X
Qk
G(~r, ~rk0 )
ϕ(~r) =
ε0
k=1
und das elektrische Feld
~ r) = −
E(~
N
X
Qk
ε0
k=1
grad G(~r, ~rk0 ) .
Vorlesungen über Theoretische Elektrotechnik – Prof. Dr.-Ing. Stefan Kurz
76
Das Superpositionsprinzip kann noch allgemeiner angewendet werden, um die elektrischen Felder kontinuierlicher Ladungsverteilungen und deren Potentiale zu ermitteln.
Dabei werden die elektrischen Felder (bzw. Potentiale) infinitesimaler Ladunger unendlich vieler Ladungsträger summiert, was formal zu einem Integral führt. So können
die elektrischen Felder von Raumladungsdichten %, Ladungsbelegungen σ und Linienladungen ermittelt werden. Die folgende Tabelle gibt eine Übersicht1 .
Tabelle 2.1: Ladungsverteilungen, ihre Potentiale und elektrischen Feldstärken.
Ladungsverteilung Gesamtladung
Potential
Punktladung
Ladung Q
Q(r )
ϕ(r) =
1
Q(r )G(r, r )
ε0
Linienladung
Ladungsbelag qL
Q(C) =
ϕ(r) =
1
ε0
Flächenladung
Ladungsbedeckung σ
Q(A) =
Raumladung
Raumladungsdichte ρ
Q(V ) =
Û
qL ds
C
Ü
σ dA
ϕ(r) =
A
Ý
ρ dV
ϕ(r) =
V
1
ε0
1
ε0
Feldstärke
Û
r ) = − 1 Q(r ) grad G(r, r ).
E(
ε0
r) = − 1
E(
ε0
qL (r )G(r, r ) ds C
Ü
r) = − 1
E(
ε0
σ(r )G(r, r ) dA A
Ý
V
ρ(r )G(r, r ) dV
r) = − 1
E(
ε0
Û
qL (r ) grad G(r, r ) ds A
Ü
σ(r ) grad G(r, r ) dA A
Ý
ρ(r ) grad G(r, r ) dV
V
1.3 Potentialbestimmung durch Lösung der
Poisson-Gleichung
Im Falle einer konstanten Permittivität ε ist das elektrische Skalarpotential Lösung der
Poissongleichung
%(~r)
∆ϕ(~r) = −
,
ε
wobei %(~r) die Raumladungsdichte ist. Für eine stetige Funktion % besitzt diese Gleichung in einem vorgegebenen Volumen Ω viele Lösungen. In einem beschränkten Volumen mit wird die Lösung durch geeignete Randbedingungen eindeutig. Wir werden
gleich die Frage beantworten, welche Art von Randbedingungen aus formaler Sicht
1
aus: Stefan Kurz: Theoretische Elektrotechnik, Teil 1. Hamburg, 2004.
27
sinnvoll sind. Anschaulich stellen Randbedingung den gesamten Einfluss aller elektrischen Phänomene außerhalb des betrachteten Volumens Ω auf das Potentail ϕ dar.
Zuvor wollenb wir aber die Poissongleichung erweitern auf den Fall, dass % nicht durch
eine stetige Funktion gegebene ist, sondern von Punktladungen herrührt.
1.3.1 Laplace-Gleichung mit Punktladungen als rechter Seite
1.3.2 Randbedingungen
Nun werden noch Randbedingungen benötigt. Wir nehmen an, dass alle Randkomponenten elektrisch leitend sind und von außen“ auf konstantem Potential gehalten
”
werden. D.h., ϕ ist auf jeder Randkomponente von Ω konstant. Ferner soll die Potentialdifferenz jeder Komponente des Randes zu einer festen Komponente bekannt sein.
Auf dieser festen Komponente setzen wir das Potential auf 0V. Wir suchen also die
Lösung der Gleichung
∆ϕ(~r) = 0 ,
~r ∈ Ω
(1.1)
unter vorgegebenen, bekannten Randbedingungen der Form
ϕ(~r) = g(~r) ,
~r ∈ ∂Ω ,
mit einer bekannten Funktion g. Eine Gleichung vom Typ 1.1, heißt partielle Differentialgleichung (PDG). Sie stellt eine algebraische Beziehung für einen Differentialoperator
her, in dem partielle Ableitungen bezüglich unterschiedlicher Variablen auftreten. Die
Ordnung der höchsten auftretenden partiellen Ableitung heißt Ordnung der PDG. Eine PDG alleine ist nicht eindeutig lösbar. Es sind weitere Daten erforderlich. Ist die
gesuchte Lösungsfunktion ϕ auf dem Rand bekannt, so liegt ein sogenanntes DirichletProblem vor. Allgemein spricht man von einem Randwertproblem, wenn eine PDG so
gelöst werden soll, dass gewisse Randeigenschaften der Lösung gegeben sind. Hinsichtlich der Lösbarkeit des Dirichlet-Problems gilt der folgende Satz:
Satz und Definition 1.6
Das Gebiet Ω besitze einen hinreichend glatten Rand. Ferner sei f eine stetige Funktion
in Ω, und g eine stetige Funktion auf ∂Ω. Dann ist das Dirichlet-Problem
∆ϕ = f
in Ω ,
ϕ=g
auf ∂Ω
eindeutig lösbar. Die vorliegende Randbedingung heißt Dirichlet-Bedingung (vergl. Bild
??).
Satz und Definition 1.7
Das Gebiet Ω besitze einen hinreichend glatten Rand. Ferner sei f eine stetige Funktion
28
in Ω, und h eine stetige Funktion auf ∂Ω. Dann ist das Neumann-Problem
∆ϕ = f
in Ω ,
grad ϕ · ~n0 = h auf ∂Ω
bis auf eine additive Konstante eindeutig lösbar. Hierbei ist ~n0 eine äußere Einheitsnormale an ∂Ω. Der Ausdruck
∂ϕ
= grad ϕ · ~n0
∂~n
heißt Normalenableitung von ϕ.
Durch Festlegung des Wertes der Lösung in einem Punkt ~r0 ∈ Ω kann die additive
Konstante eindeutig bestimmt werden.
Satz und Definition 1.8
Das Gebiet Ω besitze einen hinreichend glatten Rand. Auf einem Teil ΓD des Randes,
dem sogenannten Dirichlet-Rand, sei eine stetige Funktion g gegeben und auf ∂Ω \ ΓN ,
dem sogenannten Neumann-Rand sei eine stetige Funktion h gegeben. Ist ΓD 6= ∅, so
ist das Problem
∆ϕ = f
in Ω ,
ϕ=g
auf ΓD ,
grad ϕ · ~n0 = h auf ΓN
eindeutig lösbar.
Nachdem die Frage der Existenz und Eindeutigkeit von Lösungen der Poissongleichung
bei geeigneten Randbedingungen geklärt ist, wenden wir uns nun der Bestimmung
von Lösungen potentialtheoretischer Randwertaufgaben zu. Wir werden exemplarische
den Fall einer Beschreibung des vorliegenden Volumens in kartesischen Koordinaten
und in Zylinderkoordinaten behandeln. In beiden Fällen ist die Idee, einen Vorrat an
Grundlösungen zusammenzustellen, die in ihrer Gesamtheit ein vollständiges Orthonormalsystem bezüglich einer oder mehrerer Veränderlicher bilden. Durch Superposition
können dann daraus Lösungen konstruiert werden, die die Randbedingungen zumindest
auf einem Teil des gegebenen Volumens erfüllen. Gelingt es, sicherzustellen, dass auf
allen andren Teilen des Randes die Grundlösungen Null-Randdaten annehmen, kann
die Gesamtlösung aus mehreren Teillösungen dieser Art überlagert werden (erneut
Superposition). Die benötigten Grundlösungen werden durch einen Separationsansatz
ermittelt. Dabei wird eine gewisse Form der Lösung als Ansatz vorgegeben, die ein
Produkt von Faktoren ist, die jeweils nur von einer Raumvariablen abhängen. Durch
Einsetzen dieses Ansatzes in die Poisson-Gleichung folgen gewöhnliche Differentialgleichungen zur Bestimmung der einzelnen Faktoren.
1.3.3 Separation bei karthesischen Koordinaten
Ein ladungsfreier Quader – noch zu ergänzen –
29
Ein Quader mit einer geladenen Schicht Wir betrachten wieder den Quader
Q = [0, a] × [0, b] × [0, c] ,
und nehmen an, dass er von einem homogenen nichtleitenden Material mit Permittivität ε angefüllt ist. Diesmal suchen wir ein elektrisches Skalarpotential unter homogenen Randbedingungen
ϕ(x, y, z) = 0 auf ∂Q .
Das Potential ϕ ist unter diesen Bedingunen nur dann von Null verschieden, wenn
Ladungen in Q vorhanden sind. In diesem Beispiel gehen wir davon aus, dass auf einer
Ebene {(x, y, z0 ) : 0 ≤ x ≤ a , 0 ≤ y ≤ b} mit 0 < z0 < c eine Ladungsbelegung σ(x, y)
vorgegeben ist. Die differentielle Form der Maxwellgleichungen und somit die daraus
abgeleitete Poisson-Gleichung gelten dann nur noch im Inneren der Teil-Volumina
Q1 = [0, a] × [0, b] × [0, z0 ]
und
Q2 = [0, a] × [0, b] × [z0 , c] ,
d.h., es gilt
∆ϕ(x, y, z) = 0
auf Q1
∆ϕ(x, y, z) = 0
auf Q2 .
Diese stückweise “ definierte partielle Differentialgleichung muss noch um die aus der
”
globalen Form der Maxwell-Gleichungen folgenden Übergangsbedingungen für
1. das Potential (Stetigkeit),
2. die Tangentialkomponenten des elektrischen Feldes − grad ϕ (Stetigkeit) und
3. die Normalkomponente des dielektrischen Verschiebungsfeldes −ε grad ϕ (Sprunghöhe
= Ladungsbelegung) ergänzt werden,
damit ϕ in Q eindeutig bestimmt ist (siehe unten). Es sei ϕ1 die Einschränkung des gesuchten elektrischen Skalarpotentials auf das Teilvolumen Q1 und ϕ2 die Einschränkung
des gesuchten elektrischen Skalarpotentials auf das Teilvolumen Q2 . Da ϕ1 unter den
gegebenen Randbedingungen Lösung einer homogenen Poisson-Gleichung (LaplaceGleichung) in Q1 mit Dirichlet-Null-Randbedingungen auf den fünf Randflächen x = 0,
x = a, y = 0, y = b und z = 0 ist, wissen wir aus dem vorhergehenden Abschnitt, dass
ϕ1 eine Funktion von der Form
q
nπ 2
mπ 2
sinh
+ b z
∞
a
X
mπy
nπx
(1)
q
sin
ϕ1 (x, y, z) =
Cn,m sin
a
b
nπ 2
mπ 2
n,m=1
sinh
+ b z0
a
30
(1)
ist, wobei die Koeffizienten Cn,m in diesem Fall so zu wählen sind, dass die oben genannten Übergangsbedingungen stimmen (siehe unten). Genauso ist ϕ2 unter den gegebenen
Randbedingungen Lösung einer homogenen Poisson-Gleichung (Laplace-Gleichung) in
Q2 mit Dirichlet-Null-Randbedingungen auf den fünf Randflächen x = 0, x = a, y = 0,
y = b und z = c ist. Wiederum aus dem vorhergehenden Abschnitt folgt, dass ϕ2 eine
Funktion von der Form
q
nπ 2
mπ 2
sinh
+ b (c − z)
∞
a
X
mπy
nπx
(2)
q
sin
ϕ2 (x, y, z) =
Cn,m sin
2
2
a
b
nπ
mπ
n,m=1
sinh
+ b (c − z0 )
a
(2)
ist, wobei die Koeffizienten Cn,m ebenfalls aus den oben genannten Übergangsbedingungen
(1)
(2)
folgen. Wir werden nun die Bestimmung der Cn,m und Cn,m gemäß den oben angeführten Übergangsbedingungen realisieren:
1. Aus der Stetigkeit des Potentials ϕ folgt
(1)
(2)
Cn,m
= Cn,m
=: Cn,m
für alle n, m ∈ N.
2. Aus 1.) folgt, dass die Stetigkeit der Tangentialkomponenten des elektri~ = − grad ϕ
schen Feldes E
∂ϕ1 ∂ϕ2 ∂ϕ1 ∂ϕ2 =
=
∂x z=z0
∂x z=z0
∂y z=z0
∂y z=z0
sowieso erfüllt ist.
3. Aus der Sprungbedingung für die Normalkomponente des dielektrischen
~ = −ε grad ϕ
Verschiebungsfeldes D
∂ϕ1
∂ϕ2
ε
−ε
(x, y, z0 ) = σ(x, y)
∂z
∂z
folgt
q
∞
X
nπ 2
a
q
cosh
q
nπ 2
a
mπ 2
z0
b
+
nπ 2
mπ 2
sinh
+ b z0
a
q
q
nπ 2
mπ 2
nπ 2
mπ 2
+ b cosh
+ b (c − z0 )
a
a
q
+
2
2
nπ
mπ
+
(c
−
z
)
sinh
0
a
b
nπx
mπy
Cn,m sin
sin
a
b
n,m=1
+
mπ 2
b
∞
X
σn,m
nπx
mπy
=
sin
sin
,
ε
a
b
n,m=1
31
wobei
σ(x, y) =
∞
X
σn,m
nπx
mπy
sin
sin
ε
a
b
n,m=1
die Entwicklung der gegebenen Ladungsbelegung bezüglich des Orthogonalsystems
gn,m (x, y) = sin
mπy
nπx
sin
a
b
ist. Für die Fourier-Koeffizienten σn,m gilt
σn,m
4
=
ab
ˆa ˆb
σ(x0 , y 0 ) sin
0
Koeffizientenvergleich mit
q
Kn,m
nπ 2
a
:=
q
+
sinh
q
q
q
mπ 2
b
cosh
q
nπ
a
q
mπ 2
b
+
sinh
0
sinh
nπ 2
a
=
+
nπx0
mπy 0 0 0
sin
dx dy .
a
b
cosh
q
nπ 2
a
nπ 2
a
+
+
nπ 2
a
+
2
mπ 2
+ b z0
nπ 2
a
+
− z0 )
− z0 )
q
nπ 2
sinh
+
a
q
mπ 2
nπ 2
nπ 2
+
z
+
sinh
0
a
b
a
ergibt
Cn,m =
mπ 2
(c
b
mπ 2
(c
b
mπ 2
b
mπ 2
z0
b
mπ 2
c
b
mπ 2
(c
b
− z0 )
σn,m
1
·
.
ε
Kn,m
Bei der Umformung der Kn,m wurde das Additionstheorem der hyperbolischen Funktionen
sinh(x + y) = sinh x cosh y + cosh x sinh y
angewendet. Der Koeffizientenvergleich ergibt schließlich
q
q
nπ 2
mπ 2
nπ 2
mπ 2
sinh
+ b z0 sinh
+ b (c − z0 )
a
a
σn,m
Cn,m =
q
q
ε
nπ 2
mπ 2
nπ 2
mπ 2
+ b sinh
+ b c
a
a
Die Greensche Funktion des Dirichlet-Problems in einem Quader Wir betrachten
nun erneut die Rechnung im vorhergehenden Abschnitt für den Spezialfall
σ(x, y) = Qδ(x − x0 )δ(y − y0 )
32
mit 0 < x0 < a und 0 < y0 < b. Dies ist speziell die Ladungsbelegung, die von einer
Punktladung der Größe Q an der Stelle (x0 , y0 , z0 ) ∈ Q erzeugt wird. Die FourierEntwicklung der punktförmigen Ladungsverteilung hat die Form
σn,m =
nπx0
mπy0
4Q
sin
sin
.
ab
a
b
Somit folgt
∞
4Q X
nπx
nπx0
mπy
mπy0
ϕx0 ,y0 ,z0 (x, y, z) =
sin
sin
sin
sin
ab n,m=1
a
a
b
b
q
nπ 2
a
sinh
mπ 2
+
q
b
1
q
sinh
nπ 2
a
+
mπ 2
z
b
q
+
sinh
+
− z0 )
q
q
·
nπ 2
mπ 2
nπ 2
mπ 2
+ b (c − z) sinh
+ b z0
sinh
a
a
nπ 2
a
mπ 2
c
b
nπ 2
a
mπ 2
(c
b
, 0 ≤ z ≤ z0
, z0 ≤ z ≤ c
Die hierdurch definierte Funktion ϕx0 ,y0 ,z0 (x, y, z) löst die Poisson-Gleichung
ϕ
δ(~r − ~r0 )
δ(x − x0 )δ(y − y0 )δ(z − z0 )
∆ (~r) = −
=−
Q
ε
ε
mit homogener Dirichlet-Randbedingungen ϕx0 ,y0 ,z0 (x, y, z) = 0 auf ∂Q. Wir nennen
die Funktion
ϕx0 ,y0 ,z0 (x, y, z)
GQ (~r, ~r0 ) = GQ (x, y, z, x0 , y 0 , z 0 ) :=
Q
die Greensche Funktion des Dirichlet-Problems im Quader Q. Aus ihr kann bei vorgegebener Raumladungsdichte %(~r0 ) das elektrische Skalarpotential mit homogenene
Dirichlet-Randbedingungen durch Superposition konstruiert werden:
y
ϕ(~r) =
GQ (~r, ~r0 ) %(~r0 ) dV 0 .
Q
Allgemein ist die Greensche-Funktion des Dirichlet-Prinzips wie folgt definiert:
Satz und Definition 1.9
Gegeben sei ein Volumen V mit ausreichend glatter Oberfläche ∂V . Dann existiert für
alle Punkte r0 ∈ V die Lösung GV (~r, ~r0 ) des Dirichlet-Problems
∆ϕ(~r) = −
δ(~r − ~r0 )
,
ε0
ϕ(~r) = 0 auf ∂V .
Die Funktion GV (~r, ~r0 ) heißt Greensche Funktion des Dirichlet-Problems im Volumen
V . Die Greensche Funktion ist die Antwort des durch die Poisson-Gleichung beschrier0 )
benen linearen Systems auf einen normierten Impuls − δ(~rε−~
(Impulsantwort). Die
0
Lösung der Poisson-Gleichung ϕ% (~r) mit vorgegebener Raumladungsdichte %(~r) kann
33
(bei gleichen – hier homogenen Dirichlet- – Randbedingungen) aus der Impulsantwort
durch Superposition ermittelt werden:
y
ϕ% (~r) =
GV (~r, ~r0 ) %(~r0 ) dV 0 .
V
Eine besondere Eigenschaft der Greenschen Funktion wird deutlich, wenn sie als Kernfunktion
Ψ(~r0 ) = GV (~r, ~r0 )
in die zweite Greensche Formel
y
{ ∂Ψ
∂ϕ
−Ψ
dA
ϕ∇Ψ − Ψ∇ϕ =
ϕ
∂n
∂n
V
A=∂V
eingesetzt wird, und für ϕ die Lösung der Laplace-Gleichung
∆ϕ = 0 ,
ϕ(~r) = h(~r) auf ∂V
eingesetzt wird:
Satz 1.10
Ist GV (~r, ~r0 ) die Greensche Funktion des Dirichlet-Problems in V , und löst ϕ die
Laplace-Gleichung
∆ϕ = 0 ,
ϕ(~r) = h(~r) auf ∂V ,
so gilt
ϕ(~r) = −ε0
{
A=∂V
h(~r0 )
∂~r0 G(~r0 , ~r)
dA0 ,
∂n
das heißt, mit der Normalenableitung der Greenschen Funktion kann das Potential
der homogenen Poisson-Gleichung (Raumladungsdichte Null) aus den vorgegebenen
Dirichlet-Randdaten für das Potential ermittelt werden.
Analog kann auch bezüglich des Neumann-Problems vorgegangen werden:
Satz und Definition 1.11
Gegeben sei ein Volumen V mit ausreichend glatter Oberfläche ∂V . Dann existiert für
alle Punkte r0 ∈ V die Lösung NV (~r, ~r0 ) des Neumann-Problems
∆ϕ(~r) = −
δ(~r − ~r0 )
,
ε
∂ϕ
1
(~r) = −
auf ∂V .
∂n
ε|∂V |
(Anders als beim Dirichlet-Problem kann eine Punktladung keine konstante NeumannBedingung mit Wert 0 auf dem Rand erzieln. Dies folgt aus dem Satz vom elektrischen
Hüllenfluss:
{ ∂ N (~r, ~r0 )
1 { ~ 0
~
r V
~ 0 = −ε
dA0 )
1=
D(~r ) · dA
Q
∂n
A=∂V
34
A=∂V
Die Funktion NV (~r, ~r0 ) heißt Greensche Funktion des Neumann-Problems im Volumen
V . Die Greensche Funktion ist die Antwort des durch die Poisson-Gleichung beschrier0 )
(Impulsantwort). Die
benen linearen Systems auf einen normierten Impuls − δ(~rε−~
0
Lösung der Poisson-Gleichung ϕ% (~r) mit vorgegebener Raumladungsdichte %(~r) kann
(bei gleichen – hier konstanten Neumann- – Randbedingungen) aus der Impulsantwort
durch Superposition ermittelt werden:
y
ϕ% (~r) =
NV (~r, ~r0 ) %(~r0 ) dV 0 .
V
Auch im Falle Neumannscher Randbedingungen kann die Greenschen Funktion als
Kernfunktion in der zweiten Greenschen Formel verwendet werden:
y
{ ∂Ψ
∂ϕ
ϕ
ϕ∇Ψ − Ψ∇ϕ =
−Ψ
dA .
∂n
∂n
V
A=∂V
Hierbei ist ϕ die Lösung der Laplace-Gleichung
∆ϕ = 0 ,
∂ϕ
(~r) = h(~r) auf ∂V .
∂n
Es folgt;
Satz 1.12
Ist NV (~r, ~r0 ) die Greensche Funktion des Neumann-Problems in V , und löst ϕ die
Laplace-Gleichung
∂ϕ
∆ϕ = 0 ,
(~r) = h(~r) auf ∂V ,
∂n
so gilt
{
ϕ(~r) = ε0
ϕh(~r0 ) NV (~r, ~r0 ) dA0 + C ,
A=∂V
mit der Konstanten
v
C = A=∂V
ϕ(~r0 ) dA0
|∂V |
.
Das heißt, mit der Greenschen Funktion das Potential der homogenen Poisson-Gleichung
(Raumladungsdichte Null) aus den vorgegebenen Neumann-Randdaten für das Potential
ermittelt werden kann.
1.3.4 Separation bei Zylinderkoordinaten
Gesucht wird das elektrische Skalarpotential V = V (%, ϕ, z) in einem Volumen, das in
Zylinder-Koordinaten
~r = %~e% + ϕ~eϕ + z~ez
parametrisiert ist. Wir betrachten den Spezialfall, dass die Raumladungsdichte im Volumen 0 beträgt. Zu lösen ist also die homogene Poisson-Gleichung (im vorliegenden
35
homogenen Fall auch Laplace-Gleichung genannt)
∂
1 ∂2
1 ∂
∂2
% V (%, ϕ, z) + 2 2 V (%, ϕ, z) + 2 V (%, ϕ, z)
0 = ∆V (%, ϕ, z) =
% ∂%
∂%
% ∂ϕ
∂z
(1.2)
in Zylinderkoordinaten. Der allgemeine Separationsansatz zur Beschaffung eines Vorrats an Grundlösungen lautet
V (%, ϕ, z) = R(%)Φ(ϕ)Z(z) .
(1.3)
Einsetzen dieses Ansatzes in die partielle Differentialgleichung (1.2) ergibt nach Division durch R(%)Φ(ϕ)Z(z)
1 Φ00 (ϕ) Z 00 (z)
1 ∂
(%R0 (%)) + 2
+
= 0.
%R(%) ∂%
% Φ(ϕ)
Z(z)
(1.4)
Der dritte Summand ist unabhängig von % und ϕ, währen die ersten beiden Summanden
unabhängig von z sind. Der dritte Summand ist somit konstant. Theoretisch können
drei Fälle eintreten: Der dritte Summand ist
1. gleich einer positiven Konstante k 2 > 0,
2. gleich Null, d.h. k 2 = 0,
3. gleich einer negativen Konstante −k 2 < 0.
Ob der zweite Fall k 2 = 0 eintritt, hängt vom gegebenen Problem ab: Dies ist genau
dann der Fall,
• das gegebene Volumen in z-Richtung unendlich ausgedehnt ist, und alle Querschnittsflächen parallel zur (x, y)-Ebene identisch sind,
• die auf dem Rand, den wir als Zylindermantel annehmen, gegebenen Daten nicht
von z und somit nur von ϕ abhängen.
Die Frage ob k 2 = 0 ist oder nicht, können wir also nicht beeinflussen. Dagegen können
wir im Falle, dass der oben geschilderte symmetrische Fall nicht eintritt, wählen, ob
wir mit k 2 > 0 oder mit k 2 < 0 arbeiten wollen. Mit dieser Entscheidung beeinflussen
wir, welche Grundlösungen wir als Vorrat“ für die Konstruktion der Randdaten über
”
Superposition erhalten. Liegen z-abhängige Randdaten vor, so ist unbedingt die negative Separationskonstante −k 2 zu wählen, da andernfalls keine Orthogonalentwicklung
der z-abhängigen Randfunktion möglich wird.
Erster Weg: Separationskonstante k 2 > 0
Bestimmung von Z(z): Aus dem Separationsansatz folgt die gewöhnliche Differentialgleichung
Z 00 (z) − k 2 Z(z) = 0 .
36
Eine Darstellung der allgemeine Lösung lautet
Zk (z) = Ek cosh(kz) + Fk sinh(kz)
mit Ek , Fk ∈ R. Es genügt hier, k > 0 zu betrachten.
Für den (%, ϕ) abhängigen Teil von Gleichung (1.4) folgt nach Multiplikation mit %2
% ∂
Φ00 (ϕ)
(%R0 (%)) + %2 k 2 +
= 0.
R(%) ∂%
Φ(ϕ)
(1.5)
Der letzte Summand hängt nur von ϕ ab, die ersten beiden nur von %. Daher ist der
letzte Summand konstant, und wir setzen
Φ00 (ϕ)
= −m2 .
Φ(ϕ)
Hier ist die Wahl einer nichtpositiven Separationskonstante −m2 ≤ 0 sinnvoll, um
ein vollständiges System orthogonaler Funktionen als Lösung zu erhalten, und so ϕabhängige Randdaten durch Fourier-Entwicklung konstruieren zu können.
Bestimmung von Φ(ϕ): Es folgt
Φ00 (ϕ) + m2 Φ(ϕ) = 0 .
Die allgemeine Lösung lautet
C cos(mϕ) + D sin(mϕ)
m
m
Φm (ϕ) =
C 0
,m ∈ N
,m = 0.
Hierbei folgt die Ganzzahligkeit von m daraus, dass nur 2π-periodische Funktionen als
Lösung sinnvoll sind, da ϕ und ϕ + 2π dieselbe Orts-Koordinate darstellen (Drehung
um 360◦ ). Negative Werte von m brauchen nicht berücksichtigt zu werden wegen der
Symmetrieeigenschaften der trigonometrischen Funktionen. Ebenfalls aus dem Grund,
dass nur periodische Lösungen sinnvoll sind, reduziert sich die Lösung im Fall m = 0
auf eine Konstante C0 .
Für den %-abhängigen Teil von Gleichung (1.6) folgt nach Multiplikation mit R(%)
%
∂
(%R0 (%)) + %2 k 2 − m2 R(%) = 0 .
∂%
(1.6)
Bestimmung von R(r):
Nach Division durch %2 k 2 und Anwenden der Produktregel der Differentialrechnung
folgt
1 00
1 0
m2
R (%) + 2 R (%) + 1 − 2 2 R(%) = 0 .
(1.7)
k2
k %
%k
37
Dies ist eine gewöhnliche lineare Differentialgleichung zweiter Ordnung, deren Faktoren
jedoch von der Variable % abhängen, also nicht konstant sind. Ihre Lösungsgesamtheit
ist für gegebenes k > 0 und m ≥ 0 ein Vektorraum der Dimension 2. Zu gegebenen Werten k > 0, m ≥ 0 kann eine Basis mit Hilfe der Besselfunktion Jm und der
Neumannfunktion Nm oder Besselfunktion 2. Art angegeben werden. Für die Besselfunktionen 2. Art ist auch die Bezeichnung Ym gebräuchlich. Die allgemeine Lösung
von Gleichung (1.7) lautet somit
Rk,m (%) = Ak,m Jm (k%) + Bk,m Nm (k%) .
Sind beispielsweise Randdaten auf der Deck- und Bodenfläche eines Zylinders gegeben,
können diese mit Orthogonalentwicklung bezüglich der Besselfunktionen dargestellt
werden. Randdaten auf einem Zylindermantel, die nur von ϕ abhängen, können durch
eine klassische Fourier-Reihe dargestellt werden. Nicht möglich ist eine Reihenentwicklung von z-abhängigen Randdaten. Dazu hätte oben eine negative Separationskonstante −k 2 gewählt werden müssen (siehe 3. Weg). Die Konstruktion von Randdaten wird
unten in Spezialfällen diskutiert.
Zweiter Fall Separationskonstante k 2 = 0:
Bestimmung von Z: Es folgt die gewöhnliche Differentialgleichung
Z 00 (z) = 0 .
Eine Darstellung der allgemeine Lösung lautet
Z(z) = Gz + H
In der Regel wird nur die konstante Lösung Z(z) = H sinnvoll sein (siehe unten). Wir
können dann H = 1 wählen, und die Koeffizienten der anderen Faktoren im ProduktAnsatz entsprechned anpasssen.
Bestimmung von Φ: Aus Gründen der Eindeutigkeit kann m wieder nur ganzzahlig
sein. Wir erhalten wieder die Gleichung
Φ00 (ϕ)
= −m2 .
Φ(ϕ)
Bestimmung von R Wir erhalten
%2 R00 (%) + %R0 (%) − m2 R(%) = 0 ,
m ∈ N0
(1.8)
Dies ist keine Besselsche Differentialgleichung. Ihr Lösungsraum wird durch R(%) = %m
und R(%) = %−m aufgespannt.
38
Anpassung an ausschließlich ϕ-abhängige Randdaten beim unendlichen Zylinder
Wenn ein unendlich langer Zylinder gegeben ist und auf einer Mantelfläche vom Radius
%A Randwerte durch eine nur von ϕ abhängige Funktion f (ϕ) vorgegeben sind, gewinnt
man eine Fourierreihe dieser Funktion
∞
∞
X
A0 X
+
Am cos(mϕ) +
Bm sin(mϕ) .
f (ϕ) =
2
m=1
m=1
(1.9)
Die negativen Exponenten m führen bei der Innenraumaufgabe in einem Vollzylinder
zu Singularitäten. Deshalb kann man sich auf positive Exponenten beschränken. Nach
Koeffizientenvergleich des durch Superposition erstellten Ansatzes an der Stelle % = %A
mit der Reihendarstellung (1.9) für die Funktion f folgt die Lösung
V (%, ϕ, z) = V (%, ϕ)
(1.10)
∞
∞
m
m
X
%
A0 X %
+
Am cos(mϕ) +
Bm
sin(mϕ) .
=
2
%
%
A
A
m=1
m=1
Dritter Weg Separationskonstante −k 2 < 0
Bestimmung von Z: Es folgt die gewöhnliche Differentialgleichung
Z 00 (z) + k 2 Z(z) = 0 .
Eine Darstellung der allgemeinen Lösung lautet
Zk (z) = Ek cos(kz) + Fk sin(kz)
Bestimmung von Φ: Auch hier sind wieder nur ganzzahlige Lösungen für m, die wir
als nichtnegativ annehmen können, sinnvoll.
Bestimmung von R: Wir erhalten an Stelle der gewöhnlichen“ Besselschen Diffe”
rentialgleichung die modifizierte Besselsche Differentialgleichung“
”
1 00
1 0
m2
R (%) + 2 R (%) − 1 + 2 2 R(%) = 0 .
(1.11)
k2
k %
%k
Ihre Lösungen werden durch die modifizierten Besselfunktionen Im (k%) und Km (k%)
mit k > 0 gegeben. Die Im sind im Nullpunkt regulär, die Km singulär. Diese Funktionen sind genau wie die (gewöhnlichen) Besselfunktionen in Tabellenwerken mit ihren
Eigenschaften und Werten verzeichnet, und in Programmbibliotheken oder Systemen
wie MATLAB stehen Unterprogramme zu ihrer Berechnung zur Verfügung.
Anpassung an ausschließlich z-abhängige Randdaten beim endlichen Zylinder
Oben haben wir festgestellt, dass die allgemeine Darstellung der Funktion Z(z) durch
eine Fourierreihe gegeben ist. Wenn keine ϕ-Abhängigikeit zu betrachten ist, können
39
wir m = 0 setzen. Damit erhalten wir als Lösungen für einen Voll-Zylinder mit Radius
%A dessen Achse sich von z = −h bis z = h erstreckt, eine Fourierreihe. Dabei kann man
sich zur Veranschaulichung den gegebenen Zylinder periodisch entlang der z-Achse fortgesetzt vorstellen. Wegen der 2h-Peridozität bezüglich z brauchen nur Grundlösungen
mit k = kn = nπ/h herangezogen werden. Eine Abhängigkeit von der radialen Basisfunktion K0 ist ausgeschlossen, da – wie zuvor – im Inneren des Vollzylinders keine
Singularität auftreten darf. Somit folgt (beachte I0 (0) = 1)
V (%, ϕ, z) = V (%, z)
(1.12)
∞
X
∞
X
E0
I0 (0) +
En I0 (kn %) cos(kn z) +
Fn I0 (kn %) sin(kn z)
2
n=1
n=1
∞
∞
nπ nπ X
nπ nπ E0 X
=
+
En I0
% cos
z +
Fn I0
% sin
z .
2
h
h
h
h
n=1
n=1
=
Die Bestimmung der Koeffizienten En und Fn erfolgt durch Koeffizientenvergleich des
Lösungsansatzes (1.12) an der Stelle % = %A mit der Fourier-Entwicklung der gege
A
benen z-abhängigen Randfunktion. Hierbei kann I0 nπ%
jeweils als Konstante 6= 0
h
betrachtet werden, deren genauer Wert jederzeit aus Tabellen oder mit MATLAB bestimmt werden könnte.
Die Besselsche Differentialgleichung und Verwandte Die Gleichung
1 0
n2
00
y + y + 1− 2 y =0
x
x
(1.13)
für y = y(x) wird als Besselsche Differentialgleichung bezeichnet. In Anwendungen
ist diese Gleichung in der Regel mindestens durch Skalieren des Arguments modifiziert. Eine sehr bequeme Formel, um skalierte Bessel- und Neumann-Funktionen der
zugehörigen Gleichung zuzuordnenn, ist diese:
1 − 2α 0
α2 − n2 γ 2
00
γ−1 2
w +
w + (βγx ) +
w=0
(1.14)
x
x2
wird gelöst durch
w(x) = xα Zn (βxγ )
(1.15)
Dabei bezeichnet Zn irgendeine Linearkombination von Bessel- und Neumann-Funktionen
der Ordnung n.
Eigenschaften der Zylinderfunktionen
x m 1
Jm (x) ≈
2
m!
(m − 1)!
Nm (x) ≈ −
π
40
m
2
x
für |x| << 1
für |x| << 1 , m = 1, 2, . . .
N0 (x) ≈
2 γx
2
ln
≈ ln x für |x| << 1 , (γ ≈ 1, 781)
π
2
π
r
Jm (x) ≈
2
π mπ cos x − −
πx
4
2
r
Nm (x) ≈
π mπ 2
sin x − −
πx
4
2
für x → ∞
für x → ∞
x m 1
Im (x) ≈
für 0 < x << 1
2
m!
m
(m − 1)! 2
Km (x) ≈
für 0 < x << 1 , m = 1, 2, . . .
π
x
K0 (x) ≈ − ln
γx
≈ − ln x für 0 ≤ x << 1 , (γ ≈ 1, 781)
2
ex
Im (x) ≈ √
für x → ∞
2πx
√ −x
πe
Km (x) ≈ √
für x → ∞
2x
1.3.5 Dipole
Gegeben sei eine Punktladungsgruppe von n Ladungen Qi an den Orten ~ri0 . Alle Ladungen befinden sich innerhalb einer Kugel mit Radius R und Mittelpunkt ~rM . Die
Gesamtladung der Punktladungsgruppe beträgt
QS =
n
X
Qi ,
i=1
und der Ladungsschwerpunkt ist
~rS =
n
1 X
Qi~ri0 .
QS i=1
Am weit entfernten Aufpunkt ~r mit |~r − ~rM | >> R ergibt sich dann in Abhängigkeit
von QS näherungsweise das folgende elektrische Skalarpotential (Taylor-Entwicklung):
QS 6= 0: Dann gilt:
QS
R
ϕ(~r) =
G(~r, ~rM ) + O 2
ε0
r
2
QS
R
=
G(~r, ~rS ) + O
,
ε0
r3
R2
→ 0.
r3
41
Die Wahl des Ladungsschwerpunktes als Entwicklungspunkt bewirkt also eine
genauere Approximation des tatsächlichen Feldes. Vom Betrachter an der (weit
entfernten) Position ~r aus betrachtet, stimmt das elektrische Skalarpotential der
Punktladungsgruppe in guter Näherung mit dem Potential
ϕ(~r) =
1
1
QS
G(~r, ~rS ) =
ε0
4πε |~r − ~rS |
einer einzigen Punktladung der Größe QS im Ladungsschwerpunkt überein.
QS = 0: Dann setzen wir
p~ =
X
Qi~ri0 ,
und es gilt2 :
2
1
R
ϕ(~r) = grad~r0 G(~r, ~rM ) + O
ε0
r3
2
1 p~ · (~r − ~rM )
R
=
+
O
,
4πε0 |~r − ~rM |3
r3
R2
→ 0.
r3
Der Vektor p~ wird Dipolmoment der Ladungsgruppe bezeichnet (physikalische
Einheit: C · m = A · s · m). Vom Betrachter an der (weit entfernten) Position ~r
aus betrachtet, stimmt das elektrische Skalarpotential der Punktladungsgruppe
in guter Näherung mit dem Potential
ϕ(~r) =
1 p~ · (~r − ~rM )
4πε0 |~r − ~rM |3
überein. Dieses Potential werden wir im Folgenden als das elektrische Skalarpotential eines sogenannten Punktdipols interpretieren.
Als Beispiel betrachten wir eine Punktladungsgruppe, die aus zwei entgegengesetzten
Ladungen gleichen Betrages Q1 = −Q2 = Q an den Orten ~r10 und ~r20 mit d~ = ~r10 − ~r20
besteht. Ihr Dipolmoment beträgt
p~ = Q~r1 − Q~r2 = Qd~ .
Die oben angeführte Näherung ergibt
1 p~ · (~r − ~rS )
ϕ(~r) =
+O
4πε0 |~r − ~rS |3
R
r2
,
R2
→ 0.
r3
(1.16)
Kräfte auf elektrische Dipole Die potentielle Energie eines Dipols im elektrischen
Feld beträgt
~.
Epot = −~p · E
~ wirkt auf den Dipol das Drehmoment
Im homogenen elektrischen Feld E
~ = p~ × E
~ = Q(d~ × E)
~ .
M
2
grad~r0 bedeutet Gradientenbildung nach der zweiten Variable
42
~ r) wirkt auf den Dipol eine Kraft F~ , die ihn in
Im inhomogenen elektrischen Feld E(~
Bereiche höherer Feldstärke hineinzieht:
~.
F~ = p~ · grad E
Punktdipole Aus weiter Distanz ist es näherungsweise erlaubt, die beiden unterschiedlichen Ladungen eines Dipols als am gleichen Ort befindlich zu betrachten. Dis
führt zur Idsealisierung des sogenannten Punktdipols. Das heißt, wir ordnen einem
Punkt ~r das Dipolmoment p~ zu, ohne uns darüber Gedanken zu machen, wie die Ladungsverteilung im Dipol aus der Nähe betrachtet aussehen würde. Mit eim Dipolmo~ natürlich sehr große Ladungen Q verbunden. Das
ment p~ = Qd~ sind bei sehr kleinem |d|
Potential und die elektrische Feldstärke eines Punktdipols erhalten wir, indem wir in
der Beziehung (1.16) p~ konstant halten, den Quellpunkt ~r0 = ~rS mit dem Schwerpunkt
des Dipols identifizieren und die räumliche Ausdehnung des Dipols auf 0 setzen, d.h.
R = 0.
Satz 1.13
Für das elektrische Skalarpotential ϕ eines Punktdipols mit Dipolmoment p~ am Ort ~r0
gilt
ϕ(~r) =
1 p~ · (~r − ~r0 )
1
p~ · grad~r0 G(~r, ~r0 ) = − grad~r G(~r, ~r0 ) =
.
ε0
4πε0 |~r − ~r0 |3
(1.17)
Folgerung 1.14
Für das elektrische Skalarpotential V eines Punktdipols am Ort ~r0 = ~0 mit Dipolmoment
p~ = p~ez gilt in Kugelkoordinaten (r, ϑ, ϕ)
V (r, ϑ) =
p cos ϑ
.
4πε0 r2
Das elektrische Skalarpotential ist unabhängig vom azimuthalen Winkel ϕ. Durch Bestimmung des Gradienten in Kugelkoordinaten
grad V =
∂V
1 ∂V
1 ∂V
~er +
~eϑ
~eϕ
∂r
r ∂ϑ r sin ϑ ∂ϕ
~ = Er~er +Eϑ~eϑ +Eϕ~eϕ des Punktdipols
folgt für die Komponenten des elektrischen Feld E
2p cos ϑ
4πε0 r3
p sin ϑ
Eϑ (r, ϑ) =
4πε0 r3
Eϕ = 0
Er (r, ϑ) =
43
Polarisierung Die Bausteine der Materie (insbesondere Moleküle) besitzen oft ein Dipolmoment, da die Aufenthaltswahrscheinlichkeit von Elektronen in bestimmten räumlichen Bereichen größer ist als in anderen. Die Dipolmomente einzelner Moleküle sind so
klein, dass sie aus makroskopischer Sicht nur relevant sind, wenn sehr viele, gleichausgerichtete Dipole in einem Volumen V vorliegen. Um das Gesamtfeld räumlich verteilter
(kleiner) Dipole zu beschreiben, wird die räumliche Dipol-Dichte oder elektrische Polarisation eingeführt:
Definition 1.15
Die elektrische Polarisation ist definiert durch
d~p
∆~p
P~ (~r, t) = lim
=
.
∆V →0 ∆V
dV
Aus ihr kann das Dipolmoment p~(V ) eines vorliegenden Volumens V durch Volumenintegration ermittelt werden:
y
p~(V ) =
P~ (~r) dV .
V
In Abwesenheit äußerer elektrischer Felder ist die Ausrichtung dieser Dipole jedoch statistisch so verteilt, dass sich die Dipolfelder aus makroskopischer Sicht neutralisieren3 .
Ein äußeres elektrisches Feld bewirkt nun die Ausrichtung der einzelnen Dipole und erzeugt eine Polarisierung P~ 6= 0. Das nun wiederum aus der Polarisierung resultierende
elektrische Feld wird dem äußeren Feld, das die Polarisierung bewirkt hat, überlagert.
Zur Klärung dieses Phänomens sind nun zwei Schritte zu erledigen:
1. Berechnung des elektrischen Feldes, das aus der Polarisation P eines räumlichen
Bereiches V entsteht,
2. Berechnung der Polarisation P , die durch ein äußeres elektrisches Feld verursacht
wird.
Wir wenden uns zunächst der ersten Aufgabe zu und nehmen an, dass ein Volumen V
gegeben ist mit einer ortsabhängigen Polarisation P~ = P~ (~r). Mit Gleichung (1.17) und
dem Superpositionsprinzip folgt mit den Rechenregeln der Vektoranalysis4
1 y ~ 0
ϕ(~r) =
P (~r ) · grad~r0 G(~r, ~r0 ) dV 0
ε0
V
1 y
1 {
=
(− div P~ (~r0 ))G(~r, ~r0 ) dV 0 +
(~n(~r0 ) · P (~r0 )) G(~r, ~r0 ) dA0
ε0
ε0
V
∂V
wobei ~n(~r0 ) ein äußerer Einheitsnormalenvektor an ∂V im Punkt ~r0 ∈ ∂V ist. Diese
Umformung gibt Anlass zu der folgenden Definition:
3
4
Ausnahmen sind sogenannte Elektrete, die ein permanentes elektrisches Dipolmoment besitzen.
insbesondere der Produktregel für die Divergenz
44
Definition 1.16
Es sei V ein räumlicher Bereich mit Polarisation P~ . Dann definieren wir
a) Die Polarisations-Raumladungsdichte
%p (~r) = − div P~ (~r) ,
~r ∈ V
und
a) die Polarisations-Flächenladungsdichte
σp (~r) = ~n(~r) · P~ (~r) ,
~r ∈ ∂V .
Mit dieser Definition erhalten wir
1 {
1 y
%p (~r0 )G(~r, ~r0 ) dV 0 +
σp (~r0 ) G(~r, ~r0 ) dA0 .
ϕ(~r) =
ε0
ε0
V
∂V
Die bemerkenswerte Aussage hinter dieser Gleichung ist, dass das elektrische Skalarpotential ϕ, das durch eine Dipolverteilung erzeugt wird, deren Volumendichte P~ ist,
genau das gleiche ist, das durch eine Kombination von Raum- und Flächenladungen erzeugt wird. Die hierbei zu verwendende (fiktive) Ersatz-Raumladung beträgt
genau %(~r) = − div P~ (~r) und die an der Oberfläche anzubringende (fiktive) ErsatzLadungsbelegung beträgt σ(~r) = ~n(~r) · P~ (~r). Sofern außer den durch P~ beschriebenen
keine Dipole oder Ladungen vorhanden sind, ist der obige Ausdruck für ϕ(~r) innerhalb
V und im Außenraum von V gültig. Da die konstruierten fiktiven Ersatzladungen ein
Feld erzeugen, das in Wirklichkeit von Dipolen erzeugt wird, müssen sie in ihrer Summe
Null ergeben. Tatsächlich kann durch direkte Rechnung
y
{
%p (~r) dV +
σp (~r) dA = 0 .
V
∂V
bestätigt werden.
Polarisation der Materie durch äußere Felder Wird ein äußeres elektrisches Feld angelegt, so kommt es in der Materie zur Ausrichtung molekularer Dipole und es resultiert
eine nichtverschindende Polarisiation P~ der Materie, die dann ihrerseits gemäß dem
vorhergehenden Abschnitt ein zusätzliches Feld erzeugt, das das äußere Feld überlagert.
Doppelschichten Siehe Folien der Vorlesung
1.3.6 Konstruktion von Randbedingungen
Das elektrische Potential in einem endlichen Raum erfüllt an leitenden Wänden eine Dirichletsche Randbedingung, das heißt, die Wand liegt auf konstantem Potential und die Feldlinien enden im rechten Winkel. Solche Randbedingungen können für
45
die Potentiale von Punktladungsgruppen mit Hilfe der Spiegelungsmethode konstruiert
werden. Dafür werden dem Potential der vorhandenen reellen Ladung das Potential virtueller Ladungen überlagert, die durch Spiegelung konstruiert werden. Die virtuellen
Ladungen existieren nicht wirklich, sie sind ein Hilfsmittel um die Randbedingungen
zu konstruieren.
Spiegelung an Ebenen Siehe Folien der Vorlesung
Spiegelung an einer geerdeten Kugel Siehe Folien der Vorlesung
Spiegelung an einer nicht geerdeten Kugel Siehe Folien der Vorlesung
1.3.7 Kondensatoren
Satz und Definition 1.17
Ein Kondensator ist ein System aus zwei (perfekten) Leitern, die jeweils betraglich die
gleiche Ladung Q und −Q, aber mit unterschiedlichem Vorzeichen tragen. Da es sich
um idealisiert perfekte Leiter handelt, liegt auf jedem Leiter ein konstantes elektrisches
Skalarpotential ϕ vor. Die Potentialdifferenz
U = ϕ(Leiter2 ) − ϕ(Leiter1 )
heißt Spannung des Kondensators. Spannung U und Ladung Q des Kondensators sind
einander proportional. Die Proportionalitätskonstante
C=
Q
U
heißt Kapazität des Kondensators.
Bemerkung 1. Ist A eine geschlossene5 Fläche, die die beiden Leiter des Kondensators trennt und Γ eine Kurve, die die beiden Leiter des Kondensators verbindet
(so orientiert, dass der Anfangspunkt von Γ im Inneren von A liegt), so gilt
v
~ r ) · dA
~
D(~
Γ
~ r) · d~r
E(~
C = A´
.
(1.18)
Diese Gleichung verdeutlicht, dass die Kapazität eines Kondensators von zwei
Dingen abhängt:
5
46
im Allgemeinen ist A eine geschlossene Fläche, jedoch treten in idealisierten Situationen, wie dem
ebenen Plattenkondensator oder dem Zylinderkondensator, Fälle auf, in denen A nicht geschlossen
gewählt wird, da als Folge der Idealisierung Teile des Raums feldfrei sind, und zum elektrischen
”
Trennen“ nur der felderfüllte Raum betrachtet werden muss.
~ und D.
~
• Der Materialgleichung zwischen E
• Geometrischen Eigenschaften des Außenraumes der beiden Leiter
2. Es ist geschickt, in Gleichung (1.18)
• Eine Äquipotentialfläche für A und
• eine Feldlinie für Γ zu wählen.
Dann folgt
C=´
Γ
~
|A||D|
,
~ r)| dr
|E(~
wobei |A| der Flächeninhalt der Äquipotentialfläche A ist.
1.3.8 Elektrostatische Feldenergie
Die Energie, die erforderlich ist, um im Feld einer Ladung Q1 am Ort ~r1 eine Ladung
Q2 von ∞ zum Ort ~r2 zu bringen, beträgt
W1,2 = Q2 ϕ1 (~r2 ) =
1
Q1 Q2
.
ε0 4π|~r1 − ~r2 |
Wird nun zusätzlich eine dritte Ladung Q3 von ∞ zum Ort ~r3 gebracht, so ergibt sich
für die dazu aufzubringende Energie
Q1
1
Q2
1
~ 13 + W
~ 23 .
W1,2,3 = Q3 ϕ1,2 (~r3 ) = Q3
+
=W
ε0 4π|~r1 − ~r3 |
ε0 4π|~r2 − ~r3 |
Die in der entstehenden Konfiguration gespeicherte Gesamtenergie ist nun die Summe
der beiden aufzubringenden Energiebeiträge
~ 1,2 + W
~ 1,3 + W
~ 2,3 .
Wges = W1,2 + W1,2,3 = W
Bei vier Ladungen folgt entsprechend
4
Wges = W1,2,3,4 + W1,2 + W1,3 + W2,3 =
4
4
4
1X X
1 X X Qi Qj
1
Wij =
.
2 i=1 j=1
2 i=1 j=1 4πε0 |~ri − ~rj |
i6=j
i6=j
Bei kontinuierlichen Ladungsverteilungen erhalten wir nach Grenzübergang
W =
1 y y %(~r)%(~r0 ) dV dV 0
.
2
4πε0 |~r − ~r0 |
0
V
V
Wir schreiben dies unter Verwendung von
~ =D
~ · grad ϕ + ϕ div D
~ = −D
~ ·E
~ + %ϕ
div(ϕD)
47
und dem Gaußschen Integralsatz um und erhalten
1y
W =
%(~r)
2
V
=
=
1{
2
|
A
ϕ(~
r)
~ r)) · dA
~+
(%D(~
{z
1y
2
!
1 y %(~r0 )
1y
0
dV
dV
=
%(~r)ϕ(~r) dV
4πε0 0 |~r − ~r0 |
2
V
V
|
{z
}
V
1y
2
V
~ r) · E(~
~ r) dV
D(~
}
=0
~ r) · E(~
~ r) dV.
D(~
In diesem Ausdruck treten nur noch die Feldgröße, nicht aber die Ladung % auf.
1.3.9 Kräfte im Kondensator
Wir betrachten eine Plattenkondensator, dessen Platten sich im Abstand d befinden.
Die Fläche einer Platte betrage A.
Kräfte zwischen den Platten Es gilt F~ = − grad W und
W =
1
1y ~ ~
~ |D|
~
E · D dV = Ad|E|
2
2
V
~ = ε0 εr Q ~ed und E
~ = 1 D
~ = 1 Q ~ed . Hierbei ist ~ed ein Normaleneinheitsvektor
mit D
A
ε0 εr
ε0 εr A
an die positiv geladene Platte, der in Richtung der negativ gelandenen Platte weist.
Also ist
1 2
Q2 C 2 2
1
W =
Q d=
U d = CU 2
2εA
2C 2εA
2
mit ε = ε0 εr . Für die Kraft folgt nun
∂W
Q2
~
F = − grad W = −
~ed = −
~ed .
∂d
2εA
Bemerkung
Offensichtlich gilt
2
~ = − Q ~ed .
~ = −QD
F~ 6= −QE
ε0
ε0 A
Zwei Dielektrika Zur Berechnung der Kräfte, die in einer statischen Situation auftreten, kann das Prinzip der virtuellen Verschiebung verwendet werden. Dazu wird
berechnet, wie sich die Energie einer Konfiguration bei Variation der Geometrie ändert.
Wir betrachten einen Plattenkondensator dessen rechteckige Platten parallel zur xyEbene verlaufen, einen Abstand d voneinander haben und eine Fläche von A = `a
haben. Für 0 < ξ ≤ x liege zwischen den Platten ein Dielektrikum mit der Permeabilität ε1 und für ξ ≥ x ein Dielektrikum mit der Permeabilität ε2 vor. Diese Dielektrika
48
erstrecken sich auch über den Kondensator hinaus. Für die gespeicherte Feldenergie
folgt nun
U2
U2
1 ε1 A1 ε2 A2
+
U2 =
(ε1 A1 + ε2 A2 ) =
(ax + a(` − x)).
W (x) =
2
d
d
2d
2d
Hier ist es sinnvoll W über U zu berechnen und nicht über Q, da in dieser Konfiguration
U auf den Platten konstant ist.
Die Kraft, die auf die Konfiguration wirkt, berechnen wir nun, indem wir die durch x
beschriebene Lage der Dielektrika leicht zu x + ∆x ändern und die Energieänderung
∆W bestimmen. Im Grenzfall ∆x −→ 0 erhalten wir
1~ ~
∂W
1~ ~
~ex = E
F~ = − grad W = −
1 · D1 − E2 · D2 .
∂x
2
2
49
2
Stationäre Strömungsfelder
Im Gegensatz zur Elektrostatik können sich Ladungen im Rahmen der Theorie stationärer Strömungsfelder bewegen, das heißt, es fließt ein Strom.
Wir definieren den Strom durch eine Fläche A als Grenzwert der Ladungsmenge ∆Q
pro Zeiteinheit ∆t , die A durchströmt, für ∆t −→ 0:
dQ
.
∆t→0 dt
I(A) = lim
Die Stromdichte ist das Vektorfeld J~ mit
~ r) = dI(Ak )
~nk · J(~
dAk
(2.1)
mit dem Normaleneinheitsvektor ~nk an die Fläche Ak . Durch Wahl von drei Flächen
A1 , A2 und A3 mit linear unabhängigen Normalenvektoren ist J~ gemäß (2.1) eindeutig bestimmt. Eine Sromdichte J~ 6= ~0 kann nur in einem Material vorliegen, in dem
Ladungen beweglich sind (Leiter). Die Materialgleichung lautet allgemein
~ E),
~
J~ = J(
~ vereinfacht.
welche sich im linearen, isotropen Fall zum Ohmschen Gesetz J~ = κE
Ladungserhaltung Bevor wir die Grundgleichungen der Theorie stationärer Strömungsfelder definieren, überlegen wir, wie sich freie Ladungen Q in leitfähigen Material verhalten. Wir betrachten ein Volumen V mit Raumladungsdichte % und Gesamtladung
Q. Ladungserhaltung ist ein grundlegendes physikalisches Prinzip und bedeutet, dass
der Strom über die Oberfläche des Volumens gleich der zeitlichen Änderung der Gesamtladung ist:
I(∂V ) +
d
Q(V ) = 0.
dt
(2.2)
Dies ist gleichbedeutend mit
{
A=∂V
y
~+ d
J~ · dA
% dV
dt
= 0.
V
Mit dem Gaußschen Ingtegralsatz folgt
y
∂%
~
div J +
dV = 0.
∂t
V
50
(2.3)
Da V beliebig wählbar ist, ergibt sich nun
div J~ +
∂%
= 0.
∂t
(2.4)
Die Gleichungen (2.2) bis (2.4) heißen Kontinuitätsgleichung (in globaler Form, in
Integralform bzw. in differentieller Form).
Definition 2.1
Es gibt Ströme, bei denen ∂%
= 0 gilt. Dann ist div J~ = 0. Solche Stromdichtefelder
∂t
heißen stationäre Strömungsfelder.
Die Theorie der stationären Strömungsfelder basiert auf den Gleichungn der Elektrostatik
~ = %
div D
~ = ~0
rot E
~ = D
~
εE
und der zusätzlichen Materialannahme
~
J~ = κE
div J~ = 0.
mit
~ J~ oder ϕ
Gibt es Komponenten in einem Modell, die feste Ausgangsgrößen für E,
(letzteres im Sinne von Randwerten)1 liefern, ohne von anderen Teilen des Modells
beeinflusst zu werden, spricht man von eingeprägten Größen. Zum Beispiel kann die
~ + J~0 um eine eingeprägte Stromdichte J~0 erweitert werden.
Materialgleichung J~ = κE
Batterien werden oft über eingeprägte Spannungen (Randwerte für ϕ) modelliert. Außer durch Ladungen können elektrische Felder im Rahmen dieses Modells auch durch
eingeprägte stationäre Ströme erzeugt werden.
Bemerkung
1. Die Kontinuitätsgleichung folgt auch aus dem Durchflutungssatz
~ = J~ +
rot H
∂ ~
D.
∂t
In der Tat gilt
~ = div J~ + div
0 = div rot H
∂ ~
D
∂t
∂
~ = div J~ + ∂% .
= div J~ +
div D
∂t
∂t
2. Das von einem stationären Strom erzeugte stationäre Magnetfeld ist vom elektrischen Feld entkoppelt.
1
Wir werden sehen, dass in der Theorie statioärer Strömungsfelder stets ein elektrisches Skalarpotential existiert.
51
Wir untersuchen noch, wie realistisch die Annahme ∂%
= 0 ist und führen dazu folgen∂t
des Gedankenexperiment durch: Wir bringen Ladungen auf zwei Elektroden in einem
leitfähigen Medium (ε und κ > 0 seien räumlich und zeitlich konstant). Die Ladungen
fließen dann ab gemäß
~ r, t) +
0 = div J(~
∂%(~r, t)
∂t
⇐⇒
κ
~ + ∂ %(~r, t)
div D
ε
∂t
ε ∂
0 = %(~r, t) +
%(~r, t).
κ ∂t
⇐⇒
0=
Die letzte Zeile ist eine gewöhnliche Differentialgleichung für die zum Zeitpunkt t vorhandene Ladungsmenge. Ihre Lösungen lauten, falls die vorhandene Ladungsdichte
%(~r, t0 ) zum Zeitpunkt t0 gegeben ist,
%(~r, t) = %(~r, t0 )e−
t−t0
τr
.
Hierbei ist τr := κε die Abklingzeit der Raumladungsdichte, gemessen in [s]. In der Zeit
τr fällt %(~r, t0 ) auf das 1e fache seines Ausgangswerts ab.
Beispiel
Für Silber bzw. Kupfer gilt
1
Ωm
bzw.
κCu = 5, 80 · 107
τr,Ag ≈ 1, 4 · 10−19 s
bzw.
τr,Cu = 2, 5 · 10−19 s.
κAg = 6, 17 · 107
1
.
Ωm
Damit folgt
Bei diesen Materialien fließen freie Ladungen offensichtlich so schnell ab, dass ∂%
=0
∂t
eine sinnvolle Annahme ist und die Theorie stationärer Strömungsfelder anwendbar ist.
Anders ist es bei schlechten Leitern: Für destilliertes Wasser erhalten wir τr ≈ 10−6 s
und für geschmolzenes Quarz τr ≈ 106 s ≈ 10 Tage.
Folgerung 2.2
Die Bedingungen eines stationären Srömungsfeldes lassen sich nur durch ständiges
Nachpumpen“ von Ladungen realisieren.
”
~ = 0 folgt die Existenz eines elektrischen Skalarpotentials ϕ.
Potential Aus rot E
Dieses erfüllt die partielle Differentialgleichung
~ r)) = div(κ(~r)E(~r)) = − div(κ(~r) grad ϕ(~r)).
0 = div(J(~
Liegt ein homogenes Material vor, so ist κ konstant und wir erhalten die LaplaceGleichung
∆ϕ = 0
52
zur Bestimmung des elektrischen Skalarpotentials. Zum Lösen der Laplace-Gleichung
gelten hier die gleichen formalen Methoden wie in der Elektrostatik. Aus ϕ können
~ und J~ gemäß E
~ = − grad ϕ und J~ = −κ grad ϕ bestimmt werden.
dann E
Randbedingungen Für die eindeutige Lösbarkeit der Laplacegleichung sind Randbe~ und J~ an Grenzflächen verhalten.
dingungen erforderlich. Wir leiten nun her, wie sich E
An der Grenzfläche zwischen zwei Gebieten mit κ1 bzw. κ2 gebe es keinen Strombelag.
Für ein sehr dünnes Testvolumen V , das um einen Teil der Grenzschicht gelegt wird,
gilt.
{
{
~=
J~ · dA
(J2,n − J1,n )dA = 0,
∂V
∂V
wobei J2,n die Komponente der Stromdichte im Material 2 normal zur Grenfläche ist
und J1,n die Normalkomponente der Stromdichte im Material 1. Hieraus folgt die Stetigkeit der Normalenkomponente an der Grenzschicht.
Die Stetigkeit der Tangentialkomponente des E-Fedes ergibt
E2,t = E1,t =
J2,t
J1,t
=
,
κ1
κ2
wobei E1,t und E2,t die Tangentialkomponente der elektrischen Feldstärke im Bereich
des Materials 1 bzw. Materials 2 sind, und J1,t , J2,t die Tangentialkomponenten der
Stromdichten sind.
Stromlinien werden demnach gebrochen: Mit
tan αk =
Jk,t
,
Jk,n
k = 1, 2,
folgt
J1,t J2,t
κ1 E1,z
κ1
tan α1
=
=
= ,
tan α2
J1,n J2,n
κ2 E2z
κ2
und somit
tan α1
κ1
= .
tan α2
κ2
Dies ist das Berechnungsgesetz der Strömungsfeldlinien.
Spezialfälle:
1. Gilt κ2 = 0 (Isolator), so folgt J2,n = 0 auf ∂Ω, das heißst der Strom dringt nicht
in den Isolator. Hierbei ist α1 = 90◦ . Weiterhin ist κE1,n = J1,n = 0 und
~ 1 = ~n · grad ϕ = ∂ϕ
0 = −E1,n = −~n · E
∂n
auf ∂Ω, das heißt ϕ erfüllt die Laplacegleichung im Gebiet 1 (Leiter) mit NeumannRandbedingungen auf der Grenfläche S zum Isolator.
53
~
2. Ist κ2 −→ ∞ (perfekter Leiter), so ist tan α1 = 0. Alle Strömungslinien bzw. ELinien enden senkrecht auf der Grenzfläche. Also ist ϕ auf der Fläche konstant.
Die Grenzschicht ist Äquipotentialfläche. Somit erfüllt ϕ die Laplacegleichung
mit Dirichlet-Randbedingungen (z.B. ϕ(~r) = 0 für ~r ∈ S an einer geerdeten
Randfläche) im Gebiet 1.
Bemerkung
Die Grenzbedingungen für stationäre Strömungsfelder implizieren, dass sich an der
Grenzfläche unterschiedlich gut leitender Materialen Ladungsbelegungen ausbilden. Es
gilt
ε1
ε2
σ = D2,n − D1,n = ε2 E2,n − ε1 E1,n = Jn
−
= Jn (τr,2 − τr,1 )
κ2 κ1
mit den dielektrische Relaxationskonstanten τr,1 und τr,2 und Jn = J1,n = J2,n .
Folgerung 2.3
Bei unterschiedlichen Relaxationszeiten bildet sich ein stationärer Zustand erst aus,
wenn die entsprechende Flächenladung aufgebaut ist. Erst dann gilt das Brechnungsgesetz.
Praktische Beispiele stationärer Strömungsfelder 1l Ohmscher Widerstand: Wegen der Existenz eines elektrische Skalarpotentials kann die Spannung UB zwischen
zwei Elektroden über eine beliebige verbindende Kurve C berechnet werden:
ˆ
ˆ
~
UB = E · d~r = − (grad ϕ) · d~r = ϕ(~r2 ) − ϕ(~r1 ).
C
C
Der zugehörige Gesamtstrom beträgt
Iges = I(S) =
x
S
~
J~ · dA.
Hierbei ist S eine die Elektroden trennende Fläche, die vom Gesamtstrom durchflossen
wird.
Die Erfahrung lehrt uns, dass
UB
R :=
Iges
konstant ist. Also ist
´
´
S
S
J~ · d~r
´
~ · d~r
E
1
1
C
C
C
= s
= s
.
R= s
~
~
~
~
~ · dA
~
κ
κ
J · dA
J · dA
E
~ · d~r
E
S
Beispiel
Wir betrachten einen Draht mit Querschnitt A der Länge ` der in ~ex -Richtung verläuft.
54
~ = E~ex und
Es gilt E
ˆ
~ · d~r = E`
E
C
bzw.
x
S
~ · dA
~ = E · A.
E
1`
. Hier wird zweckmäßigerweise eine Querschnittsfläche zum Trennen
Somit ist R =
κA
der Elektroden“ (hier: Drahtenden) verwendet.
”
Bemerkung
Für eine einzelne Elektrode (die andere liegt in ∞) gilt
´
~ · d~r
E
1 C
R =
s
~ · dA
~
κ E
(2.5)
S
und
v
C = ε S´
C
~ · dA
~
E
Q
=ε .
~ · d~r
U
E
(2.6)
Ein Vergleiche von (2.5) und (2.6) ergibt
1
C
=
,
ε
κR
das heißt RC =
ε
ist wieder die Relaxationszseit.
κ
2l Die Kirchhoffschen Knotenregel: Anwendung der Kontinuitätsgleichung auf einen
Knoten in einem Netzwerk, von dem n Linienströme In ausgehen liefert
I=
{
∂V
~=
J~ · dA
n
X
Ik = 0,
k=1
das heißt die Kirchhoffsche Knotenregel folgt aus der Kontinuitätsgleichung.
~ = ~0 folgt
Wegen rot E
˛
~ · d~r =
E
0=
∂A
n ˆ
X
k=1 C
k
~ · d~r =
E
n
X
Uk
k=1
für jede Masche aus n Leitungen im Netzwerk. Dies ist die Maschenregel, die somit
eine Folgerung der Existenz eines Potentials ist.
55
2.1 Einfache Geometrien
1lPunktförmige Elektrode.
a) Wir betrachten eine Elektrode, die ohne Beschränkung der Allgemeinheit ihren
Mittelpunkt im Ursprung besitzt. Aufgrund der Symmetrie gilt hierbei
~ r) = J(r)~er .
J(~
Es bezeichne Kr die Kugel vom Radius r um den Ursprung. Dann gilt
x
x
~ r ) · dA
~ = J(r)
dA = 4πr2 J(r).
I0 = I(∂Kr ) =
J(~
∂Kr
∂Kr
Somit folgt
I0
~er ,
4πr2
I0
~ r) =
~er
und
E(~
4πκr2
I0 1
ϕ(~r) =
.
4πκ r
b) Punktförmige Elektrode vor ideal leitfähiger Wand: Die Wand verlaufe in der yzEbene, der Quellpunkt liege bei ~r0 . Die sich an der Wand einstellende Dirichletsche
Randbedingung (ϕ = const) kann durch Spiegelung des Potentials konstruiert werden:
~ r) =
J(~
Schließlich folgt
ϕ(~r) = ϕ1 (~r) + ϕ∗1 (~r)
I0
−I0
=
+
4πκ|~r − ~r0 | 4πκ|~r + ~r0 |
I0
1
1
=
−
,
4πκ |~r − ~r0 | |~r + ~r0 |
0
0
~
r
−
~
r
~
r
+
~
r
I
0
~ r) =
−
E(~
.
4πκ |~r − ~r0 |3 |~r + ~r0 |3
~ r) = κE(~
~ r).
J(~
c) Punktförmige Elektrode vor isolierender Wand: Auch Neumannsche Randbedingungen können durch Spiegelung konstruiert werden. Allerdings ist – anders bei der
Konstruktion Dirichletscher Randbedingungen – das Vorzeichen der Ladung nicht zu
ändern. Die Spiegelladung hat nun das gleiche Vorzeichen, wie die Ausgangsladung.
Im Falle einer Ebene gilt I0∗ = I0 . Es folgt
I0
I0
+
,
0
4πκ|~r − ~r | 4πκ|~r + ~r0 |
I0
|~r − ~r0 |
~r + ~r0
~
+
E(~r) =
4πκ |~r − ~r0 |3 |~r + ~r0 |3
ϕ(~r) =
und
~ r) = κE(~
~ r).
J(~
56
Bemerkung 1. Zur Realisierung Neumannscher Randbedingungen ist das Spiegelungsprinzip mit einer gleichartigen Ladung durchzuführen (I > 0 =⇒ I ∗ > 0,
I < 0 =⇒ I ∗ < 0), während Dirichlet-Bedingungen mit einer entgegengesetzten
Ladung realisiert werden (I > 0 =⇒ I ∗ < 0, I < 0 =⇒ I ∗ > 0).
2. Zur Spiegelung der Ströme an Kugeln wird die Kelvin-Transformation eingesetzt.
2lUnendlich lange linienförmige Elektrode.
a) Ohne Einschränkung verlaufe die Elektrode in ~ez -Richtung durch den Ursprung. In
ihr fließt der Strom I` pro Längeneinheit. Aufgrund der Symmetrie folgt
~ r) = J(%)~e% .
J(~
Es sei Z`,R ein Zylinder der Höhe ` mit Radius R. Dann gilt
x
x
~ r) · dA
~=
~
I =
J(~
J(%)~e% · dA
∂Z`,R
= J(%)
x
Zylindermantel
dA = J(%)2π%`.
Zylindermantel
Also ist
I
und
2π%`
I
~ r) =
J(~
~e% .
2π%`
J(%) =
Weiterhin folgt
I
~e%
und
2π%`κ
I
I
I
%
ϕ(~r) =
ln(%) −
ln(%B ) =
ln
.
2π`κ
2π`κ
2π`κ
%B
~ r) =
E(~
Hierbei ist %B ein willkürlich gewählter Bezugsradius.
b) Vor ideal leitender Wand: Die Wand liege in der yz-Ebene, der Strom verläuft
parallel zur z-Achse durch den Punkt (x0 , y0 ). Nun gilt
ϕ(~r) = ϕ1 (~r) + ϕ∗1 (~r)
p
p
I
I
ln (x − x0 )2 + (y − y0 )2 −
ln (x + x0 )2 + (y + y0 )2
=
2π`κ
2π`κ
2
2
I
(x − x0 ) + (y − y0 )
=
ln
.
4π`κ (x + x0 )2 + (y + y0 )2
c) Vor isolierender Wand:
ϕ(~r) =
I ln((x − x0 )2 + (y − y0 )2 ) + ln((x + x20 )2 + (y + y0 )2 ) .
4π`κ
57
2.2 Leistung im stationären Strömungsfeld
Es ist W = U Q und
dW
dU
dQ
=
= U I.
Q+U
dt
dt
dt
|{z}
=0
Wir betrachten ein Volumen V , zwei Punkte ~r1 , ~r2 ∈ V und eine Fläche S, die ~r1 und
~r2 so in V trennt, dass I(S) der gesamte Strom ist. C~r1 ,~r2 sei die Kurve, die ~r1 und ~r2
in V verbindet. Wählen wir speziell S als Potentialfläche (das heißt ϕ ist konstant auf
~ = J~ · ~n auf S) und C~r1 ,~r2 als Feldlinie (das heißt ~r zeigt stets in Richtung
S und |J|
~ und es gilt E(~
~ r) · ~t = |E|)
~ so gilt
von E
! ˆ
ˆ
x
~ · d~r =
~ r ) · dA
~
~ r) · d~r
−I(ϕ(~r2 ) − ϕ(~r1 )) = −I
grad E
J(~
E(~
=
x
S
=
C~r1 ,~r2
~ r) · ~n dA
J(~
| {z }
C~r1 ,~r2
~
=|J|
x ˆ
S
ˆ
C~r1 ,~r2
~ r) · ~t dr
E(~
| {z }
~
=|E|
~·E
~ dr dA =
J
| {z
}
y
S C
~ ~
~
r1 ,~
r2 =|J| |E|
V
~ dV.
J~ · E
Hierbei ist ~n ein Normalenvektor an S und ~t ein Tangentialvektor von C~r1 ,~r2 .
~ die Leistungsdichte des stationären Strömungsfeldes.
Somit ist J~ · E
~
Magnetfeld stationärere Ströme (entkoppelt von E)
Nach dem Durchflutungsgesetz gilt
~
~ = J~ + ∂ D .
rot H
∂t
(2.7)
~
Hierbei ist ∂∂tD = ~0, da das gegebebene Strömungsfeld als stationär angenommen wird.
Es gilt also
~ ist ein Vektorpotential von J.
~
1. H
~ noch nicht bestimmt, denn ist Ψ irgendein
2. Durch das Durchflutungsgesetz ist H
(glattes) Feld, so gilt für
~2 = H
~ + grad Ψ
H
ebenfalls die Gleichung
~ 2 = rot H
~ + rot grad H
~ = J.
~
rot H
| {z }
=0
Zusätzlich wird
~ = 0 und
a) der Satz vom magnetischen Hüllenfluss div B
58
~ = B(
~ H)
~ benötigt.
b) eine Materialgleichung B
Einfache Fälle für Materialgleichungen sind
~ = µ0 H
~ (hierbei ist µ0 eine magnetische Feldkonstante)
1. Vakuum: B
2. lineare isotrope Materialien
~ = µ0 µr H.
~
B
Hierbei ist µr die relative Permeabilität.
In einem homogenen isotropen linearen Material kann also das Problem (2.7) wie folgt
umgeschrieben werden:
~ = 0 und rot B
~ = µJ.
~ Da B
~ Divergenz-frei ist, existiert ein
Suche ein Feld mit div B
~ mit rot A
~ = B.
~ Für A
~ gilt div rot A
~ =0
Vektorpotential, das heißt ein Vektorfeld A
und
~ = rot rot A
~ = µJ.
~
~ − div grad A
grad div A
| {z }
=∆
~ nicht eindeutig bestimmt ist. Um eine EindeuEin Problem besteht nun darin, dass A
tigkeit zu erzwingen führen wir eine Eichung ein. Üblich sind
~ = 0 (Coulomb-Eichung)
1. div A
~ + µε ∂ϕ = 0 (Lorentz-Eichung)
2. div A
∂t
Wir wählen die Coulomb-Eichung (die Lorentz-Eichung ist bei dynamischen Problemen
interessant). Dann folgt
~ = −µJ.
~
∆A
(2.8)
Der Operator ∆ ist hier der Vektor-Laplace-Operator. In kartesischen Koordinaten ist
(3.4) gleichwertig zu
∆Ax (~r) = −µJx
∆Ay (~r) = −µJy
∆Az (~r) = −µJz ,
(2.9)
(2.10)
(2.11)
wobei für den skalaren Laplace-Operator nach wie vor
∆=
∂2
∂2
∂2
+
+
∂x2 ∂y 2 ∂z 2
gilt. Der Luxus der Entkoppelung der kartesischen Koordinaten, wie er in den Gleichungen (3.5) bis (3.7) deutlich wird, tritt bei Wahl anderer Koordinatensystemen nicht
auf.
59
In Zylinderkoordinaten gilt beispielsweise
2 ∂Aϕ A%
− 2 = −µJr
%2 ∂ϕ
%
2 ∂A% Aϕ
∆Aϕ + 2
− 2 = −µJϕ
% ∂ϕ
%
∆Az = −µJz ,
∆A% −
wobei ∆ hier der skalare Laplace-Operator ist, dessen Form in Zylinderkoordinaten
bereits bekannt ist.
Wir werden uns im folgenden Kapitel Magnetostatik“ im Wesentlichen mit der Frage
”
beschäftigen, wie die hier aufgestellten Differentialgleichungen für das Vektorpoten~ = rot A
~ kann anschließend die
tial gelöst werden können. Durch Berechnung von B
magnetische Flussdichte bestimmt werden.
60
3
Magnetostatik
Bei stationären Problemen sind elektrische und magnetische Felder entkoppelt. In der
Magnetostatik betrachten wir Magnetfelder, die durch stationärer Ströme erzeugt werden. Dabei r können diese Ströme eingeprägt werden, zuvor durch Berechnung eines stationären Strömungsfeldes bestimmt werden, oder von atomaren Kreisströmen
herrühren, die wir im Modell als eine räumlich verteilte Magnetisierung berücksichtigen.
3.1 Grundgleichungen der Magnetostatik
Das Durchflutungsgesetz lautet unter Vernachlässigung von Verschiebungsströmen
die von einem zeitlich veränderlichen dielektrischen Verschiebungsfeld herrühren,
~ = J.
~
rot H
~
∂D
,
∂t
(3.1)
Der Satz von magnetischen Hüllfluss lautet
~ = 0.
div B
(3.2)
Darüber hinaus benötigen wir die Materialgleichung
~ = B(
~ H).
~
B
Einfacher Fall der Materialgleichungen Im Vakuum gilt
~ = µ0 H
~
B
(3.3)
mit der magnetischen Feldkonstanten µ0 . In isotropen Medien gilt
~ = µr µ0 H
~ = µH
~
B
mit der Permeabilität µ und der relativen Permeabilität µr .
Die Übergangsbedingungen an einer ebenen Grenzschicht mit Normalenvektor ~nG zwischen zwei Gebieten 1 und 2 mit Permeabilität µ1 bzw. µ2 lauten:
~2 − H
~ 1 ) × ~nG = ~k,
(H
~
wobei ~k ein Flächenstrom ist (falls ~k = ~0 ist also die Tangentialkomponente von H
stetig) und
~2 − B
~ 1 ) · ~nG = 0
(B
61
~ Hieraus folgt das Brechnungsgesetz
(Stetigkeit der Normalkomponente von B).
µ1
tan α1
= ,
tan α2
µ2
~
wobei α1 bzw. α2 jeweils die Winkel der B-Vektoren
zum Lot im Gebiet 1 bzw. 2 sind.
Statt der differentiallen Form (3.1), (3.2) und dem zusätzlich erforderlichen Übergangsbedingungen kann die integrale Form des Durchflutungssatzes
˛
x
~ · d~r =
~
H
J~ · dA
A
∂A
bzw. des Satzes vom magnetischen Hüllenflusses
ˆ
~ · dA
~=0
B
verwendet werden.
3.2 Bestimmung des magnetischen Feldes eines
stationären Strömungsfeldes J~
1. Methode: Anwendung des Durchflutungssatzes. Wir betrachten einen runden Leiter
der unendlich lang ist und in Richtung der z-Achse ausgerichtet ist. Der Radius sei R.
~ r) = J(%)~ez . Außerhalb des
Die Strömungsdichte ist radialsymmetrisch, es gilt also J(~
Leiters (für % > R) gilt J(%) = 0.
~
~ r) = Hϕ (%)~eϕ . Nach
Wir bestimmen nun das H-Feld.
Wegen der Symmetrie folgt H(~
dem Durchflutungssatz folgt für % > 0 und eine positiv orientierte Kreislinie C% um die
z-Achse mit Radius %
˛
˛
x
~
~
d~r = Hϕ (%)dr = 2π%Hϕ (%) =
J~ · dA.
H(~r) · |{z}
| {z }
C% Hϕ~eϕ
=~eϕ dr
Somit ist
Kreis mit Radius %
C%
ˆ2π ˆ%
2π%Hϕ (%) =
ˆ%
J(τ )τ dτ dϕ = 2π
0
0
J(τ )τ dτ = I(K% )
0
und somit
Hϕ (%) =
I(K% )
,
2π%
wobei I(K% ) der Gesamtstrom durch einen Kreis K% mir Radius % um die z-Achse ist,
der für % < R von der Verteilung J(%) abhängt.
ges
Außerhalb des Leiters (% ≥ R) gilt Hϕ (%) = I2π%
∼ %1 .
2. Methode: Vektorpotential.
In einem homogenen isotropen linearen Material kann das Problem der Bestimmung des
Magnetfeldes einer vorgegebenen Stromdichteverteilung J~ wie folgt formuliert werden:
62
~ = 0 und rot B
~ = µJ.
~ Da B
~ Divergenz-frei ist, existiert ein
Suche ein Feld mit div B
~ mit rot A
~ = B.
~ Für A
~ gilt div rot A
~ =0
Vektorpotential, das heißt ein Vektorfeld A
und
~ = rot rot A
~ = µJ.
~
~ − div grad A
grad div A
| {z }
=∆
~ nicht eindeutig bestimmt ist. Um eine EindeuEin Problem besteht nun darin, dass A
tigkeit zu erzwingen führen wir eine Eichung ein. Üblich sind
~ = 0 (Coulomb-Eichung)
1. div A
~ + µε ∂ϕ = 0 (Lorentz-Eichung)
2. div A
∂t
Wir wählen die Coulomb-Eichung (die Lorentz-Eichung ist bei dynamischen Problemen
interessant). Dann folgt
~ = −µJ.
~
∆A
(3.4)
Der Operator ∆ ist hier der Vektor-Laplace-Operator. In kartesischen Koordinaten ist
(3.4) gleichwertig zu
∆Ax (~r) = −µJx
(3.5)
∆Az (~r) = −µJz ,
(3.7)
∆Ay (~r) = −µJy
(3.6)
wobei für den skalaren Laplace-Operator nach wie vor
∆=
∂2
∂2
∂2
+
+
∂x2 ∂y 2 ∂z 2
gilt. Der Luxus der Entkoppelung der kartesischen Koordinaten, wie er in den Gleichungen (3.5) bis (3.7) deutlich wird, tritt bei Wahl anderer Koordinatensystemen nicht
auf.
In Zylinderkoordinaten gilt beispielsweise
2 ∂Aϕ A%
− 2 = −µJr
%2 ∂ϕ
%
2 ∂A% Aϕ
∆Aϕ + 2
− 2 = −µJϕ
% ∂ϕ
%
∆Az = −µJz ,
∆A% −
wobei ∆ hier der skalare Laplace-Operator ist, dessen Form in Zylinderkoordinaten
bereits bekannt ist.
Wir werden uns im folgenden Kapitel Magnetostatik“ im Wesentlichen mit der Frage
”
beschäftigen, wie die hier aufgestellten Differentialgleichungen für das Vektorpoten~ = rot A
~ kann anschließend die
tial gelöst werden können. Durch Berechnung von B
magnetische Flussdichte bestimmt werden.
63
Wir verwenden im folgenden kartesische Koordinaten. Die Gleichungen (3.5) bis (3.7)
sind – jeweils für sich betrachtet – formal identisch zu der Potentialgleichung der Elektrostatik. Daher können sie – wie gehabt – durch Superposition Greenscher Funktionen
dargestellt werden. Für das Außenraumpotential gilt
µ y Jx (~r0 )
dV 0 ,
Ax (~r) =
0
4π
|~r − ~r |
V
µ y Jy (~r0 )
Ay (~r) =
dV 0 ,
4π
|~r − ~r0 |
V
y
Jz (~r0 )
µ
dV 0 ,
Az (~r) =
4π
|~r − ~r0 |
V
oder in Vektorschreibweise (in kartesischen Koordinaten)
y J(~
~ r0 )
~ r) = µ
A(~
dV 0 .
4π
|~r − ~r0 |
(3.8)
V
Die Gleichungen (3.5) bis (3.7) gelten unter Annahme einer Coulomb-Eichung. Daher
~ in der Tat quellfrei ist. Wähle
testen wir nun, ob das über Gleichung (3.8) bestimmte A
V so, dass kein Strom über ∂V fließt. Dann gilt unter Ausnutzung der Rechenregeln
für Divergenzenbildung von Produkten
y
~ r0 )
1
µ y
J(~
0
~ r) = µ
~ r0 ) gradr0
0
div A(~
J(~
dV
=
div
dV 0
r
4π
|~r − ~r0 |
4π
|~r − ~r0 |
V
V
~ r0 )
µ { J(~
dA0 = 0,
= −
4π
|~r − ~r0 |
∂V
wenn V hinreichend groß gewählt wird. Aus (3.8) kann durch Berechnung der Rotation
~ bestimmt werden:
B
"
#
y J(~
~ r0 )
~ r0 )
µ
µ y
J(~
0
~ = rot A
~ = rotr
B
dV
=
rot
dV 0
r
4π
|~r − ~r0 |
4π
|~r − ~r0 |
V
V
mit
rotr
~ r0 )
1
J(~
1
~ r0 ) −J(~
~ r0 ) × gradr
=
rotr J(~
0
0
|~r − ~r |
|~r − ~r | | {z }
|~r − ~r0 |
=0
0
~r − ~r0
0
~ r0 ) × ~r − ~r .
~
= −J(~r ) × −
=
J(~
|~r − ~r0 |3
|~r − ~r0 |3
Es folgt das Biot-Savart-Gesetz :
Satz 3.1
~ mit div A
~ = 0 einer stationären StromdichteverteiDas magnetische Vektorpotential A
~ r) ist gegeben durch (3.8).
lung mit Stromdichte J(~
Die zugehörigen Flussdichte lautet
y J(~
~ r0 ) × (~r − ~r0 )
~ r) = µ
dV 0 .
(3.9)
B(~
4π
|~r − ~r0 |3
V
64
3.3 Magnetische Felder von Linienströmen
Für dünne Leiter gilt näherungsweise
~ r0 )dV 0 = (J(~
~ r0 ) · |A| · ~nA )d~r0 = Id~r0 ,
J(~
wobei A die Querschnittsfläche mit Inhalt |A| und ~nA ein Normaleneinheitsvektor an
A ist, parallel zum Tangentialvektor ~r˙ an den Leiter.
Damit folgt
Satz 3.2
Gegeben sei ein dünner Leiter, der vom Strom I durchflossen wird. Dann gilt
˛
~ r) = µI
A(~
4π
Leiter
und
~ r) = − µI
B(~
4π
˛
Leiter
dr0
|~r − ~r0 |
(~r − ~r0 ) × d~r0
.
|~r − ~r0 |3
Als Beispiel berechnen wir zunächst das magnetische Feld einer Leiterschleife um die
z-Achse:
Das Feld einer Leiterschleife parallel zur xy-Ebene mit Mittelpunkt (0, 0, ζ)> und Radius R beträgt gemäß dem Satz von Biot-Sarvat für dünne Leiter auf der z-Achse
~ 0, z) = Bz~ez ,
B(0,
(3.10)
−R cos ϕ
−R sin ϕ
−R sin ϕ × R cos ϕ
ˆ2π
z−ζ
0
µI
µIR2
Bz (0, 0, z) = −
dϕ =
3 .
0
4π
2(R2 + (z − ζ)2 ) 2
R cos ϕ 0
0 − R sin ϕ
z
ζ
Wir wenden dies nun an, um die Felder eng gewickelter Spulen zu bestimmen.
Beispiel
Eine Spule mit Achse parallel zur ~ez -Richtung habe N Windungen an den äquidistanten
−2
−1
~
Positionen 0, N1−1 `, N2−1 `, ..., N
`, N
`. Superposition der B-Felder
der einzelnen WinN −1
N −1
65
dungen ergibt
Bz (0, 0, z)
=
N
−1
X
i=0
=
=
`
N
≈dζ
≈
=
µIR2
2(R2 + (z −
N −1
µIR2 X
1
2
2 i=0 [R + (z −
=
=
3
i
`)2 ] 2
N −1
N −1
R
µIR2 N X
N
2
2`
i=0 [R + (z −
µIR2 N
2`
µIR2 N
2`
ˆ`
µIR2 N
2`
3
i
`)2 ] 2
N −1
dζ
3
[R2 + (z − ζ)2 ] 2
0
ˆz−`
z
=
3
i
`)2 ) 2
N −1
−du
3
[R2 + u2 ] 2
ˆz
du
3
+ u2 ] 2
z−`
z
µIR2 N
u
√
2
2
2
2` R R + z z−`
µIR2 N
2`
[R2
z−`
z
√
−p
2
2
R +z
R2 + (z − `)2
1. Fall: Mitte der Spule.
2`
`
µIN
q 2
Bz 0, 0,
=
2
2`
R2 +
`2
4
µIN
=p
(2R)2 + `2
Bei einer langen dünnen Spule gilt somit
`
µIN
Bz 0, 0,
≈
.
2
`
2. Fall: Am Ende der Spule (z = 0).
Bz (0, 0, 0) =
µIN
`
µIN
1
√
√
=
.
2`
2
R2 + `2
R2 + `2
Wir erhalten also
Bz (0, 0, 0) ≈
66
µIN
.
2`
!
.
3.4 Magnetische Dipole
~
Der ideale magnetische Dipol Das B-Feld
eines Kreissstroms I in der xz-Ebene mit
Radius % um den Ursprung ist laut (3.10) gegeben durch
0
0
%2
1
µI
2 1
~
B(0, 0, z) =
0 = µIπ%
0
2 (%2 + z 2 )3/2
2π (%2 + z 2 )3/2
1
1
0
1
1
2
=
2µIπ% 0 .
4π (%2 + z 2 )3/2
1
Diese Beziehung kann mit der folgenden Definition umgeschrieben werden.
Definition 3.3
Das magnetische Dipolmoment einer Leiterschleife ist definiert durch
m
~ = µI~a.
Hierbei ist ~a = |A|~nA ein Vektor in Richtung einer Normalen ~nA an die Fläche A mit
Inhalt |A|, die von der Leiterschleife aufgespannt wird.
Es gilt also
1
~ 0, z) = 1
2m.
~
B(0,
2
4π (% + z 2 )3/2
Speziell folgt für % −→ 0
~ 0, z) = 1 1 m.
B(0,
~
2π z 3
~ einer Leiterschleife in der xy-Ebene
Für das (das Coulomb-geeichte) Vektorpotential A
mit Radius % um den Ursprung gilt gemäß (3.8)
~ r) = A(x,
~ y, z) = Iµ
A(~
4π
ˆ
K%
1
d~r0
0
|~r − ~r |
Iµ
=
4π
ˆ2π
0
=
−% sin t
% cos t
0
p
dt
(x − % cos t)2 + (y − sin t)2 + z 2
Iπ%2 µ 1 1
2π 2π %
ˆ2π
0
− sin t
1
p
cos t dt.
x2 + y 2 + z 2 + %2 − 2x% cos t − 2y% sin t
0
67
Lassen wir nun % −→ 0 streben, so folgt mit der Regel von de l’Hôspital
1
~ r) = |m|
A(~
~
lim
4π 2 %→0
=
=
=
=
ˆ2π
1
− (x2 + y 2 + z 2 + %2 − (2x cos t + 2y sin t)%)−3/2 (3.11)
2
0
− sin t
·(2% − 2x cos t − 2y sin t) cos t dt
0
ˆ2π −x cos t sin t − z sin2 t
2
1
|m|
~
x cos2 tz cos t sin t dt
8π 2 (x2 + y 2 + z 2 )3/2
0
0
−y
1
1
π x
|m|
~
(x2 + y 2 + z 2 )3/2 4π 2
0
−y
1
|m|
~
x
4π (x2 + y 2 + z 2 )3/2
0
1 1
m
~ × ~r
(3.12)
4π r3
Eine Darstellung für (3.11) in Kugelkoordinaten für das Vektorpotential eines Punktdipols mit Dipolmoment m
~ ist gegeben durch
−y/r
− sin ϑ sin ϕ
1
1 |m|
1
1
~
1
(3.11) =
|m|
~ 2 x/r =
|m|
~ 2 sin ϑ~eϕ .
sin ϑ cos ϕ =
2
4π
r
4π r
4π
r
0
0
~
Das resultierende B-Feld
des Punktdipols ergibt sich in Kugelkoordinaten zu
2m cos ϑ
4π r3
m sin ϑ
=
4π r3
= 0.
Br =
Bϑ
Bϕ
Für einen magnetischen Punktdipol am Ort ~r0 gilt
~ × (~r − ~r0 )
1
m
~
m
~
1
~ r) = m
A(~
=
rot~r
=−
× grad~r
0
3
0
4π|~r − ~r |
4π
|~r − ~r |
4π
|~r − ~r0 |
und
~ · (~r − ~r0 )
~ r) = rot A(~
~ r) = − grad~r m
B(~
.
4π|~r − ~r0 |3
68
3.5 Magnetisierung
Die Ursache für die Magnetisierung von Materie sind atomare Kreisströme. Makroskopische Magnetisierung kann als Superposition mikroskopischer magnetischer Dipolfelder aufgefasst werden, die von diesen Kreisströmen herrühren.
Definition 3.4
~ ist die Volumendichte des magnetischen Moments
Die Magnetisierung M
~
~ = dm
.
M
dV
Das Vektorpotential eines Magnetisierungsfeldes ist gemäß (3.11) gegeben durch
~ r) =
A(~
~ (~r0 ) × (~r − ~r0 )
1 y M
1
1 y
0
grad~r0
dV 0
dV
=
0
3
4π
|~r − ~r |
4π
|~r − ~r0 |
V
V
y
~ (~r0 )
1
M
1 y
~ (~r0 )dV 0 − 1
0
0 M
rot
=
rot
dV 0
~
r
~
r
4π
|~r − ~r0 |
4π
|~r − ~r0 |
V
V
~ (~r0 ) × dA
~0
1 { M
1 y rot~r0 M (~r0 ) 0
dV
+
.
=
4π
|~r − ~r0 |
4π
|~r − ~r0 |
V
∂V
Definition 3.5
Die Größe
1
~ (~r)
J~mag (~r) = rot M
µ
wird Magnetisierungsstromdichte genannt. Die Größe
~kmag = 1 M
~ (~r) × ~n(~r)
µ
heißt Magnetisierungsstrombelag. Hierbei ist ~n der Einheitsnormalenvektor an ∂V .
~ konstant, so heben sich die inneren Ströme auf, und ein
Ist die Magnetisierung M
Strombelag auf ∂V resultiert, der die Ursache des äußeren Magnetfeldes ist.
Beispiel
Wir betrachten einen unendlich langen Kreiszylinder Z mit Achse parallel zur z Achse
~ (~r) = M~ez . Es gebe keinen Strom in Innern. Es gilt
mit homogener Magnetisierung M
~kmag = M ~eϕ
µ
=⇒
~|
|M
|~kϕ,mag | =
.
µ
Im Inneren des Zylinders gilt
Hz = kϕ,mag =
~|
|M
,
µ
~ |,
Bz = µHz = |M
69
wie wir gleich zeigen werden.
Außerhalb von Z gilt
˛
~ · d~r = I(A) = 0
H
∂A
~
für jede Fläche A und somit ist das H-Feld
außerhalb von Z gleich Null. Die Berech~
nung des H-Feldes in Z ist über das magnetische Skalarpotential Ψ (siehe Kapitel 3.7)
möglich, da das Innere von Z stromfrei ist. Für Ψ gilt in Z
∆Ψ = 0.
(3.13)
~i − H
~ a ) × ~n = ~k, das heißt H
~ i × ~n = ~k = M ~eϕ . Aus
mit der Randbedingung (H
µ
~ i = Hz~ez . Die Randbedingung kann also als Bedingung an
Symmetriegründen gilt H
Hz formuliert werden:
~ i × ~n = Hz~eϕ = M ~eϕ .
H
µ
Die Lösungen von (3.13) sind gegeben durch
Ψ(~r) = −
M
z + const,
µ0
und es folgt
~ r) = − grad Ψ(~r) = M ~ez .
H(~
µ
Wir erhalten also die gleiche Situation, wie bei einer langen Spule:
~ r) = M~ez .
B(~
3.6 Das magnetische Skalarpotential
~ = ~0. Somit gibt es ein
In Gebieten, in denen kein Strom vorliegt (J~ = ~0) gilt rot H
~ = − grad Ψ. Für Ψ folgt
magnetisches Skalarpotential Ψ mit H
~ = div(−µ grad Ψ) = −µ div grad Ψ = −µ∆Ψ
0 = div B
für homogene Medien mit konstanter Permeabilität µ. Das magnetische Skalarpotential
Ψ kann dann durch Lösung der Laplace-Gleichung mit gegebenen Randbedingungen
gewonnen werden.
Entsprechend kann das Feld eines magnetischen Dipols aus Ψ gewonnen werden. Analog
zum elektrischen Dipol folgt
m
~ · (~r − ~r0 )
Ψ(~r) =
4πµ|~r − ~r0 |3
~ = − grad Ψ. In Kugelkoordinaten ergibt sich
für einen Punktdipol am Ort ~r0 und H
Ψ(~r) =
70
m cos ϑ
4πµr2
wenn ~r0 = ~0 ist.
Bei homogener Magnetisierung eines Volumens V (keine Ströme im Innern) gilt für das
magnetischen Skalarpotential Ψ
~ (~r0 ) · (~r − ~r0 )
1 y M
1 y ~ 0
1
0
dV 0
dV
=
M (~r ) · grad~r0
0
3
4πµ
|~r − ~r |
4πµ
|~r − ~r0 |
V
V
!
y
y
0
~
~ (~r0 )
1
M (~r )
1
div M
0
=
div~r0
dV
−
dV 0
4πµ
|~r − ~r0 |
4πµ
|~r − ~r0 |
Ψ(~r) =
V
V
~ (~r)
1 { M (~r)
1 y div M
0
=
dV
−
dV 0 .
4πµ
|~r − ~r0 |
4πµ
|~r − ~r0 |
∂V
V
Diese Darstellung kann rein formal (unphysikalisch) wie folgt gedeutet werden:
~ (~r) ist eine magnetische Raumladungsdichte gegeben.
Durch %mag := − div M
~ (~r) · ~n(~r) ist ein magnetischer Ladungebelag (Flächenladungsdichte)
Durch σmag := M
gegeben.
Beispiel
~ = M~ez . Dann
Gegeben sei ein endlicher Zylinder mit konstanter Magnetisierung M
kann den Deck– und Bodenfläche die magnetische Flächenladung
(
M Deckenfläche
σmag (~r) =
−M Bodenfläche
zugeordnet werden.
3.7 Materie im äußeren magnetischen Feld
3.7.1 Diamagnetismus
folgt später
3.7.2 Paramagnetismus
folgt später
3.7.3 Ferromagnetismus
folgt später
3.7.4 Berechnung von B-H-Kurven
Wir betrachten eine lange dünne Spule, die auf einem Torus gewickelt ist.
71
Auf der Mittellinie des Torus (Radius r) gilt
Bϕ =
µ0 IN
,
2πr
~ = Bϕ~eϕ = B~eϕ .
B
1lWird die Spule zum Zeitpunkt t0 = 0 an eine Spannungsquelle mit konstanter Spannung angeschlossen, so fließt ein Strom I(t) in der Spule. Dieser erzeugt das Magnetfeld
I(t)N
~
~eϕ ,
H(t)
=
2πr
t ≥ t0 ,
auf der Mittellinie des Torus.
Bemerkung
Für den Grenzübergang t −→ ∞ ergibt sich
lim I(t) = I0 ,
t→∞
~
~ 0 = H0~eϕ ,
lim H(t)
=H
~
~ 0 = B0~eϕ .
lim B(t)
=B
t→∞
t→∞
~ kann nach dem Induktionsgestz bestimmt werden. Dazu wird eine Induktions2l B
schleife um die Spule gelegt. Für die Änderung des magnetischen Flusses Φ durch die
Schleifenfläche ASchleife gilt
−Φ̇(ASchleife ) = Uind (∂ASchleife ),
das heißt
x
∂
B · |ASchleife | = −
∂t
ASchleife
Somit ist
ˆt
B(t) =
0
∂
~ = Uind (t).
B(t) · dA
∂t
∂
1
B(τ ) dτ = −
∂t
|ASchleife |
ˆt
Uind (τ ) dτ.
0
Durch Messung von I(t) in der Spule und Uind (t) in der Induktionsschleife über die
Zeit t kann B(H) bzw. H(B) bestimmt werden.
3.8 Energie im magnetischen Feld
Der Versuchsaufbau aus Kapitel 3.7 kann verwendet werden, um die Energie des magnetischen Feldes zu bestimmen. Die in das System gesteckte Energie ist gegeben durch
ˆ∞
W =
ˆ∞
P (t) dt =
0
ˆ∞
I(t)U (t) dt
0
I(t)[−Uind (t) + UOhm (t)] dt = −
=
0
wobei N die Windungszahl der Spule ist.
72
ˆ∞
ˆ∞
I(t)N Uind (t) dt +
0
P (t) dt,
0
Weiterhin gilt
ˆ∞
ˆ∞
Wmag =
0
I(t)N Uind (t) dt = 2πr|ASchleife |
{z
}
|
=VSpule
H(t)
∂
B(t) dt
∂t
0
Also ist
B(∞)
ˆ
Wmag = VSpule
ˆB0
H(B) dB = VSpule
H(B) dB
0
B(0)
Allgemein gilt
Wmag (C)
Wmag
=
=
VSpule
VSpule
ˆ
~ B)
~ · dB.
~
H(
C
~
Hierbei handelt es sich um ein Kurvenintegral, wobei C = CB~ 1 ,B~ 2 eine Kurve im B~ 1 und B
~ 2 verbindet.
Raum ist, die B
Beispiel
~ = µH
~ mit H
~ unabhängig von µ. die Energie
Lineare isotropes Material: Hier gilt B
Wmag ist nun wegunabhängig, und es sgilt
Wmag
=
VSpule
ˆ
1~
~
B · dB
µ
~
[0,B]
1
=
µ
ˆB
β dβ =
1 2B
β |
2µ 0
0
1
1 ~ ~
1~ ~
1 ~ 2
|B|2 = |B|
|H| = B
· H = µ|H|
.
=
2µ
2
2
2
~ ·H
~ die Energiedichte des magnetischen Feldes.
Hierbei ist 12 B
~ · H.
~
Zum Vergleich: Die Energiedichte des elektrischen Feldes beträgt 21 D
3.9 Magnetische Kräfte
folgt später
73
3.10 Notation
Symbol
i
π
c
ε0
ε
εr
µ0
µ
µr
Bedeutung
imaginäre Einheit
Kreiszahl
(Vakuum-) Lichtgeschwindigkeit
= 8.854... · 10−12 As/Vm elektrische Feldkonstante
Permitivität
= εε0 relative Permitivität
= 4π · 10−7 Vs/Am Permeabilität
Permeabilität
= µµ0 relative Permeabilität
~r, ~r1 , ~r2 , ...
~r0 , ~r10 , ~r20 , ...
`
~n
A
V
v
t
F~
W
Q, Q1 , Q2
w
qL
σ
~
E
~
B
J~
~
D
Ortsvektoren (Aufpunkte)
Ortsvektoren (Quellpunkte)
(geometrische) Länge
Normalenvektor
Fläche
Volumen
Geschwindigkeit
Zeit
Kraft
Energie
Ladungen
Energiedichte
Linienladungsbelag
Ladungsbelag (Flächenladungsdichte)
elektrische Feldstärke (gemessen in V/m)
magnetische Flussdichte (gemessen in Wb/m2 bzw. V · s/m2 )
(elektrische) Stromdichte (gemessen in A/m2 )
dielektrische Verschiebung bzw. elektrische Flussdichte (gemessen in C/m2 bzw. A · s/m2 )
magnetische Feldstärke (gemessen in A/m)
(elektrische) Raumladungsdichte (gemessen in C/m3 bzw. A
· s/m3 )
Stromstärke
magnetische Spannung
elektrische Spannung
magnetischer Fluss
elektrischer Fluss
Strombeleg
~
H
%, %e
I
Vm
U
Φ
Ψ
α
~
74
Symbol
P~
~
M
κ
p~
R
m
~
f
λ
ω
k
Z
(x, y, z)
(ρ, ϕ, z)
(r, ϑ, ϕ)
ϕ, V
ψ
~
A
Bedeutung
Polarisationsfeld
Magnetisierungsfeld (Magnetisierung)
elektrische Leitfähigkeit
Dipolmoment
Ohmscher Widerstand
magnetisches Moment
Frequenz
Wellenlänge
Kreisfrequenz
Wellenzahl
Wellenwiderstand
kartesische Koordinaten
Zylinderkoordinaten
Kugelkoordinaten
elektrisches Skalarpotential
magnetisches Skalarpotential
magnetisches Vektorpotential
75