Vektoranalysis
Werbung

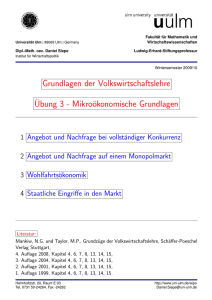
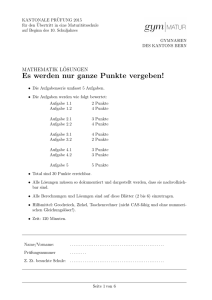
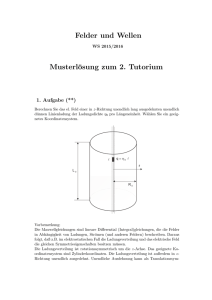
Kapitel 11 Vektoranalysis 11.1 Felder Skalare Felder Eine skalare Größe φ, die jedem Raumpunkt ~r = ~r(x, y, z) zugeordnet ist, heißt skalares Feld: φ = φ(~r) = φ(x, y, z). Wenn die Werte der Funktion φ nur von dem Abstand r von einem Zentrum abhängen, heißt φ(r) ein zentrales Feld. Wenn die Funktionswerte nur vom dem (senkrechten) Abstand ρ von einer Achse abhängen, heißt φ(ρ) axiales Feld. Die Punkte, für die die Funktion φ(~r) den festen Wert C annimmt, bilden eine Niveaufläche φ(~r) = C im Raum. Für zentrale bzw. axiale Felder sind die Niveauflächen Kugelflächen bzw. Zylinderflächen. Vektorfelder ~ die jedem Raumpunkt ~r = ~r(x, y, z) zugeordnet ist, heißt Vektorfeld: Eine vektorielle Größe A, ~ = A(~ ~ r ) = A(x, ~ A y, z). ~ läßt sich gemäß Das Vektorfeld A ~ = Ax (x, y, z) ~ux + Ay (x, y, z) ~uy + Az (x, y, z) ~uz A durch drei skalare Funktionen Ax , Ay und Az darstellen. Ein wichtiger Spezialfall ist das sphärische Vektorfeld, bei dem der Betrag nur von dem Abstand r von einem Zentrum abhängt und das die Richtung des Radiusvektors ~r hat; ein solches Feld kann also in der Form ~ = φ(r) ~r A geschrieben werden. 11.2 Gradient und Kurvenintegral Gradient Der Gradient eines skalaren Feldes φ ist in kartesischen Koordinaten definiert (s. a. Kapitel 7) als der Vektor ∂φ ∂φ ∂φ ∂ ∂ ∂ , , φ = ~ux + ~uy + ~uz . grad φ = ∂x ∂y ∂z ∂x ∂y ∂z 59 D.h.: Ist das skalare Feld φ stetig und differenzierbar, so liefert die Gradientenbildung ein vektorielles Feld ~ r ) = grad φ(~r). A(~ Anschauliche Deutung: Betrachtet wird die Änderung des skalaren Feldes φ beim Fortschreiten vom Punkt ~r um einen kleinen Schritt ∆~r = (∆x, ∆y, ∆y). Die Änderung des Feldes ist ∆φ = φ(~r + ∆~r) − φ(~r) wenn die partiellen Ableitungen stetig sind ∂φ ∂φ ∂φ ∆x + ∆y + ∆z + o |∆~r|2 ∂x ∂y ∂z = grad φ · ∆~r + o |∆~r|2 . = Für ein infinitesimales Element d~r ist die Änderung des skalaren Feldes φ dφ = grad φ · d~r und diese Gleichung kann als allgemeine, von einem Koordinatensystem unabhängige Definition des Gradienten betrachtet werden. Die Gleichung entspricht dem totalen Differential von φ(x, y, z): ∂φ ∂φ ∂φ ∂φ ∂φ ∂φ dx + dy + dz = ~ux + ~uy + ~uz · (~uxdx + ~uy dy + ~uz dz) . dφ(x, y, z) = ∂x ∂y ∂z ∂x ∂y ∂z Wenn der Vektor d~r innerhalb der Fläche φ = const liegt, ist dφ = grad φ · d~r = 0. Daraus folgt, daß der Vektor grad φ jeweils senkrecht auf der Fläche φ = const steht und in die Richtung des stärksten Anstiegs zeigt. Die Änderung dφ wird maximal, wenn d~r parallel zu grad φ ist, also parallel zur Flächennormalen ~n liegt. Der Normaleneinheitsvektor ~n auf einer Fläche φ(x, y, z) = const ist daher gegeben durch grad φ(x, y, z) . ~n(x, y, z) = | grad φ(x, y, z)| Die Änderung von φ beim Fortschreiten in einer bestimmten Richtung, die durch einen Einheitsvektor ~u gegeben ist, ergibt sich durch die Wahl d~r = ~ u ds: dφ = grad φ · ~u ds bzw. dφ = grad φ · ~u ds (Richtungsableitung von φ nach ~ u). ~ als Gradientenfeld Ist ein Vektorfeld A ~ = grad φ A darstellbar, so hat es die stetigen Komponenten Ax = ∂φ ∂x Ay = ∂φ ∂y Az = ∂φ . ∂z Gelten die Beziehungen ∂Ay ∂Ax = ∂y ∂x so folgt ∂2φ ∂2φ = ∂x∂y ∂y∂x ∂Ay ∂Az = ∂z ∂y ∂2φ ∂2φ = ∂y∂z ∂z∂y ~ Dies ist hinreichend für stetige Komponenten des Vektorfelds A. ∂Az ∂Ax = , ∂x ∂z ∂2φ ∂2φ = . ∂z∂x ∂x∂z Nabla-Operator: ~ definiert durch Der Gradient kann durch den Nabla genannten Vektoroperator ∇, ~ = ~ux ∂ + ~uy ∂ + ~uz ∂ , ∇ ∂x ∂y ∂z ausgedrückt werden in der Form ~ grad φ = ∇φ. ~ ist selbst Er wirkt auf alle rechts neben ihm stehenden direkt angeketteten Funktionen. Der Nabla-Operator ∇ kein Vektor (er hat keine Richtung), verhält sich jedoch unter Koordinatentransformationen wie ein Vektor. Kurvenintegrale ~ r ), durch das jedem Punkt ~r ein Vektor A ~ zugeordnet wird, und eine Kurve C Gegeben sei ein Vektorfeld A(~ ~ r ) längs der Kurve C ist zwischen den Punkten ~ra und ~rb . Das Kurvenintegral (oder Linienintegral) über A(~ definiert als Grenzwert einer Riemann-Summe. Dabei wird längs der Kurve C, die in kleine vektorielle Linienele~ ri ) mit den Linienelementen mente ∆~ri eingeteilt ist, die Summe über die skalaren Produkte des Vektorfeldes A(~ ∆~ri gebildet: Z ~rb X ~ ri ) ∆~ri = ~ r ) d~r. A(~ A(~ lim ∆~ r→0 y, Ay ~ ra ,C C .. .... .. .. ...... .. ............ .... .. ... ... .... .... ... ... ................. ..... ... ................ ... .... .. .... ................ .. .. .... .. . ................ ... . .. .. . ... . . ... .. ... ..... .... .. ..... ... .... ................................... .. ... .. .. .... .. ... ............ . . . .. . . . . ... . ... ..... . .. .. .... ... ... . ... .. .. ... ......... .... ......... .. ......... .. .. ......... . . . . . . . . . . . . . . . . . . . . . ... . . . . . . . . . . . . .. .................... .... .. b .............................................................................................. .. a ...................... ..................................... ... ..................................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .... . . . . . .......... ... . ................ ............................................................ ...................................................................................................................................... ~r ~ A ............ ............................ ................ .... . . ....... .... ............. ........... . . . . . . . . . . . . ......... ............... . . . . . . . . . . ........... C ....... . . . .. . . ~r ... x, Ax ~ r ) im allgemeinen vom Anfangspunkt Der Wert des Kurvenintegrals hängt bei vorgegebenem Vektorfeld A(~ ~ra , vom Endpunkt ~rb und von der Form der Kurve C zwischen ~ra und ~rb ab. Es gilt Z ~ra Z ~rb ~ r ) d~r = − ~ r ) d~r. A(~ A(~ ~ ra ,C ~ rb ,C ~ entlang der Kurve C: Bei geschlossener Kurve (~ra = ~rb ) heißt das Kurvenintegral die Zirkulation Γ von A I ~ r ) d~r A(~ Γ= C Zur Berechnung kann das Kurvenintegral auf ein gewöhnliches Riemann-Integral zurückgeführt werden, wenn die Kurve C durch eine Parameterdarstellung ~r(t) mit ~r (ta ) = ~ra und ~r(tb ) = ~rb gegeben ist. Für einen einzelnen Summanden der Riemann-Summe gilt ~ r ) d~r dt ~ ri ) ∆~ri (t) ∆t → A(~ ~ ri ) · ∆~ri = A(~ A(~ ∆t dt und es folgt Z ~ rb Z ~ r ) · d~r = A(~ ~ ra ,C tb ~ r (t)) · A(~ ta d~r dt dt. Konservative Vektorfelder ~ r ) dargestellt werden kann als Gradient eines skalaren Feldes φ(~r), Wenn das vektorielle Feld A(~ ~ = grad φ, A so ist der Wert des Kurvenintegrals Z ~ rb ~ r ) d~r = φ(~rb ) − φ(~ra ). A(~ ~ ra ,C ~ für das das Kurvenintegral vom Weg unabhängig ist, unabhängig vom Weg C. Umgekehrt kann ein Feld A, dargestellt werden als Gradient eines skalaren Feldes. Beweis: Der Weg C sei durch die Parameterdarstellung ~r = ~r (t) gegeben. Dann ist Z tb Z tb Z tb Z ~rb ∂φ ∂z d~r d~r ∂φ ∂x ∂φ ∂y ~ ~ + + dt grad φ dt = A(~r) d~r = A(~r(t)) dt = dt dt ∂x ∂t ∂y ∂t ∂z ∂t ~ ra ,C ta ta ta Z tb dφ = φ(tb ) − φ(ta ) = φ(~rb ) − φ(~ra ). = ta Der Wert des Integrals ist nur abhängig von den Endpunkten ~r(ta ) und ~r(tb ), er ist unabhängig vom Weg C. ~ = grad φ verschwindet die Zirkulation Γ: Für Gradientenfelder A I I ~ grad φ · d~r = 0. A · d~r = Γ= C C ~ das als Gradient eines skalaren Feldes φ(~r) dargestellt werden kann, heißt konservatives Ein Vektorfeld A, Vektorfeld, das zugehörige skalare Feld φ heißt Potential (s. Abschnitt 11.9). 11.3 Divergenz, Flächenintegral und Gaußscher Satz Divergenz ~ Die Divergenz eines Vektorfeldes A, ~ r ) = Ax · ~ux + Ay · ~uy + Az · ~uz , A(~ ist im kartesischen Koordinatensystem definiert durch: ~ =∇ ~ ·A ~ = ∂ , ∂ , ∂ · (Ax , Ay , Az ) = ∂Ax + ∂Ay + ∂Az . div A ∂x ∂y ∂z ∂x ∂y ∂z Die Divergenz ist ein skalares Feld, das als Quellstärke eines Vektorfeldes bezeichnet wird. Sie ist definiert, wenn das Vektorfeld stetig und differenzierbar ist. Anschauliche Deutung. Als Beispiel für ein Vektorfeld dient eine Stromdichte ~j = ρ~v , die als eine mit der Geschwindigkeit ~v strömende Flüssigkeit der Dichte ρ interpretiert werden kann. Durch eine parallel zur yz−Ebene liegende Fläche ∆S = ∆y∆z strömt der Fluß Φx = jx · ∆y∆z. Betrachtet wird ein Quader mit den Seitenlängen ∆x, ∆y und ∆z. Als Differenz der Flüsse jx (x + ∆x, y, z) · ∆y∆z durch die rückseitige Fläche und jx (x, y, z) · ∆y∆z durch die vordere Fläche ergibt sich der Überschuß des aus dem Quader strömenden Flusses : ∂jx ∆x∆y∆z. ∂x Analoge Ausdrücke für die anderen Flächen des Quaders ergeben insgesamt für den Flußüberschuß aus dem Volumen ∆V , d. h. für den durch die Quelle erzeugten Fluß Φq = ∆Φ: ∂jy ∂jz ∂jx + + ∆x∆y∆z = div ~j · ∆V. Φq = ∂x ∂y ∂z ∆Φx = (jx (x + ∆x, y, z) − jx (x, y, z)) ∆y∆z = Für div ~j > 0 befindet sich eine Quelle des Flusses innerhalb des Volumens ∆V , für div ~j < 0 eine Senke des Flusses. Für ein Feld ~j ohne Quellen und Senken gilt div ~j = 0; dies gilt im Falle einer Stromdichte ~j = ρ~v , wenn die Flüssigkeit inkompressibel ist (ρ = const, bzw. ∂ρ/∂t = 0). .................................................................................................... .... . .. .. ... ... .... . .. .... . .... . .... . ... . . ... . . .... . ..... . . . ... . . . . .. ... .... . . ... .... . . . . .... . . . .. ... . . . .. .... . . . ... ............................................................................................................... . . . . . . . ..... ... . . . . .. .... . . . . ... ... . . . . . . . . .. .... . . . . . . . . ... ... . . . . ... ... . . . . ... ... . . . . .. .... . . . . ... ... . . . . .. ... . . . . ... ... . . . . . . . . .... .... . . . . . . . . ... ... . . . . . .... . . . . ... ... . . . . ... ... . . . . ... ..... . . . . . . . . ... ...... . . . . . . . . ..... ... . . . . .. .. . . . . . ... . . . . ....... .... .... .... .... .... .... ....... .... .... .... ..... ........ .... . . . . . . .. .. ..... . . . . . ....... ... . . ..... .... . . ...... ... . . . .... .... . . ...... .. . ... .. . .... .... .... .... .... ........................................................................................................ z .... ...... .......... .. ... .... .. ... .... .. ... .... .. ... .... .. ... .... ...... .. ............. ... ... .... ...... .. ..... .................................................................................................................................................................................................................. y ∆z ∆y ∆x x Flächenintegral ~ durch eine Fläche ∆S mit Normalenvektor ~n ist Der Fluß ∆Φ eines Vektorfeldes A ~ · ~n ∆S. ∆Φ = A Die Schreibweise als Skalarprodukt liefert automatisch das Vorzeichen des Flusses relativ zur Richtung der Flächennormalen. ..... ...... ......... ... .... .. ... ... .... ...... .. .......... ... . . . . . . . . . . ................ . .. ..... ........... ... ............................................................... .. ................ .. .. ....... .... .... .. .. . . ... .. . . .. .. ... .. .. .......... .... .. .. . . . .................... .. .. .. . ................... . ................. .. ................. ................. .. ................. ... ....... . ...... ....... ......... ... .... .. ... .... .. ... ... .... .. . ......... .... ................................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . ............... ........... . . . . ......... . . . . ..... . ...... ..... . . .. . .. ..... .. . .... .. ........ ..... . . . . . . ............. . ........ . . . . . . ....................... . . . . . . . . . . . .......................................................... .. ~n ~n ~ A dS S C Für eine allgemeine Fläche ergibt sich der Fluß als Grenzwert einer Riemann-Summe: ZZ N X ~ · ~n dS = ~ i · ~ni ∆Si A lim A Φ= ∆Si →0,N→∞ S In kartesischen Koordinaten ist: ZZ ~ · ~n dS A ZZ ZZ = Z ZS S Ax nx dS + ZZ S Ax dydz + = S S i=1 ZZ Ay ny dS + Az nz dS ZZ S Ay dzdx + Az dxdy. S Wenn für die Randkurve C der Fläche S ein Umlaufssinn definiert ist, so gilt für den Zusammenhang mit der Normalenrichtung die Rechte-Hand-Regel: zeigen die Finger in Richtung des Umlaufsinns, so zeigt der Daumen in die Normalenrichtung (Rechtsschraube). Bei Integralen über eine geschlossene Fläche S, die ein Volumen V einschließt, schreibt man ZZ ~ · ~n dS. Φq = A S Konventionsgemäß zeigt bei geschlossenen Flächen der Normalenvektor ~n stets nach außen. Zieht man die Größe der Fläche und die Richtung der Flächennormalen zusammen erhält man ~ dS Φq = ~n ZZdS ~ · dS. ~ = A und S Gaußscher Satz ~ eine Beziehung her zwischen dem Volumenintegral über die Der Gaußsche Satz stellt für ein Vektorfeld A Divergenz des Vektorfeldes und dem Oberflächenintegral für den Fluß des Vektorfeldes. Er lautet: ZZ ZZ ZZZ ~ dV = A ~ · dS ~= A ~ · ~n dS. div A V S S Dabei ist S die das Volumen V einschließende geschlossene Fläche. Beweisskizze: Für ein kleines Volumen ∆V , das durch die Fläche ∆S umschlossen wird, gilt, wie oben gezeigt wurde, der Zusammenhang ~ · ∆V = A ~ · ~n ∆S. ∆Φq = div A Dies gilt für Quader im kartesischen Koordinatensystem und damit auch für infinitesimal kleine Volumina. Nach den folgenden Überlegungen gilt diese Aussage und damit der Gaußsche Satz für jedes beliebige Volumen. Der durch die Quellen bzw. Senken verursachte Fluß Φq durch die Oberfläche S des Volumens V ergibt sich aus der linken Seite durch Summation über alle infinitesimal kleinen Teilvolumina: ZZZ ~ dV div A Φq = V Den Fluß durch die Oberflächen erhält man aus der rechten Seite. Teilt man das Volumen V durch eine ........................................................... ........... ........ ..... ........ ..... ............................................................. ........ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ............................................ .... ........... . . . . . . . . ... . . . . . . .. .. ... ..... . ... . . . . . . .. . . ...... ... . . . ... . ... .. . ... .... . . . .. . ... ... .. .. . . .. . . . ... .. ... ... .. . .. . . . ... .. ... .... .. 2 1 .. . . . . .. . . .. .. . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. .. .. . . . . 1 2 .. ... ..... .. ... .... . .. ... ... .. ... .... . . ... . . . . . . . . ..... ... ... ... ... ..... ... . ... ... .. ....... .. . ...... ... .......... .. . . ................................................................................................................................ ... . . . . . . . . . . . . . . . . . . . . . . .. ........................ ..... .. . . ...................... ....... ... ............ .... .... .............................................................. ....... ...... ....... .. V S1 ~n ~n S12 V S2 Schnittfläche S12 in zwei Volumina V1 und V2 , sodaß die jeweiligen Oberflächen S1 + S12 bzw. S2 + S12 werden, so gilt für den Fluß durch die jeweiligen Volumina: ZZ ZZ ~ · ~n dS + A Φq1 = S1 ZZ Φq2 ZZ ~ · ~n dS + A = ~ · ~n1 dS A S12 ~ · ~n2 dS. A S2 S12 Gemäß Richtungskonvention ist ~n1 = −~n2 , daher heben sich bei Addition die Beiträge durch die (gemeinsame) Schnittfläche auf: ZZ ~ · ~n dS. Φq = Φq1 + Φq2 = A S Die Aufteilung in 2 oder auch mehrere Volumina ist beliebig. Der Gaußsche Satz gilt damit für beliebige Volumina. Der Gaußsche Satz ermöglicht eine allgemeine, vom Koordinatensystem unabhängige Definition der Divergenz als Grenzwert eines Integrals: ZZ ~ · ~n dS. ~ = lim 1 A div A ∆V →0 ∆V ∆S ~ = ~a · φ mit beliebigem, aber Gaußscher Satz für skalare Felder: Für die Divergenz des Vektorfeldes A konstantem Vektor ~a gilt ~=∇ ~ (~a · φ) = ~a ∇ ~ φ = ~a · grad φ = ax div A Einsetzen in den Gaußschen Satz liefert Z ZZ ∂φ ∂φ ∂φ + ay + az ∂x ∂y ∂z ZZ ~ ~a · grad φ dV = ~a · φ(~r) dS. V S Da der konstante Vektor ~a beliebig gewählt werden kann, folgt ZZ Z ZZ ~ grad φ dV = φ(~r) dS. V 11.4 S Rotation und Stokesscher Satz Rotation ~ r) Die Rotation eines Vektorfeldes A(~ ~ r ) = Ax ~ux + Ay ~uy + Az ~uz A(~ ist in kartesischen Koordinaten definiert durch ~ ~uy ~uz ux ~ = ∇ ~ ×A ~ = ∂/∂x ∂/∂y ∂/∂z rot A Ax Ay Az ∂Ay ∂Az ∂Ax ∂Ax ∂Ay ∂Az − ~ux + − ~uy + − ~uz . = ∂y ∂z ∂z ∂x ∂x ∂y Die Rotation erzeugt ein vektorielles Feld, das als Wirbelfeld (engl.: solenoidal field) des Vektorfeldes bezeichnet wird. Die Rotation an einem Punkt ist definiert, wenn das Vektorfeld dort endlich, eindeutig und differenzierbar ist. Anschauliche Deutung: Betrachtet wird die Rotation eines starren Körpers mit der Winkelgeschwindigkeit ~ω . Einem Punkt des starren Körpers mit Ortsvektor ~r kann ein Geschwindigkeitsfeld ~v = ~ω × ~r zugeordnet werden. Für die Rotation dieses Geschwindigkeitsfeldes ergibt sich rot ~v = rot(~ω ×~r) = 2~ω. Das Wirbelfeld rot ~v ist also konstant. Stokesscher Satz ~ eine Beziehung her zwischen der Zirkulation (dem Kurvenintegral über eine Der Satz stellt für ein Vektorfeld A geschlossene Kurve C) und dem Flächenintegral über die Rotation: I ZZ ~ · dS ~= ~ · d~r. rot A A S C Dabei ist S eine durch die Kurve C begrenzte Fläche. ........................................................................... ............... ............. ... ......... .......... ........... ............................................................................................ .... ...... ....... ...... ..... .. . ....... . . . . . . . . ... . . ..... .......... ... ..... ...... .... ... . .... ... ............. ....... ... ................ . . . . . . . . . . . . ......... . . .... ............. ............ ... .. . .... ... . ...... ... ....... .. ....... ...... ............................ .. ................................................................................................. ........... ..... .. .. ... . .... . . . . . . . . . . . . ... ... . .. . . .... ... ... .. ....... .. .. .. ... ....... ... .. .. ... ... ... ............. .... .. ... .. .............. ... .. .. .. .............. ......... .. ... .. . . . . . . . . . . . . . . . . . . . . ........................ ..... ... . . ..... .. ... ..................................................................................... ... ...... .. .... .. .... .. ... .. .............. ... ............ .... .. .. . . . .... . . ... ................ .... .. . .. .. ................... . .. ............... .. ... .. .. ... ......................................................................................................................... ... ..... .. .. .... ... ... . ... . ......... . . . . . . .... ........... ... . .......... . .... . . . . . . . . . .............. .... . . .... .. ...................... ................ .................................................................................................................. . ~n S C Beweisskizze: Zunächst wird der Stokessche Satz für ein kleines Flächenelement ∆S = ∆x∆y parallel zur ~ xy−Ebene betrachtet.Für dieses Flächenelement ist die Normale ~n = ~uz . Das Flächenintegral über rot A ZZ ZZ ~ ~ ~ · ~n dS rot A · dS = rot A I= ∆S ∆S ~ in die Rechnung ein: wird umgeformt; wegen ~n = ~ uz geht nur die z−Komponente rot A z ~ = ∂Ay − ∂Ax . rot A z ∂x ∂y Für das Integral I folgt: ZZ ZZ ∂Ax ∂Ay ~ · ~uz dS = − dS rot A I = ∂x ∂y z ∆S ∆S # # Z x1 +∆x "Z y1 +∆y Z y1 +∆y "Z x1 +∆x ∂Ay ∂Ax dx dy − dy dx = ∂x ∂y y1 x1 x1 y1 Z x1 +∆x Z y1 +∆y [Ay (x1 + ∆x, y) − Ay (x1 , y)] dy − [(Ax (x, y1 + ∆y) − Ax (x, y1 )] dx. = y1 x1 Der letzte Ausdruck läßt sich auch schreiben als Summe von vier Kurvenintegralen, jeweils über eine Seite des Flächenelements ∆S: Z x1 Z y1 +∆y Ay (x1 + ∆x, y) dy + Ax (x, y1 + ∆y) dx I = y1 y1 Z Z + y1 +∆y x1 +∆x x1 +∆x Ay (x1 , y) dy + Ax (x, y1 ) dx. x1 ~ längs der Randkurve ∆C des Flächenelements ∆S dar: Dieser Ausdruck stellt gerade die Zirkulation von A Z Z Z Z I ~ · d~r = ~ · d~r + ~ · d~r + ~ · d~r + ~ · d~r. A A A A A I= ∆C a→b b→c c→d d→a Die Integrale des Stokesschen Integralsatzes haben die Form von Skalarprodukten, daher gilt der skizzierte Beweis für jede Orientierung des Flächenelements ∆S. y ...... ..... ................................................................................................ .......... ... .... ... ... .. ... ... ..... .... ... .. .. ... .... ... ... .. ... .... ... ... .. . .... . ........ ..... .. . ..... .......... ... ... .... .... ... .. ... .... ... ... .. ... .... ... ... .. .... ... ... .. .. . . . ......... ............................................................................................... ... .. .. .... ... ... .................................................................................................................................................................................................................... c b ∆y y1 d a ∆x x1 x Zu zeigen ist noch, daß der Stokessche Satz auch für beliebige Flächen gilt. Eine Fläche S mit Randkurve C kann in zwei Teilflächen S1 und S2 mit entsprechenden Randkurven C1 + C12 bzw. C2 − C12 zerlegt werden mit C1 + C2 = C (die Randkurven enthalten einen gemeinsamen Weg C12 ). Für die Integrale über die Flächen S und S1 , S2 gilt: ZZ ZZ ZZ ~ · ~n dS = ~ · ~n dS + ~ · ~n dS. rot A rot A rot A S S1 S2 In den Kurvenintegralen heben sich die Beiträge von dem gemeinsamen Weg C12 auf: Z Z Z I Z ~ · d~r + ~ · d~r + ~ · d~r − ~ · d~r = ~ · d~r. A A A A A C1 C12 C2 C12 C Aus dieser Additivitätseigenschaft der Integrale folgt die Gültigkeit des Stokesschen Satzes für endliche Flächen, denn jede Fläche kann beliebig in kleine, infinitesimale Flächenelemente zerlegt werden. Der Stokessche Satz ermöglicht eine allgemeine, vom Koordinatensystem unabhängige Definition der Rotation als Grenzwert eines Integrals: I 1 ~ ~ · d~r. ~ A rot A = ~n · rot A = lim ∆S→0 ∆S ∆S ~ n Betrachtet wird dabei eine Folge von Flächenelementen ∆S mit der Flächennormale ~n und den Randkurven ∆C; ~ in Richtung der Flächennormale der Grenzwert ist nach dem Stokesschen Satz gleich der Komponente von rot A ~n. ~ im Innern des Flächenelements ∆S nicht stetig zu sein. Bei dieser Definition braucht das Vektorfeld A 11.5 Regeln für Differentialoperatoren Produktregeln: Durch Anwendung der gewöhnlichen Produktregel der Differentialrechnung können Ausdrücke, bei denen ein Vektordifferentialoperator auf ein Produkt angewendet wird, umgeformt werden. Ein ................................................................................................. ... .... ... ..... ... ... ... ... .... ... ... ... ... .. ...... ....... ....... .... ... ..... ... ... ... ... ... ... .... ... ... ... ... .. ................................................................................................. S ................................................................................................ ... .... ... ..... ... ... 2 ... ... ...... . . . ...... ......... .... 21 .... . ................................................................................................... .............................................................................................. ... ... .. ........ 12 .......... ..... . . .... .... .. 1 ... ................................................................................................. S C C S Beispiel ist die folgende Umformung: ~ div φA ∂φ ∂φ ∂ ∂ ∂φ ∂Ax ∂Ay ∂Az ∂ (φAx ) + (φAy ) + (φAz ) = Ax + φ + Ay + φ + Az + φ ∂x ∂y ∂z ∂x ∂x ∂y ∂y ∂z ∂z ~ · grad φ + φ div A. ~ = A = In der Schreibweise mit dem Nabla-Operator lautet diese Produktregel: ~ · φA ~ = ∇φ ~ ~+φ ∇ ~ ·A ~ . ∇ ·A Bei Vektordifferentialausdrücken, die auf Produkte angewendet werden, ist zu beachten, daß der Nabla-Operator ~ sowohl ein Differentialzeichen ist, als auch sich wie ein Vektor verhält. Folgende Regel kann bei Produkten ∇ benutzt werden: ~ als Summe von Differentialausdrücken 1. Der Differentialausdruck wird mit Hilfe des Nabla-Operators ∇ geschrieben, in denen jeweils nur ein Faktor differenziert wird (die konstant zu haltenden Faktoren erhalten den Index c). 2. Gemäß den Regeln der Vektorrechnung werden die Ausdrücke so umgeformt, daß die konstant zu haltenden Faktoren links vom Nablazeichen stehen, das dann durch grad, div oder rot interpretiert wird. Mit dieser Regel erhält man folgende Formeln: grad (φψη) = ~ ~ ~ ∇φψ c ηc + ∇φc ψηc + ∇φc ψc η = ψη grad φ + φη grad ψ + φψ grad η ~ cA ~ ~ A ~ c + ∇φ ∇φ ~ div φA = ~ rot φA = = ~×B ~ div A = ~ · grad φ + φ div A ~ A ~ × φc A ~ ~ × φA ~c + ∇ ∇ = ~ × grad φ + φ rot A ~ −A ~ =B ~ ∇ ~ ×A ~ −A ~ ∇ ~ ×B ~ ~ A ~c × B ~ A ~×B ~c + ∇ ∇ = ~ rot A ~−A ~ rot B. ~ B Bei Benutzung des Entwicklungssatzes für das zweifache Vektorprodukt gilt ferner: ~ ×B ~ ~ × A ~×B ~ = ∇ ~ ·B ~ A ~− ∇ ~ ·A ~ B ~ rot A = ∇ ~ ∇ ~ ·B ~ + B ~ ·∇ ~ A ~−B ~ ∇ ~ ·A ~ − A ~·∇ ~ B ~ = A ~ ·∇ ~ schreibt man kurz Laplace-Operator: Für die doppelte Anwendung des Nabla-Operators in der Form ∇ den Laplace-Operator ∆ . Der Laplace-Operator ist gegeben durch 2 ∂2 ∂2 ∂ ~ ~ + 2 + 2 . ∆ = ∇·∇ = ∂x2 ∂y ∂z Zweite Ableitungen: Folgende Regeln gelten für die zweifache Anwendung des Nabla-Operators: div grad φ rot grad φ ~ div rot A ~ rot rot A 11.6 ~ · ∇φ ~ = ∆φ = ∇ ~ × ∇φ ~ ≡0 = ∇ ~ · ∇ ~ ×A ~ ≡0 = ∇ ~ × ∇ ~ ×A ~ =∇ ~ ∇ ~ ·A ~ − ∇ ~ ·∇ ~ A ~ = grad div A ~ − ∆A. ~ = ∇ Eigenschaften von Wirbel- und Gradientenfeldern Quellenfreiheit von Wirbelfeldern: Betrachtet wird ein Volumen V mit der Oberfläche S. Wird eine Schnittfläche S0 durch das Volumen gelegt, so wird sie durch die Randkurve C an der Oberfläche des Körpers begrenzt. Sie zerschneidet S in zwei Teile, S1 und S2 , die sich bei C berühren. .... ... ... 0 .. ....... .. ... . ............................................. . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...... . . . . . . . . . . . . ...... ........... . . . . . . . . . . . .. . . . ........... ........ ... ... .... ... ... .... ... ... ... .... ... ......... ..... .... ... ... .... ... ... .... ... ... ... .... ... ... ... ......... .. ... ... .... ... ... .... ... ... ... .... ... . ....... ... ......... . . . . . . . . . . . . . . . . .......... .. ............................ . . . . . . .............................. ... .. . .... ... .. ....................................... ... .... . ... .. .. ... ... ... ........... ... ... ... .. .. .... ...... .. . . . ... . . ... . . . . . .. .. ... .. ............................................... .. . .. .. .................................... .... ... .. ................. .. .. .. . . . .. . ... . ... ... . ... ...................... ... .... .. .. ......... ...................................................... ........ ... ... ........ .... .... .......... .... . ...... ........... ............................... ... .. ... .... ......... 2 ........ S C S 1 ..... ... ... ... ..... ............................................................ . . . . . . . . ................................. ...... ... .. . .......... ..... .. .... ... ... ....... .. ............................................................... .... ............... .......... .. ... ... ... . .. . ... ................ .... .. ... . . . . ............. ....... ........ ......... ....... ........ ......... ......... ... . . .... ................ .. .............................................................. ... ...... ............... .... .... .. ... . .... . ... .. .. ..... ... .... ............. ..... ... . ........... .... ............. ... ................. .... .... ....................................................................... C S ~ = rot A ~ durch die Flächen S1 , S2 und S0 (dem Nach dem Stokesschen Satz ist der Fluß des Vektors B Betrage nach) gleich: ZZ I ZZ ZZ ~ ~ ~ ~ ~ · d~r rot A · ~n1 dS = rot A · ~n dS = BdS = A S1 S1 S0 C ZZ I ZZ ~ ~ ~ · d~r. rot A · ~n2 dS = rot A · ~n dS = A = − S2 S0 C Die Flächennormale ~n wurde so gewählt, daß sie in das Innere des Körpers mit S1 zeigt. Da ~n1 und ~n2 in entgegengesetzte Richtungen (nach außen) zeigen, ergibt sich der Vorzeichenwechsel in der 2. Zeile. Subtrahiert ~ durch die Gesamtfläche S = S1 + S2 man beide Zeilen, so erhält man für den Fluß des Vektorfeldes rot A ZZ ~ · ~nS dS = 0 rot A S Die Anwendung des Gaußschen Satzes liefert als Folge ZZZ ~ dV = 0 div rot A V ~ Da dies für jedes Volumen gilt, folgt für ein beliebiges Vektorfeld A. ~≡0 div rot A ~ = rot A ~ ist quellenfrei. Diese Aussage folgt auch aus einer differentiellen oder in Worten: das Vektorfeld B Betrachtung: ~=∇ ~ · ∇ ~ ×A ~ = ∇ ~ ×∇ ~ A ~ ≡ 0. div rot A Wirbelfreiheit von Gradientenfeldern: ~ = grad φ ergibt die Bildung der Rotation: Für ein Gradientenfeld A ~ rot A ~ × ∇φ ~ = rot grad φ = ∇ ∂φ ∂φ ∂φ , , = rot ∂x ∂y ∂z 2 2 2 ∂2φ ∂2φ ∂2φ ∂ φ ∂ φ ∂ φ − + ~ux − + ~ux − ≡ 0. = ~ ux ∂z∂y ∂y∂z ∂x∂z ∂z∂x ∂y∂x ∂x∂y ~ = 0) eines Vektorfeldes A ~ sind: Äquivalente Folgerungen aus der Wirbelfreiheit (rot A Z I ~ · d~r = 0 A C rb ~ ~ · d~r = wegunabhängig A ~ ra ~=0 Eine genauere Formulierung dieser Aussage ist: Wenn in einem einfach zusammenhängenden Gebiet rot A ~ kann dargestellt werden als Gradient grad φ eines gilt, dann gelten die obigen Aussagen und das Vektorfeld A skalaren Feldes φ. Ein Gebiet ist einfach zusammenhängend, wenn für je zwei Punkte des Gebiets mindestens ein ganz in dem Gebiet verlaufender Weg C existiert und jeder andere Weg durch stetige Verformung in den Weg C übergeführt werden kann. .......................... ...... . . . . ........ ..... . .... ... ... .. .... ..... ... .... ... ... ........... . . . ... . . . . . . . . . . . .... ...... ... ... .... ... ... .... ... .......... ..... . . . . . . . . . . . . . . . ........ ........ ... ... ... .... ... ... .... ... ... .............. ......... .... ... ... ... .... ... ... .... ... ... .... ... .............. . . . . . . .... . . . . . . . . . . . . . . . . . . . . . . . . . ... ......... ... ... .... ... ... ... .... ... ... .... ... ... .... ... ... ... ... ..... . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. ..... .... ... ... .... ... ... ... .... ... ... .... ... ... .... ... ... .... .. ..... .... ... ... .... ... ... ... .... ... ... .... ... ... .... ... ... .......... . . .... . ... .... ... ... .... ... ... ... .... ... ... .... ... ... .... ... ... ........ ........ .... ... ... .... ... ... ... .... ... ... .... ... ... .... ... ... ..... ................. .. . . .... ... ... ... .... ... ... .... ... ... .... ... ..... .................................. . . . . . . . . . . . . . . . . .... .............................. . . . . . . . . . ..... ........................... . ................ ........... einfach 11.7 ............. ......... . . ........ ...... .. ... .... ........ ..... . . . . . . . .... .......... .... ..... ...... .... ........... . . . ..... . . . . . . . . . . . ...... .... . . . . . . . . . . . . ....... .... . . . . . . . . . . . . . . . ........ ...... ... ... .... ... ... .... ... ... .... ... ............. .......... ... ... .... ... ... .... ... ... .... ... ... ................ . . . . . .... . . . . . . . . . . . . . . . . . . . . . . . . . ... ......... ... .... ... ... .... ... ... .... ... ... .... ... ... ... .... . ... ..... . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. ....... ... ... .... ... ... ..................................................... ...... .... ..... .... ...... ........ . .... . . . . . . . . . ... ... . .... ... ... .... ... ........................ ...................... .... ... ... ... .... ......... ..... .... ... ... .... ... ... .... . ............. . .. ... .... ... ... ... ....... .......... ... ... .... ... ... .... ... ... .... ... ... .... ... ... ... .. ... .................... . . . . . . . . . . . . . . . . . . . . . . .... .................................. . . . . . . . . . . . . . . . ... ............................... . . .. .... ... .. ...... .......................................... ............. ........ . .......... ..... . .... . ...... .... . . . . . . .... .... . .... ..... ...... .... ..... .......... . . ... .. ...... ... ... ... .... ... ... .... ........ ..... . . . . . . . . . . . . . . . ......... ....... .... ... ... ... .... ... ... .... ... ... . ........... ...... . .. .... ... ... ... .... ... ... .... ... ... .... . ............ . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . ....... . . . . . . . . . . . . . . . . . . . . . . . . ... .... . .... . . .. .... ... ... ... .... ... ... .... ... ... .... ... .. ... ... . . . . . . . . . . .............................................. ... ... .... ... .. ..... . ... . ... .... . . .. ............. . . ................................................................... .... ... ... .... . . .. ...................... ... . ... ... .... . . .. ....... .. .............................................. .... ..... ...... .... ........ ..... . . . . . . . . . . . . . . . . . . . . . . . . . . ... . .................. .. . . .. ....... ... ... .... ... ... .... ... ... .... ..... ................................... . . . . . . . . . . . . . . . .... ............................. . . . . . . . . . ...... ......................... ............. ........... zweifach zusammenhängend einfach Krummlinige Koordinaten Bisher wurden bei den Differentialoperatoren grad, div und rot die kartesischen Kordinaten x, y und z benutzt. Die Wahl eines speziellen krummlinigen Koordinatensystems kann die Behandlung eines physikalischen Problems wesentlich vereinfachen. Die krummlinigen Koordinaten werden mit u, v und w bezeichnet. Zwischen diesen Koordinaten und den kartesischen Kordinaten x, y und z muß eine umkehrbar eindeutige Abbildung existieren: x = x(u, v, w) y = y(u, v, w) z = z(u, v, w) bzw. u = u(x, y, z) v = v(x, y, z) w = w(x, y, z). Statt Koordinatenachsen, wie im kartesischen Koordinatensystem, definiert man Koordinatenlinien. Die u Linie ist die Schnittlinie der beiden Flächen v = const und w = const. Die v - und die w - Linie ergibt sich analog. Differentieller Ortsvektor, Einheitsvektoren, Linienelement und Metrik: Der Ortsvektor in kartesischen Koordinaten ist gegeben durch ~r = (x, y, z) oder beschrieben als Funktion der krummlinigen Koordinaten ~r = x(u, v, w) ~ex + y(u, v, w) ~ey + z(u, v, w) ~ez Die infinitesimale Änderung d~r in kartesischen Koordinaten, als Funktion der krummlinigen, lautet dann: d~r = ( ∂x ∂x ∂y ∂y ∂z ∂z ∂y ∂z ∂x du + dv + dw) ~ex + ( du + dv + dw) ~ey + ( du + dv + dw) ~ez ∂u ∂v ∂w ∂u ∂v ∂w ∂u ∂v ∂w oder kurz d~r = ∂~r ∂~r ∂~r du + dv + dw. ∂u ∂v ∂w (11.1) Die Beträge der Ableitungen von ~r nach den Koordinaten u, v und w heißen metrische Koeffizienten und beschreiben die Änderung des Maßstabs mit dem Ort: ∂~r ∂~r ∂~r . gv = gw = gu = ∂u ∂v ∂w Die Ableitung ∂~r/∂u ist ein tangential zur u−Linie gerichteter Vektor; entsprechendes gilt für die Ableitungen nach v und w. Die Einheitsvektoren in Tangentenrichtungen sind dann ∂~r ∂~r ∂~r ∂~r ∂~r ∂~r ~ev = ~ew = / / / ~eu = ∂u ∂u ∂v ∂v ∂w ∂w 1 ∂~r 1 ∂~r 1 ∂~r ~eu = ~ev = ~ew = . (11.2) gu ∂u gv ∂v gw ∂w Ist ~r in kartesischen Koordinaten gegeben, dann werden diese Einheitsvektoren auch durch kartesische Koordi- .... .. ..................... ...... ......... ... .......... ........ ..... . . . .... ...... ... .... .... ........ .. .... ......... .... .... .. ... ... .. . .. . . . .. .. ... .... ... .. ........ .... .... .. .. .. .. u ..... ...... ... ....... ... . . ..... .. ........... .. .. .......... .. .... ....... ...... . ............. . . . .. . . . ......... ....... ... ..... ...... ......... .... ...... .... ......... ..... ........ . ............. .. ....... .... w ................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ... . . . . . . ................................... ........ .... .. ..... ... ... v ... ... .. ............................................................................................... u z w ~e y v ~e ~e x naten ausgedrückt. Die Einheitsvektoren ~eu , ~ev und ~ew bilden an jedem Punkt des Raumes ein lokales Dreibein in den Richtungen der drei Koordinatenlinien. In diesem neuen Koordinatensystem wird d~r dargestellt durch d~r = (d~r · ~eu ) · ~eu + (d~r · ~ev ) · ~ev + (d~r · ~ew ) · ~ew Gleichung 11.1 eingesetzt, die partiellen Ableitungen durch 11.2 substituiert und unter Verwendung von (~eu · ~ex )2 + (~eu · ~ey )2 + (~eu · ~ez )2 = |~eu |2 = 1 führt zu d~r = gu du ~eu + gv dv ~ev + gw dw ~ew . Die Komponenten von d~r im krummlinigen Koordinatensystem sind demnach gu du, gv dv und gw dw. Mit den Bezeichnungen u1 , u2 und u3 für u, v und w und den Bezeichnungen ~ei bzw. gi für die Einheitsvektoren und die metrischen Koeffizienten läßt sich die Änderung des Ortsvektors kurz in der Form d~r = 3 X gi dui ~ei i=1 schreiben. Das skalare Linienelement ds erhält man aus dem Produkt (d~r)2 : ds2 = d~r · d~r = 3 3 X X 3 3 X X gi gj dui duj (~ei · ~ej ) = i=1 j=1 gij dui duj i=1 j=1 Die Elemente gij bilden die Metrik des Systems: ∂~r ∂~r = gi gj (~ei · ~ej ) . gij = ∂ui ∂uj Die gij formen eine Matrix g11 (gij ) = g21 g31 g13 g23 g33 g12 g22 g32 Das Flächenelement: Die Koordinatensysteme seien so gelegt, daß das in der Abbildung skizzierte kleine Flächenelement ∆f~ ganz in der xy - Ebene und ganz in der uv - Fläche liegt. .......... ........ . ...... .... ...... . . . . .......... . ..... ................................................ ..... .... ................................... . . . . . . . . . .......................... .. ..... ................. . . . . . . . . . . . . . . . . ......... ... ............... . ... ... ... ... ... ... .... ... ... .... ... ........... .... .............. . . . . . . . . . . . . . . . . . . . . . . ... .......... ....... ....... ....... ....... ....... ....... ....... ....... ....... ....... ....... ....................... ... ... ... .... ... ... ... ... .... ...... .... ..... .................. . . .. . .. . . . . . . . . . . . . . .... ....... .... ... ... ... .... ... ... ... ... ... .... ... ... . .... .. ....... ... . . . . . . . . . . . . . . . . . . . . .... ........ .... .... . . . ... . . . . . . . . . . . . . . . . . ..... .. .. ........ ..... ........ .... ..... .... ...... ..... .... ..... ..... .................................................... .. . . 13 ......................................... .............. ... .. . . .. . . . . . . . . . . . . . . . .. .... ..... .... ... . . ... . . . . . . . . . . . . . . . . ... .. ....... .... ... ... ..... ... ... ... .... ... ... ... ... ... ... .... ...... ... .... ... ... ....... ... ... ... .... ... ... ... ... ...... ... .. ... .... ... ... ..... ... ... ... .... ... ... ... ... ..... .. . ... . . . . . . . . . .. . . . . . . . . . . . . .. ... ... . . . . . . ... ... ...... ... ... ... .... ... ... ... .... .... ...... ... ... .... . . . ... . . . . . . . . . . . . ... ...... ....... ....... ....... ....... ....... ....... ....... ........................... ........................ .......................... ............. ........... ............ ............. . ........................................................... . . . .. . . . . . ... . .................... .. . . . . . . . . . . . ... . . .......................................... ... .... ... .. ... ... .... ... ... .... ............................... .. ..... ... .... ... ...................... ... ....... ............................... ... . ..... . . ..... ....... ....... ....... ....... ....... ............................... . ... .. ... .. ... ............... 12 ........... .... .. ... .. ........... . . .. ... . ........................................................................................................................................................................................................................................................................................................................... v − Linie y y3 df ~r y2 y1 u − Linie ~r x1 x3 x x2 Die Koordinaten der Eckpunkte werden über eine Taylorentwicklung verknüpft: Längs der u-Linie: Längs der v-Linie: ∂x ∆u; ∂u ∂x ∆v; x3 = x1 + ∂v x2 = x1 + ∂y ∆u; ∂u ∂y y3 = y1 + ∆v; ∂v y2 = y1 + und die Vektoren ~r12 und ~r13 werden ~r12 = ( ∂y ∂~r ∂x ∆u, ∆u, 0) = ∆u ∂u ∂u ∂u und ~r13 = ( ∂y ∂~r ∂x ∆v, ∆v, 0) = ∆v ∂v ∂v ∂v Ist ∆f~ klein, so berechnet es sich als Vektorparallelogramm ∆f~ = ~r12 × ~r13 ∂~r ∂~r × ) ∆u ∆v = ( ∂u ∂v ∂x/∂u ∂y/∂u ∆u ∆v · ~ef = ∂x/∂v ∂y/∂v ∂(x, y) ∆u ∆v · ~ef . ≡ ∂(u, v) Der Einheitsvektor ~ef steht senkrecht auf der Fläche ∆f und ist bei unserer Wahl des Koordinatensystems gleich ~ez . Beim Übergang zu infinitesimal kleinen Flächenelementen erhält man für den Betrag df = dx dy dx dy = ∂(x, y) du dv. ∂(u, v) Es wurde die Abkürzung für die Jacobi- oder Funktional-Determinante ∂x/∂u ∂y/∂u ∂(x, y) = ∂x/∂v ∂y/∂v ∂(u, v) benutzt. Das Volumenelement: Für die Transformation des Volumenelements aus krummlinigen in kartesische Koordinaten findet man .... .............. ...... ................. .......... ........ ...... . . . . .... ..... .... .... ......... ..... .. .... .......... .... .... .... .. .................................... ..... ...... . . .. . . . .. .. .. .... ....... .... ... .... .. .. .. ... ........ ...... .. ... ... ............... ..................... .. ... . . . . . . . . ..... . . .... .. . . .......... .. ....... ..... .. ... ....... .. .... .. . . . . . ... . . . . .... .... . ...... .. .. .... ... .... ........ .. u .. ...... .... .. .......... .... ..... .... . ... ............ ... ................. ..... ................................... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .... . . w .... ............................. ......... .. .... ... .... ... ... v ... ... .......................................................................................... ........ . u z w y g du v g dw g dv x dV = dx dy dz = ∂(x, y, z) du dv dw. ∂(u, v, w) Zum Beweis wird ein Parallelepiped als Volumenelement dV betrachtet, das durch die Vektoren ∂y ∂z ∂x du, du, du d~r1 = ∂u ∂u ∂u ∂y ∂z ∂x dv, dv, dv d~r2 = ∂v ∂v ∂v ∂y ∂z ∂x dw, dw, dw d~r3 = ∂w ∂w ∂w aufgespannt wird. Das Volumen des Parallelepipeds ist gleich dem Spatprodukt ∂x/∂u du ∂y/∂u du ∂z/∂u du dV = d~r1 · (d~r2 × d~r3 ) = ∂x/∂v dv ∂y/∂v dv ∂z/∂v dv ∂x/∂w dw ∂y/∂w dw ∂z/∂w dw dV = ∂(x, y, z) du dv dw ∂(u, v, w) Orthogonale Koordinaten Man nennt die krummlinigen Koordinaten u1 , u2 und u3 orthogonal, wenn für die Produkte der Einheitsvektoren 1 für i = j ~ei · ~ej = δij = 0 für i 6= j gilt. Für die Metrik bei orthogonalen Koordinaten folgt: 2 g1 0 (gij ) = 0 g22 0 0 0 0 g32 und es gilt für das Linienelement ds ds2 = d~r · d~r = 3 X 2 2 gi2 (dui ) = gu2 du2 + gv2 dv2 + gw dw 2 . i=1 Weil nach Definition gilt: ∂~r = gv ~ev ∂v ∂~r = gu ~eu ∂u erhält man für das Flächenelement ∂~r = gw ~ew ∂w = = ∂~r ∂~r × ) du dv ∂u ∂v (gu e~u × gv e~v ) du dv gu gv du dv (e~u × e~v ) = gu gv du dv e~w df~ = , ( Ähnlich verfährt man für das Volumenelement und erhält damit dV = gu gv gw ~eu · (~ev × ~ew ) du dv dw = gu gv gw du dv dw Die Funktionaldeterminanten in orthogonalen Systemen sind also ∂(x, y) = gu gv ∂(u, v) ∂(x, y, z) ∂(u, v, w) und = gu gv gw . Im folgenden werden ausschließlich orthogonale krummlinige Koordinaten betrachtet. Gradient: Der Gradient grad φ des skalaren Feldes φ ist allgemein definiert durch dφ = (grad φ) · d~r. In krummlinigen, orthogonalen Koordinaten u, v und w ist dφ = = (grad φ) · ~eu gu du + (grad φ) · ~ev gv dv + (grad φ) · ~ew gw dw (grad φ)u gu du + (grad φ)v gv dv + (grad φ)w gw dw und d~r = ~eu gu du + ~ev gv dv + ~ew gw dw. Durch Vergleich mit dem Ausdruck für das totale Differential ∂φ ∂φ ∂φ du + dv + dw dφ = ∂u ∂v ∂w erhält man als Komponenten des Gradienten: (grad φ)u = 1 ∂φ gu ∂u (grad φ)v = 1 ∂φ gv ∂v (grad φ)w = 1 ∂φ . gw ∂w ~ eines VektorDivergenz: Die allgemeine, vom Koordinatensystem unabhängige Definition der Divergenz div A ~ lautet: feldes A ZZ ~ dS. ~ ~ = lim 1 A div A ∆V →0 ∆V ∆S Als Volumenelement ∆V wird ein Quader im u, v, w-System mit Kanten parallel zu den u, v, w−Koordinatenlinien gewählt: ∆V = gu gv gw ∆u∆v∆w. Der Fluß durch die beiden Quaderflächen mit Normalen parallel zur u−Richtung ist unter Beachtung der jeweiligen Normalenrichtung Au (u + ∆u) ∆S(u + ∆u) − Au (u) ∆S(u). Mit ∆S = gv gw ∆v∆w für diese Quaderflächen wird der Fluß gv (u + ∆u) gw (u + ∆u) Au (u + ∆u)∆v∆w − gv (u) gw (u) Au (u)∆v∆w = ∂(gv gw Au ) ∆u∆v∆w. ∂u Als Fluß durch sämtliche Quaderflächen erhält man den Ausdruck ZZ ∂ ∂ ∂ ~ ~ (gv gw Au ) + (gw gu Av ) + (gu gv Aw ) ∆u∆v∆w, A dS = ∂u ∂v ∂w ∆S der gemäß der allgemeinen Definition der Divergenz gleich ~ ∆V = div A ~ gu gv gw ∆u∆v∆w div A ist. Damit erhält man die Formel für die Divergenz in orthogonalen krummlinigen Koordinaten: ∂ ∂ ∂ 1 ~= (gv gw Au ) + (gw gu Av ) + (gu gv Aw ) . div A gu gv gw ∂u ∂v ∂w ~ eines Vektorfeldes Rotation: Die allgemeine, vom Koordinatensystem unabängige Definition der Rotation rot A ~ lautet: A I ~ · d~r, ~ = lim 1 A rot A ∆S→0 ∆S ∆C n ~ wobei der Grenzwert einer Folge von Flächenelementen ∆S mit der Flächennormalen ~n betrachtet wird. Bei einem Flächenelement ∆S = gv gw ∆v∆w bildet der Umlaufsinn der Randkurve ∆C mit der Normalenrichtung ~n = ~eu eine Rechtsschraube. Das Kurvenintegral über die geschlossene Kurve ∆C ist: I ~ · d~r = gv (w)Av (w)∆v + gw (v + ∆v)Aw (v + ∆v)∆w − gv (w + ∆w)Av (w + ∆w)∆v − gw (v)Aw (v)∆w A ∆C = ∂(gv Av ) ∂(gw Aw ) ∆v∆w − ∆v∆w ∂v ∂w Im Limes ∆S → 0 erhält man: ~ = rot A u 1 gv gw ∂ ∂ (gw Aw ) − (gv Av ) . ∂v ∂w Bei Berücksichtigung der anderen möglichen Orientierungen des Flächenelements erhält man als Formel für die Rotation in orthogonalen krummlinigen Koordinaten: gu ~eu gv ~ev gw ~ew 1 ~ = ∂/∂u ∂/∂v ∂/∂w rot A gu gv gw gu Au gv Av gw Aw ∂(gw Aw ) ∂(gv Av ) ∂(gu Au ) ∂(gw Aw ) 1 − + gv ~ev − gu ~eu = gu gv gw ∂v ∂w ∂w ∂u ∂(gv Av ) ∂(gu Au ) − . + gw ~ew ∂u ∂v Laplace-Operator: Durch Kombination der Formeln für Divergenz und Gradient erhält man für den LaplaceOperator in krummlinigen Koordinaten: ∂ gw gu ∂φ ∂ gu gv ∂φ ∂ gv gw ∂φ 1 + + . ∆φ = div grad φ = gu gv gw ∂u gu ∂u ∂v gv ∂v ∂w gw ∂w .... .......... .......... ....... ... .... ... .. .... ... . .......... ... .. ........................ ... .............................. ...... .. .......... .......... ............. .... ...... .. .... ......... ............. ..... ... ... .. ... . .... . .. ... .. ... .... ... ... .... . ... ... . . ... . . .. .. . . . ... . . .. . .... .... .... ...... ...... ... .... .... ... ...... ... ..... ... ... ...... ... ........ ..... .......... ... ........... ............. ... ....... ................... ... ........ ............. .. .. .... .................. ........................................................................................................................... z dr r r sin ϑ dϕ ϕ dz r y ϕ x Kugelkoordinaten dρ ρ ϑ y . ...... ....... .......... .. ... ........... ..... . . . . . ... . . . . . . . . . . . . .... ................. .... . . ....... .. ... .. . . . . .......... . ... .................... . . .............. ........... .... . ... . ... .............. . . . . . . . . . . . . . . . . . . ... . ....... . .............. ... .. . . ... .. . .... . ... . . . . . . . . . . ... .. ..... . . . . . . . . . . .. .. .. . . . . . .. .. .... . . . .. .... . . .... .......... ..... . . . .. .... .. .... . . . . . .... . ........... ..... . . . .. ... ....... ..... .... ........ ... .......... . ....... . . . . . . ... ........ ........... . . . . . . . . . . . . ... ....... ... ....... ....................................... . .............................................................................................. z r dϑ ρ dϕ x Zylinderkoordinaten jeweils mit Volumenelement dV Spezielle orthogonale Koordinatensysteme Kugelkoordinaten sind die Koordinaten r, ϑ und ϕ, der Zusammenhang mit den kartesischen Koordinaten ist gegeben durch x = y = z = r sin ϑ cos ϕ r sin ϑ sin ϕ r cos ϑ. Metrische Koeffizienten: gr = 1 gϑ = r gϕ = r sin ϑ und damit die Einheitsvektoren: ~er = ~eϑ = ~eϕ = 1 ∂~r = sin ϑ cos ϕ · ~ex + sin ϑ sin ϕ · ~ey + cos ϑ · ~ez 1 ∂r 1 ∂~r = cos ϑ cos ϕ · ~ex + cos ϑ sin ϕ · ~ey − sin ϑ · ~ez r ∂ϑ 1 ∂~r = − sin ϕ · ~ex + cos ϕ · ~ey + 0 · ~ez r sin ϑ ∂ϕ Oder die kartesischen Vektoren ausgedrückt durch Vektoren in Kugelkoordinaten: ~ex ~ey = ~ex · (~er , ~eϑ , ~eϕ ) = sin ϑ cos ϕ · ~er + cos ϑ cos ϕ · ~eϑ − sin ϕ · ~eϕ = ~ey · (~er , ~eϑ , ~eϕ ) = sin ϑ sin ϕ · ~er + cos ϑ sin ϕ · ~eϑ + cos ϕ · ~eϕ ~ez = ~ez · (~er , ~eϑ , ~eϕ) = cos ϑ · ~er − sin ϑ · ~eϑ + 0 · ~eϕ Volumenelement: dV = dx dy dz = r 2 dr sin ϑ dϑ dϕ = −r 2 dr d (cos ϑ) dϕ Vektordifferentialoperatoren: (grad φ)r = ∂φ ∂r ~= div A (grad φ)ϑ = 1 ∂φ r ∂ϑ (grad φ)ϕ = 1 ∂φ r sin ϑ ∂ϕ 1 ∂(sin ϑAϑ ) 1 ∂Aϕ 1 ∂(r 2 Ar ) + + r2 ∂r r sin ϑ ∂ϑ r sin ϑ ∂ϕ ~ rot A 1 ∂Aϑ 1 ∂(sin ϑAϕ ) − r sin ϑ ∂ϑ r sin ϑ ∂ϕ 1 ∂(rAϕ ) 1 ∂Ar ~ − = rot A r sin ϑ ∂ϕ r ∂r ϑ 1 ∂(rAϑ ) 1 ∂Ar ~ − = rot A r ∂r r ∂ϑ ϕ ∂2φ 1 ∂ ∂φ 1 ∂φ 1 ∂ r2 + 2 sin ϑ + 2 2 ∆φ = 2 r ∂r ∂r r sin ϑ ∂ϑ ∂ϑ r sin ϑ ∂ϕ2 = r Zylinderkoordinaten sind die Koordinaten ρ, ϕ und z. Der Zusammenhang mit den kartesischen Koordinaten ist gegeben durch x = y = ρ cos ϕ ρ sin ϕ z z. = Metrische Koeffizienten: gρ = 1 gϕ = ρ gz = 1 und damit die Einheitsvektoren: ~eρ = ~eϕ = ~ez = 1 ∂~r = cos ϕ · ~ex + sin ϕ · ~ey + 0 · ~ez 1 ∂ρ 1 ∂~r = sin ϕ · ~ex + cos ϕ · ~ey + 0 · ~ez ρ ∂ϕ 1 ∂~r = 0 · ~ex + 0 · ~ey + 1 · ~ez 1 ∂z Volumenelement: dV = dx dy dz = ρ dρ dϕ dz Vektordifferentialoperatoren: (grad φ)ρ = ∂φ ∂ρ (grad φ)ϕ = 1 ∂φ ρ ∂ϕ (grad φ)z = ∂φ ∂z ∂Az 1 ∂(ρAρ ) 1 ∂Aϕ + + ρ ∂ρ ρ ∂ϕ ∂z ∂Az ∂Aρ ~ ~ = 1 ∂(ρAϕ ) − 1 ∂Aρ rot A rot A − = ∂z ∂ρ ρ ∂ρ ρ ∂ϕ ϕ z 2 2 ∂φ 1 ∂ φ ∂ φ 1 ∂ ρ + 2 + 2 ∆φ = ρ ∂ρ ∂ρ ρ ∂ϕ2 ∂z div φ = ~ = 1 ∂Az − ∂Aϕ rot A ρ ∂ϕ ∂z ρ 11.8 Greensche Sätze ~ (dabei ist φ ein skalares und A ~ ein vektorielles Feld) gilt Für die Divergenz des Vektorfeldes φA ~ = (grad φ) · A ~ + φ div A. ~ div φA In dieser Gleichung steht rechts ein Skalarprodukt von zwei Vektorfeldern und ein Produkt von zwei skalaren Feldern. Das Integral des ganzen Ausdrucks über ein Volumen V ist ZZZ h ZZ Z i ~ dV = ~ + φ div A ~ dV. div φA (grad φ) · A V V Die Anwendung des Gaußschen Satzes auf die linke Seite ergibt (S ist die Oberfläche des Volumens V ): Z ZZ h ZZ i ~ dS ~= ~ + φ div A ~ dV. (grad φ) · A φA S V ~ wird der Gradient des skalaren Feldes ψ gewählt: A ~ = grad ψ. Für die Divergenz Für das vektorielle Feld A ~ = div grad ψ = ∆ψ. Einsetzen dieses Feldes liefert den dieses Feldes gilt: div A ersten Greenschen Satz: ZZ Z ZZ ~= [(grad φ) · (grad ψ) + φ∆ψ] dV. φ (grad ψ) dS S oder V Z Z Z h ZZ i ~ ~= ~ ~ dS ∇φ · ∇ψ + φ∆ψ dV. φ ∇ψ S V Durch Vertauschen von φ und ψ erhält man ZZ Z ZZ ~ [(grad ψ) · (grad φ) + ψ∆φ] dV ψ (grad φ) dS = S V und durch Subtraktion der vorigen Gleichung den zweiten Greenschen Satz: Z ZZ ZZ ~= [ψ∆φ − φ∆ψ] dV. [ψ grad φ − φ grad ψ] dS S oder V Z ZZ ZZ h i ~ ~ ~ [ψ∆φ − φ∆ψ] dV. ψ∇φ − φ∇ψ dS = S 11.9 V Potentiale Als Potential bezeichnet man eine Zustandsfunktion, die von mehreren unabhängigen Variablen abhängen kann und die durch partielle Differentiation nach diesen Variablen zu Größen mit eigener physikalischer Bedeutung umgewandelt wird. Eine Zustandsfunktion ist dabei eine Größe, die den Zustand des Systems charakterisiert und nicht vom Weg abhängt, auf dem dieser Zustand erreicht wurde. Ist das Potential durch eine skalare Funktion charakterisiert, so spricht man von einem skalaren Potential. Bilden mehrere skalare Potentiale die Komponenten eines Vektorfeldes, so spricht man von einem Vektorpotential. Als Tensorkomponenten angeordnet erhält man ein Tensorpotential. Bei lokalen Potentialen geht nur der Ort ein, dessen Zustand beschrieben wird. Bei nichtlokalen Potentialen ist der Zustand auch von den Koordinaten im übrigen Raum abhängig. Die Existenz des Potentials führt zu mehreren äquivalenten Aussagen, hier am Beispiel des skalaren Potentials erläutert: 1. Das Potential φ besitzt ein totales Differential dφ, denn für beliebig wählbare Punkte ~r0 , ~r ist Z ~ r dφ = φ(~r) − φ(~r0 ) ~ r0 ,C Das Ergebnis φ(~r) − φ(~r0 ) gilt für beliebige Integrationswege C, ist also nicht vom Integrationsweg abhängig. 2. Es existiert ein Feld F~ (z.B. ein Kraftfeld), das sich darstellen läßt als ~ = −grad φ F Wegen dφ = grad φ d~r ist diese Aussage äquivalent zu der in Absatz 1. Ist nur das Feld und nicht das Potential von physikalischer Bedeutung, dann ist die Integrationskonstante φ(~r0 ) (Absatz 1) frei wählbar. 3. Das Linienintegral R F~ (~r) d~r ist unabhängig vom Weg. Die Integration längs des beliebigen Wegs C liefert Z r ~ Z F~ (~r) d~r = − ~ r0 ,C Z ~ r ~ r grad φ d~r = ~ r0 ,C dφ = φ(~r) − φ(~r0 ) ~ r0 d.h. die Zirkulation Γ verschwindet für einen Weg C 0 , der von : ~r0 nach ~r und wieder zurück führt: I I ~ grad φ · d~r = 0. F · d~r = Γ=− C0 C0 Ist F~ eine Kraft, dann ist φ(~r) − φ(~r0 ) die Arbeit längs des Weges C. Sie ist nicht vom Weg, sondern nur von den Endpunkten abhängig. Beim Rückweg von ~r nach ~r0 wird die Energie zurückgewonnen. “F~ ist ein konservatives Feld” 4. F~ ist wirbelfrei. rot F~ = 0 dann gilt auch für das Integral über die Fläche S mit dem Rand C 0 Z I ~= 0= rot F~ dS F~ · d~r C0 S wie oben. Physikalische Anwendung und Poisson-Gleichung Beispiele für Potentiale Newtonsches Potential V =f Mm r Gravitationskraft F~ = - grad V Geschwindigkeit ~v = grad Φ Feldstärke ~ = - grad φ E Magnetfeld ~ = rot A ~ B Hydrodynamik, wirbelfreie Strömung = Potentialströmung: Geschwindigkeitspotential Φ = Φ(~r, t) Elektrostatisches Potential φ= Magnetisches Vektorpotential ~ = A(~ ~ r , t) A 1 q 4πε0 r Thermodynamische Potentiale (mit Temperatur T , Volumen V , Druck p, und Anzahl der Mole ni in einem Gemisch; µi ist das “chemische Potential”): ∂U ∂U ∂U , −p = , µ = ; Innere Energie U = U (S, V ) T = i ∂S V,ni ∂V S,ni ∂ni S,V,nj Enthalpie H = H(p, S) = U + pV T Freie Energie = F = F (T, V ) = U − T S −S = Freie Enthalpie G = G(T, p) = H − T S (Gibbssches Potential) −S = ∂H ∂S V,ni ∂F ∂T V,ni ∂G ∂T p,ni , , V = −p = V = , S,ni ∂F ∂V T ,ni , ∂H ∂p ∂G ∂p µi = µi = µi = , , T ,ni ∂H ∂ni ∂F ∂ni ∂G ∂ni ; S,p,nj ; T ,p,nj . T ,p,nj Ermittlung der Potentiale ~ r ) sind wirbelfrei; sie werden durch elektrische Ladungen q hervorgerufen, die die Elektrostatische Felder E(~ Quellen des elektrischen Feldes darstellen. Bei räumlich verteilten elektrischen Ladungen, die durch eine elektrische Ladungsdichte ρ(~r) beschrieben werden, ist die Divergenz des resultierenden elektrischen Feldes durch die Ladungsdichte gegeben. Im Vakuum gilt: ~ = ρ div E 0 ~ =0 rot E ~ als Gradient eines skalaren (0 = Permittivität des Vakuums). Bei der Darstellung des elektrischen Feldes E Potentials φ wird ein negatives Vorzeichen benutzt: ~ = − grad φ. E Einsetzen in die Divergenz-Gleichung ergibt die Poisson-Gleichung: div grad φ = ∆φ = − ρ . 0 Bei gegebener elektrischer Ladungsdichte ρ(~r 0 ) ergibt sich das Potential φ(~r) aus der Poisson-Gleichung durch Integration über das die gesamte Ladung umfassende Volumen: ZZ Z ρ(~r 0 ) dV 0 1 . φ(~r) = 4π0 |~r − ~r 0 | Diese Gleichung stellt eine Verallgemeinerung der entsprechenden Formel für das Potential am Ort ~r dar, wenn sich eine Punktladung q am Ort ~r 0 befindet: φ(~r) = ...................................... .. ... ... .. ... ................................... .... .. ... .. ... .... ... ..... .. 0 ........................................ .................... ........ ..................... . . . . . . . . . . . . . . . . . . . . . . . . ... . ..................... ... .............................. ... ........... .. ........ .. .... . . .... ... ..... ..... ... 0 .. .... .... .. ..... .... ... ..... . . ..... ... .... .. .. .......................................... .. ... .. .. ~r − r~ ~r r~ q 1 . 4π0 |~r − ~r 0 | dV 0 ~r − r~ 0 . ..................... ................... .... ................... ......... .................. . . . . . . . . . . . . . . . . . . . . . . . . . ................. ... ........ .......... ... .... ... ..... .. ..... . .... ... 0 .... ... ..... ..... .... .... .... . . . .... .. .. ..... .... ........................................... .. ... .. .. ~r hq r~ Formal ergibt sich die Lösung der Poisson-Gleichung wie folgt. In dem zweiten Greenschen Satz wird speziell ψ = 1/r gewählt. Bei dieser Abhängigkeit gilt (bei r 6= 0) grad(1/r) = −~ur /r 2 und ∆(1/r) = 0. Einsetzen in den zweiten Greenschen Satz liefert ZZZ ZZ ~ur 1 1 grad φ + 2 φ · ~n dS = ∆φ dV. r S r V r Für ∆φ im rechten Integral kann gemäß der Poisson-Gleichung −ρ/0 eingesetzt werden. Bei der Integration des linken Integrals über den gesamten Raum wird angenommen, daß das Volumen nach außen durch eine ins Unendliche strebende Fläche S begrenzt wird, und nach innen durch die Fläche K einer Kugel begrenzt wird, deren Radius r0 gegen Null geht. Für eine endliche Ladungsmenge nimmt das Potential φ für große Werte von r sicher mindestens porportional zu 1/r ab. Daher verschwindet das Integral über die Fläche S, denn der Integrand nimmt mindestens proportional zu 1/r 3 ab, die Integrationsfläche dagegen verhält sich wie r2 . Die Kugelfläche K (Fläche = 4πr02 ) um den Aufpunkt liefert dagegen einen endlichen Beitrag: für die beiden Summanden im Integranden gilt 1 ∂φ 1 ~ur 1 grad φ · ~n ⇒ − φ · ~n ⇒ − 2 (φ)r=r0 2 r r0 ∂r r=r0 r r0 Da weder φ noch ∂φ/∂r am Aufpunkt r = 0 unendlich werden, erhält man im Limes r0 → 0 nur von dem zweiten Summanden einen nicht verschwindenden Beitrag −4π(φ)r=0 und insgesamt ZZ Z ρ dV. 4π (φ)r=0 = 0 r Bezeichnet man den Ortsvektor des Aufpunktes (r = 0) nun mit ~r und den Ortsvektor des Integrationspunktes mit ~r 0 , so erhält man ZZZ ρ(~r 0 ) dV 0 1 φ(~r) = 4π0 |~r − ~r 0 | als Lösung der Poisson-Gleichung. Vektorielles Potential ~ r ) heißt vektorielles Potential des Vektorfeldes B(~ ~ r ), wenn gilt: Das Feld A(~ ~ r ) = rot A(~ ~ r ). B(~ ~ r ) ist die Quellenfreiheit von B(~ ~ r ): Voraussetzung für die Definition eines vektoriellen Potentials A(~ ~ r ) = 0. div B(~ Diese Eigenschaft hat ein Wirbelfeld, denn es gilt ~ r ) ≡ 0. div rot A(~ ~ r ) kann der Gradient eines beliebigen skalaren Feldes χ addiert werden (siehe unten). Zu dem Vektorpotential A(~ ~ r ) werden durch stationäre elektrische Ströme verurPhysikalische Anwendung: Statische Magnetfelder B(~ sacht, die die Wirbel des magnetischen Feldes darstellen, das quellenfrei ist. Wird die elektrische Stromdichte mit ~j bezeichnet, so gilt im Vakuum: ~ =0 div B ~ = µ0~j rot B ~ = rot A ~ 0 erfüllenden Feld A ~ 0 kann noch ein (µ0 = Permeabilität des Vakuums). Zu einem die Gleichung B beliebiges Gradientenfeld grad χ addiert werden, ~ = rot A ~ 0 + grad χ , B ~ 0 + grad χ denn rot grad χ = 0. Bei der Coulomb-Eichung wird ein skalares Feld χ so gewählt, daß das Feld A quellenfrei ist: ~ 0 + ∆χ = 0. ~ 0 + grad χ = div A div A Dies läßt sich erreichen durch die Wahl ~ 0. ∆χ = − div A ~ folgt aus der Gleichung rot B ~ = µ0~j: Für das Vektorpotential A µ0~j ~ = rot rot A ~ × ∇ ~ ×A ~ =∇ ~ ∇ ~A ~ − ∆A ~ = ∇ ~ − ∆A. ~ = grad div A ~ sodaß man die Beziehung In dieser Gleichung verschwindet bei der Coulomb-Eichung div A, ~ = −µ0~j ∆A ~ erhält. Für jede Komponente von A ~ gilt also die Poissonzwischen der Stromdichte ~j und dem Vektorpotential A Gleichung: ∆Ay (~r) = −µ0 jy ∆Az (~r) = −µ0 jz ∆Ax(~r) = −µ0 jx Die Lösung ist daher analog zum Fall des skalaren Potentials gegeben durch ZZZ jx (~r 0 ) dV 0 µ0 etc. Ax (~r) = 4π |~r − ~r 0 | und in Vektorform ~ r ) = µ0 A(~ 4π Z ZZ ~ 0 j(~r ) dV 0 . |~r − ~r 0 | Wird die Stromdichte über den Querschnitt des stromführenden Leiters integriert, so erhält man den Strom ..... ...... ......... 0 ............ ................... ................................................................................ ......................... ... .... . . ................. . . . ... ............. ......... .... ........... .... .... .......... .... .... ........ . . . .... ...... ... 0 . . . .... .. . . . ... ... . . . . ...... .. . . . . . . . 0 ..... ........ .... . .... ............... ... ................. ... ............. . . . . . . . . . . . . . . .. ....... ............. ... ...... ............. ... .... ............ ... .... .................... ................................................. ... ... .... ~ d` ~r − r~ r~ ~r R ~ Deshalb gilt ~j dV 0 = I d~ I = ~j · df. `0 . Das Leiterelement d~`0 am Ort d~r 0 hat die Richtung der Stromdichte. Die Integration wird über die gesamte Länge ` des den Strom I führenden Leiters ausgeführt. Damit wird ~ r ) = µ0 I A(~ 4π Z ` d~`0 |~r − ~r 0 | ~ erhält man durch Bildung der Rotation: und für B ~ r ) = rot A(~ ~ r ) = µ0 I B(~ 4π Z ~ × ∇ ` d~`0 . |~r − ~r 0 | Dabei ist zu beachten, daß der Nabla - Operator nur auf ~r, aber nicht auf ~r 0 bzw. d~` wirkt. Unter Benutzung von (~r − ~r 0 ) 1 = − grad |~r − ~r 0 | |~r − ~r 0 |3 erhält man schließlich das Gesetz von Biot-Savart für das Magnetfeld eines Stromes: ~ r ) = µ0 I B(~ 4π Z ` d~`0 × (~r − ~r 0 ) . |~r − ~r 0 |3 Eindeutige Vektorfelder ~ = rot A ~ hergeleitete Vektorfeld B ~ wurde erst mit der RandbeDas im letzen Abschnitt unter der Bedingung B ~ dingung div B = 0 eindeutig. Allgemein gilt der Satz: Ein Vektorpotential ist in einem Gebiet eindeutig, wenn seine Divergenz und seine Rotation dort gegeben und wenn seine Normalkomponente auf dem Rand bekannt ist. (Statt der Normalkomponente kann ein anderer vollständiger Satz von Randbedingungen gegeben sein.) ~2 seien Beweis: Angenommen, Divergenz, Rotation und Normalkomponente zweier Vektorfelder V~1 und V ~V ~2 = ρ, ∇ ~ ~ ∇ × V~2 = B, V2n = V1n , ~V ~1 = ρ ∇ ~ ~ ~1 = B ∇×V ~1 (~rmax ) · ~n(~rmax ) V1n = V ~1 ~ =V ~2 − V dann gilt für das Vektorfeld W ~W ~ ∇ ~ ×W ~ ∇ = = 0 0 und Wn = 0. Die Wirbelfreiheit erlaubt zu schreiben (Vorzeichen ist Konvention): ~ = −∇ϕ ~ W und die Quellenfreiheit ergibt: ~ ∇ϕ) ~ ∇( = ∆ϕ = 0. Der 1. Greensche Satz mit ψ = φ = ϕ liefert Z ZZ 2 ZZ ~ · ~n dS = ~ + ϕ∆ϕ dV. ∇ϕ − ϕW S V ~ · ~n = Wn ergibt die linke Seite gleich Null und deshalb Wegen W ZZZ ZZZ ZZ ~ 2 dV = ~ 2 dV. (∇ϕ) W 0 = ϕWn dS = S V V ~ =V ~2 − V ~1 = 0 sein, d. h. V ~1 ist eindeutig. ~ 2 ≥ 0 ist, muß W Weil W Helmholtzsches Theorem ~ gegeben durch Quellenstärke ρ und Wirbelstärke ~j, die beide im Unendlichen verIst ein Vektorpotential V ~ und einem reinen Wirbelfeld ∇ ~ ×A ~ zerlegt schwinden, so kann es in eine Summe aus einem Gradientenfeld −∇ϕ werden. Beweis: Der Satz sagt aus, daß ~ = −∇ϕ ~ +∇ ~ ×A ~ V wobei ~V ~ ∇ ~ ×V ~ ∇ ~ ~ ∇A = ρ = ~j = 0. und ~ eindeutig bestimmt. Die Ausführung der letzten Nach dem vorhergehenden Satz ist das Vektorpotential V ~ und Gleichungen führen auf Poisson - Gleichungen, deren Lösungen, wie oben gezeigt, die Potentiale ϕ und A ~ ergeben. damit auch V