pdf-file - id.ethz.ch
Werbung

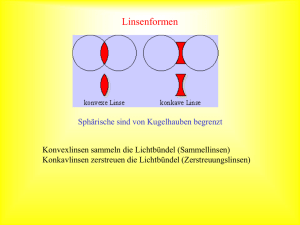
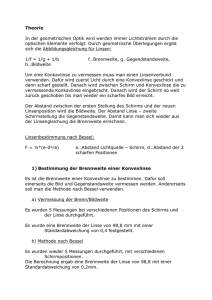
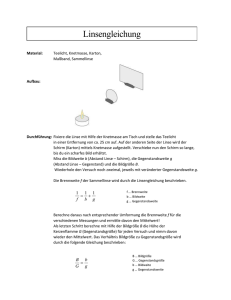
Die photographische Kamera viele Abbildungen von Lana Lazebnik, Fredo Durand, Steve Seitz, Alyosha Efros Abbildung ! • • Wie kann das von einem Objekt reflektierte Licht aufgezeichnet werden? ! Erster Versuch ! • eine lichtempfindliche Fläche wird vor das Objekt gestellt • Wie sieht die resultierende Abbildung aus? Abbildung ! • Wie kann das von einem Objekt reflektierte Licht aufgezeichnet werden? ! • Zweiter Versuch ! • Punkte sollen auf Punkte abgebildet werden → pro Punkt nur ein Strahl • zwischen Objekt und Bildebene wird eine Blende angebracht Camera Obscura • Das Prinzip ist schon lange bekannt • in China: Mo-Ti (470-390 BCE) • in Europa: Aristoteles (384-322 BCE) • ab dem späten Mittelalter als Zeichenhilfe und wissenschaftliches Instrument • Roger Bacon (1214-1294) • Leonardo da Vinci (1452-1519) • Johannes Kepler (1571-1630) Gemma Frisius, 1558 Einfluss der Blende http://www.debevec.org/Pinhole/ Einfluss der Blende • Wie gross soll das Loch sein? • kleine Öffnung → schmaler Lichtkegel → scharfes Bild • Grenze: zu wenig Lichtenergie, Beugung Einfluss der Blende Verwendung einer Linse • Lichtstrahlen werden gebrochen ! • Strahlen von einem Objektpunkt treffen sich wieder in einem Punkt Verwendung einer Linse focal point f • Lichtstrahlen werden gebrochen ! • Strahlen von einem Objektpunkt treffen sich wieder in einem Punkt • parallele Strahlen treffen sich im Brennpunkt Verwendung einer Linse “blur circle” • Lichtstrahlen werden gebrochen ! • Abstand, in dem sich die Strahlen wieder treffen, hängt vom Abstand Objekt-Linse ab • nur in einem bestimmten Abstand ist die Abbildung “scharf” Linsengleichung • geometrische Optik • Annahme: dünne Linse → Hauptebenen fallen zusammen • aus ähnlichen Dreiecken y0 D0 = y D D’ y0 D0 f = y f D0 D0 f = D f D f y y’ Linsengleichung • geometrische Optik • Punkte, die die Gleichung erfüllen, werden scharf abgebildet D0 D0 f = D f D’ f | 1 · 0 D D 1 1 1 + = D0 D f Tiefenschärfe http://www.cambridgeincolour.com/tutorials/depth-of-field.htm Tiefenschärfe •Die Tiefenschärfe hängt von der Blende ab • kleinere Blende → grössere Tiefenschärfe • aber: weniger Licht → längere Belichtungszeit notwendig Tiefenschärfe Öffnungswinkel Öffnungswinkel Öffnungswinkel f f • Der Öffnungswinkel ist abhängig von • • • der Brennweite f der Grösse des lichtempfindlichen Sensors ! ! ! d d = tan = tan 2f 2f kürzere Brennweite → grösserer Öffnungswinkel Brennweite Weitwinkel, kurze Brennweite Objekt nahe an Kamera Schmalwinkel, lange Brennweite Objekt weit entfernt Brennweite • Perspektivische Verzerrung abhängig von der Brennweite Weitwinkel Normalwinkel Teleobjektiv Linsenfehler • Radialverzeichnung • bei realen Linsensystemen ist die Vergrösserung vom Abstand zur optischen Achse abhängig keine Verzeichnung kissenförmig (pin cushion) tonnenförmig (barrel) Linsenfehler • Chromatische Aberration • • • Brechungsindex its abhängig von Wellenlänge es gibt keine “korrekte” Brennweite für alle Farben wird durch entsprechendes Linsendesign klein gehalten image center image border Linsenfehler • Astigmatismus • • • • korrekte Brennweite hängt vom Abstand zur optischen Achse ab Unschärfe ist anisotrop, stärker an den Bildrändern wird durch entsprechendes Linsendesign klein gehalten stärker für Weitwinkelobjektive Linsenfehler • Sphärische Aberration • • • • • sphärische Linsen sind optisch nicht ideal Schnittpunkt für Strahlen vom Linsenrand weiter innen es kommt zu Unschärfe bei jeder Entfernung korrekte Brennweite hängt von Blendenöffnung ab wird durch entsprechendes Linsendesign klein gehalten Linsenfehler • Vignettierung • • • • abnehmende Helligkeit gegen Bildränder am Rand der Linsen geht mehr Licht verloren natürlicher Helligkeitsverlust durch flacheren Einfallswinkel oft reduzierte Sensorempfindlichkeit mit flacherem Einfallswinkel Digitale Sensoren • Sensor ist ein Raster von kleinen Photodioden • die einzelnen Dioden wandeln einfallende Photonen in Elektronen um • die elektrischen Ladung erzeugt elektrische Spannung • zwei Typen – Charge Coupled Device (CCD) – Complementary metal oxide semiconductor (CMOS) Sensortechnologie • CCD (charge coupled device) • die von der Photodiode erzeugte Ladung wird von Pixel zu Pixel über den Chip transportiert und an einer Ecke ausgelesen - d.h. die resultierende Spannung wird gemessen • CMOS (complementary metal-oxide semi-conductor) • Ladung wird an jedem einzelnen Pixel direkt in Spannung umgewandelt, verstärkt und ausgelesen • Digitalisierung • in beiden Fällen wird die gemessene Spannung mit einem analog-digital Wandler (ADC) in einen Helligkeitswert konvertiert Farbe • Bayer Filter • • die fehlenden Messwerte jedes Kanals werden interpoliert (demosaicking) mehr grüne Pixel, weil das menschliche Auge bei ca. 550nm am empfindlichsten ist Empfindlichkeit des visuellen Systems Farbmoiré Farbmoiré • Sampling-Problem • Demosaicking geht davon aus, dass räumliche Strukturen niedrigere Frequenz haben als das Pixelraster • sonst werden immer dieselben Farben dunkel/hell abgebildet → Intensitätsmuster als Farbmuster fehlinterpretiert Dreichip-Kameras • Aufspaltung der Farbanteile durch Prismen • drei getrennte Sensoren • jeder Kanal hat an jeder Rasterposition einen Messwert • keine Interpolationsartefakte, bessere Farbqualität CCD(R) CCD(G) CCD(B) Separate Kameras • Bei Luftbildkameras • verschiedene “Kameraköpfe” - panchromatisch (hochauflösend) R,G,B,IR (niedrigere Auflösung) • verschiedene Sensorzeilen grün (29 Mpix) blau (29 Mpix) pan (260 MPix) rot (29 Mpix) infrarot (29 Mpix) Luftbildkameras • erst seit ca. 10 Jahren digital • Bildaufnahme war der letzte analoge Schritt der Photogrammetrie • zuvor wurden analoge Filme gescannt • Grund sind technische Grenzen bei der Sensorerzeugung Luftbildkameras • Vorteile der digitalen Aufnahme • • • • Kostenersparnis: Film, Entwicklung, Scannen entfällt kein Mehraufwand für mehr Bilder → höhere Genauigkeit höhere radiometrische Qualität → höhere Genauigkeit mehr Spektralkanäle: keine Beschränkung durch Filmherstellung Analog, GSD = 20cm Digital, GSD = 20cm (Leica ADS 40) Luftbildkameras • Mehr Bilder • kein Mehraufwand für mehr Bilder → höhere Genauigkeit - weniger Verdeckungen - grössere Redundanz Luftbildkameras • Radiometrische Qualität • höhere radiometrische Qualität → höhere Genauigkeit - genauere Lokalisierung - bessere Bildinterpretation Film GSD=0.5m R=265µm Ultracam GSD=0.4m R=145µm Luftbildkameras • Radiometrische Qualität • Auflösung >12 bit (4096 Helligkeitsstufen) Luftbildkameras • Mehr Spektralkanäle • Film hat nur drei Schichten (RGB, CIR) • in digitalen Geräten pro Farbe eine eigene Kamera • Farbinformation hat niedrigere Auflösung → pan-sharpening panchromatisch RGB pan-sharpened CIR pan-sharpened Luftbildkameras • Pan-sharpening • Fusion von feiner aufgelöstem panchromatischem Bild und gröber aufgelöstem Farbbild Luftbildkameras • Spektrale Empfindlichkeit • Kanäle sind bei digitaler Technologie schärfer abgegrenzt • Räumliche Auflösung der Farbkanäle deutlich schlechter • • pan-sharpening kann zu Farbverschiebungen an Kanten führen Ausnahme: Zeilenkameras Luftbildkameras - Beispiele • Microsoft (Vexcel) Ultracam Eagle • • • hochauflösendes Bild aus 9 Teilkacheln zusammengesetzt 262 MPix panchromatisch zusätzliche Kameras für R, G, B, IR Luftbildkameras - Beispiele • Microsoft (Vexcel) Ultracam Eagle “master-cone” legt die Bildgeometrie fest Bildaufnahme wird entsprechend zeitversetzt Teilbilder werden mittels digitaler Bildverarbeitung registriert zwei verschiedene Brennweiten: 80 / 210 mm Flugrichtung 20 010 Pixel (x) 13 800 Pixel (y) • • • • Luftbildkameras - Beispiele • Microsoft (Vexcel) Ultracam Eagle Luftbildkameras - Beispiele • Zeiss/Intergraph DMC II • • • monolithischer CCD-chip 235 / 250 MPix Brennweite 112 mm Luftbildkameras - Beispiele • Analoge Luftbildkameras • Zeiss RMK-Top • Leica RC30 Luftbildkameras - Beispiele • Leica ADS 80 Dreizeilenkamera • 12’000 Pixel / Zeile • Streifenbreite (swath angle) 64º • 3x panchromatisch, Blickrichtung -16º, 0º, 40º • Nadir hat 2 verschobene Zeilen zur Erhöhung der Auflösung (“super-resolution”) • 2x R, G, B, NIR • radiometrische Auflösung 12 bit Luftbildkameras - Beispiele • Mittelformatkameras • ca. 40-60 MPix • mehrere Hersteller • Anwendungen: geringere Genauigkeit/Auflösung, kleine Projekte, UAVs, Kombination mit LiDAR, ... IGI DigiCAM Z/I RMK D Luftbildkameras - Zubehör • GNSS/IMU Einheit • Navigation, automatische Auslösung • Messung der Orientierungsparameter • Genauigkeit ca. 3x niedriger als indirekte Sensororientierung Applanix POSAV Luftbildkameras - Zubehör • Integriertes System • Applanix DSS • Anwendung: “out-of-the-box” Orthophotoerzeugung mit moderater Genauigkeit (direkte Georeferenzierung)