Vorlesung 3
Werbung

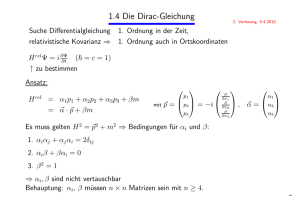
Dirac Gl. relativistischer Fall
Freie Dirac Gleichung (ohne Feld):
(ℏ = c = 1 )
∂Ψ
= [~
α · p~ + mβ] Ψ
∂t
!
0 ~σ
α
~=
,
~σ 0
iℏ
Lösungsansatz:
1
Ψ(x) =
β=
↑ 2 × 2 Pauli Matrizen
ϕ(p)
χ(p)
!
1 0
0 −1
↓ pos. Energie
e∓ipx ← ∓i(Et − p~ · ~x)
↑ neg. Energie
Lösungen ∼ e−ipx (pos. Energie):
!
!
# "
"
0
~σ · p~
ϕ
∂
i
+
e−ipx =
∂t
~σ · p~ 0
χ
(E − m) ϕ − ~σ · p~ χ = 0
(E + m) χ − ~σ · p~ ϕ = 0
֒→ χ =
~σ · p~
ϕ;
E+m
!
~σ · p~ =
m
0
0
−m
gekoppelte Gl. für ϕ, χ
pz
px + ipy
px − ipy
−pz
!
!#
ϕ
χ
!
e−ipx
Obere Gl. damit automatisch erfüllt:
~σ · p~
ϕ=0
(E − m)ϕ − (~σ · p~)
E+m
|
{z
}
p
~2
E+m ϕ
Wähle ϕ1 = N
1
0
2
u1 (p) = N
!
;
=
ϕ2 = N
1
0
pz
E+m
px +ipy
E+m
,
E 2 −m2
E+m ϕ
0
1
!
= (E − m)ϕ
; ⇒ Lsg. der Dirac-Gl.: u1 (p)e−ipx , u2 (p)e−ipx
0
1
u2 (p) = N
px −ipy
E+m
−pz
E+m
Lösungen negativer Energie E = −E < 0: v1 (p)e+ipx , v2 (p)e+ipx
(−E − m) ϕ + ~σ · p~ χ = 0
(−E + m) χ + ~σ · p~ ϕ = 0
ϕ=
~σ · p~
χ
E+m
v1 (p) = N
Hier: wähle χ1 = N
px −ipy
E+m
−pz
E+m
0
1
,
!
0
, χ2 = N
1
pz
v2 (p) = N
E+m
px +ipy
E+m
1
0
1
0
!
Normierung:
Ψ+ Ψ −→ u+ u, v + v
3
Beliebteste Möglichkeiten
für N :
q
E
+
a) NBjorken,Drell = E+m
→
u
u
=
m
√ 2m
b) NEichtheorien = E + m → u+ u = 2E
(=1 im Ruhesystem)
(=2m im Ruhesystem)
Komplette Lösungen:
Ψ+ (x) = u1,2 (p)e−iEte+i~p·~x
Ψ− (x) = v1,2 (p)e+iEte−i~p·~x
→ Problem: neg. Energie!
Interpretation der Lösungen negativer Energie:
1 Dirac-See:
Elektronen
Alle negativen Energieniveaus besetzt ≡ “See” von
4
→ erklärt γ → e+ e− Paarerzeugung (Eγ > 2me c2 )
Entdeckung der Positronen 1932 durch C.D. Anderson
2 Feynman
- Stückelberg Interpretation (um 1934)
Wellenfunktion Energie< 0,
Teilchen e− ,
läuft rückwärts in der Zeit
Wellenfunktion Energie< 0,
Antiteilchen e+ ,
läuft vorwärts in der Zeit
≡
5
≡
Moderne Schreibweise der Diracgl. mit γ Matrizen
Vierervektoren:
kontravariante (wie xµ ) und kovariante (wie xµ )
pµ = (E, px , py , pz ) = (E, p1 , p2 , p3 ) = (E, p~),
µ = 0, 1, 2, 3
X
pµ = (E, −~p)
pµ pµ = E 2 − p~ 2 = m2 Lorentz-invariant
µ
6
Metrischer Tensor gµν :
gµν = g
µν
=
1 0
0
0
0 −1 0
0
0 0 −1 0
0 0
0 −1
P3
pµ = gµν p := ν=0 gµν pν
↑ Einsteinsche Summenkonvention
ν
Lorentz invariantes Skalarprodukt von 4-Vektoren:
ab = aµ bµ = aµ bµ = aµ gµν bν = a0 b0 − ~a · ~b
a2 > 0 zeitartig, a2 = 0 lichtartig, a2 < 0 raumartig
Lorentz-Trafo:
x′ν = aνµ xµ
γ
0 0 −γβ
0
1 0 0
ν
LT in z-Richtung: aµ =
0 1 0
0
−γβ 0 0 γ
7
Beispiele für Vierervektoren:
Zeit-Ort
xµ = (t, ~x)
pµ = (E, p~)
~
elektromagn. Viererpotential Aµ = (Φ, A)
Viererstromdichte
j µ = (ρ, ~j)
~
Gradient
∂ µ = ( ∂ , −∇)
Energie-Impuls
∂t
(weil ∂ µ =
∂
)
∂xµ
Diracgleichung und γ-Matrizen
γ 0 = β, γ 1 = βα1 , γ 2 = βα2 , γ 3 = βα3
Dirac-Pauli Darstellung:
!
!
1 0
0 σi
0
i
γ =
, γ =
,
0 1
−σi 0
i = 1, 2, 3
8
β· Diracgleichung (ℏ = c = 1)
∂Ψ
∂Ψ
∂Ψ
∂Ψ
i β
+ βα2
+ βα3
+ − mβ 2 Ψ = 0
+ βα1
∂t
∂x1
∂x3
∂x3
0 ∂
1 ∂
2 ∂
3 ∂
+i γ
− m1 Ψ = 0
+γ
+γ
+γ
∂t
∂x1
∂x2
∂x3
γ µ = (γ 0 , γ 1 , γ 2 , γ 3 ) Achtung! Ist kein 4-Vektor, γ µ sind in jedem Lorentzsystem gleich
(iγ µ ∂µ − m)Ψ(x) = 0
Diracgleichung
Eigensch. der γ-Matrizen:
γ µ γ ν + γ ν γ µ = 2g µν · 1
(γ 0 )+ = γ 0
(γ 0 )2 = 1
9
(γ µ )+ = γ 0 γ µ γ 0
(γ k )+ = −γ k ,
(γ k )2 = −11
Weitere Abkürzungen:
6a ≡ γ µ aµ
dagger, slash
⇒ (i6∂ − m)Ψ = 0 Diracgleichung
k = 1, 2, 3
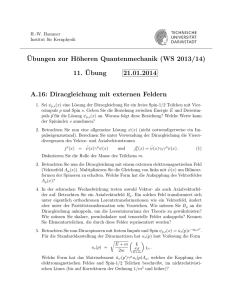
Dirac Gl. mit elektromagnetischem Feld Aµ
pµ = i∂µ
pµ − qAµ = i∂µ − qAµ
−→
Eichtheorie
∂µ → ∂µ + iqAµ
(iγ µ ∂µ − m)Ψ(x) = gγ µ Aµ Ψ(x)
(i6∂ − m)Ψ = q6AΨ
10
Adjungierter Spinor und Vierer-Stromdichte:
Def. Ψ̄ ≡ ψ + γ 0 adjungierter Spinor
Warum nützlich? Ψ+ Ψ = ρ, Wahrs.Dichte, transformiert bei LT ∼ E
Ψ̄Ψ ist ein Skalar, s. Übungsblatt 2.1
Def. j µ = Ψ̄γ µ ψ
j 0 = Ψ̄γ 0 Ψ = Ψ+ γ 0 γ 0 Ψ = Ψ+ Ψ = ρ,
j k = Ψ̄γ k Ψ = Ψ+ γ 0 γ k Ψ = Ψ+ ββαk Ψ = Ψ+ αk Ψ
|{z}
k=1,2,3
Diracgleichung für den adjungierten Spinor Ψ̄:
i∂µ Ψ̄γ µ + mΨ̄ = 0
Fragen und Antworten von der Stunde 13.4.2010:
• Man kann Teilchen mit
a) negativer Energie die sich rückwaerts in der Zeit ausbreiten behandeln wie
b) Antiteilchen mit positiver Energie die sich vorwärts in der Zeit ausbreiten.
Frage: ist es besser a) oder b) zu benutzen und gibt es irgenwelche Unterschiede?
Antwort: a) und b) sind absolut äquivalent und es gibt keine Unterschiede. Das sieht man z.B. wenn
man das Skalarprodukt von einem auslaufenden Teilchen mit negativer Energie φf = eiEf t−ip~f ·~x mit
einem einlaufenden Zustand mit positiver Energie φi = e−iEi t+ip~i ·~x bildet:
Z
Z
hφf |φi i = d3 xφ∗f (~x)φi ~x = d3 xe−iEf t+p~f ·~x e−iEi t+ip~i ·~x
≡
11
Z
d3 xe+i(−Ei )t−i(−p~i )·~x e−iEf t+p~f ·~x ≡ hφiEi →−Ei ,p~i →−p~i |φf−Ef →Ef ,−p~f →p~f i
D.h. Ein- und Auslaufen von Teilchen und Antiteilchen kann man gegeneinander austauschen wenn
man Energie und Impuls umdreht. (Nebenbei: Physikalische Observable werden immer durch solche
Skalarprodukte (Matrixelemente) beschrieben). Mehr dazu im Schmüserbuch Kapitel 3., S29 ff
!
~σ 0
• Wo kommt es her, dass S =
→ Die Paulimatrizen sind Repraesentanten der SU2
0 ~σ
Drehgruppe und charakterisieren in der Quantenmechanik den Spin von Spin 1/2 Teilchen s.
http : //en.wikipedia.org/wiki/P auli matrices Für die Diracspinoren müssen wir das noch auf die
Vierervektoren verallgemeinern, d.h. die Teilchen und Antiteilchen gleichzeitig beschreiben.
∂
~ sich wie kontravarianter Vierervektor verhält (d.h. wie xµ ).
, −∇)
• Beweis, dass ∂ µ = ∂x∂µ = ( ∂t
Wenn wir als Beispiel nehmen ∂ µ S mit S = xν xν = x0 x0 − x1 x1 − x2 x2 − x3 x3 (S ist ein
Lorentzskalar, d.h. invariant unter LTs) finden wir sofort: ∂ µ S = 2xµ = 2(x0 , x1 , x2 , x3 ) d.h. verhält
sich wie kontravarianter Vektor xµ . (Formaler Beweis auch über LT von ∂x∂µ möglich.)