Mikrowellen - Bauelemente und stehende Wellen in Koaxialkabeln
Werbung

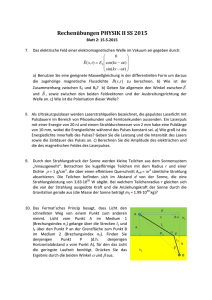
- Institut für Angewandte Physik - Experiment: Mikrowellen - Bauelemente und stehende Wellen in Koaxialkabeln Janis Benscheidt – Version 1.0 Jörg Imbrock – Version 1.1 26. Oktober 2010 Inhaltsverzeichnis Inhaltsverzeichnis 1 Einleitung 1.1 Hochfrequenztechnik zu Hause . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2 Ein wenig Geschichte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.3 Hilfseinheit Bel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Grundlagen der Leitungstheorie 2.1 Die stationären Leitungsgleichungen . . . . . . 2.2 Wellenwiderstand . . . . . . . . . . . . . . . . . 2.3 Reflexionskoeffizient . . . . . . . . . . . . . . . 2.4 Stehende Wellen . . . . . . . . . . . . . . . . . 2.5 Mehrfachreflexion . . . . . . . . . . . . . . . . . 2.6 Bauteile der Hochfrequenztechnik . . . . . . . . 2.6.1 Verschiedene homogene Doppelleitungen 2.6.2 Richtkoppler . . . . . . . . . . . . . . . 2.6.3 Zirkulator . . . . . . . . . . . . . . . . . 2.6.4 Isolator (Richtleitung) . . . . . . . . . . 2.6.5 Diode bzw. Detektor . . . . . . . . . . . 3 Das 3.1 3.2 3.3 3 3 3 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 5 6 6 7 8 10 10 12 13 14 14 Experiment Equipment . . . . . . . . . . . . . . . . . . . . . . Vorausgesetzte Kenntnisse . . . . . . . . . . . . . . Aufgaben . . . . . . . . . . . . . . . . . . . . . . . 3.3.1 Das Messequipment (Diode / Detektor) . . 3.3.2 Bauteile der Hochfrequenztechnik . . . . . . 3.3.3 Messen der stehenden Wellen / Resonanzen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 15 16 16 16 17 19 4 Quellenverzeichnis . . . . . . . . . . . 22 2 1.1 Hochfrequenztechnik zu Hause 1 Einleitung 1.1 Hochfrequenztechnik zu Hause Die Datenübertragung ist heute wohl jedem ein Begriff, vor allem bei Telefon, Internet und Fernsehen. Dies alles sind klassisch kabelgebundene Medien, die heute auch kabellos funktionieren. Wir beschäftigen uns hier mit der kabelgebundenen Variante, denn auch bei der Datenübertragung im Kabel steigen die Anforderungen immer weiter. Heute gilt es auch im Konsumerbereich immer mehr Daten, immer schneller und weiter zu übertragen. Begnügte man sich einst beim Internet mit einem 28k- oder 56k-Modem, muss es heute schon mindestens die 6 MBit/s oder besser die 50 MBit/s Internet-Leitung sein. Aber dies sind nicht die größten Datenmengen, welche heute in Haushalten übertragen werden. Als aktuelles Beispiel ist hier nur HDMI zu nennen, der neue Übertragungsstandard in der Unterhaltungsindustrie für Bild und Ton. In seiner aktuellen Version, HDMI 1.4, erlaubt er auf drei seriellen Übertragungskanälen eine Datenrate von 10,2 GBit/s, also pro Kanal eine Übertragungsrate von 3,4 GBit/s. Und dies ist sicher nicht das Ende. Selbstverständlich ist die Übertragung solch großer Datenmengen auch nur mit entsprechend hohen Trägerfrequenzen möglich. Somit wandert die Hoch-bzw. Höchstfrequenztechnik aus Industrie und Forschung zunehmends immer mehr in die Haushalte und gewinnt auch für den Anwender immer mehr an Bedeutung. 1.2 Ein wenig Geschichte Die Entdeckung von Christian Oerstedt (1820 ), dass die Elektrizität mit dem Magnetismus eng in Zusammenhang steht, erweiterte der Engländer Michael Faraday (1836/37 ) um die Theorie des elektrischen und des magnetischen Feldes. Er schaffte es allerdings nicht diese Theorie in eine Mathematische Form zu bringen. Dies gelang erst dem schottischen Mathematiker und Physiker James Clerk Maxwell (1864/65 ). Er entwickelte zu Beginn der 60er Jahre des 19. Jahrhunderts Abbildung 1.1: Die vier Maxwell-Gleichungen in differentieller Form auf einem T-Shirt einen Satz von Differentialgleichungen, welche heute als die "Maxwell-Gleichungen" bekannt sind. Diese beschreiben den Elektromagnetismus in seiner Gänze. Aus diesen Gleichungen sagte Maxwell auch die Existenz elektromagnetischer Wellen, welche sich im freien Raum (damals: 3 1.3 Hilfseinheit Bel im Äther) ausbreiten können, voraus. Diese konnte der deutsche Heinrich Hertz 22 Jahre später auch experimentell nachweisen. Hierzu sei nur das Stichwort "Hertz’scher Oszillator" genannt. Außerdem erkannte Maxwell an seinen Gleichungen, dass sich eine elektromagnetische Welle wie das Licht verhält. Er schloss daraus, dass das Licht auch eine elektromagnetische Welle ist. Dies zeigte Heinrich Hertz anhand von Reflexions- und Polarisationsexperimenten. 1.3 Hilfseinheit Bel In der Leitungstheorie geht es oft nicht um absolute sondern um relative Größen. Zudem haben sich logarithmische Einheiten hier oft als übersichtlicher bewährt. So wird das Relativmaß R in der Einheit Bel (B) angegeben. Sie ist nach Alexander Graham Bell benannte, der bei den ersten Schritten des Telefons maßgeblich beteiligt war. Das Bel gibt ein Verhältnis zweier Energiegrößen (hier meist die elektrische Leistung P ) im dekadischen Logarithmus an. Gebräuchlich ist heute das zehntel Bel, das Dezibel (dB). R = log10 P2 P1 P2 B = 10 · lg P1 dB (1.1) Mit P = U · I und U = Z · I gilt dem zufolge: R = 10 · lg U2 U1 2 dB = 20 · lg U2 U1 dB . (1.2) In Bel werden auch absolute Pegel (L) angegeben, um einen großen Bereich übersichtlich zu erfassen. Damit nun einen feste Größe mit einem Bel verbunden werden kann ist P2 eine feste Referenzgröße (Pref ): L = 10 · lg P Pref ! dB = 20 · lg U Uref ! dB . (1.3) So wird zum Beispiel auch der Leistungspegel in dBm angegeben, wie er an vielen wissenschaftlichen Geräten verwendet wird. Die Referenzgröße ist beim dBm genau 1 mW: LP = 10 · lg P = 10 P 1 mW LP 10 dBm · 1 dBm , (1.4) · 1 mW . (1.5) Tabelle 1.2 gibt eine Übersicht über typische Leistungspegel. Leistung in dBm 15 dBm 10 dBm 3 dBm 0 dBm -3 dBm -10 dBm -15 dBm -20 dBm Leistung ca. 31,6 10 ca. 2,0 1 ca. 0,50 0,10 ca. 0,03 0,01 in mW mW mW mW mW mW mW mW mW Abbildung 1.2: Leistungspegel in dBm und in mW 4 2.1 Die stationären Leitungsgleichungen 2 Grundlagen der Leitungstheorie Folgende Theorie ist den Maxwell-Gleichungen entnommen. Mit ihnen werden die Mikrowellen als elektromagnetische Wellen mit ihrem E- und B-Feld betrachtet. Für diese Felder müssen an Grenzflächen gewisse Bedingungen erfüllt sein. Die Größen des E- und B-Feldes lassen sich so auf die aus der Elektrotechnik bekannten Größen der Spannung U und der Stromstärke I reduzieren. Dies ist jedoch nur bei den hier behandelten transversalelektromagnetischen Leitern (TEMLeitern) möglich. TEM-Leiter erfordern immer einen Hin- und einen Rückleiter (=Doppelleiter). Betrachtet wird im folgenden also immer ein homogener Doppelleiter. Des Weiteren wird von stationären Zuständen ausgegangen. Einschwingvorgänge werden also vernachlässigt, so dass wir Strom und Spannung mit einer einfachen Zeitabhängigkeit darstellen können: I(x, t) = I(x) · eiωt U (x, t) = U (x) · eiωt . (2.1) Dies führt dazu, dass zeitliche Ableitungen von Spannung und Strom nur den Vorfaktor iω hinzufügen und somit die Lösungen stark vereinfachen. Des Weiteren fällt der Term eiωt in Berechnungen häufig heraus, so dass die Zeitabhängigkeit in den meisten Fällen nicht explizit betrachtet werden muss. 2.1 Die stationären Leitungsgleichungen Ein homogener Leiterabschnitt der Länge ∆x wird durch das Ersatzschaltbild aus Abbildung 2.1 beschrieben. Ein Leiterabschnitt lässt sich danach durch vier komplexe Widerstände (Impedanzen) beschreiben. Diese werden als längenbezogene Größen (Beläge) definiert. Bei verlustlosen R' x L' x C' x G' x x x+ x Abbildung 2.1: Das Ersatzschaltbild eines Leitungsabschnittes der Länge ∆x Leitungen ist dies der Induktivitätsbelag L’ (in H/m) und der Kapazitätsbelag C’ (in F/m). Bei verlustbehafteten Leitungen kommt der Widerstandsbelag R’ (in Ω /m) und der Ableitungsbelag G’ (in S/m = 1/Ωm) hinzu. Die Ersatzschaltung stellt somit ein lineares zeitinvariantes System (LTI-System) dar. Somit ist die Übertragungsfunktion eine ausreichende Beschreibung. Die Übertragungsfunktion erhält man mit Hilfe der Kirchhoffschen Regeln, wobei zu beachten ist, dass G0 ∆x das inverse eines Widerstandes ist: Maschenregel ⇒ U (x + ∆x) − U (x) = −(R0 + iωL0 ) · I(x)∆x , 0 0 Knotenregel ⇒ I(x + ∆x) − I(x) = −(G + iωC ) · U (x)∆x . (2.2a) (2.2b) 5 2.2 Wellenwiderstand Durch den Übergang zu infinitesimalen Kabelstücken (∆x → 0) folgen zwei gekoppelte Differentialgleichungen erster Ordnung, welche stationäre Leitungsgleichungen genannt werden: dU (x) dx dI(x) dx = −(R0 + iωL0 ) · I(x) , (2.3a) = −(G0 + iωC 0 ) · U (x) . (2.3b) Diese können durch den Ansatz einer hin- (Uh ) und einer rücklaufenden (Ur ) Welle gelöst werden: U (x) I(x) mit = = γ := Uh · e−γx + Ur · eγx , Ih · e q −γx (2.4a) γx − Ir · e (2.4b) (R0 + iωL0 )(G0 + iωC 0 ) = α + iβ . Der Exponent γ ist der Ausbreitungskoeffizient und beschreibt die Ausbreitung der Welle. Dabei ist α ∈ R≥0 der Dämpfungskoeffizient, welcher oft in Dezibel pro Meter (dB/m) angegeben wird: α̃ = 20 · lg(eα ) dB = α · 20 · lg(e) dB . (2.5) 2.2 Wellenwiderstand An den Leitungsgleichungen (Gleichungen 2.3) sieht man, dass Spannung und Strom voneinander abhängen. Der Zusammenhang wird deutlich, wenn man Gleichung 2.3a nach I(x) auflöst und die Ableitung der Lösung 2.4a einsetzt: I(x) = Uh e−γx Ur eγx γ −γx γx = − . U e − U e r h R0 + iωL0 ZL ZL (2.6) Vergleicht man Gleichung 2.6 mit Gleichung 2.4b sieht man, dass zwischen Strom und Spannung nur ein frequenzabhängiger Faktor liegt. Dieser ist definiert als der Wellenwiderstand der Leitung oder auch als der Leitungswellenwiderstand: U (x) ZL := = I(x) γ 0 R + iωL0 s −1 = R0 + iωL0 . G0 + iωC 0 (2.7) Somit ist der Leitungswellenwiderstand nur von den Belägen der Leitung, also der Geometrie und dem Material des Leiters abhängig. Häufig werden der Einfachheit halber verlustlose Leitungen betrachtet. Dann vereinfacht sich der Leitungswellenwiderstand mit R0 = G0 = 0 zu s ZL = iωL0 = iωC 0 s L0 . C0 (2.8) 2.3 Reflexionskoeffizient Es war bisher häufig die Rede von hin- und rücklaufenden Wellen. Die hinlaufende Welle ist dann das Signal, welches übertragen werden soll. Die rücklaufende Welle jedoch ist eine meist unerwünschte Welle, welche durch Reflexionen entsteht. Bei einer homogenen Leitung können Reflexionen nur an Leitungsenden auftreten. Um die Reflexionen genauer beschreiben zu können, definiert man den Reflexionskoeffizient r: r(x) := Ur · eγx . Uh · e−γx (2.9) 6 2.4 Stehende Wellen Nun legen wir ohne Beschränkung der Allgemeinheit das Ende des Leiters an die Stelle x = 0, da nur die Reflexionen am Leitungsende auftreten. Dann folgt aus Gleichung 2.4a und 2.6: U (0) = Uh + Ur und I(0) = Ih − Ir = Uh − Ur . ZL (2.10) Zusätzlich gilt an dem Abschlusswiderstand Za , welcher an der Stelle x = 0 liegt, nach dem komplexen Ohm’schen Gesetz U (0) = Za · I(0) . (2.11) Nun liefert Gleichung 2.11, wenn man die Gleichungen 2.10 einsetzt und entsprechend umformt, folgende Beziehung für den Reflexionskoeffizienten am Kabelende (x = 0): r= Ur Za + ZL . = Uh Za − ZL (2.12) Der Reflexionskoeffizient ist im Allgemeinen eine komplexe Größe. Ein Kabel gilt als korrekt abgeschlossen, wenn keine Reflexion entsteht. Dazu muss nach Gleichung 2.12 Za = ZL gelten. Bei einem offenen Leiterende geht Za gegen ∞ und der Reflexionsfaktor geht somit gegen 1 und bei einem kurzgeschlossenen Leiterende geht ZA gegen 0 und der Reflexionsfaktor gegen −1. 2.4 Stehende Wellen Eine stehende Welle entsteht durch die Überlagerung zweier Wellen gleicher Frequenz, welche sich in entgegengesetzter Richtung ausbreiten. Diese geschieht in einem Leiter durch Reflexion. Die Amplitude der reflektierten Welle hängt dabei von dem Reflexionskoeffizienten r ab. Bei Abbildung 2.2: Die Überlagerung der einlaufwenden Welle (blau) und der reflektierten Welle (rot) mit r = −1 = 1 · eiπ am rechten Ende, also einem Phasensprung von 180◦ , bildet eine stehende Welle (schwarz) mit festen Knotenpunkten (rot). einer idealen stehenden Welle muss vollständige Reflexion auftreten, d.h. es gilt |r| = 1. Ist die Reflexion nicht vollständig, ergeben sich Wanderwellen und keine stehenden Wellen. Eine stehende Welle ist in Abbildung 2.2 dargestellt. Dies ist eine stehende Welle, da die rot eingezeichneten Knotenpunkte sich mit der Zeit nicht von der Stelle bewegen. Da der Reflexionsfaktor 7 2.5 Mehrfachreflexion im Allgemeinen komplex ist, sorgt er für unterschiedliche Phasensprünge an der Reflexionsstelle. In Abbildung 2.2 liegt ein Phasensprung von 180◦ (bzw. π) vor, was dazu führt, dass ein Knoten der stehenden Welle direkt am Reflexionspunkt liegt. Andere Phasensprünge sorgen für eine Verschiebung der Knotenpunkt in x-Richtung. Ist die Reflexion nicht vollständig (d.h. |r| < 1) bleiben die Knoten nicht auf einer Stelle, sie wandern genau wie Minimum und Maximum. Es handelt sich dann um die bereits kurz angesprochenen Wanderwellen, welche fälschlicherweise oft zu den stehenden Wellen gezählt werden. [Veranschaulicht wird dies gut durch folgendes Applet: www.pk-applets.de/phy/interferenz/ interferenz.html] 2.5 Mehrfachreflexion Wenn Mehrfachreflexionen auftreten, kommt es zu Interferenzerscheinungen mehrerer Wellen derselben Frequenz. Interferieren diese Wellen phasenrichtig, kommt es zur Resonanz. Mehrfachreflexion kann durch fehlerhaft angepasste Leitungen an zwei Stellen (z. B. eine Leitung mit falschen Leitungswellenwiderstand zwischen zwei Geräten) oder aber auch durch Defekte an der Leitung selbst entstehen. In Abbildung 2.3 ist eine Leitung mit zwei Störstellen (bei x = 0 Uh Z1 Z2 0 l Za x Abbildung 2.3: Die Darstellung einer Situation mit Mehrfachreflexion und x = l) dargestellt. Nun wird ein Teil der einlaufenden Welle an der Stelle x = 0 transmittiert. Dieser Teil wird an der Stelle x = l zu einem gewissen Teil reflektiert und so weiter. Dies sieht mathematisch wie folgt aus, wenn r bzw. t die entsprechenden komplexen Reflexions- bzw. Transmissionskoeffizienten an der 1. (x = 0) und 2. Reflexionsstelle (x = l) in der Abbildung 2.3) ist: Uh (0) = t1 · Uh Uh (l) = t1 · Uh · e−γl Ur (l) = r2 t1 · Uh · e−γl Ur (0) = r2 t1 · Uh · e−2γl Uh2 (l) = r1 r2 t1 · Uh · e−2γl .. . Dieser Vorgang wiederholt sich immer wieder und die Gesamtamplitude ist dann die Addition aller dieser Umläufe: Uges (x) = t1 Uh · 1 + r1 r2 e−2γl + · · · · e−γx . Auf diese unendliche Folge lässt sich die Geometrische Reihe x = r1 r2 e−2γl anwenden: Uges (x) = t1 Uh · e−γx . 1 − r1 r2 e−2γl P∞ n=0 x n = 1 1−x für |x| < 1 mit (2.13) 8 2.5 Mehrfachreflexion Für die Transmission an der Stelle x = l bedeutet dies: Utrans (l) = t2 · Uges (l) = t2 t1 Uh · e−γl . 1 − r1 r2 e−2γl (2.14) 2 (l)| Um der transmittierten Leistung (Pt = |Utrans (l)| · |Itrans (l)| = |Utrans ) nun sinnvolle InforZL mationen zu entnehmen, werden folgende Definitionen eingeführt: rj = |ri |eiφj für j = 1,2 , R = |r1 ||r2 | , T = |t1 ||t2 |: Pt = T 2 |e−γl |2 |Uh |2 · . ZL 1 − R ei(ϕ1 +ϕ2 ) e−2γl 2 Betrachtet man γ = α + iβ und berücksichtigt, dass |eix | = 1 ∀x ∈ R gilt, kann man den Verlustfaktor V = e−2αl einführen. β lässt sich auch als die Wellenzahl k interpretieren: Pt = |Uh |2 T2 V · . ZL 1 − RV ei(ϕ1 +ϕ2 −2kl) 2 Mit φ = ϕ1 + ϕ2 − 2kl, der eulerschen Formel und dem Additionstheorem cos(2x) = 1 − 2 sin2 (x) lässt sich diese Gleichung vereinfachen: Pt = |Uh |2 T2 V · . ZL (1 − RV )2 + 4RV sin2 ( φ2 ) (2.15) Betrachten wir nun wieder die verlustlose Leitung für die α = 0 und somit V = 1 gilt, folgt Pt = = T2 |Uh |2 · ZL (1 − R)2 + 4R sin2 φ 2 |Uh |2 · ZL T 1−R 2 · 1 1 + F sin2 (2.16) φ 2 mit dem Finesse-Faktor: F = 4R . (1 − R)2 Die Gleichung 2.16 bezeichnet man auch als Airy-Funktion. Sie beschreibt z. B. auch das Transmissionsverhalten eines optischen Resonators wie er in Lasern oder in einem Fabry-PerotInterferometer Verwendung findet (siehe auch Versuch "Optische Resonatoren"). Nun ist zu erkennen, dass bei festem Reflexions- und Transmissionskoeffizienten die maximale Leistung übertragen wird, wenn der Sinus in Gleichung 2.16 verschwindet: φ 2 sin =0 ⇔ φ = πn ⇔ φ = 2πn mit n ∈ Z . 2 (2.17) Demnach wird die meiste Leistung transmittiert, wenn die Resonanzbedingung 2kn l − ϕ1 − ϕ2 = 2πn (2.18) erfüllt ist. Hier sind ϕj mit j = 1,2 die Phasen der Reflektionskoeffizienten, d.h. die Phasensprünge, welche die Welle bei der Reflexion an der jeweiligen Stelle erfährt. Die Bedingung 2.18 ist also erfüllt, wenn ein Umlauf im Resonator genau den Phasendurchgang von 2πn herbeiführt. Dies hat zur Folge das am wenigsten Leistung reflektiert wird. 9 2.6 Bauteile der Hochfrequenztechnik 2.6 Bauteile der Hochfrequenztechnik 2.6.1 Verschiedene homogene Doppelleitungen Lecherleitung Der erste Gedanke einen Leiter annähernd homogen zu bekommen ist die symmetrische Doppelleitung (Lecherleitung), welche nach ihrem Erfinder Ernst Lecher (1856 - 1926 ) benannt ist. Sie besteht einfach aus zwei identischen parallelen Drähten. Meistens sind die Drähte in einem Kunststoffmantel eingeschmolzen, um einen konstanten Abstand zu garantieren. Wie in Abbildung 2.4: Das elektromagnetische Feld einer Lecherleitung (Quelle: [2], S.41) Abbildung 2.4 zu sehen ist, reicht das elektromagnetische Feld weit in den Raum außerhalb des Leiters. Dadurch muss sich das Feld zwangsläufig in unterschiedlichen Materialien ausbreiten und dies führt mitunter zu starken Abweichungen in der Ausbreitung der Leitungswelle, also auch dem Leitungswellenwiderstand. Zudem können andere äußere elektromagnetische Felder in das Kabel einkoppeln. Somit ist der Einsatzbereich typischerweise auf Frequenzen bis höchstens 100 MHz begrenzt. Die einzigen Vorteil sind die einfache Herstellung und die Möglichkeit relativ hohe Leistungen übertragen zu können. Koaxialleitung Die Koaxialleitung (oder auch das Koaxialkabel) ist wohl der am häufigsten verwendete TEMLeiter. Eine Koaxialleitung besteht aus einem Innenleiter und einem Außenleiter, welcher den H E di da Abbildung 2.5: Der Aufbau und das Feld einer Koaxialkabels (Querschnitt) Innenleiter umschließt. So schirmt der Außenleiter den Innenleiter nach außen hin ab. Zwischen diesen beiden befindet sich ein Dielektrikum. Aus diesem Aufbau folgt, dass sich das elektromagnetische Feld nur innerhalb des Leiters befindet (siehe Abbildung 2.5). Dies macht ihn sehr viel unempfindlicher gegen äußere Einflüsse und stellt eine viel größere Homogenität der Leitung 10 2.6 Bauteile der Hochfrequenztechnik sicher. Wenn neben der relativen Permittivität r des Dielektrikums die Maße di (Außenradius des Innenleiters) und da (Innenradius des Außenleiters) eines Koaxialkabels bekannt sind, lassen sich der Kapazitäts- und der Induktivitätsbelag berechnen. Die Kapazität ist definiert als C = Q/U . Die Spannung zwischen Innen- und Außenleiter eines Koaxialkabels ist über das E-Feld definiert. Beim Koaxialkabel nimmt man der Einfachheit halben den direkten Weg vom Innen- zum Außenleiter, also den Weg genau entlang der Feldlinien: Z da /2 Z da /2 Z U= E ds = E(r) dr = di /2 di /2 Q da Q · ln dr = 2π∆x0 r r 2π∆x0 r di . Daraus folgt dann für C 0 = C/∆x: C 0 = 2π0 r 1 ln . da di (2.19) Um den Induktivitätsbelag zu berechnen, nimmt man an, dass bei den zu betrachtenden Frequenzen aufgrund des Skin-Effektes die magnetischen Energien innerhalb der beiden Leiter zu vernachlässigen sind. Die Induktion ist definiert durch L = dΦ/dI : Z Φ= B dA = µ0 µr · Z H dA = µ0 µr · Z da /2 I di /2 2πr µ0 µ r da I ∆x · ln 2π di ∆x dr = . Für den Induktivitätsbelag (L0 = L/∆x) gilt demnach: µ0 µ r da L = · ln 2π di 0 . (2.20) Für eine verlustlose Leitung lässt sich nun der Leitungswellenwiderstand an Hand der Abmessungen des Leiters und des Materials vom Dielektrikum (r , µr ) berechnen. In einem Dielektrikum ist µr meist sehr nah an 1 und somit zu vernachlässigen: s ZL = L0 1 = C0 2π r µ0 µr da · ln 0 r di . (2.21) Mikrostreifenleitung Um Mikrowellenleiter auch auf Platinen verbauen zu können, sind Koaxialleiter nicht geeignet. Dazu benutzt man meistens den Mikrostreifenleiter (Abbildung 2.6). Ein Mikrostreifenleiter besteht aus einem schmalen metallischem Streifen, welcher durch ein Dielektrikum von einer metallischen Fläche getrennt wird. Durch diesen Aufbau lässt er sich sehr einfach auf eine Platine ätzen. Doch auch hier befindet sich das elektromagnetische Feld, wie in Abbildung 2.6 zu sehen H Leiter Dielektrikum E Abbildung 2.6: Der Aufbau eines Mikrostreifenleiters (Querschnitt) ist, zum Teil wieder im Raum außerhalb des Dielektrikums (r ), allerdings sehr viel weniger als bei der Lecherleitung. Ein weiterer Nachteil der Mikrostreifenleiter ist der höhere Verlust gegenüber der Koaxialleitung. 11 2.6 Bauteile der Hochfrequenztechnik 2.6.2 Richtkoppler Ein Richtkopplers ermöglicht es, Wellen mit verschiedenen Ausbreitungsrichtung voneinander zu trennen, um diese z. B. einzeln messen zu können. Weitere Anwendungsbereiche sind der Einsatz als Leistungsteiler, Frequenzweiche und Mischer. Ein Richtkoppler ist ein sogenanntes Viertor (bzw. Achtpol), d.h. er hat vier Ein- bzw. Ausgänge. Diese teilen sich in die Hauptund in die Nebenleitung auf (siehe Abbildung 2.7). Bei einem Richtkoppler sind die beiden Leitungen so miteinander gekoppelt, dass die Leistungen auf den Ausgängen 3 und 4 von der Ausbreitungsrichtung der Welle in der Hauptleitung (Tor 1 und 2) abhängen. Auf den Ausgang Kopplung 2 3 Hauptleitung Kopplung 1 1 /4 Nebenleitung 2 4 Abbildung 2.7: Schematische Darstellung des Grundprinzips eines Richtkopplers 3 koppelt ein Teil der Leistung der Welle, welche von Tor 2 nach Tor 1 läuft. Die Welle, welche von Tor 1 zu Tor 2 läuft, wird zum Teil auf Tor 4 gekoppelt. Ist dieses mit einem angepasstem Abschlusswiderstand versehen, wird Leistung im Abschlusswiderstand in Wärme umgewandelt. Wie viel Leistung der Hauptleitung auf die Nebenleitung übertragen wird, hängt von der Stärke der Kopplung ab und wird durch die Koppeldämpfung (oder auch Direktivität) beschrieben: P1 dB . (2.22) Koppeldämpfung = 10 · lg P4 Eine weitere Kenngröße, welche bei Richtkopplern von Bedeutung ist, ist die Isolation. Sie gibt an wie viel Leistung der Welle von Tor 1 ungewollt an Tor 3 ausgegeben wird: P2 Isolation = 10 · lg dB . (2.23) P4 Außerdem ist die Einfügedämpfung bei Richtkopplern eine weitere Kenngröße. Sie gibt die Dämpfung auf der Hauptleitung an: P1 Einfügedämpfung = 10 · lg dB . (2.24) P2 Das Grundprinzip eines Richtkopplers beruht auf destruktiver und konstruktiver Interferenz. Dazu werden Haupt- und Nebenleitung an zwei Stellen im Abstand von λ/4 gekoppelt. Nun läuft eine Welle an Tor 1 ein und wird am ersten Kopplungspunkt auf die Nebenleitung übertragen, wo sie sich in beide Richtungen hin ausbreitet. Selbiges geschieht nach einer Strecke von λ/4 auf der Hauptleitung am zweiten Kopplungspunkt. Da sich die Wellen in der Nebenleitung jeweils in beide Richtungen ausbreiten, überlagern sie sich dort. Die Welle, welche von Tor 1 nach Tor 4 fließt legt über beide Wege dieselbe Strecke zurück. Diese haben also dieselbe Phase und interferieren konstruktiv, d.h. eine Leistung wird übertragen. Die Welle, welche sich von Tor 1 nach Tor 3 ausbreitet, legt jedoch zwei unterschiedliche Wege zurück, nämlich einmal den direkten Weg über den ersten Kopplungspunkt und zum anderen den Umweg über den zweiten Kopplungspunkt. Dies ergibt eine zusätzliche Strecke von λ/2. Somit interferieren diese destruktiv und es wird keine Leistung übertragen. Für eine Welle, die in Tor 2 einläuft, gelten analoge Überlegungen. So funktioniert ein Richtkoppler allerdings streng genommen nur für ein sehr schmales Frequenzband bzw. nur für eine Frequenz. Nun werden noch diverse Tricks verwendet, um die Bandbreite zu erhöhen. So kommt es bauartbedingt dazu, dass bei Richtkopplern für Koaxialleitungen Tor 3 und Tor 4 meist vertauscht sind. 12 2.6 Bauteile der Hochfrequenztechnik 2.6.3 Zirkulator Ein Zirkulator ist meist ein Dreitor, welches einlaufende Wellen nach dem Prinzip aus Abbildung 2.8 weiterleitet. Sind alle Tore ideal angepasst, tritt die gesamte Energie der in Tor 1 einlaufenden 2 1 3 Abbildung 2.8: Das Prinzip eines Zirkulators mit 3 Toren Welle durch Tor 2 aus. Die gesamte Energie, welche in Tor zwei einläuft, tritt durch Tor 3 aus und die gesamte Energie, welche in Tor 3 einläuft, tritt durch Tor 1 aus. Wichtige Kenngrößen eines Zirkulators sind zum einen die Bandbreite und zum anderen die Durchlassdämpfung: P1 Durchlassdämpfung = 10 · lg P2 dB (2.25) sowie die Sperrdämpfung P1 dB . (2.26) Sperrdämpfung = 10 · lg P3 Diese Dämpfungen werden für alle der drei Eingänge angegeben. Ein Zirkulator funktioniert aufgrund des Faraday-Effektes. Er beschreibt die Drehung der Polarisationsrichtung einer elektromagnetischen Welle beim Durchgang durch ein dielektrisches Medium unter Einfluss eines Magnetfeldes in Ausbreitungsrichtung. Dieser Effekt lässt sich erklären, da die Elektronenspins in dielektrische Materialien unter dem Einfluss eines Magnetfeldes mit der Lamorfrequenz um die Richtung des Magnetfeldes präzidieren. Wodurch das dielektrische Material zirkular doppelbrechend wird, d.h. es liegen verschiedene Ausbreitungsgeschwindigkeiten für links- und rechtszirkular polarisierte Wellen vor. Da sich linear polarisierte Wellen in eine links- und eine rechts Abbildung 2.9: Der Aufbau eines Y-Zirkulators aus Mikrostreifenleitern (Quelle: [6], S.89) zirkular polarisierte Welle zerlegen lassen und der Faraday-Effekt nicht reziprok ist, gelingt der Bau eines Zirkulators. Sie sind nun so konstruiert, dass an den Ausgängen die beiden zirkular polarisierten Teilwellen konstruktiv bzw. destruktiv interferieren. Der am meisten verwendete Zirkulator ist der sogenannte Y-Zirkulator, welcher auf Basis von Mikrostreifenleitern nach Abbildung 2.9 aufgebaut ist. Bei ihm sind die drei Tore als Mikrostreifenleiter ausgeführt und laufen in einer kleinen Scheibe (meist aus demselben Material wie die Leiter) unter einem Winkel von 120◦ zusammen. Unter bzw. über dieser Scheibe befindet sich nun eine Scheibe aus einem Ferrit (dielektrisch), welche für den angesprochenen Faraday-Effekt sorgt, da sich dort durch Permanentmagneten verursacht ein stationäres Magnetfeld senkrecht zur Leiterebene befindet. 13 2.6 Bauteile der Hochfrequenztechnik 2.6.4 Isolator (Richtleitung) Versieht man einen Zirkulator an Tor 3 mit einem angepassten Abschlusswiderstand, so erhält man eine Richtleitung (meist nur Isolator genannt). Er lässt die Welle in einer Richtung (von Tor 1 zu Tor 2) nahezu ungehindert passieren während sie in der anderen Richtung fast vollständig absorbiert wird. Isolatoren werden benötigt, um zum Beispiel Mikrowellengeneratoren vor Reflexionen zu schützen. Ein Isolator wird durch das frequenzabhängige Dämpfungsmaß in beiden Richtungen beschrieben. Zur Steigerung der Rückflussdämpfung werden auch 4-Tor-Zirkulatoren benutzt an denen zwei hintereinanderliegende Tore mit einem angepassten Abschlusswiderstand versehen sind. 2.6.5 Diode bzw. Detektor Für die meisten Messgeräte ist es notwendig Mikrowellen vor dem messen gleichzurichten. Dies geschieht mit gleichrichtenden Detektoren, im deutschen meist nur Dioden (eigentliche Bedeutung: "Zweipol") genannt. Dioden sind nichtlineare elektrische Bauelemente, deren elektrische Leitfähigkeit zum großen Teil von der Stromrichtung abhängt. Durchlassrichtung Abbildung 2.10: Das Schaltsymbol einer Diode Halbleiter-Halbleiter-Diode (p-n-Diode): Am bekanntesten sind die Halbleiter-Halbleiter Dioden, welche mit einem p-n-Übergang arbeiten. In einem Halbleiter sind alle Elektronen gebunden, somit kostet es viel Energie ein Elektron vom Valenzband ins Leitungsband anzuheben. Um dies zu vereinfachen, werden die Halbleiter dotiert. Man unterscheidet zwischen p- und nDotierung. Um eine p-Dotierung zu erhalten, versetzt man den Halbleiter mit einem Akzeptor, p n Elektron p Elektronen-Loch n Veramungszone (durch Rekombination) Abbildung 2.11: Der p-n-Übergang einer Diode welcher einen freien Elektronenplatz (Loch) mit nur geringfügig mehr Energie wie die Elektronen des Halbleiters mitbringt. Um dagegen eine n-Dotierung zu erhalten, versetzt man den Halbleiter mit einem Donator, welcher ein fast freies Elektron mitbringt. Genutzt wird nun ein p-n-Übergang, welcher eine Verarmungszone (Sperrschicht) erzeugt, indem die fast freien Elektronen mit den Löchern rekombinieren (siehe Abbildung 2.11). Wenn man nun eine äußere Spannung in Durchlassrichtung, d.h. den Pluspol am p-dotierten Halbleiter anlegt, kann ein Strom fließen. Liegt jedoch eine äußere Spannung in Sperrrichtung, d.h. der Pluspol am n-dotierten Halbleiter an, vergrößert dies die Verarmungszone und es kann kein Strom fließen. Schottky-Diode: In der Hochfrequenztechnik reagieren solche p-n-Dioden häufig zu langsam, deshalb benutzt man meist Metall-Halbleiter-Dioden. Diese reagieren wesentlich schneller, vertragen aber im Allgemeinen weniger Leistung. Der bekannteste Vertreter unter diesen ist die Schottky-Diode. Vom Grundprinzip funktioniert diese ähnlich wie die p-n-Diode, nur tritt anstelle des p-dotierten Halbleiters eine Metallelektrode. Es existieren also nur fast freie Elektronen und keine Elektronenlöcher. Diese bilden nun alleine die Sperrschicht. 14 3.1 Equipment 3 Das Experiment In diesem Experiment wird die Ausbreitung von elektromagnetischen Wellen mit MikrowellenFrequenzen in Koaxialkabeln untersucht. Koaxialkabel werden bei den meisten Experimenten zum Übertragen der Daten vom Messobjekt zum Messgerät bzw. zur Messauswertung benutzt. Somit ist es für jedes Experiment von Vorteil, grundlegende Kenntnisse von der Datenübertagung zu haben, da diese unter Umständen auch die Messergebnisse verfälschen kann. Zuerst wird das Messequipment, also das Verhalten der Diode (bzw. in engl. Detector), analysiert. Mit Hilfe der Eigenschaften der Diode lassen sich dann verschieden Bauteile der Hochfrequenztechnik, welche zur Datenübertragung benutzt werden, untersuchen. Durch alle diese Erkenntnisse ist es nun möglich, das Phänomen der stehenden Wellen in Koaxialkabeln messtechnisch zu ergründen und mit Hilfe dieser die Ausbreitungsgeschwindigkeit der Mikrowellen in Koaxialkabeln zu bestimmen. 3.1 Equipment • Mikrowellengenerator: Wiltron 6759B • Digitalmultimeter: TTi 1906 • 2 x GPIB Kabel • Windows Computer mit GPIB-Karte und LabVIEW • Detector Diode: Agilent Technologies / HP - 33330B negativ • Adapter BNC-Stecker auf 2x Bananenstecker • Adapter SMC-Stecker auf BNC-Stecker • Koaxialkabel mit BNC-Buchsen • Isolator: narda 60583 • Richtkoppler: narda 4226-10 (mit zweiter Gruppe teilen) • Zirkulator: AEROTEK F61-1FFF • Zirkulator: AEROTEK H60-1FFF • Kopplungsstück (Selbstanfertigung) • diverse Koaxialkabel mit SMC-Steckern • 2 x Adapter SMA-Buchse auf SMA-Buchse • 2 x 50 Ohm Abschlusswiderstand SMA-Stecker • Kalibriertes offenes und geschlossenes Kabelende mit SMA-Stecker 15 3.2 Vorausgesetzte Kenntnisse 3.2 Vorausgesetzte Kenntnisse Für dieses Experiment sind Kenntnisse der Leitungstheorie, wie sie unter Grundlagen beschrieben werden, vorausgesetzt. Dies beinhaltet neben der grundlegenden Idee zur Ausbreitung elektromagnetischer Wellen also im wesentlichen folgende Punkte: stationäre Telegraphengleichung, Wellenwiderstand, Reflexionskoeffizient, Stehende Wellen, Mehrfachreflexion, Koaxialleiter, Streifenleiter, Richtkoppler, Zirkulator, Isolator (Richtleitung), Diode bzw. Detektor. 3.3 Aufgaben Für sämtliche Messungen benutzen Sie den Mikrowellengenerator Wiltron 6759B und das Digitalmultimeter TTi 1906. Beide sind per GPIB-Schnittstelle mit dem Computer zu verbinden. So Abbildung 3.1: Das hier benutzte Digitalmultimeter TTi 1906 und der hier benutzte Mikrowellengenerator Wiltron 6759B sind im Versuchseinsatz zu sehen. können sie komplett über den Computer bedient und ausgelesen werden. Auf dem Computer sind dazu die LabVIEW-Programme "Messungen Frequenz" und "Messungen Leistung" vorhanden. Diese geben die Spannung am Multimeter in Abhängigkeit von der Frequenz der Mikrowellen bzw. von der Leistung der Mikrowellen des Mikrowellengenarators aus. 3.3.1 Das Messequipment (Diode / Detektor) Nehmen Sie die Kennlinie (Ausgangsspannung in Abhängigkeit der Eingangsleistung) ihrer Messdiode auf. Verbinden Sie dazu den "RF OUTPUT" des Mikrowellengenerators direkt per Koaxialkabel (SMA-Stecker) mit der Messdiode. Von der Messdiode gehen Sie über geeignete Adapter GPIB Mikrowellengenerator Multimeter RF-OUT Koaxialkabel GPIB-Kabel GPIB GPIB IN Computer Messdiode Abbildung 3.2: Messaufbau zur Messung der Diodenkennlinie 16 3.3 Aufgaben und einem Koaxialkabel mit BNC-Steckern direkt in den Spannungseingang des Digitalmultimeters. Der Messaufbau ist in Abbildung 3.2 dargestellt. Achten Sie darauf, dass das Eingangssignal am Digitalmultimeter positiv ist. Ist dies nicht der Fall, müssen sie die beiden Pole am Eingang Abbildung 3.3: Die hier benutzte Messdiode (evtl. mit anderem Aufkleber). des Digitalmultimeters vertauschen. Die korrekte Anschlussweise ist in Abbildung 3.1 gezeigt. Der Ausgang der Diode ist der SMC Stecker (der kleinere der beiden). Das LabVIEW Programm "Messungen Leistung" zeichnet dann die Ausgangsspannung der Messdiode bei variabler Ausgangsleistung des Mikrowellengenerators auf. Überlegen Sie sich bei der Messauswertung, welchen Einfluss die gemessene Kennlinie auf die folgenden Messungen hat. Beachten Sie dabei, dass nicht der gesamte Energiebereich bei den folgenden Messungen benötigt wird. Abbildung 3.4: Die zu verwendende Software mit einer gemessenen Diodenkennlinie 3.3.2 Bauteile der Hochfrequenztechnik Die hier behandelten Bauteile der Hochfrequenztechnik werden durch Dämpfungsfaktoren beschrieben. Dämpfungen werden aus dem Verhältnis zweier Leistungen errechnet. Um nun bei 3 GPIB Mikrowellengenerator Multimeter RF-OUT Koaxialkabel GPIB-Kabel GPIB GPIB IN IN Computer OUT Messobjekt Abbildung 3.5: Messaufbau zur Messung einer Dämpfung (ACHTUNG: Alle nicht verwendeten Anschlüsse mit angepasstem Abschlusswiderstand (50 Ω) versehen!) oder mehr Toren keine zusätzlichen Reflexionen zu messen, ist es nötig, alle nicht zur Messung 17 3.3 Aufgaben verwendeten Tore mit einem angepassten Abschlusswiderstand (50 Ω) zu versehen. Dämpfungen sind im Allgemeinen frequenzabhängig und somit können sie nicht Allgemein sondern nur in Abhängigkeit der Frequenz angegeben werden. Aus dieser Frequenzabhängigkeit lässt sich eine sinnvolle Bandbreite des Bauteils ermitteln. Die Eingangsleistung der Messung ist die Ausgangsleistung des Mikrowellensenders, welche in dem zur Messung zu verwendenden LabVIEW Programm "Messungen Frequenz" eingestellt werden kann. Zur Bestimmung der Dämpfung, ist die Ausgangsleistung im Verhältnis zur Eingangsleistung zu messen. Die Eingangsleistung ist mit Abbildung 3.6: Das Messprogramm inkl. einer Beispielleistungsmessung dem Messaufbau aus Kapitel 3.3.1 zu bestimmen. Die Ausgangsleistung des Tors OUT des Messobjekts von der am Tor IN anliegende Leistung ist mit dem Messaufbau aus Abbildung 3.5 zu messen. Mehr zu den einzelnen Dämpfungen steht im Kapitel "Grundlagen der Leitungstheorie" unter "Bauteile der Hochfrequenztechnik" (Kapitel 2.6). Isolator (Richtleitung) Bestimmen sie das frequenzabhängige Dämpfungsmaß des Isolator (Richtleitung) in beiden Richtungen und überlegen sie sich daraus eine sinnvolle Bandbreitenangabe. Abbildung 3.7: Der zu vermessende Isolator (Richtleitung) Der Richtkoppler Bestimmen sie folgende frequenzabhängigen Größen des Richtkopplers: • Koppeldämpfung • Einfügedämpfung • Richtdämpfung (wenn möglich) 18 3.3 Aufgaben Abbildung 3.8: Der zu vermessende Richtkoppler Zirkulator Bestimmen sie folgende frequenzabhängigen Größen der beiden Zirkulatoren und überlegen Sie sich damit jeweils eine sinnvolle Bandbreitenangabe: • Durchlassdämpfung • Sperrdämpfung Diese beiden Dämpfungen sind für jedes der drei Tore pro Zirkulator zu messen. Abbildung 3.9: Die beiden zu vermessenden Zirkulatoren 3.3.3 Messen der stehenden Wellen / Resonanzen Nach dem Kennenlernen der zur Messung der Resonanzfrequenzen benötigten Bauteile, sollen diese bei verschiedenen Kabeln mit unterschiedlichen Abschlusswiderständen bestimmt werden. Dazu muss auf beiden Seiten des Koaxialkabels ein genügend großer Anteil der Welle reflek- Abbildung 3.10: Das kapazitive Koppelstück für die Resonanzmessungen tiert werden. Somit kann das Kabel nicht direkt mit dem Zirkulator verbunden werden. Um eine genügend hohen Reflexionskoeffizienten an beiden Kabelenden zu erreichen, ist ein Mikrostreifenleiter entsprechend präpariert und mit Steckern versehen worden. Die beiden Anschlüsse 19 3.3 Aufgaben des angefertigten Bauteils (Abbildung 3.10) sind kapazitiv (über einen Kondensator) gekoppelt. Zum Messen der Resonanzen ist der Aufbau aus Abbildung 3.11 zu verwenden. GPIB Mikrowellengenerator GPIB GPIB Multimeter RF-OUT IN Computer Abschlusswiderstand Messleitung Koppler Koaxialkabel GPIB-Kabel Abbildung 3.11: Messaufbau zu den Messungen in Kapitel 3.3.3 Unterschiedliche Abschlusswiderstände Bestimmen sie Frequenzen der Resonanzen mit unterschiedlichen Abschlusswiderständen und vergleichen sie diese Resonanzfrequenzen miteinander. Dazu stehen ein kalibriertes offenes Ka- Abbildung 3.12: Der kalibrierte Kabelabschlusswiderstand (offen und kurzgeschlossen) belende und ein kalibriertes kurzgeschlossenes Kabelende zur Verfügung. Diese beiden befinden sich in einem Bauteil mit 2 SMA-Steckern (Abbildung 3.12). Natürlich bleibt auch die Möglichkeit das Kabel ohne Abschlusswiderstand (also ein unkalibriertes offenes Kabelende) zu nehmen. Achten Sie bei den Messungen darauf, genügend Messpunkte aufzunehmen, damit Ihnen keine Peaks entgehen. Achten Sie außerdem darauf, dass nur innerhalb der Bandbreite des verwen- Abbildung 3.13: Messprogramm inkl. einer Resonanzmessung als Beispiel deten Zirkulators eine vernünftige Messung durchgeführt werden kann. Bestimmen Sie zum 20 3.3 Aufgaben einen jeweils ∆f = fn+1 − fn , also den Frequenzabstand zweier Resonanzen bei gleichem Abschlusswiderstand und zum anderen den Frequenzabstand der benachbarten Resonanzen bei unterschiedlichen Abschlusswiderständen. Um diese Frequenzabstände hinreichend genau zu bestimmen, bilden Sie den Mittelwert aus 5-10 verschiedenen Frequenzabständen. Wie verändern sich die Resonanzfrequenzen, wenn die beiden kalibrierten Abschlusswiderstände (offenes und kurzgeschlossenes Kabelende) verwendet wird? Die Ausbreitungsgeschwindigkeit Ermitteln Sie aus zwei Resonanzfrequenzen die Ausbreitungsgeschwindigkeit der Wellen in einem der vorliegenden Koaxialkabeln. Die Länge l des Koaxialkabels ist dabei mit einem normalen Maßband (Zollstock, Lineal,...) möglichst genau zu vermessen. Um die Ausbreitungsgeschwindigkeit zu ermitteln, folgt aus Gleichung 2.18 für zwei benachbarte Resonanzen: [2kn+1 l − ϕ1 − ϕ2 ] − [2kn l − ϕ1 − ϕ2 ] = [2π(n + 1)] − [2πn] 2kn+1 l − 2kn l = 2π(n + 1) − 2πn 2(kn+1 − kn )l = 2π mit kn = 2π (fn+1 − fn )l = π c c = 2l(fn+1 − fn ) (3.1) (3.2) 2π 2πfn = λn c (3.3) (3.4) (3.5) Eine elektromagnetische Welle breitet sich mit Lichtgeschwindigkeit aus. Doch ist hier nicht die Lichtgeschwindigkeit des Vakuums entscheidend sondern die des Dielektrikums des Koaxialkabels in der die Welle sich ausbreitet. Da dies ein nicht ferromagnetisches Material ist, gilt näherungsweise für die Permeabilitätszahl µr = 1. Demnach lässt sich aus der Ausbreitungsgeschwindigkeit der EM-Welle im Koaxialkabel die Permittivitätszahl (r ) bestimmen: c = √ r = c0 c0 =√ µr r r c0 c (3.6) 2 . (3.7) Bestimmen Sie auch die Permittivitätszahl des Dielektrikums. Sollte noch genügend Zeit sein, bestimmen Sie zusätzlich die Ausbreitungsgeschwindigkeit und die Permittivitätszahl eines zweiten Koaxialkabels und vergleichen sie diese Ergebnisse mit denen des ersten Koaxialkabels. 21 3.3 Aufgaben 4 Quellenverzeichnis [1] Bächtold, Werner: "Lineare Elemente der Höchstfrequenztechnik", 2. überarb. Auflage, 1994, vdf Hochschulverlag AG, Zürich [2] Detlefsen, Prof. Dr.-Ing. Jürgen; Siart, Dr.-Ing. Uwe: "Grundlagen der Hochfrequenztechnik", 3. akt. und erw. Auflage, 2009, Oldenbourg Verlag, München [3] Kniestedt, Dipl.Ing. Joachim: "Heinrich Hertz: Entdecker der elektromagnetischen Wellen", www.seefunknetz.de/hhertz1.htm (15.02.2010) [4] Lange, Wulfhard: "Angewandte Physik I" Vorlesungsskript WS 2005/06, WWU Münster [5] Nibler, Ferdinand; u.a.: "Hochfrequenzschaltungstechnik. Funktionen und Anwendung von Halbleitern und Leitungen in Hochfrequenzschaltungen", 2. verb. und erw. Auflage, 1990, Expert Verlag, Ehningen bei Böblingen [6] Nimtz, Günter: "Mikrowellen. Einführung in Theorie und Anwendung", 2.Auflage, 1999, BI-Wissenschaftsverlag, Mannheim [7] Nolting, Wolfgang: "Grundkurs Theoretische Physik 3: Elektrodynamik", 8. Auflage, 2007, Springer-Verlag, Berlin [8] Petermann, Prof. Dr.-Ing. Klaus: "Hochfrequenztechnik I: Vorlesungsskript", überarb. unter Hilfe von Bunge, Dr.-Ing. Christian-Alexander, 2009, Technische Universität Berlin, http://www.hft.tu-berlin.de/menue/lehre/hochfrequenztechnik_i (19.02.2010) [9] Raith, Wilhelm: "Bergmann/Schäfer - Lehrbuch der Experimentalphysik Band 2. Elektromagnetismus", 9.überarb. Auflage, 2006, Walter de Gruyter, Berlin 22