5. Vorlesung - Ruhr-Universität Bochum
Werbung

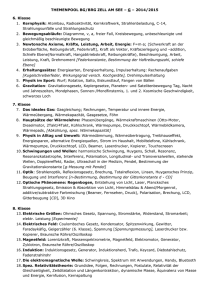
Physik für Ingenieure (Maschinenbau) Pendel, starre Körper und Drehmoment Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 1 / 27 Physik für Ingenieure (Maschinenbau) Lernziele – Ein rotierendes System ist immer auch ein beschleunigtes System – Die Schwingungsdauer eines Federpendels ist unabhängig von der Erdbeschleunigung – Die Masse eines Fadenpendels hat keinen Einfluss auf die Schwingungsdauer – Das Drehmoment ist Kraft mal effektiver Hebelarm – Ein drehender Körper ist im Gleichgewicht wenn gilt P~ Mi = 0 i – Geht die Drehachse durch den Schwerpunkt, so das effektive Drehmoment gleich Null. Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 2 / 27 Physik für Ingenieure (Maschinenbau) Wiederholung I y Beschreibung der Kreisbewegungen mit Winkelfunktionen r · cos(ϕ) x(ϕ) ~r(ϕ) = = r · sin(ϕ) y(ϕ) Bahngeschwindigkeit: v = ds dt = r dϕ =r·ω dt ω ~ ist die Winkelgeschwindigkeit in [ω] = und ein Vektor r j x(j) x Auslenkung Bogenlänge: s = r · ϕ y(j) 2p p rad/ s Allgemein gilt j w ~v = ω ~ × ~r Das Vorzeichen von ω gibt die Drehrichtung an (Drei-Finger-Regel, rechte-Hand Regel) Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) r v 20. November 2013 3 / 27 Physik für Ingenieure (Maschinenbau) Wiederholung II 2p Umlaufzeit: T = 2π ω Ds s(t1) [T] = s 51° Umlauffrequenz: f = Kreisfrequenz: ω = s(t2) 1 T 2π T = ω 2π = 2πf Dj r j0 [f] = 1/ s = Hz Dt = t2 - t1 [ω] = 1/ s Kreisbewegung jetzt zeitabhängig formulieren, für eine konstante Winkelgeschwindigkeit (Kreisfrequenz) gilt dann mit x(ϕ) → x(t) x(ϕ) = r · cos ϕ −→ Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) ϕ(t) = ω t + ϕ0 x(t) = r · cos(ωt + ϕ0 ) 20. November 2013 4 / 27 Physik für Ingenieure (Maschinenbau) Wiederholung III x(t) T x(t) = r · cos(ωt + ϕ0 ) dx(t) = vx (t) dt dẋ(t) = ax (t) ẍ(t) = −rω 2 cos(ωt + ϕ0 ) = dt r ẋ(t) = −rω sin(ωt + ϕ0 ) = t [s] j t0= w0 oder man schreibt ẍ(t) = −ω 2 x(t) ⇒ ẍ(t) + ω 2 x(t) = 0 → gewöhnliche lineare Differenzialgleichung 2. Ordnung → Differenzialgleichungen i.A. ermöglichen Vorhersagen über den Verlauf physikalischer Systeme, wie z.B. bei einem Pendel Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 5 / 27 Physik für Ingenieure (Maschinenbau) Beschleunigung in rotierenden Systemen Man unterscheidet zwei Arten von Beschleunigungen – Winkelbeschleunigung, die zeitliche Änderung der Winkelgeschwindigkeit 1 dvT aT dω = ω̇ = = dt r dt r – Radialbeschleunigung auch bei einer konstanten Winkelgeschwindigkeit wirkt eine Beschleunigung auf den rotierenden Körper. Radialbeschleunigung: aR = ω 2 · r = r Dr j r(t2) Der Vektor ~aR ist dabei immer zum Mittelpunkt der Kreisbewegung gerichtet. Für ∆t geht ϕ → 0 und ∆v steht senkrecht zu v1 und zeigt somit zum Mittelpunkt v1 r(t1) v2T v2 v2 j v1 Dv Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 6 / 27 Physik für Ingenieure (Maschinenbau) Radialkraft Mit der Radialbeschleunigung ist auch eine Kraft verbunden, die ebenfalls ins Zentrum gerichtet ist Radialkraft: FR = m aZ = m v2T r (Zentripetalkraft) Für den Rotierenden existiert eine gleichgroß entgegengesetzte (Schein-)Kraft → Zentrifugalkraft Quelle: Computerbild.de Autor: Distelfalter Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 7 / 27 Physik für Ingenieure (Maschinenbau) Beispiel: Abstand Stern – Planet bestimmen 4 1 3 2 Helligkeit 2 3 1 4 Zeit FG Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 FR 8 / 27 Physik für Ingenieure (Maschinenbau) Federpendel m m Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 9 / 27 Physik für Ingenieure (Maschinenbau) Federpendel Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 10 / 27 Physik für Ingenieure (Maschinenbau) Fadenpendel Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 11 / 27 Physik für Ingenieure (Maschinenbau) Fadenpendel Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 12 / 27 Physik für Ingenieure (Maschinenbau) Zusammenfassung – jedes rotierende System ist ein beschleunigtes System → Radialbeschleunigung Translation Rotation Verknüpfung Weg: ~r Geschwindigkeit: ~v Beschleunigung: ~a Kraft: ~F = m~a Winkel: ϕ W.-Geschw.: ω = ϕ̇ W.-Beschl.: ω̇ = ϕ̈ ~ = Θω Drehmoment: M ~˙ s = rϕ v = rω a = rω̇ ~ = ~r × ~F M FR ω Federpendel Fadenpendel −D q x −mg sin ϕ q D m ω = 2π f = g l 2π T – Kenngrößen, wie ω, f und T, sind unabhängig von der Stärke der Auslenkung Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 13 / 27 Physik für Ingenieure (Maschinenbau) Quiz Ein Pendel ist über eine Rolle mit einem Federkraftmesser verbunden. Was zeigt der Kraftmesser im Vergleich zum ruhenden Pendel an, wenn das Pendel in Schwingung versetzt wird? Die Anzeige am Kraftmesser ändert sich nicht. Die Anzeige am Kraftmesser ändert sich im Rhythmus der Schwingung, sie ist in der Position 2 am größten. Die Anzeige am Kraftmesser ändert sich im Rhythmus der Schwingung, sie ist in den Positionen 1 und 3 am größten. Welche Aussage ist zu dem Zeitpunkt richtig, bei dem die maximale Auslenkung aus der Ruhelage einer Schwingung erreicht wird? Die Beschleunigung ist null. Die Geschwindigkeit hat ein Maximum. Die potentielle Energie hat ein Maximum. Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 14 / 27 Physik für Ingenieure (Maschinenbau) starre Körper – Unter einen starren Körper versteht man einen nicht-verformbaren ausgedehnten Körper – Entweder ist die Masse kontinuierlich über den Körper verteilt oder in diskreten Massenpunkte (z.B. Molekül) Anders als in der Punktmechanik – neben der Translation ist auch eine Rotation des Körpers möglich – Kräfte können an verschiedene Punkte des Körpers angreifen → Unterscheidung zwischen homogene und inhomogene Körper Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 15 / 27 Physik für Ingenieure (Maschinenbau) Dichte Dichte: ρ = m V [ρ] = kg m3 Siehe Ergänzungsübung F homogene Körper – die Masse ist gleichmäßig über das Volumen verteilt – die Dichte ist im ganzen Körpervolumen konstant inhomogene Körper – ungleichmäßige Massenverteilung – die Dichte ist nicht über das gesamte Volumen konstant – Bsp. gezinkter Würfel, der menschliche Körper, Schweizer Käse,... Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 16 / 27 Physik für Ingenieure (Maschinenbau) inhomogene Körper Zerlegung des Körpers in Volumenelemente mit homogener Dichte ∆Vi → ρi = ∆mi ∆Vi Beispiel: Die Erde lässt sich vereinfacht aus Schichten, mit konstanter Dichte, aufgebaut vorstellen 3 11 g/cm Erdkern 4,5 g/cm Erdkruste Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) Erdmantel 20. November 2013 3 2,8 g/cm3 17 / 27 Physik für Ingenieure (Maschinenbau) Bewegung starrer Körper – Zerlegung des Körpers in infinitesimale Volumina mit konstanter Dichte Für infinitesimale Volumina geht die Summe in ein Integral über ZZZ dm = ρ(r) dV → M = ρ(x, y, z) dx dy dz r – Für diese Massenstücke gelten nun die Überlegungen der Punktmechanik r – Summierung der jeweiligen Effekte, die auf die Massestücke wirken, um den Gesamteffekt des starren Körpers zu erhalten Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) dV 20. November 2013 18 / 27 Physik für Ingenieure (Maschinenbau) Drehmoment Das Drehmoment ist das Pendant zur der Kraft in der Translation, es beschleunigt oder bremst Drehbewegungen. ~ = ~r × ~F Drehmoment: M [M] = N · m (= b Energie) Das Drehmoment ist ein Vektor, welcher senkrecht auf ~r und ~F steht. Das Vorzeichen von M gibt dabei die Richtung der wirkenden Kraft an (im oder gegen den Uhrzeigersinn, Drei-Finger-Regel) In Worten ist das Drehmoment gleich der Kraft mal effektiver Hebelarm. Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 19 / 27 Physik für Ingenieure (Maschinenbau) Beispiele zum Drehmoment r F Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) Quelle: aus Telekolleg-Physik, BR 20. November 2013 20 / 27 Physik für Ingenieure (Maschinenbau) Addition von Drehmomenten Zwei gleiche Drehmomente und bezüglich des Drehsinns gleichgerichtete Drehmomente ergeben ein doppeltes Drehmoment F r F Zwei gleichgroße aber im Drehsinn entgegengesetzt gerichtete Drehmomente heben sich auf -F F r Ein Körper ist, in Bezug auf die Drehung, dann im Gleichgewicht, wenn alle angreifende Drehmomente zu Null kompensieren. P ~ sich Mi = ~0 i Experiment: Balkenwaage Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 21 / 27 Physik für Ingenieure (Maschinenbau) Hebel Die Balkenwaage oder die Spielplatzwippe sind gute Beispiele für ’zweiarmige Hebel’ Prinzip der Hebelwirkung: Mit kleinen Kräften und langem Hebelarm → große Lasten heben Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 22 / 27 Physik für Ingenieure (Maschinenbau) Hebel II einarmiger Hebel → Beide Kräfte greifen auf der gleiche Seite des Drehpunktes an Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 23 / 27 Physik für Ingenieure (Maschinenbau) Schwerpunkt Der Schwerpunkt ist ein ausgezeichneter Punkt eines Körpers, aber er muss sich nicht notwendigerweise im Körpervolumen befinden. Quelle: www.tripadvisor.co.uk Ist ein Körper im Schwerpunkt aufgehängt so kompensieren sich alle Drehmomente zu Null, bezüglich der Schwerkraft. Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 24 / 27 Physik für Ingenieure (Maschinenbau) Schwerpunkt II Bei einfachen Formen, lässt sich der Schwerpunkt aus der Geometrie leicht ableiten Bsp. Würfel, Kugel, Scheibe Experiment: Besenstiel Unregelmäßige und/oder inhomogeneP Körper kann man an verschiedenen Punkten aufhängen → In der Ruhestellung gilt Mi = 0. So läuft ein Lot vom Aufhängepunkt direkt durch den Schwerpunkt. Aus dem Schnittpunkt mehrerer Lote erhält man exakt die Position des Schwerpunktes. Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 25 / 27 Physik für Ingenieure (Maschinenbau) Gleichgewicht stabil labil indifferent – stabil – der Schwerpunkt befindet sich unter dem Drehpunkt – labil – der Schwerpunkt befindet sich über dem Drehpunkt – indifferent – Schwerpunkt und Drehpunkt fallen zusammen Ein physikalisches System ist dazu bestrebt den Zustand niedrigster Energie einzunehmen. Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 26 / 27 Physik für Ingenieure (Maschinenbau) Gleichgewicht stabil labil indifferent – stabil – der Schwerpunkt befindet sich unter dem Drehpunkt – labil – der Schwerpunkt befindet sich über dem Drehpunkt – indifferent – Schwerpunkt und Drehpunkt fallen zusammen Ein physikalisches System ist dazu bestrebt den Zustand niedrigster Energie einzunehmen. Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 26 / 27 Physik für Ingenieure (Maschinenbau) Gleichgewicht bei stehenden Objekten Verlässt das Lot unter dem Schwerpunkt eines Körpers die Standfläche, so kippt er um. Pendel, starre Körper, Dremoment (Ruhr-Universität Bochum) 20. November 2013 27 / 27