Kapitel 5 Grundgleichungen der Magnetostatik
Werbung

Kapitel 5
Grundgleichungen der Magnetostatik
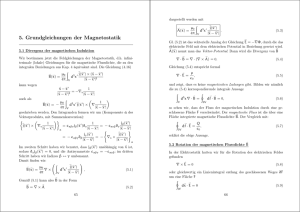
Wie im Fall des elektrostatischen Feldes, wollen wir die Gleichungen für das B-Feld in
differentialform schreiben.
5.1
Divergenz der magnetischen Induktion
Wir formen Gleichung (4.14)) um:
(r − r0 ) 0
dV
j(r ) ×
|r − r0 |3
Z
0
B(r) = (µo /4π)
V
Z
= − (µo /4π)
j(r0 ) × ∇r |r − r0 |−1
V
da ∇r nur auf r wirkt erhält man:
µ0
∇×
B(r) =
4π
Z
V
j(r0 )
dV 0
|r − r0 |
,
(5.1)
Gemäß (5.1) kann also B in der Form
B = ∇×A
(5.2)
dargestellt werden mit
µ0
A(r) =
4π
Z
V
j(r0 )
dV 0 .
0
|r − r |
(5.3)
A(r) nennt man das Vektor-Potential. Da ∇ · (∇ × A)= 0, erhält man
∇·B = 0 .
(5.4)
Gleichung (5.4) sollte mit ∇ · E(r) = ρ(r)
verglichen werden, und zeigt, dass es keine
0
magnetischen Ladungen gibt. Bilden wir nämlich die zu (5.4) korrespondierende integrale
Aussage
Z
I
∇ · B dV =
B · df = 0,
(5.5)
V
F
so sehen wir, dass der Fluss der magnetischen Induktion durch eine geschlossene Fläche
F verschwindet.
49
5.2
Rotation von B
In der Elektrostatik hatten wir gefunden
∇×E = 0
(5.6)
oder gleichwertig
I
E · ds = 0
(5.7)
S
nach der Formel von Stokes. Für das B-Feld haben wir aus (5.2)
∇ × B = ∇×(∇ × A) = ∇(∇ · A) − ∇2 A .
(5.8)
Wir zeigen zunächst, dass
∇·A=0 .
(5.9)
Beweis: aus (5.3):
µ0
∇r · A(r) =
4π
Z
0
0 −1
j(r ) · ∇r |r − r |
V
µ0
dV = −
4π
0
Z
j(r0 ) · ∇r0 |r − r0 |−1 dV 0 .
(5.10)
V
1
Unter Anwendung von (4.34) mit f (r0 ) = 1 und g(r0 ) = |r−r
0 | , gibt der letzte Ausdruck 0.
Wir benutzen jetzt eine Formel aus der Elektrostatik:
∇2
1
= −4πδ(r − r0 )
|r − r0 |
Wendet man den Laplace-Operator an (5.3) an, erhält man
Z
µ0
2
j(r0 )4πδ(r − r0 ) dV 0 = −µ0 j(r) .
∇ A(r) = −
4π V
(5.11)
Zusammen mit (5.8) und (5.9) bekommen wir:
∇ × B = µ0 j .
(5.12)
Die Integralform von (5.12) erhält man aus dem Stokschen Satz:
I
B · ds = µ0 I ,
(5.13)
S
wobei I die Stromstärke des von S umschlossenen Stromes ist. Bemerkung:
Umläuft S den Strom n-fach, so ist I durch nI zu ersetzen.
(5.12) und (5.4) bilden die grundlegende Gleichungen (Maxwell Gleichungen) für die Magnetostatik. Im Gegensatz zum elektrostatischen Feld E mit ∇×E = 0 ist also das B-Feld
nicht wirbelfrei.
50
5.3
Vektor-Potential und Eichung
In Kap. 5.1 haben wir eine Hilfsgröße eingeführt, das sogenannte Vektor-Potential A, aus
dem (ähnlich zum Fall des elektrostatischen Potential Φ) die magnetische Induktion durch
Differenzieren gewonnen werden kann. Im Gegensatz zum elektrostatischen Potential Φ,
ist A ein Vektorfeld, und B ist gegeben durch
B = ∇×A.
(5.14)
In (5.11) haben wir für das Vektor-Potential A eine Differentialgleichung gefunden, aus
der sich A bei gegebener Stromverteilung j berechnen lässt.
Coulomb-Eichung
Man muss allerdings beachten, dass die Beziehung (5.14) das Vektorpotential für gegebenes B nicht eindeutig festlegt. Das B Feld ändert sich nämlich nicht, wenn man eine
sogenannte Eichtransformation
A
⇒
A0 = A + ∇χ
(5.15)
durchführt, wobei χ eine beliebige (mindestens 2-mal partiell differenzierbare) skalare
Funktion ist. Denn:
∇ × A0 = ∇ × A + ∇ × (∇χ) = ∇A + 0.
(5.16)
(5.15) gibt eine zusätzliche Freiheit in der Wahl von A.
(5.3) ist daher nicht der einzige mögliche Ausdruck für A. Mit (5.3) ist (siehe (5.9)) A
divergenzfrei. Eine Wahl von A, welche (5.9) erfüllt wird als Coulomb-Eichung. bezeichnet.
Da die Physik nur von B und nicht von A abhängig ist, stellt die Wahl einer besonderen
Eichung keinerlei eine Einschränkung. In der Coulomb-Eichung (5.9) erfüllt also A [vgl.
(5.8), (5.12) und (5.9)] die Differentialgleichung:
∇2 A = −µ0 j
Coulomb−Eichung
.
(5.17)
Die vektorielle Gleichung (5.17) zerfällt in ihre 3 Komponenten, welche mathematisch
gesehen wieder vom bekannten Typ der Poisson-Gleichung (2.25) sind.
Startet man dagegen von einem Vektorpotential A, der die Coulomb-Eichung nicht
erfüllt
∇ · A 6= 0,
(5.18)
so kann man das Eichpotenital χ so wählen, dass
∇ · A0 = ∇ · A + ∇ · (∇χ) = 0 ,
(5.19)
so dass A die Coulomb-Eichung erfüllt. Das gesuchte χ findet man durch Lösen einer
Differentialgleichung vom Typ (2.25):
∇2 χ = −∇ · A,
wo −∇ · A als eine gegebene Inhomogenität anzusehen ist.
51
(5.20)
5.4
Multipolentwicklung
Analog zu der in Abschnitt 1.5 besprochenen Multipolentwicklung für das elektrische
Potential Φ interessiert man sich oft für das B-Feld in großer Entfernung von der Stromverteilung j. Letztere sei auf dem Volumen V (mit 0 ∈ V ) beschränkt.
Dann empfiehlt es sich, das Vektor-Potential A analog Φ in eine Taylorreihe zu entwickeln. Unter Vewendung von (5.3) und (1.29) erhalten wir
Z
r · r0
µ0
1
0
0
+ 3 + . . . = A0 (r) + A1 (r) + . . .
(5.21)
A(r) =
dV j(r )
4π V
r
r
mit dem
1.) Monopolanteil:
µ0
A0 (r) =
4πr
Z
j(r0 ) dV 0
(5.22)
V
als 1. Term der Entwicklung von A. Aus (4.34) mit f = 1 und g = xi folgt unmittelbar
A0 = 0 .
(5.23)
Was die Tatsache betont, dass es in der Elektrodynamik keine magnetischen Monopole
gibt.
2.) Dipolanteil:
µ0
A1 (r) =
4πr3
Z
(r · r0 ) j(r0 ) dV 0 .
(5.24)
V
Das Integral (5.24) kann gemäß (4.38) (mit B ersetzt durch r) umgeformt werden:
Z
Z
Z
1
1
0
0
0
0
0
0
0
0
(r · r )j(r ) dV =
{(r · r )j(r ) − (r · j(r )) r } dV =
{r × (j(r0 ) × r0 )} dV 0 .
2
2
V
V
V
(5.25)
(5.25) in (5.24) gibt
µ r 0
A1 (r) = m ×
(5.26)
4π r3
Z
1
mit dem magnetischen Dipolmoment m =
(r × j) dV (bereits in (4.40) eingeführt).
2 V
Man vergleiche das Ergebnis mit (1.32)!
Für das Dipol B-Feld erhält man (für r 6= 0)
µ0 (3r (m · r) − r2 m)
B1 (r) =
,
4π
r5
Beweis (für r 6= 0 !):
4π
∇ × A1 (r)
µ0
= ∇ × (m ×
52
r
)=
r3
(5.27)
r
r
= m(∇ · 3 ) −(m · ∇) 3 =
r
| {z r }
=0 für r6=0
1
1
= −r(m · ∇ 3 ) − 3 (m · ∇)r =
r
r
2
(3r (m · r) − r m)
=
r5
(5.28)
Das magnetische und elektrostatische Dipolfeld haben also die gleiche Form.
Mangetisches Moment vs. Bahndrehimpuls
Für N Punktladungen qi lautet m:
m =
N
1 X
qi (ri × vi ) .
2 i=1
(5.29)
Weiterhin kann m in einen einfachen Zusammenhang mit dem Drehimpuls L der N geladenen Massenpunkte gebracht werden, wenn alle Massen Mi = M und alle Ladungen
qi = q gleich sind, oder auch wenn das Verhältnis Mi /qi konstant ist. In diesem Fall:
q
L .
2M
m =
(5.30)
Mit dem Bahndrehimpuls L eines Systems geladener (identischer) Teilchen ist also ein
magnetisches Moment in Richtung von L verknüpft. Diese Aussage gilt auch im atomaren
Bereich, z.B. für die Elektronen eines Atoms.
Umgekehrt lässt sich jedoch nicht jedes magnetische Moment auf einen Bahndrehimpuls gemäß (5.30) zurückführen. Elementarteilchen (wie z.B. Elektronen) besitzen ein
inneres magnetisches Dipolmoment, welches nicht mit dem Bahndrehimpuls, sondern mit
dem Spin dieser Teilchen verknüpft ist durch:
ms = g
q
s,
2M
(5.31)
wobei s der Spin-Vektor ist und g das gyromagnetische Verhältnis. Es ist g ≈ 2.0024 für
Elektronen.
5.5
Energie eines Dipols im äußeren, schwach veränderliches Magnetfeld
Für die Kraft K eines schwach veränderlichen B-Feld auf eine um den Punkt r0 = 0
lokalisierte Stromverteilung greife man zurück auf (4.27), und entwickle das B-Feld um
r0 :
Z
Z
K = −B(r0 ) ×
j(r) × (r · ∇r0 )B(r0 )d V + · · · ,
j(r)d V +
V
(5.32)
V
Der erste Term verschwindet, wie in (5.22). Homogene Felder üben damit keine Kräfte auf
Ströme aus (Damit wird die Gesamtkraft auf dem Schwerpunkt gemeint). Den zweiten
53
Term formt man folgendermaßen um. Man betrachte zunächst, dass ∇r0 in (5.32) nur auf
B wirkt (das ist durch die Variabel r0 verdeutlicht) also:
Z
K = (r · ∇r0 )j(r) d V × B(r0 ) .
(5.33)
V
Aus (4.35) mit m 6= n geht man wie für (4.37), (4.38) vor und man bekommt
Z
(r · ∇r0 )j(r)d V × B(r0 ) =
ZV
1
[(r · ∇r0 )j(r) − (j(r) · ∇r0 )r] d V × B(r0 ) =
V 2
Z
∇r0 × ( 1 j(r) × r)d V × B(r0 ) =
2
|V
{z
}
(5.34)
−m
(m × ∇r0 ) × B(r0 ) =
∇r0 (m · B(r0 )) − m (∇r0 · B(r0 )) .
{z
}
|
=0
Wir haben also:
K = ∇(m · B) .
(5.35)
(5.35) sollte mit dem Ausdruck für den Drehmoment auf einem Dipol (4.39) verglichen
werden. Im letzteren Fall, liefert der erste Term in der Taylor-Entwicklung des B-Feldes
einen Beitrag. Deswegen enthält (4.39) das B-Feld und nicht einen Gradienten, wie in
(5.35).
Aus der Kraft lässt sich die Potentialenergie U eines magnetischen Dipols in einem
äußeren Magnetfeld ableiten. Da K = −∇U , bekommt man
U = −(m · B),
(5.36)
analog zu −(d · E) als Energie eines elektrischen Dipols im elektrostatischen Feld (2.38).
Der Dipol wird sich also bevorzugt in Feldrichtung einstellen, da dies der niedrigst möglichen Energie entspricht.
5.6
Energie des Magnetfeldes
Analog zur Elektrostatik, kann man den Ausdruck für die Potentialenergie einer Stromdichtenanordnung (4.48) als die Energie zum Aufbau des B-Feldes betrachten. Aus (5.3)
und (5.12) kann man (4.48) umschreiben als
Z
Z
Z
1
1
1
Um = −
d V j(r)·A(r) = −
d V A(r)·(∇×B(r)) =
d V B(r)·(∇×A(r)) ,
2 V
2µ0 V
2µ0 V
(5.37)
54
wo in der letzten Zeile eine partielle Integration und eine zyklische Permutation des Spatproduktes durchgeführt worden sind. Wir erhalten somit für die magnetische Energie
Z
1
Um =
d V |B(r)|2 ,
(5.38)
2µ0 V
zu vergleichen mit dem Ausdruck für die elektrostatische Energie (2.33).
um =
1
|B(r)|2
2µ0
ist somit die magnetische Energiedichte.
55
(5.39)
5.7
Übersicht über die Magnetostatik
1.) Basis: Ampère’sches Gesetz
K = q(v × B)
µ0
B =
4π
mit
Z
V
j(r0 ) × (r − r0 )
dV 0
|r − r0 |3
für stationäre Ströme, wobei ∇ · j = −∂ρ/∂t = 0.
2.) Feldgleichungen: Aus
B = ∇×A
µ0
A =
4π
mit
Z
V
j(r0 )
dV 0
|r − r0 |
folgt
a) differentiell:
∇ · B = 0;
∇ × B = µ0 j
b) integral
I
I
B · df = 0;
Fluß:
B · ds = µ0 I
Zirkulation:
S
F
3.) Vektor-Potential:
∇ × (∇ × A) = µ0 j
→
∇2 A = −µ0 j
für ∇ · A = 0 (Coulomb-Eichung).
4.) Feldenergie:
1
Um =
2µ0
Z
d V |B(r)|2 .
(5.40)
V
Statische Maxwell Gleichungen
(A)
∇·E=
ρ
0
(B)
∇·B=0
(5.41)
(C)
∇×E=0
(D)
∇ × B = µ0 j
Lorentz-Kraft
Z
K = q (E + v × B) ⇒ (ρ E + j × B) d V
56
(5.42)