Vortrag 10
Werbung

Das Theorem von Wigner und Eckart mit
Beispielen
Roman Schmitz
Hun Kim
Tim Langen
17.01.2005
Vortrag zum Seminar Teilchen, Symmetrien und Quantentheorie
1
Inhaltsverzeichnis
1 Einführung
1.1 Skalar- und Vektoroperatoren . . . . . . . . . . .
1.2 Das Wigner-Eckart-Theorem für Vektoroperatoren
1.3 Tensoroperatoren . . . . . . . . . . . . . . . . . .
1.4 Clebsch-Gordan Koeffizienten und 3j Symbole . .
2 Das
2.1
2.2
2.3
Theorem von Eckart
Theorem . . . . . . . .
Beweis . . . . . . . . .
Bemerkungen . . . . .
und
. . .
. . .
. . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
4
9
10
Wigner
12
. . . . . . . . . . . . . . . . . . . 12
. . . . . . . . . . . . . . . . . . . 12
. . . . . . . . . . . . . . . . . . . 14
3 Beispiele
3.1 Ein erstes Beispiel . . . . . . . . . . . . . . . . . .
3.2 Das Projektionstheorem . . . . . . . . . . . . . .
3.3 Berechnung des Landé - Faktors . . . . . . . . . .
3.4 Quadrupolwechselwirkung in deformierten Kernen
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
16
16
16
18
21
1
Einführung
1.1
Skalar- und Vektoroperatoren
Zu Beginn wollen wir einige grundlegende Begriffe definieren. Jeder Drehung
R im R3 kann bekanntlich eine unitäre Transformation D(R) im Hilbertraum
zugeordnet werden. Für einen beliebigen Operator A wird damit die klassische Rotation durch folgende Zuordnung ersetzt:
A → A′ = D(R) A D(R)†
Definition 1 (Skalarer Operator) Eine Observable A heißt Skalar, wenn
für beliebige Drehungen gilt:
A′ = D(R)A D(R)† = A
(1)
Bemerkungen und Beispiele:
~ A]=0. Das heißt insbesondere,
• Wie man zeigen kann, impliziert dies [J,
dass eine skalare Observable mit den drei Komponenten des Gesamtdrehimpulses vertauscht (Was wie wir sehen werden, einen Skalar von
einem Vektor unterscheidet)
• J~
2
ist ein Skalar
• Der Hamiltonoperator eines isolierten Teilchens ist ein Skalar
Eine vektorielle Observable V~ ist eine Menge von 3 Observablen Vi , die sich
bei Drehungen D(R) in der für Vektoren typischen Weise transformieren:
X
Vi → Vi′ = D(R)† Vi D(R) =
Rij Vj
j
Betrachtet man nun infinitesimale Rotationen und setzt sie in diese Gleichung ein, so erkennt man, dass in Analogie zu einem skalaren Operator für
~ bestimmte charakteristische Kommutatorrelationen
jede Komponente von V
gelten müssen (Die genaue Argumentation findet man z.B. in [4] Sakurai,
S.232f). Die genannten Relationen lassen sich auch auf beliebige endliche
Drehungen verallgemeinern, deshalb können wir sie für folgende Definition
verwenden:
3
Definition 2 (Vektoroperator) Eine Observable V~ heißt Vektoroperator,
wenn für ihren Kommutator mit dem Drehimpuls folgendes gilt:
[Ji , Vj ] = i~ ǫijk Vk
(2)
Bemerkungen und Beispiele:
• Betrachtet man den bekannten Kommutator [Ji , Jj ] = i~ ǫijk Jk erkennt
man, dass der Drehimpuls selbst ein Vektoroperator ist
• Das Skalarprodukt zweier Vektoroperatoren ist ein Skalar
1.2
Das Wigner-Eckart-Theorem für Vektoroperatoren
Wir können nun bereits einen Spezialfall des Wigner-Eckart-Theorems betrachten. Dazu definieren wir die folgenden Operatoren:
V± = V1 ± iV2
J± = J1 ± iJ2
Aus der Definition eines Vektoroperators [Ji , Vj ] = i~ ǫijk Vk folgen für einen
~ die Vertauschungsrelationen:
beliebigen Vektoroperator V
[J1 , V± ] = [J1 , V1 ] ± i[J1 , V2 ] = ±i[J1 , V2 ] = ∓~V3
[J2 , V± ] = [J2 , V1 ] ± i[J2 , V2 ] = −i~V3
[J3 , V± ] = [J3 , V1 ] ± i[J3 , V2 ] = i~V2 ± i(−i~V1 ) = ±~V±
(3a)
(3b)
(3c)
Damit können wir folgende Kommutatoren berechnen:
[J+ , V+ ] = [J1 , V+ ] + i[J2 , V+ ] = −~V3 + i(−i~V3 ) = 0
[J+ , V− ] = [J1 , V− ] + i[J2 , V− ] = ~V3 + i(−i~V3 ) = 2~V3
[J− , V+ ] = [J1 , V+ ] − i[J2 , V+ ] = −~V3 − i(−i~V3 ) = −2~V3
[J− , V− ] = [J1 , V− ] − i[J2 , V− ] = +~V3 − i(−i~V3 ) = 0
(4a)
(4b)
(4c)
(4d)
Außerdem erinnern wir an die wichtigen Eigenwertgleichungen für die Leiteroperatoren des Drehimpules und für dessen 3-Komponente:
p
(5a)
J± |j, mi = ~ j(j + 1) − m(m ± 1)|j, m ± 1i
J3 |j, mi = m~|j, mi
(5b)
4
Nun wollen wir zwei Lemmata beweisen, um daraus Auswahlregeln für den
Operator V~ zu gewinnen:
Lemma 1.1 Für alle m 6= m′ gilt:
hn, j, m|V3 |n′ , j ′ , m′ i = 0
Beweis: Es gilt [J3 , V3 ] = 0
⇒ hn, j, m|J3 V3 |n′ , j ′ , m′ i = hn, j, m|V3 J3 |n′ , j ′ , m′ i
⇔ m~hn, j, m|V3 |n′ , j ′ , m′ i = m′ ~hn, j, m|V3 |n′ , j ′ , m′ i
⇔ (m − m′ )~hn, j, m|V3 |n′ , j ′, m′ i = 0
⇒ ∀m 6= m′ : hn, j, m|V3 |n′ , j ′ , m′ i = 0
Lemma 1.2 Die Matrixelemente hn, j, m|V± |n′ , j ′ , m′ i sind nur dann ungleich null, wenn m − m′ = ±1 gilt.
Beweis: Aus Gleichung (3c) folgt J3 V± = V± J3 ± ~V±
⇒ J3 (V± |n′ , j ′ , m′ i)
= V± J3 |n′ , j ′ , m′ i ± ~V± |n′ , j ′ , m′ i
= (m′ ± 1)~V± |n′ , j ′ , m′ i
⇒ V± |n′ , j ′ , m′ i ist Eigenvektor zu J3 mit Eigenwert (m′ ± 1)~
Da zwei Eigenvektoren des Operators J3 mit unterschiedlichen Eigenwerten
orthogonal zueinander sind, muss das Skalarprodukt hn, j, m|V± |n′ , j ′ , m′ i für
m 6= m′ ± 1 verschwinden.
Bemerkung:
• V± |n, j, mi muss nicht proportional zu |n, j, m±1i sein. Es gilt lediglich
XX
V± |n, j, mi =
cn′ j ′ |n′ , j ′ , m ± 1i
n′
j′
Damit man die Summation über j’ weglassen dürfte, wäre es notwendig,
dass V± mit J~2 vertauscht, was aber im allgemeinen nicht der Fall ist.
5
Die gewonnenen Auswahlregeln fassen wir noch einmal zusammen:
m − m′ = 0
m − m′ = +1
m − m′ = −1
(für V3 )
(für V+ )
(für V− )
Durch diese Auswahlregeln ist bereits die Form der Matrizen, die die Ein~ auf einen Unterraum H(n, j) darstelschränkungen der Komponenten von V
len, festgelegt:
• Die Matrixdarstellung von V3 ist diagonal
• Die zu V± gehörenden Matrizes haben nur direkt über bzw. unter der
Hauptdiagonalen Matrixelemente die ungleich null sind.
Wir wollen nun zunächst die Matrixelemente von V+ und V− untersuchen.
Weil J+ und V+ vertauschen (Gl.4a), kann man für das Matrixelement ihres
Kommutators zwischen den Vektoren hn, j, m + 2| und |n, j, mi schreiben:
hn, j, m + 2|J+ V+ |n, j, mi = hn, j, m + 2|V+ J+ |n, j, mi
Fügt man auf beiden Seiten die Vollständigkeitsrelation
X
|n′ , j ′ , m′ ihn′ , j ′ , m′ | = 1
n′ ,j ′ ,m′
ein, so erhält man die Matrixelemente
hn, j, m + 2|J+ |n′ , j ′ , m′ ihn′ , j ′, m′ |V+ |n, j, mi
= hn, j, m + 2|V+ |n′ , j ′ , m′ ihn′ , j ′ , m′ |J+ |n, j, mi
(6)
Aufgrund der Orthonormalität der Basis |n, j, mi sind diese nur dann von
Null verschieden, wenn n=n’, j=j’ und m’=m+1 gilt, denn mit Gl.5a gilt:
hn, j, m + 2|J+ |n′ , j ′ , m′ i =
=
p
j ′ (j ′ + 1) − m′ (m′ + 1) hn, j, m + 2|n′ , j ′ , m′ + 1i
p
~ j ′ (j ′ + 1) − m′ (m′ + 1) δn,n′ δj,j ′ δm,m′ −1
~
Mit diesem Wissen können wir als erstes Zwischenergebnis folgendes Lemma
beweisen:
Lemma 1.3 Die Matrixelemente des Aufsteigeoperators V+ zu einer beliebigen vektoriellen Observable V innerhalb eines Unterraums H(n, j) sind proportional zu denen des Operators J+ , d.h. es gilt für beliebige m und m’:
hn, j, m|V+ |n, j, m′ i = α+ (n, j)hn, j, m|J+ |n, j, m′ i
6
(7)
Beweis: Setzen wir die gerade gewonnen Auswahlregeln in Gl.6 ein, so folgt:
hn, j, m + 2|J+ |n, j, m + 1ihn, j, m + 1|V+ |n, j, mi
= hn, j, m + 2|V+ |n, j, m + 1ihn, j, m + 1|J+ |n, j, mi
hn, j, m + 1|V+ |n, j, mi
hn, j, m + 2|V+ |n, j, m + 1i
=
hn, j, m + 1|J+ |n, j, mi
hn, j, m + 2|J+ |n, j, m + 1i
⇒
Mit der bekannten Auswahlregeln |△m| ≤ j sieht man, dass diese Gleichung
nur solange Sinn macht, wie folgende Ungleichung erfüllt ist:
−j ≤ m ≤ j − 2
Setzen wir die erlaubten Werte für m ein, folgt:
hn, j, −j + 1|V+ |n, j, −ji
hn, j, −j + 1|J+ |n, j, −ji
hn, j, −j + 2|V+ |n, j, −j + 1i
= ...
hn, j, −j + 2|J+ |n, j, −j + 1i
hn, j, m + 1|V+ |n, j, mi
= ...
=
hn, j, m + 1|J+ |n, j, mi
hn, j, j|V+ |n, j, j − 1i
=
hn, j, j|J+ |n, j, j − 1i
:= α+ (n, j)
=
Für beliebige m gilt also:
hn, j, m + 1|V+ |n, j, mi = α+ (n, j)hn, j, m + 1|J+ |n, j, mi
Aus den Auswahlregeln folgt aber, dass alle Matrixelemente hn, j, m|J+ |n, j, m′ i
und hn, j, m|V+ |n, j, m′ i für △m = m − m′ 6= 1 verschwinden, also nur genau
die Matrixelemente ungleich null sind, für die gerade gezeigt wurde, dass sie
proportional zueinander sind. Daher gilt für beliebige m und m’:
hn, j, m|V+ |n, j, m′ i = α+ (n, j)hn, j, m|J+ |n, j, m′ i
Bemerkung:
• α+ (n, j) hängt zwar von n und j ab, aber nicht von m.
• Eine analoge Rechnung liefert das gleiche Ergebnis für den Zusammenhang zwischen V− und J− :
hn, j, m|V− |n, j, m′ i = α− (n, j)hn, j, m|J− |n, j, m′ i
7
(8)
Nun wollen wir versuchen für V3 ein ähnliches Ergibniss zu finden.
Lemma 1.4 Für die Matrixelemente von V3 gilt:
hn, j, m|V3 |n, j, m′ i = α(n, j)hn, j, m|J3 |n, j, m′ i
(9)
Beweis: Betrachten wir [J− , V+ ] = −2~V3 (Gl.4c). Daraus folgt:
−2~hn, j, m|V3 |n, j, mi = hn, j, m|(J− V+ − V+ J− )|n, j, mi
p
= ~ j(j + 1) − m(m + 1)hn, j, m + 1|V+ |n, j, mi
p
− ~ j(j + 1) − m(m − 1)hn, j, m|V+ |n, j, m − 1i
α+ (n, j) p
⇒ hn, j, m|V3 |n, j, mi = −
{ j(j + 1) − m(m + 1)hn, j, m + 1|J+ |n, j, mi
2
p
− j(j + 1) − m(m − 1)hn, j, m|J+ |n, j, m − 1i}
=−
α+ (n, j)
~ {j(j + 1) − m(m + 1) − j(j + 1) + m(m − 1)}
2
⇒ hn, j, m|V3 |n, j, mi = ~mα+ (n, j)
Geht man alternativ von der Vertauschungsrelation [J+ , V− ] = 2~V3 (Gl.4b)
aus und führt eine analoge Rechnung aus, so ergibt sich:
hn, j, m|V3 |n, j, mi = ~mα− (n, j)
Daraus folgt die Gleichheit der Koeffizienten α+ (n, j) und α− (n, j), sodass
wir nun nicht mehr zwischen ihnen unterscheiden müssen:
α+ (n, j) = α− (n, j) ≡ α(n, j)
Die zu J+ gehörende Matrix ist diagonal, womit sich für beliebige m und m’
ergibt:
hn, j, m|V3 |n, j, m′ i = α(n, j)hn, j, m|J3 |n, j, m′ i
~ ist
Damit haben wir bereits unser Ziel erreicht, denn jede Komponente von V
eine Linearkombination von V+ , V− und V3 . Daher können wir die bisherigen
Ergebnisse zu folgendem Satz zusammenfassen:
Satz 1 (Theorem von Eckart und Wigner für Vektoroperatoren)
Innerhalb des Unterraumes H(n, j) sind alle Matrixelemente eines Vektor~ proportional zu denen des Gesamtdrehimpulses J.
~
operators V
~ |n, j, m′ i = α(n, j) hn, j, m| J~ |n, j, m′ i
hn, j, m| V
8
(10)
1.3
Tensoroperatoren
Nachdem wir Skalar- und Vektoroperatoren untersucht und bereits einen
Sonderfall des Wigner-Eckart-Theorems für diese Operatoren kennengelernt
haben, sollen diese Begriffe nun erweitert werden. Wir führen dazu den allgemeineren Begriff des Tensoroperators ein, der durch sein Transformationsverhalten unter Drehungen definiert wird. Wir wollen allerdings nur irreduzible
Tensoroperatoren betrachten.
(κ)
Definition 3 (Tensoroperator) Ein Satz von (2κ + 1) Operatoren Tµ
heißt irreduzibler Tensoroperator der Stufe κ
:⇔
⇔
′
Tµ(κ)
=D
†
Tµ(κ)
κ
X
D=
′
Tµ(κ) = D Tµ(κ) D † =
ν=−κ
κ
X
(κ)⋆
Dµν
Tν(κ)
(11a)
(κ)
Dµν
Tν(κ)
(11b)
ν=−κ
Bemerkungen und Beispiele:
• Für die Indizes gilt κ ∈ N0 , µ ∈ [−κ, +κ]
• Je nachdem welche der beiden äquivalenten Definitionen D † (Gl. 11a)
oder D (Gl. 11) man für die Drehung verwendet, spricht man von einem
kontravarianten oder einem kovarianten Tensoroperator
• Auch für Tensoroperatoren findet man typische Kommutatorrelationen:
p
(κ)
κ(κ + 1) − µ(µ ± 1) Tµ±1
[J± , Tµ(κ) ] =
J3 , Tµ(κ) = µTµ(κ)
• Die bekannte Kopplung von Vektoroperatoren wird bei Tensoroperatoren durch folgende Zuordnung ersetzt:
X
′
(j ′ )
Cσ(λ) ≡ [A(κ) ⊗ B (j ) ]σ(λ) :=
hκj ′ , µ m|λσiAµ(κ) Bm
µ,m
• Ein skalarer Operator ist ein Tensoroperator nullter Stufe, ein Vektoroperator ein Tensoroperator der Stufe 1
(l)
• Die Kugelfunktionen Ylm (x̂) entsprechen einem Tensorfeld Tm (~x), das
invariant unter Rotationen ist:
X
(l)⋆
Tm(l) (~x′ ) =
Dµν
Tν(l) (~x)
ν
9
1.4
Clebsch-Gordan Koeffizienten und 3j Symbole
Wir wollen an dieser Stelle kurz auf die Clebsch-Gordan Koeffizienten und
ihre Darstellung durch Wignersche 3j-Symbole eingehen, da sie für alles Folgende von großer Bedeutung sein werden. Dazu betrachten wir die Summe
zweier Drehimpulse J = J1 + J2 . Es seien zwei irreduzible Darstellungen
der Drehgruppe gegeben, die von den Zuständen |j1, m1i und |j2, m2i aufgespannt werden. Die Produktzustände |j1, m1i|j2, m2i sind ebenfalls eine
Darstellung der Drehgruppe, aber diese Darstellung ist reduzibel. Da die
Vereinigung aller Darstellungen vollständig ist, können die Produktzustände
nach irreduziblen Darstellungen entwickelt werden. Anschaulisch gesprochen
ist diese Entwicklung nichts anderes als eine Basistransformation. Sowohl
χ = {J12 , J13 , J22 , J23 } als auch ζ = {J 2 , J12 , J22 , J3 } sind vollständige Sätze
kommutierender Observablen, so dass ihre Eigenvektoren als Basis für den
Produktraum verwendet werden können. Um die Eigenvektoren des Satzes
χ in der Basis von ζ darzustellen1 , entwickelt man sie einfach nach dessen
Basisvektoren:
X
hj1 m1 , j2 m2 |jmi|j1 , m1 i|j2 , m2 i
(12)
|jmi =
m1 ,m2
|j1 m1 , j1 m2 i =
X
j,m
hj1 m1 , j2 m2 |jmi|jmi
(13)
Definition 4 (Clebsch-Gordan Koeffizienten) Den Faktor hj1 m1 , j2 m2 |jmi
bezeichnen wir als Clebsch-Gordan Koeffizient.
Bemerkungen:
• Die Clebsch-Gordan Koeffizienten sind reell und für Hin- und Rücktransformation ergibt sich jeweils der gleiche Koeffizient
• Es gibt bestimmte Auswahlregeln, auf die wir aber erst nach der nächsten
Definition eingehen werden
Wir führen nun eine neue Notation für die Clebsch-Gordan Koeffizienten ein,
die sogenannten Wignerschen 3j-Symbole, auf die sich auch die Auswahlregeln übertragen:
Definition 5 (3j-Symbole) 3j-Symbole dienen zu einfachen Darstellung
der Clebsch-Gordan Koeffizienten und können auf folgende Weise mit diesen verknüpft werden:
1
Das gleiche gilt natürlich auch umgekehrt, d.h. (..) um die Eigenvektoren des Satzes
ζ in der Basis von χ darzustellen (...)
10
hj1 m1 , j2 m2 |j3 m3 i = (−1)
j2 −j1 −m3
p
j1 j2
j3
2j3 + 1
m1 m2 −m3
(14)
Bemerkungen:
• Die 3j Symbole sind invariant unter zyklischen Permutationen
• Sie verschwinden, falls eine der Auswahlregeln
j1 + j2 + j3 = n
|j1 − j2 | ≤ j3 ≤ |j1 + j2 |
m1 + m2 + m3 = 0
n ∈ N0
(15a)
(15b)
(15c)
nicht erfüllt ist
• Sowohl die Clebsch-Gordan-Koeffizienten als auch die 3j-Symbole können
natürlich berechnet werden ([1] Scheck, S.30 oder [6] Edmonds, S.61f),
sie sind aber auch in vielen Formelsammlungen zu finden. In Tabelle 1
sind einige Fälle aufgeführt.
j′
j 0
=
m′ −m 0
′
′
(−1)j −m
√ ′
2j +1
δjj ′ δm,m′
j−m
j 1 j
= √(−1) m
j(2j+1)(j+1)
−m 0 m
j 2 j
3m2 −j(j+1)
= (−1)j−m √
j(2j+1)(2j−1)(j+1)(2j+3)
−m 0 m
= (−1)j−m √
= (−1)j−m √
j
j 1
m −m 0
j
j 2
m −m 0
m
j(2j+1)(j+1)
2[3m2 −j(j+1)]
(2j+3)(2j+2)(2j+1)(2j)(2j−1)
Tabelle 1: Einige 3j-Symbole
11
2
Das Theorem von Eckart und Wigner
Wir kommen nun zu einem der wichtigsten Theoreme der Quantenmechanik.
Sehr oft ist es nötig Matrixelemente von Tensoroperatoren zwischen Eigenzuständen des Drehimpulses zu berechnen. Das folgende Theorem reduziert
die Berechnung dieser Matrixelemente auf die Berechnung eines einzigen Matrixelements und liefert zusätzlich noch einige Auswahlregeln.
2.1
Theorem
Satz 2 (Theorem von Eckart und Wigner) Für die Matrixelemente eines Tensoroperators in Bezug auf Eigenzustände des Drehimpulses gilt:
hj, m|Tµ(κ) |j ′ , m′ i
= (−1)
j−m
j κ j′
(jkT (κ) kj ′ )
−m µ m′
(16)
Den Proportionalitätsfaktor (jkT (κ) kj ′ ) bezeichnet man als reduziertes Matrixelement, in der englischsprachigen Literatur oft auch als double-bar ma”
trix element“. Der Satz sagt aus, dass die gesamte Abhängigkeit der Matrixelemente eines Tensoroperators von allen magnetischen Quantenzahlen in
einem Vorzeichen und einem 3j-Symbol enthalten ist. Somit sind alle solchen
Matrixelemente zueinander proportional und ihre Verhltnisse haben universelle Werte, die nicht von der Art des Operators abhängen.
2.2
Beweis
(κ)
Sei Tµ (~x) ein unter Rotation invariantes, irreduzibles Tensorfeld, d.h.
X
(κ)⋆ (κ)
Tµ(κ) (~x ′ ) =
Dµν
Tν (~x)
ν
Definieren wir nun einen weiteren irreduziblen Tensor:
Z
(κ)
Fµ := d3 x Tµ(κ) (~x)
12
Dieser Tensor verhält sich unter Rotationen wie folgt:
Z
(κ)
Fµ
=
d3 x Tµ(κ) (~x ′ )
Z
X
(κ)⋆
=
Dµν
d3 x Tν(κ) (~x)
ν
=
X
⋆
(κ)
Dµν
Fν(κ)
ν
(κ)
Die Komponenten von Fµ sind also in allen Bezugssystemen dieselben.
Gleichzeitig ist aber D (κ) irreduzibel. Also gilt ∀ κ 6= 0:
Fµ(κ) = 0
Wir betrachten nun das zu berechnende Matrixelement:
Z
′
⋆
(κ) ′
hj, m|Tµ |j , m i = d3 x ψjm
Tµ(κ) ψj ′ m′
=
Z
⋆
d3 x ψjm
λ,σ
= (−1)j−m
Z
= (−1)j−m
Z
= (−1)j−m
= (−1)
X
hκµ, j ′ m′ |λσi[T (κ) ⊗ ψj ′ ]σ(λ)
j−m
Z
⋆
d3 x (−1)j−m ψjm
{z
}
|
=:φj,−m
d3 x φj,−m
X
λ,σ
d3 x
XX
λ,σ τ,ω
XX
λ,σ τ,ω
X
λσ
hκµ, j ′ m′ |λσi[T (κ) ⊗ ψj ′ ]σ(λ)
hκµ, j ′m′ |λσi[T (κ) ⊗ ψj ′ ]σ(λ)
hj(−m), λσ|τ ωihκµ, j ′m′ |λσi(φj ⊗ [T (κ) ⊗ ψj ′ ](λ) )ω(τ )
′
′
hj(−m), λσ|τ ωihκµ, j m |λσi
Z
d3 x (φj ⊗ [T (κ) ⊗ ψj ′ ](λ) )ω(τ )
Der Faktor rechts ist nichts anderes, als ein rotationsinvarianter Tensoroperator, wie wir ihn gerade untersucht haben:
Z
(τ )
Fω ≡ d3 x φj ⊗ T (κ) ⊗ ψj ′
Wie wir bereits wissen, verschwindet er für alle τ 6= 0. Wegen der Definition
eines Tensoroperators ist daher auch ω = 0. Es gilt für den zweiten Clebsch-
13
Gordan-Koeffizienten:
√
j λ 0
2·0+1
hj, −m, λσ|0 0i = (−1)
−m σ 0
1
= (−1)j+m √
δjλ δmσ
2j + 1
λ−j
und damit
X
X
(−1)j+m
hκµ, j ′ m′ |λσihj, −m, λσ|0 0i =
hκµ, j ′m′ |λσi √
δjλ δmσ
2j + 1
λσ
λσ
(−1)j+m
hκµ, j ′ m′ |jmi
= √
2j + 1
√
κ j′
j
j+m
j ′ −κ−m 2j + 1
√
= (−1)
(−1)
2j + 1 µ m′ −m
j κ j′
j+m
j ′ −κ−m
= (−1)
(−1)
−m µ m′
Definieren wir den Faktor
′
(0)
(−1)j−κ+j F0
=: (jkT (κ) kj ′ )
als reduziertes Matrixelement, so erhalten wir für das zu berechnende Matrixelement den gesuchten Ausdruck:
XX
hj, m|Tµ(κ) |j ′ , m′ i = (−1)j−m
hj(−m), λσ|τ ωihκµ, j ′m′ |λσiFω(τ )
λ,σ τ,ω
= (−1)j−m
X
λ,σ
= (−1)
j−m
(0)
hj(−m), λσ|0 0ihκµ, j ′m′ |λσiF0
j+m
j ′ −κ−m
j κ j′
(0)
F0
−m µ m′
(−1)
(−1)
j κ j′
j−m
(jkT (κ) kj ′ )
= (−1)
−m µ m′
2.3
Bemerkungen
• Alternativ findet man für das Theorem in der Literatur auch oft die
folgende Notation ohne 3j-Symbol:
(jkT (κ)kj ′ )
hj, m|Tµ(κ) |j ′ , m′ i = (−1)j+m hj ′ , m′ , κµ|j, mi √ ′
2j + 1
14
(17)
Die Matrixelemente sind also proportional zu einem Clebsch-GordanKoeffizient, was natürlich mit der Proportionalität zu einem 3j-Symbol
äquivalent ist.
• Die Definition des reduzierten Matrixelementes
Z
(κ) ′
j−κ+j ′
d3 x φj ⊗ T (κ) ⊗ ψj ′
(jkT kj ) := (−1)
(18)
erlaubt es uns dieses zu berechnen, jedoch bringt das Wigner-EckartTheorem auch den Vorteil mit sich, in umgekehrter Reihenfolge vorgehen zu können. Man berechnet das Matrixelement
−1
j κ j′
(κ) ′
−(j−m)
hj, m|Tµ(κ) |j ′ , m′ i
(19)
(jkT kj ) = (−1)
−m µ m′
zunächst für einen einfachen Spezialfall und braucht es dann für alle
weiteren Fälle nur noch ins Theorem einzusetzen.
15
3
3.1
Beispiele
Ein erstes Beispiel
Wir können, wie bereits in 1.3 bemerkt, einen skalaren Operator S als einen
(0)
Tensoroperator nullter Stufe T0 auffassen. Dann gilt mit (Gl. 16) für die
Matrixelemente dieses Operators
j 0 j′
′
′
j−m
(jkSkj ′ )
hj, m|S|j , m i = (−1)
−m 0 m′
′
j
j 0
j−m
(jkSkj ′ )
= (−1)
m′ −m 0
(jkSkj ′)
= √ ′
δjj ′ δm,m′
2j + 1
Den numerischen Wert für das 3j-Symbol findet man in Tabelle 1. Das Ergebnis lässt sich leicht verstehen: S wirkt nur auf |j ′ , m′ i. Aus den Auswahlregeln
für die 3j-Symbole folgt aber, dass das 3j-Symbol verschwindet, wenn j’ oder
m’ geändert werden. Daher ist das Matrixelement immer null, es sei denn
der Operator lässt j’ und m’ unverändert.
3.2
Das Projektionstheorem
Für den Fall, dass j=j’ gilt, vereinfacht sich das Wigner-Eckart Theorem
für Vektoroperatoren zum sogenannten Projektionstheorem. Betrachen wir
~ . Seine Einschränkung auf den Unterraum H(n, j) aus
einen Operator J~ · V
Eigenvektoren wird durch
~ P(n, j)
P(n, j) J~ · V
gegeben. Mit P(n, j) bezeichnen wir dabei den Projektionsoperator auf H(n, j):
P(n, j) ≡ |n, j, mi hn, j, m′ |
wobei m und m’ beliebige Werte annehmen können. Für die Projektion von
V~ auf diesen Unterraum gilt dann:
~ P(n, j) = |n, j, mihn, j, m′ |V
~ |n, j, mihn, j, m′ |
P(n, j)V
= α(n, j)|n, j, mihn, j, m′ |J~ |n, j, mihn, j, m′ |
= α(n, j)P(n, j)J~ P(n, j)
16
(20)
Man überprüft leicht einige Eigenschaften des Projektionsoperators:
~ P(n, j)] =
[J,
=
=
J~|n, j, mihn, j, m′ | − |n, j, mihn, j, m′ |J~
~2 j(j + 1)|n, j, mihn, j, m′ | − ~2 j(j + 1)|n, j, mihn, j, m′ |
0
(P(n, j))2 = |n, j, mi hn, j, η|n, j, µihn, j, m′ |
{z
}
|
δη,µ
′
= |n, j, mihn, j, m | = P(n, j)
Aus diesen Eigenschaften folgt insbesondere
~
P(n, j) J~ P(n, j) = J(P(n,
j))2 = J~ P(n, j)
und daher gilt mit (Gl.20):
~ P(n, j) = J~[P(n, j) V~ P(n, j)]
P(n, j) J~ · V
= α(n, j) J~2 P(n, j)
= α(n, j) j(j + 1)~2 P(n, j)
~ auf H(n, j) ist proportional zum Projektionsd.h. die Projektion von J~ · V
operator P(n, j). Daraus können wir folgern, dass innerhalb des Unterraums
~ in jedem beliebigen Zustand gleich ist:
H(n, j) der Erwartungswert J~ · V
~ in,j = hn, j, m|J~ · V
~ |n, j, mi = α(n, j) j(j + 1)~2
hJ~ · V
⇒
α(n, j) =
~ in,j
~ in,j
hJ~ · V
hJ~ · V
=
j(j + 1)~2
hJ~2 in,j
Damit ergibt sich das Projektionstheorem:
Satz 3 (Projektionstheorem) Betrachten wir Zustände aus dem Unter~
raum H(n, j), so sind alle Vektoroperatoren proportional zum Drehimpuls J:
~ in,j
hJ~ · V
V~ =
J~
2
~
hJ in,j
17
(21)
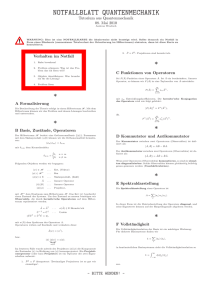
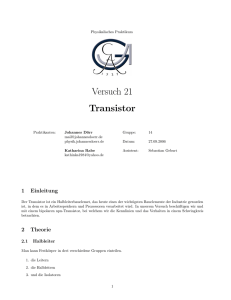
Dieses Ergebnis hat auch eine klassische physikalische Interpretation, die in
Abbildung 1 dargestellt ist. Wenn J~ den Gesamtdrehimpuls eines abgeschlossenen physikalischen Systems bezeichnet, führen alle physikalischen Größen
des Systems eine Präzessionsbewegung um den konstanten Vektor J~ aus. Insbesondere verbleibt für eine vektorielle Größe V~ nach Mittelung über die Zeit
~|| auf J:
~
nur ihre Projektion V
~ ~
~|| = J · V J~
V
~2
|J|
J
V
V
Abbildung 1: Präzession einer vektoriellen Größe um den Drehimpuls
3.3
Berechnung des Landé - Faktors
Im Folgenden wollen wir das Wigner-Eckart-Theorem benutzen, um den Ein~ auf die Energieniveaus eines Atoms zu befluss eines magnetischen Feldes B
rechnen.
2
~ S-Typ
~
Betrachten wir dazu ein System mit Drehimpulskopplung vom L·
ist,
was für eine leichten Atomen der Fall ist. Dazu führen wir folgende Größen
ein:
P
~ =
~
• L
i Li : Gesamtbahndrehimpuls
~ =P S
~
• S
i i : Gesamtspin
2
Diese Kopplung ist auch als Russell-Saunders-Kopplung bekannt. Es addieren sich
~ und die einzelnen Bahndrehimpulse
zunächst die einzelnen Spins zu einem Gesamtspin S
~ Deren Kopplung J~ = L+
~ S
~ ergibt dann die Observable
zu einem Gesamtbahndrehimpuls L.
Gesamtdrehimpuls
18
~ +S
~ : Gesamtdrehimpuls3
• J~ = L
• H0 : Hamilton-Operator des Systems ohne Magnetfeldes.
~ 2, S
~ 2 , J~2 , J3 } bilden einen vollständigen Satz kommutierender Ob• {H0 , L
servablen
• |E0 , l, s, j, mi bezeichnen die gemeinsamen Eigenvektoren dieses Satzes
von Observablen zu den Eigenwerten E0 , l(l+1)~2 , s(s+1)~2 , j(j +1)~2
und m~
Der Hamiltonoperator H0 des Systems ist ein Skalar und vertauscht des~ Dahalb, wie bereits in Kapitel 1 bemerkt, mit jeder Komponente von J.
her vertauscht er offensichtlich auch mit J±, woraus folgt, dass der Zustand J± |E0 , l, s, j, mi Eigenzustand von H0 zum Eigenwert E0 ist. Außerdem sieht man mit (Gl.5a), dass sich aus dem betrachteten Zustand noch
weitere Zustände mit derselben Engergie konstruieren lassen. Die Anzahl
dieser zusätzlichen Zustände ist jedoch durch die üblichen Auswahlregeln für
den Drehimpuls begrenzt4 . Der Energiezustand E0 ist also (2j+1)-fach entartet.
Bemerkungen:
• Es können aufgrund des Zentralpotentials noch zusätzliche zufällige
Entartungen auftreten
• In der Atomphysik bezeichnet man das (2j+1)-fach entartete Energieniveau auch als Multiplett
Betrachten wir nun Zustände im Unterraum H(E0 , l, s, j), der von den
{|E0 , l, s, j, mi} mit m=-j,...,j aufgespannt wird. In Gegenwart eines äußeren
~ parallel zur 3-Achse müssen wir zum Hamiltonoperator des
Magnetfeldes B
Systems einen Term ergänzen, der die Wechselwirkung mit dem Magnetfeld
beschreibt5 :
H = H0 + H1
H1 = ωL (L3 + 2S3 )
3
(22a)
(22b)
Unter der Annahme, dass der Spin des Atomkerns Null ist
Es muss immer gelten: −j ≤ m ≤ j
5
Die Beschreibung der Wechselwirkung durch einen zusätzlichen Term wird durch die
Störungstheorie gerechtfertigt, solange B klein ist
4
19
Dabei stammt der Faktor 2 vor dem Spinoperator aus dem gyromagnetischen
Verhältnis, ωL bezeichnet man als Lamor-Frequenz, µB ist das Bohrsche Magneton:
qB
µB
ωL = −
=− B
2m
~
Es gilt nach dem Projektionstheorem, dass sowohl der Gesamtbahndrehimpuls als auch der Gesamtspin proportional zum Gesamtdrehimpuls sind:
~ =
L
~ =
S
1
~
hL
j(j+1)~2
1
~
hS
j(j+1)~2
· J~il,s,j · J~
(23)
~ l,s,j · J~
· Ji
(24)
Für die Erwartungswerte folgt:
~2
[j(j + 1) − l(l + 1) − s(s + 1)]
2
~2
= s(s + 1)~2 + [j(j + 1) − l(l + 1) − s(s + 1)]
2
~ · Ji
~ l,s,j = l(l + 1)~2 +
hL
~ · Ji
~ l,s,j
hS
Dies ist leicht einzusehen, wenn wir jeweils die Definition des Gesamtdrehimpulses einsetzen:
~ · J~ = L
~ · (L
~ + S)
~ = L
~ 2 + 1 /2 (J~2 − L
~2 − S
~ 2)
L
~ · J~ = S
~ · (L
~ + S)
~ = S
~ 2 + 1 /2 (J~2 − L
~2 − S
~ 2)
S
Kehren wir nun wieder zum Störterm des Hamiltionian in Gl.22 zurück und
setzen Gl.23 und Gl.24 ein, so erhalten wir:
!
~ · Ji
~
~ · Ji
~
2hS
hL
+
J3
H1 = ωL (L3 + 2S3 ) = ωL
j(j + 1)~2 j(j + 1)~2
ωL
=
{l(l + 1) + 1 /2 (j(j + 1) − l(l + 1) − s(s + 1)) +
j(j + 1)
+2s(s + 1) + j(j + 1) − l(l + 1) − s(s + 1)}J3
3
j(j + 1) + 12 s(s + 1) − 21 l(l + 1)
= ωL
j(j + 1)
3 s(s + 1) − l(l + 1)
J3
+
= ωL
2
2j(j + 1)
≡ g j ω L J3
2
J3
Dabei haben wir den Faktor gj eingeführt, den wir als Landé - Faktor des
betrachteten Multipletts bezeichnen.
20
gj =
3 s(s + 1) − l(l + 1)
+
2
2j(j + 1)
(25)
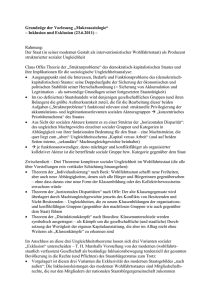
Aus H1 = gj ωL J3 folgt, dass es sich bei den Eigenzuständen von H1 gerade
um die Basisvektoren |E0 , l, s, j, mi des betrachteten Unterraums H(E0 , l, s, j)
mit den zugehörigen Eigenwerten E1 (m) = gj m~ωL handelt. Das Magnetfeld
hebt die Entartung des Multipletts also vollständig auf und es entsteht ein
Satz von (2j+1) äquidistanten Energieniveaus, die zu den möglichen Werten
von m gehören. Die Energiedifferenz dieser neuen Energieniveaus, die auch
in Abbildung 2 dargestellt sind, ist sowohl zum Landé - Faktor, als auch
zum äußeren Magnetfeld B proportional. Außerdem ist noch zu bemerken,
dass der Landé - Faktor darüberhinaus auch den Zusammenhang zwischen
Drehimpuls und magnetischem Moment eines Teilchens beschreibt.
m
E
5
2
3
2
1
2
e0
5
j= 2
1
2
3
2
5
2
Abbildung 2: Aufhebung der 6-fachen Entartung eines Multipletts mit j =
durch ein statisches Magnetfeld
3.4
5
2
Quadrupolwechselwirkung in deformierten Kernen
Betrachten wir nun eine Anwendung aus der Atomphysik. Sei beispielsweise
K⋆ ein angeregter Kern der Gammastrahlung emittiert und in seinen Grundzustand K zurückfällt.
K⋆ → K + γ
21
Seien j und j’ die Spins6 vor und nach der Emission. In der Strahlungstheorie
zeigt man, dass die Wahrscheinlichkeitsamplitude für die Emission von γStrahlung mit der Polarisation ν in Richtung x̂ proportional zu folgendem
Matrixelement ist:
hj, m′ |H(x̂, ν)|j, mi
Der Operator H(x̂, ν) kann nach Kugelfunktionen entwickelt werden. Dabei
treten als Multipolmomente das sogenannte magnetische Dipolmoment M
und das Quadrupolmoment Q auf. Letzteres wollen wir nun näher betrachten.
Das statische Quadrupolmoment des Kerns ist definiert als:
r
Z
Z
16π 2 ∞
e
dr dΩ ρjj (~x)r 2 Y20 (θ, φ)
Q0 :=
5
0
wobei mit ρjj (~x) die Protondichte bezeichnet sei. Für einen Kern mit Z Protonen ist diese gegeben als:
ρjj (~x) = hj, m = j|
Z
X
n=1
δ(~x − ~xn )|j, m = ji
Betrachtet man den Spezialfall m=j und setzt diesen Ausdruck in die Definition von Q0 ein so ergibt sich:
Q0 =
r
=
r
16π 2
e
5
Z
0
∞
dr
Z
dΩ hj, j|
Z
X
Z
X
n=1
δ(~x − ~xn )r 2 Y20 (θ, φ)|j, ji
16π 2
e hj, j|
rn2 Y20 (x̂n )|j, ji
5
n=1
Die allgemeinen Matrixelemente können wir nun mit dem Eckart-Wigner
Theorem berechnen:
r
Z
X
16π 2
′
hj, m |Q|j, mi =
e hj, m′ |
rn2 Y2µ (x̂n )|j, mi
5
n=1
r
16π 2
j
2 j′
j−m′
=
(jkY2 kj)
e (−1)
−m′ µ m
5
6
Das ist in diesem Fall, wo nur der Atomkern betrachtet wird, natürlich gleichbedeutet
mit dem Gesamtdrehimpuls
22
Das reduzierte Matrixelement lässt sich einfach mit Hilfe des eben betrachteten Spezialfalles berechnen:
−1
Z
X
j 2 j
hj, j|
rn2 Y20 (x̂n )|j, ji
(jkY2kj) = (−1)
−j 0 j
n=1
−1 r
5 −2
j 2 j
e Q0
=
−j 0 j
16π
j−j
Für das allgemeine Matrixelement gilt also:
−1
j 2 j
j
2 j
′
j−m′
hj, m |Q|j, mi = Q0 (−1)
−j 0 j
−m′ µ m
Die Auswahlregeln sagen uns, dass das reduzierte Matrixelement die Dreiecksungleichung erfüllen muss, daher kann j nur Werte grösser oder gleich 1
annehmen. Desweiteren muss die Auswahlregel m′ = µ + m erfüllt sein. In
der Quadrupol-Hyperfeinstruktur treten Erwartungswerte in den Zustnden
|jmi auf. Daher ist die Auswahlregel in unserem Fall nur für µ = 0 erfüllt.
Setzt man die numerischen Werte für die 3-j Symbole ein (siehe Tabelle 1),
so erhällt man:
−1
j 2 j
j 2 j
j−m
hj, m|Q|j, mi = Q0 (−1)
−m 0 m
−j 0 j
2
3m − j(j + 1)
= Q0 [(−1)j−m ]2 p
·
j(2j + 1)(2j − 1)(j + 1)(2j + 3)
p
j(2j + 1)(2j − 1)(j + 1)(2j + 3)
−(j−j)
· (−1)
3j 2 − j(j + 1)
3m2 − j(j + 1)
= Q0 2
3j − j(j + 1)
Das Endergebnis lautet also:
hj, m|Q|j, mi = Q0
3m2 − j(j + 1)
j(2j − 1)
(26)
Weitere Erläuterungen zu diesem speziellen Beispiel, sowie ein weiterführendes Beispiel zur Anwendung des Wigner-Eckart-Theorems zur Berechnung
von Spin-Bahnzuständen findet man in [1] (Scheck, S.34f).
23
Literatur
[1] F. Scheck: Theoretische Physik 4, Springer-Verlag 1999
[2] F. Scheck: Theoretische Physik 2, Springer-Verlag 1999
[3] C. Cohen-Tannoudji, B. Diu, F. Laloë: Quantenmechanik, deGruyter
1999
[4] J.J. Sakurai: Modern Quantum Mechanics, Addison-Wesley 1994
[5] A. Messiah: Mécanique Quantique, Dunod 1995
[6] A.R. Edmonds: Drehimpulse in der Quantenmechanik, BI Hochschultaschenbücher 1964
[7] U. Fano, A.R.P. Rau: Symmetries in Quantum Physics, Academic Press
1996
Die aktuelle Version dieses Dokuments wurde
am 6. Februar 2005 mit LATEX und AMS-Math erstellt.
Fehler gefunden? eMail an [email protected] schicken. DANKE
24