Piezoelektrischer dynamischer Bi-Moden-Aktor.
Werbung

Piezoelektrischer dynamischer
Bi-Moden Aktor für
feinwerktechnische Anwendungen
Inhalt
Piezoeffekt und Materialien
Unterteilung von Piezomotoren
Charakteristiken des Bi-Moden-Aktors(PiezoWave™)
Funktionsprinzip des Bi-Moden-Aktors
Design & Simulation
Messtechnik
Performance-Daten
Elektronische Ansteuerungen
Applikationen
Firmenüberblick
Gegründet am 1. Februar 1991 wurde PMDM als Joint Venture zwischen den Firmen
Minebea Co. Ltd. in Japan (führender Hersteller von Miniaturkugellagern) und der Papst
KG in Deutschland (damals führender Hersteller für Spindelmotorentechnologie)
Der Firmensitz in Villingen-Schwenningen ist das größte Motoren-Entwicklungszentrum
im internationalen Verbund der japanischen Minebea Co. Ltd., Tokio.
260 Mitarbeiter am Standort PMDM; 53.000 weltweit
Spezialisiert auf die Entwicklung von elektrischen Antrieben für verschiedene
Produktfelder
Piezoeffekt und Materialien
Inverser Piezoeffekt
• Blei-Zirkonat-Titanate (PZT) und
• Blei-Magnesium-Niobate (PMN) Niedervoltaktoren.
Blockaktor
(Multilayer)
Biegeaktor
(Bimorph o. Multilayer)
Plattenstapel
(Multilayer)
Ringaktoren
Biegeringe
Ringstapel
(Multilayer)
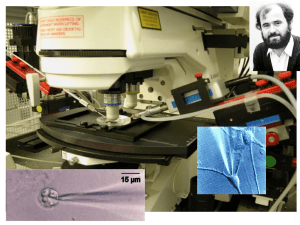
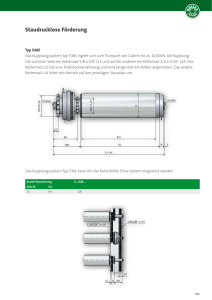
Charakteristiken des PiezoWave™-Aktors
Eigenschaften eines Piezo-Ultraschallmotors:
Elektrische Anregung des Aktors im Nahresonanzbereich mit einer bestimmten Frequenz (70 - 100 kHz „Ultraschall“)
Kraftübertragung zwischen antreibendem und angetriebenem Teil durch Reibkontakt.
Kleine Bewegungen am Aktor selbst werden in große Bewegungen der Antriebsstange gewandelt.
Geschwindigkeiten bis 300 mm/s möglich
Selbsthaltung durch Haftreibung im stromlosen Zustand
8 mm
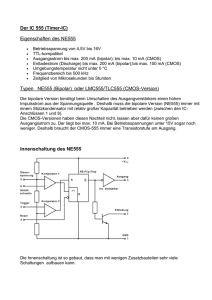
Unterteilung von Piezomotoren
Piezoelectric Motors
Quasistatic Motors
Stepping
principle
Ultrasonic Motors
Inertial
principle
Standing
Wave
Bidirectional
Systems with 2 or
more actuators
PiezoWave™Motor
Traveling
Wave
Unidirectional
Single-actuator
systems
Quasistatic Motors:
Stepping principle: Inchworm principle, Piezo Walk Drive
Inertial principle: Konica Minolta
Ultrasonic Motors:
Traveling Wave:
Shinsei Motor; Physik Instrumente
Standing Wave:
Unidirectional: Cylindrical stator
Bidirectional: SQUIGGLE, Physik Instrumente
PiezoWave
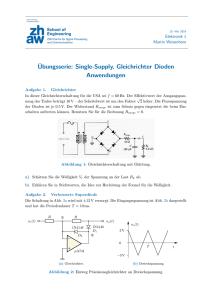
Funktionsprinzip
Spring
Pivot
support
Drive
Pad
Drive element
Spring Force
Drive pad
Rod (moving element)
Drive pad
Drive
Rail
Moving direction
Drive element
Zwei verschiedene Schwingungsmoden sind für das Funktionsprinzip notwendig (2nd bending
mode & lift-up mode).
Eine Überlagerung beider Schwingungsformen resultiert in einer elliptischen Bewegung am
Drive-Pad und durch die Reibungskopplung in einer Linearbewegung des Drive-Rails.
2nd bending mode
Spring Force
Piezo
Element
Lift-up mode
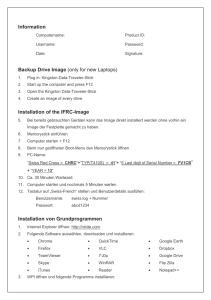
Funktionsprinzip
Funktionsprinzip - Piezoelement
GND
VCC
Biegesektion 1
Biegesektion 2
GND
9
1
8
7
Voltage [V]
6
5
Phase A
Phase B
4
GND
VCC
3
A
2
2
1
0
0
100
200
300
400
500
600
-1
Angle [°]
VCC
Polarization direction in the several layers indicated
by red arrows
Design & Simulation des Aktors
Simulationen im Designprozess
1.
Ermittlung der Eigenmoden des Aktors.
a)
Analytische Berechnung
b)
FEM-Simulation
2.
Ermittlung der Impedanz bzw. Admittanz und Ableitung von Güte und elektrischen Ersatzparametern.
3.
Frequenzabhängige Analyse zur Ermittlung der Aktorauslenkung und resultierenden Motorgeschwindigkeit.
4.
Simulationen zur Ermittlung der Stromaufnahme im Frequenz- und Zeitbereich.
5.
Auslegung des Federdesigns und resultierender Federkraft für die optimale Vorspannung des Aktors.
Definition der Aktorgeometrie
Ermittlung des dynamischen
Verhaltens
nein
Kraft-Geschwindigkeitsverhalten
Entsprechend Zielsetzung ???
nein
Strom- und
Leistungsaufnahme
o.k. ???
Applikationsentwickluung
Design & Simulation des Aktors
Material
Piezoelektrische Simulationen in ANSYS werden entsprechend folgenden Zustandsgleichungen durchgeführt:
{T } = [c E ]{S }− [e]{E}
{D} = [e]t {S }+ [ε S ]{E}
Für eine Finite Elemente Analyse in ANSYS ist es notwendig die Materialdaten in tensorieller Form einzugeben. Folgende Materialdaten sind dabei
erforderlich:
Elastizitäts- bzw. Nachgiebigkeits-Koeffizienten
s
E −1
= c
=
E
11
E
12
E
11
s
s
[s ] [ ]
E
E
13
E
13
E
33
s
s
s
0
0
0
0
0
0
E
66
0
E
s44
s
1
EX
0
0
0
=
0
0
E
s44
−ν xy
−ν xz
EY
EZ
−ν yz
1
EY
EZ
1
EZ
0
0
0
0
0
0
1
0
G XY
1
GYZ
0
0
0
0
0
1
G XZ
Ladungs- bzw. Spannungskonstanten
0
0
0
[d ] =
0
0
d15
0
0
0
0
d15
0
d 31
d 31
d 33
0
0
0
Permittivitäten
0
0
0
[e] =
0
0
e15
0
0
0
0
e15
0
e31
e31
e33
0
0
0
optional: Dielektrischer Verlustwinkel
[ε ]
S
0
ε 11 0
= 0 ε 33 0
0
0 ε 11
tan δ
Design & Simulation des Aktors
Güte, Dämpfung und elektrische Ersatzparameter
Berechnung der Eigenmoden
Berechnung des Impedanzverlaufs
Admittance of A-GND Section
4,00E-02
3,50E-02
Admittance [1/Ohm]
3,00E-02
2,50E-02
2,00E-02
1,50E-02
1,00E-02
Ableitung folgender Daten aus der Impedanzanalyse:
• Güte und Dämpfung des Aktors
• Skalenfaktor für die Berechnung der
äquivalenten Ersatzparameter
• Kinetische- und Potentielle Energie für die
Berechnung der effektiven Masse und
effektiven Steifigkeit
5,00E-03
0,00E+00
70000 72000 74000 76000 78000 80000 82000 84000 86000 88000 90000 92000 94000 96000 98000 10000
0
Frequency [Hz]
VCC
Lm
Lm
Rm
Rm
Cm
Cm
C0
Rd
C0
Rd
Phase B
Phase A
Lm
Lm
Rm
Rm
Cm
Cm
C0
C0
Rd
GND
Rd
Design & Simulation des Aktors
Trajektorien und Geschwindigkeit
Berechnung der elliptischen Trajektorien und Ableitung der Geschwindigkeit
PMAB Element @ 8V & damping = 0,34 Ns/m
1,00E-07
8,00E-08
%UY-75
%UY-76
%UY-77
6,00E-08
4,00E-08
%UY-78
%UY-79
%UY-80
%UY-81
%UY-82
UY [m]
2,00E-08
-4,00E-06
-3,00E-06
-2,00E-06
0,00E+00
-1,00E-06
0,00E+00
1,00E-06
2,00E-06
3,00E-06
4,00E-06
-2,00E-08
%UY-83
%UY-84
-4,00E-08
%UY-85
%UY-86
%UY-87
-6,00E-08
%UY-90
%UY-88
%UY-89
-8,00E-08
-1,00E-07
UX [m]
No-Load Speed of PiezoWave™-Actuator
Geschwindigkeitsprofil und Mittelwert der Antriebsschiene bei einer Frequenz
von 85 kHz und 8V
0,4
0,50
0,35
0,40
0,3
Speed-Avg.
0,10
S p e e d [ m /s ]
Speed [m /s]
speed profile-85 kHz
0,20
0,00
0,00E+00
Mean-Speed-meas-8V PMAB
0,25
0,30
%Mean_Speed no Damp
0,2
%Mean_Speed Damp 0,34 Ns/m
PMAB-8V
0,15
0,1
0,05
5,00E-06
1,00E-05
1,50E-05
2,00E-05
2,50E-05
3,00E-05
3,50E-05
0
70000
-0,10
Time [s]
75000
80000
85000
Frequency [Hz]
90000
95000
100000
Messtechnik
Admittance
Impedanzmessung
→ Messung der benötigten Schwingungsmoden
0,03
0,025
Admittance [S]
0,02
0,015
0,01
0,005
Weg & Geschwindigkeit
0
70000 72000 74000 76000 78000 80000 82000 84000 86000 88000 90000 92000 94000 96000 98000 1E+05
→ Messung von effektiver Motorgeschwindigkeit und Weg in
Frequency [Hz]
Abhängigkeit der angelegten Spannung, Frequenz,
Zyklenzahl und Last.
Strom- bzw. Leistungsaufnahme
Motor 43, center-Position
0,5
0,4
0,3
→ Messung der maximalen Stellkraft bei mechanischem Kurzschluss
0,2
Stall Force [N]
Stellkraft
43_6V_cen
0,1
43_7V_cen
0
-0,1
0
5000
10000
15000
43_8V_cen
20000
43_9V_cen
-0,2
-0,3
-0,4
-0,5
Tim e [m s]
Haltekraft
→ Messung der Haltekraft (Reibungskraft) im stromlosen Zustand.
force [N]
Friction measurement - Motor 10
2,0
1,9
1,8
1,7
1,6
1,5
1,4
1,3
1,2
1,1
1,0
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0,0
0
500
1000
1500
path [µm]
2000
2500
3000
Messtechnik
Admittance
0,03
0,025
Admittance [S]
0,02
0,015
0,01
0,005
0
70000 72000 74000 76000 78000 80000 82000 84000 86000 88000 90000 92000 94000 96000 98000 1E+05
Frequency [Hz]
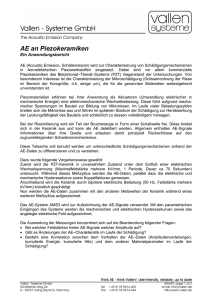
Piezomotor – Performance
typ. Spannung
Geschwindigkeit (ohne Last)
Strom
Geschwindigkeit (5g Last)
Stellkraft
Haltekraft (unbestromt)
Weg
Masse
Temperaturbereich (indoor)
Ausgangssignal Positionssensor
8 mm
6
>100
80
>75
0,25
0,35
2,3
0,7
0°C - 45°C
+/- 80
10
>150
150
>125
V
mm/s
mA
mm/s
N
N
mm
g
mV
Applikationen
Linearaktoren für Schließsysteme
Linsenverstellungen für Mobiltelefone, DSC-Cameras, Scannersysteme…
Antriebe für Mikropumpen
Blenden- bzw. Shutter für optische Systeme
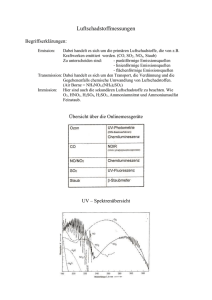
Elektron. Ansteuerung
(buffered half bridge)
Block Diagramm des AAT 4900 “Buffered half bridge”
Für eine Motorschaltung werden folgende Bauteile benötigt:
2 x AAT 4900 (SOT23- or IJS-package)
2 x Induktivität = 22 – 33µH
4 x Diode 1N4148
9
2 x Kondensator = 1µF
8
7
Voltage [V]
6
5
Phase A
Phase B
4
GND
VCC
3
2
1
0
0
100
200
300
-1
Angle [°]
400
500
600
Elektron. Ansteuerung
(Schaltung mit PIC12 µC)
Spannungsregler
Schmitt-Trigger mit Inverter
PIC 12
Elektron. Ansteuerung
(single driver NSD-2101 and dual driver NSD-1202 )
Vielen Dank für ihre Aufmerksamkeit!