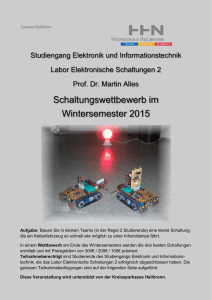
3. Gleichrichterschaltungen
Werbung

Gleichrichterschaltungen 3-1 3. Gleichrichterschaltungen 3.1 Einführung Zur Speisung von Antrieben stehen heute meist Wechsel- oder Drehstromnetze zur Verfügung, Gleichstromnetze sind quasi "ausgestorben". Nur in ortsveränderlichen Anlagen , z. B. in Kraftfahrzeugen oder bei Notstromaggregaten gibt es für Gleichstromantriebe noch eine direkte Gleichstromversorgung aus einer Batterie oder einer Brennstoffzelle. Drehzahlveränderliche Antriebe - unabhängig davon, ob es sich um einen Gleichstrom- oder Drehstromantrieb handelt – werden heute allgemein über Stromrichter aus dem 50Hz-Wechsel- oder Drehstromnetz gespeist. Letztlich wird auch eine chemische Batterie über Stromrichter geladen; entweder aus dem Netz oder, wie beim Kraftfahrzeug, über den der Drehstromlichtmaschine nachgeschalteten Gleichrichter. Das folgende Bild zeigt eine Auswahl der Möglichkeiten, Stromrichter zur Drehzahlveränderung einzusetzen. Die Antriebstechnik wird deshalb weitgehend durch die Leistungselektronik bestimmt. Aufgabe der Leistungselektronik ist das kontaktlose Schalten, Steuern, Regeln und Umformen elektrischer Energie. Als elektronische Schalter (Ventile) werden folgende Halbleiterbauelemente in den Leistungsteilen der Stromrichter eingesetzt: ¾ Dioden: ¾ Transistoren: bipolare (LTR), unipolare (MOSFET) und heute hauptsächlich der Mischtyp IGBT (Insulated Gate Bipolar Transistor) ¾ Thyristoren: normale Netz-Thyristoren, schnelle Frequenz-Thyristoren, abschaltbare GTOThyristoren (Gate Turn Off) oder IGC-Thyristoren (Insulated Gate Controlled) und rückwärtsleitende Thyristoren ¾ Triacs (antiparallele Thyristoren): X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-2 Über die Leistungen, Betriebsfrequenzen und Einsatzgebiete verschafft das folgende Bild einen Überblick. In der Stromrichtertechnik unterscheidet man Gleichrichter, Gleichstromumrichter, Wechselrichter und Wechselstromumrichter. ¾ Gleichrichter formen eine Wechselspannung in eine beliebige Gleichspannung um. ¾ Gleichstromumrichter formen eine Gleichspannung in eine andere beliebige Gleichspannung um. ¾ Wechselrichter formen eine Gleichspannung in eine beliebige Wechselspannung um. ¾ Wechselstromumrichter formen eine Wechselspannung in eine andere beliebige Wechselspannung um. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-3 Die Richtung des Energieflusses für die einzelnen Umformarten ist im folgenden Bild dargestellt: In diesem Kapitel werden die Gleichrichterschaltungen behandelt. Gleichrichterschaltungen unterteilt man in ungesteuerte (uncontrolled) und gesteuerte (controlled) Gleichrichter. Die zur Gleichrichtung verwendeten Halbleiterbauelemente nennt man allgemein Ventile. Bei ungesteuerten Gleichrichtern sind das Dioden. Die Ausgangsspannung ist deshalb nicht frei einstellbar, sondern wird durch die Amplitude der Eingangsspannung und die Art der Schaltung bestimmt. Bei gesteuerten Gleichrichtern werden Bauelemente verwendet, bei denen man den Zeitpunkt des Übergangs vom Sperrzustand in den Durchlasszustand verändern kann (z.B. bei Thyristoren). Dadurch ist die Höhe der Ausgangsspannung einstellbar. Merke: Werden die Dioden von Gleichrichterschaltungen durch Thyristoren ersetzt, kann die Ausgangsspannung durch Wahl des Zündzeitpunktes verändert werden. Beim Zündwinkel α = 0° ist die Ausgangsspannung genauso groß wie bei einer ungesteuerten Schaltung. 3.2 X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-4 Einpuls-Einwegschaltung E1 Wird in die E1-Schaltung eine Diode eingesetzt, so ist die Schaltung ungesteuert, man spricht dann von einer E1U (Uncontrolled). Durch den Einsatz eines steuerbaren Ventils (z.B. Thyristor) kommt man zu der gesteuerten Schaltung E1C (Controlled). a) E1U mit ohmscher Last UN = Netzspannung US = Strangspannung UV = Ventilspannung (vernachlässigt) Ud = Gleichspannung Id = Gleichstrom X2EE, TECEN 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-5 BEGRIFFE: Arithmetischer Mittelwert Ud (UAV) 90° 180° 270° 360° 450° 540° Merke: Der arithmetische Mittelwert wird so bestimmt, dass die waagerecht schraffierte Fläche unter der Kurve ud für eine Periodendauer in ein flächengleiches Rechteck (senkrecht schraffiert) der Höhe Ud umgewandelt wird. ûS Ud = E1U mit ohmscher Last: U d = 0, 45 ⋅U S π = 2 ⋅U S Bei der E1U gilt: π Arithmetischer Mittelwert Id (IAV) Den arithmetischen Mittelwert des Stromes kann man mit Hilfe des ohmschen Gesetzes bestimmen. Id = Ud RL Messung des arithmetischen Mittelwertes Arithmetische Mittelwerte können mit folgenden Messgeräten bestimmt werden: Drehspulmessgerät: Betrieb im DC-Bereich, wie bei einer Gleichspannungs- bzw. Gleichstrommessung Elektronisches Messgerät: Betriebsartschalter auf "Mean" bzw. "AV" (Average) Oszilloskop: X2EE, TECEN beim Wechsel von AC auf DC springt die Kurve um den arithmetischen Mittelwert X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-6 Effektivwert Udeff Der Effektivwert ist der quadratische Mittelwert einer zeitlich veränderlichen Spannung bzw. Stromes. 90° 180° 270° 360° 450° 540° Merke: Der Effektivwert wird so bestimmt, dass die waagerecht schraffierte Fläche unter der Kurve ud2 für eine Periodendauer in ein flächengleiches Rechteck (senkrecht schraffiert) der Höhe Udeff2 umgewandelt wird. ( 2 ⋅U ) = 2 ⋅U 2 2 deff ûS2 = = 4 S Bei der E1U gilt: U E1U mit ohmscher Last: U deff = 0, 707 ⋅U S 4 4 bzw. 2 S U S2 = 2 I deff = U deff RL Bemerkung: Der Effektivwert setzt als Mittelwert in einem Widerstand während einer Periode die gleiche elektrische Leistung um wie ein Gleichstrom derselben Größe. Formfaktor F Der Formfaktor ist das Verhältnis aus Effektivwert und arithmetischem Mittelwert. Bei der E1U gilt: X2EE, TECEN F= U deff Ud = 0, 707 ⋅U S = 1, 57 0, 45 ⋅U S X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-7 Messung des Effektivwertes Effektivwerte können mit folgenden Messgeräten bestimmt werden: Drehspulmessgerät: auf AC-Bereich Drehspulmessgeräte sind so ausgelegt, dass sie die Effektivwerte von sinusförmigen Größen richtig anzeigen. Bei anderen Formen, z.B. bei der Ausgangsspannung einer E1U wird der Effektivwert nicht korrekt angezeigt. Elektronisches Messgerät: Betriebsartschalter auf Stellung "RMS" RMS steht für Root Mean Square und weist auf die quadratische Mittelwertbildung hin Dreheisenmessgerät: Heizdrahtmessgerät Drehspulmesswerk mit Thermoumformer Beispiel: Eine Wechselspannung U = 230V / 50Hz wird über eine E1U gleichgerichtet. Berechne den arithmetischen Mittelwert sowie den Effektivwert der gleichgerichteten Spannung. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-8 b) E1C mit ohmscher Last Die Diode wird durch einen Thyristor mit Zündschaltung ersetzt. Der Steuerwinkel kann von α = 0° bis α = 180° kontinuierlich eingestellt werden. Durch den Zündimpuls (z. B. bei α = 60°) wird der Thyristor leitend. Bei ωt = 180° wird der Haltestrom des Thyristors unterschritten und das Ventil sperrt wieder bis es in der nächsten Periode wieder gezündet wird. X2EE, TECEN 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-9 Wird der Thyristor nicht zu Beginn der Halbwelle (α = 0°, d.h. Vollaussteuerung) sondern bei einem bestimmten Steuerwinkel α gezündet, verringert sich der arithmetische Mittelwert Udα der Ausgangsspannung nach der folgenden Formel. E1C mit ohmscher Last: U dα = U d 0 ⋅ 1 + cos α 2 mit U d 0 = 0, 45 ⋅U S Ud0 = arithmetischer Mittelwert bei Vollaussteuerung (α = 0°, wie bei der E1U) Beispiel: Ein ohmscher Widerstand von 150Ω wird über eine E1C an eine Wechselspannung von 400V gelegt. Bestimme die arithmetischen Mittelwerte Udα und Idα bei einem Steuerwinkel von 60°. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-10 Übung: Ein ohmscher Widerstand RL = 150Ω wird über eine E1C an eine Wechselspannung US = 212V gelegt. Der Steuerwinkel beträgt α = ___________ . Zeichne über zwei Perioden die zeitlichen Verläufe von uS, udα und idα. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-11 c) E1C mit ohmsch-induktiver Belastung Die gemischt ohmsch-induktive Belastung ist die in der Praxis am häufigsten auftretende Belastungsart. Wird der Thyristor zu einem bestimmten Zeitpunkt gezündet (z. B. bei α = 90°), so springt die Ausgangsspannung auf den Momentanwert der Eingangsspannung. Die Induktivität verhindert, dass der Strom sprunghaft ansteigen kann. Der Strom steigt deshalb allmählich bis zu seinem Höchstwert an. Erreicht die Spannung bei 180° ihren Nulldurchgang, so versucht die Induktivität den Stromfluss in gleicher Richtung aufrecht zu erhalten. Der Thyristor bleibt während der negativen Halbwelle der Eingangsspannung eingeschaltet, bis der Haltestrom unterschritten wird. An den Ausgangsklemmen kommt es zu sogenannten negativen Spannungs-Zeit-Flächen. Während der negativen Spannungs-Zeit-Flächen wird die in der Induktivität gespeicherte Energie wieder an das Netz zurückgeliefert. udα ωt 90° 180° 270° 360° 90° 180° 270° 360° uS, idα ωt X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-12 Steuerkennlinie Die Steuerkennlinie stellt die Abhängigkeit der Gleichspannung Udα der gesteuerten Schaltung vom Steuerwinkel α für die verschiedenen Belastungsfälle dar. Die Gleichspannung Udα wird dabei auf den Wert Ud0 bezogen. Ud0 ist dabei die Spannung einer ungesteuerten Schaltung bzw. die Spannung einer gesteuerten beim Steuerwinkel α = 0°. Im folgenden Bild ist die Steuerkennlinie einer E1C für ohmsche Belastung dargestellt. Beispiel: Ein ohmscher Widerstand wird über eine M1C-Schaltung gespeist. Die Strangspannung beträgt 230V. Welche Gleichspannung stellt sich bei einem Steuerwinkel von 90° ein? 3.3 X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-13 Zweipuls-Brückenschaltung B2 Die Zweipuls-Brückenschaltung nutzt beide Wechselstromhalbwellen aus. Die Brückenschaltung besteht in der ungesteuerten Ausführung aus vier zu einer Brücke geschalteten Dioden. Sie ist die am häufigsten verwendete Gleichrichterschaltung und kann für Verbraucherleistungen bis in den kW-Bereich eingesetzt werden. a) B2U mit ohmscher Last uS, ud 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° ωt id ωt X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-14 Damit ein Strom durch den Widerstand fließen kann, müssen in jeder Halbwelle zwei Dioden leitend sein. In der positiven Halbwelle der Strangspannung uS sind das die Dioden V2, V3, während in der negativen Halbwelle V1 und V4 im leitenden Zustand sind. Der Gleichstrom fließt nichtlückend während einer Periode in zwei Stromblöcken (Zweipuls) von je 180°. Die einzelnen Ventile werden deswegen jeweils mit nur der Hälfte des Gleichstroms belastet. KENNWERTE DER B2U Stromflusswinkel Der Winkelbereich, während dem ein Ventil leitend ist, wird als Stromflusswinkel Θ bezeichnet. Θ = 180° Arithmetischer Mittelwert Die arithmetischen Mittelwerte von Ausgangsspannung und Ausgangsstrom sind doppelt so groß wie bei der E1U-Schaltung. U d = 0, 9 ⋅U S Id = Ud RL Bei einer Strangspannung US = 230V berechnet sich der arithmetische Mittelwert somit zu Ud = 207V. Effektivwert Der Effektivwert der Ausgangsspannung ist so groß wie die Strangspannung US (Ventilspannungen vernachlässigt). U deff = U S I deff = U deff RL Formfaktor F= X2EE, TECEN U deff Ud = 1,11 X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-15 b) B2C mit ohmscher Last Beispiel: α = 60° uS ωt 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° Udα, idα ωt iG ωt X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-16 Damit ein Gleichstrom fließen kann, müssen immer zwei Ventile gezündet werden. Das Steuergerät muss zwei um 180° verschobene Impulspaare erzeugen. Mit wachsendem Steuerwinkel werden Mittelwert und Effektivwert der Gleichspannung kleiner. Man erkennt, dass bei α = 180° der arithmetische Mittelwert der Gleichspannung Null wird. Der maximale Steuerwinkel beträgt deshalb: αmax = 180°. Für α > 0° werden die Stromflusswinkel kleiner und es entstehen Stromlücken entsprechend dem Steuerwinkel α. Der arithmetische Mittelwert der Ausgangsspannung kann mit folgender Formel berechnet werden: U dα = U d 0 ⋅ 1 + cos α 2 mit U d 0 = 0, 9 ⋅U S Übung: Ein ohmscher Widerstand wird über eine B2C an eine Wechselspannung US = 400V gelegt. Der Steuerwinkel beträgt α = ___________ . Zeichne in ein Diagramm die qualitativen Verläufe über von udα und idα. Berechne außerdem den arithmetischen Mittelwert der Ausgangsspannung. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-17 c) B2C mit induktiver Belastung Bei rein induktiver Last kann bis zu einem Steuerwinkel α = 90° kann ein ideal geglätteter Strom mit gleichbleibender Größe angenommen werden. Beispiel: α = 30° udα ωt 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° idα ωt X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-18 Für α > 0° entstehen negative Spannungs-Zeit-Flächen, die bei α = 90° genau so groß sind wie die positiven. Der Mittelwert der Gleichspannung ist dann Null. In den Ventilen fließen für Steuerwinkel α = 0° bis α = 90° idealisiert rechteckförmige Ströme mit dem Stromflusswinkel Θ = 180°. Die Ausgangsspannung kann für Steuerwinkel α ≤ 90° mit folgender Formel berechnet werden: U dα = U d 0 ⋅ cos α Bei größeren Steuerwinkeln beginnt der Strom zu lücken. Die positiven und negativen SpannungsZeit-Flächen sind jeweils gleich groß, der arithmetische Mittelwert der Ausgangsspannung bleibt Null. Merke: B2C mit induktiver Last: Für α > 90° ⇒ Udα = 0 Übung Zeichne für eine B2C mit rein induktiver Last den Verlauf von udα und idα bei einem Steuerwinkel α = 120°. udα ωt 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° idα ωt X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-19 d) B2C mit gemischt ohmsch-induktiver Last Bei gemischt ohmsch-induktiver Last hält die Induktivität den Stromfluss nach dem Nulldurchgang der Spannung nur solange, bis sie ihre gespeicherte Energie wieder an das speisende Netz abgegeben hat. Die negative Spannungs-Zeitfläche wird verkürzt und es treten Stromlücken auf. Beispiel: α = 90° udα ωt 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° idα ωt Merke: Ist der Induktivitätswert L groß gegenüber dem ohmschen Widerstandswert R, dann verschwinden die Stromlücken und der Laststrom nähert sich dem ideal geglätteten Stromverlauf bei induktiver Last. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-20 Steuerkennlinie Das folgende Bild zeigt die Steuerkennlinie einer B2C für ohmsche und induktive Last. Übung Bestimme mit Hilfe der Steuerkennlinie die Ausgangsspannung einer B2C für folgende Fälle: a) ohmsche Belastung bei α = 105° b) induktive Belastung bei α = 75° 3.4 X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-21 Dreipuls-Mittelpunktschaltung M3 Für höhere Leistungen, z. B. Drehzahlsteuerung von Motoren, werden gesteuerte Drehstromgleichrichter eingesetzt. Dabei werden je nach Anforderung an Amplitude und Welligkeit des Gleichstromes sowohl die gesteuerte Dreipuls-Mittelpunktschaltung M3C als auch die vollgesteuerte Sechspuls-Brückenschaltung B6C eingesetzt. Hier soll zuerst die M3-Schaltung behandelt werden. a) M3U mit ohmscher Last Es leitet jeweils die Diode mit dem höchsten positiven Anodenpotential. Die leitende Diode schaltet dieses Potential auf die Kathoden der beiden anderen Ventile, sodass diese sperren. Die Kommutierung (Stromübergabe) auf das folgende Ventil erfolgt im natürlichen Phasenanschnittpunkt, in dem die Strangspannung des nächsten Strangs größer zu werden beginnt als die vorherige. Dieser natürliche Zündzeitpunkt liegt bei der M3-Schaltung immer 30° nach dem positiven Nulldurchgang der drei Strangspannungen. Der Gleichstrom fließt nichtlückend während einer Periode in drei Stromblöcken (Dreipuls) von je 120°. Die einzelnen Ventile werden deswegen jeweils mit nur 1/3 des Gleichstroms belastet. Merke: Der Winkelbereich, während dem ein Ventil leitet wird als Stromflusswinkel Θ bezeichnet. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-22 uS ωt 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° ud ωt id ωt X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-23 KENNWERTE DER M3U Stromflusswinkel Der Winkelbereich, während dem ein Ventil leitend ist, wird als Stromflusswinkel Θ bezeichnet. Θ = 120° Arithmetischer Mittelwert Die arithmetischen Mittelwerte von Ausgangsspannung und Ausgangsstrom können mit folgenden Formeln berechnet werden. U d = 1,17 ⋅U S Id = Ud RL Bei einer Strangspannung US = 230V berechnet sich der arithmetische Mittelwert somit zu Ud = 269V. Effektivwert U deff = 1,189 ⋅U S I deff = U deff RL Formfaktor F= U deff Ud = 1, 016 b) M3C mit ohmscher Last X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-24 Beispiel: α = 30° Die Zündung der einzelnen Ventile erfolgt 30° nach dem natürlichen Kommutierungspunkt. Merke: Bei Dreiphasen-Gleichrichterschaltungen wird der Steuerwinkel α vom natürlichen Zündzeitpunkt (Kommutierungspunkt) aus gezählt. udα ωt 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° idα ωt iG ωt Mit wachsendem Steuerwinkel werden Mittelwert und Effektivwert der Gleichspannung kleiner. Man erkennt, dass bei α = 150° der arithmetische Mittelwert der Gleichspannung Null wird. Der maximale Steuerwinkel bei ohmscher Last beträgt deshalb: αmax = 150° Bis α = 30° ist der Gleichstrom nichtlückend. Für Steuerwinkel α > 30° werden die Stromflusswinkel der Ventile geringer und es entstehen Stromlücken des Laststromes. Diese werden mit zunehmendem Steuerwinkel immer größer. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen X2EE, TECEN 3-25 X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-26 Übung Zeichne für eine M3C bei rein ohmscher Last das Liniendiagramm von udα und idα bei einem Steuerwinkel α = ___________ . udα ωt 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° idα ωt iG ωt X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-27 c) M3C mit induktiver Last Bei rein induktiver Last kann wie bei der B2-Schaltung für Steuerwinkel bis α = 90° ein ideal geglätteter Laststrom mit gleich bleibender Größe angenommen werden. Beispiel: α = 30° udα ωt 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° idα ωt iG ωt X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-28 Beispiel: α = 90° udα ωt 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° idα ωt iG ωt Mit wachsendem Steuerwinkel wird der Mittelwert der Gleichspannung kleiner. Für α > 30° entstehen negative Spannungs-Zeit-Flächen, die bei α = 90° so groß sind wie die positiven. Der Mittelwert der Gleichspannung ist dann Null. In den Ventilen fließen für Steuerwinkel α = 0° bis α = 90° idealisiert rechteckförmige Ströme mit dem Stromflusswinkel Θ = 120°. Die Ausgangsspannung kann für Steuerwinkel α ≤ 90° mit folgender Formel berechnet werden: U dα = U d 0 ⋅ cos α M3C mit induktiver Last: Für α > 90° ⇒ Udα = 0 X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-29 Übung Zeichne für eine M3C bei rein induktiver Last das Liniendiagramm von udα und idα bei einem Steuerwinkel α = ___________ . Wie groß ist der Mittelwert der Ausgangsspannung? udα ωt 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° idα ωt iG ωt X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-30 d) M3C mit gemischt ohmsch-induktiver Last Bei gemischt ohmsch-induktiver Last hält die Induktivität den Stromfluss nach dem Nulldurchgang der Spannung nur solange aufrecht, bis sie ihre gespeicherte Energie wieder an das speisende Netz abgegeben hat. Die negative Spannungs-Zeitfläche wird verkürzt und es treten Stromlücken auf. udα ωt 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° idα ωt Merke: Ist der Induktivitätswert L groß gegenüber dem ohmschen Widerstandswert R, dann verschwinden die Stromlücken und der Laststrom nähert sich dem ideal geglätteten Stromverlauf bei induktiver Last. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-31 Steuerkennlinie Übung Ein ohmscher Widerstand R = 150Ω liegt über eine M3C an einer Dreiphasenwechselspannung mit US = 400V. Bestimme mit Hilfe der Steuerkennlinie die Ausgangsspannung Udα und den Strom Idα für einen Steuerwinkel von 60°. 3.5 X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-32 Sechspuls-Brückenschaltung B6 Sie ist die am weitesten verbreitete Stromrichterschaltung für das Dreiphasenwechselstromsystem. Für zu versorgende Leistungen ab etwa 10kW wird sie als Standardschaltung eingesetzt. Der wesntliche Vorteil der B6-Schaltung als Gleichrichter liegt in der qualitativ guten Gleichspannung. a) B6U mit Ohmscher Last Bei der ungesteuerten Sechspuls-Brückenschaltung B6U werden für jede Außenleiterspannung zwei Dioden eingesetzt. Um einen Stromfluss zu ermöglichen, muss je eine Diode aus der oberen und eine Diode aus der unteren Brückenhälfte gleichzeitig leitend sein. Die Ausgangsspannung ergibt sich aus dem Spannungsunterschied zwischen den jeweils über zwei Dioden zur Last durchgeschalteten Außenleiter. Dabei leiten jeweils die Dioden mit dem höchsten Anodenpotential beziehungsweise mit dem tiefsten Kathodenpotential. Zeigerdiagramm der Strang- und Leiterspannungen X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-33 uS ωt 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° höchstes Potential tiefstes Potential leitende Dioden ud ωt Der Gleichstrom fließt nichtlückend während einer Periode in sechs Stromblöcken (Sechspuls) von je 60°. Da die einzelnen Ventile jeweils zwei Stromblöcke durchlassen, beträgt der Stromflusswinkel 120°. Die Ventile werden deswegen jeweils mit nur 1/3 des Gleichstroms belastet. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-34 KENNWERTE DER B6U Stromflusswinkel Der Winkelbereich, während dem ein Ventil leitend ist, wird als Stromflusswinkel Θ bezeichnet. Θ = 120° Arithmetischer Mittelwert Die arithmetischen Mittelwerte von Ausgangsspannung und Ausgangsstrom können mit folgenden Formeln berechnet werden. U d = 2, 34 ⋅U S Id = bzw. U d = 1, 35 ⋅U L Ud RL Bei einer Strangspannung US = 230V berechnet sich der arithmetische Mittelwert somit zu Ud = 538V. Effektivwert U deff = 2, 34 ⋅U S I deff = U deff RL Formfaktor F= U deff Ud =1 b) B6C mit ohmscher Last X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-35 Beispiel: α = 60° Die Zündung der einzelnen Ventile erfolgt 60° nach dem natürlichen Kommutierungspunkt. uS ωt 90° 180° 270° 360° 450° 540° 90° 180° 270° 360° 450° 540° udα ωt iG ωt iG ωt X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-36 Mit wachsendem Steuerwinkel werden Mittelwert und Effektivwert der Gleichspannung kleiner. Man erkennt, dass bei α = 120° der arithmetische Mittelwert der Gleichspannung Null wird. Der maximale Steuerwinkel bei ohmscher Last beträgt deshalb: αmax = 120° Für α > 60° werden die Stromflusswinkel kleiner und es entstehen Stromlücken entsprechend dem Steuerwinkel α. Soll zum Beispiel bei einem Steuerwinkel α = 60° eingeschaltet werden, sind gleichzeitig zwei Zündimpulse erforderlich (V1 und V6'). Das Steuergerät muss deshalb für jedes Ventil Doppelimpulse mit dem Abstand 60° erzeugen. Beispiel: α = 90° Die Zündung der einzelnen Ventile erfolgt 90° nach dem natürlichen Kommutierungspunkt. udα ωt 90° 180° 270° 360° 450° 540° c) B6C mit induktiver Last Bei rein induktiver Last kann für Steuerwinkel bis α = 90° ein ideal geglätteter Laststrom mit gleich bleibender Größe angenommen werden. Mit wachsendem Steuerwinkel wird der Mittelwert der Gleichspannung kleiner. Für α > 30° entstehen negative Spannungs-Zeit-Flächen, die bei α = 90° so groß sind wie die positiven. Der Mittelwert der Gleichspannung ist dann Null. In den Ventilen fließen für Steuerwinkel α = 0° bis α = 90° idealisiert rechteckförmige Ströme mit dem Stromflusswinkel Θ = 120°. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-37 Die Ausgangsspannung kann für Steuerwinkel α ≤ 90° mit folgender Formel berechnet werden: U dα = U d 0 ⋅ cos α B6C mit induktiver Last: Für α > 90° ⇒ Udα = 0 Steuerkennlinie Übung Der Anker eines 400V-Gleichstrommotors (als induktive Belastung zu betrachten) wird über eine B6C an das Drehstromnetz 400V/230V angeschlossen. Bestimme den einzustellenden Steuerwinkel, damit der Motor mit seiner Bemessungsspannung betrieben wird. 3.6 X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-38 Energierückspeisung bei Gleichrichterschaltungen Die bisher behandelte Arbeitsweise von Stromrichtern wird als Gleichrichterbetrieb bezeichnet. Wechsel- oder Drehstrom wird in Gleichstrom umgeformt. Das Wechselstromnetz liefert Leistung in das Gleichstromnetz. Der Gleichrichter kann dabei gesteuert oder ungesteuert sein. Ein gesteuerter Gleichrichter kann Energie aus einem vorhandenen Gleichstromnetz in das Wechselstromnetz zurückspeisen. Diese Arbeitsweise wird als Wechselrichterbetrieb bezeichnet. Das vorhandene Gleichstromnetz kann zum Beispiel ein angetriebener Gleichstrommotor (= Gleichstromgenerator) sein. Gleichrichter Wechselrichter Der Zündwinkel muss sich im Wechselrichterbetrieb in einem definierten Winkelbereich befinden. Die Energiequelle befindet sich auf der Gleichstromseite. Da die elektrische Leistung gleich U•I ist, der Strom aber wegen der elektrischen Ventile des Stromrichters seine Richtung nicht umkehren kann, muss bei dieser Betriebsart die Gleichspannung ihre Polarität gegenüber jener im Gleichrichterbetrieb ändern. Damit wird die Leistung negativ, was eine Umkehr der Energierichtung bedeutet. Man unterscheidet: a) Netzgeführte Wechselrichter Die Wechselrichter arbeiten auf ein bereits vorhandenes Wechselstromnetz. b) Selbstgeführte Wechselrichter Die Wechselrichter erzeugen ein eigenes Wechselstromnetz. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-39 Beispiel: Gleichstrommaschine an einer B2C-Schaltung 1) Gleichrichterbetrieb: Gleichstrommaschine im Motorbetrieb Hinweis: Wird der Motor über eine genügend große Glättungsinduktivität an die B2C angeschlossen, dann verhält sich der Motor wegen des geglätteten, nichtlückenden Stroms wie eine ideale Induktivität. Die Steuerkennlinie entspricht dann der Kennlinie für induktive Last. Die Ausgangsspannung kann in diesem Fall mit der folgenden Formel berechnet werden: U dα = U d 0 ⋅ cos α Gleichrichterbetrieb: Gleichstrommotor mit vollgesteuerter Zweipuls-Brückenschaltung a) Schaltplan b) Systemgrößen für α = 60° c) Leistungsfluss Mit steigendem Steuerwinkel α nimmt der arithmetische Mittelwert der Gleichspannung bis auf Null ab, weil die negativen Zeitflächen immer größer werden. Bei α = 90° ergeben sich gleiche positive und negative Zeitflächen. Udα ist dann Null und der Motor bleibt stehen. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-40 2) Wechselrichterbetrieb: Gleichstrommaschine im Generatorbetrieb Lässt man die Gleichstrommaschine im Senkbetrieb arbeiten, dann wird sie angetrieben und sie arbeitet als Generator. Die Ankerspannung Udα wird jetzt vom Generator geliefert. Da die Drehrichtung sich gegenüber dem Motorbetrieb umdreht, muss auch die Polarität von Udα ändern. Wechselrichterbetrieb: Gleichstromgenerator mit vollgesteuerter Zweipuls-Brückenschaltung a) Schaltplan b) Systemgrößen für α = 120° c) Leistungsfluss Damit die Gleichstrommaschine im Wechselrichterbetrieb arbeiten kann, müssen Steuerwinkel α > 90° eingestellt werden. Man erkennt, dass die negativen Zeitflächen dann größer als die positiven Zeitflächen werden und Udα negativ wird (umgedrehte Polarität wie im Gleichrichterbetrieb). Aus der Steuerkennlinie erkennt man, dass im Wechselrichterbetrieb (= Generatorbetrieb = aktive Last) Winkel bis 180° eingestellt werden können. Der Generator liefert dann die maximale Gleichspannung. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-41 3.7 Betriebsarten der Gleichstrommaschine Die unterschiedliche Klassifizierung der Betriebsarten beruht u.a. darauf, dass der Gleichstrommotor die als Last wirkende Arbeitsmaschine nicht nur antreibt, sondern zeitweise von ihr auch mechanische Energie aufnehmen kann. Falls die im Motor induzierte Spannung größer als die angelegte Klemmenspannung wird, liegt Generatorbetrieb und damit Energieflussumkehr vor. Da zusätzlich noch Rechts- und Linkslauf für beide Betriebsarten möglich sind, hat man allgemein für die Gleichstrommaschine mit konstanter Erregung folgende Betriebszustände definiert: I Motorbetrieb Rechtslauf Elektr. Leistungsaufnahme +P = U·I II Generatorbetrieb Rechtslauf Elektr. Leistungsabgabe -P = U·(-I) III Motorbetrieb Linkslauf Elektr. Leistungsaufnahme +P = (-U)·(-I) IV Generatorbetrieb Linkslauf Elektr. Leistungsabgabe -P = (-U)·I Die einzelnen Betriebszustände werden in einem Vierquadrantenfeld dargestellt. UKL II Generatorbetrieb Rechtslauf G Motorbetrieb Rechtslauf I M IA M III Motorbetrieb Linkslauf G Generatorbetrieb Linkslauf IV UKL: Klemmenspannung IA : Ankerstrom Bei positiver Spannung liegt Rechtslauf und bei negativer Spannung Linkslauf vor. Ebenso entspricht die Leistungsaufnahme (positive Leistung) dem Motor- und die Leistungsabgabe X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-42 (negative Leistung) dem Generatorbetrieb. Für den Gleichstrommotor mit konstanter Erregung gelten die Beziehungen: M ~ IA und n ~ U0 Daher kann das I−U−Diagramm auch als M−n−Diagramm abgebildet werden. In der praktischen Antriebstechnik hat sich die n = f(M)-Darstellung als Vierquadrantendiagramm mit folgenden Festlegungen durchgesetzt. I. Quadrant treiben Rechtslauf mech. Leistungsabgabe +P = M·ω II. Quadrant bremsen Rechtslauf mech. Leistungsaufnahme -P = (-M)·ω ΙΙΙ. Quadrant treiben Linkslauf mech. Leistungsabgabe +P = (-M)·(-ω) IV. Quadrant bremsen Linkslauf mech. Leistungsaufnahme -P = M·(-ω) n II I BREMSEN TREIBEN Generator- bzw. Wechselrichterbetrieb Motor- bzw. Gleichrichterbetrieb M TREIBEN BREMSEN Motor- bzw. Gleichrichterbetrieb Generator- bzw. Wechselrichterbetrieb III IV Setzt man netzgeführte Stromrichter voraus, die gleichstromseitig mit dem Anker der Gleichstrommaschine verbunden sind, kann man dem Vierquadrantendiagramm auch die jeweiligen Betriebsarten der entsprechenden Stromrichterschaltungen zuordnen. Es wurde gezeigt, dass eine vollgesteuerte B2C-Schaltung trotz gleichbleibender Stromrichtung eine Gleichspannung abgeben kann, deren arithmetischer Mittelwert sowohl positive als auch negative Werte annehmen kann. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc Gleichrichterschaltungen 3-43 Diese Zweiquadrantenschaltungen werden in ihrer Gleichrichter-Betriebsform den Motor- bzw. Antriebsquadranten zugeordnet, während die Wechselrichterbetriebsart den Generator- bzw. Bremsquadranten entspricht. X2EE, TECEN X2EE_GR_Schaltungen_stud.doc