Beispielaufgabe
Werbung

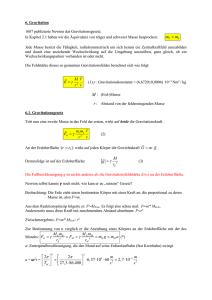
Hinweise zur Lösung von Übungsaufgaben zur „Dynamik des Starren Körpers“ Gegenstand der Dynamik des Starren Körpers (SK) ist die Wirkung von Kräften und Drehmomenten, die am Körper angreifen, insbesondere im Hinblick auf die Änderung des Bewegungszustandes (Rotationsbewegung). Die Trägheit des SK, die einer Änderung des Bewegungszustandes (Rotation) entgegen steht, findet ihren Ausdruck im Massenträgheitsmoment (MTM) 1. Regeln zur Bestimmung des Massenträgheitsmoments: • Das MTM hängt von der Position (Abstand zum Schwerpunkt) und der Orientierung der Rotationsachse bezüglich des SK ab (Skizze!). • Ist r⊥ der Abstand eines Massenelements dm des SK zur betrachteten Rotationsachse, berechnet sich das MTM nach J = ∫ r⊥2 dm . Analog gilt für ein Punktmassensystem J = ∑ ri 2⊥ ⋅ mi . • • • Diese Formeln gelten für jede beliebige Position und Ausrichtung der Rotationsachse. Ist das MTM JS für eine Rotationsachse durch den Schwerpunkt bekannt, lässt sich das MTM für eine dazu im Abstand s parallel verlaufende Achse mit Hilfe des Satzes von Steiner berechnen: J = J S + m ⋅ s 2 , m ist die Gesamtmasse des SK. MTM sind additiv. Sind also die MTM Ji von Teilkörpern des SK bezüglich der aktuellen Achse bekannt, ist das MTM des gesamten SK gleich der Summe J = ∑ J i . 2. Tipps und Tricks • Das Koordinatensystem lege man zweckmäßig in den SP des SK, die z-Achse in Richtung der Rotationsachse. • Ist der SK symmetrisch, ist es meist günstig, das Koordinatensystem der Symmetrie anzupassen, bei rechtwinkligen Körpern also kartesische Koordinaten, bei Rotationssymmetrie Zylinder- oder Kugelkoordinaten. • Die Massenelemente (ME) müssen stets so ausgewählt werden, dass sie aus Teilchen bestehen, die alle den gleichen Abstand von der Rotationsachse aufweisen, genauer ausgedrückt, einen solchen im Intervall r... (r+dr). • Die ME sind demzufolge nicht zwangsläufig in 3 Dimensionen infinitesimal klein. Man kann einen SK in solche ME aufteilen, die dünnen Stäbchen der Länge l ähneln mit jeweils kleinen Querschnittsflächen dA, die parallel zur Rotationsachse liegen. Jedes ME trägt dann zum MTM bei: dJ = r⊥2 dm = r⊥2 ρ l dA mit der Dichte ρ. Bei Rotationskörpern kann man als ME dünnwandige, zur Rotationsachse konzentrische Hohlzylinder der Wandstärke dr und der Länge l betrachten. Jedes dieser ME liefert seinen Beitrag zum MTM: dJ = ρ 2π l r 3 dr . • Eine elegante Methode zur Berechnung des MTM von Rotationskörpern der Art „Schachfigur“, wenn die Einhüllende r(z) gegeben ist und die Dichte konstant ist: Der Körper wird in dünne Zylinderscheiben der Dicke dz mit dem Radius r(z) aufgeteilt. Jede dieser Scheiben trägt mit dJ = dm 2 ρ r ( z ) = π r 4 ( z ) dz zum MTM bei, folglich 2 2 J =π ρ 2 z2 ∫r 4 ( z ) dz . (1) z1 3. Illustration am Beispiel der Berechnung des MTM einer Hohlkugel Aufgabe: Berechnen Sie das Massenträgheitsmoment einer dünnwandigen Hohlkugel mit der Masse m und dem Radius R bezüglich der Rotation um den Schwerpunkt. Lösung: Es gibt wieder mehrere Methoden zur Auswahl. Auf der Abbildung hervorgehoben sind Teilchen auf der Kugelfläche vom Radius R, deren Winkel zur z-Achse zwischen θ und θ +dθ liegt. Diese bilden einen dünnwandigen etwas schiefen Reifen (ähnlich einem Fassreifen). Mit seiner Masse dm stellt der Reifen ein „gutes“ ME dar, da alle Atome, aus denen er besteht, jeweils den gleichen Abstand x(z) zur Rotationsachse haben. m m gilt die Beziehung Mit einer auf die Fläche bezogenen Dichte σ = = A 4π R 2 dm = σ ⋅ dA = σ ⋅ R dθ ⋅ 2π R sin θ . Multipliziert mit dem Quadrat des Abstands zur Rotationsachse x = R sinθ und integriert über die gesamte Hohlkugel erhält man π J HK = ∫ x 2 dm = σ ⋅ 2π R 4 ∫ sin 3 θ dθ . Um dieses Integral zu lösen, nutzt man zunächst die Beziehung 0 sin2 θ = 1-cos2 θ und substituiert t = cos θ, woraus folgt dt = -sinθ dθ. π Demnach gilt π cos3 θ π 4 t 3 t" ∫0 sin θ dθ = ∫0 (1 − cos θ ) sin θ dθ = − ∫t ' (1 − t )dt = −t + 3 t ' = − cosθ + 3 0 = 3 . t '' 3 2 2 Für die Hohlkugel erhält man mit diesem Ergebnis und nach Einsetzen von σ das MTM 2 J HK = m R 2 . 3 Eine andere Möglichkeit geht wie folgt: Man berechnet zunächst das MTM einer Vollkugel vom Radius R1 = R und der Masse mK1. Davon subtrahiert man das MTM einer zur ersten konzentrisch angeordneten geringfügig kleineren Kugel vom Radius R2 und der Masse mK2, wobei gilt R1 R2 = d <<R1 und mK1- mK2 = m. Zur Übung werden im folgenden mehrere Methoden angewandt. 1. Methode: Zur Berechnung des MTM einer Vollkugel konstanter Dichte ρ ist die Anwendung der Beziehung (1) vorteilhaft, da die Kontur durch die Kreisgleichung beschrieben wird. Mit x( z ) = R 2 − z 2 erhält man für die Vollkugel J K ρ h = π ∫ (R 2 2 −z ) dz = 2 2 0 ρ π R 4 z − 2 2R 2 z 3 z 5 + R ρ 16 + = π ⋅ R5 . 3 5 −R 2 15 2 mK mK = ergibt sich daraus J K = m K R 2 . 4π 3 VK 5 R 3 2 2 4π 5 Das MTM einer Hohlkugel ist J HK = mK 1 R12 − mK 2 R22 = ρ R1 − R25 . Die Masse der Hohl5 5 3 4π kugel lässt sich ausdrücken durch m = mK 1 − mK 2 = ρ R13 − R23 , für das MTM der (dickwandigen) 3 5 5 2 R − R2 . Da die Hohlkugel aber sehr dünnwandig sein soll, mit Hohlkugel erhält man J HK = m 13 5 R1 − R23 Mit ρ = ( ) ( R2=R1-d, gilt näherungsweise R2n ≅ R1n − n R1n−1d + ... ( ) ) und damit folgt bei Vernachlässigung von Gliedern höherer Ordnung für die dünnwandige Hohlkugel J HK = 2 5 R14 d 2 m = m R 2 , s.o. 2 5 3R1 d 3 2. Methode: Das MTM von Vollkugel und Hohlkugel soll mit Hilfe von Kugelkoordinaten berechnet werden. Das Massenelement in Kugelkoordinaten lautet dm = ρ dV = ρ dr ⋅ rdθ ⋅ r sin θ dϕ = ρ r 2 dr dϕ sin θ dθ , s. Abbildung. Die Rotation erfolgt um die z-Achse. Der Beitrag von dm zum MTM ist dJ = r 2 sin 2 θ dm . Integriert wird über das Volumen der Schale der Hohlkugel, also in den Intervallen 0 ≤ ϕ ≤ 2π ; R1 ≤ r ≤ R2 ; 0 ≤ θ ≤ π . Daraus folgt 2π π R2 R25 − R15 π 3 ∫ sin θ dθ . Das InJ HK = ρ ∫ ∫ ∫ r dr dϕ sin θ dθ = ρ 2π 5 0 0 0 R1 tegral über θ wurde oben schon berechnet, also folgt wieder 2 4π 5 J HK = ρ R1 − R25 , s.o. 5 3 4 ( 3 ) Für R2=0 und R1=R erhält man den Ausdruck für die Vollkugel J K = ρ 8π 5 2 R1 − R25 = mK R 2 , s.o. 15 5 ( ) 4. Zur Bearbeitung dynamischer Aufgaben Zunächst sollte man immer überprüfen, ob Erhaltungssätze gelten. Auch bei rotierenden SK bzw. PMS können Energieerhaltungssatz (EES), Impulserhaltungssatz (IES) und auch Drehimpulserhaltungssatz (DIES) gelten, je nach Problematik alle gemeinsam oder nur einzeln. Zusammengefasst: • Tritt keine Reibung auf und keine Energie wird durch plastische Verformung, unelastischen Stoß,... aus dem Reservoir von Potentieller und Kinetischer Energie entnommen, gilt der EES. • Wirken keine äußeren Kräfte bzw. ist deren Vektorsumme gleich Null, also ∑ Fi = 0 , so gilt der IES. • Ist die Summe aller Drehmomente, die aus den am SK angreifenden äußeren Kräfte resultieren gleich Null, also ∑ M i = ∑ Ri × Fi = 0 , so gilt der DIES . • • • Da IES und DIES Vektorcharakter haben, können als Erhaltungsgrößen auch nur einzelne Komponenten von Gesamtimpuls bzw. Gesamtdrehimpuls auftreten. Eine fest im Untergrund verankerte (reibungsfreie) Achse bewirkt beispielsweise, dass nur der Drehimpuls in Achsenrichtung als Erhaltungsgröße zu betrachten ist. Gelten keine Erhaltungssätze, kann der Vorgang durch die Bewegungsgleichungen beschrieben werden. Es sind dies die Grundgesetze der Mechanik für die Translation sowie die Rotation. Für jeden SK des Systems sind beide Vektorgleichungen zu formulieren und das Gleichungssystem aufzulösen. Bei den folgenden beiden Aufgaben handelt es sich stets zunächst darum abzuklären, ob und welche Erhaltungssätze gelten. Die Erhaltungssätze folgen aus den Bewegungsgleichungen unter bestimmten Voraussetzungen, sind also Sonderfälle (sie werden auch als Integrale der Bewegung bezeichnet). Ist der Sonderfall nicht gegeben, muss mit den Bewegungsgleichungen gearbeitet werden. 5. Beispielaufgaben zur Illustration 1. Anwendung von Energiesatz und Drehimpulserhaltung Eine Masse m gleitet mit der Anfangsgeschwindigkeit v1 reibungsfrei auf einer horizontalen Unterlage. Hierbei wird sie durch ein masseloses Seil auf eine Kreisbahn gezwungen. Das Seil hat zunächst die Länge R1. Die Länge des Seiles wird auf zwei verschiedene Arten auf die Länge R2 verkürzt. Im Fall a) wird es durch eine genau im Kreiszentrum liegende dünne Bohrung gezogen, im Fall b) wickelt es sich selbständig um einen im Kreiszentrum senkrecht angebrachten Stab vom Radius r und verkürzt sich dadurch ständig. Bestimmen Sie die Umfangsgeschwindigkeiten v2a sowie v2b (jeweils nach Erreichen von R2). Lösung: Es wird zunächst untersucht, welche Erhaltungssätze hier gelten. Bei a) wird das Seil durch eine zentral angeordnete Bohrung gezogen. Dabei wird mit der Seilkraft Arbeit gegen die Trägheitskraft (Zentrifugalkraft) verrichtet, Energie wird von außerhalb des Systems (welches hier nur aus der Masse m besteht) zugeführt. Somit ist der EES nicht anwendbar. Das Vorhandensein der Seilkraft bewirkt, dass in beiden Fällen der IES nicht gilt. Das erkennt man auch aus dem Umstand, dass der Schwerpunkt sich auf einer gekrümmten Bahn bewegt, also keine gleichförmige Bewegung vollführt. Wählt man ein Bezugssystem so, dass sein Ursprung in der Bohrung liegt, mit der z-Achse als Rotationsachse, sind der Ortsvektor zur Masse R und die an m angreifende Seilkraft FS zueinander antiparallel. Das durch die Seilkraft auf m ausgeübte Drehmoment M = R × FS ist somit stets gleich Null und der DIES gilt. J1 ω1 = J 2ω2 . Da m als Punktmasse aufgefasst werden kann, gilt J = m R 2 . Mit ω z = m R12 v folgt R v1a v R = m R22 2 a und somit v2 a = 1 v1a . R1 R2 R2 Im Fall b) wird das Seil zwar auch kürzer und zieht dadurch die Masse m an den Stab. Dieser steht allerdings fixiert und über ihn kann deshalb keine Arbeit an m geleistet werden. Somit gilt hier der EES. Da keine potentielle Energie zu berücksichtigen ist, folgt sofort v2 a = v1a . Der Ortsvektor R und die an m angreifende Seilkraft FS sind bei b) nicht antiparallel, weil die Seilkraft von der Tangente des Stabes ausgeübt wird und nicht vom Koordinatenursprung (die Seilkraft ist hier keine Zentralkraft). Hiermit wird ein Drehmoment erzeugt und der DIES kann nicht angewendet werden. Wenn an m trotz beschleunigter Bewegung (gekrümmte Trajektorie) keine Arbeit verrichtet wird, muss die Seilkraft als Zwangskraft senkrecht zur Bahnkurve von m orientiert sein (Zwangskräfte leisten nie Arbeit sondern ändern nur die Bewegungsrichtung). Der Winkel zwischen r FS und R hat den Wert (im Bogenmaß). Bei jeder vollen Umdrehung legt m eine Strecke von R 2π R zurück und nähert sich dabei dem Zentrum der spiralförmigen Bahn um 2π r . Gegenüber eir ner Kreisbahn hat diese ebenfalls einen Winkel von . Somit greift im Unterschied zu a) die SeilR kraft in b) wirklich senkrecht zur Trajektorie an, ist also Zwangskraft und verrichtet keine Arbeit. 2. Kraftstoß und Momentenstoß Ein Tennisball mit dem Radius R und der Masse m trifft mit der Geschwindigkeit v unter dem Winkel α (gegen die Horizontale) auf den Boden auf und prallt unter dem Winkel β und mit der Geschwindigkeit v' wieder ab. Der Spieler hatte dem Ball beim Abschlag noch einen zusätzlichen Drall verliehen (angeschnittener Ball), so dass dieser zusätzlich noch um eine horizontale und zur Flugbahn senkrechte Achse mit der Winkelgeschwindigkeit ω rotiert. Bestimmen Sie β und v' bei gegebenen Werten von a und v. Lösung: Eine Skizze ist hier wieder besonders notwendig. Beim Auftreffen auf dem Boden wirkt Reibungskraft, und zwar solange, bis sich die Umfangsgeschwindigkeit des Balles seiner Translationsgeschwindigkeit (vx in x-Richtung) genau angeglichen hat. Der (vorerst unbekannte) Kraftstoß ∫ FRx dt infolge Reibung verändert sowohl Impuls als auch Drehimpuls und kann durch Anwendung der Grundgleichungen der Mechanik für die Translations- und Rotationsbewegung eliminiert werden. Der Tennisball möge ideal elastisch sein, also erfolgt der Aufprall bezüglich der Vertikalkomponente der Geschwindigkeit wie beim elastischen Stoß gegen eine unendlich große Masse (Untergrund): v′y = −v y . Bezüglich der x-Richtung gilt keine Impulserhaltung. Es müssen die Bewegungsgleichungen für Translation und Rotation aufgestellt werden. dp dv Die Bewegungsgleichung der Translation enthält die Reibungskraft: FRx = x = m x . dt dt Die Impulsänderung durch den Stoß lautet: ∫ FRx dt = m(v′x − vx ) . dω z = R ⋅ FRx , dt für die Änderung des Drehimpulses: R ∫ FRx dt = J (ω z′ − ω z ) . Für die Rotation gilt M z = J v′x folgt aus beiden Bewegungsgleichungen R v′ J − x − ω z = R m (v′x − v x ) und weiter R J (v′x + Rω z ) = R 2 m (vx − v′x ) Mit ω ′z = − v′x ( J + m R 2 ) = R 2 m vx − R J ω R 2 m vx − R J ωz . J + m R2 Da ein Tennisball gut als eine dünnwandige Kugelschale betrachtet werden kann, verwenden wir das 2 weiter oben bereits berechnete Massenträgheitsmoment für die Kugelschale J = m R 2 3 2 2m R R 2 m vx − R ωz 5v y 3 2 3 v′x = = vx − R ω z , folglich β = arctan 2 2m R 5 5 2 R ω z − 3v x + m R2 3 v′x = Wegen v′y = −v y gilt außerdem die nützliche Beziehung tan α v′x 3 2 ω z = = − R . tan β vx 5 5 vx Folgerungen: Ein nicht rotierender Tennisball ( ω z = 0 ) verlangsamt diesen beim Aufprall und führt zu einer steileren Flugbahn β > α. Trifft ein solcher Ball unter einem Winkel von α = 45° auf, so 5 3 ergibt sich für den Winkel nach dem Aufprall β = arctan = 59° und v′x = vx . 3 5 Negative Werte von ω z (Topspin) erhöhen demgegenüber die Geschwindigkeit, positive bremsen ihn ab. 3v Senkrecht nach oben springt der Ball nach dem Aufprall, wenn gilt ω z = x . Noch deutlich schwe2R rer hat es der Gegner beim Tennisturnier, wenn der Ball auf genau der gleichen Flugbahn nach dem Aufprall wieder zurückfliegt, also v′x = −vx . Dazu muß der Tennisspieler dem Ball aber einen gewal7v tigen Spin verleihen: ω z = x . Schafft er das, kann er ohne Wand und gegen sich selber spielen. So 2R schwer sollte das aber nicht sein, wenn vx nur nicht zu groß ist. Das „Ass“ der Zukunft ist also nicht der Schmetterball mit 180km/h, sondern ein ganz stark angeschnittener softiger... Wenn man so tief in die Materie einsteigt, sollte man auch den Magnus-Effekt berücksichtigen, der wird aber erst in ein paar Wochen in Hydrodynamik behandelt.