Beschleunigte Bezugssysteme und Trägheitskräfte 1)
Werbung
")
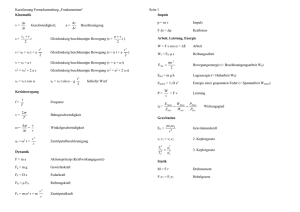
Beschleunigte Bezugssysteme und Trägheitskräfte 1) Für die Untersuchung mechanischer Erscheinungen muß man irgendein Bezugssystem2) wählen. In verschiedenen Bezugssystemen haben die Bewegungsgleichungen im allgemeinen unterschiedliche Formen. Man wird Systeme suchen, in denen die Gesetze der Mechanik die einfachste Form annehmen. Verschiedene Lagen oder Richtungen im Raum und auch verschiedene Zeitmomente sind im allgemeinen nicht mechanisch äquivalente (Homogenität und Isotropie des Raumes, Homogenität der Zeit). Selbst ein freier Körper (ohne äußere Einwirkung) kann also bei ungünstig gewähltem Bezugssystem plötzlich aus der Ruhe zu irgendwelchen Bewegungen ansetzen. Es zeigt sich jedoch, daß es immer möglich ist, ein Bezugssystem zu finden, bezüglich dessen der Raum homogen und isotrop und die Zeit ebenfalls isotrop ist. Ein solches System heißt Inertialsystem. In ihm wird sich ein freier Körper mit v = const bewegen (Trägheitgesetz 3). Die Erfahrung zeigt, daß alle geradlinig gleichförmig gegeneinander bewegten Systeme r = r’ + V t Inertialsysteme sind und die gleichen Gesetze der Mechanik aufweisen (GALILEI - NEWTONsches Relativitätsprinzip: Invarianz der Bewegungsgleichungen der Mechanik gegenüber GALILEI - Transformationen; absolute Zeit t). Darin liegt die Bedeutung von Inertialsystemen. Aus diesem Grunde werden sie auch in der Regel verwendet. In einem abgeschlossenen System von Massenpunkten stehen diese nur untereinander in Wechselwirkung, die sich als Ortsfunktion U(r1,r2,...) beschreiben läßt (Potential) und zu den Bewegungsgleichungen für Teilchensysteme Ka = - grada U führt; zweites NEWTONsches Axiom m d²r/dt² = K.4) Die Bewegung eines beliebigen kartesischen Koordinatensystems S gegenüber einem Inertialsystem S0 setzt sich zusammen aus der Bewegung R(t) des Nullpunktes von S und der Drehung (t) der Achsen von S um diesen Nullpunkt. Durch Ableitung d²r/dt² aus r0 gelangt man zur transformierten Bewegungsgleichung m dv/dt = K m d²R/dt² + m r x d/dt +2m v x + m x ( r x ) . ( K := m d²r0/dt² = grad U ). Die Terme 2 - 5 (Trägheitskräfte oder, etwas irreführend, Scheinkräfte) sind verursacht durch das beschleunigte Bezugssystem S. Term 2: beschleunigte Translation (Trägheitskraft), Term 3: beschleunigte Rotation, Term 4: CORIOLIS - Kraft, Term 5: Zentrifugalkraft. Diese Kräfte dienen quasi nur dazu, den Massenpunkt bei Abwesenheit einer äußeren Kraft K in Inertialsystem auf einer Geraden zu führen, rühren allein von der Trägheit her. Daher der Name. 5) Einfache Beispiele - Ein mit einem frei fallenden Körper verbundenes System m dv/dt = m g(r0) m g (R), zum Beispiel Menschen in Erdsatelliten, zeigt in der Nähe des Nullpunktes r0 R Kräftefreiheit an. - Im beschleunigten oder bremsenden Fahrstuhl läßt sich die zusätzliche Trägheitskraft m d²R/dt² messen. - Beim Karussellfahren oder in Zentrifugen wirkt die Zentrifugalkraft. Der Einfachheit halber Drehung um die z-Achse mit = const: dv/dt = m ² r. - Bewegung auf einer konstant rotierenden Scheibe (oder Laufen in einer kurvefahrenden Straßenbahn): zusätzlich die CORIOLIS-Kraft; Schießen beim Fahren. Bewegungen auf der rotierenden Erde x: Osten, y Norden, z senkrecht Erdoberfläche, geographische Breite; Näherungen; dv/dt = [ 2 ( vz cos vy sin ); 2 vx sin ; + 2 vx cos g ] - Freier Fall aus der Höhe H; y = 0; z H g/2 t²; x gt³/3 *cos ; t² 2H/g; Ostabweichung. - Horizontale Bewegung (Flüsse, Luftströmungen) z =! 0; dv/dt = 2 sin ez x v; wie ein Karussel mit breitenabhängiger Winkelgeschwindigkeit h := sin ez. Bewegung auf der Nordhalbkugel Richtung Süd ist also mit einer West-Drift verbunden: d²x/dt² = 2 dy/dt sin . - Wurf mit v0; h(0) = 0; Ablenkung aus der anfänglichen Wurfebene x 4voz ²/g²(vozcos /3 voysin). - FOUCAULT-Pendel : Rotation der Pendelebene mit sin; von oben rechtsrum; von außen drunter weg. ________________________ 1 ) Notizen anhand von: L.D.LANDAU, E.M.LIFSCHITZ: Mechanik, ISBN 3-8171-1326-9, H.STEPHANI, G.KLUGE: Theoretische Mechanik, ISBN 3-86025-284-4. 2 ) Realisiert meistens durch ein kartesisches Koordinatensystem mit Beobachter im Nullpunkt, Richtungen entsprechend den Laborwänden und einer Uhr. 3 ) NEWTON 1687: Corpus omne perseverare in statu suo quiescende vel movendi uniformiter in directum, nisi quatenus illud a viribus impressis cogitur, statum suum mutare. 4 ) Mutationem motus proportionalem esse vi motici impressae et fieri secundum lineam rectam, qua vis illa imprimitur. 5 ) Die Frage, ob sich die Schwerkraft durch ein passend gewähltes Koordinatensystem eliminieren läßt, wird von der Allgemeinen Relativitätstheorie beantwortet.