loesung4.
Werbung

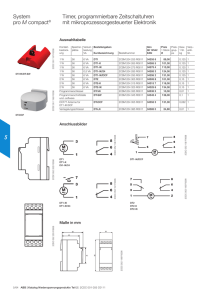
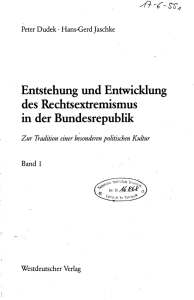
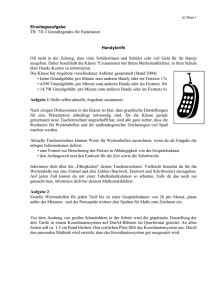
Übungen zu Theoretische Physik I - Mechanik im Sommersemester 2013 Blatt 4 vom 13.05.13 Abgabe: 27. Mai Aufgabe 16 4 Punkte Fallender Stein auf rotierender Erde Wir lassen einen Stein der Masse m in einen Brunnen fallen, der am Äquator steht. Wegen der Erdrotation folgt die Trajektorie des Steins nicht dem senkrechten Lot in Richtung Erdmittelpunkt. Diese Bewegung wird im rotierenden Bezugssystem der Erde durch m ~ ~ dX d2 X ~ = F~g − 2m~ ω× − m~ ω× ω ~ ×X 2 dt dt beschrieben, wobei der Koordinatenursprung im Erdmittelpunkt liegt und die z-Achse durch die Brunnenöffnung verläuft (siehe Abbildung). Wir nehmen an, dass die Winkelgeschwindigkeit ω ~ konstant und die Erde eine Kugel mit Radius R ist. (a) Führen Sie die Relativkoordinate ~ − R ~ez ~r = X ein, wobei R die Distanz vom Erdmittelpunkt zur Brunnenöffnung ist. Bestimmen Sie die Bewegungsgleichung für ~r(t) im erdfesten Koordinatensystem. Nehmen Sie hierbei vereinfachend an, dass die Erdanziehungskraft F~g = −mg0~ez die der ruhenden Erde und unabhängig von ~r ist. Nehmen Sie ferner an, dass die Zentrifugalkraft ebenfalls unabhängig von ~r ist, was für nicht zu tiefe Brunnen näherungsweise zutrifft. Abbildung: Die Erde in Aufsicht. Die Drehachse ω ~ zeigt zum Nordpol, der über der Papierebene auf der x-Achse liegt. Die Koordinatenachsen y und z liegen in der Äquatorialebene, was für die ~ und ~r nicht zutreffen muss. Vektoren X (b) Lösen Sie diese Bewegungsgleichung zunächst unter Vernachlässigung der Corioliskraft und berechnen Sie die Trajektorie ~r0 (t) des Steins. Zeigen Sie, dass er einer effektiven Erdbeschleunigung geff = g0 − ω 2 R unterliegt. (c) Ausgehend von dieser Trajektorie ~r0 (t) addieren wir nun die Corioliskraft. Setzen Sie dazu ~r = ~r0 +~u und zeigen Sie, dass für geeignete Anfangsbedingungen die Differenzialgleichung gilt d~u = −2~ ω × (~r0 + ~u). dt (1) (d) Nehmen Sie schließlich an, dass die Abweichung ~u vom Lot so klein ist, dass sie auf der rechten Seite von Gl. (1) vernachlässigt werden kann, und berechnen Sie für diesen Fall explizit ~u (t). Zeigen Sie, dass die Trajektorie ~r(t) gegenüber ~r0 (t) nach Osten abgelenkt wird. 1 Lösung: (a) Nach der Zeichnung gilt ~ = R~ez + ~r X wobei R der Erdradius ist. Exakt gilt die Bewegungsgleichung d~r d2~r = −g0~ez − ω ~ × [~ ω × (R~ez + ~r)] − 2~ ω× . dt2 dt Wir vernachlässigen die ~r-Abhängigkeit der Zentrifugalkraft, −~ ω × [~ ω × (R~ez + ~r)] ≈ −~ ω × [~ ω × R~ez ] . Wegen ω ~ = (ω, 0, 0) gilt −~ ω × [~ ω × R~ez ] = ω 2 R~ez . Damit bekommen wir die Differenzialgleichung d~r d2~r = (−g0 + ω 2 R)~ez − 2~ ω× 2 dt dt (b) Ohne die Corioliskraft vereinfacht sich die Bewegungsgleichung d2~r0 = −g0~ez + ω 2 R~ez , dt2 und wir erhalten mit geeigneten Anfangsbedingungen ~r0 (t) = − 1 1 g0 − ω 2 R ~ez t2 = − geff ~ez t2 2 2 (c) Wir gehen mit dem Ansatz ~r(t) = ~r0 (t) + ~u(t) in die Differenzialgleichung, d~r d2~r = −geff ~ez − 2~ ω× dt2 dt und bekommen wegen d2~r0 = −geff ~ez dt2 als verbleibende Gleichung d~r d2 ~u = −2~ ω× dt2 dt Integration über t zusammen mit ~u(0) = ~u̇(0) = ~0 und ~r(0) = ~0 liefert dann die Differenzialgleichung 1. Ordnung, d~u = −2~ ω × ~r dt ~ |~r0 |) können wir ~r durch ~r0 ersetzen und bekommen als (d) Für kleine Abweichungen vom Lot (|u| Bewegungsgleichung d~u = −2~ ω × ~r0 = ω ~ × geff ~ez t2 dt = geff t2 ω ~ × ~ez mit der Lösung ~u(t) = geff t3 geff ωt3 ω ~ × ~ez = − ~ey . 3 3 2 Aufgabe 17 2 Punkte Zentripetalkraft und Corioliskraft Wir betrachten ein Inertialsystem (IS) mit kartesischen Koordinaten (x,y,z) und ein mit der konstanten Winkelgeschwindigkeit ω = dφ/dt rotierendes Koordinatensystem KS’ mit kartesischen Koordinaten (x’,y’,z’). Die Rotationsachse möge die z-Achse sein. Wir bezeichnen mit ω ~ den Vektor mit Betrag ω und der Richtung der Drehachse (siehe Abbildung). Betrachten Sie nun einen Punkt P, der sich mit dem KS’ mitbewegt, sich aber innerhalb vom KS’ nicht ändert, also in KS’ zeitlich und räumlich konstant ist. Dieser Punkt P hat im IS die Koordinaten ~r(t) und im KS’ die Koordinaten ~r0 . Es gilt offenbar zu jedem 0 Zeitpunkt ~rIS (t) = ~rKS 0. (a) Zeigen Sie, dass im Inertialsystem für eine kleine Änderung d~rIS gilt d~rIS = ω ~ dt × ~r = ω ~ dt × ~r0 (b) Nehmen Sie nun an, dass der Punkt P im KS’ nicht konstant ist, sondern sich bewegt. Dann ist ~rKS 0 auch zeitabhängig, aber gilt trotzdem zu jedem Zeitpunkt ~rIS (t) = ~rKS 0 (t).Dann folgt aus (a) die Beziehung d~r d~r d~r = +ω ~ × ~r = +ω ~ × ~r0 , dt IS dt KS 0 dt KS 0 d. h. dass zur zeitlichen Änderung des Ortsvektors im KS’ dann im IS der Term ω ~ × ~r dazukommt. Da dies für jeden beliebigen Vektor gilt, schreibt man diese Relation auch wie folgt symbolisch: d d = +ω ~× dt IS dt KS 0 Die Geschwindigkeit des Aufpunkts im Inertialsystem ist ~v = (d~r/dt)IS ist daher verschieden von der Geschwindigkeit ~v 0 = (d~r0 /dt)KS 0 im mitbewegten Koordinatensystem. Bilden Sie nun 2 d ~r d d~r = , dt2 IS dt IS dt IS indem Sie die vorherige Relation zweimal anwenden und zeigen Sie, dass gilt 2 2 d ~r d ~r = + 2(~ ω × ~v 0 ) + ω ~ × (~ ω × ~r0 ) dt2 IS dt2 KS 0 3 Lösung: (a) Aus der Zeichnung folgt |d~rIS | = dφ r sin θ und die Richtungen d~rIS ⊥ ~r und d~rIS ⊥ ω ~ , woraus das Resultat folgt. (b) Es gilt d2 dt2 d d d d = +ω ~× dt dt dt IS dt KS 0 IS IS d d d = +ω ~× + ω ~× +ω ~× dt KS 0 dt KS 0 dt KS 0 = IS Wenden wir diese Relation nun auf ~r an, erhalten wir 2 d ~r d d~r d~r = + ω ~ × ~ r + ω ~ × + ω ~ × ~ r dt2 IS dt KS 0 dt KS 0 dt KS 0 2 d ~r d~r d~r = +ω ~× +ω ~× +ω ~ ×ω ~ × ~r dt2 KS 0 dt KS 0 dt KS 0 und damit das behauptete Resultat. Beachten Sie, dass ~r = ~r0 gilt. Aufgabe 18 1 Punkt Rotierende Bezugssysteme Die Beschleunigung eines Teilchens der Masse m an der Stelle ~r (t) in einem nicht-inertialen Bezugssystem, welches mit einer konstanten Winkelgeschwindigkeit von ω ~ um den Ursprung rotiert ist gegeben durch F~ d2~r ~ṙ − ω = − 2 ω ~ × ~ × (~ ω × ~r) dt2 m . Berechnen Sie die kartesischen Komponenten der Beschleunigung, falls ω ~ || ~ey . Lösung: Die Winkelgeschwindigkeit ist ω ~ = ω~ey . Dies liefert uns für die Beschleunigung ~ ~r̈ = F − 2ω ~ey × ~ṙ − ω 2~ey × (~ey × ~r) m F~ = − 2ω ~ey × ~ṙ − ω 2~ey (~ey · ~r) + ω 2~e2y ~r m F~ = − 2ω ~ey × ~ṙ − ω 2 y~ey + ω 2~r m Fx 2 m − 2ω ż + ω x Fy = m Fz 2 m + 2ω ẋ + ω z Aufgabe 19 (2) (3) (4) (5) 3 Punkte Koordinatensystem auf rotierender Scheibe Ein Teilchen fällt senkrecht in einem homogenen Gravitationsfeld auf eine rotierende Scheibe zu. Das Teilchen befinde sich anfangs in Ruhe in der Höhe h und einem radialen Abstand ρ vom Zentrum der Scheibe. Die Scheibe rotiert mit einer konstanten Winkelgeschwindigkeit von ω ~ um seine Symetrieachse (die z-Achse). Integrieren Sie die Bewegungsgleichungen in dem rotierenden Koordinatensystem, welches fest mit der rotierenden Scheibe verbunden ist und berechnen Sie die Zeit und den Ort des Aufpralls des Teilchens auf der Scheibe. 4 Tipp: Benutzen Sie, dass die Beschleunigung eines Teilchens der Masse m an der Stelle ~r (t) in einem mit der konstanten Winkelgeschwindigkeit ω ~ rotierenden Referenzsystems durch die Formel aus Aufgabe 18 gegeben ist. Drücken Sie diese Gleichung in Zylinderkoordinaten aus, um drei Differentialgleichungen entsprechend der drei Basisvektoren ~eρ , ~eϕ , ~ez zu erhalten.Benutzen Sie die ~ez -Richtung für die Berechnung des Aufprall Zeitpunktes. Multiplizieren Sie dann die Gleichung für die ~eϕ -Richtung mit ρ und integrieren Sie diese, um ϕ(t) zu erhalten. Bedenken Sie, dass das Teilchen anfangs in Ruhe ist. Jedoch nur in Bezug auf ein nicht rotierendes Koordinatensystem. Daher gilt im rotierenden zylindrischen Koordinatensystem ρ̇ (0) = 0 und ϕ̇(0) = −ω. Lösung: Drücke den Ortsvektor ~r und die Winkelgeschwindigkeit ω ~ in Zylinderkoordinaten ~r = ρ~eρ + z~ez (6) ω ~ = ω~ez (7) mit den Einheitsvektoren ~eρ = (cos ϕ, sin ϕ, 0) (8) ~eϕ = (− sin ϕ, cos ϕ, 0) (9) ~ez = (0, 0, 1) (10) aus. Die Zeitableitungen dieser Basisvektoren sind ~ėρ = ϕ̇~eϕ , ~ėϕ = −ϕ̇~eρ , ~ėz = 0 ~ëρ = ϕ̈~eϕ − ϕ̇2~eρ (11) (12) Damit bekommen wir für die Zeitableitung von ~r ~ṙ = ρ̇~eρ + ρ~ėρ + ż~ez = ρ̇~eρ + ρϕ̇~eϕ + ż~ez ~r̈ = ρ̈~eρ + 2ρ̇~ėρ + ρ~ëρ + ż~ez = ρ̈ − ρϕ̇2 ~eρ + (2ρ̇ϕ̇ + ρϕ̈) ~eϕ + z̈~ez Daraus erhalten wir für die Bewegungsgleichungen ~r̈ = ρ̈ − ρϕ̇2 ~eρ + (2ρ̇ϕ̇ + ρϕ̈) ~eϕ + z̈~ez F~ = −2 ω ~ × ~ṙ − ω ~ × (~ ω × ~r) m = −g~ez − 2ω~ez × (ρ̇~eρ + ρϕ̇~eϕ + ż~ez ) − ω 2~ez × (~ez × (ρ~eρ + z~ez )) (13) (14) (15) (16) (17) 2 (18) ~ez × ~eρ = ~eϕ , ~ez × ~eϕ = −~eρ (19) = −g~ez − 2ω ρ̇~eϕ + 2ωρϕ̇~eρ + ω ρ~eρ wobei wir die Relationen 5 benutzt haben. Betrachten wir nun die Komponenten für die drei Basisvektoren einzeln, erhalten wir die drei Differentialgleichungen ρ̈ − ρϕ̇2 = 2ω ϕ̇ρ + ω 2 ρ ~eρ : (20) ~eϕ : 2ρ̇ϕ̇ + ρϕ̈ = −2ω ρ̇ (21) ~ez : z̈ = −g (22) Zuerst lösen wir die ~ez -Gleichung um den Zeitpunkt für den Aufprall zu bestimmen. s 1 2 2h z (0) = h, ż (0) = 0 ⇒ z = h − gt ⇒ Aufprall auf Platte beiT = 2 g (23) Nun multiplizieren wir die ~eϕ -Gleichung mit ρ. 2ρ̇ρϕ̇ + ρ2 ϕ̈ = −2ω ρ̇ρ ⇐⇒ d d 2 ρ φ̇ = −ωρ2 dt dt (24) Integration liefert ρ2 φ̇ + ωρ2 = konst. = 0 da ϕ̇(0) = −ω (25) φ̇ = −ω ⇐⇒ ϕ(t) = −ωt + ϕ0 (26) oder Einsetzen des Ergebnisses in die ~eρ -Gleichung gibt uns ρ̈ = 0 (27) ρ (0) = R, ρ̇ (0) = 0 (28) ρ (t) = R (29) Mit den Anfangsbedingungen erhalten wir als Lösung Damit ist der Ort des Aufpralls s ρ (T ) = R, ϕ(T ) = ϕ0 − ω 6 2h g (30)