Mechatronische Wandler
Werbung

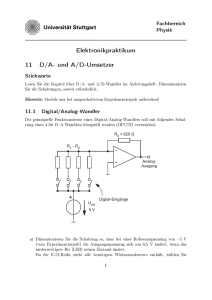
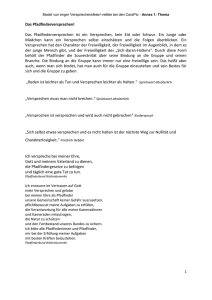
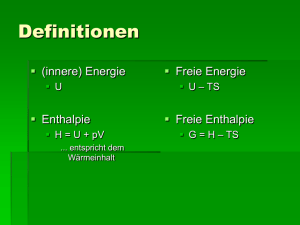
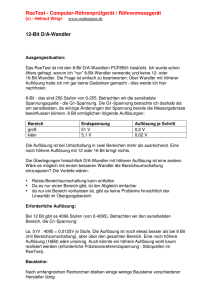
P. Will, Hochschule Mittweida Mechatronische Wandler [email protected] Mechatronische Wandler transformieren als Sensor bzw. Empfänger eine zeitvariante mechanische Kenngröße (z. B. Kraft, Druck, Beschleunigung, Geschwindigkeit, Drehmoment) in elektrische Signale (Spannung, Strom). Auch der inverse Vorgang ist möglich (Aktor, Schwingungsgeber, Sender). Da Wandler ein komplexes System sowohl mechanischer als auch elektrischer Wirkungen darstellen, eignen sie sich sehr gut, um spezifische, mechatronische Problemlösungen in der Technik grundlegend zu verdeutlichen. Elektrodynamischer Wandler Elektrodynamische Wandler basieren auf der Wechselwirkung zwischen einem permanenten, feststehenden Magnetfeld mit der Induktion B und einem beweglichen Leiter in Form einer Schwingspule oder einer Metallfolie. Stehen äußere Kraft F, Magnetfeld und Stromrichtung senkrecht aufeinander, so hat die resultierende Kraft, welche einen stromdurchflossenen, elastisch und gedämpft gelagerten Leiter (Länge l, Masse m, Nachgiebigkeit n, Dämpfungskonstante d) gegen das Magnetfeld bewegt, den Wert: x + dx˙ = vZ mech n ˙˙ + F − BlI = mx Das Verhältnis aus komplexer Erregerkraft und komplexer Geschwindigkeit ist die mechanische Impedanz des schwingungsfähigen Systems. ω ω 2 Z mech = mω2D o + i1 − 2o ω ω Letztere charakterisiert die mechanischen Reaktanzen (Trägheit, Verformung, Dämpfung) des Masse- Feder- Schwingers mit der Eigenkreisfrequenz ωo und dem Dämpfungsgrad D. I n B F, v BlI m d x BlI (Lorentz-Kraft) Bei Bewegung des Leiters mit der Geschwindigkeit v im Magnetfeld wird eine elektrische Spannung induziert. Zwischen induzierter Spannung und Geschwindigkeit besteht ein linearer Zusammenhang. U = Blv (Induktionsgesetz) In den vorliegenden Wandlergleichungen sind noch der innere Spannungsabfall über der Induktivität L der Schwingspule sowie über deren Widerstand R zu berücksichtigen. U + I(iωL + R ) = Blv [email protected] Zusammengefasst ergeben sich daraus folgende Wandlergleichungen: U = I 1 −(iωL + R ) τ 1 τ 2 + Z mech (iωL + R )F −Z mech v mit der Wandlerkonstanten τ = Bl oder als Vierpolnetzwerk in Form einer Kettenverbindung von Zweitorsystemen U 1 1 −(iωL + R ) τ 2 = 1 I τ 0 0 1 F 00 11 −Z mech v bzw. für einen realen Sender F 1 Z mech = v τ 1 τ 2 + Z mech (iωL + R )U iωL + R I oder als Vierpolnetzwerk F = v 1 Z mech τ 1 11 00 0 1 iωL + R U 1 I τ 2 0 Hysterese- und Wirbelstromeffekte wurden vernachlässigt. Das zum elektrodynamischen Wandler gehörige Vierpolnetzwerk ist heterogen aufgebaut. Es enthält sowohl mechanische als auch elektrische Zweitore. Mit der Einführung elektrischer Entsprechungen der mechanischen Komponenten lassen sich elektrische Ersatzschaltungen ableiten, die in Form eines Pseudoelektrischen Schemas (PES) mit rein elektrischen Eingangsund Ausgangsgrößen das gleiche frequenzabhängige Verhalten zeigen wie das originale Netzwerk. Die Empfängergleichung lässt sich formal darstellen in der Form: U = I 2 1 1 −(iωL + R ) τ τ 0 1 0 1 I1 τ 00 11 −Z mech U1 / τ mit den neu definierten, pseudoelektrischen Eingangsgrößen I1 F / τ = U1 vτ Daraus folgt U 1 −(iωL + R )0 I1 1 = 2 1 I 0 1 −Z mech / τ U1 Ersetzt man den Ausdruck für die modifizierte, mechanische Impedanz [email protected] Z mech iωm 1 d = 2 + + 2 2 2 iωnτ τ τ τ durch eine analoge elektrische Admittanz mit gleichem Frequenzverhalten Y = iωC m + 1 1 + iωL n R d mit den elektrischen Entsprechungen (Kapazität, Induktivität, Widerstand) C m = m / τ 2 L n = nτ 2 R d = τ 2 / d , so ergibt sich folgendes PES: Pseudoelektrisches Schema des elektrodynamischen Wandlers L U 1=v τ I 1 =F/ τ Ln Cm Rd R U I Die Analyse des skizzierten, pseudoelektrischen Zweitors ist mittels gängiger Software bzw. mit experimentellen Methoden der Elektrotechnik zur Bewertung elektrischer Vierpole durchführbar. Dies ist von besonderem Vorteil bei der Bewertung und Optimierung von transienten Erregungen bzw. Schaltvorgängen an Aktoren. Das vorliegende Schema erleichtert auch die Anpassung des Systems an Verstärker oder an elektronische Schaltungen, welche die elektrischen Ausgangssignale weiterverarbeiten. Es erscheint wichtig, darauf hinzuweisen, dass die pseudoelektrischen Schaltkreise nicht immer schaltungstechnisch realisiert werden können, da einige ihrer Komponenten u. U. Kennwerte hätten, die in Form realer Bauelemente nicht zur Verfügung stehen. [email protected] Elektrodynamischer Sender (Tieftöner) Die Spannung U am Eingangstor eines elektrodynamischen Senders (Membranfläche A) ist mit dem Schalldruck p und der Schallschnelle v am Ausgang des Zweitors über folgende Beziehungen verknüpft: τ 2 + Z mech (iωL + R ) iωL + R U=− F+ v τ τ F = −Ap v= p Z Die spezifische Schallimpedanz Z eines Kugelstrahlers (0. Ordnung), der ein hinreichend gutes Modell realer Lautsprecher darstellt, lautet: Z= Z0 iω 1− k ω Der Parameter Zo kennzeichnet die Schallkennimpedanz des Ausbreitungsmediums Luft; die Kreisfrequenz ωk steht für des Verhältnis aus Schallgeschwindigkeit und Strahlerradius. Der elektroakustische Übertragungsfaktor des Senders hat damit den Wert: 1 p αZ o = 2 U τ ω 1 + 2 C1 (ω) + αC 2 (ω) ωe mit den beiden funktionalen Beziehungen: 2 ω 2o ω k 2 ω 2o ω 2 ω k2 C1 (ω) = β + 2β2D + 1 − 2 + 4 D + 2 1 − 2 1 + 2 ω ω o ω ω ω o 2 ω ω ω − ω 2 ω 2o C 2 (ω) = α + 2β + 4 D1 + k + 2 k e 1 − ω eω o ω 2 ωe Die Größen ωe und ωo kennzeichnen systemeigene Kreisfrequenzen: ωo = 1 mn ωe = R L Die Parameter α und β stehen für folgende Ausdrücke: α= τ 2nω o R β = AZ onω o Das akustische Übertragungsmaß eines elektrodynamischen Basslautsprechers zeigt in Abhängigkeit vom Dämpfungsgrad D folgendes frequenzabhängiges Verhalten: [email protected] pU/T max) 0 20lg(T D=0.8 D=0.6 α=0.5 β=0.5 -20 0.0 ω k / ω o=10 0.5 1.0 ω e / ω o=20 lg( ω / ωο ) Elektrodynamischer Tieftöner: Übertragungsmaß (normiert) Die äußere Form der vorliegenden Kurve wird im wesentlichen durch den Dämpfungsgrad D des Wandlers sowie das Verhältnis der elektronischen, oberen Grenzfrequenz ωe zur mechanischen, unteren Grenzfrequenz ωo bestimmt. Die elektrische Eingangsimpedanz des betrachteten elektrodynamischen Tieftöners zeigt im akustischen Kurzschluss (F=0), welcher näherungsweise dem Betriebszustand Leerlauf entspricht, folgendes Verhalten: |Z/R| 2.0 D=0.8 D=0.6 1.5 α = 0.5 ω e / ω o = 20 1.0 0.0 0.5 1.0 1.5 lg( ω / ω o ) Dynamischer Tieftonlautsprecher: Eingangsimpedanz [email protected] Die obige Grafik entspricht folgender, mathematischer Beziehung: ωo ω2 α + 4 D + 2 1 − 2 ω2 ωe ωo U = R 1 + 2 + α 2 I ωe ω o2 ω 2 2 4 D + 2 1 − 2 ω ωo [email protected] Elektromagnetischer Wandler Elektromagnetische Wandler bestehen aus Elektromagnet und beweglichem Weicheisenanker, welche einen magnetischen Kreis darstellen, der durch einen Luftspalt der Breite x unterbrochen ist. Im Gegensatz zum dynamischen Wandler wird beim magnetischen Wandler durch Veränderung des Luftspalts die Magnetfeldstärke H variiert. Anker FM F, v U, I FM x Magnetische Kraft FM 1 FM = µ oSH 2 2 µo S Permeabilität der Luft wirksame Fläche im Luftspalt und äußere Ankerkraft F steuern die Bewegung des federnd gelagerten Ankers. Die rücktreibende Federkraft der vorgespannten, elastischen Ankeraufhängung (Nachgiebigkeit n, Auslenkung ∆xo< 0) wird als statischer Anteil Fo der äußeren Kraft zugeordnet. Fo = − ∆x o n Letzterer kompensiert im Gleichgewichtszustand (Ankerkoordinate xo) die magnetische Anziehungskraft infolge Vormagnetisierung (Gleichstromanteil Io). Die äußere Last F beinhaltet außerdem einen signalabhängigen, zeitvarianten Wechselanteil ∆F(t). Die Bewegungsgleichung des Ankers lautet damit: ˙˙ + F − 2FM = mx m n d x − xo + dx˙ n schwingende Masse Nachgiebigkeit der Aufhängung Dämpfungskonstante Die zeitvariante Magnetfeldstärke H im Luftspalt ergibt sich aus der Relation: [email protected] H= NI 2x + N µrFe l l µ rFe ≈ N[I o + ∆I(t )] 2[ x o + ∆x(t )] mit ∆x(t ) = x(t ) − x o Windungszahl relative Permeabilität im Eisenkern mittlerer Umfang des Eisenkerns Die ursprünglich quadratische Abhängigkeit zwischen Kraft und Magnetfeldstärke wird durch die Überlagerung eines magnetischen Gleichfelds linearisiert. Von Linearität im Übertragungsverhalten eines Systems spricht man, wenn Ausgangs- und Eingangssignal proportional zueinander sind, ohne dass am Ausgang zusätzliche Spektralanteile auftreten, die im Eingangssignal nicht enthalten waren. Im Kontext einer praktikablen Signalverarbeitung bedeutet Linearität, dass sich mehrere Eingangssignale wechselwirkungsfrei, additiv überlagern können. Eine Reihenentwicklung nach den zeitvarianten Anteilen von Strom und Spaltbreite ergibt folgende resultierende Wechselkraft zur Bewegung des elastisch und gedämpft gelagerten Ankers I oN ∆I(t ) ∆x(t ) − = vZ mech xo Io xo ∆F(t ) − Φo Die mechanische Impedanz Zmech charakterisiert die mechanischen Reaktanzen des Wandlers. Das Symbol Φο steht für den Magnetfluss der Vormagnetisierung durch den Strom Io : Φo = µ oS NI o 2xo Glieder höherer Ordnung in der erwähnten Reihenentwicklung stehen für nichtlineare Verzerrungen. Treten neben der linearen Kennlinie des Systems noch quadratische oder kubische Störanteile auf, so werden bei harmonischen Eingangssignalen mit einer Kreisfrequenz ω (Grundschwingung) innerhalb des Wandlers Oberschwingungen mit den Kreisfrequenzen 2ω, 3ω, ... erzeugt. Diese zusätzlichen, im Spektrum des Ausgangssignals nachweisbaren Komponenten verfälschen das originale Eingangssignal. Erreichen die beschriebenen Oberschwingungen Anteile von mehr als etwa 1% der originalen Grundschwingung, so machen sich diese Verzerrungen deutlich bemerkbar. Charakteristische Kenngrößen zur Quantifizierung der nichtlinearen Verzerrungen sind Klirrfaktor und Klirrkoeffizienten. Der Klirrfaktor ist definiert als Effektivwert aller Oberschwingungen normiert auf den Effektivwert des Gesamtsignals. Die Klirrkoeffizienten entsprechen den Einzelanteilen der verschiedenen Oberschwingungen am Gesamtsignal. ∞ k= ∑A 2 i i= 2 ∞ ∑A 2 i i= 1 Summiert wird über die Koeffizienten des Amplitudenspektrums, die der Grund- (Index 1) bzw. den Oberschwingungen (Index 2,3,...) im Ausgangssignal entsprechen.; praktisch genügt es, die Summen bis etwa zum Index 5 zu berechnen; Terme höherer Ordnungen sind i. Allg. vernachlässigbar. [email protected] Der Term in der linearisierten Kräftebilanz, welcher den zeitlich veränderlichen Anteil der Spaltbreite berücksichtigt, könnte formal den entsprechenden Anteilen der mechanischen Impedanz zugeordnet werden. Damit gilt: ∆F − 1 Φ NI ΦoN∆I ˙˙ + dx˙ + − o 2 o ∆x = mx xo xo n Der Faktor vor der veränderlichen Spaltbreite ∆x charakterisiert eine reduzierte, effektive Steifigkeit. In der Literatur werden häufig so genannte ideale Wandlergleichungen beschrieben, welche die Bewegung der Ankermasse m im Magnetfeld beschreiben, ohne die elastische, gedämpfte Ankeraufhängung zu berücksichtigen. In diesem Fall ergäbe sich gemäß der obigen, modifizierten Bilanz eine negative Steifigkeit des gesamten Systems, die zu einer mechanischen Instabilität des Wandlers führen würde. Die entsprechenden idealen Wandlergleichungen sind also für das Verständnis des Wandlerverhaltens unter dem Einfluss äußerer Kräfte wenig hilfreich. Zurück zur originalen, unveränderten Kräftebilanz ergibt deren Umstellung in die komplexe Spektraldarstellung (harmonische Schwingungen der Kreisfrequenz ω vorausgesetzt) folgende Empfängergleichung: x I ∆I = o (∆F − vZ mech ) + o v iωx o ΦoN Die zeitliche Rate mit der sich die Breite des Luftspalts ändert entspricht der Auslenkungsgeschwindigkeit v des Ankers v= d∆x dt Die induzierte Leerlaufwechselspannung im Wandler folgt aus dem Induktionsgesetz ∆U(t ) = µ oNS 1 d∆I 1 d∆x d∆H = ΦoN − dt I o dt x o dt Unter Berücksichtigung zeitlicher Ableitungen im komplexen, spektralen Bereich ergibt sich für den variablen Anteil des Spannungssignals folgende Beziehung: iω∆I v iωx o ∆U ≈ ΦoN − = (∆F − vZ mech ) xo Io Io Zusammengefasst in Matrixschreibweise ergeben sich aus den vorliegenden Formeln die Wandlergleichungen für den elektromagnetischen Wandler. ∆U = ∆I 1 iω τ 1 / L o ∆F −iωZ mech mit τ / iω − Z mech / L o v 2 τ= Io xo Die Wandlerkonstante τ ist unabhängig von der Windungszahl N. [email protected] Das Symbol Lo steht für die Wicklungsinduktivität: L o = µo SN 2 2xo Folgende Darstellung beschreibt die obige Wandlergleichung als Kettenverbindung von Zweitorsystemen: 2 2 ∆U 1 −1 iωL o τ L o = 1 0 ∆I τL o 0 0 1 0 2 2 ∆F τ L o 1 −Z + mech 1 iωL o v Das inverse Sendergesetz lautet: τ 2L2o 1 ∆F 1 Z mech − 1 = i L ω o 0 v τL o 0 1 0 −1 iωL o ∆U τ L2o 0 1 ∆I 2 Das beschriebenen Wandlerprinzip wird bei Tonabnehmern für Schallplatte oder Saiteninstrumente, bei Telefon- bzw. Kopfhörern und bei Miniaturmikrofonen genutzt. Ausgangspunkt für die Ableitung des PES zum vorliegenden System ist die Homogenisierung der Wandlergleichung: 0 τ 2L2o ∆I1 τL o ∆U 1 −1 iωL o 2 2 τ L o = 1 −Z 1 ∆I τL o 0 mech + ∆U1 / τL o iωL o mit den elektrischen Entsprechungen: ∆I1 ∆F / τL o = ∆U1 vτL o In der Darstellung der Wandlergleichungen als Kettenverbindung von rein elektrischen Zweitoren gilt: ∆I 1 ∆U −1 iωL o 0 Z 1 1 = 1 − mech + 2 2 ∆ I 0 1 τ L o iωL o ∆U1 Das Pseudoelektrische Schema des elektromagnetischen Wandlers entspricht damit folgender Schaltung: [email protected] ∆U1=vτLο ∆I1=∆F/τLo Cm Rd ∆U LG ∆I Lo mit den einzelnen Elementen: C m = m / τ 2L2o Kapazität R d = τ 2L2o / d Widerstand nτ 2L2o LG = 1 − nτ 2L o Induktivität [email protected] Piezoelektrischer Wandler In polaren Kristallen werden durch Deformation negative gegenüber positiven Gitterstrukturen verschoben. Es kommt zur Ladungstrennung im Kristall, so dass messbare Oberflächenladungen entstehen (Piezoeffekt). Umgekehrt bewirkt das Anlegen einer elektrischen Spannung eine Deformation des Kristalls (reziproker Piezoeffekt). Durch den Schnitt genau orientierter Stücke aus dem Kristall, können einzelne Kristall-Kraftrichtungen zur Energieumwandlung genutzt werden. Beim longitudinalen Piezoeffekt wird das elektrische Feld parallel zur Längenänderung des Kristalls abgegriffen. z ∆z A U, I Zwischen Deformation (relativer Längenänderung) und erzeugter Ladungsdichte an der Kristalloberfläche besteht folgender Zusammenhang: ∆Q ∆z =e A z 1/ ∆t → I=e A v z Die Piezokonstante e berechnet sich aus der Dielektrizitätskonstante ε und dem Elastizitätsmodul E des Kristalls zur gewählten longitudinalen Orientierung. e = εE Die mechanische Seite weist Reaktanzen auf, die als Speicher mechanischer Energie wirken. Das Kristallinnere entspricht einem mechanischen Schwingungsgebilde, welches durch seine Nachgiebigkeit, n, innere Dämpfungen, d, und eine effektive Masse, m, charakterisiert ist. Nur ein reduzierter Anteil der äußeren Kraft F steht für die Spannungserzeugung zur Verfügung; der Rest ist notwendig, um innere mechanische Trägheiten, Verformungen und zu überwinden bzw. Dämpfungen auszugleichen. Die Bewegungsgleichung des Piezoelementes lautet: F − Ae U = vZ mech z In zusammengefasster Form ergibt sich daraus die Matrixdarstellung der Wandlergleichungen für den piezoelektrischen Longitudinalwandler mit dem zugehörigen Wandlerkoeffizienten. U = I 1 1 −Z mech F mit τ 2 v τ 0 τ= eA z [email protected] Charakteristische Daten von Piezokristallen sind: As ε10−11 Vm 4 1600 500....700 Material Quarz Bariumtitanat Synth. Keramiken N e Vm 17 80 25....125 Technisch genutzte Wandler (Kristallmikrofone, Schallplattenabtaster) bestehen aus zusammengeklebten, gegensinnig polarisierten Kristallplättchen. Piezoelektrische Dämpfer reduzieren in Hochleistungsskiern unerwünschte Eigenschwingungen. Piezowandler werden schließlich als Schalter oder Feinstellelemente in der Präzisionsmechanik sowie als Ultraschall-Schwingungsgeber genutzt . Abweichend vom idealen piezoelektrischen Wandler, bei dem weder Energie verbraucht noch gespeichert wird, ist bei realen Systemen die Aufladung der Elektrodenkapazität C durch einen Ladestrom zu berücksichtigen. I + iωCU = τv Zusammengefasst ergibt sich in der Matrixdarstellung für den realen piezoelektrischen Empfänger: U = I F −Z mech 1 1 τ −iωC τ 2 + iωCZ mech v bzw. in Form eines Vierpolnetzwerkes U = I 01 0 1 −Z mech F 1 1 1 v τ −iωC 10 τ 2 0 Für die Bewertung eines Senders ist die inverse Darstellung der Wandlergleichung notwendig. F 1 τ 2 + iωCZ mech = iωC v τ Z mech U 1 I oder F 1 1 Z mech τ 2 0 1 0U = 1 0 1iωC 1 I v τ 0 Basis für die Ableitung vom pseudoelektrischen Schema des piezoelektrischen Wandlers ist die Beziehung: U 1 01 −Z mech / τ 2 U1 = 1 I −iωC 10 I1 [email protected] mit den elektrischen Entsprechungen U1 F / τ = I1 vτ Ersetzt man den Ausdruck für die skalierte, mechanische Impedanz Z mech iωm 1 d = 2 + + 2 2 2 iωnτ τ τ τ durch eine analoge, elektrische Impedanz mit gleichem Frequenzgang Z = iωL m + 1 + Rd iωC n so nimmt die zum vorgegebenen Gleichungssystem gehörige, elektrische Schaltung folgende Form an: Rd Lm U 1 = F/τ Cn C U I I 1 = vτ L m = m / τ2 Induktivität R d = d / τ2 Widerstand C n = nτ 2 Kapazität [email protected] Der mechanisch unbelastete Piezowandler (F=0) wird zum Beispiel als Schwingquarz (Sender, evakuiertes Gehäuse) verwendet; es können damit temperaturkonstante Filter sehr hoher, selektiver Güte erreicht werden. v=− τ Z mech U Der Übertragungsfaktor des entsprechenden Wandlers zeigt folgenden Frequenzgang: T= v = U τnω ω2 ω2 4 D 2 + 1 − 2 ωo ωo 2 2 Dämpfungsgrad Eigenkreisfrequenz des Wandlers Nachgiebigkeit 0 10lg(T/T o) (dB) D ωo n -10 -20 -30 D=0.001 -40 -1.5 -1.0 -0.5 0.0 lg( ω/ωο) 0.5 Übertragungsmaß (normiert) [email protected] Die elektrische Eingangsimpedanz des piezoelektrischen Wandlers bei ausgangsseitigem Kraftschluss (F=0) weist einen Frequenzgang gemäß folgender Beziehungen auf: −Z mech U = 2 I τ + iωCZ mech ω2 ω2 4 D 2 + 1 − 2 ωo ωo 1 U = 2 2 I ωC ω2 2 ω α + − + D 1 4 ω o2 ω o2 2 2 τ 2n α= C Dämpfungsgrad Eigenfrequenz des Wandlers Nachgiebigkeit Elektrodenkapazität 60 20lg|Z/Z o| (dB) D ωo n C mit α=0.1 40 D=0.001 20 0 -1.5 -1.0 -0.5 0.0 lg( ω/ωο) 0.5 Elektrische Eingangsimpedanz [email protected] Das piezoelektrische Wandlerprinzip nutzt die Verformung elektrisch aktiver Kristalle. Die Mechanik des Systems entspricht damit weniger dem Modell eines einzelnen Masse-Feder Schwingers sondern beruht auf der Dynamik von Massenverteilungen wie z.B. bei Longitudinal-, Biege- oder Torsionsschwingungen. Analoge Aussagen treffen unter Umständen auch bei allen anderen, elektromechanischen Wandlern zu. Um diese Gegebenheiten auf die bereits vorliegenden Modelle elektromechanischer Wandler anzupassen, die von singulären Massenelementen ausgehen, sind folgende Äquivalenzen sinnvoll. Das Kontinuum (Dichte ρ, Elastizitätsmodul E) wird durch einen Masse-Feder Schwinger (Masse m, Nachgiebigkeit n) ersetzt. • • Die effektive, punktförmige Masse des Federschwingers soll mit einer Amplitude schwingen, die der maximalen, lokalen Auslenkung C des Kontinuumschwingers entspricht. Die kinetischen Energien und Eigenfrequenzen der unterschiedlichen Systeme sollen sich nicht unterscheiden. Diese Vorgehensweise wird am Beispiel eines einfachen Biegeschwingers (Länge L, Querschnitt A, Flächenmoment 2. Ordnung I) verdeutlicht. x ρ, A, E, I n L m Der Biegeschwinger weist in der Eigenschwingung mit dem Index j folgende lokale Geschwindigkeitsamplitude auf (s. Will, Lämmel: Kleine Formelsammlung Technische Mechanik, 2. Auflage 1998, 169-175) : w˙ ( x) = −ω j cos κ jL + cosh κ jL C sin κ jx − sinh κ jx) cos κ jx − cosh κ jx − ( 2 sin κ jL + sinh κ jL κ1 = 1.875104 / L κ 2 = 4.694091 / L ω j = κ 2j EI ρA Eigenwerte der beiden ersten Eigenschwingungen Eigenkreisfrequenz zum Index j Die Bedingung nach gleichen, kinetische Energien beider Systeme führt auf die Beziehung: L 1 1 ρA ∫ w˙ 2 ( x)dx = mw˙ 2 ( x = L ) 2 2 0 Die Berechnung des Integrals ergibt schließlich unabhängig vom Index der Eigenschwingung eine einfache Relation zwischen der Masse des Biegeschwingers und der singulären Masse des Ersatzmodells. [email protected] m= 1 ρAL 4 Die effektiven Nachgiebigkeiten des Masse-Feder Schwingers ergeben sich aus der Forderung nach gleichen Eigenkreisfrequenzen beider Modelle. Im vorliegenden Fall gilt: nj = 1 4 L3 = mω 2j ( κ jL ) 4 EI d. h. L3 n1 = 0.3236 EI n 2 = 0.008239 L3 EI Unter Berücksichtigung der skizzierten, mechanischen Äquivalenzen lässt sich jedes Kontinuumsmodell in das Ersatzmodell eines einfachen Masse-Feder Schwingers überführen. Es ist jedoch zu beachten, dass andere Kontinuumschwinger i. Allg. auch andere Verhältniszahlen zwischen der Gesamtmasse des Systems und der singulären Ersatzmasse verwenden müssen. Die Parameter der folgenden, skizzierten Anordnung: L ρ, A, E, I n m haben die Werte 1 m = ρAL 2 bzw. nj = 2 L3 4 ( jπ) EI In der ersten Eigenschwingung weichen die Resultate für die Nachgiebigkeiten der beiden untersuchten Biegeschwinger nur geringfügig von den Werten der statischen Nachgiebigkeit ab, die sich aus dem Verhältnis der maximalen Auslenkung der Bieger zur zugehörigen Kraft ergeben würden. Die Wandlergleichungen der elektromechanischen Wandler, die auf der Basis der vereinfachenden Ersatzmodelle mit singulärer Masse abgeleitet wurden, können damit auch das dynamische Verhalten komplexerer Systeme mit kontinuierlich verteilten Massenelementen beschreiben. [email protected] Typische, technische Anwendungen piezoelektrischer Wandler sind Schaltvorgänge. In der Form von Piezobiegeaktoren werden sie u. a. eingesetzt als Umschalter in mikrooptischen Fasersystemen und zur Ansteuerung von Lese- und Schreibköpfen in verschiedensten Computerspeichermedien. Entscheidende Charakteristika derartiger Applikationen sind zu einem die Schaltwege in Abhängigkeit von den Steuerspannungen und zum anderen das dynamische Verhalten der Systeme. Das piezoelektrische Wandlerprinzip nutzt die Verformung elektrisch aktiver Kristalle. Die lokale Durchbiegung uz(x) eines bimorphen Piezobiegers ergibt sich aus folgender Differentialgleichung der Biegelinie: d 2u z 3Ue = dx 2 2h 2E Im vorliegenden Fall werden zwei identische Schichten der Dicken h mit den Spannungen U angesteuert, wobei sich ihre Polarisationen bzgl. der vorgesehenen Biegerichtung ergänzen sollen. Der Parameter e steht für die Piezokonstante des Materials mit dem Elastizitätsmodul E. Im Allg. sind die verwendeten Piezobiegestrukturen nur sehr schwach gedämpft, so dass ihre Schaltdynamik durch ein Systemverhalten gemäß folgendem Diagramm beschrieben werden kann. 1 Sprungfunktion Sprungantwort 0 0 10 20 ω οt Sprungantwort Die vorliegende Abbildung zeigt die normierte Auslenkungsgeschwindigkeit als Reaktion auf eine normierte Sprungfunktion für einen vorgegebenen Piezomikrobiegeschalters mit der Eigenkreisfrequenz ωo. Zusätzlich zur geringen Eigendämpfung des Piezomaterials wird dabei eine schwache, externe Dämpfung der Anordnung im Umgebungsmedium angenommen. Es kommt zu einem deutlichen Über- und Nachschwingen des Schalters um seine Endlage. Diese Vibrationen führen letztendlich zu verlängerten Schaltzeiten, welche die Periodendauer der schwach gedämpften Schwingung um eine Größenordnung überschreiten. Wie die obige Abbildung zeigt, kommt die Dynamik des Schaltprozesses erst nach einer Zeit zum Erliegen, die deutlich größer ist als die Periodendauer der 1. Eigenschwingung des niedrig gedämpften Systems. Die Ansteuerung des Schalters mittels Sprungfunktion ist damit unge- [email protected] eignet. Ausgehend vom PES des Piezowandlers lässt sich zeigen, dass wesentlich bessere Ergebnisse mit einer, transienten Schaltfunktion folgender Zeitabhängigkeit erreicht werden. U(t ) = U o (1 − 2ω ote− ω o t ) Die Amplitude des Schaltsignals wird zunächst kurzzeitig verringert, um danach wieder schnell auf ihren stationären Endwert Uo hochgefahren zu werden. Die Schaltspannung wird aperiodisch innerhalb eines zeitlichen Intervalls variiert, dessen Dauer umgekehrt proportional zur 1. Eigenkreisfrequenz ω1=ωo des Schalters ist. Die folgende Abbildung zeigt die Auslenkungsgeschwindigkeit bzw. die zugehörige Entsprechung I1 als Reaktion auf die modifizierte Schaltfunktion. Die Modellierung des Schalters unter Verwendung eines PES für den piezoelektrischen Wandler erfolgte mit der Simulationssoftware PSPICE (Version 8); die Kurven wurden wie im ersten Diagramm normiert. Die Antwort des Systems (Dämpfungsgrad D<<1) auf die optimierte, transiente Ansteuerung besitzt ihrerseits folgende mathematische Struktur: ( I1 (t ) = Aω ote− ω o t − Be− Dω o t sin ω ot 1 − D2 ) 1.0 Piezobiegeschalter: Ansteuerung Systemantwort 0.5 0.0 0 10 20 ω οt Optimierte Schaltfunktion Die Dynamik des eigentlichen Schaltvorgangs klingt innerhalb kürzester Zeit exponentiell ab und geht über in ein unkritisches, gedämpftes Nachschwingen mit einer deutlich kleineren Amplitude als die originale Sprungantwort. [email protected] Piezoelektrischer Dämpfer Die optimierte Ansteuerung des Schalters beruht auf der Analyse einer diskreten, elektrischen Schaltung mit einer Eigenkreisfrequenz, die der 1. Eigenschwingung des realen Kontinuummodells entspricht. Der Piezobieger weist in seiner Dynamik aber verschiedene Eigenschwingformen auf: 1 2 3 0.0 0.2 0.4 0.6 0.8 x/L Biegeeigenschwingungen Entscheidend für ein effizientes Funktionieren des Schalters ist neben einer sinnvollen Steuerung des Schaltprozesses die Vermeidung bzw. Reduzierung möglicher, höherer Eigenschwingformen im elektromechanischen System. Dies ist dadurch erreichbar, dass der Piezobieger simultan als piezoelektrischer Dämpfer, z.B. abgestimmt auf die 2. Eigenschwingung, betrieben wird. Die Wirkungsweise des Piezodämpfers ergibt aus folgender Abbildung Das Ausgangstor des Piezowandlers, gerahmt dargestellt in Form eines PES, wird mit einer, auf die zu unterdrückende Frequenz abgestimmten RLC-Kombination abgeschlossen. Lm Rd C U1, I1 C Ca L R Piezoelektrischer Dämpfer (PES) Die resultierenden Admittanz der Gesamtschaltung führt über die dissipative Vernichtung mechanischer Schwingungsenergie am Widerstand R zur Dämpfung der mechanischen Struktur. Es gilt: I1 Cnω = 2 U1 2 ω2 g 2 (ω) 2 ω 1 − 2 + 4 D 2 + α ωo ωo (1 + g12 (ω)) [email protected] Die einzelnen Größen bedeuten: (I1,U1) D ω ωo g1 (ω) = pseudoelektrische Signale am Eingang des Piezowandlers Dämpfungsgrad des Piezowandlers Erregerkreisfrequenz Eigenkreisfrequenz der Wandlerstruktur ω ω − RL ω RC ω 2 ω2 ω ω g 2 (ω) = ( 4 D + α ) + 2g1 (ω)1 − 2 ωo ω o ω o α= Cn ω o C + C a ω RC ω RC = 1 (C + C a )R ω RL = R L Die nächste Abbildung zeigt die Frequenzgänge entsprechender Admittanzen zu unterschiedlichen RLC-Abschlusskombinationen. Im vorliegenden Fall beziehen sich die Resultate im Gegensatz zum vorausgegangenen Abschnitt auf die Eigenschwingung 2. Ordnung ω2=ωo. Das Diagramm verdeutlicht mögliche Variationen im Dämpfungsverhalten einer ausgewählten, realen Anordnung. Die gestrichelte Kurve gibt die Reaktion des Piezobiegers auf periodische Erregungen ohne dämpfenden Widerstand R wieder. Neben einer gleichmäßigen Reduzierung der Schwingungen um etwa 20% in einem begrenzten Intervall um die Eigenkreisfrequenz ωo (durchgezogene Kurve), sind auch wesentlich höhere Dämpfungsgrade in einem schmalbandigeren Bereich realisierbar (gepunkteter Kurvenzug). 1.0 0.8 0.6 0.4 0.2 0.8 0.9 1.0 1.1 ω /ωο 1.2 Piezoelektrischer Dämpfer Größere Konstruktionen wie z.B. Lautsprechermembranen oder sogar Snow Boards können nach dem gleichen Prinzip wie die beschriebenen Mikroaktoren lokal gedämpft werden. [email protected] 1.0 0.5 ohne Dämpfungselement ( α= 0) Piezo-Schwingungsdämpfer ( α= 0.5) 0.0 0.0 0.5 1.0 1.5 ω / ωο Lokale piezoelektrische Dämpfung einer makroskopischen Struktur Kompositwerkstoffe mit eingebetten Piezoelementen in Bereichen hoher Verformungen ermöglichen in Analogie zu den vorgestellten Überlegungen die Reduzierung vorgegebener Eigenschwingformen auch in makroskopischen Strukturen. Durch die Beschränkung der Dämpfung auf lokale Bereiche mit hoher Nachgiebigkeit sind günstigere Werte des Parameters α als bei mikroskopischen Anordnungen erreichbar. Dies führt neben der stärkeren, mechanischen Eigendämpfung D des makroskopischen Bauteils zu wesentlich größeren Dämpfungswerten über einen breitbandigen Frequenzbereich. Die vorliegenden Ergebnisse basieren auf der Analyse eines mechatronischen Systems; die Kombination aus Mechanik, Elektro-, Regeltechnik und Signaltheorie gewährleistet die überschaubare Modellierung und Simulation piezoelektrischer Aktoren und Dämpfer. Damit sind prinzipielle Untersuchungen zur Optimierung entsprechender, heterogener Kompositstrukturen möglich. [email protected] Dielektrischer Wandler Das dielektrische Wandlerprinzip wird sowohl beim Kondensatormikrofon als auch beim kapazitiv betriebenen Lautsprecher genutzt. In seiner einfachsten Form stellt der dielektrische Wandler einen Kondensator mit dünner schwingungsfähiger Elektrode und starrer Gegenelektrode dar. Auch kleinste translative Verschiebungen oder Kippungen in Bauelementen der Mikrooptik (z. B. Fabry-Perot Interferometer, abstimmbare optische Resonatoren oder elektrostatisch ansteuerbare Spiegelarrays) sind auf diese Art und Weise realisierbar. F,v I z ∆U FE Uo Unter dem Einfluss einer äußeren Last F sowie der inneren Kraft FE zwischen beiden Elektroden wirkt folgende resultierende Kraft auf die aktive Elektrode. F − FE = vZ mech Die äußere Kraft beinhaltet zwei Komponenten - einen statischen Anteil Fo entsprechend der vorgespannten, elastischen Membran (Nachgiebigkeit n), welcher die elektrostatische Anziehungskraft zwischen den Elektroden (Gleichspannungsanteil Uo, Gleichgewichtslage zo) kompensiert, sowie einem signalabhängigen, zeitvarianten Wechselanteil ∆F(t). Die Anziehungskraft FE der Elektroden im elektrischen Feld und die äußere Kraft F steuern die Bewegung der federnd gelagerten aktiven Elektrode. FE = Q 2 U 2C = 2εA 2z Die Ladung Q eines Plattenkondensators (Abstand z, Fläche A, Spannung U) hat den Wert: Q = CU = εA U z Der Wechselanteil der Ladung in Abhängigkeit von Spannungs- bzw. Ladungsänderungen berechnet sich aus: ∆z ∆Q(t ) = C o ∆U − U o zo Co = εA zo Uo steht für die zur Ruhekapazität Co gehörige Gleichspannung. Die Differentiation der vorliegenden Gleichung führt in der komplexen Zeigerdarstellung auf folgende Beziehung: [email protected] U I = C o iω∆U − o v zo Es besteht ein nichtlinearer Zusammenhang zwischen Kraft und Spannung. Da man den Wandler mit einer konstanten Vorspannung Uo betreibt: U = U o + ∆U(t ) U o >> ∆U , lässt sich die Kraft-Spannungsbeziehung für ihre zeitvarianten Signalanteile linearisieren. ∆F ≈ C oU o ∆z ∆U(t ) − U o + vZ mech zo zo Die Zeigerdarstellung der letzten Gleichung in der komplexen Ebene führt auf das Kraftgesetz des dielektrischen Wandlers: ∆U = Uo v z + o (∆F − vZ mech ) z o iω C oU o mit ∆z = ∫ vdt = v / iω Aus den vorliegenden Beziehungen ergeben sich in Matrixschreibweise die Wandlergleichungen für den dielektrischen Wandler. ∆U = I 1 1 / C o τ iω τ 2 / iω − Z mech / C o ∆F mit −iωZ mech v τ= Uo zo oder in Form einer Zweitorverbindung 2 2 ∆U 0 1 0 1 −Z mech + τ C o ∆F 1 1 = iωC o 2 2 v I τC o iωC o −10 τ C o 0 1 Die vom dielektrischen Empfänger abgegebene Signalspannung ist um so größer, je höher die Feldstärke Uo/zo ist. Die inverse Sendergleichung des realen Wandlers entspricht folgendem Netzwerk: τ 2C 2o 2 2 1 ∆F 0 ∆U 1 1 Z mech − τ Co 0 = i C ω o 1iωC o −1 I v τC o 0 0 1 Sehr hohe Ruhekapazitäten Co vorausgesetzt, weisen kapazitive Empfänger bei i. a. sehr niedrigen mechanischen Impedanzen Zmech unter Berücksichtigung der Beziehung ∆U = I iωC in der Korrelation zwischen Strom und Schnelle I = τC o v [email protected] einen linearen Frequenzgang auf. Sie werden daher häufig in der Messtechnik als Eichmikrofone gebraucht. Das PES des dielektrischen Wandlers lässt sich unter Verwendung folgender elektrischer Entsprechungen ableiten. ∆U1 ∆F / τC o = I1 vτC o Die Wandlergleichungen nehmen damit eine homogene Form bzgl der Eingangs- bzw. der Ausgangsgrößen des zugehörigen Vierpols an. ∆U 1 0 1 −Z mech / τ 2C o2 + 1 / iωC o ∆U1 = 1 I iωC o −10 I1 Der vorliegenden Gleichung entspricht in ihrer mathematischen Struktur der pseudoelektrischen Schaltung Lm Rd ∆ U 1= ∆ F/τC o CG Co ∆U I I 1 = v τ Co mit den einzelnen Elementen: Induktivität L m = m / τ 2C 2o Widerstand R d = d / τ 2C o2 Kapazität CG = nτ 2C o2 1 − nτ 2C o [email protected] Kondensatormikrofon (NF- Schaltung) I ∆U F, v Ra Das Ausgangstor des Wandlers wird mit dem Widerstand Ra hochohmig abgeschlossen. Die Wandlergleichungen, welche den Zusammenhang zwischen elektrischen und mechanischen Größen beschreiben, haben die konkrete Form: ∆U = I= ∆F τ Z mech + − v C o τ iω C o τ iω (∆F − Z mech v) τ Interessanterweise beeinflusst das Mikrofon mit dem Abschluss durch den Widerstand Ra auf der Ausgangsseite des dielektrischen Wandlers und der entsprechenden Rückkopplung auf dessen Eingangstor die Relation zwischen den akustischen Eingangsgrößen Schalldruck und Schallschnelle. Das Mikrofon verändert damit, lokal begrenzt, das originale Schallfeld, in dem Druck und Schnelle z. B. im ebenen Schallfeld linear über die Schall-Kennimpedanz miteinander korrelieren. Unter Beachtung dieses rückkoppelnden Abschlusswiderstands Ra ergibt sich für den Übertragungskoeffizienten eines Druckempfängers mit der Membranfläche AM die Beziehung: −AMR a ∆U = τ iωZ mech 1 ∆p + R a − iω iωC o τ Der Übertragungskoeffizient des Mikrofons zeigt folgendes frequenzabhängiges Verhalten: ∆U AM τn = 2 ∆p 2 ω 2 ω 2e ω 2 ω2 ωe 2 ωe − + D D 1 1 + 2 − α + 4 + 2 α 1 − 2 2 2 2 ω 2o ωo ω ωo ωo ωo Das Symbol D steht für den Dämpfungsgrad der mechanischen Komponenten. Die Parameter ωo und ωe charakterisieren die mechanische Eigenkreisfrequenz des MasseFederschwingers (Masse m, Nachgiebigkeit n) bzw. die elektrisch bedingte, untere Grenzfrequenz des Wandlers. ωo = 1 mn ωe = 1 R aCo Der dimensionslose Parameter α fasst folgenden Ausdruck zusammen: [email protected] τ 2n R aω o 0 20lg(T Up / T max) α= D=0.8 D=0.6 -5 α=0.1 ω e / ω o =0.01 -10 -2 -1 0 lg( ω / ω o ) Übertragungsmaß (normiert) [email protected]