Kinematik des Massenpunktes
Werbung

Technische Mechanik II
Kinematik des Massenpunktes
Prof. Dr.-Ing. Ulrike Zwiers, M.Sc.
Fachbereich Mechatronik und Maschinenbau
Hochschule Bochum
WS 2009/2010
Kinematik des Massenpunktes
Übersicht
1. Kinematik des Massenpunktes
◦ Eindimensionale Punktbewegung
◦ Ebene Punktbewegung
- Orts-, Geschwindigkeits- und Beschleunigungsvektor
- Bewegung auf kreisförmiger Bahn
- Darstellung in Polarkoordinaten
◦ Räumliche Punktbewegung
- Frenet-Serret-Gleichungen
- Darstellung in Zylinderkoordinaten
2. Kinematik des starren Körpers
3. Kinetik des Massenpunktes
4. Kinetik des starren Körpers
5. Stossprobleme
Prof. Dr. U. Zwiers
BTM2
2/23
Kinematik des Massenpunktes
Eindimensionale Punktbewegung 1/10
Grundlegende Begriffe
Kinematik
Lehre von der geometrischen und analytischen Beschreibung der
Bewegungszustände von Körpern
Bewegung
Zeitliche Ortsänderung eines Körpers relativ zu einem Bezugssystem
Massenpunkt
Idealisierung eines realen Körpers, nach der die gesamte Masse des
Körpers in einem Punkt vereinigt ist
Prof. Dr. U. Zwiers
BTM2
3/23
Kinematik des Massenpunktes
Eindimensionale Punktbewegung 2/10
Grundlegende Begriffe (Forts.)
Bahnkuve
Ortsraumkurve, entlang der sich ein Massenpunkt bzw. der
Schwerpunkt eines Körpers bewegt
z
y
x
Prof. Dr. U. Zwiers
x
BTM2
4/23
Kinematik des Massenpunktes
Eindimensionale Punktbewegung 3/10
Grundlegende Begriffe (Forts.)
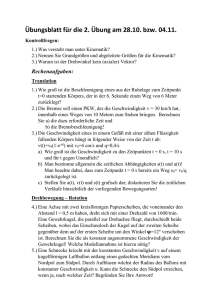
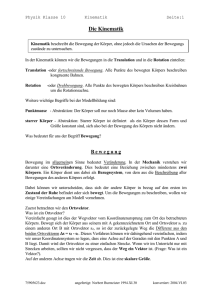
s-t-Diagramm
Grafische Darstellung des zurückgelegten Weges als Funktion der
Zeit: s = s(t)
s [m]
s [m]
∆s
∆s
∆t
∆t
∆s
∆s
∆t
∆t
t [s]
Gleichförmige Bewegung
Prof. Dr. U. Zwiers
t [s]
Ungleichförmige Bewegung
BTM2
5/23
Kinematik des Massenpunktes
Eindimensionale Punktbewegung 4/10
Grundlegende Begriffe (Forts.)
Durchschnittsgeschwindigkeit
∆s
v̄ =
∆t
s [m]
∆s
∆t
t [s]
Geschwindigkeit
Augenblicksgeschwindigkeit
s(t0 + ∆t) − s0
v(t0 ) = lim
∆t→0
∆t
|
{z
}
ds =
dt t=t0
Differentialquotient des Weges nach der Zeit: v =
Prof. Dr. U. Zwiers
BTM2
ds
dt
6/23
Kinematik des Massenpunktes
Eindimensionale Punktbewegung 5/10
Grundlegende Begriffe (Forts.)
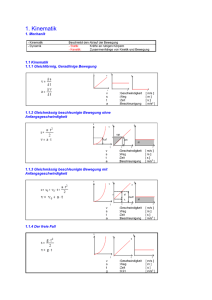
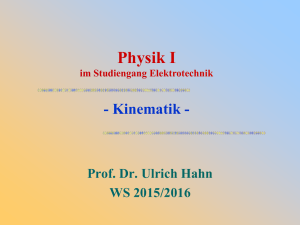
v-t-Diagramm
Grafische Darstellung der Geschwindigkeit eines bewegten Objekts
als Funktion der Zeit: v = v(t)
v
m
v
s
m
s
∆v
∆t
∆v
∆t
t [s]
Gleichförmige Bewegung
Prof. Dr. U. Zwiers
t [s]
Gleichmäßig beschleunigte
Bewegung
BTM2
7/23
Kinematik des Massenpunktes
Eindimensionale Punktbewegung 6/10
Grundlegende Begriffe (Forts.)
v
Durchschnittsbeschleunigung
∆v
ā =
∆t
m
s
∆v
∆t
t [s]
Beschleunigung
Augenblicksbeschleunigung
v(t0 + ∆t) − v0
a(t0 ) = lim
∆t→0
∆t
|
{z
}
dv =
dt t=t0
Differentialquotient der Geschwindigkeit nach der Zeit: a =
Prof. Dr. U. Zwiers
BTM2
dv
dt
8/23
Kinematik des Massenpunktes
Eindimensionale Punktbewegung 7/10
Grundaufgaben
Grundaufgabe der geradlinigen Bewegung
Berechnung der zwei verbleibenden Größen, wenn eine der vier
Größen t, s, v, a als Funktion einer der anderen Größen gegeben ist
Definitionsgleichungen
v=
Kombinationsmöglichkeiten
t
s
v
a
dv
ds
,a=
dt
dt
t
–
s(t)
v(t)
a(t)
s
t(s)
–
v(s)
a(s)
v
t(v)
s(v)
–
a(v)
a
t(a)
s(a)
v(a)
–
Es gibt insgesamt 12 Grundaufgaben!
Prof. Dr. U. Zwiers
BTM2
9/23
Kinematik des Massenpunktes
Eindimensionale Punktbewegung 8/10
Grundaufgaben (Forts.)
Ort, Geschwindigkeit oder Beschleunigung als Funktion
der Zeit: s(t), v(t) oder a(t)
Fall I:
s(t)
R
s(t)=s0 + v(t̄) dt̄
R
s(t)=s0 + v(t̄) dt̄
Prof. Dr. U. Zwiers
d
dt (·)
R
d
dt (·)
ds
v(t) = dt
d
dt (·)
(·)dt̄
v(t)
R
(·)dt̄
R
R
v(t)=v0 + a(t̄) dt̄
BTM2
d2 s
dv
a(t) = dt =
dt2
dv
a(t) = dt
(·)dt̄
a(t)
10/23
Kinematik des Massenpunktes
Eindimensionale Punktbewegung 9/10
Grundaufgaben (Forts.)
Geschwindigkeit als Funktion des Ortes: v(s)
Fall II:
t(s)=t0 +
R
d
ds
ds (·) dt
(·)ds̄
v(s)
ds̄
dv
a(s) =v ds
Beschleunigung als Funktion des Ortes: a(s)
Fall III:
t(s)=t0 +
1
v(s̄)
R
R
1
v(s̄)
R
ds̄
Prof. Dr. U. Zwiers
(·)ds̄
v(s)=
q
R
v02 +2 a(s̄) ds̄
BTM2
R
(·)ds̄
a(s)
11/23
Kinematik des Massenpunktes
Eindimensionale Punktbewegung 10/10
Grundaufgaben (Forts.)
Fall IV:
Beschleunigung als Funktion der Geschwindigkeit: a(v)
s(v)=s0 +
R
v̄
a(v̄)
dv̄
R
(·)
dv̄
a(v)
t(v)=t0 +
Prof. Dr. U. Zwiers
R
dv̄
R (·)
1
a(v̄)
dv̄
BTM2
12/23
Kinematik des Massenpunktes
Ebene Punktbewegung 1/9
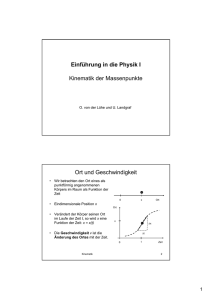
Ortsvektor
Gewähltes Bezugssystem
Rechthändiges kartesisches Koordinatensystem (raumfest)
Darstellungsmöglichkeiten
~rp (t) = xp (t)~ex + yp (t)~ey
~rp (t) =
xp (t)
yp (t)
y
yp
~ey
~rp
xp ~ex
Länge/ Betrag des Ortsvektors:
Prof. Dr. U. Zwiers
Bahnkurve
x
q
rp = |~rp | = x2p + yp2
BTM2
13/23
Kinematik des Massenpunktes
Ebene Punktbewegung 2/9
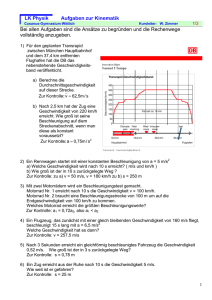
Geschwindigkeitsvektor
y
Punktbewegung von 1jnach 2j
Sehnenvektor: ∆r =
x2 − x1
y2 − y 1
y1
y2
~ey
Geschwindigkeit
– mittlere:
– aktuelle:
x −x
2
1
∆r t2 − t1
v̄ =
= y −y
2
1
∆t
t2 − t1
1 ∆~r
2
∆s
~r1
~r2
x1 ~ex
x2
x
dx
∆r
dr dt
v = lim
=
=
dy
∆t→0 ∆t
dt
dt
Prof. Dr. U. Zwiers
BTM2
14/23
Kinematik des Massenpunktes
Ebene Punktbewegung 3/9
Geschwindigkeitsvektor (Forts.)
Ortsvektor als Fkt. der Bogenlänge: r(t) = r(s(t))
⇒ v(t) =
Grenzwert des Vektorbetrags:
dr ds
dr
=
dt
ds dt
? Bahngeschwindigkeit
∆r dr = =1
lim
ds 2→1 ∆s dr
⇒ Tangenteneinheitsvektor: et =
ds
Der Geschwindigkeitsvektor liegt tangential zur Bahn und sein Betrag
ist gleich dem Betrag der Bahngeschwindigkeit: v = v et
Prof. Dr. U. Zwiers
BTM2
15/23
Kinematik des Massenpunktes
Ebene Punktbewegung 4/9
Beschleunigungsvektor
d2 x
d2 r dt2
dv
= 2 =
Komponenten-Schreibweise: a =
d2 y
dt
dt
dt2
det dv
Alternative Darstellung:
a=v
+
et
dt
dt
?
Bahn-/ Tangentialbeschleunigung
Tangentenvektor als Fkt. der Bogenlänge: et (t) = et (s(t))
⇒
Prof. Dr. U. Zwiers
BTM2
v
det
det
= v2
dt
ds
16/23
Kinematik des Massenpunktes
Ebene Punktbewegung 5/9
Beschleunigungsvektor (Forts.)
y
O
1
O
~et2
∆ϕ
̺
∆~et
~et1
Prof. Dr. U. Zwiers
̺′ Bahnkurve
~ey
1
|∆et | ≈ 1 · ∆ϕ
Grenzübergang:
∆ϕ
|∆s| ≈ ̺′ · ∆ϕ
′
∆s
~et1
~ex
~et2
2
Krümmungsradius
x
∆et det 1
=
=
lim
2→1 ∆s ds ̺
Orientierung in Richtung
der Bahnnormalen
BTM2
17/23
Kinematik des Massenpunktes
Ebene Punktbewegung 6/9
Beschleunigungsvektor (Forts.)
Darstellung in kartesischen und natürlichen Koordinaten
y
y
P ~ax
P
~an
O
O
~ey
~et
~en
~a
~a
~at
~ay
~ex
a = ax + ay
Prof. Dr. U. Zwiers
x
x
a = an + at =
BTM2
dv
v2
en + et
̺
dt
18/23
Kinematik des Massenpunktes
Ebene Punktbewegung 7/9
Bewegung auf kreisförmiger Bahn
y
Bogenlänge (r = const)
s(t) = rϕ(t)
Bahngeschwindigkeit
v(t) = rϕ̇
~et
P
~en
Tangentialbeschleunigung at (t) = rϕ̈
Normalbeschleunigung
Prof. Dr. U. Zwiers
an (t) =
~r
v 2 (t)
r
s
ϕ
O
x
Winkelgeschwindigkeit: ω =
dϕ
= ϕ̇
dt
Winkelbeschleunigung: α =
d2 ϕ
= ϕ̈
dt2
BTM2
19/23
z
Kinematik des Massenpunktes
Ebene Punktbewegung 8/9
Bewegung auf kreisförmiger Bahn (Forts.)
ω
~
cos ϕ
Position
r=r
sin ϕ
ϕ
− sin ϕ
Geschwindigkeit v = rω
x
cos ϕ
− sin ϕ
− cos ϕ
2
Beschleunigung a = rα
+ rω
cos ϕ
− sin ϕ
| {z }
| {z }
et
en
~v
~r
y
Winkelgeschwindigkeitsvektor
Vektor, dessen Betrag der Winkelgeschwindigkeit entspricht
und der parallel zur Drehachse und senkrecht zu Bahnebene
gerichtet ist, so dass gilt: v = ω × r
Prof. Dr. U. Zwiers
BTM2
20/23
Kinematik des Massenpunktes
Ebene Punktbewegung 9/9
Darstellung in Polarkoordinaten
y
Kartesische Koordinaten x, y
~aϕ ~a
~vϕ
Polarkoordinaten r, ϕ
Basisvektoren
er =
eϕ =
cos ϕ
sin ϕ
~ar
− sin ϕ
cos ϕ
~v
~vr
~r
~eϕ
~er
ϕ
x
Position
r = r er
Geschwindigkeit v = ṙ er + rϕ̇ eϕ
Beschleunigung a = (r̈ − rϕ̇2 ) er + (rϕ̈ + 2ṙϕ̇) eϕ
Prof. Dr. U. Zwiers
BTM2
21/23
Kinematik des Massenpunktes
~eb
Räumliche Punktbewegung 1/2
~et
Frenet-Serret-Gleichungen
~en
~r
Raumkurve mit natürlichem Koordinatensystem
Tangenteneinheitsvektor
Normaleneinheitsvektor
Binormaleneinheitsvektor
det
= κ en
ds
den
= τ eb − κ et
ds
deb
= −τ en
ds
Prof. Dr. U. Zwiers
dr
ds
1 det
en =
κ ds
z
et =
x
y
eb = et × en
det Krümmung κ = ds deb Torsion
τ =
ds BTM2
22/23
Kinematik des Massenpunktes
Räumliche Punktbewegung 2/2
Darstellung in Zylinderkoordinaten
P
Kartesische Koordinaten x, y, z
Zylinderkoordinaten ρ, ϕ, z
cos ϕ
0
Basisvektoren eρ = sin ϕ , ez = 0 z
0
1
− sin ϕ
eϕ = cos ϕ
0
Position
r = ρ eρ + z ez
~r
z
~ez
~eϕ
ϕ
x
~eρ
y
ρ
Geschwindigkeit v = ρ̇ eρ + ρϕ̇ eϕ + ż ez
Beschleunigung a = (ρ̈ − ρϕ̇2 ) eρ + (ρϕ̈ + 2ρ̇ϕ̇) eϕ + z̈ ez
Prof. Dr. U. Zwiers
BTM2
23/23