Relativbewegungen
Werbung

Ergänzungen zu Physik I
Relativbewegungen
Relativbewegungen
Bei der Diskussion der Newtonschen Prinzipien wurde betont, dass diese nur in einem Inertialsystem
gültig sind. Nach dem 1. Newtonschen Prinzip ist das ein solches Koordinatensystem, in dem ein isolierter, also keinen Kräften unterworfener Massenpunkt sich mit konstanter Geschwindigkeit bewegt.1 Als
Inertialsystem haben wir meist ein auf der Erdoberfläche verankertes Koordinatensystem benutzt2 . Die
mit der Newtonschen Mechanik berechneten Bewegungen stimmten ausgezeichnet mit den Messungen
überein.
Es stellen sich dann die Fragen: Wie kann man verschiedene Inertialsysteme unterscheiden? Wie lauten
die Bewegungsgleichungen in Nicht-Inertialsystemen? Insbesondere die Beantwortung der zweiten Frage
ist von grosser praktischer Bedeutung, da wir sehen werden, dass Rechnungen oft vereinfacht werden
können, wenn man sie in einem beschleunigten Nicht-Inertialsystem ausführt.
1. Relativitätsprinzip der Mechanik
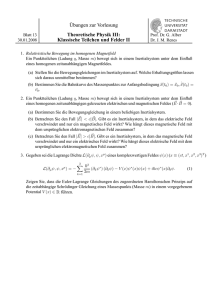
Ein Koordinatensystem können wir uns immer durch Vektoren in einem starren Körper realisiert denken.
In einem solchen Körper bleiben per definitionem die Abstände beliebiger Punktepaare konstant. Wir
betrachten zwei Systeme dieser Art, das S-System (z.B. Laborsystem) mit den xyz-Achsen und das
relative Sr -System mit den xr yr zr -Achsen (Abb. Seite 2). Der Ort eines Massenpunktes m wird durch
die Ortsvektoren ~r und ~rr festgelegt.
Dann gilt
~r = ~r◦ + ~rr .
(1)
Wir setzen voraus, dass in beiden Systemen die klassische, nicht-relativistische Mechanik gilt, d.h. alle
Geschwindigkeiten sind klein gegenüber der Lichtgeschwindigkeit (v c). Dann gelten bis zu einer hohen
Genauigkeit die klassischen Vorstellungen von Raum, Zeit und Masse:
a) In beiden Systemen werden die gleichen Massstäbe zur Längenmessung verwendet. Das impliziert,
dass die Standard-Massstäbe von S und Sr verglichen werden können.
b) Beide Systeme benutzen die gleiche Zeit. Wenn in S eine Zeit ∆t zwischen zwei Ereignissen beobachtet wird, so wird in Sr das gleiche Intevall ∆tr = ∆t gemesen.
c) Der Massenpunkt hat in beiden Systemen die gleiche Masse.
In der Relativitätstheorie sind diese drei Annahmen nicht mehr haltbar, sobald die Geschwindigkeiten
der Grösse nach mit c vergleichbar werden.
Wir wollen nun annehmen, durch Versuche habe sich erwiesen, dass S ein Inertialsystem sei. Dann lässt
sich sofort zeigen, dass auch Sr ein Inertialsystem ist, falls es sich gleichförmig geradlinig gegenüber S
bewegt, d.h. wenn gilt
d~r◦
= ~v◦ = konst.
(2)
dt
Denn zweimalige Differenziation von Gl.(1) liefert
d~r
d~r◦
d~rr
= ~v =
+
= ~v◦ + ~vr
dt
dt
dt
und
d2~r
d2~rr
=
~
a
=
= ~ar .
dt2
dt2
Aus ~a = ~ar folgt aber, dass die Kräfte F~ = m~a und F~r = m~ar in beiden Systemen die gleichen sind;
demzufolge gilt auch in Sr die Newtonsche Mechanik, Sr ist auch ein Inertialsystem. Alle Koordinatensysteme, die sich gleichförmig geradlinig gegenüber einem Inertialsystem bewegen, sind also ebenfalls
Inertialsysteme. Sie lassen sich nicht unterscheiden, und es ist daher unmöglich festzustellen, ob eines
dieser Systeme “absolut in Ruhe” ist. Dies ist das Relativitätsprinzip der Mechanik.
1 Vgl.
Halliday, Kap. 5-3.
dabei die Rotation der Erde als kleinen Effekt vernachlässigt. Ein Labor auf der Erde ist bei genauer Messung jedoch
ein beschleunigtes Nicht-Inertialsystem mit den entsprechenden Schein- oder Trägheitskräften.
2 und
1
Ergänzungen zu Physik I
Relativbewegungen
Wenn Gl. (2) gilt, so lässt sich Gl. (1) auch in der Form der Galilei-Transformation
~r = ~rr + ~v◦ t
(3)
schreiben. Wenn diese Transformationsgleichung zwischen den Systemen S und Sr gültig ist, gilt das
Relativitätsprinzip der Mechanik, das man auch in folgenden Worten formulieren kann:
Es ist einem Beobachter unmöglich, mit Hilfe von mechanischen Experimenten herauszufinden, ob sein Bezugssystem in Ruhe oder in gleichförmiger Bewegung ist.
Mittels anderer Wechselwirkungen wie z.B. elektrodynamischen oder optischen Versuchen ist eine solche
Unterscheidung ebensowenig möglich.
2. Die Kinematik in einem bewegten Bezugssystem
Wir behandeln jetzt eine beliebige Bewegung (auch Rotationen und damit beschleunigte Systeme) des
Systems Sr gegenüber dem Inertialsystem S (im Folgenden Ruhe- oder Laborsystem genannt. Ein ausgedehnter Körper mit einer allgemeinen Bewegung hat sechs Freiheitsgrade, 3 der Translation und 3 der
Rotation. Es gelte wie oben die klassische Mechanik.
zr 6 ~
Das bewegte Bezugssystem sei ein starrer Raum Sr (xr , yr , zr ) (Fahrzeug), der z 6
m ω
u
vom ruhenden System S(x, y, z) aus beschrieben wird mit ~r◦ , ~v◦ (Ortsvektor
Sr
~r
1y
und Geschwindigkeit des Ursprungs von Sr ) und ω
~ (Winkelgeschwindigkeit
7 r ~r r
von Sr um eine Achse durch den Ursprung von Sr ). Im relativen System
xr
Sr (xr , yr , zr ) wird eine Masse m mit ~rr , ~vr und ~ar gekennzeichnet. Im ruhen~r◦
1
den System beschreiben ~r, ~v und ~a die Masse m. Für eine reine Translation
y
von Sr gilt: ~v = ~v◦ . Für eine reine Rotation von Sr gilt für einen Massen- S punkt: ~v = ω
~ × ~rr .
x
Der Koordinatenursprung von Sr liegt auf der Drehachse. Die Winkelgeschwindigkeit ist (im Gegensatz
~ ◦ und dem Drehmoment ~τ◦ ) unabhängig von der Wahl des Bezugspunktes.
zum Drehimpuls L
Beweis: P◦ und Ṕ◦ seien zwei beliebige Bezugspunkte mit relativem Verbindungsvektor ~s.
Die Führungsgeschwindigkeit des Fahrzeuges ist
zr
Sr
~
rr
P◦
ω
~
m 6
~vF = ~v◦ + ω
~ × ~rr bzw. ~vF = ~v´◦ + ω
~´ × ~r´r ; weiter ist ~v´◦ = ~v◦ + ω
~ × ~s; ~r´r = ~rr − ~s
t ´
~
r
I
@
Ṕ
◦
@p~s
:
- ⇒ ~vF = ~v◦ + ω
~ × ~rr = ~v◦ + ω
~ × ~s + ω
~´ × ~rr − ω
~´ × ~s ⇒ (~
ω−ω
~´ ) × ~rr = (~
ω−ω
~´ ) × ~s.
xr
Diese Vektorgleichung kann nur dann für alle ~rr erfüllt werden, wenn ω
~ =ω
~´ gilt, qed.
Für eine allgemeine Bewegung des Fahrzeuges ist die Geschwindigkeit eines beliebigen Punktes beschrieben durch die Addition3 der beiden oben angegebenen Terme für reine Translation bzw. Rotation:
~vF = ~v◦ + ω
~ × ~rr . Mit der absoluten Zeit4 t = tr und unter Beachtung der Tatsache, dass infolge
der Drehung dr ~rr 6= d~rr ist5 , gilt in den beiden Systemen für den Ortsvektor, die Geschwindigkeit und
dt
dt
den Beschleunigungsvektor eines Punktes:
3 Beachte,
dass ~vF , ~v◦ und ω
~ ×~
rr alle drei normale polare Vektoren sind, die addiert werden können. Axiale Vektoren wie
ω
~ können nicht so einfach addiert werden.
4 Dies gilt nur für v c; sonst muss die Relativitätstheorie bemüht werden.
rr
5 d~
differenziert im ruhenden und drdt~rr im bewegten System. Wegen der relativen Bewegung und der Drehung können
dt
diese beiden Ableitungen nicht identisch sein – wir müssen eine Beziehung zwischen beiden suchen.
2
Ergänzungen zu Physik I
Relativbewegungen
S(x, y, z)
~r(t) = ~r◦ + ~rr
~v = d~r
dt
2
d~
v
~a =
= d ~2r
dt
dt
Relativbewegung
~rr (tr ) = ~rr (t)
~vr = dr ~rr = dr ~rr
dtr
dt
d2r ~rr
d
~
v
r
r
~ar =
=
dt
dt2
nur Führungsgeschwindigkeit
m mit Fahrzeug verbunden
~vF = ~v◦ + ω
~ × ~rr
d~
v
F
~aF =
dt ~vr =0
~rr = konst
Ort:
Geschwindigkeit:
Beschleuigung:
Spezialfall:
Sr (xr , yr , zr )
~vr = ~ar = 0
Gefragt wird nach den Beziehungen zwischen den beiden Systemen. Für den allgemeinen Fall mit der
Masse m und ~vr 6= 0 gilt:
dr ~rr
d
d~rr
= (~r◦ + ~rr ) = ~v◦ +
dt
dt
dt
::::::::::::::::::
::::::::
~v = ~vF + ~vr = ~v◦ + ω
~ × ~rr + ~vr = ~v◦ + ω
~ × ~rr +
(4)
Mit diesen beiden Gleichungen kann die gesuchte Beziehung d = dr + ω
~×
dt
dt
als Transformation vom System S in das System Sr z.B. für ~rr aufgestellt werden:
dr ~rr
d~rr
=
+ω
~ × ~rr ,
dt
dt
~
~
dA
dr A
~
=
+ω
~ ×A
dt
dt
~:
und mit allgemeinem Vektor A
(5)
Anschaulich fehlt in Sr die Drehbewegung ω
~ × ~rr . Für die Beschleunigungen gilt:
• Absolutbeschleunigung: ~a =
d~
v
dt
=
dr ~
vr
dt
d2 ~
r
dt
d2 ~
r
r r
= dt
2
vF • Führungsbeschleunigung: ~aF = d~dt
dr ~rr
• Relativbeschleunigung: ~ar =
dt
=~
vr =0
Mit den Gleichungen (4) kann ein Zusammenhang zwischen den Beschleunigungen gefunden werden:
d~
ω
dr ω
~
dr ω
~
d~v
d~v◦
d
d dr ~rr
Es ist
=
+ω
~ ×ω
~ =
und ~a =
=
+ (~
ω × ~rr ) +
.
| {z }
dt
dt
dt
dt
dt
dt
dt
dt
:::
::::
=0
Wende den Operator
⇒
d
dr ~rr
d
von Gl.(5) auf
an:
dt
dt
dt
~a =
und mit Gl.(5) ist ~a =
dr ~rr
dt
=
dr
dt
dr ~rr
dt
+ω
~×
dr ~rr
dt
d~
ω
d~rr
d2~rr
d~v◦
dr ~rr
+
× ~rr + ω
~×
+ r2 +ω
,
~×
dt
dt
dt
dt
dt
d~v◦
d~
ω
dr ~rr
d2~rr
dr ~rr
+
× ~rr + ω
~×
+ω
~ × (~
ω × ~rr ) + r 2 + ω
~×
dt
dt
dt
dt
dt
d~v◦
d~
ω
dr ~rr d2r ~rr
+
× ~rr + ω
~ × (~
ω × ~rr ) + 2 · ω
~×
+ 2
dt
|dt
{z
} |
{z dt } |dt
{z }
~a =
+
+ ~ar .
~aF
~aC
d~vF d
Denn ~aF kann identifiziert werden zu ~aF =
=
[~
v
+
ω
~
×
~
r
]
=
◦
r
dt ~vr = drdt~rr =0
dt
~
vr =0
~a =
(6)
3
Ergänzungen zu Physik I
d~v◦
d~
ω
d~rr
~aF =
+
× ~rr + ω
~×
dt
dt
dt
ergibt sich für ~vr =
Relativbewegungen
~
vr =0
d~v◦
d~
ω
dr ~rr
=
+
× ~rr + ω
~×
+ω
~ × (~
ω × ~rr )
dt
dt
dt
und damit
~
vr =0
d~v◦
d~
ω
dr ~rr
= 0 : ~aF =
+
× ~rr + ω
~ × (~
ω × ~rr ) – wie in Gl.(6) bereits benannt.
dt
dt
dt
(7)
Also: ~a = ~aF + ~ar + 2 · ω
~ × ~vr = ~aF + ~ar + ~aC , wobei
(8)
~aC := 2 · ω
~ × ~vr Coriolisbeschleunigung genannt wird.
(9)
Eine Coriolisbeschleunigung ~aC tritt nur dann auf, wenn das bewegte System eine Drehung ω
~ ausführt
und der Massenpunkt eine Relativgeschwindigkeit ~vr 6= 0 hat sowie ~vr nicht parallel zu ω
~ liegt. ~ar ist die
Relativbeschleunigung und ~aF die Führungsbeschleunigung.
3. Die Dynamik in einem bewegten Bezugssystem
Das Aktionsprinzip der Bewegung eines Körpers mit Masse m im System S ist
m~a =
n
X
F~i = F~
mit F~ gleich den resultierenden äusseren Kräften. Dann gilt auch (mit Gl.(8)):
i=1
m~a = m(~ar + ~aF + ~aC ) = F~ .
Ein in Sr mitbewegter Beobachter registriert nur die Relativbeschleunigung ~ar und findet deshalb für
~ sowie −m~aC = −2 · m(~
das Aktionsprinzip m~ar = F~ − m~aF − m~aC bzw. (mit −m~aF =: Z
ω × ~vr ) =
~
2 · m(~vr × ω
~ ) =: C)
~ +C
~
m~ar = F~ + Z
(Aktionsprinzip im bewegten System).
(10)
~ (die Führungskraft, in der die Zentrifugalkraft −m~
~ (die Corioliskraft)
Z
ω × (~
ω × ~rr ) enthalten ist) und C
haben die Dimension einer Kraft; sie sind jedoch in S keine wahrhaft existierenden Kräfte, sondern Scheinoder Trägheitskräfte, die ein bewegter Beobachter als Korrektur in die Newtonsche Bewegungsgleichung
einführen muss, wenn er dort an Stelle der Beschleunigung ~a die Relativbeschleunigung ~ar einsetzt.
Sie haben keine Reaktionskräfte. Obwohl sie nur Schein- oder Trägheitskräfte sind, existieren sie als
reale Kraft im bewegten System Sr . Ein beschleunigtes Bezugssystem ist kein in sich abgeschlossenes
Inertialsystem, es müssen von aussen Kräfte wirken, um das System mit Massen zu beschleunigen.
4. Beispiele und Spezialfälle für bewegte Systeme
4.1. Gleichförmig bewegtes System Sr
Es ist ~vF = ~v◦ = konst, folglich ~aF = ~aC = 0 und somit ~ar = ~a. Dann ist auch Sr ein Inertialsystem, wie
wir schon in Abschnitt 1 diskutiert haben.
4.2. Rein translatorisch beschleunigtes System Sr
~ = 0 und damit m~ar = F~ +
In einem rein translatorisch beschleunigten Bezugssystem gilt ω
~ = 0, C
d~
v◦
~
~
Z = F − m~aF . Mit ~vF = ~v◦ (t) folgt ~aF = dt = ~a◦ . Damit spürt z.B. der Insasse eines mit ~a◦
beschleunigten Fahrzeuges die Kraft m~ar = F~ − m~a◦ . Wenn die auf ihn wirkende Kraft F~ = 0 ist, erfährt
er die beschleunigende Trägheitskraft m~ar = −m~a◦ . S und Sr sind nicht mehr äquivalent, in den beiden
Systemen werden unterschiedliche Beschleunigungen gemessen.
4
Ergänzungen zu Physik I
Relativbewegungen
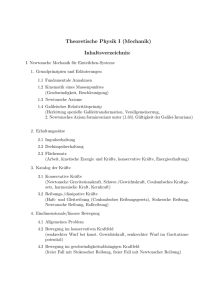
Beispiel: Mathematisches Pendel auf einer vertikal beschleunigten Plattform
z
6
A
A
ϕA `
K
A
AA F ∗
Au
A
?
G
~ = −m~a◦ = −ma◦~k und damit die Bewegungsgleichung für
Es ist Z
die Tangentialkomponente
d2r ϕ
= −(mg + ma◦ ) sin ϕ.
dt2
a◦
6
Für kleine Ausschläge ist sin ϕ ' ϕ, also
Z
?
g + a◦
d2r ϕ
+
ϕ = 0. Mit dem Ansatz
dt2
`
xr
g + a◦
ϕ(t) = ϕ◦ cos(Ωt − δ) ist Ω =
die Kreisfrequenz des Pendels.
`
Fällt die Plattform frei, so ist g = −a◦ , also Ω = 0, d.h. die Schwingungsdauer T = 2π
ist unendlich.
Ω
Der freie Fall merkt keine Gravitationskraft.
m`
4.3. Gleichförmig rotierendes System Sr
Die translatorische Bewegung verschwindet. Wir behandeln zwei Experimente auf dem Drehtisch.
a) Ein Massenpunkt m sei auf einer mit konstanter Winkelgeschwindigkeit ω
~ sich drehenden, horizontalen Unterlage durch eine Feder mit der Drehachse verbunden. m sei relativ zur Unterlage in
Ruhe. Es herrscht scheinbares Gleichgewicht. Im ruhenden System beschreibt m eine Kreisbahn.
Die wahren Kräfte sind, wenn keine Reibungen vorhanden sind,
v2
= mrr ω 2 .
r
Ein mitbewegter Beobachter muss eine Scheinkraft einzuführen,
um sich die relative Ruhe erklären zu können. Es ist
G=N
6
ω
~
~rr
~
N
-6
∼∼∼∼∼ u - Z
~
F~F ?
~
G
und
~vF = ω
~ × ~rr ,
sowie ~v˙ ◦ = 0 und
aus Gl.(7) zu
d~
ω
dt
FF = m
~vr = 0,
~ =0
also C
= 0. Damit ergibt sich die Führungskraft
~ = −m~aF = −m[~
Z
ω × (~
ω × ~rr )] , der Zentrifugalkraft6 . Ihr Betrag ist gerade Z = mrr ω 2 (da ω
~
~
~
⊥ ~rr steht). Z und FF erfüllen also die Gleichgewichtsbedingung im beschleunigten Relativsystem.
b) Vom Ursprung des ruhenden Systems S aus bewegt sich eine Masse m mit konstanter Geschwindigkeit v◦ , es wirken keine äusseren Kräfte. Der Beobachter in Sr sieht eine spiralförmig nach aussen
bewegte Masse, für welche die Geschwindigkeit direkt angegeben werden kann; in Polarkoordinaten
hat sie die Komponenten vrr = drdtrr = v◦ und vrϕ = rr drdtϕr = −ωrr . Nach einer einfachen Integration erhält man hieraus auch die Ortskoordinaten rr = v◦ t und ϕr = −ωt. Gemäss Gl.(10) gilt für
den Beobachter das Aktionsprinzip
~ +C
~ = −m~aF − m~aC = −m · ω
m~ar = Z
~ × (~
ω × ~rr ) − 2m · ω
~ × ~vr ,
d.h. er beobachtet eine Zentrifugalkraft und eine Corioliskraft. Letztere sucht die Richtung der
Geschwindigkeit dauernd zu ändern ohne den Betrag zu beeinflussen, wie dies auf der Erde bei den
Monsunen, Passatwinden und dem Golfstrom ebenfalls beobachtet wird. Versucht der Beobachter
~ +C
~ aufbringen.
in Sr die Masse festzuhalten, so muss er eine Reaktionskraft zu Z
6 Zur
Zentrifugalkraft: vgl. Formel (6-35) im Halliday, Kap.6-5.
5
Ergänzungen zu Physik I
Relativbewegungen
5. Trägheitseffekte auf der Erde
In den vorausgegangenen Beispielen spielte der Hörsaal und damit die Erde die Rolle des ruhenden Systems. Diese Wahl führte zu keinen Widersprüchen mit der Erfahrung, obwohl die Erde ein bewegtes
Bezugssystem ist. Der Grund liegt darin, dass auf der Erde Z und C viel kleiner als mg sind. Es können
aber terrestrische Versuche ausgeführt werden, die eindeutig die Trägheitseffekte als Folge des Bewegungszustandes der Erde zeigen.
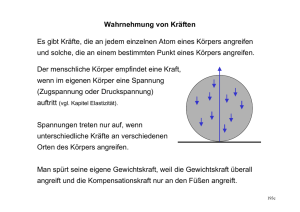
Ein Beispiel: Nachweis der Erdrotation mit dem Foucaultpendel
N
A
m
t
A
t
`
Ein schwingendes Pendel behält infolge der Trägheit seine Schwingungsebene im Raum bei. Dieses eigentümliche Verhalten offenbart
sich beim Foucault-Versuch7 (1850/51 in Paris). Ein Ort auf der Erde
mit der geographischen Breite β rotiert mit der Winkelgeschwindigkeit ω · sin β um eine zur Erdoberfläche senkrechte Achse; mit dieser
Winkelgeschwindigkeit dreht sich die Erde unter dem schwingenden
Pendel hinweg. Die effektive Umlaufszeit der Horizontalebene relativ
zur Schwingungsebene des Pendels in der geographischen Breite β
ist T = 2π/ω sin β mit ω = 2π/24 Stunden. Zur Berechnung wurde
hier ω
~ bei der geographischen Breite β in die Komponenten senkrecht
(ω⊥ ) und parallel (ωk ) zur Erdoberfläche zerlegt.8
S
Die Pendelebene bleibt bei der Drehung im Raum S erhalten, es gilt die Drehimpulserhaltung und die
~ = 2m(~vr ×~
Drehung ist direkt durch ω⊥ gegeben. Es gilt für die Corioliskraft C
ω ) = 2m(~vr ×ω⊥ +~vr ×ωk ),
wobei nur der erste Term zu einer Auslenkung führt. Für Zürich mit β ≈ 47◦ ist T = 34h, am Pol erhalten
wir T = 24h und am Äquator T = ∞.
7 Für
8 Dies
eine ausführlichere Darlegung siehe Halliday, Kap.16-10.
ist nur deshalb möglich, weil es sich bei ω
~ um einen axialen Vektor handelt.
6