3. Cartesische Geometrie I: Punkte, Strecken und Dreiecke. Punkte
Werbung

3. Cartesische Geometrie I: Punkte, Strecken und Dreiecke.
Existiert eine widerspruchsfreie Euklidische Geometrie? Um dies zu zeigen müsste man
ein widerspruchsfreies Modell angeben in dem alle Hilbertschen Axiome gelten.
Ein solches Modell ist durch die kartesische Geometrie gegeben. Diese Geometrie geht auf
Descartes zurück. Die Geometrie von Descartes ist nicht - wie die Geometrie von Hilbert axiomatisch aufgebaut. Sie ist vielmehr als eine Methode gedacht, um geometrische Sätze
zu finden und zu beweisen. Insbesondere ist diese Geometrie nicht eingeschränkt auf die
ausschließliche Benutzung von Zirkel und Lineal. Während Hilbert die Geometrie letztlich
auf Logik reduzieren möchte, war das Ziel von Descartes die Geometrie mit dem Rechnen,
also letztlich mit Arithmetik und Algebra zu verbinden. Damit wurde die Geometrie mit
der Existenz der reellen Zahlen verbunden. Die Frage nach der Widerspruchsfreiheit der
Geometrie ist insbesondere auf die Frage der Widerspruchsfreiheit der Theorie der reellen
Zahlen reduziert.
Punkte, Strecken und Dreiecke.
In der kartesischen Geometrie ist der Raum definiert als drei-dimensionaler Vektorraum.
Definition. Ein Vektorraum (oder genauer: ein R-Vektorraum) ist eine Menge
zusammen mit zwei Abbildungen (Verknüpfungen)
+:V ×V →V
V
·:R×V →V
(v, w) 7→ v + w
(a, w) 7→ a · v
so dass die folgenden zwei Blöcke von Identitäten gelten:
(u + v) + w = (u + v) + w,
u + v = v + u,
0 + v = v,
a · (u + v) = a · u + a · v,
(a + b) · v = a · v + b · v,
(ab) · v = a(b · v),
1 · u = u und 0 · u = 0
für ein 0 ∈ V und alle a, b ∈ R und alle u, v, w ∈ X.
Beispiel. Die Menge
R3 = {[x, y, z, ] | x, y, z ∈ R }
zusammen mit der folgenden Addition und Skalarprodukt:
[x1 , y1 , z1 ] + [x2 , y2 , z2 ] := [x1 + x2 , y1 + y2 , z1 + z2 ] und a[x, y, z] = [ax, ay, az]
Klaus Johannson, Geometrie
18
3. Geometrie
ist eine Vektorraum. Er heißt der 3-dimensionale Koordinatenraum.
Definition. (Geometrische Basisobjekte) Die Basisobjekte der kartesischen Geometrie sind die folgenden:
(1) Die Punkte der kartesischen Geometrie sind die Elemente des 3-dimensionalen Koordinatenraumes:
P := V = R3 = { [x, y, z] | x, y, z ∈ R }.
(2) Eine Gerade ist jede Teilmenge
g := {[x(t), y(t), z(t)] = [x1 , y1 , z1 ] + t[x2 , y2 , z2 ] | t ∈ R } ⊂ R3 ,
wobei [x1 , y1 , z1 ], [x2 , y2 , z2 ] ∈ R3 irgend zwei Punkte sind. Man nennt g auch genauer
eine Gerade durch die zwei Punkte [xi , yi , zi ], i = 1, 2.
(3) Eine Ebene ist jede Teilmenge
α := {[x(s, t), y(s, t), z(s, t)] = [x1 , y1 , z1 ] + s[x2 , y2 , z2 ] + t[x3 , y3 , z3 ] | s, t ∈ R } ⊂ R3 ,
wobei [xi , yi , zi ] ∈ R3 , i = 1, 2, 3, irgend drei Punkte sind. Man nennt α auch genauer
die Ebene durch die drei Punkte [xi , yi , zi ], i = 1, 2, 3.
Bemerkung. Im allgemeinen sind geometrische Objekte der kartesischen Geometrie
gewisse Punktmengen von R3 , die gesondert definiert werden.
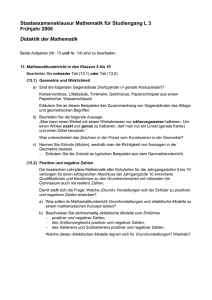
Geometrische Interpretationen. Geometrische Objekte lassen sich anschaulich interpretieren. Diese Interpretation ist aber nicht Teil ihrer Definition. Für diese Interpretation
stellt man sich den anschaulichen Raum versehen vor mit einem einmal gegebenen ”Koordinatensystem”.
y
( x, y ) = ( 3, 2 )
2
2
x
3
3
Vom Koordinatensystem
Mit Hilfe dieses Koordinatensystems kann man jeden Punkt P im anschaulichen Raum mit
dem Koordinatentripel [x, y, z] identifizieren, das seine Position angibt, und umgekehrt.
Mit Hilfe dieser Identifikation kann man nun weiter auch die Addition und das Produkt
mit Skalaren anschaulich interpretieren. Hierzu ist es hilfreich die Punkte P als Pfeile
Klaus Johannson, Geometrie
§4 Cartesische Geometrie I
19
anzusehen mit Anfangspunkt im Koordinatenursprung und Endpunkt in P . Solche Pfeile
werden auch oft ”Vektoren” oder ”Ortsvektoren” genannt.
Zwei Ortsvektoren
Ein Richtungsvektor
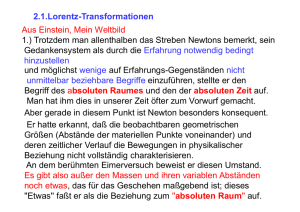
Die Vektor-Addition lässt sich mit Ortsvektoren mit Hilfe der folgenden Paralellogrammregel veranschaulichen.
w
w
v+w
v+w
v
v
Triangle Gesetz
Parallelogramm Gesetz
Insbesondere lässt sich dann die Differenz von zwei Vektoren wie folgt illustrieren:
a-b
b
a
Die Differenz von zwei Vektoren
Solche Veranschaulichungen sind gelegentlich nützlich. Sie sind insbesondere hilfreich, um
Eigneschaften von geometrischen Objekten zu entdecken. Grundlage der karteischen Beweise sind aber Rechnungen. Die kartesische Geometrie ist eine Reduktion von Geometrie
auf das Rechnen mit reellen Zahlen. Vom karteischen Paradigma aus können demnach
die obigen Veranschaulichungen nicht Teil von eigentlichen Beweisen sein. Es ist weiter
wichtig hervorzuheben, dass im folgenden ein Punkt entweder mit großen Buchstaben
A, B, C, . . .
Klaus Johannson, Geometrie
20
3. Geometrie
oder mit kleinen Buchstaben
u, v, w, . . .
bezeichnen werden, je nachdem ob wir die Interpretation als Punkt oder als Pfeil hervorheben möchte. In diesem Sinne können die folgenden Bezeichnungen auftreten:
A + B, aB, bzw. u + v, av.
Messen von Strecken und Winkeln.
Nachdem wir erste geometrische Objekte der kartesischen Geometrie definiert haben, geht
es nun darum die Relationen x ⊲⊳ y, x < y > z, x ≡ y der Hilbertschen Axiomatik zu
definieren.
Definition. (Inzidenzrelation) Seien x, y
Geometrie) Dann definiert man
x ⊲⊳ y
geometrische Objekte (der kartesischen
⇔ x ⊂ y oder y ⊂ x
d.h. wenn eines Teilmenge des anderen Objekts ist.
Definition. (Zwischenrelation) Sei r = r0 + tv eine Gerade und seien
ri = r0 + ti v, i = 1, 2, 3
drei Punkte auf dieser Geraden. Dann definiere
r1 < r2 > r3 ⇔ t1 < t2 < t3 .
Bemerkung. Die Kongruenz von Strecken und Winkeln wird in der kartesischen Geometrie über geeignete Maße, nämlich über Maße für den Abstand und den Winkel. Wir
definieren diese Begriffe etwas allgemeiner als hier nötig, aber die etwas größere Allgemeineheit wird uns später dienlich sein. Wir werden aber gleich sehen, dass diese allgemeine
Begriffsbildung ihre gemeinsame Grundlage im Skalarprodukt hat.
Definition. Eine Metrik auf einer Menge V ist eine Abbildung
d:V ×V →R
mit
(1) d(A, B) ≥ 0 und d(A, B) = 0, falls A = B.
(2) d(A, B) = d(B, A)
(3) d(A, C) ≤ d(A, B) + d(B, C).
Klaus Johannson, Geometrie
§4 Cartesische Geometrie I
21
Definition. Ein Winkelmaß ist eine Abbildung w : V × V → R mit
(1) w(αA, B) = w(A, B),
(2) w(A, B) = −w(B, A), und
(3) w(A, B) + w(B, C) = w(A, C).
In der kartesischen Geometrie definiert man sowohl eine Metrik als auch ein Winkelmaß
über das Skalarprodukt wie folgt:
Definition. Das Skalarprodukt v · w zweier Vektoren v = [x1 , y1 , z1 ], w = [x2 , y2 , z2 ]
ist definiert durch
v · w := x1 y1 + x2 y2 + x3 y3 .
Definition. Die Euklidische Metrik ist die Abbildung
d:V ×V →R
definiert durch
d(v, w) =
p
(v − w) · (v − w)
Der Euklidische Winkel ist die Abbildung
w :V ×V →R
definiert durch
w(v, w) = arccos
v·w
d(v, 0)d(w, 0)
Bemerkung. Man bezeichnet
k v k= d(v, 0) =
√
v·v
Satz. Die wie oben definierte Euklidische Metrik und Euklidische Winkelmessung
d : R3 × R3 → R
und
w : R3 × R 3 → R
ist eine Metrik und ein Winkelmaß.
Beweis. Es ist ziemlich leicht nachzurechnen, dass die Euklidische Metrik alle Eigenschaften einer Metrik hat. Der entsprechende Beweis für das Euklidische Winkelmaß ist
schon schwerer, da er Eigenschaften der Arcuscosinus-Funktion ausnutzt, die wir noch
nicht hergeleitet haben. Dies wird hier nicht ausgeführt (es ist Sache der Analysis). ♦
Mit Hilfe der obigen Masse kann man ”Kongruenz” definieren.
Klaus Johannson, Geometrie
22
3. Geometrie
Definition. (Kongruenz von Strecken) Seien AB und CD zwei Strecken. Dann
definiert man
AB ≡ CD ⇔ d(A, B) = d(C, D)
Definition. (Kongruenz von Winkeln) Seien
Dann definiert man
6
6
(v1 , w1 ) und
6
v2 , w2 zwei Winkel.
(v1 , w1 ) ≡ 6 v2 , w2 ⇔ w(v1 , w1 ) = w(v2 , w2 ).
Definition. (Zwischenrelation) Sei g eine Gerade und x, y, z ∈ g drei Punkte. Dann
definiert man
x < y > z :⇔ ( xi < yi < zi oder zi < yi < xi ),
für alle 1 ≤ i ≤ 3.
Satz. Die Menge der Punkte, Geraden und Ebenen der kartesischen Geometrie, zusammen
mit den Relationen ⊲⊳, <>, ≡ wie oben definiert erfüllen die Axiome der Hilbertschen
Geometrie.
Beweis. Man muss alle Axiome der Hilbert’schen Axiomengruppen I-V nachweisen. Dies
ist leicht, aber zeitaufwendig. deswegen verzicheten wir hier auf Details. ♦
Orthogonale Vektoren.
Man kann schon definieren, wann zwei Vektoren (und damit zwei Strecken oder zwei Geraden) senkrecht stehen, bevor man das Euklidische Winkelmaß voll eingeführt hat.
Definition Zwei Vektoren v, w sind senkrecht (in Zeichen: v ⊥ w), wenn
v·w =0
für das Skalarprodukt gilt.
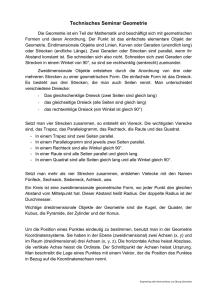
Satz. Seien v, w zwei Vektoren. Dann ist die orthogonale Projektion u von w
auf v gegeben durch
v·w
v
u=
v·v
w
u
v
Orthogonale Projektion von
w auf v
Klaus Johannson, Geometrie
§4 Cartesische Geometrie I
23
Bemerkung. Man beachte übrigens, dass man in dem obigen Quotienten nicht etwa v
kürzen darf!
Beweis. Wir haben die folgende Bedingung für die orthogonale Projektion:
(w − tv) · v = 0 ⇒ w · v − tv · v = 0 ⇒ t :=
w·v
v·v
und so folgt der Satz. ♦
Satz (Satz von Pythagoras) Falls v ⊥ w, dann gilt
|v − w|2 = |v|2 + |w|2 .
Beweis. |v − w|2 = (v − w)2 = v2 − 2v · w + w2 = v2 + w2 = |v|2 + |w|2 . ♦
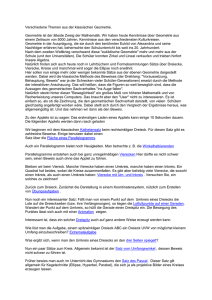
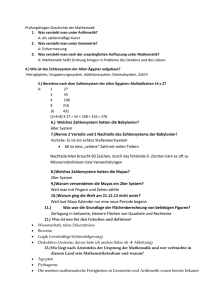
Satz. (rechte Winkel im Kreis) Sei ∆ABC ein Dreieck mit der Eigenschaft, dass
A, B, C Punkte eines Kreises dessen Mittelpunkt auf der Strecke AB liegt. Dann sind
die beiden Seiten AC und BC orthogonal, d.h. AC ⊥ BC.
C
C
v+w
w-v
w
A
B
Orthogonalität im Kreis
A
v
v
B
Wahl der Vektoren
Beweis. Dies kann man auch mit Vektorrechnung beweisen. Aber es kommt auf die
richtige Wahl der Vektoren an, damit das funktioniert. Mit der Bezeichnung oben rechts
berechnen wir:
(v + w) · (w − v) = v · w − v · v + w · w − v · w = −v · v + w · w = −r2 + r2 = 0,
wobei r =k v k=k w k der Radius des Kreises ist. ♦
Die folgende geometrische Eigenschaft wurde oft als besondere Leistung der Mathematik
bewundert (siehe z.B. [Kant, Kritik der Urteilskraft]).
Klaus Johannson, Geometrie
24
3. Geometrie
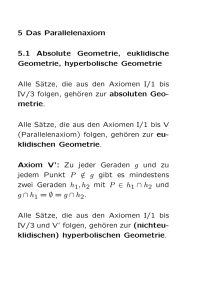
Satz. Sei g der Durchmesser eines Kreises und h eine Strecke im selben Kreis mit
Endpunkten auf dem Kreis und senkrecht zum Durchmesser g. Dann teilt der Schnittpunkt
diese beiden Strecken in Strecken a = |p|, b = |q| bzw. c = |r|, c = |r| so dass a · b = c · c.
C
r-p
r-q
r
A
p
-r
q
B
pq = rr
Beweis. 0 = (r − p) · (r − q) = r · r − r · q − p · r + p · q ⇒ 0 = −|r|2 + |p| · |q|. ♦
Sätze über Dreiecke.
Wir werden zeigen, dass sich in einem Dreieck sowohl die drei Seitenhalbierenden, die drei
Winkelhalbierenden und die drei Lote jeweils in einem Punkt schneiden. In jedem Fall
werden wir eine andere Beweismethode benutzen, um zu zeigen wie verschieden man in
der kartesichen Geometrie (durch Rechnen) beweisen kann.
Definition. Eine Strecke zwischen zwei Vektoren v, w ∈ R3 ist jede Teilmenge
[v, w] = {v + λ(w − v) | 1 ≤ λ ≤ 1 } ⊂ R3
Definition. Zwei Strecken [v, w] und [v′ , w′ ] sind kongruent, wenn
|w − v| = |w′ − v′ |
Zwei Winkel
6
(v, w) und
6
(v′ , w′ ) sind kongruent, wenn
|6 (v, w)| = |6 (v′ , w′ )|
Definition. Ein Dreieck ∆ABC ist ein Streckenzug
AB, BC, CD
in der Ebene, der aus drei Strecken besteht.
Klaus Johannson, Geometrie
§4 Cartesische Geometrie I
25
Wir demonstrieren das Neue an der Descarte’schen Methode zunächst an dem Dreieckssatz
über Winkelhalbierende (danach betrachten wir Seitenhalbierende und Lote). Wir geben
für den Satz über Winkelhalbierende drei verschiedene Beweise (einen intuitiven Beweis,
einen axiomatischen Beweis und eine Descarte’schen Beweis).
Satz. Die Winkelhalbierenden eines Dreiecks ∆ABC treffen sich in einem Punkt.
1. Beweis. (intuitiver Beweis) Für den ersten Beweis betrachte die folgende Figur.
C
A
B
Intuitive Methode
Die Winkelhalbierende von AB und AC besteht aus den Mittelpunkten aller Kreise die
diese beiden Geraden berühren. In dieser Familie von Kreisen gibt es genau einen Kreis
der auch noch die Gerade BC berührt. Dessen Mittelpunkt sei m.
Entprechendes gilt für die beiden anderen Paarungen von Geraden, nämlich BA und BC
sowie CA und CB. In jedem Fall erhält man, dass m auf der Seitenhalbierenden liegt.
Also liegt m auf allen drei Winkelhalbierenden. Dies beweist den Satz.
2. Beweis. (axiomatischer Beweis). Der zweite Beweis stammt aus dem Euklidischen
Lehrbuch. Er besteht darin den Satz auf einen der Kongruenzsätze zurückzuführen und
dieser ist aus den Axiomen bewiesen. HIerzu betrachte die folgende Figur:
C
c
E
v
a
w
M
b
u
A
D
B
Axiomatische Methode
Klaus Johannson, Geometrie
26
3. Geometrie
Sei
M = Schnittpunkt der Winkelhalbierenden von A und der Winkelhalbierenden von B
und u, v, w die Lote von M auf die Seiten des Dreiecks ∆ABC.
Dann beobachte, dass für die beiden Dreiecke
∆ADM ≡ ∆AEM.
Dies folgt aus einem der Kongruenzsätze, da die beiden Winkel bei A gleich sind, weiter
ist die Seite a gemeinsam und schließlich sind die beiden rechten Winkel gleich.
Es folgt, dass die Lote u, v gleich sind, ebenso sind die Lote v, w gleich.
Nun sind die beiden Dreiecke bei C kongruent (gemeinsame Seite, rechte Winkel sind
gleich und die Lote v, w sind gleich). Also sind die Winkel die u und w gegenüber
liegen auch gleich. Es folgt, dass die Linie CM Winkelhalbierende des Winkels 6 ACB
ist.
Damit ist gezeigt, dass die Winkelhalbierenden sich alle im Punkt M treffen. ♦
3. Beweis. (Descarte’scher Beweis). Die beiden bisher gezeigten geometrischen Beweise beruhten auf einer cleveren Idee. Jede andere geometrische Situation stellt einen
neuen Fall dar, die wieder eine neue clevere Idee braucht, um sie zu beweisen usw. Für
jeden Fall also wieder eine Idee. Descartes möchte hiervon wegkommen. Er möchte
vielmehr Rechenverfahren angeben, welches alle Fälle gleichbehandelt. Dieses Rechenverfahren sollte allgemein und einfach sein. Keine cleveren Ideen sollten nötig sein, um
es zu benutzen. Wenn möglich sollte es zu neuen Entdeckungen führen. Ich möchte an
diesem Beweis illustrieren, wie dieses Verfahren wirkt.
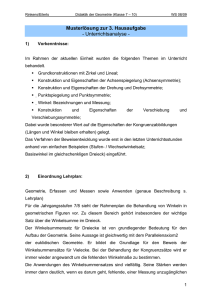
Die Methode ist leicht beschrieben. Sie besteht darin die Koordinaten aller Schnittpunkte
von Winkelhalbierenden zu berechnen und nachzusehen, ob sie denselben Punkt ergeben.
Wie gesagt, all dies sollte ja ohne besondere Anstrengung, fast automatisch geschehen.
Betrachte die folgende Figur
[a,b]
k
[ua,ub]
g
[0,0]
[w(a-1),wb]
M
h
[1,0]
[1,0]
Descarte’sche Methode
Klaus Johannson, Geometrie
§4 Cartesische Geometrie I
27
Hier bezeichnen u, w ∈ R irgendwelche Parameter. Aber man beachte, dass im Fall
u := | [a, b] |−1 ,
w := | [a − 1, b] ]−1 .
die Vektoren [ua, ub] und [w(a − 1), wb] Einheitsvektoren sind, d.h. Länge 1 haben.
Wir stellen die folgende Gleichungen auf:
(1 + ua)α
ua
1
α
=
+
g:
ubα
ub
0
1
1
(w(a − 1) − 1)β + 1
w(a − 1)
h:
+ −
β=
+
0
wbβ
wb
0
a + (ua + wa − w)γ
w(a − 1)
ua
a
γ =
+
+
k:
b + (ub + wb)γ
wb
ub
b
Man beachte, dass diese Gleichungen im Falle u := | [a, b] |−1 ,
Gleichungen der drei Winkelhalbierenden sind.
Wir berechnen nun die Koordinaten von
w := | [a − 1, b] ]−1
Schnittpunkt g ∩ h:
I.
II.
⇒ α=
(1 + ua)α = (w(a − 1) − 1)β + 1
ubα = wbβ
w
u β.
⇒ (1 + ua) w
u β = (wa − w − 1)β + 1
⇒ (1 + ua)wβ = (uwa − uw − u)β + u
⇒ wβ + uwaβ = uwaβ − uwβ − uβ + u
u
⇒ β = u+uw+w
⇒ α=
w
u+uw+w .
Schnittpunkt g ∩ k:
I.
II.
(1 + ua)α = a + (ua + wa − w)γ
ubα = b + (ub + wb)γ
⇒ α=
II ⇒ α = b+(ub+wb)γ
ub
Einsetzen von α in I. ergibt:
1+(u+w)γ
u
⇒ (1 + ua)(1 + (u + w)γ) = au + (ua + wa − w)uγ
⇒ 1 + ua + (1 + ua)(u + w)γ = au + (ua + wa − w)uγ
⇒ 1 + uγ + wγ + u2 aγ + uwaγ = u2 aγ + uwaγ − uwγ
−1
⇒ γ = u+uw+w
Klaus Johannson, Geometrie
28
3. Geometrie
Jetzt überprüfen wir die Gleichheit der Schnittpunkte:
0=0
w + uaw = au + aw + auw − ua − wa + w
w
−1
(1 + ua)
= a + (ua + wa − w)
.
u + uw + w
u + uww
(1 + ua)α = a + (ua + wa − w)γ
Ebenso
0=0
ubw = (bu + bw + buw) − (ub + wb)
w
−1
= b + (ub + wb)
.
ub
u + uw + w
u + uw + w
ubα = b + (ub + wb)γ
Daraus folgt, dass es einen Punkt in der Geraden k gibt, dessen Koordinatengleich denen
des Schnittpunktes g ∩ h der Geraden g und h ist. Dies beweist den Satz. ♦
Bemerkung. Wir haben mit der Descarte’schen Methode sogar eine neue Entdeskung
gemacht. Es treffen sich nicht nur die Winklehalbierenden in einem Punkt, sondern alle
Geraden die man mit den Parametern u, w bilden kann (denn wir haben nirgends die
eigentliche Definition von u und w benutzt).
Fazit. Die Descarte’sche Methode ist sehr einfach. Aber ihre Durchführung für den
Menschen recht langsam und instabil. Der kleinste Fehler in der Rechnung führt sofort zu
falschen Aussagen. Die besondere Strenge und Genauigkeit, die wir für Beweise verlangen,
kommt nicht so sehr aus der Natur der Beweise, sondrn ist vielmehr ein Überbleibsel der
Descarte’schen Methode.
Satz. Die Seitenhalbierenden eines Dreiecks ∆ABC treffen sich in einem Punkt.
C
w
A
v
B
Seitenhalbierende treffen sich in einem Punkt
Klaus Johannson, Geometrie
§4 Cartesische Geometrie I
29
Beweis. Sei v := AB und w = AC.
a := 23 (v + 12 (w − v)) = 31 (v + w)
b := (v + 32 ( 21 w − v) = 13 (v + w)
c := w + 23 ( 21 v − w) = 13 (w + v)
Damit ist nachgerechnet, dass a = b = c und dies ist somit ein Punkt der auf allen
Seitenhalbierenden liegt. Somit ist der Satz bewiesen. ♦
Satz. Sei ∆ABC ein Dreieck. Die Senkrechten von den Ecken, A, B, C, auf die
gegenüberliegenden Seiten, BC, AC, AB, des Dreiecks schneiden sich alle drei in einem
Punkt.
C = [b,c]
k
h
g
B = [a,0]
A = [0,0]
Lote treffen sich in einem Punkt
Beweis. Wir bezeichnen die Eckpunkte mit Koordinatenvektoren wie folgt:
b
a
0
.
, C=
, B=
A=
c
0
0
Dann gelten für die Senkrechten g, h, k die folgenden Formeln:
c
a
x
c
0
x
0
b
x
+γ
=
, k:
+β
=
, h:
+α
=
g:
−b
0
y
a−b
0
y
−a
c
y
Wir berechnen den Schnitt g ∩ h der Senkrechten g und h wie folgt:
c
0
b
⇒
=β
+α
a−b
−a
c
b − βc = 0
c − αa − β(a − b) = 0
⇒ β = b/c
Eingesetzt in h liefert den folgenden Ausdruck für den Schnittpunkt:
b
0
c
0
b
c
+
=
+β
m=
= b2 −ab
0
a−b
0
c a−b
c
Klaus Johannson, Geometrie
30
3. Geometrie
Es bleibt zu zeigen, dass m nicht nur auf der Senkrechten g, sondern auch auf den
Senkrechten h und k liegt.
Setze α :=
b2 −ab−c2
,
ac
dann gilt
b2 − ba − c2 0
b
b
b
0
b
= c2
+
=
+α
= b2 −ab = m
b2 −ab−c2
a
c
a
c
ac
c +
c
c
Setze γ :=
b−a
c ,
dann gilt
b−a c
a
b
+
= b2 −ab = m
0
b
c
c
Dies beweist den Satz. ♦
Klaus Johannson, Geometrie