r - IAP TU-Darmstadt
Werbung

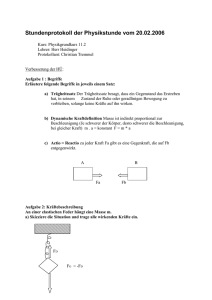
Kapitel 3 Kräfte und Drehmomente Kräfte Messung und physikalische Bedeutung einer „Kraft“ : Messung von Masse m Messung von Beschleunigung a (Rückgriff auf Längen- und Zeitmessung) Aus der Messung von Masse und Beschleunigung wird geschlossen : Auf den Körper wirkt eine Kraft : F ma mr Konsequenzen : a0 F 0 d.h. ein freies Teilchen ändert seinen Bewegungszustand nicht. und : Kraft ist Vektor, kann auch aus Summe von Kräften resultieren (da auch gilt : Beschleunigung ist Vektor) Fges Fi i 2 Kraft und Impuls zunächst : Ursache der Kräfte ist hier jetzt (noch) nicht ergründet wenn gilt : Fges Fi 0 dann ist der Körper kräftefrei i Definition des Impulses : p mv d p mv m v mv m v ma dt oft gilt : 0 m d.h. Massenerhaltung allgemein (auch ohne Massenerhaltung) gilt : p ma F p 3 Messung von Kräften Messung von Kräften über Beschleunigungen ist i.d.R. unpraktisch Statische Methoden meist einfacher anwendbar z.b. Verformung von (geeichten) Federn durch zu bestimmende Kraft Beobachtung : Dehnung der Feder ist (in erster Näherung) proportional zu Kraft Fx D x x0 Hook‘sches Gesetz stationärer Zustand ist erreicht, sobald gilt : D x x0 Fext x0 Anwendung zur Messung der Gewichtskraft : x Anheben der Masse m durch Feder, bis die Kraft in der Dehnung der Feder die Gewichtskraft kompensiert : D x x0 mg D x x0 m g FG mg 4 Grundgleichungen der Mechanik : Newton‘sche Axiome Jeder Körper verharrt im Zustand der Ruhe oder der gleichförmigen geradlinigen Bewegung, solange keine Kraft auf ihn wirkt. 1. Newton‘sches Axiom Der Impuls eines kräftefreien Teilchens p mv ist zeitlich konstant Eine auf ein Teilchen wirkende Kraft führt zur Änderung seines Impulses Fp 2. Newton‘sches Axiom Einheit der Kraft : 1 kg·m/s2 = 1 Newton Zwei Körper, die miteinander wechselwirken, üben aufeinander gleich große, aber entgegengesetzt gerichtete Kräfte aus (actio = reactio) 3. Newton‘sches Axiom 5 Beispiel : Bewegung einer Rakete Prinzip : Durch Ausstoßen von Masse (Gas, Treibstoff,…) entsteht ein Impuls des Gases nach hinten. Wegen actio = reactio erfährt der Körper der Rakete eine Kraft nach vorne. Das funktioniert umso besser, je schwerer die ausgestoßene Masse ist Wasser als Treibstoff funktioniert viel besser als Gas beachte : Bei der Rakete gilt keine Massenerhaltung Kraft durch Teilchenausstoß : F p m v mv Annahme : konstante AusströmGeschwindigkeit v F m m t vt Beschleunigung der Rakete : aRakete t mt 6 Träge Masse & schwere Masse (Gewicht) Eigenschaft eines Körpers der Masse m ohne Krafteinwirkung im Bewegungszustand zu verharren „Trägheit“ träge Masse mT Gewicht einer Masse durch F = mg (Gravitation) schwere Masse mS Anmerkung : Messungen, die auf möglichen Unterschied von Trägheit und Gewicht abzielen, zeigen : (mT - mS )/mT < 10-10 Einstein postulierte mT mS da beide Größen ununterscheidbar sind In einem geschlossenen Fahrstuhl kann man nicht entscheiden, ob der Fahrstuhl in einem homogenen Gravitationsfeld ruht (Abb. a) oder ob er sich mit der Beschleunigung a=−g in einem gravitationsfreien Raum bewegt (Abb. b). Im letzten Fall wird man mit der Beschleunigung g nach unten gedrückt – genau wie im Schwerefeld). Alle Experimente innerhalb des Fahrstuhls führen in beiden Fällen zu gleichen Resultaten. 7 Anmerkung : …zum Begriff des Beharrungsvermögen/der Masseträgheit schnell ziehen langsam ziehen Gedankenexperiment : Betrachte eine Masse M an einer Feder; die Masse dehnt die Feder durch die Gewichtskraft F1 = Mg. (links) Wenn man sehr schnell mit Kraft F2 zieht, dann muss zunächst die Masse M beschleunigt werden, erst danach kann die Dehnung bzw. F1 durch die zusätzliche Beschleunigung zunehmen. (rechts) Wenn man langsam zieht, dann wirkt die Kraft quasi direkt auf die Feder und erhöht Dehnung bzw. F1 – ohne Verzögerung durch Beschleunigung der Masse M. Die Überlegung zeigt, dass bei der schnellen Bewegung der Effekt auf die Feder quasi verzögert eintritt, da erst die Masse beschleunigt werden muss; die Masse reagiert also „träge“ 8 Beispiel : Ortsabhängige Kraft : Bewegung im Schwerefeld bisher angenommen : Konstante Wirkung der Gravitation, d.h. Gewichtskraft mg soll nicht variieren mit dem Abstand vom Erdmittelpunkt Gilt nur für kleine Entfernungsänderungen Allgemeiner gilt für die Gravitationskraft : mM FG (r ) G 2 rˆ r mit : Masse m des Körpers; Erdmasse M; Gravitationskonstante G d.h. Kraft ist ortsabhängig : F = F(r) gesucht : Lösung der Bewegungsgleichung FG r M a(r ) r G 2 m r 9 Lösung der Differential-Gleichung : „geschickte“ Umformung : r M v dv G 2 dr r M r G 2 r beachte : r = r(t) dv M dv dv dr dv v G 2 v dt dr dt dr dr r Trennung der Variablen Integration möglich 1 v dv GM r 2 dr v 2 GM C1 2 r mit der Integrationskonstanten C1 aus den Anfangs-/Randbedingungen …liefert einen Zusammenhang zwischen v und r. beachte : v = v(r) Anm.: Allgemeinste Lösung (z.B. auch freier Fall, senkrechter Wurf, etc.) 10 v 2 GM C1 2 r Anfangsbedingung zur Bestimmung der Integrations-Konstanten C1 : Auf der Höhe h = 0 bzw. r = Erd-Radius R0 sei die Anfangs-Geschwindigkeit v(R0) = v0 (z.b. beim senkrechten Wurf) : v02 GM C1 2 R0 v02 GM C1 2 R0 Außerdem kennen wir die Erdbeschleunigung am Erdboden a(R0) = g aus : mM FG R0 G mg 2 R0 Einsetzen liefert dann : ergibt sich : v 2 gR02 v02 gR0 2 r 2 GM gR02 beachte : v = v(r) 11 v 2 gR02 v02 gR0 2 r 2 Wenn wir einen Körper mit v0 hochwerfen, dann gilt am höchsten Punkt v(rmax) = 0 für : rmax R0 v02 1 2 R0 g gR02 v02 0 gR0 rmax 2 wir sehen : rmax variiert mit v0 Je näher v02/2 an R0g, umso größer wird rmax kin Energie km v0 2 R0 g ... 11.2 s pot. Energie wird rmax = 2. Kosmische Geschwindigkeit d.h. der Körper kann das Schwerefeld der Erde verlassen und in‘s All vorstoßen (ohne auf die Erde zurückzufallen) relevant für Raketen 12 Reibung ► Reibung basiert auf Kräften bei der relativen Bewegung zweier Körper, deren Oberflächen sich berühren Mikrostruktur (Rauigkeit) der Oberfläche determiniert Reibungskräfte Oberfläche, abgebildet mit Mikroskop Haftreibung durch Verzahnung einer Oberfläche mit Mikro-Rauigkeiten „Verhakungs-Modell“ für die Wechselwirkung von Oberflächen (Vorstellung: zwei Bürsten) 13 Haftreibung : Es wird eine bestimmte Mindest-Kraft benötigt wird, um einen auf einer Oberfläche ruhenden Körper in Bewegung zu setzen. Bei geringerer Kraft bleibt der Körper auf der Oberfläche haften (s.o. Verhakungsmodell) Gleitreibung : Es wird eine Kraft benötigt wird, um einen bewegten Körper bei konstanter Geschwindigkeit zu halten. Ohne zusätzliche Kraft kommt ein gleichförmig bewegter Körper aufgrund Energie-Verlusten durch Gleitreibung irgendwann zur Ruhe exp. Beobachtung : Haftreibungskraft ist proportional zur Kraft (z.B. Gewicht), mit der der Körper auf die Oberfläche drückt (d.h. in Richtung der Normalen zur Oberfläche) FH µH FN mit der Normalkraft FN auf die Oberfläche und dem Haftreibungskoeffizienten µH äquivalent gilt für die Gleitreibungskraft : mit dem Gleitreibungskoeffizienten µG FG µG FN 14 Anmerkung : Gleitreibung ist stets schwächer als Haftreibung Erklärung : Wenn zwei Oberflächen relativ zueinander ruhen, verzahnen sich die Spitzen und Täler der Oberflächen so ineinander, dass ein relatives Minimum des mittleren Abstands beider Grenzflächen auftritt, weil dies einem relativen Minimum der Energie entspricht. Bei der Gleitbewegung gleiten die Flächen so aneinander vorbei, dass dieses Minimum nicht eingenommen wird. Beim Gleitvorgang wird vor allem von den Spitzen des „Rauigkeitsgebirges“ Material abgetragen. Rollreibung : Die Rollreibung ist wesentlich kleiner als die Gleitreibung, weil beim Abrollen die Unebenheiten im Rauigkeitsgebirge teilweise „übersprungen“ werden. Kugellager zur möglichst reibungsfreien Bewegung 15 Drehimpuls Definition : L r p m r v verknüpft Ort mit Geschwindigkeit; beschreibt die Stärke der Dynamik bei der Bewegung auf einer Bahn eˆx rp x px eˆ y eˆz y z ypz zp y , zpx xpz , xpy ypx py pz Anmerkung : Später werden wir sehen, dass der Drehimpuls eine sehr sinnvolle (und äußerst wichtige) physikalische Größe ist. 16 Beispiel : Gradlinige Bewegung Bahn des Objektes Objekt mit Masse m v r t L m r v b = Stoßparameter ( Abstand Bahn – Ursprung) Bezugszentrum (Ursprung) L L m r v sin mvb Falls v = const. ist der Drehimpuls konstant (unabhängig vom Ort auf der Bahn) Bei der unbeschleunigten, gradlinigen Bewegung ist der Drehimpuls-Betrag eine Erhaltungsgröße 17 Beispiel : Gleichförmige Kreisbewegung v t r t Geschwindigkeit ist stets tangential an der Bahn bei der Kreisbewegung stehen Ortsvektor r und Geschwindigkeit v stets senkrecht Drehimpuls L steht senkrecht auf der Ebene der Kreisbewegung, d.h. || L m r v mit : v r L L mrv L m r 2 const. 2 Vektor-Schreibweise : L m r 18 Drehimpuls und Drehmoment Wir betrachten die zeitliche Veränderung des Drehimpulses : d r p L rp rp dt v p r p rp Kraft mal Hebelarm rF Drehmoment Definition : DL D r F Die zeitliche Änderung des Drehimpulses ist gleich dem wirkenden Drehmoment vergleiche : Die zeitliche Änderung des Impulses ist gleich der wirkenden Kraft 19 Beispiel : Zentral-Felder F (r ) f (r ) rˆ Drehmoment : Kraft-Vektor ist parallel (anti-parallel) zum Ortsvektor D r F 0 Drehimpulsänderung : L D 0 In Zentralfeldern ist der Drehimpuls eine Erhaltungsgröße v t r t v t r t z.B. Bewegung der Erde im Gravitationsfeld der Sonne (links : Kreisbahn als Näherung; rechts : Ellipsenbahn. In beiden Fällen ist der Drehimpuls eine Erhaltungsgröße) 20