_pdf Skript Induktionsvorgänge
Werbung

Institut für
Grundlagen der Elektrotechnik und
Elektromagnetische Verträglichkeit
Lernprogramm Induktionsvorgänge
Skript: Teil Grundlagen
Version: 07.12.2003
http://www.Uni-Magdeburg.de/iget/multimedia
Inhalt
Seite
Über das Programm
3
1
Lernziel
4
2
Problemstellung
5
3
Grundlagen
7
3.1
Induktionsgesetz und Ursachen für Induktionsvorgänge
7
3.2.
Ruheinduktion
10
3.2.1
Erläuterungen zum Gesetz der Ruheinduktion
10
3.2.2.
Zusammenfassung und Handhabung des Gesetzes
der Ruheinduktion
21
3.2.3
Schritte bei der Anwendung des Gesetzes der Ruheinduktion
23
3.3
Bewegungsinduktion
26
3.3.1
Erläuterungen zur Bewegungsinduktion
26
3.3.2
Zusammenfassung und Handhabung des Gesetzes
der Bewegungsinduktion
32
3.3.3
Schritte für die Anwendung des Gesetzes der
Bewegungsinduktion
35
3.4
Der allgemeine Induktionsvorgang
37
3.4.1
Erläuterungen zum allgemeinen Induktionsvorgang
37
3.4.2
Schritte bei der Anwendung des Induktionsgesetzes in
allgemeiner Form
40
Anhang
43
2
Über das Programm
Herzlich willkommen zum Skript des Grundlagenteils, der auch im interaktiven Programm Induktionsvorgänge integriert ist, das Sie unter
http://www.uni-magdeburg.de/iget/multimedia finden können. Dort können Sie die im Skript enthaltenen Bilder auch interaktiv in 3D-Darstellung
betrachten.
In dem Skript sind die theoretischen Grundlagen der Induktionsvorgänge
und die Lösungsmethodik für ihre Berechnung dargestellt. Es dient der
Vertiefung oder Auffrischung der Kenntnisse aus der Vorlesung Grundlagen der Elektrotechnik.
Auf der Webseite des Institutes finden Sie weitere webbasierte Lernmodule und Downloads zu Themen aus dem Bereich Grundlagen der
Elektrotechnik. Diese bieten Ihnen die Möglichkeit, ihr Wissen zu vertiefen
und sich detailliert auf die Prüfung in den Grundlagen der Elektrotechnik
vorzubereiten.
3
1
Lernziel
Lernziel des Programms INDUKTIONSGESETZ ist die Vermittlung bzw.
Vertiefung und Festigung der Kenntnisse zu einem der wichtigsten Gesetze der Elektrotechnik, dem Faradayschen Induktionsgesetz (engl.: Faraday’s Law).
Ausgehend von der mathematischen Formulierung des Gesetzes in Integraldarstellung1 soll erreicht werden
•
•
•
ein physikalisches Verständnis für die Induktionsvorgänge in ihrer
Wechselwirkung zwischen magnetischem und elektrischen Feld, für
die Ursachen der Induktionsvorgänge sowie die zahlreichen Anwendungen, die uns im täglichen Leben begegnen (z.B. Spulen und
Transformatoren, Generatoren, Motoren und vieles mehr),
die Fähigkeit zur Berechnung induzierter Feldstärken, Urspannungen
und Ströme durch formale Anwendung des Induktionsgesetzes unter
notwendiger Beachtung von Richtungs- und Vorzeichenfestlegungen,
die Fähigkeit, die im elektromagnetischen Feld ablaufenden
Induktionsvorgänge im Kontext elektrischer Netzwerke zu behandeln (Netzwerkinterpretation).
Darüber hinaus soll erkannt werden, dass die über das Induktionsgesetz
erzeugten elektrischen Felder
einen anderen Charakter haben (sie sind so
v
genannte Wirbelfelder, E -Linien sind stets in sich geschlossen) als die
v
durch Ladungen erzeugten Felder (wirbelfreie Felder oder Quellenfelder, E
-Linien beginnen in positiven Ladungen und enden in negativen Ladungen).
1
Im Sinne einer Behandlung des Induktionsgesetztes im Rahmen der Grundlagen der
Elektrotechnik wird in diesem Lernmodul bewusst auf die differentielle, etwas abstrakte
Betrachtungsweise anhand des Kalküls der Vektoranalysis verzichtet.
4
2
Problemstellung
Während das Amperesche Durchflutungsgesetz beschreibt, dass und
wie ein elektrischer Strom ein Magnetfeld erzeugt, beschreibt das
Faradaysche Induktionsgesetz die Erzeugung eines elektrischen Feldes
durch ein magnetisches Feld. Ein statisches (zeitlich konstantes Magnetfeld) kann in einer ruhenden Umgebung niemals ein elektrisches Feld oder
einen elektrischen Strom induzieren. Voraussetzung dazu ist immer eine
Änderung, entweder ein zeitlich sich änderndes Magnetfeld oder eine Bewegung.
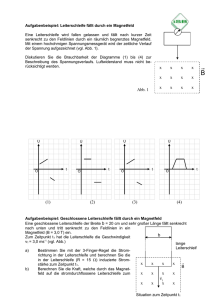
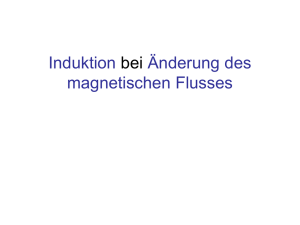
Symbolische Anordnungen, die sich an die Faradayschen Experimente anlehnen, zeigen die Bilder 2.1 und 2.2 .
Dieser sehr allgemeine Sachverhalt zeigt, dass das Phänomen der Induktion, das im Induktionsgesetz mathematisch exakt formuliert ist, in der
Realität bei den zeitveränderlichen elektromagnetischen Vorgängen nahezu "allgegenwärtig" ist. Dies betrifft nicht nur die typischen konventionellen Anwendungen wie Spulen, Transformatoren, elektromechanische
Generatoren und Motoren, sondern auch, um nur einige weitere Anwendungen zu nennen, das Entstehen von Wirbelströmen, den Skineffekt,
elektromagnetische Schirmung, das Übersprechen auf Leitungen sowie
Erzeugung, Ausbreitung und Empfang elektromagnetischer Wellen.
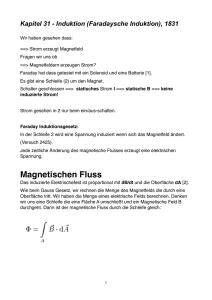
Bild 2.1
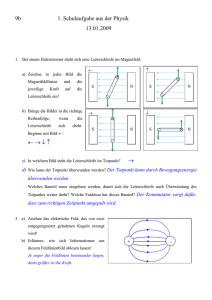
Bild 2.2
Bewegt man einen Leiter im Magnetfeld des Permanentmagneten,
wird in der geschlossenen Leiterschleife ein Strom erzeugt.
Eine vom Strom durchflossenen Spule
erzeugt in der zweiten Spule einen
elektrischen Strom, wenn eine der
Spulen bewegt wird oder wenn sich
der Strom in der ersten Spule ändert
(z.B. Ein- oder Ausschalten des Stromes)
5
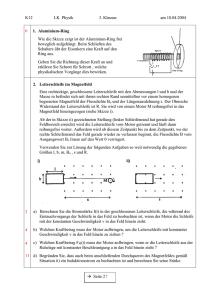
Die exakte Beschreibung der genannten realen Anwendungen ist im Allgemeinen dadurch gekennzeichnet, dass das Induktionsgesetz mit dem
Durchflutungsgesetz wechselwirkt (geschlossener Wirkungsmechanismus,
s. Bild 2.3).
Bild 2.3
Da bei der Behandlung des Induktionsgesetzes das Durchflutungsgesetz
aus den Betrachtungen der Magnetfelder stationärer Ströme bereits bekannt ist, wird die Rückwirkung induzierter Ströme auf das Magnetfeld in
die Betrachtungen zur Anwendung des Induktionsgesetzes eingeschlossen.
Dann kann man auch erkennen bzw. Bedingungen formulieren, wenn eine
solche Rückwirkung nicht stattfindet oder vernachlässigbar ist.
Diese Betrachtungsweise entspricht vielen realen Anwendungen. Denn die
mit dem Induktionsgesetz verbundenen Umwandlungen magnetischer
Energie in elektrische Energie erfordern einen Stromfluss auf der elektrischen Seite.
6
3
Grundlagen
3.1
Induktionsgesetz und Ursachen für Induktionsvorgänge
Wir gehen aus von der Integralform des Faraday’schen Induktionsgesetzes:
ui =
r r
d r v
dψ
E
d
s
=
−
BdA = −
Ñ∫s
∫
dt A
dt
(3.1.1)
Dabei ist ui die in einer Schleife s induzierte Urspannung, die sich gemäß
ui =
Ñ∫
r r
Eds
(3.1.2)
s
als das Wegintegral der induzierten elektrischen Feldstärke entlang der
Schleife s ergibt. Weil ui an den geschlossenen Umlauf gebunden ist, wird
sie auch als induzierte Umlaufspannung bezeichnet.
Der mit der Schleife s verkettete magnetische Fluss ψ ergibt sich gemäß
r r
ψ = ∫BdA ,
(3.1.3)
A
r
wobei die magnetische Flussdichte B über die von der Schleife s aufgespannte Fläche A zu integrieren ist.
v
r
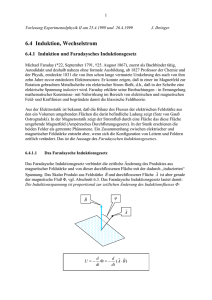
Die mathematische Zuordnung von ds und dA erfolgt entsprechend dem
Stokesschen Satz gemäß der Rechtsschraubenregel (Bild 3.1.1).
r
ds
r
en
Wegelement
Normaleinheitsvektor
r
Flächenelementes dA
des
Bild 3.1.1
7
In Übereinstimmung damit treffen wir eine Richtungsfestlegung für die
integralen Größen ui und ψ entsprechend Bild 3.1.2.
Bild 3.1.2
Das Induktionsgesetz gemäß Gl. (3.1.1) kann folgendermaßen formuliert
werden:
Ist eine beliebige offene Fläche A mit einem sich zeitlich ändernden
magnetischen Fluss ψ verkettet, so wird in der Berandung s dieser
Fläche eine elektrische Urspannung u i=
r r
E
Ñ∫ d s
induziert, deren
s
Wert der negativen zeitlichen Änderung
−
dψ
dt
des verketteten
magnetischen Flusses entspricht.
Wichtige Bemerkung:
Das Induktionsgesetz gilt unabhängig von der physischen Beschaffenheit
der Kontur s . Diese kann eine fiktive Berandung oder eine reale Leiterschleife sein. Im Falle einer realen Leiterschleife würde die induzierte Urspannung ui dann in Umlaufrichtung einen Strom i antreiben. Ist zum
Beispiel der Widerstand der Stromschleife R, so gilt
u i=
r r
dψ
E
Ñ∫ d s = − dt = R i
(3.1.4)
Die Richtung für i > 0 stimmt mit der Richtung für ui > 0 überein (s. Bild
3.1.2).
Bei Bezug auf die vereinbarten positiven Richtungszuordnungen gemäß
Bild 3.1.2 kann in Abhängigkeit davon, ob sich der verkettete magnetische
8
Fluss ψ bezüglich der positiv definierten Richtung vergrößert (
dψ
> 0 ) oder
dt
dψ
< 0 ), die Richtung der induzierten Urspannung ui und
dt
damit die Stromrichtung ermittelt werden (s. Bild 3.1.3).
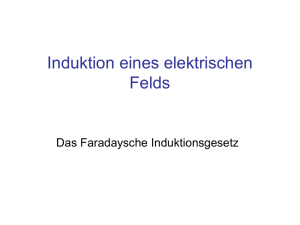
verkleinert
(
Flusszunahme
dΨ
Gl.(3.3.1)
Ψ > 0;
> 0
→ u i< 0
dt
d.h. Stromfluss in negativer Richtung
Bild 3.1.3a
Flussabnahme
Ψ > 0;
dΨ
Gl.(3.1.1)
< 0
→ u i> 0
dt
d.h. Stromfluss in positiver Richtung
Bild 3.1.3b
Aus Bild 3.1.3 ist zu entnehmen, vdass der durch den induzierten Strom
selbst hervorgerufene Fluss (als B selbst –Linien im Bild 3.1.3 angedeutet;
r
B -Linien sind gemäß Durchflutungsgesetz immer nach einer Rechtsschraube dem Strom zugeordnet) stets der ursächlichen Flussänderung
entgegenwirkt.
Dieser Sachverhalt ist als Lenzsche Regel bekannt.
Die gemäß Gl. (3.1.1) für einen Induktionsvorgang erforderliche zeitliche
Änderung des mit einer Schleife s verketteten magnetischen Flusses Ψ
kann auf verschiedene Weise erreicht werden:
v
1. durch eine ruhende Schleife in einem zeitveränderlichen B -Feld
(Ruheinduktion),
r
2. durch eine bewegte Schleife in einem zeitlich konstanten B -Feld
(Bewegungsinduktion),
r
3. durch eine bewegte Schleife in einem zeitveränderlichen B -Feld
(Ruhe- und Bewegungsinduktion gleichzeitig).
Diese Fälle werden nachfolgend getrennt betrachtet.
9
3.2 Ruheinduktion
3.2.1 Erläuterungen zum Gesetz der Ruheinduktion
•
Erweiterung der Vorstellungen zur elektrischen Feldstärke
r
Ein zeitlich sich änderndes Magnetfeld B( t) induziert ein elektrisches Feldr
stärkefeld, das wir mit E i bezeichnen wollen, dessen Feldlinien geschlosr
sen sind und die B -Linien umwirbeln (s. Bild 3.2.1).
Bild 3.2.1
Für das Umlaufintegral auf einem geschlossenen Weg s gilt dann
r r
dψ
E
Ñ∫s i d s = u i= − dt ≠ 0
(3.2.2)
r
Diese induzierte elektrische Feldstärke Ei erweitert unsere bisherigen Vorstellungen über die elektrische Feldstärke, die wir von den statischen
elektrischen Feldern kennen.
Diese
r
r wird stets von Ladungen erzeugt. Wir
nennen sie hier deshalb E q . Die E q -Linien beginnen in positiven Ladungen
(Quellen) und enden in negativen Ladungen (Senken). Es gilt stets
r r
E
Ñ∫ q d s = 0 ,
(3.2.3)
s
was identisch ist mit der Unabhängigkeit des Linienintegrals vom Weg.
Ein allgemeines elektrisches Feld setzt sich aus beiden
Anteilen zusamr
men, einem wirbelfreien Feld (reines Quellenfeld) E q und einem reinen,
r
durch den Induktionsvorgang erzeugtes Wirbelfeld (quellenfreies Feld) E i :
10
r r r
E = E i+ E q
(3.2.4)
Für das Umlaufintegral gilt dann unter Beachtung von Gl. (3.2.3)
r r
E
Ñ∫ d s =
s
r r
r
(E
+
E
)
d
s
Ñ∫ i q =
s
r r
E
Ñ∫ i ds ,
(3.2.5)
d.h.
in das Induktionsgesetz geht nur die induzierte elektrische Feldstärke
r
E i ein. Wegen Gl. (3.2.5) kann aber die Indizierung entfallen.
r r
Das Umlaufintegral ∫ E ds ≠ 0 bedeutet, dass das Wegintegral der elektrischen Feldstärke zwischen zwei Punkten, also die Spannung zwischen
diesen Punkten, nicht mehr wegunabhängig ist, sondern vom gewählten
Integrationsweg abhängt.
Bild 3.2.2 veranschaulicht den Sachverhalt an einer Schleife s, die aus
zwei Teilen s1 und s2 zwischen den Punkten a und b besteht und die mit
einem zeitveränderlichen magnetischen Fluss verkettet ist.
Bild 3.2.2
Für den geschlossenen Umlauf gilt
11
r r br r br r
dψ
E
d
s
=
E
d
s
−
E
d
s
=
−
Ñ∫s
∫a
∫a
dt ,
( s1 )
( s2 )
dψ
≠0
dt
d.h. für
r r br r
= ∫ E d s ≠ ∫ E d s = Ua b
gilt:
b
ua b
Weg s1
a
( s1 )
a
Weg s 2
(3.2.6)
( s2 )
Dieser durch die Gl. (3.2.6) ausgedrückte Sachverhalt ist fundamental und
sagt aus: in Anordnungen mit zeitlich veränderlichen Feldern (wo das Induktionsgesetz wirksam ist) ist eine Spannungsangabe nur sinnvoll in
Verbindung mit der Angabe des Integrationsweges.
Dies muss bei Spannungsmessungen in Wechselstromkreisen beachtet
werden, wo die Anordnung des Messkreises (die den Integrationsweg bestimmt) Einfluss auf das Messergebnis haben.
12
•
Netzwerkinterpretation der induzierten Urspannung
Eine weitere wichtige Feststellung ist, dass die induzierte elektrische Urspannung ui eine verteilte, an den geschlossenen Umlauf gebundene
Urspannung ist und keinem Ort der Schleife fest zugeordnet werden kann.
Um dennoch die von den Netzwerken bekannten Vorstellungen konzentrierter Elemente weiterhin nutzen zu können, ist es sinnvoll, die induzierte Urspannung ui mit dem bekannten Symbol einer Spannungsquelle
darzustellen und in die Stromkreisberechnung einzubeziehen.
Wir betrachten zunächst eine unendlich gut leitende, mit einem Fluss ψ
verkettete Schleife mit einem kleinen Spalt zwischen den Punkten 1 und 2
(s. Bild 3.2.3a).
Bild 3.2.3a
Bild 3.2.3b
Für diese Anordnung gilt das Induktionsgesetz Gl. (3.2.1):
1 r
r r 2r r
dψ
u i = Ñ∫ E d s = ∫ E d s
+ ∫Eds = −
dt
1
2
{
{
=0
U21
r
weil E = 0
(idealerLeiter)
(3.2.7)
13
Damit erscheint die induzierte Urspannung ui = −
an den Klemmen:
u 21 = u i (= −
dψ
als Spannungsfall u21
dt
dψ
) .
dt
(3.2.8)
Gl. (3.2.8) wird erfüllt, wenn wir ui als Urspannungsquelle bzw. als Quellenspannung uqi in die Schleife gemäß Bild 3.2.3b einführen. Der
Maschensatz in dieser Schleife lautet dann
u21 − uqi = 0
(u qi als Quellenspannung)
u21 = ui
mit
uqi = ui = −
(u i als Urspannung)
(3.2.9)
dψ
dt
Schließt man den Stromkreis durch Überbrücken des Spaltes an den
Punkten 1-2 mit einem Widerstand R (s. Bild 3.2.4), so wird ein Strom i
angetrieben.
Bild 3.2.4
Dieser Sachverhalt wird später genauer untersucht.
Zu beachten ist, dass aufgrund des Stromflusses in Bild 3.2.4 ein magnetischer Fluss erzeugt wird, der gemäß der Lenzschen Regel dem ursprünglichen Fluss (wie im Bild 3.2.3) entgegenwirkt. Das Induktionsgesetz bezieht sich stets auf den gesamten (resultierenden) Fluss, der mit der
Schleife verkettet ist, so dass die induzierte Quellenspannung uqi im Bild
3.2.4 sich von der im Bild 3.2.3 b unterscheiden wird.
14
Führt man für eine Leiterschleife nach Bild 3.2.3 eine Zuordnung von
Klemmenstrom und Klemmenspannung nach dem Verbraucherzählpfeilsystem ein, d.h. orientiert man den Spannungsabfall u12>0 in Richtung
des Stromes, so ergeben sich die im Bild 3.2.5 dargestellten Verhältnisse.
Bild 3.2.5
Der Maschensatz lautet:
u12 + uqi = 0
d.h.
u12 = - uqi = +
dψ
dt
(3.2.10)
15
• Ruheinduktion ohne magnetisches Fremdfeld (Selbstinduktion)
Eine Induktionswirkung entsteht auch ohne den bisher angenommenen
gewissermaßen "externen" oder "fremden" magnetischen Fluss. Wir betrachten den Fall, dass die Schleife an den Klemmen 1-2 mit einem
aktiven Zweipol beschaltet wird, der eine zeitveränderliche Quellenspannung uq und einen Innenwiderstand Rq besitzt. Ein fremdes magnetisches
Feld soll nicht vorhanden sein.
Bild 3.2.6
Das
vom Strom i erzeugte Magnetfeld ist im Bild 3.2.6 dargestellt. Die
r
B -Linien sind gemäß dem Durchflutungsgesetz über eine Rechtsschraubenregel dem Strom i zugeordnet. Dadurch entsteht ein mit der
Leiterschleife verketteter Fluss ψ > 0 , mit der für das Induktionsgesetz
vereinbarten positiven Zuordnung.
Diesen Fluss, der nur vom Strom selbst erzeugt wird, bezeichnen wir als
ψ selbst . Zwischen dem Strom i und dem von ihm erzeugten und mit der
Spule verketteten magnetischem Fluss gilt die Beziehung
ψ selbst = L i ,
(3.2.11)
wobei L als Induktivität (auch Selbst- oder Eigeninduktivität) bezeichnet
wird. 2
Ersetzen wir entsprechend Bild 3.2.6 in Gl. (3.2.10) u12 durch
u12 = uq − iR q
2
Die komplizierte Aufgabe der Berechnung des magnetischen Flusses
ψ selbst ist hier verlagert in die ebenfalls komplizierte
Aufgabe der Induktivitätsberechnung, die aber nicht Gegenstand dieses Lernmoduls ist.
16
und benutzen Gl. (3.2.11) für die zeitliche Flussänderung
−
dψ selbst
dψ
di
=−
= −L
,
dt
dt
dt
so folgt
uq − iR q =
dψ selbst
di
= L = uL .
dt
dt
(3.2.12)
Die Netzwerkinterpretation gemäß Bild 3.2.7a und b zeigt,
Bild 3.2.7a
Interpretation als stromgesteuerte
Spannungsquelle (Gegenspannung)
Bild 3.2.7b
Interpretation als Spannungsabfall
an einer Induktivität
dass der Selbstinduktionsvorgang zu einer von der Stromänderung abhängigen Gegenspannungsquelle beziehungsweise bei Einführung der Induktivität L als Zweipol zu der bekannten Strom-Spannungsbeziehung
uL = L
di
dt
führt.
Sowohl die in der Netzwerkinterpretation gewählte Spannungsquelle als
auch die Induktivität sind verteilte Elemente und keiner Stelle der Schleife
fest zuordenbar.
17
Gl. (3.2.12) kann in der Form
L
di
+ R q i = u q (t)
dt
(3.2.13)
geschrieben werden. Wir erkennen, dass der Selbstinduktionsvorgang im
Zeitbereich zu einer Differentialgleichung für den Strom führt (s. Lernmodul Ausgleichsvorgänge). Im Frequenzbereich (stationärer Zustand bei
sinusförmiger Erregung, Anwendung der komplexen Rechnung) entsteht
dadurch eine Phasenverschiebung zwischen Strom und der Quellenspannung.
18
•
Ruheinduktion im allgemeinen Fall
Ist außer ψ selbst ein fremder magnetischer Fluss ψ Fremd mit der Schleife verkettet, so gilt
ψ = ψFremd + ψselbst
(3.2.14)
und das Induktionsgesetz erhält die Form
dψ Fremd
di
uR − uq = −
−L
dt 3 {
dt
1424
Fremdin−
duktion
(3.2.15)
Selbstin −
duktion
Der Selbstinduktionsterm, der Ausdruck für den geschlossnen Wirkungskreis von Induktions- und Durchflutungsgesetz ist, kann unterdrückt werden (d.h. der geschlossene Wirkungskreis kann aufgetrennt werden),
wenn gilt
L
di
=0 .
dt
(3.2.16)
Da die Induktivität L einer Schleife theoretisch nicht Null werden kann,
wird Bedingung (3.2.16) erfüllt, wenn entweder i = 0 (offene Schleife)
oder di/dt = 0 ist (i = I = const).
In praktischen Fällen kann der Selbstinduktionsterm vernachlässigt werden, wenn sein Beitrag am Induktionsvorgang hinreichend klein gegenüber dem Fremdinduktionsanteil ist.
19
•
Von der Stromschleife zur Spule
In vielen praktischen Anordnungen haben wir es nicht mit einfachen
Leiterschleifen zu tun, sondern wir haben Anordnungen, die aus vielen
Leiterschleifen bestehen (z.B. Spulen).
Wir betrachten ein rSpule aus N Windungen, die alle den gleichen magnetischen Fluss φ =
v
B
d
A
umfassen (s. Bild 3.2.8)
∫
A'
N Flächen A´, die alle gleichsinnig umlaufen und in gleicher
Richtung von φ durchsetzt werden
Bild 3.2.8
Das Umlaufintegral u i =
r r
E
Ñ∫ d s entlang der N Windungen bildet eine n-
blättrige Fläche, wobei jedes der N Blätter mit der Fläche A’ vom magnetischen Fluss φ durchsetzt wird. Der gesamte, mit der Spule verkettete
und im Induktionsgesetz wirksame magnetische Fluss ist damit
r
ψ = N ∫ BdA = Nφ
(3.2.17)
A'
Anmerkung:
Da nicht jede Windung einer Wicklung mit dem gleichen
magnetischen Fluss verkettet sein muss und sich auch
der Umlaufsinn der Windungen einer Spule umkehren
kann (z.B. bifiliare Windungen zur Herstellung induktivitätsarmer Widerstände), gilt in allgemeinerer
Form:
N
ψ = ∑ φi
(3.2.18)
i =1
vzb
(vzb: vorzeichenhaft bezüglich des positiven Umlaufsinns)
20
3.2.2. Zusammenfassung und Handhabung des Gesetzes der Ruheinduktion
Wir betrachten eine geschlossene Leiterschleife, in die konzentrierte
Schaltelemente wie Spannungsquellen, Spannungsabfallstrecken, passive
Bauelemente einschließlich des ohmschen Widerstandes der Schleife
selbst eingeschaltet sind. Die Bauelemente mögen vernachlässigbare geometrische Abmessungen haben, damit Fläche A und Rand s der Schleife
eindeutig definierbar sind. Schleifenumlauf und positive Richtung für den
verketteten magnetischen Fluss ψ werden nach der Rechtsschraubenregel
zugeordnet (s. Bild 3.2.9)
Bild 3.2.9
Das Gesetz der Ruheinduktion Gl. (3.2.1) sei hier nochmals angegeben:
r
r r
d r r
∂B r
dψ
u i = Ñ∫ E d s = −
B d A = −∫
dA = −
∫
dt A
∂t
dt
s
A
Für den Fall, dass keine Induktionswirkung stattfindet, d.h. (
(3.2.1)
dψ
= 0 ), gilt
dt
r r
E
Ñ∫ d s = 0 . Dies ist die Aussage des Maschensatzes, der, angewendet auf
die in die Schleife eingeschalteten Elemente, die bekannte Form hat:
N
∑u
n =1
vzb
n
=0
(3.2.19)
vzb: vorzeichenbehaftet bzgl. des
vorgegebenen Umlaufs
21
Wirkt das Induktionsgesetz, dann liefert dieser Maschensatz nicht den
Wert Null, sondern
N
∑u
n =1
vzw
n
=−
dψ
dt
.
(3.2.20)
Die negative zeitliche Flussänderung (- dψ/dt) ist entsprechend Gl. (3.2.1)
aus der zeitlich veränderlichen Flussdichte zu ermitteln. Im allgemeinen
Fall setzt sich die gesamte mit der Schleife verkettete Flussänderung aus
einer Fremdflussänderung ( dψFremd / dt ) und einer Flussänderung zusammen, die durch den in der Schleife fließenden Strom i(t) selbst erzeugt
wird ( dψ selbst / dt )
dψFremd
dψ selbst
dψ
=
+
dt
dt4
dt4
1
42
3
1
42
3
(3.2.21)
dψ selbst
di
= L
dt
dt
(3.2.22)
Fremdinduktion
mit
Selbstinduktion
Damit können die Schritte für die Anwendung des Gesetzes der Ruheinduktion für allgemeine Anwendungen angegeben werden.
22
3.2.3 Schritte bei der Anwendung des Gesetzes der Ruheinduktion
•
Schritt 1: Zuordnung von Schleifenumlauf und positiver Richtung
des verketteten Magnetflusses ψ gemäß einer Rechtsschraube
•
Schritt 2: Aufstellen des Maschensatzes für die geschlossene
Schleife unter der Annahme, dass keine Induktionswirkung stattfindet (Annahme:
dψ
= 0)
dt
N
∑u
n =1
vzb
n
=0
23
•
Schritt 3: Ermittlung von
Flussrichtung
dψ
dt
bezüglich der positiv definierten
Schritt 3.1: Fremdinduktion
r
d ψ Fremd
d r v
∂B r
BdA = ∫
dA ,
=
dt
d t ∫A
∂
t
A
r
∂B
wobei
die vom fremden Magnetfeld erzeugte Fluss∂t
dichteänderung darstellt.
Schritt 3.2: Selbstinduktion
d ψ selbst
di
=L
= uL
dt
dt
L: Induktivität der Leiterschleife
•
Schritt 4:
Einsetzen der Ergebnisse von Schritt 2 und 3 in den erweiterten
Maschensatz und Ermittlung der gesuchten Größen (Strom, Spannungen über den Elementen):
N
∑ un = −
n =1
vzb
24
d ψ Fremd
di
−L
dt
dt
Ergänzung
Netzwerkinterpretation der durch Fremd- und Selbstinduktion induzierten
Spannungen und Einbeziehung in einen erweiterten Maschensatz:
N
∑u
n =1
vzb
mit
Bemerkung: L
n
+L
uqifremd
di
− uqifremd = 0
dt
d ψfremd
= −
= −
dt
v
∂B v
∫A ∂ t dA
di
ist stets positiv in Richtung des Stromflusses
dt
(kein Vorzeichenproblem!)
25
3.3 Bewegungsinduktion
3.3.1 Erläuterung zur Bewegungsinduktion
Ausgehend von der allgemeinen Form des Induktionsgesetzes gemäß Gl.
(3.1.1) betrachten wir jetzt die Möglichkeit der Spannungsinduktion, d.h.
eine zeitliche Änderung des mit einer Schleife verketteten magnetischen
Flusses ( dψ / dt ) zu erreichen, wenn die geschlossene Kontur nicht ruht.
Um den im Abschn. 3.2 betrachteten Anteil der Ruheinduktion zunächst
auszuschließen, muss der Ausdruck
r
∂B r
∫A ∂ t dA = 0
(3.3.1)
r
r
werden, d.h. das Magnetfeld B muss zeitlich konstant sein ((∂B / ∂t) = 0) .
Die sich so ergebende Möglichkeit zur Induktion nennen wir Bewegungsinduktion (auch motorische Induktion, engl.: motional induction) und
kennzeichnen dies durch den Index m.
Wegen
r
r
r r
dψ d
=
B
∫ dA =
dt dt A(t)
∂B r
∫A ∂ t dA
(t)
1
424
3
+
r ∂(dA)
B
∫ ∂t
A( t )
(3.3.2)
= 0,wegen Gl. (3.3.1)
und der Gültigkeit
r
r ∂(dA)
r r r
=
−
B
(v
∫A
Ñs∫ × B ) d s
∂
t
(t)
(t)
(3.3.3)
(der mathematische Beweis für Gl. (3.3.3) wird im Anhang erbracht; für
elektrisch leitende Konturen (Leiterschleifen) wird nachfolgend Gl. (3.3.3)
sehr einfach und anschaulich über die Lorentzkraft hergeleitet)
erhält das Gesetz der Bewegungsinduktion die Form
r r
u im= Ñ∫ Emd s = −
s( t )
r
r ∂(dA)
v r r
dψ
∫A B ∂ t = +sÑ∫ (v × B ) d s = − d t .
(t)
(t)
(3.3.4)
Dabei bedeuten:
uim
in der bewegten Kontur s auftretende induzierte Urspannung
r
Em
in der bewegten Kontur s gemessene elektrische Feldstärke,
26
wobei gilt:
r
r
r
Em = Eq + Eim
(3.3.5)
r
Dabei ist Eim die in der bewegten Kontur sm induzierte elektrische Feldstärke, für die gilt
r
r r
Eim = v × B
(3.3.6)
r
Eq ist eine auch ohne Bewegungsinduktion vorhandene (wirbelfreie) Feldr r
stärke, für die gilt Ñ
E
∫ qds = 0 , wie dies bereits im Zusammenhang mit der
s( t )
Ruheinduktion ausführlich erläutert wurde.
r
r
v ist die Geschwindigkeit des Elements ds der bewegten Kontur relativ
zum Magnetfeld, die im Allgemeinen orts- und zeitabhängig ist. Hieraus
ergeben sich verschiedene Möglichkeiten, wie Bewegungen zu einer zeitlichen Veränderung der Flussverkettung und damit zur Bewegungsinduktion führen können:
§
§
eine starre Kontur bewegt sich mit einer Geschwindigr
keit v im Magnetfeld,
eine Kontur verändert ihre Form oder ihre gestreckte
Länge.
(Der Vollständigkeit halber soll hier erwähnt werden, dass
r
stets die Bedingung v << c , wenn c die Lichtgeschwindigkeit
ist, gelten muss.)
Ist die bewegte Kontur s eine Leiterschleife,
Bewegungsinduktion aus der Lorentzkraft
v
r r
Fm = Q(v × B) ,
erklären und ableiten.
27
so
kann
man
(3.3.7)
die
r
Fm ist die Kraft, die auf die Ladung Q auf Grund ihrer Bewegung mit der
r
r
r
Geschwindigkeit v relativ zum Magnetfeld B wirkt. Die Richtung von Fm ist
über das Kreuzprodukt eindeutig definiert (s. Bild 3.3.1)
Bild 3.3.1
In einem mit der Ladung Q bewegten Koordinatensystem ist die
Geschwindigkeit der Ladung Null und die Kraftwirkung ist erklärbar als
Kraftwirkung im elektrischen Feld
r
r
Fm = QEim ,
(3.3.8)
r
wobei Eim eine auf Grund der Bewegung induzierte elektrische Feldstärke
ist, für die aus dem Vergleich von Gl. (3.3.7) und (3.3.8) gelten muss
r
r r
Eim = v × B .
(3.3.9)
r
r
Wird rein differentielles Leitstück ds mit der Geschwindigkeit v im Magnetfeld
B bewegt, so wirkt auf die freien Ladungsträger eine Kraft in Richtung
r
E im , die zur Ladungstrennung führt und Ursache der induzierten elektrischen Urspannung duim ist:
r r
r r r
du im = E imd s = (v × B) d s .
Die in der gesamten Leiterschleife auf Grund der Bewegung der einzelnen
Elemente induzierte Urspannung beträgt dann
u im=
Ñ∫
s(t)
(vergl. Gl. (3.3.4))
28
v
v
Eim ds =
Ñ∫
s(t)
r r r
(v × B)ds
.
(3.3.10)
Zur Unterstützung des elementaren physikalischen Verständnisses der
Bewegungsinduktion betrachten wir einen geradlinigen Stab der Länge l ,
r
der sich mit konstanter Geschwindigkeit v relativ zu einem homogenen
Magnetfeld bewegt (Bild 3.3.2a).
σ
Bild 3.3.2a Anordnung
Bild 3.3.2b Verhältnisse ohne Stromfluss
29
Bild 3.3.2 Verhältnisse bei Stromfluss
Auf
r die mitr dem Leiterstück bewegten Ladungen wirkt die Lorentzkraft
r
Fm = Q(v × B) und führt zu einer Ladungstrennung. An den Enden des
Stabes sammeln sich positive bzw. negative Ladungen an. In einem mit
dem Leiterstück bewegten Koordinatensystem, in dem die Geschwindigkeit der Ladung Null ist, wird diese Kraftwirkung als die Wirkung einer
elektrischen Feldstärke auf die Ladung Q wahrgenommen. Die elektrische
Feldstärke im bewegten Koordinatensystem nennen wir induzierte elek-
r
trische Feldstärke Eim . Es gilt
r
r
r r
Fm = QEim = Q(v × B)
und damit r
r r
Eim = v × B .
Durch
entsteht eine anziehende Coulombkraft
r
rdie Ladungstrennung
r
Fq = Q Eq , die der Kraft Fm entgegen wirkt. Der Gleichgewichtszustand (der
sich nach sehr kurzer Relaxationszeit einstellt) ist dadurch gekennzeichnet, dass die resultierende Kraft auf die Ladungen Null ist (s. Bild
3.3.2b):
r r
r
r
r
r
F = Fm + Fq = Q E = Q Eim + QEq = 0 ,
also muss gelten
r r
r
E = Eim + Eq = 0 ;
30
d.h. das Innere des Leiters ist im Falle ruhender Ladungen feldfrei (wäre
das nicht der Fall, würden noch Kräfte wirken und der Gleichgewichtszustand wäre noch nicht erreicht).
Wir bilden das Linienintegral über die elektrischen Feldstärken, um Spannungen zu erhalten:
r r 2r r
∫ Eimds + ∫ Eqds = 0
2
1
bzw.
1
r r 1r r
∫ Eimds = ∫ Eqds .
2
1
Dabei ist
2
r r
uim = ∫ Eimds
2
1
die im bewegten Leiterstück induzierte Urspannung und
r r
u21 = u = ∫ Eqds = uqim
1
2
der Spannungsabfall an den Klemmen, der bei Leerlauf (kein Stromfluss)
identisch zur Quellenspannung uqim ist (Bild 3.3.2b).
Wenn man den Stromkreis schließt, wird (wenn keine weiteren aktiven
Elemente eingeschaltet sind) in Richtung der induzierten Urspannung uim
ein Strom i angetrieben, d.h. das bisherige Gleichgewicht der Kräfte auf
die Ladungen wird gestört und es muss eine resultierende Kraftwirkung
bzw. Feldstärke auf die Ladungsträger geben (s. Bild 3.3.2c):
r
r r
r
J
E = Eim + Eq = ≠ 0 .
σ
(3.3.11)
Die resultierende Feldstärke muss im Differentiellen das Ohmsche Gesetz
(s. Gl. (3.3.11)) erfüllen und verursacht am endlichen Widerstand des
betrachteten Leiterstückes
einen Spannungsabfall
r
2 r
r 2r r
J
∫1 σ ds = ∫1 Eimds + ∫1 Eqds .
123 123 123
2
uR
uim
− u21
Diese Gleichung stellt den Maschensatz für die reale Spannungsquelle bei
Stromfluss dar (s. Bild 3.3.2c).
Die Darstellungen zeigen die elementaren Zusammenhänge, wie durch
Bewegungsinduktion eine reale Spannungsquelle mit Urspannung/
Quellenspannung und Innenwiderstand entsteht. Diese repräsentiert einen
31
Energiewandler, in dem Bewegungsenergie (mechanische Energie) mit
Hilfe des magnetischen Feldes in elektrische Energie umgewandelt wird
(sog. Dynamoprinzip).
32
3.3.1 Zusammenfassung und Handhabung des Gesetzes der Bewegungsinduktion
Das Gesetz für die Bewegungsinduktion lautet
r ur
r r ur
u im = Ñ∫ E d s = + Ñ∫ (v × B ) d s = −
s( t )
s( t )
Zur Berechnung der induzierten
Umlaufintegral entlang der Berandung
uim =
r
r ∂(dA)
dψ
B
=
−
. (3.3.11)
∫ ∂t
dt
A( t )
Urspannung
r r r
dψ
(v
Ñs∫ × B) d s = − dt
(t)
ist
entweder
ein
(3.3.12)
oder das Flächenintegral über eine bewegte Fläche
ur
r ∂(dA)
dψ
uim = − ∫ B
=−
∂t
dt
A( t )
(3.3.13)
zu berechnen.
Um dies zu berechnen,
müssen der bewegten Schleife s ein Umlaufsinn
r
(Richtung von ds ) und gemäß Rechtsschraubenregel das Flächenelement
ur
dA zugeordnet werden. Zusätzlich ist ein ruhendes Koordinatensystem
anzugeben, bezüglich dessen die Bewegung der Schleife beschrieben wird
(Bild 3.3.3).
Bild 3.3.3
Bild 3.3.3
33
In jedem Fall entspricht die induzierte Urspannung uim in der bewegten
Kontur der negativen zeitlichen Änderung des mit der bewegten Kontur
verketteten magnetischen Flusses (- dψ / dt ) unter Beachtung der
Bedingung Gl. (3.3.1).
Das Umlaufintegral entlang der bewegten Leiterschleife gemäß Gl.
(3.3.10) kann (wenn im speziellen Fall sinnvoll) in Teilabschnitte zerlegt
werden
uim
1
r 2 r r r 3 r r r
r
r r
r r
= Ñ∫ (v × B) ⋅ ds = ∫ (v × B) ⋅ds + ∫ (v × B) ⋅ds + ... + ∫ (v × B) ⋅ ds
s( t )
1
= uim12
2
+
n
uim23
+...+
, (3.3.14)
uimn,1
wobei die einzelnen Beiträge größer, kleiner oder gleich Null sein können.
Sind in die geschlossene, bewegte Leiterschleife konzentrierte Elemente
eingefügt (Spannungsquellen, Widerstände, offene Spannungsabfallstrecken, vergl. auch Ruheinduktion), so gilt
N
∑ un =
n =1
vzb
Ñ∫
r r r
(v × B) d s = uim
(3.3.15)
s( t )
mit uim als induzierte Urspannung bzw.
N
∑u
n =1
vzb
n
− uqim = 0
mit uqim als induzierte Quellenspannung.
34
(3.3.16)
Die Netzwerkdarstellung zu den Gln. (3.3.15) bzw. (3.3.16) zeigt Bild
3.3.4.
Bild 3.3.4
Dabei kann die Quelle uqim = uim gemäß Gl. (3.3.14) auch in mehrere Teilquellen zerlegt werden, die dann einzelnen Abschnitten der Leiterschleife
wie auch die übrigen Bauelemente konkret zugeordnet werden können.
Bemerkung: Da wir in diesem Abschnitt allein die Bewegungsinduktion
r
betrachten, darf keine Zeitabhängigkeit von B auftreten.
Dies kann im strengen Sinne nur garantiert werden, wenn
der Schleifenstrom i = 0 ist (Leerlauf) oder wenn der
Schleifenstrom ein Gleichstrom ist: i=I=const.
Andernfalls würde ein Selbstinduktionsvorgang stattfinden,
den wir hier aber voraussetzungsgemäß s. Gl. (3.3.1)
ausschließen und erst im Abschnitt 3.4 betrachten wollen.
35
3.3.3 Schritte für die Anwendung des Gesetzes der Bewegungsinduktion
Schritt 1: Zuordnung von Schleifenumlauf
und positivem Flächenelement
r
(in Richtung von Bbzw. ψ ) nach einer Rechtsschraube
und Zuordnung eines ruhenden Koordinatensystems
r r
Beschreibung von v , B , ds sowie dA
zur
Schritt 2: Aufstellen des Maschensatzes für die geschlossene Schleife
unter der Annahme, dass keine Induktionswirkung stattfindet
N
∑u
n =1
vzb
36
n
=0
Schritt 3: Ermittlung der induzierten Urspannung gemäß
uim =
Ñ∫
r r r
(v × B) d s
s(t)
bzw.
ur
r ∂(dA)
uim = − ∫ B
∂t
A( t )
unter Bezug auf das gewählte Koordinatensystem und die vorgegebene Umlaufrichtung.
Schritt 4: Einsetzen der Ergebnisse gemäß Schritt 2 und Schritt 3 in das
Gesetz in den erweiterten Maschensatz und Ermittlung der
gesuchten Größen (Strom, Spannungen).
r r r
+ Ñ∫ (v × B ) d s
s( t )
N
un = uim =
oder
∑
ur
n =1
r ∂(dA)
vzb
− B
A∫( t )
∂t
Ergänzung
Netzwerkinterpretation der induzierten Urspannung/ Quellenspannung und
Einbeziehung in den erweiterten Maschensatz (evtl. Aufteilung in mehrere
Quellen und Zuordnung zu den entsprechenden Abschnitten)
N
∑u
n =1
vzb
37
n
− u qim = 0
3.4 Der allgemeine Induktionsvorgang
3.4.1 Erläuterungen zum allgemeinen Induktionsvorgang
In unseren bisherigen Betrachtungen zur Ruheinduktion (Abschn. 3.2) und
zur Bewegungsinduktion (Abschn. 3.3) sind wir immer von Gl. (3.1.1)
ausgegangen und haben bestimmte Bedingungen formuliert, um die jeweilige Induktionsform gewissermaßen zu separieren.
Zusammenfassend kann man aber feststellen, dass die Gl. (3.1.1) das
vollständige Induktionsgesetz darstellt, auch für den Fall, dass sich die
Kontur s relativ zum Magnetfeld bewegt. Um dies bewusst auszudrücken,
können wir s durch s(t) sowie A durch A(t) ersetzen:
ui =
r r
r r
d
dψ
E
d
s
=
−
B
dA = −
∫s(t)
∫
Ñ
d t A(t)
dt
(3.4.1)
In jedem Falle ist die auch in einer bewegten Leiterschleife s(t) induzierte Urspannung ui(t) gleich der negativen zeitlichen Änderung des zum
Zeitpunkt t verketteten magnetischen Flusses ψ (t) .
Mit Hilfe der Identität (Ableitung s. Anhang)
r
r
r r
r ∂(dA)
d
∂B r
∫ B d A = − A(t)
∫ ∂ t d A − A(t)
∫ B ∂t
dt A(t)
r
r r r
∂B r
= −∫
d A + Ñ∫ v × B ds
∂t
A(t)
s(t)
(
(3.4.2)
)
können die im Allgemeinen gleichzeitig ablaufenden Vorgänge der Ruheund Bewegungsinduktion separiert dargestellt und berechnet werden.
Dabei sind:
s = s(t)
A = A(t)
ui (t)
r r
E (r , t )
ψ (t) =
∫
A(t)
v v
v (r,t)
38
bewegte, sich deformierende Kontur
zeitveränderliche, von s berandete Fläche
in der bewegten Kontur induzierte Urspannung
in der bewegten Kontur auftretende elektrische
r v
v Feldstärke
B(r,t)dA mit der bewegten Fläche A(t) zum Zeitpunkt t
v v
verkettete magnetische Fluss, wobei B(r,t) ein
im Allgemeinen zeit und ortsabhängiges
(inhomogenes) Magnetfeld darstellt.
die Relativgeschwindigkeit eines Linienelements
r
ds der Kontur bezüglich des Magnetfeldes.
Für den Fall, dass in der Kontur s kein Strom fließt, ist das die Induktion
bewirkende Magnetfeld ein von der Kontur völlig unabhängiges Fremdfeld.
Sobald in der Kontur s ein Strom fließt, wie es in sehr vielen praktischen
Anwendungen der Fall ist, wird dieses Fremdfeld durch das vom Stromfluss selbst erzeugte Magnetfeld überlagert.
Die gesamte zeitliche Änderung des im Induktionsgesetz wirksamen, verketteten magnetischen Flusses ergibt sich, wie bereits im Abschn. 3.2
dargelegt, zu
dψ fremd
dψ
=
dt
dt
+
dψ selbst
dt
(3.4.3)
mit
dψ selbst
d
=
(Li)
dt
dt
(3.4.4)
(L (Selbst-)Induktivität der Leiterschleife).
Betrachten wir den ersten Term auf der rechten Seite, der die Induktionswirkung durch das vorgegebene magnetische Fremdfeld
erfasst. Dieser
v
v
Term wird gemäß Gl. (3.4.2) behandelt, wobei für B gewissermaßen B fremd
einzusetzen ist, also das unabhängig vom Stromfluss in der Leiterschleife
vorgegebene Magnetfeld.
Der erste Term auf der rechten Seite von Gl. (3.4.2) ist die Berechnungsvorschrift für die durch transformatorische Induktion des Fremdfeldes induzierte Urspannung
u it, fremd
v
∂ Bfremd v
= − ∫
dA .
∂
t
A(t)
(3.4.5)
Der zweite Term auf der rechten Seite von Gl. (3.4.2) repräsentiert die
Berechnungsvorschrift für die durch Bewegungsinduktion im Fremdfeld
induzierte Urspannung
u im,fremd
v
v
∂ ( ∂ A)
= − ∫ B fremd
=
∂
t
A(t)
Ñ∫ (
s(t)
v v
v
v × B fremd d s
)
(3.4.6)
Je nach Aufgabenstellung können beide Ausdrücke auf der rechten Seite
von Gl. (3.4.6) nützlich für die Berechnung sein.
39
Für den Fall eines Stromflusses in der Leiterschleife müssen wir entsprechend Gl. (3.4.4) auch den Selbstinduktionsvorgang betrachten.
Ist die Leiterschleife starr, d. h. sie unterliegt keiner Deformation, ist die
Induktivität L eine Konstante bezüglich der Zeit und Gl. (3.4.4) kann geschrieben werden in der Form
dψ selbst
di
= L ,
dt
dt
(3.4.4a)
was (wie bereits im Abschn. 3.2 erläutert) als Spannungsabfall an der
Induktivität L der Leiterschleife zu interpretieren ist.
Ergänzung:
Lassen wir im allgemeinen Fall auch eine Deformation der Leiterschleife zu, so wird L = L(t) und aus Gl. (3.4.4) ergibt sich dann
dψ selbst
d
di
dL
=
( L i ) = L(t)
+ i(t)
.
dt
dt
dt
dt
(3.4.4b)
Gl. (3.4.4b) lässt sich als Reihenschaltung zweier Spannungsabfälle interpretieren. Der erste Term auf der rechten Seite entspricht einem induktiven Spannungsabfall, allerdings im Unterschied zu Gl. (3.4.4a) jetzt an einer zeitveränderlichen Induktivität
L(t). Der zweite Term auf der rechten Seite entspricht einem
Spannungsabfall an einem im Allgemeinen zeitveränderlichen
Widerstand der Größe i dL / dt ([ dL / dt ] = Ohm ) .
Hier muss man sogar noch eine interessante Falluntersuchung vornehmen.
Wird die Induktivität bei der Deformation vergrößert, d. h. es gilt
(d L / d t ) > 0, dann ist der wirksame Widerstand positiv, was einen
Verlust elektrischer Energie in der Leiterschleife bedeutet.
Wird dagegen die Induktivität verkleinert, d. h. es gilt (d L / d t ) < 0,
dann wird der Widerstand negativ. Über einen solchen „negativen“
Widerstand wird der Leiterschleife zusätzlich Energie zugeführt
(der negative Widerstand wirkt wie eine Energiequelle).
Die mathematische Behandlung für den Fall zeitveränderlicher
Induktivitäten
führt
auf
Differentialgleichungen
mit
zeitveränderlichen Parametern.
Dieser Fall L=L(t) wird im Rahmen dieses Lernmoduls nicht weiter
verfolgt.
40
3.4.3 Schritte bei der Anwendung des Induktionsgesetzes in
allgemeiner Form
Schritt 1: Zuordnung von Schleifenumlauf
und positivem Flächenelement
v
(in Richtung von B bzw. ψ ) nach einer Rechtsschraube und
Zuordnung eines
ruhenden
Koordinatensystems zur Beschreiv
v v v
bung von v , B , ds und dA
Schritt 2: Aufstellen des Maschensatzes für die geschlossene Schleife unter der Annahme, dass keine Induktionswirkung stattfindet
(Annahme (dψ / dt) = 0 )
N
∑u
n =1
vzb
41
n
=0
Schritt 3:
Ermittlung der induzierten Urspannungsanteile gemäß
Gl. (3.4.3) ... Gl. (3.4.6)
Schritt 3.1:
Fremdinduktion
u i fremd = −
u it,fremd
uim,fremd
v
dψ fremd
d v
= −
B
d
A
dt
d t ∫A fremd
= u it,fremd
+ u im,fremd
v
∂ B fremd r
dA
= −∫
t
∂
A
v
v
∂ (dA)
− ∫ B fremd
∂t
A
=
oder
v
v v
+ Ñ∫ v × B fremd d s
s
(
Schritt 3.2:
)
Selbstinduktion
u i selbst = −
L:
d
di
(Li) = − L
= −u L
dt
dt
Selbstinduktivität der Leiterschleife; L=const.
Hinweis: Bei Leerlauf in der Leiterschleife i = 0 und bei
di
Gleichstrom
= 0 findet keine Selbstinduktion statt.
dt
Schritt 4: Einsetzen der Ergebnisse von Schritt 2 und 3 in den
erweiterten Maschensatz und Berechnung der gesuchten
Größen (Strom, Spannungen)
N
∑u
n =1
vzb
42
n
= ui = uit,fremd + uim,fremd + ui selbst
Ergänzung
Netzwerkinterpretation der durch die Induktionsvorgänge erzeugten
Spannungen als
Quellenspannungen bzw. Spannungsabfälle und
Einbeziehung in einen erweiteten Maschensatz
N
d
∑+ dt (Li) − u
n =1
vzb
qit,fremd
− uqim,fremd = 0
Elemente, die physisch in der Leiterschleife vorhanden sind und für die ohne Induktionsvorgang
N
der Maschensatz
∑u
n =1
vzb
n
= 0 gilt
Elemente, die die Induktionswirkung durch das
von der Leiterschleife unabhängige magnetische
Fremdfeld charakterisieren
Elemente, die den nur bei Stromfluss möglichen
Selbstinduktionsvorgang charakterisieren.
43
Anhang
Beweis der Identität
r
r r r
d r r
∂B r
B
dA
dA
(v
=
+
−
Ñ∫S × B)ds
∫A ∂ t
dt ∫A
Wir betrachten eine Bewegung und/oder eine Deformation der Kontur s
und die durch diese berandete
Fläche A. Das Magnetfeld sei zeitabhängig
r r
r
und inhomogen, also B = B(r,t) .
Auch für die Geschwindigkeitsvektoren der Linienelemente
r r r
Berandung gilt v = v(r,t) .
r
ds
der
Die Zeitänderung des verketteten magnetischen Flusses ist
r r
dΨ
d r r
1 r r
=
B d A = lim
B1 d A − ∫ B d A
∆ t → 0 ∆t ∫
dt
dt ∫A
A
A1
(1)
r
dabei ist B1 die Flussdichte zum Zeitpunkt t1 = t + ∆t . Außerdem gilt stets
(Quellenfreiheit der magnetischen Flussdichte)
r r
B
Ñ∫ d A = 0
(2)
für jede beliebige geschlossene Oberfläche.
Die Verhältnisse für eine sich bewegende Kontur s sind im Bild dargestellt.
44
Gl. (2) nimmt zum Zeitpunkt t1 = t + ∆t die Form an
r r
r r
− ∫ B1 d A + ∫ B 1 d A +
A
A1
r r
B
∫ 1 dA = 0 .
(3)
∆A
r
r
Ein Linienelement ds der Kontur s bewegt sich mit der Geschwindigkeit v
r
in der Zeit dt um das Wegstück dr :
r
r dr
v=
.
dt
Dieses sich bewegende Linienelement überstreicht eine Fläche
r
r
r
r r
dA = d s × d r = ds × v ∆t .
(4)
Damit kann der mit der Fläche ∆A verkettete Fluss berechnet werden:
r r
r
r r
B
dA
=
B
(ds
∫ 1
∫ 1 × v ) ∆t .
A1
(5)
A1
Der Integrand kann identisch umgewandelt werden (Spatprodukt):
r r
r r r
B1 (ds × v ) = (v × B)ds .
Setzt man dies in Gl. (5) ein, bekommt man
r r
r r
r
=∆
×
B
d
A
t
(v
B
)
d
s
.
1
1
∫
Ñ∫
∆A
(6)
s
r
Die magnetische Flussdichte B1 zur Zeit t1 kann für hinreichend kleine ∆t
folgendermaßen dargestellt werden:
r
r
r ∂B
B1 = B +
∆t + L .
∂t
(7)
Setzt man Gl. (7) in Gl. (6) ein und berücksichtigt die Reihe nur einschließlich des linearen Gliedes, erhält man:
r
r r
r
r r r
r
∂
B
2
B
dA
=
∆
t
(v
×
B)
d
s
+
(
∆
t)
v
×
ds.
1
∫
Ñ∫s
Ñ∫s
∂t
∆A
45
(8)
Nun kann man Gl. (3) folgendermaßen schreiben:
r
r
r r
r r
r
r r r
r
∂B r
∂
B
2
B
d
A
=
B
d
A
+
∆
t
dA
−
∆
t
(v
×
B)ds
−
(
∆
t)
v
×
d s .(9)
1
∫A
∫A
∫A ∂ t
Ñ∫s
Ñ∫s
∂
t
1
Diese Gl. (9) kann eingesetzt werden in Gl. (1), was zu der beweisenden
Identität führt:
r
r r
r r r
∂B r
d r r
1 r r
=
−
=
−
×B ds
B
d
A
lim
B
dA
B
d
A
d
A
v
1
∫
∫
∫
Ñ
∆t → 0 ∆t ∫
dt A∫
∂
t
A
s
A1
A
(
46
)