Grundlagen der elektronischen Messtechnik
Werbung

Grundlagen der elektronischen
Messtechnik - Praktikum
Aufgabenblätter
Prof. Dr.-Ing Clemens Gühmann,
Dipl.-Ing. Jürgen Funck
WS 2014/15
Technische Universität Berlin
Fakultät IV – Elektrotechnik und Informatik
Institut für Energie- und Automatisierungstechnik
Fachgebiet Elektronische Mess- und Diagnosetechnik
Inhaltsverzeichnis
1 Einführung in Scilab
1.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Theoretische Aufgaben . . . . . . . . . . . . . . . . . .
1.3 Praktische Aufgaben . . . . . . . . . . . . . . . . . . .
1.3.1 Datenerfassung mit der Messkarte NI USB-6009
1.3.2 Matrizen und lineare Gleichungssysteme . . . .
1.3.3 Selbstdefinierte Funktionen . . . . . . . . . . .
1.3.4 Grafiken . . . . . . . . . . . . . . . . . . . . . .
1.3.5 Simulation (Diese Aufgabe ist optional!) . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6
6
6
7
7
7
7
8
9
2 Messunsicherheit
2.1 Theoretische Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 Systematische Messabweichungen, zufällige Messabweichungen .
2.1.2 Zufallsexperiment, Zufallsvariable . . . . . . . . . . . . . . . . .
2.1.3 Messen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.4 Empirischer Mittelwert und empirische Varianz . . . . . . . . . .
2.1.5 Häufigkeit und Häufigkeitsverteilung . . . . . . . . . . . . . . .
2.1.6 Verteilungsdichte . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.7 Verteilungsfunktion . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.8 Gaußverteilung . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.9 Erwartungswert . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Praktische Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Bauteilstreuung . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.2 Mehrfachmessung einer Spannung! (230V AC) . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11
11
11
11
11
12
12
12
12
13
13
13
13
14
3 Regression und Interpolation
3.1 Theoretische Aufgaben . . . . . . .
3.1.1 Regression vs. Interpolation
3.1.2 Lineare Regression . . . . .
3.1.3 Interpolation . . . . . . . .
3.2 Praktische Aufgaben . . . . . . . .
3.2.1 Blackbox-Kennlinie . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
18
18
18
18
18
18
18
4 Strommessverfahren
4.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Theorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Der Shunt-Widerstand . . . . . . . . . . . . . . . . . .
4.2.2 Die Vierleitermessung . . . . . . . . . . . . . . . . . .
4.2.3 Die indirekte Strommessung über den Shunt-Widerstand
4.2.4 Der Kompensations-Stromwandler . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
20
20
20
20
21
21
22
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
WS 2014/15
Inhaltsverzeichnis
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
23
24
24
24
24
24
25
25
25
25
26
5 Eigenschaften von Messsystemen 1
5.1 Theorie . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.1 Die Grundbegriffe . . . . . . . . . . . . . . . . .
5.1.2 Das statische Verhalten von Messsystemen . . . .
5.1.3 Das dynamische Verhalten von Messsystemen . . .
5.1.4 Das Tiefpassfilter . . . . . . . . . . . . . . . . . .
5.2 Theoretische Aufgaben . . . . . . . . . . . . . . . . . . .
5.2.1 Das statisches Verhalten eines Tiefpassfilters . . .
5.2.2 Das dynamisches Verhalten eines Tiefpassfilters . .
5.3 Praktische Aufgaben . . . . . . . . . . . . . . . . . . . .
5.3.1 Das statische Verhalten eines Tiefpassfilters . . . .
5.3.2 Die Sprungantwort eines Tiefpassfilters 1. Ordnung
Literaturverzeichnis . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
27
28
28
29
31
34
40
40
40
40
40
41
45
4.3
4.4
4.2.5 Der Kompensations-Spannungswandler
Theoretische Aufgaben . . . . . . . . . . . . .
4.3.1 Die Widerstandsmessung . . . . . . . .
4.3.2 Die Strommessung . . . . . . . . . . .
4.3.3 Der Stromwandler . . . . . . . . . . .
4.3.4 Der Spannungswandler . . . . . . . . .
Praktische Aufgaben . . . . . . . . . . . . . .
4.4.1 Die Widerstandsmessung . . . . . . . .
4.4.2 Die indirekte Strommessung . . . . . .
4.4.3 Der Stromwandler . . . . . . . . . . .
4.4.4 Der Spannungswandler . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6 Die Eigenschaften von Messsystemen 2
6.1 Theorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.1 Das Bodediagramm . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.2 Die Übertragungsfunktion eines Tiefpassfilters 1. Ordnung . . . . . . .
6.1.3 Die Übertragungsfunktion eines Tiefpassfilters höherer Ordnung . . . .
6.2 Theoretische Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.1 Die Übertragungsfunktion eines Tiefpassfilters 1. Ordnung . . . . . . .
6.2.2 Die Übertragungsfunktion eines Tiefpassfilters höherer Ordnung . . . .
6.3 Praktische Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Die Simulation des Amplituden- und des Phasenganges eines Tiefpassfilters höherer Ordnung mit Scilab . . . . . . . . . . . . . . . . . . . .
6.3.2 Die Messtechnische Ermittlung des Amplituden- und des Phasenganges
eines Tiefpassfilters höherer Ordnung . . . . . . . . . . . . . . . . . .
6.3.3 Die Auswertung . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Literaturverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
46
46
47
49
53
53
53
54
7 Digitale Messkette 1
7.1 Theoretische Aufgaben . . . . . . . . .
7.1.1 Kennlinie eines ADU . . . . . .
7.1.2 Signal-Rausch-Verhältnis (SNR)
7.1.3 Quantisierungsrauschen . . . .
7.1.4 Clipping . . . . . . . . . . . .
57
57
57
57
57
57
WS 2014/15
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
54
55
55
56
3
Inhaltsverzeichnis
7.2
7.1.5 Abtastung (Sampling) . . . . . . . . . . .
Praktische Aufgaben . . . . . . . . . . . . . . . .
7.2.1 ADU-Kennlinie eines 4-Bit AD-Umsetzers
7.2.2 Clipping . . . . . . . . . . . . . . . . . .
7.2.3 Rauschen . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
57
58
58
58
58
8 Digitale Messkette 2
8.1 Theorie . . . . . . . . . . . . . . . . . . . .
8.1.1 Dual-Slope-Integrierer . . . . . . . .
8.1.2 Störspannungsdämpfung . . . . . . .
8.2 Theoretische Aufgaben . . . . . . . . . . . .
8.2.1 Aliasing . . . . . . . . . . . . . . . .
8.2.2 Entwurf eines Aliasing-Filters . . . .
8.2.3 DNL eines Analog-Digital-Umsetzers
8.2.4 INL eines Analog-Digital-Umsetzers
8.2.5 Störspannungsunterdrückung . . . . .
8.3 Praktische Aufgaben . . . . . . . . . . . . .
8.3.1 Aliasing . . . . . . . . . . . . . . . .
8.3.2 Aliasingfilter . . . . . . . . . . . . .
8.3.3 FFT-Analyse (optional) . . . . . . . .
8.3.4 ADU-Histogramm-Test . . . . . . . .
8.3.5 Störspannungsunterdrückung . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
60
60
60
61
63
64
64
64
64
64
65
65
65
66
66
66
9 Leistungsmessung 1
9.1 Einleitung . . . . . . . . . . . . . . . .
9.2 Theorie . . . . . . . . . . . . . . . . .
9.2.1 Messgrundlagen . . . . . . . .
9.2.2 Leuchtstoffröhre . . . . . . . .
9.2.3 Energiesparlampe . . . . . . . .
9.2.4 Dreiphasenverläufe . . . . . . .
9.3 Theoretische Aufgaben . . . . . . . . .
9.3.1 Leistungsdefinitionen . . . . . .
9.3.2 Leistungsfaktor . . . . . . . . .
9.3.3 Scheinleistungsmessung . . . .
9.3.4 Wirkleistungsmessung . . . . .
9.3.5 Blindleistungsmessung . . . . .
9.4 Praktische Aufgaben . . . . . . . . . .
9.4.1 Messung sinusförmiger Größen
9.5 Anhang . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
68
68
68
68
68
69
70
71
71
71
72
72
72
72
72
73
10 Leistungsmessung 2
10.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . .
10.2 Theorie . . . . . . . . . . . . . . . . . . . . . . . . . .
10.2.1 Dimmer . . . . . . . . . . . . . . . . . . . . . .
10.3 Theoretische Aufgaben . . . . . . . . . . . . . . . . . .
10.4 Praktische Aufgaben . . . . . . . . . . . . . . . . . . .
10.4.1 Aufnahme von Messwerten zur Leistungsanalyse
10.4.2 Auswertung der Messwerte . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
79
79
79
79
80
81
81
82
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
WS 2014/15
Inhaltsverzeichnis
10.5 Anhang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
11 Messbrücken
11.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.2 Theorie zur Impedanzmessung mit einer Wechselstrommessbrücke
11.2.1 Unsicherheitsrechnung . . . . . . . . . . . . . . . . . . .
11.2.2 Messbrückenaufbau, Bauteilwerte- und toleranzen . . . .
11.3 Theoretische Aufgaben . . . . . . . . . . . . . . . . . . . . . . .
11.3.1 Vergleich realer/idealer Kondensator . . . . . . . . . . . .
11.3.2 Kapazitätsmessung . . . . . . . . . . . . . . . . . . . . .
11.3.3 Abgleichbedingung . . . . . . . . . . . . . . . . . . . . .
11.3.4 Empfindlichkeit . . . . . . . . . . . . . . . . . . . . . . .
11.3.5 Fehler . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.4 Praktische Aufgaben . . . . . . . . . . . . . . . . . . . . . . . .
11.4.1 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.4.2 Empfindlichkeit und Eigenfehler . . . . . . . . . . . . . .
11.4.3 Kapazitätsmessung . . . . . . . . . . . . . . . . . . . . .
11.4.4 Fehlerbetrachtung . . . . . . . . . . . . . . . . . . . . .
11.5 Anhang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
12 Dehnungsmessstreifenbrücke
12.1 Einleitung . . . . . . . . . . . . .
12.2 Theorie zum Versuch . . . . . . .
12.2.1 Biegebalken . . . . . . . .
12.2.2 DMS-Brückenschaltungen
12.3 Theoretische Aufgaben . . . . . .
12.4 Praktische Aufgaben . . . . . . .
12.5 Anhang . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
94
. 94
. 94
. 94
. 95
. 99
. 99
. 100
WS 2014/15
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
84
84
84
85
85
86
86
86
86
86
87
87
87
88
88
88
89
5
1 Einführung in Scilab
Lernziele
• Grundkenntnisse im Umgang mit Scilab (und optional: Xcos) erarbeiten
• Erstellen eines kleinen Handbuchs für gängige Scilab-Funktionen
1.1 Einleitung
Ziel dieses Versuchs ist das Erlernen von Grundfunktionen in Scilab, die im Laufe der Labortermine immer wieder zum Einsatz kommen werden. Dazu ist für diesen Versuch kein klassisches
Protokoll zu erstellen, sondern eine Art Handbuch, die alle in diesem Laborversuch verwendeten Scilab-Funktionen enthält und beschreibt.
Benutzen Sie zur Beschreibung der Funktionen die bearbeiteten Aufgaben oder eigene Beispiele.
Das Handbuch soll im laufenden Laborbetrieb stetig mit neuen, nützlichen Funktionen erweitert
werden.
Hinweis: Die Theorie-Aufgaben sind nichtsdestotrotz vor dem Labortermin zu lösen und zum
Labortermin mitzubringen.
1.2 Theoretische Aufgaben
Mit welchen Scilab-Anweisungen können die nachfolgenden Aufgaben gelöst werden?
Hinweis: Die Aufgaben lassen sich alle mit Scilab-Befehlen lösen.
1. Wie können Vektoren generiert werden? Erzeugen Sie auf zwei verschiedene Weisen
einen Zeilenvektor x, dessen Elemente von 1 bis 1000 laufen.
2. Wie lässt sich dieser Vektor in einen Spaltenvektor y umwandeln?
3. Wie kann der Teilvektor von Index 10 bis Index 50 von x ausgeschnitten werden?
4. Bilden Sie das Skalarprodukt von x und y.
5. Wie können x und y elementweise miteinander multipliziert werden.
6. Bilden Sie die Summe aller Elemente des Vektors x.
7. Wie kann eine 3x4 Matrix mit gleich-verteilten Zufallszahlen zwischen 0 und 1 erzeugt
werden?
8. Wie kann zu dieser Matrix eine weitere Zeile hinzugefügt werden, die nur Einsen enthält?
9. Wie lässt sich die Inverse und die Determinante dieser Matrix berechnen?.
10. Erzeugen sie eine Periode eines Sinus-Signals mit einer Frequenz von 50Hz und einer
Amplitude von 5V. Das Signal sollte für eine gute Auflösung mindestens 30 Stützstellen
6
WS 2014/15
1.3 Praktische Aufgaben
aufweisen. Wie kann man in Scilab die Zeit bestimmen bei der das erzeugte Sinus-Signal
seinen Maximalwert annimmt?
11. Wie kann man Datensätze in Scilab speichern und laden? Testen Sie die Befehle, in dem
Sie u_sin in einem Datensatz speichern. Zur Probe löschen Sie ihren Workspace mit dem
Befehl clear und laden Sie den Datensatz erneut in den Workspace.
12. Wie kann ein Scilab-Graphikfenster in zwei „Unterfenster“ aufgeteilt werden? Wie können die Achsen beschriftet und ein Koordinatengitter erstellt werden?
13. Was macht der Scilab-Befehl xs2pdf ?
14. Laden Sie von der MDT-Website:
http://www.mdt.tu-berlin.de/menue/lehre/mt1/praktikum/
das Paket MDT_Funktionen.zip herunter.
Binden Sie die MDT-Funktionen in MDT_Funktionen.zip nach Anleitung ein. Machen
Sie sich mit der Funktion mdt_dataread vertraut, indem Sie mdt_dataread in die ScilabKonsole eingeben.
1.3 Praktische Aufgaben
1.3.1 Datenerfassung mit der Messkarte NI USB-6009
Generieren Sie mit Frequenzgenerator einen Sinus mit einer Amplitude von 5V und einer Frequenz von 50Hz.
Messen Sie mit der Messkarte NI USB-6009 das Signal. Wählen Sie die Parameter von mdt_dataread
so aus, dass sie mindestens eine vollständige Periode aus dem gemessenen Signal erhalten.
Speichern Sie anschließend Signal in einen Datensatz zur Weiterverarbeitung ab.
• Schneiden Sie mit Scilab eine vollständige Periode des Sinus aus.
• Stellen Sie das gemessene und das ausgeschnittene Signal in jeweils einem Unterfenster
dar.
1.3.2 Matrizen und lineare Gleichungssysteme
Es wird angenommen, dass die Stellung eines Kfz-Fahrpedals durch einen Spannungswert zwischen 3.1 und 0.45 V wiedergegeben wird. Die kleinere Spannung entspricht dabei einem Winkel
von 35◦ und die größere Spannung einem Winkel von 0◦ . Bestimmen Sie die Spannung als
Funktion der Winkelstellung. Nehmen Sie dazu eine lineare Beziehung an.
Hinweis: Stellen Sie das lineare Gleichungssystem auf und verwenden Sie Scilab zur Berechnung der gesuchten Parameter.
1.3.3 Selbstdefinierte Funktionen
Schreiben Sie eine Funktion angle2voltage, mit der Sie eine Winkelstellung in eine Spannung
umrechnen. Überprüfen Sie Ihre Funktion, indem Sie die Winkel 0◦ und 35◦ eingeben.
WS 2014/15
7
1 Einführung in Scilab
1.3.4 Grafiken
Das Fahrpedal wird nun betätigt. Die Veränderung der Winkelstellung angle über der Zeit t
soll mit Hilfe der Funktion angle(t) = 1/2 · (tanh(t − 5) + 1) · 35 simuliert werden. Plotten Sie
den Verlauf der Funktion im Bereich t ∈ [0, 10]s. Stellen Sie weiterhin den zugehörigen Verlauf
der Spannung im gleichen Graphikfenster dar. Beschriften Sie die Achsen und fügen Sie eine
Legende ein.
8
WS 2014/15
1.3 Praktische Aufgaben
1.3.5 Simulation (Diese Aufgabe ist optional!)
Die Winkel-Spannungs-Beziehung aus Aufgabe 1.3.2 soll nun noch einmal mit Hilfe einer
Xcos-Simulation dargestellt werden, um das Arbeiten mit Xcos kennenzulernen. Gehen Sie
dazu folgender Maßen vor:
Öffnen Sie Scilab und aktivieren Sie Xcos über das Drop-Down-Menü ’Applikation’ -> ’Xcos’.
Für die Simulation werden acht Xcos-Blöcke benötigt, welche Sie über das Menü View ->
’Palette Browser’ finden.
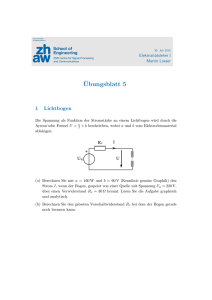
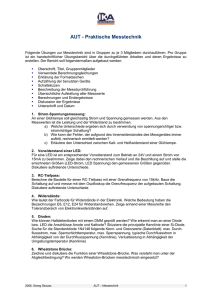
Das Blockschaltbild der Xcos-Simulation sieht folgender Maßen aus:
Bild 1.1: Blockschaltbild der Xcos-Simulation
Aktivieren Sie nach Verbindung der einzelnen Xcos-Blöcke unter dem Drop-Down-Menü ’Simulate’ -> ’Run’ die Simulation.
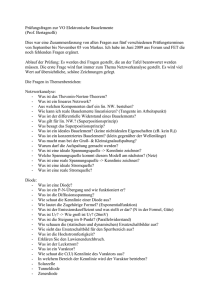
Um ein Plot wie in Bild 1.3.5 zu bekommen, müssen vereinzelte Parameter der Xcos-Blöcke
entsprechend eingestellt werden, sowie ein ’Simulation’->’Setup’ durchgeführt werden. Achten
Sie bei den ’Set Block properties’ darauf, dass die Frequenzen in [ rad
s ] statt in [Hz] berechnet
werden müssen. Folgende Standardparameter sind zu ändern:
1. ’Simulation’ → ’Setup’ → ’Set parameters’
a) ’Final Integration time’-> ’1’
2. ’Palettes’ → ’Sources’ → ’sinusoid generator’ → ’GENSIN_f Block’
Set Gen_SIN block:
a) ’Magnitude’-> ’1.33’
b) ’Frequency’-> ’6.28’
c) ’phase’-> ’-1.5’
3. ’Palettes’ → ’Sources’ → ’1’ → ’CONST_m Block’
Set Constant block:
a) ’Constant’-> ’1.78’
4. ’Palettes’ → ’Mathematical operations’ → ’Sum’ → ’BIGSOM_f Block’
5. ’Palettes’ → ’User-Defined Function’ → ’Mathematical Expressions’ → ’EXPRESSION
block’
WS 2014/15
9
1 Einführung in Scilab
Set block properties:
a) ’number of inputs’ -> ’1’
b) ’scilab expression’ -> ’m · u1 + n’
6. ’Palettes’ → ’Signal Routing’ → ’Mux’ → ’MUX Block’
7. ’Palettes’ → ’Sinks’ → ’Single Display Scope’ → ’CFSCOPE Block’
Set Scope parameters:
a) ’Ymin’ -> ’-5’
b) ’Ymax’ -> ’40’
c) ’Refresh period’-> ’1’
d) ’Buffer size’ -> ’1000’
e) ” -> ”
8. ’Palettes’ → ’ Sink’ → ’Activation clock’ → ’CLOCK_c block’
properties:
Set Clock Block
a) ’Period’ -> ’0.0005’
b) ’Init time’ -> ’0.000’
Graphic 1
40
35
30
25
y
20
15
10
5
0
-5
0.0
0.1
0.2
0.3
0.4
0.5
t
0.6
0.7
0.8
0.9
1.0
Bild 1.2: Plot der Xcos-Simulation
10
WS 2014/15
2 Messunsicherheit
Lernziele
• Grundbegriffe der Statistik (Mittelwert, Standardabweichung, Verteilungsfunktion und dichte, Varianz, Erwartungswert, Histogramm, Vertrauensbereich)
• Angabe des vollständigen Messergebnisses
HINWEIS: Bitte bringen Sie pro Gruppe mindestens einen USB-Stick mit! Dieser wird
für die Messungen im praktischen Teil benötigt!
2.1 Theoretische Aufgaben
2.1.1 Systematische Messabweichungen, zufällige Messabweichungen
Worin unterscheiden sich zufällige und systematische Messabweichungen bezüglich ihrer Ursachen und Beschreibungen?
2.1.2 Zufallsexperiment, Zufallsvariable
Was verstehen Sie unter den Begriffen Zufallsexperiment und Zufallsvariable?
2.1.3 Messen
Angenommen, eine Messgröße wird als Zufallsvariable interpretiert, ist dann die zeitliche Reihenfolge bei mehreren Messungen von Bedeutung? Begründen Sie ihre Antwort!
Beispieldatensatz:
Zur Veranschaulichung der statistischen Größen wurde eine Messung von 12 Widerständen
mithilfe eines Digitalmultimeters im Widerstandsmodus durchgeführt.
Index
Widerstand [Ω]
1
998
2
1002
3
1002
4
997
5
1000
6
997
7
997
8
1007
9
998
10
1001
11
997
Tabelle 2.1: Messwerte
WS 2014/15
11
12
997
2 Messunsicherheit
2.1.4 Empirischer Mittelwert und empirische Varianz
Welche Bedeutung haben der empirische Mittelwert und die empirische Varianz? Berechnen
Sie für den Beispieldatensatz den empirischen Mittelwert und die empirische Varianz. Was ist
die Standardabweichung?
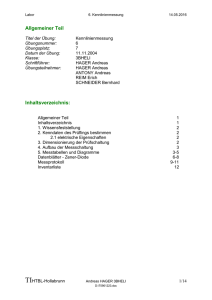
2.1.5 Häufigkeit und Häufigkeitsverteilung
5
0
990
1000
1010
Wert der Messgröße
Relative Häufigkeit - Histogramm
- 11 Klassen
1
0.5
0
990
1000
1010
Wert der Messgröße
Anzahl der Messwerte
Absolute Häufigkeit - 11 Klassen
10
Anzahl der Messwerte
Anzahl der Messwerte
Anzahl der Messwerte
Was versteht man unter den Begriffen „absolute“ und „relative Häufigkeit“? Wie bekommt man
eine absolute und relative Häufigkeitsverteilung aus dem Beispieldatensatz? Was ist ein Histogramm?
Absolute Häufigkeit - 4 Klassen
10
5
0
990
1000
1010
Wert der Messgröße
Relative Häufigkeit - Histogramm
- 4 Klassen
1
0.5
0
990
1000
1010
Wert der Messgröße
Bild 2.1: absolute und relative Häufigkeitsverteilung zum gegebenen Datensatz
2.1.6 Verteilungsdichte
Was ist eine Verteilungsdichte (Wahrscheinlichkeitsverteilung)? Bitte betrachten Sie den diskreten
und den stetigen Fall.
2.1.7 Verteilungsfunktion
Wie kann die Verteilungsfunktion aus der Verteilungsdichte berechnet werden?
12
WS 2014/15
2.2 Praktische Aufgaben
2.1.8 Gaußverteilung
Wie ist die Gaußverteilung definiert? Worin liegt ihre Bedeutung? Was ist nötig, um den Beispieldatensatz so gut wie möglich mit einer Gaußverteilung zu beschreiben?
2.1.9 Erwartungswert
Was bedeutet in der Statistik der Erwartungswert? Wie kann man den Erwartungswert aus der
Wahrscheinlichkeitsverteilung (z.B.: Gaußverteilung) bestimmen?
2.2 Praktische Aufgaben
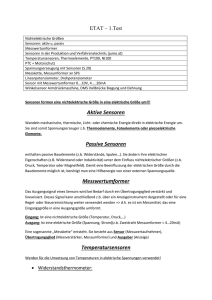
2.2.1 Bauteilstreuung
Messen Sie den Widerstand von 50 verschiedenen Widerstandsbauelementen der gleichen Produktionscharge mit einem Multimeter. Sie können dazu die Widerstandshalterung (die Box mit
den beiden Krokodilklemmen auf der Oberseite) verwenden. Die interne Verschaltung der Box
ist in Abbildung 2.2 dargestellt.
Geräteliste:
• Multimeter
• Widerstandshalterung
Blau
Blau
Blau
Rot
Rot
100Ω
Grün
Bild 2.2: Die interne Verschaltung der Widerstandshalterung.
Häufigkeitsverteilungen
Stellen Sie die absolute und die „renormierte“ (Fläche auf Eins normiert) Häufigkeitsverteilung
des Datensatzes D = {R1 , . . . , R50 } dar.
WS 2014/15
13
2 Messunsicherheit
Verteilungsparameter
Berechnen Sie den empirischen Mittelwert und die empirische Standardabweichung ihrer Daten.
Gaußverteilung
Plotten Sie die passende Gaußverteilung in das Fenster der „renormierten“ Häufigkeitsverteilung
und vergleichen Sie!
2.2.2 Mehrfachmessung einer Spannung! (230V AC)
Geräte- und Materialliste:
Ab jetzt nur noch berührungssichere Messleitungen am Messplatz
verwenden.
• Leistungsmessbrett (Aufbau in Abschnitt 9.5 auf Seite 73)
• Berührungssichere Kabel
• Fluke 8846
• (mitgebrachter) USB-Stick
Nehmen Sie mit dem Fluke 3000 Messwerte der Effektivspannung der 230 V Netzspannung
auf. Messen Sie dazu die Spannung einer Phase (L1-N) über das Leistungsmessbrett (Aufbau
in Abschnitt 9.5 auf Seite 73) und verwenden Sie für die Zuleitung nur berührungssichere
Messleitungen. Speichern Sie die aufgenommenen Effektivwerte der Messung auf Ihrem USBStick. Wählen Sie dazu am Fluke „MEMORY“ aus, siehe runde Markierung in Abbildung 2.3.
14
WS 2014/15
2.2 Praktische Aufgaben
Bild 2.3: Frontpanel des Fluke 8846a, Quelle:www.fluke.com
Bild 2.4: MEMORY- Menü, Quelle:www.fluke.com
In dem folgenden Menüfenster 2.4 navigieren Sie zu „Store Readings“. Nun befinden Sie sich
im Menü zur Speichereinstellung der Messdaten. Unter „Samples“ können Sie die Anzahl der
zu speichernden Messpunkte einstellen. Wählen Sie 3000 Samples und bestätigen Sie ihre
Eingabe mit „Enter“. Mit der Wahl vom Menüpunkt „USB“ legen Sie den USB-Stick als Speicherplatz für die Messdaten fest. Die Daten werden auf Ihrem USB-Stick in dem Ordner
„\fluke884\meas\meas00xx.csv“ gespeichert. In Scilab können Sie über folgenden Code auf
die Messdaten UG zugreifen:
Listing 2.1: Scilab-Code zum Auslesen der Messwerte
1
2
3
4
temp= c s v R e a d ( " D a t e i p f a d \ meas0001 . c s v " , a s c i i ( 9 ) , ’ . ’ , ’ s t r i n g ’ , [ ’ , ’ ’ ’ ] ) ;
/ / t e m p o r ä r e r ( S t r i n g −) V e k t o r
temp ( 1 , : ) = [ ] ; / / E n t f e r n e n d e r e r s t e n und l e t z t e n Z e i l e d e r csv−d a t e i
temp ( s i z e ( temp , " r " ) , : ) = [ ] ;
U_G= s t r t o d ( temp ) / / V e k t o r m i t E f f e k t i v s p a n n u n g
WS 2014/15
15
2 Messunsicherheit
Empirische Häufigkeitsverteilung und Normalverteilung
Stellen Sie von den aufgenommenen Messdaten UG die emprische renormierte Häufigkeitsverteilung
mit Scilab dar. Berechnen Sie für den Datensatz den empirischen Mittelwert und die empirische
Standardabweichung und benutzen diese als Schätzparameter für die Normalverteilung. Stellen
Sie diese geschätzte Normalverteilung in dem gleichem Grafikfenster wie die Häufigkeitsverteilung
dar.
Was beobachten Sie bei diesem Messversuch und welches Fazit können Sie aus dieser Messung
ableiten?
Zeitverlauf der Effektivspannungen
Was könnte die Ursache für etwaige Abweichungen der empirischen Häufigkeitsverteilung von
der geschätzten Normalverteilung sein? Plotten Sie hierzu den zeitlichen Verlauf der Effektivspannung, es ist ausreichend hier die Spannungswerte über die Messpunkte (engl. Samples)
aufzutragen.
Was für Bereiche können Sie ausmachen? Vergleichen Sie ihre über die Messpunkte dargestellten Messdaten mit dem der Häufigkeitsverteilung, was können Sie den Ergebnissen entnehmen?
Empirische Häufigkeitsverteilung und Normalverteilung für die stationären
Bereiche
Schneiden Sie aus dem Gesamtdatensatz UG mindestens einen stationären Teil des Spannungsverlaufs Ust, j , j = 1, 2, ..., aus (mit mindestens Nst, j ≥ 500 Messpunkten) und bestimmen Sie dafür
die empirische Häufigkeitsverteilung und die geschätzte Normalverteilung. Was stellen Sie fest,
wenn Sie die stationären Messdaten Ust, j im Vergleich zu der vorangegangenen statistischen
Messdatenauswertung von UG analysieren?
Messunsicherheit einer stationären Effektivspannung
Geben Sie für mindestens eine Stichprobe Ust, j das vollständige Messergebnis bestehend aus
dem empirischen Mittelwert und der Messunsicherheit an. Bestimmen Sie zunächst die Genauigkeit
G j des Fluke 8846A Voltmeter für die betrachtete Stichprobe Ust, j . Mit der Ganauigkeit bestimmen Sie die systematische Messunsicherheit u j der Messung. Die statistische Sicherheit der
Angaben zur Messabweichung des Geräts beträgt P = 0, 99, dies entspricht einem k = 2, 6fachen der Standardabweichung. Die Messgenauigkeit des Messgeräts ist analog der Vorlesung
dem Ausschnitt in Abb. 2.5 zu entnehmen.
16
WS 2014/15
2.2 Praktische Aufgaben
Bild 2.5: Auszug (S. 1-143) aus: Bedienungshandbuch 8845A/ 8846A Digital Multimeter Fluke
WS 2014/15
17
3 Regression und Interpolation
Lernziele
• Regression
• lineare Interpolation
• Spline-Interpolation
3.1 Theoretische Aufgaben
3.1.1 Regression vs. Interpolation
Worin besteht der Unterschied zwischen Interpolation und Regression?
3.1.2 Lineare Regression
Führen Sie mit den folgenden Werten eine lineare Regression durch, wobei die Gerade mittels
der Methode der kleinsten Quadrate geschätzt werden soll!
x
y
-1
-0,5
0
0,1
1
1,2
2
3
3.1.3 Interpolation
Erklären Sie bitte den Begriff Spline-Interpolation!
3.2 Praktische Aufgaben
3.2.1 Blackbox-Kennlinie
In dieser Aufgabe soll die nichtlineare Eingangs-/Ausgangsspannungs-Kennlinie einer Blackbox bestimmt werden. Die Schaltung der “Black”-Box ist in Abbildung 3.1 dargestellt.
Messung
Verdeutlichen Sie sich zunächst den prinzipiellen Verlauf der Kennlinie, indem Sie sich die
Ausgangsspannung zu einer sinusförmigen Eingangsspannung mit dem Oszilloskop im XYBetrieb darstellen lassen. Der Eingangsspannungsbereich sei ±15V .
18
WS 2014/15
3.2 Praktische Aufgaben
270Ω
Ux
1N4148
Uy
270Ω
PZD27
Bild 3.1: Schaltung der Blackbox.
Messen Sie nun die Spannungsänderung der Ausgangsspannung Uy an der Blackbox bei einer sich ändernden Eingangsspannung Ux ∈ [−15V, 15V ] und nehmen Sie mindestens 20 gut
gewählte Wertepaare mit dem Multimeter auf.
Regressionspolynome
Interpolieren sie die Daten mit Hilfe von Regressionspolynomen. Dazu steht Ihnen die Funktion
mdt_regression zur Verfügung. Variieren Sie den Grad des Polynoms.
Kubische Splines
Interpolieren Sie die Daten nun mit Hilfe kubischer Splines. Verwenden Sie dazu die SciLabFunktion mdt_kubicspline. Interpretieren Sie das Ergebnis. Wie verändert sich der Plot, wenn
nur jeder zweite Messpunkt verwendet wird?
WS 2014/15
19
4 Strommessverfahren
Gliederung
• Die Zweileiter und die Vierleiter-Widerstandsmessung
• Die indirekte Strom- und Spannungsmessung mittels Shuntwiderstand
• Die Messung von Spannung und Strom mittels eines Spannungs- und Stromwandlers
nach dem Kompensationsprinzip
Lernziele
• Der Umgang mit dem Fluke-Tischmultimeter
• Der Umgang mit der Hameg-Gleichspannungsquelle
• Der Umgang mit Scilab
– Das Plotten von Kennlinien
4.1 Einleitung
Es ist grundsätzlich nicht möglich, fehlerfrei zu messen. Durch eine Vielzahl von Ursachen wird
die zu messende Größe nicht korrekt erfasst. Die Abweichung eines aus Messungen gewonnenen
Wertes vom wahren Wert der Messgröße wird Messabweichung oder Messfehler genannt.
Bei einer Messung darf das Messobjekt möglichst wenig gestört werden. Während einer Messung fließt nicht nur ein Informationsfluss vom Messobjekt zum Messgerät, sondern stets auch
ein Energiefluss. Aus diesem Grund muss die Kopplung zwischen Messobjekt und Messgerät
möglichst gering sein, oder aber die Abweichung muss ermittelt und der Messwert dementsprechend
korrigiert werden.
Das Messen: Eine Messung ist ein experimenteller Vorgang, durch den ein spezieller Wert
einer physikalischen Größe als Vielfaches einer Einheit oder eines Bezugswertes ermittelt
wird.
4.2 Theorie
4.2.1 Der Shunt-Widerstand
Ein Shunt-Widerstand ist ein hochpräziser Normwiderstand mit sehr kleinem Widerstandswert.
Er wird häufig zur Messung von großen Strömen verwendet.
20
WS 2014/15
4.2 Theorie
4.2.2 Die Vierleitermessung
Bei der Vierleiter-Widerstandsmessung erfolgt die Stormzufuhr und Spannungsmessung über
zwei getrennte Leiter.
Ein Leiter wird für den bekannten Speisestrom genutzt, der andere für die Spannungsmessung
(siehe Abbildung 4.1). Die Kontakte und Zuleitungen werden weiterhin vom Speisestrom durchflossen. Da aber durch das Voltmeter ein viel kleinerer Strom fließt als durch das Messobjekt,
gibt es sehr viel kleinere Spannungsabfälle an den Leitungswiderständen der Spannungsmessung. Die Leitungswiderstände haben somit einen geringeren Einfluss auf die Messung.
Bild 4.1: Das Prinzipschaltbild der Vierleitermessung
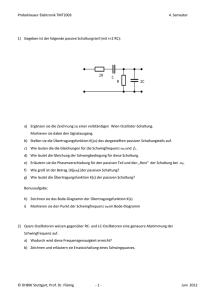
4.2.3 Die indirekte Strommessung über den Shunt-Widerstand
Ein Shunt-Widerstand wurde in Reihe zwischen den Verbraucher und die Spannungsquelle
eingesetzt. Dieser hat die Eigenschaft, dass sein Widerstand sehr klein und konstant ist und
so über die Spannungsmessung der absolut proportionale Stromwert errechnet werden kann.
Die verwendete Glühlampe verbraucht 21 W und soll mit einer Spannung von 12 V betrieben
werden (siehe Abbildung 4.2)
Bild 4.2: Das Schaltbild der Vierleitermessung
WS 2014/15
21
4 Strommessverfahren
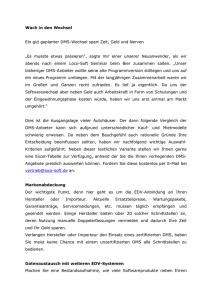
4.2.4 Der Kompensations-Stromwandler
Wird auch als “Closed loop - hall effect current transducers “ bezeichnet.
Das Funktionsprinzip:
Bild 4.3: Das Funktionsprinzip des Stromwandlers
Der durch den Primärstrom IP erzeugte Magnetfluss wird mit Hilfe einer Sekundärspule kompensiert, wobei ein Hall-Sensor mit zugehöriger Elektronik-Schaltung verwendet wird. Der
sekundärseitige Kompensationsstrom ist ein exaktes Abbild des Primärstroms (siehe Abbildung 4.3).
Die Merkmale:
• großer Frequenzbereich
• hohe Gesamtgenauigkeit
• kurze Ansprechzeit
• geringe Temperaturdrift
• hervorragende Linearität
• keine Einfügungsverluste
Im Labor wird ein Stromwandler vom Typ „LEM LA 25-NP/SP11“ verwendet. Die Beschaltung
des Stromwandlers wurde so ausgelegt, dass beim maximalem(!) Messstrom von ±0, 9 A am
Signalausgang (gefiltert und ungefiltert) eine Signalspannung von ±10 V ausgegeben wird.
22
WS 2014/15
4.2 Theorie
4.2.5 Der Kompensations-Spannungswandler
Wird auch als “Closed loop - hall effect voltage transducers“ bezeichnet.
Das Funktionsprinzip
Bild 4.4: Das Funktionsprinzip des Spannungswandlers
Von der zu messenden Spannung wird ein sehr kleiner Strom von wenigen Milliampère abgegriffen und durch eine Primärspule geführt. Der durch diesen Primärstrom IP erzeugte Magnetfluss wird mit Hilfe einer Sekundärspule kompensiert, wobei ein Hall-Sensor mit zugehöriger
Elektronikschaltung verwendet wird. Der sekundärseitige Kompensationsstrom ist ein exaktes
Abbild der gemessenen Spannung (siehe Abbildung 4.4).
Die Merkmale:
• Messung hoher Spannungen möglich
• gute Sicherheits-Isolierung
• hohe Gesamtgenauigkeit
• geringe Temperaturdrift
• hervorragende Linearität
Im Labor wird ein Spannungswandler vom Typ „LEM LV 25-P/SP5“ verwendet. Die Beschaltung des Spannungwandlers wurde so ausgelegt, dass bei einer Spitzenspannung von û = ±566 V
am Signalausgang (gefiltert und ungefiltert) eine Signalspannung von ±10V ausgegeben wird.
WS 2014/15
23
4 Strommessverfahren
4.3 Theoretische Aufgaben
4.3.1 Die Widerstandsmessung
Die Vierleiter-Widerstandsmessung
Nennen Sie Vor- und Nachteile der Vierleiter-Widerstandsmessung.
Der Verwendungszweck des Shunt-Widerstands
Wie und wozu wird ein Shunt-Widerstand verwendet?
Die Vorteile eines Shunt-Widerstands
Nennen Sie Vorteile einer Strommessung mit einem Shunt-Widerstand?
4.3.2 Die Strommessung
Gegeben ist eine Glühlampe mit den Kenndaten Pnenn = 21W bei Unenn = 12V . Berechnen Sie
den theoretisch zu erwartenden Strom, der durch diese Glühlampe fließt?
4.3.3 Der Stromwandler
Das Übertragungsverhältnis
Berechnen Sie aus den, im Theorieteil gegebenen Daten das Verhältnis von Signalausgangsspannung zum Eingangsmessstrom (Vi = uies ).
Die Beispielmessung
Eine Beispielmessung mit dem Stromwandler ergab eine Ausgangssignalspannung von us =
2, 8V . Wie groß war der gemessene Strom ie ?
4.3.4 Der Spannungswandler
Das Übertragungsverhältnis
Berechnen Sie aus den, im Theorieteil gegebenen Daten das Verhältnis von Signalausgangsspannung zur Eingangsmessspannung (Vu = uues ).
Die Beispielmessung
Eine Beispielmessung mit dem Spannungswandler ergab eine Ausgangssignalspannung von
us = 0, 53V . Wie groß war die gemessene Spannung ue ?
24
WS 2014/15
4.4 Praktische Aufgaben
4.4 Praktische Aufgaben
4.4.1 Die Widerstandsmessung
Die Bestimmung des Widerstandswerts
Bestimmen Sie den Widerstandswert des Shunt-Widerstands mittels Zwei- und Vierleiter-Messung.
Verwenden Sie dazu das Tischmultimeter (Fluke 8846A). Führen Sie die Messung durch mit:
a) ca. 30 cm langen Leitungen
b) ca. 80 cm langen Leitungen
Der Ergebnisvergleich
Vergleichen Sie die Widerstandswerte miteinander und begründen Sie eventuelle Unterschiede?
4.4.2 Die indirekte Strommessung
Die Strombestimmung mittels Shunt-Widerstand
Ermitteln Sie den Strom der Glühlampe mittels des Shunt-Widerstandes. Berechnen Sie den
Strom unter Verwendung des Zwei- und Vier-Leitermesswertes!
Die Strombestimmung mittels Ampèremeters
Ermitteln Sie zum Vergleich den Strom der Glühlampe mit Hilfe einer direkten Strommessung
mit dem Tischmultimeters (Fluke 8846A).
Der Ergebnisvergleich
Geben Sie den Strommessfehler der Zwei- und der Vier-Leitermessung absolut und bezogen
auf den Messwert an. Als Referenzwert kann der Messwert des Ampèremeters verwendet werden.
4.4.3 Der Stromwandler
Die Kennlinie des Stromwandlers
Zeichnen Sie mit Hilfe der Hameg-Gleichspannungsquelle eine Strom-Spannungskennlinie des
Stromwandlers auf!
ACHTUNG!!!
Der Stromwandler darf maximal mit 0,9 Ampère belastet werden. Höhere Ströme zerstören das Gerät. Verwenden Sie die Strombegrenzung!!!
Bei der Hameg-Gleichspannungsquelle dürfen die Messkabel nicht unter Last gezogen
werden. Dies lässt die Feinsicherung der Hameg-Gleispannungsquelle durchbrennen!!!
WS 2014/15
25
4 Strommessverfahren
Stellen Sie die Strombegrenzung des Stromversorgungsgerätes so ein, dass Sie mindestens 20
Kennwerte im Bereich von maximal ±800 mA aufnehmen können. Ermitteln Sie jeweils die
ungefilterte Ausgangssignalspannung des Stromwandlers.
Stellen Sie die Kennline des Stromwandler graphisch dar. Zeichnen Sie den idealen Verlauf der
Kennlinie ein. Begründen Sie eventuelle Abweichungen der beiden Kennlinien!
4.4.4 Der Spannungswandler
Die Kennlinie des Spannungswandlers
ACHTUNG!!!
Bitte auch bei der Spannungsmessung vorher die Strombegrenzung auf 0, 5 A einstellen
um eine Zerstörung des Messwandlers beim irrtümlichen Vertauschen von Spannungsund Stromeingang zu verhindern!!!
Zeichnen Sie mit Hilfe der Hameg-Gleichspannungsquelle eine Spannungs-Spannungskennlinie
des Stromwandlers auf!
Nehmen Sie eine Spannungskennline mit mindestens 20 Werten für den Bereich von ±30V auf.
Ermitteln jeweils die ungefilterte Ausgangssignalspannung des Spannungswandlers.
Die Auswertung
Stellen Sie die Kennlinie des Spannungswandlers graphisch dar. Zeichnen Sie den idealen Verlauf der Kennlinie ein. Begründen Sie eventuelle Abweichungen der beiden Kennlinien!
26
WS 2014/15
5 Eigenschaften von Messsystemen 1
Gliederung
• Die Grundbegriffe
• Das statische Verhalten eines Messsystems
– Die lineare Kennlinie eines Filters
– Die Kennlinienfehler
• Das dynamische Verhalten eines Messsystems
– Die Übertragungsfunktion
– Die Sprungfunktion und die Sprungantwort
• Das Tiefpassfilter 1. Ordnung
Lernziele
• Der Umgang mit dem Multimeter
• Der Umgang mit der Gleichspannungsquelle
• Der Umgang mit dem Oszilloskop
– Das Messen von periodischen Signalen
– Das Messen einer Anstiegszeit
• Das Tiefpassfilter 1.Ordnung
– Das Aufstellen der Übertragungsfunktion
– Das Verhältnis von Anstiegszeit, Zeitkonstante und Grenzfrequenz zu Größe des
Widerstandes und des Kondensators
• Der Umgang mit Scialb
– Die Simulation von linearen Systemen
– Die Aufnehmen von Messwerten mit Hilfe der Messkarte
WS 2014/15
27
5 Eigenschaften von Messsystemen 1
5.1 Theorie
5.1.1 Die Grundbegriffe
Das Übertragungssystem
Ein Übertragungssystem (oder auch kurz System) ist eine Anordnung, bei der ein Eingangssignal (Anregungssignalen) ein dazugehöriges Ausgangssignal (Systemantworten) zur Folge hat.
Dazu zählen zum Beispiel Filter und Sensoren. Ein Übertragungssystem, welches zur Messung
von physikalischen Größen genutzt wird, wird Messsystem genannt.
Anregungssignal
System
Systemantwort
Bild 5.1: Die Eingangs- und Ausgangssignal eines Systems (vgl. 2, S. 7)
Das Verhalten von Systemen
Das dynamische und statische Verhalten eines Messsystems beeinflusst maßgeblich das Messergebnis. Die Folgen sind zusätzliche statische oder dynamische Fehler.
Das dynamische Verhalten: Das dynamische Verhalten eines Messsystems oder das Zeitverhalten beschreibt den zeitlichen Verlauf der Ausgangsgröße y(t) bei vorgegebener Eingangsgröße u(t). Diese Verknüpfung zwischen der Eingangs- und Ausgangsgröße lässt sich allgemein
durch einen Operator T ausdrücken, d.h. zu jedem reellen u(t) gehört ein reelles y(t), so dass
y(t) = T (u(t)) gilt.
Das statische Verhalten: Der Zusammenhang der Ausgangswerte von den Eingangswerten im
stationären Endzustand (eingeschwungener Zustand) beschreibt das statische Verhalten eines
Systems.
Der Beharrungszustand: Der Beharrungszustand ist derjenige beliebig aufrecht zu haltende
Zustand eines Messsystems, der sich bei zeitlich konstanten Eingangsgrößen nach Ablauf aller
Ausgleichsvorgänge ergibt.
Der Übergangszustand: Der Übergangszustand ist derjenige Zustand, in welchem sich die
Zustandsgrößen durch fortgesetzte oder einmalige Anregung zeitlich ändert.
Die Kennlinie: Der Zusammenhang zwischen Ein- und Ausgangsgröße eines Messsystems im
Beharrungszustand wird durch die Kennlinie oder ein Kennlinienfeld mit Parametern dargestellt.
28
WS 2014/15
5.1 Theorie
Ausgang
Eingang
3
2
1.4
u0= 0.6
u0= 0.8
u0= 1
u0= 1.2
u0= 1.4
2.5
2
y(t)
1.6
u(t)=u0⋅σ(t)
y (t ) = T (u (t ))
u0= 0.6
u0= 0.8
u0= 1
u0= 1.2
u0= 1.4
1.8
1.2
Eingang Ausgang
1
1.5
0.8
1
0.6
dynamisches System
Messeinrichtung
0.4
0.2
0
0.5
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
0
Statisches Verhalten
1
1.5
2
2.5
3
3.5
4
4.5
5
Kennlinie des Systems bei Variation des Parameters u0
ystationär =y(tÎ∞)
3
y-staionaer
u0
0.5
Zeit [s]
Zeit [s]
2.5
2
1.5
1
0.5
0
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
u0
Bild 5.2: Das statistische und dynamische Verhalten eines Messsystems
5.1.2 Das statische Verhalten von Messsystemen
Zunächst konzentrieren wir uns auf das lineare Verhalten eines Messsystems. Dieses Verhalten
lässt sich im Beharrungszustand durch eine lineare Kennlinie beschreiben. Diese Kennlinie wird
durch folgend fünf Kenngrößen beschrieben:
1. der Nullpunkt y0
2. der Messbereich ue − ua
3. der Anzeigebereich ye − ya
4. die Messgrenze
5. die Überlastungsgrenze
Die ideale Kennlinie verbindet den Messanfang mit dem Messende durch eine Gerade.
y = y0 + m · u
(5.1)
Die Empfindlichkeit des Messsystems oder des Messgerätes wird durch die Änderung der Ausgangsgröße zur Änderung der Eingangsgröße angegeben. Sie ist ein Maß für den Anstieg der
Kennlinie. Für den linearen Fall ist die Bestimmung der Empfindlichkeit recht einfach, da sie
über den gesamten Bereich konstant (siehe Formel 5.2 und Abbildung 5.3).
E=
ye − ya
∆y
=
∆u ue − ua
(5.2)
Die reale Kennlinie eines Messgerätes besitzt meist ein nichtlineares Verhalten. Die Empfindlichkeit ändert sich daher mit der Eingangsgröße u.
Für einen Punkt uP gilt:
E=
WS 2014/15
∂y
∂u
(5.3)
29
5 Eigenschaften von Messsystemen 1
Bild 5.3: Die lineare Kennlinie eines
Messsystems
Bild 5.4: Die nichtlineare Kennlinie
eines Messsystems
Bei kleinen Messbereichen (geringe Abweichungen vom Arbeitspunkt u p ) kann die Kennlinie
durch ihre Tangente angenähert werden. Der analytische Ausdruck wird dazu um den Arbeitspunkt in einer Taylorreihe entwickelt und diese nach dem ersten Glied abgebrochen (siehe
Bild 5.4).
Die Kennlinienfehler
Folgende Fehler können an einer Kennlinie eines Übertragungssystems abgelesen werden:
Bild 5.5: Die ideale Kennlinie ohne
Fehler
Bild 5.6: Die Kennlinie mit Offsetfehler
Der Nullpunktfehler: Steigung stimmt, Gerade beginnt nicht im Punkt y0 (siehe Bild 5.6)
Der Skalenfaktorfehler/Verstärkungsfehler: Der Nullpunkt y0 stimmt, nicht jedoch der
Endpunkt der Übertragungsgeraden (siehe Bild 5.7)
Der Linearitätsfehler: Nullpunkt und Messbereichsende stimmen überein, dazwischen läuft
die Übertragungskennlinie nichtlinear (siehe Bild 5.8)
Der relative Kennlinienfehler: Zum richtigen Anzeigewert yr einer Kennlinie gehört der
richtige Messwert ur aufgrund der physikalischen Gesetzmäßigkeit (Bild 5.8). Die ideale
Kennlinie ordnet jedoch dem Anzeigewert einen fehlerhaften Messwert u f zu. Umgekehrt
30
WS 2014/15
5.1 Theorie
reale und ideale Kennlinie
200
yr 150
y
yf 100
50
0
-20
Bild 5.7: Die Kennlinie mit einem Verstärkungsfehler
0
ua
20
40
ur
u
60
uf
80
100
120
ue
Bild 5.8: Der nichtlineare Verlauf einer Kennlinie
ordnet die ideale Kennlinie dem richtigen Messwert ur einen fehlerhaften Anzeigewert y f
zu. Aus diesen Überlegungen heraus ist der relative Kennlinienfehler
Fr =
(u f − ua ) − (ur − ua ) u f − ur
=
ur − ua
ur − ua
(5.4)
Dieser relative Kennlinienfehler kann mit E · (u f − ua ) = (yr − ya ) und E · (ur − ua ) =
(y f − ya ) auf die Anzeigegröße umgerechnet werden:
Fr =
yr − y f
y f − ya
(5.5)
5.1.3 Das dynamische Verhalten von Messsystemen
In der Messtechnik besteht die Forderung, die Information verzögerungsfrei über die Messgröße
zu gewinnen. Das Ausgangssignal kann jedoch nicht beliebig schnell dem Eingangssignal folgen, da z. B.
• eine Reibung überwunden werden muss,
• Massen beschleunigt werden,
• Ladungen zu- oder abgeführt werden,
• Energiespeicher gefüllt oder geleert werden.
Das Verhalten eines Messsystems oder eines Messgerätes kann im Zeit- oder Frequenzbereich
charakterisisert werden.
Im Zeitbereich ist die Beschreibung eines linearen Systems durch eine lineare Differentialgleichung möglich. Sie Beschreibt den Zusammenhang zwischen Eingangs- und Ausgangsgrößen
N
∑ an
n=0
WS 2014/15
M
d n y(t)
d m u(t)
=
b
m
∑
dt n
dt m
m=0
(5.6)
31
5 Eigenschaften von Messsystemen 1
Der Frequenzgang und die Übertragungsfunktion
Der Frequenzgang dient der mathematischen Beschreibung des Verhältnisses des Ausgangssignals zum Eingangssignal eines Systems im Frequenzbereich.
Für zeitkontinuierliche Übertragungssysteme ergibt sich aus dem Verhältnis von Ausgangsund Eingangsspannung der Frequenzgang und ist wie folgt definiert (X-Eingangssignal, YAusgangssignal) (vgl. 3, S. 815):
G( jω) =
Y ( jω)
X( jω)
(5.7)
(5.8)
Wird jω durch jω + σ = s ersetzt, erhalten wir die Übertragungsfunktion
Y (s)
X(s)
L {y(t)}
=
L {x(t)}
G(s) =
(5.9)
(5.10)
Die Übertragungsfunktion gibt das Verhältnis der Laplacetrtansformierten (L ) von Ausgangsund Eingangsspannung für beliebige von der Zeit unabhängige Signale an.
Aus dem Frequenzgang bzw. der Übertragungsfunktion lassen sich die wichtigsten Frequenzverläufe (der Amplitudengang, die Dämpfung und der Phasengang) berechnen bzw. das BodeDiagramm aufstellen.
Die Sprungfunktion und die Sprungantwort
Da ein Tiefpassfilter 1. Ordnung exemplarischer Gegenstand der Versuchsanordnung im weiteren Verlauf sein wird, werden die Sprungfunktion und die Sprungantwort an diesem Beispiel
eingeführt.
Zur Beschreibung der dynamischen Übertragungseigenschaften wird in der Praxis zur Anregung
eines Übertragungssystems bzw. eines Messsystems häufig die Sprungfunktion σ (t) (siehe Abbildung 5.9) als Testsignal verwendet.
32
WS 2014/15
5.1 Theorie
σ (t)
1
0 f ür t < 0
σ (t) = 0, 5 f ür t = 0
1 f ür t > 0
t
−1
Bild 5.9: Die Sprungfunktion (vgl. 2, S. 21)
Zur besseren Handhabung werden meistens Rechteckfunktionen verwendet, da diese einfach
mit einem Funktionsgenerator erzeugt werden können.
ΠT(t)
T
1 f ür |t| <
2
T
ΠT (t) = 0, 5 f ür |t| =
2
0 sonst
1
−
T
2
t
T
2
-1
Bild 5.10: Die Rechteckfunktion (vgl. 2, S. 21)
Das Ausgangssignal eines Systems, welches aus einer Sprungfunktion σ (t) als Eingangssignal
resultiert, wird als Sprungantwort hσ (t) bezeichnet (vgl. 2, S. 90):
x (t )
A{σ (t)} := hσ (t)
σ (t)
σ (t)
1
TP
y (t )
h σ (t )
h σ (t )
2
Bild 5.11: Die Sprungantwort am Beispiel eines Tiefpassfilters 1. Ordnung
Eine Beschreibung der Sprungantwort kann mit Hilfe der Verzugszeit tv , der Anstiegszeit tr , der
Einschwingzeit te , und der Ausgleichszeit tg vorgenommen werden (vgl. 1, S. 32).
Bei der Anstiegszeit handelt es sich um die Zeit, die zwischen dem 10% und dem 90%-Wert
des Anstiegs vergeht, bezogen auf den niedrigsten und höchsten Punkt der Sprungantwort tr =
t(h = 0, 9) − t(h = 0, 1) (siehe Abbildung 5.12(a)) (vgl. 1, S. 32).
Als Einstellzeit (setting time) ts wird die Dauer bezeichnet, die die Sprungantwort benötigt, bis
sie ein vorher definiertes Toleranzband nicht mehr verlässt (siehe Abbildung 5.12(b)) (vgl. 1, S.
32).
WS 2014/15
33
5 Eigenschaften von Messsystemen 1
Die Zeit zwischen Sprungeinsatz und Schnittpunkt der Wendetangente mit der Nulllinie ist als
Verzugszeit tv definiert (siehe Abbildung 5.12(c)) (vgl. 1, S. 32).
Die Zeit zwischen dem Schnittpunkt der Wendetangente mit der Nulllinie und dem Schnittpunkt
der Wendetangente mit dem stationären Wert wird als Ausgleichszeit tg bezeichnet (siehe Abbildung 5.12(c)) (vgl. 1, S. 32).
Um den Einschwingvorgang besser beschreiben zu können, ist es sinnvoll die Zeit zwischen
dem Schnittpunkt der Tangente im Punkt h(t) = 0, 5 mit der Nulllinie und dem Schnittpunkt der
Tangente mit der Linie des stationären Wertes zu betrachten. Diese Zeit wird als Einschwingzeit
te bezeichnet (siehe Abbildung 5.12(d)) (vgl. 1, S. 32).
h σ (t )
h σ (t )
1
0,9
0,1
0,1
t
tr
t
ts
(a) Die Anstiegszeit tr
(b) Die Einstellzeit ts
h σ (t )
h σ (t )
1
1
0,5
0,5
tv
tg
t
(c) Die Verzugszeit tv und die Ausgleichszeit
tg
te
t
(d) Die Einschwingzeit te
Bild 5.12: Die charakteristischen Zeiten zur Beschreibung von Sprungantworten (vgl. 1, S. 32)
5.1.4 Das Tiefpassfilter
Ein Tiefpassfilter hat die Aufgabe, tiefe Frequenzen unverändert zu übertragen und höhere Frequenzen zu dämpfen. Die Wirkung des Tiefpassfilters bezieht sich insbesondere auf sinusförmige Wechselspannungen.
Das passive Tiefpassfilter 1. Ordnung
Ein Tiefpassfilter lässt sich am leichtesten mit Hilfe eines Widerstandes und eines Kondensators
realisieren. Zudem lässt sich ein einfaches Tiefpassfilter auch mit Hilfe einer Spule und eines
Widerstandes erstellen.
Zur weiteren Berechnung wird der Spannungsteiler in komplexer Schreibweise verwendet. Da-
34
WS 2014/15
5.1 Theorie
R
C
U e (t )
U a (t )
Bild 5.13: Die Schaltung eines RC-Tiefpassfilters
raus ergibt sich die Übertragungsfunktion G( jω). In den folgenden Berechnungen gilt die
Zeitkonstante τ = RC.
Die Einheitenbetrachtung:
τ =R ·C
(5.11)
⇔ [1s] = [1Ω · 1F]
V As
⇔ [1s] = 1 ·
A V
⇔ [1s] = [1s]
(5.12)
(5.13)
(5.14)
Der Frequenzgang und die Übertragungsfunktion eines passiven Tiefpassfilters 1.
Ordnung
Zunächst betrachten wir dasRC-Tiefpassfilter
als einfachen Spannungsteiler.Es giltdaher für
1
1
das Eingangssignal Ue = I · R +
und für das Ausgangssignal Ua = I ·
. Daraus
jωC
jωC
ergibt sich der Frequenzgang:
1
Ua
1
1 − jωRC
jωC
G( jω) =
=
=
=
1
Ue
1 + jωRC 1 + (ωRC)2
R + jωC
(5.15)
Wird jω durch jω + σ = s ersetzt, erhalten wir die Übertragungsfunktion
⇒ G(s) =
1
1
=
1 + sRC 1 + sτ
(5.16)
(vgl. 3, S. 1533)
Der Real- und Imaginärteil
Es kann durchaus sinnvoll sein, den Frequenzgang in Real- und Imaginärteil aufzutrennen.
WS 2014/15
35
5 Eigenschaften von Messsystemen 1
G( jω) =
Ah (ω) · e jφh (ω) =
Re(ω) =
Re{H( jω)} =
Im(ω) =
Im{H( jω)} =
1
=
1 + jωτ
1
1 + (ωτ)2
−ωτ
1 + (ωτ)2
1 − jωτ
1 + (ωτ)2
(5.17)
(5.18)
(5.19)
(vgl. 2, S. 107)
Die 3dB-Grenzfrequenz
Die Grenzfrequenz fg ist die Frequenz, bei der die Amplitude eines Systems auf rund 70 % (=
ˆ √12 =
−3 dB) vom Bezugswert sinkt. Je nach Messsystem wird versucht eine so große Abweichung
zu vermeiden.
A|dB =20 · log(A)
1
−3dB =20 · log √
2
1
A(ω) =
2
q
1
⇔ √ = 1 + (ωτ)2
2
1
⇒ fg =
2πτ
(5.20)
(5.21)
(5.22)
(5.23)
(5.24)
Bei dieser Frequenz beträgt die Phasenverschiebung φ = −45◦ (vgl. 3, S. 1534).
36
WS 2014/15
5.1 Theorie
Die Anstiegszeit und die Grenzfrequenz
Die Anstiegszeit tr (siehe 5.40) ist eine wichtige Kenngröße zur Charakterisierung von Tiefpässen.
tr =t(90%) − t(10%)
(5.25)
=τ(ln0, 9 − ln0, 1)
(5.26)
=τln9 ≈ 2, 2τ
1
fg =
2πτ
0, 35
⇒ tr ≈
fg
(5.27)
(5.28)
(5.29)
(vgl. 3, S. 1536)
Auf diese Weise lässt sich mit Hilfe der Anstiegszeit tr die Grenzfrequenz fg und die Zeitkonstante τ ermitteln.
h σ (t )
1
0,9
0,1
τ
t
tr
Bild 5.14: Die Sprungantwort eines RC-Tiefpassfilters mit Zeitkonstante τ und Anstiegszeit tr
Diese Beziehungen gelten auch näherungsweise für Tiefpässe höherer Ordnung. Mit Hilfe einer Reihenschaltung von mehreren Tiefpassfiltern lässt sich ein Tiefpassfilter höherer Ordnung
erzeugen. Bei der Bestimmung der Anstiegszeit und der Grenzfrequenz dieses Tiefpassfilters
höherer Ordnung können die Anstiegszeiten bzw. Grenzfrequenzen der einzelnen Tiefpässe
berücksichtigt werden (vgl. 3, S.1536):
r
2
ta ≈ ∑ tai
(5.30)
i
1
fg ≈(∑ fgi−2 )− 2
(5.31)
i
WS 2014/15
37
5 Eigenschaften von Messsystemen 1
Die Bestimmung des Frequenzgangs mit Hilfe der Anstiegszeit
Zur Bestimmung des Frequenzgangs und des Bodediagramms eines Systems wird zunächst eine
Sprungfunktion auf das zu untersuchende System gegeben. Im Anschluss wird die Anstiegszeit
der Sprungantwort gemessen (Dafür steht das Symbol einer Uhr in Abbildung 5.15).
x (t )
σ (t)
y (t )
h σ (t )
1
σ (t)
tr
TP 1.Ord.
2
3
h σ (t )
h σ (t)
0.9
0.1
tr
Bild 5.15: Das Blockschaltbild mit Diagrammen bei Verwendung eines unbelasteten RCTiefpassfilters
Bei Tiefpässen 1.Ordnung kann von folgendem Zusammenhang ausgegangen werden:
tr =2, 2τ
tr
⇔τ =
2, 2
(5.32)
(5.33)
Hieraus ergibt sich folgender Zusammenhang zwischen Anstiegszeit und Grenzfrequenz:
1
2πτ
1
⇒ fg =
tr
2π 2,2
fg =
2, 2
2πtr
2, 2
⇔ fg · 2π =
tr
2, 2
⇔ tr =
fg · 2π
0, 35
⇔ tr =
fg
⇔ fg =
(5.34)
(5.35)
(5.36)
(5.37)
(5.38)
(5.39)
Dies bedeutet, dass wir durch die Messung der Anstiegszeit bei Tiefpässen 1.Ordnung ohne
weiteres den Frequenzgang aufstellen und die Grenzfrequenz des Filters berechnen können.
38
WS 2014/15
5.1 Theorie
x (t )
σ (t)
y (t )
h σ (t )
1
σ (t)
tr
TP 1.Ord.
2
3
h σ (t )
τ=
tr
2,2
τ
G( j ω)
4
h σ (t )
0.9
0.1
tr
Bild 5.16: Das Blockschaltbild mit Diagrammen bei Verwendung eines unbelasteten RCTiefpassfilters
Beispiel
Bei einer gemessenen Anstiegszeit von 1, 167 · 10−4 s ergibt sich folgende Rechnung:
tr
2, 2
1, 167 · 10−4 s
=
2, 2
=5, 305 · 10−5 s
(5.42)
=RC
ˆ
(5.43)
τ=
(5.40)
(5.41)
Aus dem errechneten τ lässt sich nun zum einen die Grenzfrequenz des zu untersuchenden
Tiefpassfilters ermitteln und zum anderen der Frequenzgang bestimmen.
1
1
=
2πτ
2πRC
1
=
2π · 5, 305 · 10−5 s
=3000Hz
fg =
1
1
=
1 + jωτ
1 + jωRC
1
=
1 + jω · 5, 305 · 10−5 s
1
⇒ G(s) =
1 + s · 5, 305 · 10−5 s
G( jω) =
WS 2014/15
(5.44)
(5.45)
(5.46)
(5.47)
(5.48)
(5.49)
39
5 Eigenschaften von Messsystemen 1
5.2 Theoretische Aufgaben
5.2.1 Das statisches Verhalten eines Tiefpassfilters
Die Kennlinie eines Übertragungssystems
Welche Fehler können an einer Kennlinie eines Übertragungssystems gemessen bzw. abgelesen
werden?
5.2.2 Das dynamisches Verhalten eines Tiefpassfilters
Die Sprungfunktion und die Sprungantwort
Erläutern Sie kurz die Begriffe Sprungantwort und Sprungfunkion und deren Anwendung in der
Messtechnik!
Mit welchen Zeiten kann die Sprungantwort beschrieben werden?
Der Frequenzgang und die Übertragungsfunktion
Leiten Sie die Übertragungsfunktion eines RC-Tiefpassfilters 1. Ordnung her!
Die Anstiegszeit tr und die Zeitkonstante τ
Wie lässt sich die Zeitkonstante τ mit Hilfe der Anstiegszeit tr ermitteln?
5.3 Praktische Aufgaben
5.3.1 Das statische Verhalten eines Tiefpassfilters
Die Aufnahme der Messwerte
Nehmen Sie die Kennlinie eines Tiefpassfilters auf und übertragen Sie die Werte in Scilab.
Details der Aufnahme der Messwerte:
• Nutzen Sie das Tiefpassfilter in der blauen Filterbox.
• Legen Sie eine Gleichspannung an den Eingang des Tiefpassfilters und messen Sie die
Ausgangsspannung.
• Die Eingangspannung soll zwischen −10 V und +10 V liegen.
• Die Eingangsspannung soll in 2 V -Schritten geändert werden.
• Um eine negative Gleichspannung mit der Gleichspannungsquelle zu realisieren, muss
umgepolt werden.
40
WS 2014/15
5.3 Praktische Aufgaben
U e (t )
TP
U a (t )
V
Bild 5.17: Das Blockschaltbild des Messaufbaus zur Aufnahme der Kennlinie.
Das Plotten der Kennline
Stellen Sie die Kennlinie grafisch dar! Denken Sie dabei an die korrekte Achsenbeschriftung.
Zeichnen Sie in das Diagramm die ideale Kennlinie ein!
Die Kennlinienfehler
Bestimmen Sie den Nullpunktfehler, den Verstärkungsfehler und den maximalen relativen Kennlinienfehler!
5.3.2 Die Sprungantwort eines Tiefpassfilters 1. Ordnung
Die Erstellung einer Rechteckfunktion in Scilab.
Erstellen Sie mit Scilab eine Rechteckfunktion! Das Signal soll wie folgt definiert sein:
0 f ür 0 s < t 5 0, 25 s
ΠT (t) = 5 f ür 0, 25 s < t 5 0, 75 s
0 f ür 0, 75 s < t 5 1 s
Plotten Sie das Signal!
Tipp: Verwenden Sie den Befehl linspace(...)! Der Vektor sollte 8000 Werte enthalten.
WS 2014/15
41
5 Eigenschaften von Messsystemen 1
Listing 5.1: Scilab-Code zum Auslesen der Messwerte
1
/ / E r s t e l l e n e i n e r R e c h t e c k f u n k t i o n bzw . S p r u n g f u n k t i o n
2
3
4
5
/ /−−−−−−−−−−−−−−−
/ / B i t t e Ergaenzen !
/ /−−−−−−−−−−−−−−−
6
7
8
9
10
11
12
13
Grafik1=scf (0)
t i t l e ( " Die S i m u l a t i o n e i n e r R e c h t e c k f u n k t i o n " , ’ f o n t s i z e ’ , 5 ) ;
p l o t 2 d ( t , U, 2 )
xlabel ( " Zeit t in s " , ’ fo nt si ze ’ ,4) ;
y l a b e l ( " A m p l i t u d e U i n V" , ’ f o n t s i z e ’ , 4 ) ;
xset ( " font s i z e " , 2) ;
xgrid ;
Die Erstellung der Übertragungsfunktion eines Tiefpassfilters 1. Ordnung in
Scilab.
Erstellen Sie die Übertragungsfunktion der drei zu untersuchenden Tiefpässe in Scilab! Es werden ein Kondensator mit 100 nF und Widerstände mit jeweils 1 kΩ, 3 kΩ und 5 kΩ verwendet.
Verwenden Sie die Befehle poly(...) und syslin(...)!
Listing 5.2: Scilab-Code zum Auslesen der Messwerte
1
/ / E r s t e l l e n e i n e s l i n e a r e n S y s t e m s bzw . T i e f p a s s 1 . Ordnung m i t H i l f e d e r
Uebertragungsfunktion
2
3
4
5
/ /−−−−−−−−−−−−−−−
/ / B i t t e Ergaenzen !
/ /−−−−−−−−−−−−−−−
6
7
8
s=poly (0 , ’ s ’ ) ;
g= s y s l i n ( ’ c ’ , / / B i t t e E r g a e n z e n ! / / ) ;
Die Durchführung der Simulation und das Plotten der Ergebnisse
Simulieren sie nun die Sprungantwort mit Scilab mit Hilfe des Befehls csim(...)! Plotten Sie
die Rechteckfunktion und die Sprungantwort in eine Grafik!
Listing 5.3: Scilab-Code zum Auslesen der Messwerte
1
2
/ / S i m u l a t i o n und P l o t t e n d e r S p r u n g a n t w o r t
y= c s i m ( / / B i t t e E r g a e n z e n ! / / ) ;
3
4
5
6
7
8
9
10
11
12
Grafik2=scf (1)
t i t l e ( " Die R e c h t e c k f u n k t i o n und d i e S p r u n g a n t w o r t " , ’ f o n t s i z e ’ , 5 ) ;
plot2d ( t , y , 2) ;
p l o t 2 d ( t , U, 3 )
xlabel ( " Zeit t in s " , ’ fo nt si ze ’ ,4) ;
y l a b e l ( " A m p l i t u d e U i n V" , ’ f o n t s i z e ’ , 4 ) ;
legend ( " Sprungantwort " , " Rechteckfunktion " )
xset ( " font s i z e " , 2) ;
xgrid ;
42
WS 2014/15
5.3 Praktische Aufgaben
Die Aufnahme der Sprungantwort eines Tiefpassfilters 1. Ordnung
Nehmen Sie nun die Sprungantwort der drei Tiefpässe mit Hilfe des Oszilloskops und mit Hilfe
der Messkarte und Scilab messtechnisch auf.
Hinweise zur Messung:
• Verwenden Sie einen 100 nF Kondensator und die Widerstandsdekade (1 kΩ, 3 kΩ,
5 kΩ).
• Verwenden Sie den Funktionsgenerator und erzeugen Sie eine Rechteckfunktion mit einer
Amplitude von 2, 5 V , mit einem Offset von 2, 5V und einer Frequenz von 1 Hz.
• Führen Sie zunächst die Messung der Sprungantwort mit dem Oszilloskop durch. Messen
Sie die Anstiegszeiten aller drei Tiefpässe!
• Erweitern Sie im Anschluss den Messaufbau um die Messkarte. Nehmen Sie für alle drei
Tiefpässe die Sprungantworten mit Hilfe von Scilab auf und plotten Sie die Ergebnisse!
Nutzen Sie in Scilab die Funktion mdt_dataread(...), um mit Hilfe der Messkarte die
Sprungantwort in Scilab aufzunehmen!
• Zusatzaufgabe: Plotten Sie den theoretischen Verlauf zusammen mit den gemessenen
Werten in ein Diagramm.
Hinweise zum Umgang mit dem Oszilloskop:
• Achten Sie darauf, dass bei den einzelnen Kanälen (CH1, CH2) bei Kopplung: DC
eingestellt ist.
• Um einwandfrei messen zu können, verwenden Sie die Trigger-Funktion des Oszilloskops.
Drücken Sie die Taste Mode/Coupling in der Trigger-Sektion. Wählen Sie beim oberen
Modus: Flanke, bei Quelle: CH2, beim unteren Modus: Normal und bei der Kopplung:
DC aus.
• Zum Messen der Anstiegszeit drücken sie die Measure-Taste, wählen sie Zeit und dann
den Eintrag Anstiegszeit aus.
U e (t )
TP
U a (t )
Ch 1
Ch 2
AI 0
AI 1
ADU
Bild 5.18: Das Blockschaltbild zur Aufnahme der Sprungantwort
Listing 5.4: Scilab-Code zum Auslesen der Messwerte
1
2
3
xdel ( winsid ( ) )
/ / Die Messung d e r S p r u n g a n t w o r t
/ / E i n g a n g s s p a n n u n g 5V / / O f f s e t 2 , 5V / / F r e q u e n z 1Hz
WS 2014/15
43
5 Eigenschaften von Messsystemen 1
4
/ / W i d e r s t a e n d e 1kOhm , 3kOhm , 5kOhm / / K o n d e n s a t o r 100 nF
5
6
U= m d t _ d a t a r e a d ( 2 0 0 0 0 , 5 , 1 0 0 0 , 0 , 2 , 1 4 , 1 ) ;
7
8
9
10
/ /−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
/ / B i t t e ergaenzen !
/ /−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
11
12
13
14
15
16
17
18
19
20
21
Grafik1=scf (0)
t i t l e ( " Die Messung d e r S p r u n g a n t w o r t " , ’ f o n t s i z e ’ , 5 ) ;
p l o t 2 d ( t , Ua , 2 )
p l o t 2 d ( t , Ue , 3 )
x l a b e l ( " Zeit t in s " , ’ f o n t s i z e ’ , 4) ;
y l a b e l ( " A m p l i t u d e U i n V" , ’ f o n t s i z e ’ , 4 ) ;
legend ( ’ Sprungantwort ’ , ’ Sprungfunktion ’ , 3)
xset ( ’ font s i z e ’ , 2) ;
xgrid ;
22
23
x s 2 p d f ( G r a f i k 1 , ’C : \ Dokumente und E i n s t e l l u n g e n \ s t u d e n t \ E i g e n e D a t e i e n \MT−
Labor \ Messung_Sprungantwort . pdf ’ )
Die Auswertung
Vergleichen Sie die Ergebnisse der Messung mit den Ergebnissen der Simulation.
• Berechnen Sie aus den gemessenen Anstiegszeiten für jedes Tiefpassfilter die Zeitkonstante τ und stellen Sie die daraus resultierenden Übertragungsfunktionen auf.
• Vergleichen Sie die theoretischen Anstiegszeiten mit den Anstiegszeiten die Sie mit Hilfe
des Oszilloskops ermittelt haben.
• Berechnen Sie die Grenzfrequenz von jedem Tiefpassfilter einmal aus den theoretischen
Werten und aus den gemessenen Werten.
• Stellen Sie die theoretischen und die gemessenen Werte jeweils in einer Tabelle dar.
• Wie verändert sich die Anstiegszeit und die Grenzfrequenz bei Veränderung des Widerstandes?
Kapazität
C
100 nF
100 nF
100 nF
Widerstand Zeitkonstante Anstiegszeit
R
τ
tr
1 kΩ
3 kΩ
5 kΩ
Grenzfrequenz Übertragungsfunktion
fg
G(s)
Tabelle 5.1: Beispiel für eine Wertetabelle
44
WS 2014/15
Literaturverzeichnis
[1] F ILBERT, Prof. Dr.-Ing. D. ; G ÜHMANN, Prof. Dr.-Ing. C.: Elektronische Messtechnik:
Messen Elektrischer Größen. Institut für Energie- und Automatisierungstechnik, Fachgebiet Elektronische Mess- und Diagnosetechnik, TU-Berlin, Berlin, 2003. http://www.mdt.
tu-berlin.de/fileadmin/fg184/Lehre/Messtechnik/Skript/mt1skript.pdf
[2] N OLL, Peter: Signale und Systeme. Institut für Telekommunikationssysteme, Fachgebiet
Nachrichtenübertragung, TU-Berlin, Berlin, 2011.
[3] T IETZE, Ulrich ; S CHENK, Christoph: Halbleiter-Schaltungstechnik. 12. Aufl. Berlin [u.a.]
: Springer, 2002 (Springer-Lehrbuch). www.tietze-schenk.de. – ISBN 3–540–42849–6
WS 2014/15
45
6 Die Eigenschaften von Messsystemen 2
Gliederung
• Das Bodediagramm
• Die Übertragungsfunktion eines Tiefpassfilters 1. Ordnung
• Die Übertragungsfunktion eines Tiefpassfilters höherer Ordnung
Lernziele
• Die theoretische Ermittlung von Amplituden- und Phasengängen
• Die messtechnische Ermittlung von Amplituden- und Phasengängen
• Der Umgang mit dem Oszilloskop
• Der Umgang mit dem Frequenzgenerator
• Der Umgang mit Scilab
– Die Simulation von Amplituden- und Phasengängen
– Das plotten von Bodediagrammen
6.1 Theorie
6.1.1 Das Bodediagramm
Das Bodediagramm besteht aus zwei Funktionsgraphen, die übereinander angeordnet werden.
Es zeigt die stationäre Reaktion eines Systems auf ein Anregungssignal. Der obere Funktionsgraph gibt hierbei Auskunft über den Amplitudengang in Abhängigkeit von der Frequenz f in
Hz bzw. der Kreisfrequenz ω in 1s . Der untere Funktionsgraph zeigt den Phasengang (Phasenverschiebung) φ in Abhängigkeit von der Kreisfrequenz ω. Der Amplitudengang wird gerne in dB
und damit logarithmisch dargestellt. Die y-Achse des Phasenganges ist im Gradmaß eingeteilt.
Auf der x-Achse wird die Kreisfrequenz ebenfalls logarithmisch dargestellt. Diese Diagramme
geben Aufschluss über das Verhalten des Systems bei unterschiedlichen Frequenzen.
Der Erfinder und Namensgeber dieser Diagramme ist Hendrik Wade Bode (1905-1982). Bode
war ein US-amerikanischer Mathematiker und Elektrotechniker.
Ein möglicher Anwendungsfall ist die Bestimmung des nutzbaren Frequenzbereiches eines
Messverstärkers. In diesem Beispiel sei uns wichtig, dass die Amplitude des Messverstärkers
nicht unter 70% bzw. −3 dB sinkt und der Phasengang linear verläuft. Diese Bereiche lassen
sich hervorragend im Bodediagramm markieren. Danach kann an der x-Achse der entsprechende
Frequenzbereich abgelesen werden (siehe Abbildung 6.1).
46
WS 2014/15
6.1 Theorie
Es gibt zahlreiche Möglichkeiten, den Amplituden- und Phasengang eines Systems messtechnisch zu ermitteln. Eine naheliegende Möglichkeit ist sicher, eine Sinusspannung an das System anzulegen und mit Hilfe eines Oszilloskops die Amplitude und die Phasenverschiebung
zu messen. Hierbei muss die Frequenz schrittweise erhöht und für jede Frequenz die jeweilige
Amplitude und die jeweilige Phasenverschiebung aufgenommen werden. Des Weiteren lässt
sich mit Hilfe der Übertragungsfunktion eines Systems das Bodediagramm erstellen.
A (ω)
0dB
−10dB
−20dB
10−1
100
101
102
103
ω
100
101
102
103
ω
ϕ(ω)
0°
45 °
90 °
10−1
Bild 6.1: Ein Beispiel für ein Bodediagramm
6.1.2 Die Übertragungsfunktion eines Tiefpassfilters 1. Ordnung
Zur Wiederholung betrachten wir nochmal die Übetragungsfunktion eines Tiefpassfilters 1.
Ordnung. Zunächst betrachten wir das
als einfachen Spannungsteiler.
RC-Tiefpassfilters
Es gilt
1
1
daher für das Eingangssignal Ue = I · R +
und für das Ausgangssignal Ua = I ·
.
jωC
jωC
Daraus ergibt sich für die Übertragungsfunktion:
1
Ua
1
1 − jωRC
jωC
G=
=
=
=
1
Ue
1 + jωRC 1 + (ωRC)2
R + jωC
(6.1)
Wird jω durch jω + σ = s ersetzt, erhalten wie die Übertragungsfunktion:
⇒ G(s) =
1
1
=
1 + sRC 1 + sτ
(6.2)
(vgl. 3, S. 1533)
WS 2014/15
47
6 Die Eigenschaften von Messsystemen 2
Der Real- und Imaginärteil
Das Ziel soll es sein, den Amplitudengang und den Phasengang für das Bodediagramm zu erstellen. Es ist hierfür durchaus sinnvoll, die Übertragungsfunktion zunächst in Real- und Imaginärteil aufzutrennen, da dies die Erstellung von Amplituden und Phasengang vereinfacht.
G( jω) =
Ah (ω) · e jφh (ω) =
Re(ω) =
Re{H( jω)} =
Im(ω) =
Im{H( jω)} =
1 − jωτ
1 + (ωτ)2
1
=
1 + jωτ
1
1 + (ωτ)2
−ωτ
1 + (ωτ)2
(6.3)
(6.4)
(6.5)
(vgl. 2, S. 107)
Der Amplitudengang
A (ω)
1
A(ω) = |G( jω)| = p
1 + (ωτ)2
1
(6.6)
√2
1
−τ
1
τ
ω
Bild 6.2: Der Amplitudengang (vgl. 2, S. 108)
Die Dämpfung
a (ω)
a(ω) = 10 log(1 + (ωτ)2 )
3dB
(6.7)
1
−τ
1
τ
ω
Bild 6.3: Die Dämpfung (vgl. 2, S. 108)
48
WS 2014/15
6.1 Theorie
Der Phasengang
ϕ(ω)
φ (ω) =
=
=
π
2
(6.8)
arg{G( jω)}
Im(ω)
arctan
Re(ω)
−arctan(ωτ)
π
4
(6.9)
1
τ
ω
1
−τ
−π
4
(6.10)
−π
2
Bild 6.4: Der Phasengang (vgl. 2, S. 108)
Der Amplituden- und der Phasengang lassen sich im Anschluss in logarithmischer Darstellung
im Bodediagramm veranschaulichen (siehe Abbildung 6.1).
6.1.3 Die Übertragungsfunktion eines Tiefpassfilters höherer Ordnung
Die Übertragungsfunktion eines Tiefpassfilters hat im Laplacebereich allgemein die Form:
G(s) =
A0
1 + c1 s + c2 s2 + · · · + cn sn
(6.11)
Für die Realisierung der Filter ist es günstig, wenn das Nennerpolynom in Faktoren zerlegt
ist. Werden auch komplexe Pole zugelassen, so erhält man ein Produkt aus quadratischen Ausdrücken
G(s) =
(1 + α1 s + β1
A0
2
s ) (1 + α
2 s + β2 s
2) . . .
(6.12)
Für ein Tiefpassfilter 2. Ordnung gilt daher beispielsweise:
G(s)2.Ord =
1
1 + α1 s + β1 s2
(6.13)
Werden zwei Tiefpassfilter 2. Ordnung in Reihe geschaltet, ergibt sich ein Tiefpassfilter 4. Ordnung. Bei baugleichen Tiefpassfiltern folgt für die Übertragungsfuntkion:
G(s)4.Ord =(G(s)2.Ord )2
2
1
=
1 + α1 s + β1 s2
(6.14)
(6.15)
Die Koeffizienten α und β lassen sich mit Hilfe einer Koeffiziententabelle (siehe Tabelle 6.1)
je nach Filtercharakteristik berechnen.
WS 2014/15
49
6 Die Eigenschaften von Messsystemen 2
a1
ωg
b1
β= 2
ωg
α=
(6.16)
(6.17)
Mit Hilfe der normierten Bildvariablen P = s/ωg lassen sich die Übertragungsfunktionen allgemein wie folgt darstellen:
A0
G(s) = 2 2 s
s
s
2
2
1 + α1 ωg ωg + β1 ωg ωg
1 + α2 ωg ωg + β2 ωg ωsg
...
G(P) =
A0
2
(1 + a1 P + b1 P ) (1 + a2 P + b2 P2 ) . . .
(6.18)
(6.19)
Mit derart normierten Übertragungsfunktionen und den entsprechenden Tabellen können die
Parameter unter Vorgabe einer gewünschten Übertragungscharakteristik bestimmt werden. Die
Koeffizienten sind so zu wählen, dass das Filter bestimmte Anforderungen im Zeit- oder Frequenzbereich erfüllt. Folgende Eigenschaften werden berücksichtigt:
• Maximal flacher Verlauf im Durchlassbereich
• Steiler Abfall des Betragsfrequenzganges oberhalb der Grenzfrequenz
• Geringes Überschwingungen der Sprungantwort
• Phasenverzerrung
• Optimales Rechteckübertragungsverhalten
An dieser Stelle sollen nur drei verschiedene Filtercharakteristiken diskutiert werden. Die charakteristischen Eigenschaften werden durch die Filterfrequenzgänge (siehe Abbildung 6.5) und
durch die Sprungantworten (siehe Abbildung 6.6) deutlich. Die Koeffizienten eines ButterworthFilters in Abhängigkeit der Ordnung sind in der Tabelle 6.1 angegeben (vgl. 3, S. 816).
Der Butterworth-Tiefpassfilter besitzt einen Amplituden-Frequenzgang, der möglichst lang
horizontal verläuft und erst kurz vor der Grenzfrequenz scharf abknickt. Seine Sprungantwort zeigt ein beträchtliches Überschwingen, das mit zunehmender Ordnung größer wird
(siehe Kurve 3 in den Abbildungen 6.5 und 6.6) (vgl. 3, S. 816).
Der Tschebyscheff-Tiefpassfilter besitzt oberhalb der Grenzfrequenz einen noch steileren
Abfall der Verstärkung. Im Durchlassbereich verläuft die Verstärkung jedoch nicht monoton, sondern besitzt eine Welligkeit konstanter Amplitude. Bei gegebener Ordnung ist der
Abfall oberhalb der Grenzfrequenz umso steiler, je größer die zugelassene Welligkeit ist.
Das Überschwingen der Sprungantwort ist noch stärker als bei den Butterworth-Filtern
(siehe Kurve 4 in den Abbildungen 6.5 und 6.6) (vgl. 3, S. 818).
Der Bessel-Tiefpassfilter besitzt ein optimales Rechteckübertragungsverhalten. Die Voraussetzung hierfür ist die Konstanz der Gruppenlaufzeit über ein möglichst großen Frequenzbereich, d.h. die Phasenverschiebung ist in diesem Frequenzbereich proportional
zur Frequenz. Allerdings knickt der Amplitudenfrequenzgang der Besselfilter nicht so
scharf ab wie bei den Butterworth- und Tschebyscheff-Filtern (siehe Kurve 2 in den Ab-
50
WS 2014/15
6.1 Theorie
bildungen 6.5 und 6.6) (vgl. 3, S. 818).
Bild 6.5: Vergleich der Amplitudenfrequenzgänge der verschiedenen Filtertypen:
1 - Tiefpassfilter mit kritischer Dämpfung, 2 - Bessel-Tiefpassfilter,
3 - Butterworth-Tiefpassfilter, 4 - Tschebyscheff-Tiefpassfilter mit 3 dB
Welligkeit (vgl. 3, S. 817).
Bild 6.6: Vergleich der Sprungantworten der verschiedenen Filtertypen: 1 - Tiefpassfilter mit kritischer Dämpfung, 2 - Bessel-Tiefpassfilter, 3 - ButterworthTiefpassfilter, 4 - Tschebyscheff-Tiefpassfilter mit 0,5 dB Welligkeit, 5:
Tschebyscheff-Tiefpassfilter mit 3 dB Welligkeit (vgl. 3, S. 817).
WS 2014/15
51
6 Die Eigenschaften von Messsystemen 2
N
1
2
3
4
5
6
7
i
1
2
1
2
1
2
1
2
3
1
2
3
1
2
3
4
ai
1,0000
1,4142
1,0000
1,0000
1,8478
0,7654
1,0000
1,6180
0,6180
1,9319
1,4142
0,5176
1,0000
1,8019
1,2470
1,4450
bi
0,0000
1,0000
0,0000
1,0000
1,0000
1,0000
0,0000
1,0000
1,0000
1,0000
1,0000
1,0000
0,0000
1,0000
1,0000
1,0000
N
8
9
10
i
1
2
3
4
1
2
3
4
5
1
2
3
4
5
ai
1,9616
1,6629
1,1111
0,3902
1,0000
1,8794
1,5321
1,0000
0,3473
1,9754
1,7820
1,4142
0,9080
0,3129
bi
1,0000
1,0000
1,0000
1,0000
0,0000
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
1,0000
Tabelle 6.1: Die Koeffizienten des Butterworth-Tiefpassfilters
52
WS 2014/15
6.2 Theoretische Aufgaben
6.2 Theoretische Aufgaben
6.2.1 Die Übertragungsfunktion eines Tiefpassfilters 1. Ordnung
Leiten Sie die Übertragungsfunktion eines RC-Tiefpassfilters 1. Ordnung her!
Das Bodediagramm
Wie lässt sich mit Hilfe der Übertragungsfunktion am Beispiel eines Tiefpassfilters 1.Ordnung
das Bodediagramm aufstellen?
6.2.2 Die Übertragungsfunktion eines Tiefpassfilters höherer Ordnung
Die Übertragungsfunktion eines Tiefpassfilters 2. Ordnung
Stellen Sie die Übertragungsfunktion eines Tiefpassfilters 2. Ordnung auf!
Hinweise:
• Es handelt sich um ein Butterworth-Tiefpassfilter.
• Verwenden Sie als Verstärkungsfaktor V = 1.
• Nutzen Sie die Koeffizienten-Tabelle 6.1.
• Die Grenzfrequenz fg sei 3, 1 kHz.
Die Übertragungsfunktion eines Tiefpassfilters 8. Ordnung
Wie lässt sich aus mehreren Tiefpässen 2. Ordnung ein Tiefpassfilter 8. Ordnung realisieren?
Stellen sie mit Hilfe der Übertragungsfunktion 2. Ordnung die Übertragungsfunktion eines Tiefpassfilters 8. Ordnung auf.
Wie lässt sich der Amplituden- und der Phasengang für das Bodediagramm eines Tiefpassfilters
messtechnisch ermitteln? Zeichnen Sie das entsprechende Blockschaltbild.
WS 2014/15
53
6 Die Eigenschaften von Messsystemen 2
6.3 Praktische Aufgaben
6.3.1 Die Simulation des Amplituden- und des Phasenganges eines
Tiefpassfilters höherer Ordnung mit Scilab
Die Erstellung der Übertragungsfunktion eines Tiefpassfilters höherer Ordnung in
Scilab.
Erstellen Sie die Übertragungsfunktion eines Tiefpassfilters 2. Ordnung in Scilab. Nutzen Sie
hierfür die selben Spezifikationen wie in den Vorbereitungsaufgaben. Verwenden Sie die Befehle poly(...) und syslin(...).
Hinweise:
• Es handelt sich um ein Butterworth-Tiefpassfilter.
• Verwenden Sie als Verstärkungsfaktor V = 1.
• Nutzen Sie die Koeffizienten-Tabelle 6.1.
• Die Grenzfrequenz fg sei 3, 1 kHz.
Erstellen Sie nun die Übertragungsfunktion eines Tiefpassfilters 8. Ordnung auf Grundlage einer
Reihenschaltung von vier Tiefpassfiltern 2. Ordnung.
Die Erstellung des Bodediagramms eines Tiefpassfilters höherer Ordnung in
Scilab.
Erstellen Sie das Bodediagramm des Tiefpassfilters 8. Ordnung mit Hilfe der Übertragungsfunktion in Scilab. Der Frequenzbereich soll von 101 Hz bis 105 Hz gehen. Verwenden Sie die
Befehle logspace(...), [...] = repfreq(...) und [...] = dbphi(...).
Listing 6.1: Scilab-Code zum Auslesen der Messwerte
1
2
3
4
5
xdel ( winsid ( ) )
/ / #######################################################
/ / E r s t e l l e n e i n e s l i n e a r n S y s t e m s bzw . T i e f p a s s f i l t e r s 8 . Ordnung m i t H i l f e
der Uebertragungsfunktion
/ / #######################################################
s=poly (0 , ’ s ’ ) ;
6
7
8
9
/ /−−−−−−−−−−−−−−−
/ / B i t t e Ergaenzen !
/ /−−−−−−−−−−−−−−−
10
11
g8= s y s l i n ( ’ c ’ , / / B i t t e E r g a e n z e n ! ) ;
12
13
/ / E r s t e l l e n d e s Bodediagramms d e s T i e f p a s s f i l t e r s 8 . Ordnung
14
15
16
17
f= logspace ( / / B i t t e Ergaenzen ! ) ;
[ / / B i t t e Ergaenzen !]= r e p f r e q ( / / B i t t e Ergaenzen ! ) ;
[Amp, P h a s e ] = d b p h i ( / / B i t t e E r g a e n z e n ! ) ;
18
19
20
21
22
Grafik1=scf (1)
subplot (211)
t i t l e ( " Der A m p l i t u d e n g a n g " , ’ f o n t s i z e ’ , 5 ) ;
p l o t 2 d ( " g l n " , f , Amp, s t y l e = 2)
54
WS 2014/15
6.3 Praktische Aufgaben
23
24
25
26
27
28
29
30
31
x l a b e l ( " F r e q u e n z f i n Hz " , ’ f o n t s i z e ’ , 4 ) ;
y l a b e l ( " A m p l i t u d e i n dB " , ’ f o n t s i z e ’ , 4 ) ;
xgrid ;
subplot (212)
t i t l e ( " Der P h a s e n g a n g " , ’ f o n t s i z e ’ , 5 ) ;
p l o t 2 d ( " g l n " , f , Phase , s t y l e =2 )
x l a b e l ( " F r e q u e n z f i n Hz " , ’ f o n t s i z e ’ , 4 ) ;
y l a b e l ( " P h a s e i n Grad " , ’ f o n t s i z e ’ , 4 ) ;
xgrid ;
6.3.2 Die Messtechnische Ermittlung des Amplituden- und des
Phasenganges eines Tiefpassfilters höherer Ordnung
Das Messen des Amplituden- und des Phasenganges mit dem Oszilloskop
Nehmen Sie den Amplituden- und den Phasengang des Tiefpassfilters 8. Ordnung der blauen
Filterbox auf.
• Nutzen Sie den Frequenzgenerator und das Oszilloskop.
• Stellen Sie am Frequenzgenerator ein Sinus-Signal mit einer Amplitude von 10 V ein.
• Erhöhen Sie Schrittweise die Frequenz .
• Nehmen Sie insgesamt 20 Messwerte auf.
• Verteilen Sie die Messwerte über einen Bereich von 101 Hz bis 104 Hz.
• Nehmen Sie ein paar mehr Messwerte um den Bereich der Grenzfrequenz fg auf.
• Verwenden Sie VRMS der Measure-Funktion zur Messung der Amplitude
• Nutzen Sie Delay1− > 2 der Measure-Funktion zur Messung der Phasenverschiebung.
• Notieren Sie die Messwerte direkt in Scilab.
U e (t )
TP
U a (t )
ch 1
ch 2
Bild 6.7: Das Blockschaltbild zur Aufnahme des Amplituden- und des Phasenganges
6.3.3 Die Auswertung
Vergleichen Sie die Ergebnisse der Messung mit den Ergebnissen der Simulation.
• Plotten Sie mit Hilfe der Messwerte den Amplituden- und den Phasengang zusammen
mit den Ergebnissen der Simulation in ein Bodediagramm.
• Achten sie darauf, dass Sie bei manchen Messwerten der Phasenverschiebung eine Verschiebungskorrektur durchführen müssen.
• Worin unterscheiden sich Bodediagramme von Tiefpassfiltern höherer Ordnung von Bodediagrammen von Tiefpassfiltern geringerer Ordnung?
WS 2014/15
55
Literaturverzeichnis
[1] F ILBERT, Prof. Dr.-Ing. D. ; G ÜHMANN, Prof. Dr.-Ing. C.: Elektronische Messtechnik:
Messen Elektrischer Größen. Institut für Energie- und Automatisierungstechnik, Fachgebiet Elektronische Mess- und Diagnosetechnik, TU-Berlin, Berlin, 2003. http://www.mdt.
tu-berlin.de/fileadmin/fg184/Lehre/Messtechnik/Skript/mt1skript.pdf
[2] N OLL, Peter: Signale und Systeme. Institut für Telekommunikationssysteme, Fachgebiet
Nachrichtenübertragung, TU-Berlin, Berlin, 2011.
[3] T IETZE, Ulrich ; S CHENK, Christoph: Halbleiter-Schaltungstechnik. 12. Aufl. Berlin [u.a.]
: Springer, 2002 (Springer-Lehrbuch). www.tietze-schenk.de. – ISBN 3–540–42849–6
y
56
WS 2014/15
7 Digitale Messkette 1
Lernziele
• Der Studierende ist nach Abschluss des Praktikumsversuches in der Lage die Messkette
bestehend aus Verstärker/Anitialiasing-Filter, Sample&Hold-Glied und Analog-DigitalUmsetzer zu dimensionieren und die Eigenschaften der Komponenten zu charakterisieren.
HINWEIS: Bitte bringen Sie pro Gruppe mindestens ein Paar Kopfhörer mit! Dieses wird
für den praktischen Versuch benötigt!
7.1 Theoretische Aufgaben
7.1.1 Kennlinie eines ADU
Was ist unter einer ADU-Kennlinie zu verstehen? Zeichen Sie beispielhaft die ADU-Kennlinie
eines 3-Bit AD-Umsetzers. Geben Sie die zugehörigen Quantisierungsintervalle an!
7.1.2 Signal-Rausch-Verhältnis (SNR)
Wie ist das Signal-Rauschverhältnis (SNR) definiert?
7.1.3 Quantisierungsrauschen
Wodurch entsteht Quantisierungsrauschen und durch welche Maßnahmen lässt sich das Quantisierungsrauschen verringern?
7.1.4 Clipping
Was ist Clipping?
7.1.5 Abtastung (Sampling)
Was versteht man in der Messtechnik unter Abtastung? Wozu dient das Sample & Hold-Glied?
WS 2014/15
57
7 Digitale Messkette 1
7.2 Praktische Aufgaben
7.2.1 ADU-Kennlinie eines 4-Bit AD-Umsetzers
Nehmen Sie eine ADU-Kennlinie eines 4-Bit AD-Umsetzers auf! Verwenden Sie dazu die
SciLab-Funktion mdt_dataread mit der Einstellung 4 Bit. Messen Sie die Umsetzung für
die ersten drei Codestufen mit der Gleichspannungsquelle nach. Als Input für die vollständige Kennlinie kann ein Dreiecksignal der Frequenz 1 Hz dienen (Warum?).
7.2.2 Clipping
Bei dieser Aufgabe sollen die Auswirkungen des Clipping-Effektes untersucht werden. Hinweis: Bei dieser Aufgabe ist es vorteilhaft, dass Signal gleichzeitig mit dem Oszilloskop darzustellen.
Nehmen Sie dazu mit der USB-Messkarte ni6009 ein Sinussignal der Frequenz 500 Hz und
der Amplitude 3V auf. Benutzen Sie dazu das Scilab-Kommando mdt_dataread. Verwenden
Sie einen Messbereich von [−3V, +3V ] und ein Zeitfenster von 3 Sekunden.
• Nutzen Sie die Funktion mdt_playsnd und hören Sie sich das Signal mit den Kopfhörern
an. Verstärken Sie ggf. das Signal mithilfe von Scilab um die Lautstärke zu erhöhen.
• Erzeugen Sie auch das Spektrum des Signals mit Hilfe der Scilab-Funktion
mdt_spectrum.
Verringern Sie nun den Messbereich auf [−1V, +1V ] und führen Sie eine weitere Aufnahme
durch.
• Hören Sie sich auch hier das aufgezeichnete Signal mit einem Kopfhörer an. Was stellen
Sie fest?
• Vergleichen Sie das Spektrum dieses Signals mit dem zuvor aufgezeichneten Signal.
7.2.3 Rauschen
Erzeugen Sie mit dem Funktionsgenerator ein Dreieck-Signal mit 1/10 Hz und zeichnen Sie
insgesamt 20 Sekunden des Signals mit der USB-Messkarte auf. Verwenden Sie dabei eine Abtastrate von 20 kHz. Wählen Sie den Messbereich so, dass das Signal leicht übersteuert.
Das aufgezeichnete Signal sollte ungefähr zwei Perioden des Testsignals enthalten. Daher ist
auch mindestens eine steigende Flanke vorhanden, die aufgrund der Übersteuerung linear den
gesamten Messbereich durchläuft.
• Isolieren Sie diesen Bereich und führen Sie hierfür eine lineare Regression durch, d.h.
finden Sie eine Funktion f (k) = c0 + c1 k (k - Sampleindex, c0 und c1 - zu findende Parameter), so dass die quadratische Abweichung zwischen den Messwerten s(k) und f (k)
minimal wird!
• Berechnen und plotten Sie nun die Differenz s(k) − f (k), berechnen Sie auch den Effektivwert der Differenz und interpretieren Sie das Ergebnis!
• Welchen SNRr entspricht das (bezogen auf ein vollausgesteuertes Sinussignal) und vergleichen Sie das mit einem SNRi mit ein theoretischen Rauschsignal von Fq = 21 ULSB ?
58
WS 2014/15
7.2 Praktische Aufgaben
• Berechnen Sie nun die effektive Bitanzahl bezogen auf die theoretische Betrachtung.
WS 2014/15
59
8 Digitale Messkette 2
Lernziele
• Der Studierende ist nach Abschluss des Praktikumsversuches in der Lage die Messkette
bestehend aus Verstärker/Anitialiasing-Filter, Sample&Hold-Glied und Analog-DigitalUmsetzer zu dimensionieren und die Eigenschaften der Komponenten zu charakterisieren.
• Weiterhin kennt er sich mit den Einflüssen durch Störspannungen über einer Messgröße
aus. Genauer, deren Einfluss durch Beachtung der Störspannungsunterdrückung z.B. beim
Dual-Slope-Integrierer.
Hinweis: Aufgrund der langen Messdauer der Störspannungsmessung von 5 Minuten bietet es
sich an, die Messung zu einem andren Zeitpunkt im Praktikum durchzuführen. Geeignet wäre
z.B. während der Besprechung der Theorieaufgaben zu starten.
8.1 Theorie
8.1.1 Dual-Slope-Integrierer
Bild 8.1: Dual-Slope-Integrierer
Bild 8.2: Dual-Slope-Verfahren
Der Dual-Slope-Integrierer (Bild: 8.1) besteht im Kern aus einem Integrierer, der während der
Abtastung in 2 Phasen unterteilt wird (Bild:8.2). In der 1. Phase wird die Eingangsspannung
Ue über die Zeit ∆t1 integriert. Wichtig ist hierbei, dass es sich um eine feste Integrationszeit
Ti handelt, denn dadurch ist eine Dämpfung von Störsignalen möglich. Genauer wird darauf im
Abschnitt 8.1.2 eingegangen.
Z
1 Ti
U1 (Ti ) = −
Ue dt
RC t0
60
WS 2014/15
8.1 Theorie
In der 2.Phase wird dann in der Messzeit ∆t2 zurück auf Null integriert. Die dafür benötigte Zeit,
lässt die zu bestimmende Eingangsspannung über die Verhältnisgleichung 8.1 ermitteln.
1
RC
U1 (t2 ) = 0 = U1 (Ti ) +
Z t2
Ure f dt
Ti
durch umformen folgt:
Z Ti
Ue dt =
Z t2
Ure f dt
Ti
t0
Ue = Ure f ·
∆t2
∆t1
(8.1)
8.1.2 Störspannungsdämpfung
Durch den Dual-Slope-Integrierer kann ein sehr gute Störspannungsdämpfung erzielt werden.
Die Stördämpfung ist dabei hauptsächlich von der Beziehung der Integrationszeit Ti des Integrierers zur Frequenz fs des Störsignals abhängig. Unter welchen Bedingungen eine gute
Störspannungsdämpfung gewährleistet ist, kann anhand der Bestimmungsformel und der qualitativen Darstellung dieser ermittelt werden. Deswegen werden diese im Folgenden hergeleitet.
Zunächst wird davon ausgegangen, dass eine Gleichspannung Ux gemessen werden soll, die
von einer sinusförmigen Störgröße us (t) überlagert ist (s. Abb. 8.3). Die Integrationszeit Ti ist
optimalerweise so eingestellt, dass der Mittelwert ū des gemessenen Signals u(t) gleich der
Gleichspannung Ux ist. Die quantitative Darstellung geht jedoch meist nicht über u(t) und ū,
sondern über us (t) und u¯s . Damit ū = Ux erfüllt ist, muss u¯s = 0 gelten.
Bild 8.3: Störspannung
Störfrequenz:
Phase:
Integrationszeit:
u(t) = ux + uˆs · sin(ωst + ϕ)
ωs
fs = T1s = 2·π
ϕ = ωs · ∆t
Ti
Für den Mittelwert des Störsignals gilt dann:
WS 2014/15
61
8 Digitale Messkette 2
1 Ti
uˆs · sin(ωst + ϕ) dt
Ti 0
uˆs
[− cos(ωs Ti + ϕ) + cos(ϕ)]
u¯s =
ωs Ti
Z
u¯s =
α−β
Mit cos(α) − cos(β ) = −2 · sin( α+β
2 ) · sin( 2 ) erhält man:
uˆs
ωs Ti
ωs Ti
· [−2 sin(
+ 2ϕ) · sin(−
)]
ωs Ti
2
2
sin( ωs Ti )
ωs Ti
+ 2ϕ)
u¯s = uˆs · ωs T2i · sin(
2
2
u¯s =
u¯s = uˆs ·
sin(π · fs · Ti )
· sin(π · fs · Ti + 2ϕ)
π · fs · Ti
u¯s = uˆs · si(π · fs · Ti ) · sin(π · fs · Ti + 2ϕ)
(8.2)
Für die relative Messunsicherheit ergibt sich:
Frel =
uˆs
u¯s
=
· si(π · fs · Ti ) · sin(π · fs · Ti + 2ϕ)
Ux Ux
(8.3)
Der maximale/minimale Fehler ergibt sich aufgrund −1 ≤ sin(π · fs · Ti + ϕ) ≤ 1 zu:
Fmax = ±
Bild 8.4: Maximaler Fehler
62
u¯s
uˆs
= ± · si(π · fs · Ti )
Ux
Ux
Bild 8.5: Störspannungsdämpfung
WS 2014/15
8.2 Theoretische Aufgaben
Der Fehler bewegt sich, wie in Bild:8.4 dargestellt zwischen der oberen und unteren SI-Funktion.
Der Fehler wird null, wenn die SI-Funktion null wird (Gl. 8.4) völlig unabhängig von der Phase
des Störsignals.
si(π · fs · Ti ) = 0
(8.4)
Die Gleichung 8.4 wird gelöst, wenn fs · Ti = n gilt, mit n ∈ N .
D.h. der Fehler beträgt immer Null, wenn die Periode des Störsignals ein Vielfaches der Integrationszeit beträgt:
Ts =
1
, F =0
fs
für fs · Ti = n
Ti = n · Ts mit n ∈ N
(8.5)
Die Störspannungsdämpfung ist nun wie folgt definiert:
S = −20 log(
u¯s
)
uˆs
(8.6)
D.h. die Störspannungdämpfung ist unabhängig von der Störamplitude wie Gl. 8.7 zeigt und nur
von der Frequenz und Phase des Störsignals und der Integrationszeit des Dual-Slope-Integrierers
abhängig.
S = −20 log(si(π · fs · Ti ) · sin(π · fs · Ti + 2ϕ))
(8.7)
Um die maximale Stördämpfung zu bestimmen sind die gleichen Überlegungen und Rechnungen durchzuführen wie zur Bestimmung des maximalen Fehlers Fmax = 0.
In der Praxis gilt Ti = 5Ts = 100 ms häufig als gute Dämpfung für Netzbrummen (50 Hz &
60 Hz).
Für die Phase ϕ und Frequenz fs des Störsignals us ergeben sich folgende Auswirkungen auf
die Störspannungsdämpfung.
• bei konstanter Integrationszeit Ti und konstanter Störspannungsfrequenz fs entsteht ein
sinusförmiger Zusammenhang zwischen Störspannung us und der Phase ϕ der Störgröße
(vergl. Gl.: 8.2).
• die Störspannungsdämpfung S, steigt bei konstanter Integrationszeit für zunehmende Störfrequenzen fs und hat da, wo die Integrationszeit ein Vielfaches der Periode des Störsignals beträgt (Bild: 8.5)
Zusammenfassend ist zu sagen, dass über die „richtige“ Wahl der Integrationszeit Ti des DualSlope-Integrierers die Störeinflüsse in einem Signal ausblendbar sind. Welches die „richtige“
Wahl ist lässt sich unter Berücksichtigung der korrelierenden Zusammenhänge von relativer
Unsicherheit 8.2 und Störspannungsdämpfung ermitteln 8.6.
8.2 Theoretische Aufgaben
WS 2014/15
63
8 Digitale Messkette 2
8.2.1 Aliasing
Worum handelt es sich bei Aliasing? Wie kann es vermieden werden?
8.2.2 Entwurf eines Aliasing-Filters
Wie muss ein Aliasing-Filter entworfen werden? Warum spielt dabei auch die Auflösung (Bitanzahl) des AD-Umsetzers eine Rolle?
8.2.3 DNL eines Analog-Digital-Umsetzers
Was ist die differentielle Nichtlinearität eines AD-Umsetzers und wie kann sie messtechnisch
bestimmt werden?
8.2.4 INL eines Analog-Digital-Umsetzers
Was ist die integrale Nichtlinearität eines AD-Umsetzers?
8.2.5 Störspannungsunterdrückung
Vorteil des Dual-Slope-Integrierers
Welchen Vorteil hat der Dual-Slope-Integrierer, bei der Verarbeitung eines der Messgröße Ux
überlagertem Störsignals us ?
Wie kann die Integrationszeit Ti für die 1. Phase des Dual-Slope-Integrierers bestimmt werden,
sodass idealerweise das Störsignal vollständig unterdrückt wird?
In der Praxis wird das Dual-Slope-Verfahren meistens benutzt, um Netzbrummen zu unterdrücken. In diesem Fall wird meistens eine Integrationszeit von 100ms gewählt.
Berechnung
Bestimmen Sie für Fall 1 und Fall 2 aus Abb.:8.6, den Mittelwert des Störsignals u¯s und die
Störspannungsdämpfung S.
Festlegen der Messparameter für Störspannungsmessung
In Abb. 8.7 ist das Front-Panel der Störspannungsmessung mit den einstellbaren Messparametern gezeigt. Nähere Beschreibungen zum Front-Panel finden sich im Abschnitt 8.3.5.
Bestimmen Sie die Parameterwerte für die leeren Felder des Panels so, dass eine sinnvolle
Störspannungsdämpfung gemessen werden kann. Orientieren Sie sich an den vorangegangen
Aufgaben für Ihre Wahl. Wählen Sie außerdem die Frequenzparameter so aus, dass sie zwischen 90-110 Frequenzstützpunkte für die Störspannungsdämpfung S erhalten. Das stellt einen
guten Kompromiss zwischen guter Kurvenauflösung und Messdauer dar.
64
WS 2014/15
8.3 Praktische Aufgaben
Bild 8.6: Spannungsverlauf
8.3 Praktische Aufgaben
8.3.1 Aliasing
In dieser Aufgabe soll der Aliasing-Effekt untersucht werden. Nehmen Sie dazu ein SinusSignal der Frequenz 10 kHz bei unterschiedlichen Abtastfrequenzen auf, beispielsweise 40, 35,
30, 25, 20, 17.5, 15, 12.5 und 10 kHz. Achten Sie darauf, dass kein Clipping auftritt!
• Sehen Sie sich die Spektren der aufgezeichneten Signale an (mit mdt_spectrum)!
• Wo liegen die Signalfrequenzen und warum liegen sie dort?
Die Spektren bestimmter Zeitsignale (z.B. Musik oder Sprache) enthalten viele verschiedene
Frequenzen bis ca. 15 kHz.
• Wie würde sich der Aliasing-Effekt auswirken, wenn ein solches Signal mit einer Abtastrate von 8 kHz abgetastet werden würde?
• Gibt es eine Möglichkeit zur Vermeidung der negativen Effekte?
8.3.2 Aliasingfilter
Nichtsinusförmige Signale enthalten Oberwellen, die bei zu niedriger Abtastrate durch Aliasing
als störendes Rauschen in Erscheinung treten. Dieser Effekt soll untersucht werden.
Erzeugen Sie dazu ein rechteckförmiges Signal mit einer Grundfrequenz von 1kHz. Geben Sie
dieses Signal auf den Filter (blaue Box) und verbinden Sie den Output des Filters mit dem
AD-Wandler. Auf einen weiteren Kanal legen Sie das ungefilterte Signal.
• Tasten Sie das gefilterte und das ungefilterte Signal mit jeweils 48 kHz ab.
HINWEIS: Die Messkarte NI USB-6009 hat eine maximale Summen-Abtastfrequenz
von 48 kHz, d.h. Sie können nur einen Kanal zu einer Zeit mit 48kHz abtasten (die maximale Abtastfrequenz für zwei Kanäle ist dementsprechend 24kHz, usw.).
Stellen Sie beide Spektren mit mdt_spectrum dar. Hinweis: Falls die Spektrallinien schlecht
zu erkennen sind, multiplizieren sie das Signal mit einem Verstärkungsfaktor.
WS 2014/15
65
8 Digitale Messkette 2
• Verringern Sie nun die Abtastrate auf 10kHz und stellen Sie erneut beide Spektren dar.
Interpretieren Sie die Ergebnisse!
8.3.3 FFT-Analyse (optional )
Messen Sie mittels des Oszilloskops ein Rechtecksignal (CH1). Filtern Sie dieses Signal mit
Hilfe der blauen Filterbox und messen Sie das Outputsignal ebenfalls mit dem Oszilloskop
(CH2). Nutzen Sie nun die Funktion: ’math’-> ’Funktion’ -> ’FFT’, um das Frequenzspectrum
der Signale darzustellen (beachten, welcher Kanal jeweils als Quelle eingestellt ist).
Führen Sie nun die Messung für ein 500Hz und ein 1200Hz Rechtecksignal durch.
1. Was passiert im FFT-Fenster mit dem Signal auf Kanal 1 bei Änderung der Frequenz?
2. Was wird mittels der FFT-Funktion dargestellt?
3. Wie lassen sich die gemessenen Signale und Spektren erklären?
8.3.4 ADU-Histogramm-Test
Analog-Digital-Umsetzer sind nichtideale Bauelemente, die ein Signal nie völlig fehlerfrei aufzeichnen können. Daher ist es wichtig, die Qualität eines ADU’s zu testen, um den Einfluss dieser
Störungen abzuschätzen. Es wurde in einer Aufgabe des letzten Übungsblattes bereits gezeigt,
wie die effektive Bitanzahl eines konkreten ADU’s ermittelt werden kann. In dieser Aufgabe
soll ein weiteres Verfahren zur Güteschätzung eines ADU’s eingesetzt werden.
Erzeugen Sie dazu ein Dreiecksignal im Bereich [−2.5, +2.5] V mit einer Frequenz von ca. 3
kHz. Zeichnen Sie nun für 60 Sekunden das Signal bei einer Abtastfrequenz von 40 kHz und
einer Messbereichsamplitude von 2V auf. Da es sich um ein Dreieck-Signal handelt sollten alle
Codes des ADU’s, bis auf die Codes am Rand, gleich häufig auftreten. Die Codes am Rand (0
und 214 − 1) sind auf Grund der Übersteuerung (Clipping) wesentlich häufiger vorhanden.
• Stellen Sie das Histogramm des aufgezeichneten Signals dar! Sie können dazu die Funktion mdt_histogram benutzen, welche die Häufigkeit pro Code bestimmt. Die Randcodes
werden von der Funktion bereits beseitigt.
• Berechnen Sie weiterhin die differentielle Nichtlinearität (DNL) und interpretieren Sie
das Ergebnis!
8.3.5 Störspannungsunterdrückung
In diesem Versuch soll anhand eines durch „Labview“ vorgefertigten Programms, der Verlauf
der Störspannungsdämpfung S eines Störsignals mit der Frequenz fs nachgebildet werden .
Die Frequenz fs soll erhöht werden, sodass nach Beendigung der Messung ein mit Bild:8.5 vergleichbares Ergebnis entsteht.
Hinweise zum Front Panel (Bild:8.7):
• auf dem Bildschirm wird nach Abschluss der Messung die Störspannungsdämpfung angezeigt
• mögliche Signalformen sind: Dreieck, Rechteck und Sinus
66
WS 2014/15
8.3 Praktische Aufgaben
• durch Vpp wird die Peak to Peak Spannung des Störsignals festgelegt
• mit Offset stellt man den Wert der gleichspannungsförmigen Messgröße ein
• die Startfrequenz steigt um die Höhe des Inkrements bis die Endfrequenz erreicht ist
• die Sampleanzahl legt fest wie viele Abtastwerte pro betrachteter Störfrequenz fs gemessen
werden
• über die Integrationszeit wird die Dauer der 1.Phase ∆t1 des Dual-Slope-Integrierers als
konstant festgelegt (Bild:8.2). Das bedeutet, dass die Störspannungsdämpfung nur noch
mit Änderung der Störfrequenz variiert.
Zur Durchführung des Versuchs sollen die, in der Theorie, bestimmten Werte verwendet werden. Nach Beendigung der Messung werden Ihnen die Störspannungsdämfungen S in einer .txt
Datei ausgegeben. Laden Sie den Inhalt mit Hilfe des folgendes Befehls in Scilab ein:
–>M=fscanfMat(’Dateiname.txt’);
• Plotten Sie aus den Messwerten die Störspannungsdämpfung als Funktion der Störfrequenz fs .
• Plotten Sie nun die Störspannungsdämpfung in normierter Darstellung, wie in Abb.:8.5.
D.h. die Störspannungsdämpfung ist in Abhängigkeit des Produkts aus Störfrequenz fs
und Integrationnszeit Ti darzustellen.
• Berechnen und plotten Sie den maximalen Fehler
Bild 8.7: Front Panel
WS 2014/15
67
9 Leistungsmessung 1
Lernziele
• Leistungen bei sinusförmigen Strömen und Spannungen
• Blindleistungsmessung mittels Dreiphasennetz
9.1 Einleitung
Es werden sinusförmige Spannungen und ein sinusförmige Ströme an unterschiedlichen Verbrauchern gemessen und hierdurch Schein-, Wirk- und Blindleistung bestimmt. Um die Blindleistung messtechnisch zu ermitteln, wird die Phasenverschiebung der Spannungen im Drehstromnetz ausgenutzt. Als ohmsches Element wird eine Glühlampe verwendet. Zur Untersuchung des
Einflusses eines induktiven Elements wird eine Leuchtstoffröhre mit Drosselspule betrachtet.
Außerdem wird das Verhalten einer Energiesparlampe erörtert.
9.2 Theorie
9.2.1 Messgrundlagen
Messgrundlagen zur Leistungsmessung finden Sie unter anderem im Auszug aus dem „HAMEG
Instruments 8kW Power-Meter HM8115-2 Handbuch“ im Anhang.
9.2.2 Leuchtstoffröhre
Eine Leuchtstoffröhre ist eine Niederdruck-Gasentladungslampe, die auf der Innenseite mit
einem fluoreszierenden Leuchtstoff beschichtet ist. Sie ist mit Gas, z.B. Quecksilberdampf und
Argon, gefüllt, dessen Ultraviolettstrahlung von der Leuchtstoffbeschichtung in sichtbares Licht
umgewandelt wird. Zum Einschalten ist eine Zündspannung nötig, die die Gasfüllung ionisiert
und elektrisch leitfähig macht.
Es entsteht ein Niederdruck-Plasma, das so lange erhalten bleibt, wie die Brennspannung (abhängig von Röhrenlänge und Gasdruck) erhalten bleibt. Das Plasma hat einen negativen differentiellen Innenwiderstand, d.h. die Spannung sinkt bei zunehmenden Strom. Es ist also eine
Strombegrenzung notwendig. Deshalb werden Gasentladungslampen mit einem Vorschaltgerät
betrieben, das aus einer Drosselspule in Reihe zur Leuchtstoffröhre und einem Starter besteht
(siehe links oben in Bild 9.1). Die Drossel hat die Aufgabe die zur Zündung erforderliche Spannung zu erzeugen und den Betriebsstrom zu begrenzen. Dieses konventionelle Vorschaltgerät
(KVG) hat z.B. bei einer 58W -Röhre eine Verlustleistung von etwa 12W .
68
WS 2014/15
9.2 Theorie
Der Starter sorgt für die Zündung und ist parallel zur Leuchtstoffröhre geschaltet. Er besteht
aus einer Glimmlampe mit Bimetallstreifen als Elektroden und parallel dazu einem Entstörkondensator. Nach dem Einschalten liegt zunächst die gesamte Netzspannung am Bimetallstarter
an, was zu einer Glimmentladung führt (siehe oben rechts in Bild 9.1). Die Bimetallstreifen
erwärmen und verbiegen sich, so dass ein Kurzschluss entsteht (siehe links unten in Bild 9.1).
Dadurch fließt ein großer Strom durch die Heizwendeln in der Leuchtstoffröhre und sie beginnen zu glühen. Die dabei entsendeten Elektronen reichern das Gas mit Ladungsträgern an.
Die durch den Kurzschluss am Starter fehlende Glimmentladung lässt das Bimetall abkühlen
und der Kontakt öffnet sich wieder. Jetzt besitzen die Glimmlampe und die noch nicht gezündete Leuchtstoffröhre einen hohen Widerstand, wodurch der Strom in der Drosselspule schnell
abfällt und durch Selbstinduktion entsteht kurzzeitig eine hohe Spannung, die die mit Ladungsträgern
angereicherte Röhre nun zündet (siehe rechts unten in Bild 9.1).
Starter
Glimmentladung
Elektroden
Leuchtstoffröhre
Stromfluß
Drossel
Spannungsquelle
230 V
Glühemission
230 V
230 V
Bild 9.1: Startvorgang
9.2.3 Energiesparlampe
(Quelle: http://de.wikipedia.org/wiki/Kompaktleuchtstofflampe)
Die Funktion der Kompaktleuchtstofflampen entspricht im Wesentlichen derjenigen der konventionellen Leuchtstofflampen. Sie arbeiten diesen gegenüber jedoch bei höherem Innendruck,
sind daher kleiner und haben eine höhere Leuchtdichte. Der Druckaufbau beziehungsweise die
Verdampfung des Quecksilbers geschieht beim Einschalten durch Vorheizung der Kathoden
beziehungsweise Heizfäden (direkt geheizte Kathoden) und nachfolgender Eigenerwärmung.
Daher erreichen Kompaktleuchtstofflampen nicht sofort ihre volle Leuchtkraft.
WS 2014/15
69
9 Leistungsmessung 1
Bild 9.2: Im Sockel befindliches EVG einer Energiesparlampe mit 12 Watt Leistungsaufnahme (Quelle: Wikipedia)
Das bei Energiesparlampen im Sockel eingebaute, heute meist elektronisch arbeitende Vorschaltgerät (EVG) heizt bei Lampenstart zunächst die Kathoden, indem diese im Stromkreis in Reihe
zu einem PTC-Widerstand liegen (siehe Bild 9.2. Hat sich dieser durch Stromfluss erwärmt,
wird er hochohmig und gibt die Entladungsstrecke für das Vorschaltgerät frei - die Lampe
zündet. Die Gasentladungsstrecke arbeitet an einem Inverter, das heißt die Netzwechselspannung wird zunächst gleichgerichtet, um anschließend wieder in eine Wechselspannung höherer Frequenz (etwa 45 kHz) umgewandelt zu werden. Die Wechselrichtung erfolgt mit zwei
Schalttransistoren. Diese Wechselspannung gelangt über eine Ferritkern-Drossel zum Lampenstromkreis. Die Drossel ist aufgrund der höheren Arbeitsfrequenz gegenüber 50 Hz-Drosseln
konventioneller Vorschaltgeräte sehr klein, verlustärmer und materialsparend.
Inzwischen gibt es auch elektrodenlose Energiesparlampen, diese regen die Gasentladung kapazitiv an und vermeiden dadurch die Verschleißprobleme der Kathoden vollständig. Sie sind
unbegrenzt schaltbar und noch etwas effektiver als Modelle mit Glühkathoden.
9.2.4 Dreiphasenverläufe
Die drei Spannungen U1 , U2 , U3 an den Leitern L1 , L2 , L3 haben zum gleichen Zeitpunkt verschiedene Amplitudenwerte und sind gegeneinander um 120◦ verschoben. Analog verhält es
sich mit den Strömen (Bild 9.3).
Durch die Phasenverschiebung von 120◦ erhält man zwei verschiedenen Spannungsamplituden.
In Deutschland beträgt die Spannung zwischen zwei Außenleitern jeweils Uδ = 400V und zwis-
70
WS 2014/15
9.3 Theoretische Aufgaben
Bild 9.3: Spannungsverlauf im Dreiphasennetz (Quelle: Wikipedia)
chen einem Außenleiter und dem Neutralleiter N beträgt die Spannung UY = 230V (Bild 9.4).
Bild 9.4: Darstellung der Netzspannungen als Raumzeiger
9.3 Theoretische Aufgaben
9.3.1 Leistungsdefinitionen
Leiten Sie die Formeln für die unterschiedlichen Leistungen sinusförmiger Größen her und
vereinfachen Sie diese soweit wie möglich. Gehen Sie von den allgemeinen Definitionen für
Schein-, Wirk-, Blind- und Augenblicksleistung aus.
9.3.2 Leistungsfaktor
Wie berechnet sich der Leistungsfaktor für sinusförmige Größen?
WS 2014/15
71
9 Leistungsmessung 1
9.3.3 Scheinleistungsmessung
Wie lässt sich die Scheinleistung in der praktischen Aufgabe 9.4.1 messtechnisch bestimmen?
Welche Geräte werden benötigt?
9.3.4 Wirkleistungsmessung
Wie kann man die Wirkleistung in der praktischen Aufgabe 9.4.1 an der Glühlampe (ohne
Dimmer) und den anderen beiden Lampen messtechnisch bestimmen? Welche Geräte werden
benötigt? Zeichnen Sie die Verbindungspfade in die Schaltung im Anhang ein!
9.3.5 Blindleistungsmessung
Wie lässt sich die Blindleistung in der praktischen Aufgabe ?? ohne aufwendige Phasendreherschaltung mit Hilfe des Dreiphasennetzes einfach messen? Zeichnen Sie die Verbindungspfade in die
Schaltung im Anhang ein!
Spannungs- und Stromverläufe
Wie sehen die prinzipiellen Spannungs- und Stromverläufe an der Glühlampe, an der Energiesparlampe und an der Leuchtstoffröhre aus?
9.4 Praktische Aufgaben
9.4.1 Messung sinusförmiger Größen
Messdatenaufnahme mit der Messkarte
Messen Sie den Strom und die Spannung der Glühlampe ohne Dimmer. Nehmen Sie 100 Perioden von Strom und Spannung mit der Messkarte auf. Wiederholen Sie die Messung bei
Leuchtstoff- und Energiesparlampe.
Auswertung der Messdaten
Schreiben Sie zwei Scilabfunktionen, die aus den Messwerten der Wandlerausgänge die Scheinbzw. Wirkleistung berechnen.
Listing 9.1: Beispielfunktion für Scheinleistung
1
2
3
4
5
6
7
8
9
f u n c t i o n S_Ausgabe = S c h e i n l e i s t u n g ( U_mess , I _ m e s s )
/ / Wandlerübersetzungen
Vu = 1 0 / 5 5 6 ;
/ / Vu=U_s / I _ e
Vi = 1 0 / 0 . 9 ;
/ / Vi=U_s / U_e ;
..........................
/ / zu v e r v o l l s t ä n d i g e n
..........................
S_Ausgabe = ’ S= ’ + s t r i n g ( S ) + ’ VA’ ;
endfunction
72
WS 2014/15
9.5 Anhang
Oszilloskop
Bestimmen Sie die Leistungen nun mit Hilfe des Oszilloskops. Bestimmen Sie die Blindleistung, indem Sie die Dreisphasenmessung durchführen und indem Sie diese aus Wirk-und Scheinleistung berechnen. Vergleichen und erklären Sie die Ergebnisse.
9.5 Anhang
• Auszug aus „HAMEG Instruments 8kW Power-Meter HM8115-2 Handbuch“
• Schaltung für die praktischen Aufgaben
WS 2014/15
73
/ ? 2
-
!" !
$ %%
' ! %%
)
& % % ( +
. +
#
, -
# & % % (
-
-
./
) 0 3 4
./
./
(
1 2 0 - ./( 1 2 ) 3 4
, * #
* . ( 0 + 0 2 , - & % % 2 A B C 3
D 2 / & % % ( * & % % # 2
* ( $ !
% * %, # , - % % * %, ) 0 3 4
(
( ( 0
* & % % @ % %
./
& # 6 9 < 5 % % 0 0 9 < 5 / E
7
B 7
- 0 7
+ %
# 6 # 7
2
%, 4 ' & % % F : 9 7 % 5 0 = 5 = 7 % 7
2
1 2 / . 0 * 1 2 / # 2
3 3 3 ! 4 5 0 2
. 6 # , - 4 * 2
. 6 # 7
9 ) 5
0 . 5 / ( ) 0 ) 4 + 8 4 8 5
3 4 (
! - ! . / ) 0 ! 3 4
/ # * * * 8 ./
! 2 2/ 8 # ! 7 6
* 2/ * 2
#
8 7
7
! " " . & % % %
% 8 2 / . ! ) 0 ! 5 0 ! %, 4 ' # 9 : 7 % 5 0 ; < = % 7
2 > . % , # ) 0 0 0 0 0 0 0 0 0 0
# $ # % & ! " " 0 0 ) * + * *
( (
' " / - E .
%, % & % % #
' ) 0 5 0 9 ! ! ) 0 ! 5 ! ) 0 5 ) 4 + 6 7 8 5
3 4 # ( * . % 7
G
, -
% * * ( , 7
2& * 2
: ) 0 0 0 0 0 0 0 0 0 0
# $ # % & & ( ) * +, * ,
$ & - & ' " + & ;
<
/ # * E % % 2 / E % 2/ * 2 1 H 5 5 7 0 % E & % % * 8 , E 7
* ? ( 8 ( % * 7
* ( ( 2 29 < 5 % , - 2
' ;
" ' ! " " 9 9
9 9
9
<
* . 2
+ ( 8 * %6 ( ( D( (
% %, 2 , - 8 ( ( , * 0 8
0
2
8 0 #
I
* (
( $ & 0I ( ( ! 8 I ( 8 * ( %6 + * ( 2 ( + 0 % K 2 / 2 ! L 2
4 M * G
4 ' N M) * 0 . % 6 ? ) 0 B 2 5 . C / 3 4 ) 0 B 0 2 0 5 0 2 0 " 0 0 (
) 9 2A 2 " = " " ) * ? " ) 4 @ <> $ " " ;
<
A $ ) 4 @ <> =
" &
/ O %
2!
" & ? " "
$ 0I L ( ( ( G 4
$ %% 4
! %% 4
4
(
& % % & % % $ * !
* % 6 G 4
$ %% 4
! %% 4
4
* 4
&
& % % %% * ( $ !
4 $
%%
M! %%M ) 4 < >
$ ;
<
% % 2 4 0 2 7
2
> - 7
2
% 6 ( 7
J 2 % % 7
%% * B / % % +
( 6 * % * 6 7
0
% 6 E 6 * M! %%M > " = ;
. / ? " : " : . / <
/ + # , - # 0 # 2
I 2 * * %, %%
/ + % * ( 2
= + 4 $
* % 6 ! " ;
" !
# 9 " " + + . E " : " " ? <> 3 " < : " " & $ " / <> " " <
" &
! (
8 <
;
+
;
;
= # , - * 7
( 2 . + 2
! # ( ( % * 7 , - ( P > , ( 8 2Q * 8 2 / 7
? + + 8 & 2 ! * 7
* 2 8 * 0 + ( + % 2 / * 7
R ( 2
% , + ( * 2 I % * ( %,
% 2 8 % 0 ( 0 * 2
7
' 4 < 9 H 05 5 J)4 F 9 09 H D = " / & % % * 8 G
%%
$
'
4 T T 4 9 9 U 0 V 9 < 5 9
/ & % % * G
4 )M
9 ! %% 4 F 9 09 H M T T 4 F
< : & 2 / G $
!
4 4 4 %% 4 4 %%
0I
(
( (
2
*
7
7
& % % & % % )9 Y 4 T T MW 3 T T N 9 3 T T 9 < <
4 4 9
N 9
4 $
%%
? S
4 $
/ + % . % . G
. ' )
? ! ) 0 0 : 4 4 4 4 4 + % ( ( F # : # : ? ! ) " 9 )9 MT T < 9
T T <
5 05 5 %%
M ! % % 4 9 < 5 M F 5 0 5 4 9 < 5 5 / G
F ' M)
4 T T ' M ) M 4 T T T W 3 <
'
4 T
F
4 T
%%
= " X
/ G
* % 6 F 9 9
) M 9 5 T T ! %%4 M) 3 7 F 3 7 5 0H
W T T X 4
F 0H
T T X
<
M' M)
0H
T M< 9 H MF 9 09 H 4 F U 5 5 / + % . * G
F U 5 5 . 4 T T 4 T T T T T T 4 5 0V 9 ;
9 < 5 5 * 2 / 0 A ( C 2 / A ( * 4 9 3 9
, - 2 /
I % * 6 * * - C 2
7
* 0
( 0
4 9 < 5 5 9 3 F U 5 5 9 4 F 9 U ; * *
WS 2014/15
Kondensator
Energiesparlampe
Leuchtstoffröhre
Starter
Glühlampe
Dimmer
Strommessung über
Stromwandler oder verbinden
Stromwandler +
Filter
Bild 9.5: Schaltung für die praktischen Aufgaben
77
PE
PE
Zur Spannungsmessung
über Spannungswandler
Spannungswandler +
Filter
N
Strommessung über
Stromwandler oder verbinden
N
Drossel
Strommessung über
Stromwandler oder verbinden
L1
L1
Strommessung über
Stromwandler oder verbinden
L2
L2
Zur Spannungsmessung
über Spannungswandler
L3
L3
ADU+PC
ADU+PC
9.5 Anhang
78
Kondensator
Energiesparlampe
Leuchtstoffröhre
Starter
Glühlampe
Dimmer
Strommessung über
Stromwandler oder verbinden
Stromwandler +
Filter
Bild 9.6: Schaltung für die praktischen Aufgaben
WS 2014/15
PE
PE
Zur Spannungsmessung
über Spannungswandler
N
Strommessung über
Stromwandler oder verbinden
Spannungswandler +
Filter
N
Drossel
Strommessung über
Stromwandler oder verbinden
L1
L1
Strommessung über
Stromwandler oder verbinden
L2
L2
Zur Spannungsmessung
über Spannungswandler
L3
L3
ADU+PC
ADU+PC
9 Leistungsmessung 1
10 Leistungsmessung 2
Lernziele
• Leistungen bei nichtsinusförmigem Strom und sinusförmiger Spannung bei Verwendung
eines Wechselstromstellers (Dimmer)
• Bestimmung des Klirrfaktors
10.1 Einleitung
Nachdem Sie sich im Teil 1 des Leistungsmessungsversuchs mit der Bestimmung von Leistungen sinusförmigen Größen beschäftigt haben, wird nun auf die Besonderheiten bei nicht
sinusförmigen Größen eingegangen. Das Verhalten von Spannung und Strom soll durch Bestimmung der Wirk-, Blind- und Scheinleistung vor und hinter einer Glühlampe mit Dimmer
analysiert werden. Die Schaltung für die Versuche ist im Anhang zu sehen.
10.2 Theorie
10.2.1 Dimmer
Dimmmer sind Thyristor- oder Triacsteller zur Helligkeitsregelung von Glühlampen. Bei dem
in diesem Versuch verwendeten Dimmer handelt es sich um einen Phasenanschnittdimmer. Die
Phasenanschnittssteuerung ist eine Methode zur Leistungsregelung des Verbrauchers bei Wechselspannungsbetrieb.
Der Stromfluß wird meist durch einen Triac gesteuert. Nach einem Nulldurchgang einer Wechselspannung bzw. Wechselstroms leitet der Triac erst wieder nach einem Zündimpuls. Ab dieser
Phase wird der Verbraucher mit Energie versorgt. je später der Triac also zündet desto geringer
die Leistung. Da diese Schaltvorgänge mit 50 Hz (also 100mal pro Sekunde) passieren, wird es
vom menschlichen Auge nur als heller oder dunkler wahrgenommen. Mit dem Drehschalter am
Dimmer kann man den Zeitpunkt bzw. die Phase des Phasenanschnitts stufenlos vorgeben.
In Bild 10.1 ist der Schaltplan für die Phasenanschnittssteuerung dargestellt. Zur Verzögerung
der Wechselspannung dienen dabei der Widerstand R1 , sowie die Kondensatoren C1 und C2
und die Spule. Damit wird die Schwellspannung des Diac Di erst nach dem Nulldurchgang
der Wechselspannung erreicht und somit der Triac Tr, der letztendlich die Lampe hinter der
Sicherung steuert, erst dann gezündet. Mit dem Potentiometr P kann die Phasenverschiebung
eingestellt werden. Je kleiner sein Widerstand ist, desto früher zünden der Diac und der Triac und desto schneller leuchtet die Lampe. Die Sicherung, „Radial Thermal Cutoff“ und der
Kondensator M dienen zum Schutz der Schaltung.
WS 2014/15
79
10 Leistungsmessung 2
Spule
L
Radial
Thermal
Cutoff
Sicherung
Schalter
Voreingestelltes
Potentiometer
P
Tr
R1
M
R3
Di
C1
C2
N
Bild 10.1: Phasenanschnittsteuerung
10.3 Theoretische Aufgaben
Funktionsweise des verwendeten Dimmers
Beschreiben Sie die Funktionsweise der im Versuch verwendeten Glühlampe mit Dimmer.
Leistungen in Abhängigkeit vom Zündwinkel
Berechnen Sie Wirk- und Scheinleistung für eine sinusförmige Spannung und einen nichtsinusförmigen Strom, der vom Anschnittswinkel ϑ abhängt (Bild 10.2). Wie würde man nun die
Blindleistung berechnen?
Leistungsfaktor
Wie berechnet man den Leistungsfaktor in Abhängigkeit vom Zündwinkel ϑ ?
Grundschwingungsblindleistung
Was versteht man unter der Grundschwingungsblindleistung? Nennen Sie eine Möglichkeit die
Grundschwingungsblindleistung zu bestimmen.
80
WS 2014/15
10.4 Praktische Aufgaben
Bild 10.2: Verlauf von Spannung und Strom
Verzerrungsleistung
In welchen Fällen tritt die Verzerrungsleistung auf und wie ist sie definiert?
Klirrfaktor
Was gibt der Klirrfaktor des Stromes an und wie berechnet sich dieser?
Zündwinkel
Wie lässt sich der Zündwinkel des Dimmers mit dem Oszilloskop bestimmen?
10.4 Praktische Aufgaben
10.4.1 Aufnahme von Messwerten zur Leistungsanalyse
Messwertaufnahme Schein- und Wirkleistung
Nehmen Sie die notwendigen Messwerte für eine Schein-, Wirk und Blindleistungsbestimmung
für die gegebenen Zündzeiten mit Hilfe des Oszilloskops auf. Warum ist es sinnvoller die Leistung vor dem Dimmer aufzunehmen?
Empfohlene Vorgehensweise:
• Wandlerausgänge für Strom- und Spannungswandler auf dem Oszilloskop anzeigen lassen
• Die Cursor auf die gewünschte Zündzeit einstellen und danach den Dimmer einstellen
• Math- und Measure-Funktionen analog zu Leistungsmessung I nutzen
WS 2014/15
81
10 Leistungsmessung 2
• Werte direkt in Scilab speichern
Listing 10.1: Mögliche Zündzeitpunkte
1
d e l t a T =[1.2 2.0 2.8 3.6 4.4 5.2 6.0 6.8 7.6 8.4 8.8]∗10^ −3;
Messwertaufnahme Grundschwingungsblindleistung
Nehmen Sie die notwendigen Messwerte für die Grundschwingungsblindleistungsbestimmung
für dieselben Zündzeiten mit Hilfe des Oszilloskops auf, indem Sie die Dreiphasenmessung aus
Leistungsmessung I durchführen. Warum wird mit dieser Messmethode in diesem Fall nur die
Grundschwingungsblindleistung bestimmt?
Strom ohne Dimmer
Messen Sie den Strom durch die Glühlampe ohne Dimmer, um den später den theoretischen
Verlauf zeichnen zu können.
10.4.2 Auswertung der Messwerte
Vergleich von Schein-, Wirk- und Blindleistung
Bestimmen Sie die Gesamtblindleistung. Zeichnen Sie die Messwerte und die theoretisch erwarteten Werte für Schein-, Wirk- und Gesamtblindleistung in ein Diagramm über dem Zündwinkel ein.
Analyse der Blindleistung
Bestimmen sie aus den Messwerten Gesamtblindleistung, Grundschwingungsblindleistung und
Verzerrungsleistung. Zeichne Sie diese drei Leistungen in ein Diagramm über dem Zündwinkel.
Klirrfaktor
Stellen Sie die Abhängigkeit des Klirrfaktors vom Zündwinkel grafisch dar.
10.5 Anhang
• Schaltung für die praktischen Aufgaben
82
WS 2014/15
WS 2014/15
Kondensator
Energiesparlampe
Leuchtstoffröhre
Starter
Glühlampe
Dimmer
Strommessung über
Stromwandler oder verbinden
Stromwandler +
Filter
Bild 10.3: Schaltung für die praktischen Aufgaben
83
PE
PE
Zur Spannungsmessung
über Spannungswandler
Spannungswandler +
Filter
N
Strommessung über
Stromwandler oder verbinden
N
Drossel
Strommessung über
Stromwandler oder verbinden
L1
L1
Strommessung über
Stromwandler oder verbinden
L2
L2
Zur Spannungsmessung
über Spannungswandler
L3
L3
ADU+PC
ADU+PC
10.5 Anhang
11 Messbrücken
Lernziele
• Kapazitätsmessung nach Wien
• Messtechnische Bestimmung der Empfindlichkeit nach Wien
• Bestimmung des Eigenfehlers (absolut, relativ)
• Fehlerrechnung!
11.1 Einleitung
Messbrücken bestehen aus zwei parallel geschalteten Spannungsteilern, deren Spannungsabgriffe mit einem Nullindikator verbunden sind. Es existieren zwei Arten von Messbrücken als
Messverfahren: Gleich- und Wechselstrommessbrücken (Abbildung 11.1). Dieser Versuch befasst sich mit dem Umgang mit Wechselstrommessbrücken. Bei den Wechselstrommessbrücken
muss (v.a. auch beim Abgleich) beachtet werden, dass die Impedanzen aus zwei Anteilen bestehen (Betrag und Phase oder Real- und Imaginärteil). Auch die auf die Messbrücke wirkenden
Störeinflüsse müssen beachtet werden.
Messbrücken
Gleichstrommessbrücken
Wheatstone-Brücke
Thomson-Doppelbrücke
Messung mittlerer und
hoher Widerstände
Messung sehr niedriger
Widerstände
Wechselstrommessbrücken
Messung von Scheinwiderständen
Frequenzmessung
Klirrfaktormessung
Bild 11.1: Messbrücken (1)
11.2 Theorie zur Impedanzmessung mit einer
Wechselstrommessbrücke
Bei diesem Versuch sollen nach dem Abgleichverfahren Impedanzen mit der Wechselstrommessbrücke bestimmt werden. Außerdem soll die Empfindlichkeit der Messbrücke bestimmt werden.
84
WS 2014/15
11.2 Theorie zur Impedanzmessung mit einer Wechselstrommessbrücke
Da beim Versuchsaufbau kapazitive und induktive Störeinflüsse (Bild 11.2.2) eine große Rolle
spielen, müssen also entsprechende Gegenmaßnahmen getroffen werden.
11.2.1 Unsicherheitsrechnung
In diesem Abschnitt soll die Berechnung der Messunsicherheit eines Messergebnisses erläutert
werden.
• Für ein vollständiges Messergebnis muss neben dem Messergebnis und der Einheit immer
noch die Messunsicherheit angegeben werden, welche für diese Messung gilt. Es gilt:
x = xc ± k · u
wobei u die Messunsicherheit angibt und k den Faktor der statistischen Sicherheit.
• Für eine statistische Sicherheit von P = 0.68 ist k=1 und für P = 0.99 ist k = 2.6.
• Die Messunsicherheit berechnet sich durch
q
s2esu + s2x
wobei sesu häufig aus dem Handbuch des Messinstrumentes entnommen werden kann.
Unsicherheitsfortpflanzung
Nähert man u durch eine Taylorreihe an, die nach der ersten Ableitung abebrochen wird, an so
erhält man nach der Gauss’schen Fehlerfortplanzung für die Messunsicherheit von u:
N
u2y
=∑
i=1
∂f
∂ xi
2
u2xi
11.2.2 Messbrückenaufbau, Bauteilwerte- und toleranzen
Die Tabelle der Bauelemente zeigt deren ideale Werte und deren Bauteiltoleranzen. Für eine
möglichst genaue Fehlerrechnung wurden diese bekannten Bauelemente im Voraus mit der Industriemessbrücke gemessen. Diese gemessenen Bauteilwerte sind auf den Bauteilboxen vermerkt und sind für die Fehlerrechnung diesen zu entnehmen.
Z1
C1
Z2
R1
Ud
R3
Oszilloskop
AC
AC
Trenntrafo
im
Ub
U0
XY-Betrieb
R2
Z3
Z4
Bild 11.2: Wechselstrommessbrücke
WS 2014/15
R4
C2
Bild 11.3: Schaltplan
85
11 Messbrücken
Z1
C1
R1
Z2
R2
C2
Z3
R3
Z4
R4
U0
Ub
100nF
2% Toleranz
100Ω
0, 1% Toleranz
100 + 1k + 10kΩ
Potentiometer
5% Toleranz
100nF
2% Toleranz
1kΩ
0, 1% Toleranz
100 + 1k + 10kΩ
Potentiometer
5% Toleranz
±5V
1kHz
Tabelle 11.1: Bauelemente (0,02% genaue Angabe auf den Gehäusen!)
11.3 Theoretische Aufgaben
11.3.1 Vergleich realer/idealer Kondensator
1. Beschreiben Sie die Eigenschaften eines idealen Kondensators, die Messung und zeichnen Sie das zugehörige Ersatzschaltbild.
2. Erläutern Sie die Eigenschaften und das vollständige Ersatzschaltbild eines realen Kondensators (im Vergleich zum idealen Kondensator).
3. Welche Möglichkeiten zur Messung bestehen?
11.3.2 Kapazitätsmessung
Nennen Sie Vor- und Nachteile von Messbrücken zur Bestimmung von Kapazitäten.
11.3.3 Abgleichbedingung
1. Leiten Sie die Abgleichbedingungen für die Wechselstrommessbrücke her.
2. Wie bestimmt man den ohmschen und den kapazitiven Anteil einer zu messenden Impedanz
in der Wien-Messbrücke?
11.3.4 Empfindlichkeit
1. Was sind die Anforderungen an die Brücke, wie bestimmt sich die Empfindlichkeit und
wie wird ihr Maximum erreicht?
2. Wie lässt sich die Empfindlichkeit messtechnisch ermitteln?
86
WS 2014/15
11.4 Praktische Aufgaben
11.3.5 Fehler
1. Was ist der Eigenfehler und wie wird er bestimmt? ( Diese Aufgabe wird zusammen im
Labor bearbeitet. )
2. Dürfen frequenzabhängige Schaltelemente zur Rausch- und Brummverminderung im Nullzweig angeschlossen werden?
3. Wodurch werden die Fehlergrenzen einer Messbrücke bestimmt? Erläutern Sie die Fehlerrechnung.
11.4 Praktische Aufgaben
Bei allen praktischen Ausführungen sollte darauf geachtet werden, dass am Ausgang des Trenntransformators eine 1kHz Wechselspannung mit gleichbleibendem Effektivwert anliegt, da
dieser stark lastabhängig reagiert. Eine geeignete Betriebsspannung der Brücke wäre eine sinusförmige Spannung mit einem Effektivwert von U = 5 Volt. Bei der Widerstands- und Brückenspannungsmessung ist darauf zu achten, dass alle anderen Messgeräte ausgeschaltet sind.
11.4.1 Aufbau
Die Wien’sche Wechselstrom-Messbrücke zur Bestimmung von Impedanzen ist zu dimensionieren, aufzubauen und auf Null abzugleichen. Erläutern Sie den Einsatz von Nullindikatoren.
C1
R1
R3
Oszilloskop
AC
Trenntrafo
im
Ub
XY-Betrieb
R2
R4
C2
Bild 11.4: iVersuchsaufbau
WS 2014/15
87
11 Messbrücken
11.4.2 Empfindlichkeit und Eigenfehler
1. Bauen Sie die Brücke mit bekannten Impedanzen auf und messen sie anschließend UD
2. Berechnen Sie die Unsicherheit aller Impedanzen mit einer statistischen Sicherheit von
P = 0.99. Beachten Sie, dass die Industriemessbrücke eine Toleranz von 0.02% aufweist
und das Fluke eine Toleranz von 0.01%.
3. Bestimmen Sie den in der Theorie besprochenen Eigenfehler und dessen Unsicherheit.
Wie lässt sich das Ergebnis interpretieren?
4. Stellen Sie nun die Empfindlichkeit der Messbrücke fest.
11.4.3 Kapazitätsmessung
1. Bestimmen Sie die Kapazitätswerte Cx und die Widerstandswerte Rx von den unbekannten
Impedanzboxen Zx . Nutzen Sie dazu das Abgleichverfahren. Die Widerstandsmessungen
werden mit dem Messgerät Fluke 8846A 6 21 Digit (Toleranz von 0.01%) durchgeführt.
Diese Information ist für die Unsicherheitsbetrachtung im nächsten Abschnitt wichtig.
2. Wie groß ist jeweils der Verlustfaktor des technischen Kondensators für die gewählte
Messfrequenz von 1 kHz?
11.4.4 Fehlerbetrachtung
Berechnen Sie mit den ermittelten Werten die Messunsicherheiten von Rx und Cx nach den
Gesetzen der Gauss’schen Unsicherheitsfortpflanzung. Welches Fazit kann aus dem Ergebnis
gezogen werden?
88
WS 2014/15
11.5 Anhang
11.5 Anhang
Datenblätter und technische Daten
Trenntrafo
Sekundär-Spannung:
Primär-Spannung:
Leistung:
2 x 115 V
230 V
30 VA
Widerstandsmessgerät
Fluke 8846 A: Für die Widerstandsmessung kann ein Fehler von 0.01% angenommen werden.
Industriemessbrücke
Die Genauigkeit der auf den Gehäusen angegebenen Werte für Kondensatoren und Widerstände,
die mit einer Industriemessbrücke bestimmt wurden, beträgt 0,02%.
WS 2014/15
89
Resistance
Specifications are for 4-wire resistance function, 2 x 4-wire resistance, or 2-wire resistance with zero. If zero is not used, add 0.2 for 2wire resistance plus lead resistance, and add 20 m for 2 x 4-wire resistance function.
Measurement Method ..................................................Current source referenced to LO input.
Max. Lead Resistance (4-wire ohms) ......................10 % of range per lead for 100 , 1 k ranges. 1 k per lead on all other ranges.
Input Protection ............................................................1000 V on all ranges.
Input Characteristics
Range
10
100
1k
10 k
100 k
1M
10 M
100 M
1.0 G [1]
[1]
[1]
Full Scale
(6½ Digits)
10.00000
100.0000
1.000000 k
10.00000 k
100.0000 k
1.000000 M
10.00000 M
100.0000 M
1.000000 G
8846A Only
4½ Digits
1m
10 m
100 m
1
10
100
1k
10 k
100 k
Resolution
5½ Digits
100 !
1m
10 m
100 m
1
10
100
1k
10 k
6½ Digits
10 !
100 !
1m
10 m
100 m
1
10
100
1k
Source Current
5 mA
1 mA
1 mA
100 !A
10 !A
10 !A
1 !A
1 !A || 10 M
1 !A || 10 M
8846A Accuracy
Accuracy is given as " (% measurement + % of range)
24 Hour
(23 " 1 #C)
Range
10
100
1k
10 k
100 k
1M
10 M
100 M
1G
0.003 + 0.01
0.003 + 0.003
0.002 + 0.0005
0.002 + 0.0005
0.002 + 0.0005
0.002 + 0.001
0.015 + 0.001
0.3 + 0.01
1.0 + 0.01
8845A Accuracy
90 Days
(23 " 5 #C)
0.008 + 0.03
0.008 + 0.004
0.008 + 0.001
0.008 + 0.001
0.008 + 0.001
0.008 + 0.001
0.02 + 0.001
0.8 + 0.01
1.5 + 0.01
1 Year
(23 " 5 #C)
0.01+ 0.03
0.01 + 0.004
0.01 + 0.001
0.01 + 0.001
0.01 + 0.001
0.01 + 0.001
0.04 + 0.001
0.8 + 0.01
2.0 + 0.01
Accuracy is given as " (% measurement + % of range)
24 Hour
(23 " 1 #C)
Range
100
1k
10 k
100 k
1M
10 M
100 M
0.003 + 0.003
0.002 + 0.0005
0.002 + 0.0005
0.002 + 0.0005
0.002 + 0.001
0.015 + 0.001
0.3 + 0.01
Additional Ohms Errors
Digits
6½
6½
5½
5½
4½
90 Days
(23 " 5 #C)
0.008 + 0.004
0.008 + 0.001
0.008 + 0.001
0.008 + 0.001
0.008 + 0.001
0.02 + 0.001
0.8 + 0.01
NPLC
100
10
1
0.2
0.02
1 Year
(23 " 5 #C)
0.01 + 0.004
0.01 + 0.001
0.01 + 0.001
0.01 + 0.001
0.01 + 0.001
0.04 + 0.001
0.8 + 0.01
Temperature
Coefficient/ #C
Outside 18 to 28 #C
0.0006 + 0.0005
0.0006 + 0.0005
0.0006 + 0.0001
0.0006 + 0.0001
0.0006 + 0.0001
0.001 + 0.0002
0.003 + 0.0004
0.15 + 0.0002
0.6 + 0.0002
Temperature
Coefficient/ #C
Outside 18 to 28 #C
0.0006 + 0.0005
0.0006 + 0.0001
0.0006 + 0.0001
0.0006 + 0.0001
0.0010 + 0.0002
0.0030 + 0.0004
0.1500 + 0.0002
Additional Noise Error
0 % of range
0 % of range
0.001 % of range
0.001 % of range " 20 m
0.01 % of range " 20 m
8845A and 8846A
Fluke Corporation
5
11.5 Anhang
zu messende Kondensatoren
WS 2014/15
91
WIMA MKS 2
Metallisierte Polyester-Kondensatoren
im Rastermaß 5 mm
Metallized polyester capacitors
in PCM 5 mm
˜ Für alle Standard-Anwendungen im RM 5 mm.
˜ Speicherkondensator ohne Lebensdauerbegrenzung selbst bei hohen Temperaturen. ˜ Kapazitätsspektrum bis 10 mF und Spannungsreihen bis 400 V-.
˜ Günstiges C/V Produkt, hohe Volumenkapazität.
˜ For all standard PCM 5 mm applications. ˜ Reservoir capacitor with unlimited life expectancy
even at high temperatures. ˜ Capacitances up to
10 mF and voltage ranges up to 400 VDC. ˜ Very
advantageous volume/capacitance ratio.
Technische Angaben
Technical Data
Dielektrikum: Polyäthylenterephthalat-Folie.
Beläge: Aluminium, aufmetallisiert.
Umhüllung: Flammhemmendes Kunststoffgehäuse, UL 94 V–0,
Epoxidharzverguß. Farbe: Rot. Aufdruck: Weiß/Silber oder Schwarz.
Temperaturbereich: –55 ) C bis +100 ) C.
Prüfungen: Nach IEC 60384-2 bzw. EN 130 400.
Prüfklasse: 55/100/21 nach IEC.
Isolationswerte bei +20° C:
Dielectric: Polyethylene-terephthalate film.
Capacitor electrodes: Vacuum-deposited aluminium.
Encapsulation: Flame retardent plastic case, UL 94 V–0,
with epoxy resin seal. Colour: Red. Marking: White/Silver or Black.
Temperature range: –55) C to +100) C.
Test specification: In accord. with IEC 60384-2 and EN 130400.
Test category: 55/100/21 in accordance with IEC.
Insulation resistance at +20° C:
UN
U meß
C 5 0,33 mF
10 V
-
16 V-
0,33 mF < C 5 10 mF
61000 s (MV mF)
„
Mittelwert: 3000 s
6 5 10 3 MV
61000 s (MV mF)
„
„
50 V-
10 V Mittelwert: 3 10 4 MV
63 V-
50 V
MV
61
Mittelwert: 5 10 4 MV
61250 s (MV mF)
6100 V- 100 V
6 1,5 10 4 MV
Mittelwert: 1 10 5 MV
63000 s (MV mF)
Mittelwert: 3000 s
„
„
10 4
„
Mittelwert: 3000 s
„
„
„
Mittelwert: 6000 s
„
Nach IEC 60384-2 und EN 130 400.
Meßzeit: 1 min.
Kapazitätstoleranzen: ± 20 %, ± 10 %, ± 5 %.
Impulsbelastung:
C-Wert
mF
0,01
0,033
0,1
0,68
1,5
6,8
16 V-
35/350
20/200
15/150
12/120
7,5/75
-
35/350 50/500 80/800
25/250 50/500 80/800
20/200 50/500 80/800
15/150
10/100
-
bei vollem Spannungshub.
Verlustfaktoren bei +20) C: tan d
5 8 10 -3
5 15 10 -3
5 30 10 -3
„
„
„
C 5 0.33 mF
0.33 mF < C 5 1.0 mF
-
61000 sec (MV x mF)
6 5 x 10 3 MV
61000 sec (MV x mF)
16 VDC 10 V
Mean value: 3000 sec
50 VDC 10 V Mean value: 3 x104 MV Mean value: 3000 sec
63 VDC 50 V
6 1 x 10 4 MV
61250 sec (MV x mF)
Mean value: 5 x104 MV Mean value: 3000 sec
6100 VDC 100 V
6 1.5 x 10 4 MV
63000 sec (MV x mF)
Mean value: 1 x105 MV Mean value: 6000 sec
Capacitance
mF
0.01
0.033
0.1
0.68
1.5
6.8
. . . 0.022
. . . 0.068
. . . 0.47
. . . 1.0
. . . 3.3
4.7
. . . 10
Pulse rise time V/msec
max. operation/test
16 VDC 50 VDC 63 VDC 100 VDC 250 VDC 400 VDC
7.5/75
5/50
4/40
3/30
25/250
15/150
10/100
8/80
8/80
5/50
3/30
35/350
20/200
15/150
12/120
7.5/75
-
35/350 50/500 80/800
25/250 50/500 80/800
20/200 50/500 80/800
15/150
10/100
-
for pulses equal to the rated voltage.
Dissipation factors at +20 ) C: tan d
Gemessen bei C 5 0,1 mF 0,1 mF < C 5 1,0 mF
1 kHz
10 kHz
100 kHz
Utest
In accordance with IEC 60384-2 and EN 130 400.
Measuring time: 1 min.
Capacitance tolerances: ± 20 %, ± 10 %, ± 5 %.
Maximum pulse rise time:
Flankensteilheit V/ms
max. Betrieb/Prüfung
50 V- 63 V- 100 V- 250 V- 400 V-
. . . 0,022
- 25/250
. . . 0,068
- 15/150
. . . 0,47
- 10/100
. . . 1,0
7,5/75 8/80
. . . 3,3
5/50 8/80
4,7
4/40 5/50
. . . 10
3/30 3/30
Ur
C > 1,0 mF
at f
C 5 0.1 mF
0.1 mF < C 5 1.0 mF
C > 1.0 mF
5 8 10 -3
5 15 10 -3
5 10 10 -3
5 10 x 10 -3
-
5 8 x 10 -3
5 15 x 10 -3
5 30 x 10 -3
5 8 x 10 -3
5 15 x 10 -3
-
1 kHz
10 kHz
100 kHz
„
„
„
-
-
Test voltage: 1.6 U r , 2 sec.
Vibration: 6 hours at 10 . . . 2000 Hz and 0.75 mm displacement
amplitude or 10 g in accordance with IEC 60068-2-6.
Low air density: 1 kPa = 10 mbar in accord. with IEC 60068-2-13.
Bump test: 4000 bumps at 390 m/sec2 in accordance
with IEC 60068-2-29.
Voltage derating: A voltage derating factor of 1.25% per K must be
applied from +85°C for DC voltages and from +75°C for AC voltages.
Graphs see page 6.
01-02
Prüfspannung: 1,6 UN , 2 s.
Schwingen: 6 h bei 10 . . . 2000 Hz und 0,75 mm Auslenkung
bzw. 10 g nach IEC 60068-2-6.
Unterdruck: 1 kPa = 10 mbar nach IEC 60068-2-13.
Stoßtest: 4000 Stöße mit 390 m/s2 nach IEC 60068-2-29.
Spannungsderating: Die zulässige Spannung vermindert sich gegenüber der Nennspannung bei Gleichspannungsbetrieb ab +85)C
bei Wechselspannungsbetrieb ab +75) C um 1,25 % je 1 K.
Kurven siehe Seite 6
-
36
Literaturverzeichnis
[1] Gühmann, C.
Skript - Messen elektrischer Größen
MDT 2007
[2] Gühmann, C.
Vorlesungsfolien- Messen elektrischer Größen Elektronische Messtechnik
MDT 2010
[3] VDE/VDI 2620 Blatt 1
Fehlerrechnung
WS 2014/15
93
12 Dehnungsmessstreifenbrücke
Lernziele
• Biegebalken und Hookesches Gesetz
• Einsatz eines Dehnungsmessstreifens (DMS)
• Typen von DMS-Brückenschaltungen und deren Eigenschaften
• Mehrleitertechniken
12.1 Einleitung
In diesem Versuch wird die Kraft, die auf einen Biegebalken wirkt mittels Dehnungsmessstreifen
(DMS) untersucht. Die Dehnungsmessstreifen sind auf dem Biegebalken aufgeklebt und verändern ihren Widerstand in Abhängigkeit von der Dehnung. Da sie Teil einer Wheatstone-Brückenschaltung
sind, kann die Dehnung über eine Differenzspannungsmessung ermittelt werden. Die zu messenden
Dehnungen haben die Größenordnung 10−3 /m und bewirken nur geringe Widerstandsänderungen. Da die daraus resultierende Differenzspannung Ud sehr klein ist, wird ein Spannungsverstärker eingesetzt. Die Anordnung ist in Bild 12.1 dargestellt.
12.2 Theorie zum Versuch
12.2.1 Biegebalken
Die Kraft, die auf einen Biegebalken der Breite b und der Höhe h wirkt, kann über die Gleichung
F=
1 Ebh2
ε
6 l
(12.1)
Bild 12.1: Prinzipieller Aufbau der Gewichtskraftmessung mit einem Dehnungsmesssreifen
(DMS). Durch die ausgeübte Kraft verändert der Balken seine Länge. Durch die Längenänderung verändert sich der Widerstand des DMS. Der DMS ist dabei Teil einer
Messbrücke.
94
WS 2014/15
12.2 Theorie zum Versuch
berechnet werden. Dabei ist E das Elastitzitätsmodul des Balkens und ε die gemessene Dehnung.
l ist der Abstand zwischen der Gewichtsaufhängung und dem Dehnungsmessstreifen. Das Elastizitätsmodul ist eine Materialkonstante die angibt, wie nachgiebig ein Stoff ist. Für einen Draht
der Länge l und der Querschnittsfläche q, der durch eine Kraft F um die Länge ∆l gedehnt wird,
gilt das Hookesche Gesetz
∆l
F
=
.
(12.2)
l
Eq
Eine höhere Konstante bedeutet, dass der Stoff weniger nachgibt:
Material
Stahl
Aluminium
Kupfer
Messing
Blei
E-Modul in kN/(mm2 )
190 bis 220
70
120
78 bis 123
5
Das E-Modul hängt nicht mit der Zugfestigkeit und der Streckgrenze eines Stoffes zusammen.
Die Zugfestigkeit ist die im Zugversuch ermittelte Spannung im Augenblick des Stoffbruches.
Die Streckgrenze gibt die maximale Dehnung eines Stoffes an, bevor eine plastische Verformung erfolgt. Beim Biegebalken Versuch darf die Streckgrenze des Balkens nicht überschritten
werden. Beim Überschreiten dieser Grenze kehrt der Balken nicht wieder in seine ursprüngliche
Form zurück. Das E-Modul ist bei allen Stählen ungefähr gleich.
12.2.2 DMS-Brückenschaltungen
dl/L=?
Bild 12.2: Dehnungsmessstreifen mit seinen typischen Messgitterleitungen. Die Gitterleitungen verändern ihren Widerstand bei Dehnung oder Stauchung. Aus
der gemessenen Widerstandsänderung läßt sich die Dehnung ε = ∆ll ermitteln.
Ein Dehnungsmessstreifen (DMS) ist ein Sensor zur Messung der Dehnung eines Messobjektes,
der aus einem sehr dünnen Draht besteht. Über die ermittelte Dehnung lassen sich die auf das
Objekt wirkenden Kräfte ermitteln. Im ungedehnten Zustand hat ein DMS einen Nennwiderstand, der bei 120, 350, 700 oder 1000 Ohm liegen kann. Die Dehnung des Messfühlers bewirkt
eine Längenänderung der Messgitterleitungen, die in Abbildung 12.2 dargestellt sind.
Für einen Draht der Länge l läßt sich der Widerstand bei gegebenen Querschnitt q und dem
WS 2014/15
95
12 Dehnungsmessstreifenbrücke
spezifischen Widerstand ρ wie folgt berechnen:
R=
ρ ·l
q
(12.3)
Aus dieser Gleichung läßt sich für den Dehnungsmessstreifen mit dem Empfindlichkeitsfaktor
k, der bei einer Dehnung seinen Widerstand um den Wert ∆R ändert, der Zusammenhang für die
Dehnung ε
∆l 1 ∆R
=
ε=
(12.4)
l0
k R
herleiten. Die Dehnung ε ist proportional zur relativen Widerstandsänderung, wenn der DMS in
seinem elastischem Bereich betrieben wird. Zu beachten ist, dass der DMS mit Strömen kleiner
als 20 mA zu betreiben ist, da sonst durch Eigenerwärmung das Messergebnis verfälscht werden
kann.
Bild 12.3: Typische Brückenschaltung. Im Labor wird das Ausschlagverfahren eingesetzt, bei dem die Verstimmung der Brücke über die Differenzspannung UD
gemessen wird.
Brückenschaltungen werden verwendet, um die Impedanz unbekannter Bauelemente zu ermitteln. Dabei werden vier Widerstände, die zwei Spannungsteiler bilden, so wie in Abbildung 12.3
dargestellt verschaltet. Bei dem Abgleichverfahren wird einer der Widerstände als einstellbarer
Widerstand (Widerstandsdekade) ausgeführt. Mit diesem Widerstand wird die Messbrücke so
abgeglichen, dass die Differenzspannung Ud gleich Null ist. Dann gilt die Bedingung
R1 R3
= .
R2 R4
(12.5)
Ist einer der Widerstände unbekannt, also z.B. R2 = Rx , so kann er über diese Bedingung ermittelt werden, wenn die Widerstände R1 , R3 und R4 gegeben sind.
Soll die Messbrücke dazu verwendet werden, den Widerstand eines Dehnungsmessstreifens
zu ermitteln, werden je nach Anforderung die Widerstände mit DMS-Widerständen ersetzt.
Die restlichen Widerstände der Brücke werden so gewählt, dass im Ausgangszustand R1 =
R2 = R3 = R4 gilt. Wird die Brücke nicht bei jeder Dehnung neu abgeglichen, so wird der
96
WS 2014/15
12.2 Theorie zum Versuch
DMS-Widerstand mit dem Ausschlagverfahren ermittelt. Dabei kann der unbekannte Widerstand durch Messung der Differenzspannung UD ermittelt werden:
R2
R4
UD = UB
−
(12.6)
R1 + R2 R3 + R4
Die messtechnischen Eigenschaften der Brücke bezüglich Empfindlichkeit und Temperaturkompensation verbessern sich, je mehr DMS-Widerstände eingesetzt werden. Die Empfindlichkeit
bestimmt die Änderung der Spannung ∆UD , die aus einer DMS-Widerstandsänderung ∆R resultiert. In diesem Versuch werden die DMS immer in axialer Richtung angebracht.
Viertelbrücke Bei der Viertelbrücke wird einer der Brückenwiderstände durch einen DMS
ersetzt. Dabei wird für jedes Gewicht die Differenzspannung UD gemessen. Die Empfindlichkeit
der Brücke ist gegeben durch
∆UD
U
=
.
(12.7)
∆R
4R
Vom DMS führt eine längere, zwei-adrige Leitung zur Schaltung der restlichen Brückenwiderstände. Verändert sich der Widerstand dieser Leitung durch Temperatur oder durch mechanische
Einflüsse, so wird diese Änderung mitgemessen. Durch die Dreileiter-Technik wie sie in Abbil-
Bild 12.4: Dreileiter-Technik bei der Viertel-Messbrücke. Die kleinen Widerstände
stellen die Widerstände der Leitungen zum DMS dar. Eine Leitung des
DMS wird dabei doppeladrig ausgeführt.
dung 12.4 gezeigt wird, kann dieser Messfehler vermieden werden. Dabei wird die Leitung vom
DMS zum Anschlußpunkt UD doppeladrig ausgeführt, wobei ein Kabel davon an den Messverstärker angeschlossen wird, und das andere an den verbleibenden Widerstand im Brückenzweig.
Der Leitungswiderstand verteilt sich so jeweils auf die obere und die untere Brückenhälfte und
kompensiert sich dadurch in dem Brückenzweig, da die Leitungsänderungen der beiden Drähte
gleich groß sind. Bei der Messung von UD tritt allerdings ein systematischer Messfehler auf, da
zusätzlich der Spannungsabfall über dem Kabel angezeigt wird. Dieser Fehler kann durch den
Einsatz der Vierleiter-Technik vermieden werden. Bei dieser Technik wird ein vier-adriges Kabel zum Sensor geführt, wobei zwei Adern mit dem DMS, die anderen beiden am Ende einfach
gebrückt werden. Die Verdrahtung erfolgt wie in Abbildung 12.5 dargestellt. Die Spannung
UD wird nun direkt am gemeinsamen Knoten zwischen dem oberen und unteren Messzweig
WS 2014/15
97
12 Dehnungsmessstreifenbrücke
Bild 12.5: Vierleiter-Technik bei der Viertel-Messbrücke. Ein vier- adriges Kabel wird
zum Sensor geführt, wobei zwei Drähte am Kabelende kurzgeschlossen
werden. Der systematische Messfehler der Dreileiter-Technik wird dadurch
vermieden.
abgegriffen.
Halbbrücke Bei der Halbrücke werden zwei DMS jeweils oberhalb und unterhalb des Balkens
im gleichen Abstand l vom der Gewichtsaufhängung angebracht. In der Messbrücke befinden
sich die Widerstände im gleichen Zweig. Wird der Balken belastet, so wird der obere Streifen
gedehnt und der untere gestaucht. Eine Temperaturkompensation wird dadurch erreicht, dass
sich beide DMS äquivalent ausdehnen und sich somit ihr Widerstand um den gleichen Betrag
ändert. Dadurch bleiben ihr Widerstandsverhältnis und der Gesamtwiderstand des Brückenzweiges konstant. Die Empfindlichkeit der Brücke verbessert sich um den Faktor zwei:
∆UD
U
=
∆R
2R
(12.8)
Der zweite DMS kann auch quer zum ersten DMS befestigt werden, wodurch sein Widerstand
bei Dehnung konstant bleibt. Der Effekt der Temperaturkompensation bleibt dann erhalten, jedoch ist die Empfindlichkeit nur so groß wie bei der Viertelmeßbrücke.
Vollbrücke Bei der Vollbrücke werden vier DMS eingestzt, wobei jeweils zwei gegenüberliegende DMS derselben Dehnung ausgesetzt sind. Die Spannung UD verhält sich linear, wenn
sich die Dehnung der anderen DMS nur durch das Vorzeichen unterscheidet.
Eine Vollbrücke wird manchmal als Diagonalbrücke betrieben. Eine Diagonalbrücke hat zwei
DMS, die in der Brücke diagonal zueinander liegen und die Dehnung vorzeichengleich aufnehmen.
Wird die Vollbrücke als Diagonalbrücke betrieben, nehmen nur zwei Messstreifen die Dehnung
auf, die anderen beiden sind quer zur Dehnungsrichtung aufgeklebt und dienen nur der Temperaturkompensation.
Die Empfindlichkeit der Vollbrücke ist gegeben durch
∆UD U
= .
∆R
R
98
(12.9)
WS 2014/15
12.3 Theoretische Aufgaben
Um die Messbrücke zu betreiben, reichen vier Leitungen für UB und UD aus. Um die tatsächliche Versorgungsspannung an der Messbrücke zu messen, kann diese in der SechsleiterTechnik ausgeführt werden. Dabei werden zwei zusätzliche Leitungen von den Spannungsversorgungspunkten der Brücke herausgeführt. Diese beiden Leitungen dienen dazu, die wirkliche
Spannung an der Brücke zu messen. Dadurch werden die Spannungsabfälle der Widerstände
der Versorgungsleitungen berücksichtigt.
12.3 Theoretische Aufgaben
1. Kann das Abbgleichverfahren beim Dehnungsmessstreifenversuch eingesetzt werden?
2. Ein Stahlblech in einem Automobil biegt bei Belastung durch. Welche der folgenden
Gegenmaßnahmen sind sinnvoll:
a) hochwertigeren Stahl einsetzen
b) Blechstärke erhöhen
c) härteren Werkstoff benutzen
3. Welchen Einfluß auf die Meßbrücke hat die Höhe der Spannung UB ?
4. Erläutern Sie die den Aufbau und die Wirkungsweise der Drei- und Vierleiter-Technik
bei der Viertelbrücke! Wann macht der Einsatz dieser Techniken Sinn?
5. Erläutern Sie den Aufbau der Sechsleiter-Technik bei der Vollbrücke! Wann wird diese
eingesetzt?
6. Leiten Sie die Empfindlichkeit für die Viertelbrücke her!
7. Leiten Sie die Empfindlichkeit für die Halbbrücke her!
8. Auf den Biegebalken aus Aluminium (l=10 cm, b=5 cm, h=0.5 mm) mit einem DMS
(k=2) wird ein unbekanntes Gewicht aufgelegt. Bei einer Betriebsspannung von 5 Volt
wird eine Differenzspannung von 40 mV gemessen. Der Verstärker besitzt eine Verstärkung von 10. Wie groß ist das Gewicht?
Tipp:
Nehmen sie als Ausgangsformel 12.7 und ersetzten sie ∆R
der Formel 12.4. Für
R mit
h Hilfe
i
1
kann die gewichtsabhängige Funktion f ∆l (m) = 0.075 kg
· m [kg] genommen werl
den. Stellen sie nun die Gleichung zur Berechnung der gesuchten Masse um und achten
sie beim rechnen auf die Einheiten!
∆l
l
9. Verhält sich die Dehnung ε linear zu der Spannung Ud ? Geben Sie jeweils eine Formel
für die Viertel-, Halb-, und Vollmessbrücke an, um den Zusammenhang darzustellen.
12.4 Praktische Aufgaben
1. Nehmen Sie mit einer Viertelmessbrücke eine Kennlinie auf, die die Spannung UD für die
gegebenen Gewichte angibt. Benutzen Sie dabei den Messverstärker, um die Spannung
zu messen. Die Spannung UD sollte über einen einstellbaren Messbrückenwiderstand und
falls notwendig über einen Nullabgleich am Messverstärker auf 0 Volt gezogen werden,
damit auf dem Spannungsmessgerät die Differenzspannung abgelesen werden kann. Die
Brücke wird vom Messverstärker mit 5 Volt versorgt. Vergleichen sie den berechneten
WS 2014/15
99
12 Dehnungsmessstreifenbrücke
Wert der Masse aus dem Theorieteil für Ud = 40 mV mit dem tatsächlichen Messwert.
Setzen sie dafür die berechnete Masse aus dem Theorieteil in eine erzeugte Regressionsgeraden aus den Messwerten ein und vergleichen sie Ud .
2. Nehmen Sie die Kennlinie einer Vollmessbrücke auf. Besprechen Sie Ihre Vorgehensweise
mit Ihrem Tutor.
12.5 Anhang
Technische Daten der Messstreifen
Technische Daten Messverstärker
100
WS 2014/15
12.5 Anhang
Technical
Data / Technische
Daten
Gage
Specifications
/ DMS-Ausführungen
Table 1
Specifications
Resistance tolerance, open face grid.
(If not specified otherwise in the table section)
Resistance tolerance, for all other than open face grid.
(If not specified otherwise in the table section)
Gage factor, nominal. Exact value is stated on
each package
Tolerance of gage factor
Gage factor slope
Transverse sensitivity
Temperature ranges: strain gage w/o options
Options C, EC, L, EL
Fatigue life (bidirectional)
Safe bending radius
Available options
Adhesive to use
Option C (Tinned tabs)
Option E (Encapsulated grid)
Option EC (Encapsulated grid & tinned tabs)
Option EL
(Encapsulated grid with leads)
FAB-Series
FAE-Series
FSE-Series
FSM-Series
RNIE-Series
na
± 0,15 %
± 0,15 %
± 0,15 %
±1%
± 0,2 %
± 0,2 %
± 0,2 %
± 0,2 %
± 1,5 %
2,05
2,05
2,1
2,1
na
± 0,5 %
± 0,5 %
± 0,5 %
± 0,5 %
na
Graph included in each package
na
Stated on each gage package, if appropriate
na
-75 to +230°C
-75 to +205°C
-265 to +230°C* -265 to +400°C* -75 to +205°C
n/a
-75 to +205°C
-265 to +205°C -265 to +205°C
-72 to +205°C
>107 cycles
>107 cycles
>107 cycles
>107 cycles
at ± 1150 µm/m at ±1650 µm/m
at ± 2250 µm/m at ± 2250 µm/m na
3 mm
1,6 mm
1,6 mm
3 mm
1,6 mm
none
E, EC, EL
C, E, EC, EL
C, EC, EL
E, EC, EL
All appropriate strain gage adhesives. For precision transducer QA 600 or QA 550
is recommended. PLD-700 is recommended for FSM upto 400°C.
see note 1
Tabs are pre-tinned with a thin layer of 218°C (425°F) solder.
see note 1
A 0,025 mm thick layer of polyimide film
covers all the gage, except a portion of the tab
necessary for lead attachment, is not covered
see note 1
A combination of option E and option C.
see note 1
Nickel-clad copper ribbon >25 mm long and 0,06 mm
thick is soldered with 218°C solder.
Usable to 205°C. The gage incl. the solder joints are
covered with a 0,025 mm thick polyimide layer.
Note 1: FAB Series is encapsulated with welded leads as standard.
* Temperature range depends also on the options selected.
Tabelle 1
Spezifikationen
Widerstandstoleranz, offenes Messgitter
(wenn im Tabellenteil nicht anders angegeben)
Widerstandstoleranz, alle Optionen
(wenn im Tabellenteil nicht anders angegeben)
k-Faktor, nominal. Genauer Wert ist auf jeder
Packung angegeben
Toleranz des k-Faktors
Temperaturkoeffizient des k-Faktors
Querempfindlichkeit
Temperaturbereiche: DMS ohne Optionen
Optionen C, EC, L, EL
Lebensdauer (bidirektional)
Biegeradius (min)
Erhältliche Optionen
Verwendbare Klebstoffe
Option C (Verzinnte Anschlüsse)
Option E (Abgedecktes Messgitter)
Option EC
Option EL
(Abgedecktes Messgitter und Anschlussdrähte)
FAB-Serie
FAE-Serie
FSE-Serie
FSM Serie
RNIE-Serie
entfällt
± 0,15 %
± 0,15 %
± 0,15 %
±1%
± 0,2 %
± 0,2 %
± 0,2 %
± 0,2 %
± 1,5 %
2,05
2,05
2,1
2,1
entfällt
± 0,5 %
± 0,5 %
± 0,5 %
± 0,5 %
entfällt
Ein Kennblatt ist jeder Packung beigelegt
entfällt
Auf jeder Packung angegeben (falls anwendbar)
enffällt
-75 bis +230°C
-75 bis +205°C
-265 bis +230°C* -265 bis +400°C* -75 bis +205°C
n/a
-75 bis +205°C
-265 bis +205°C -265 bis +205°C -75 bis +205°C
>107 Zyklen
>107 Zyklen
>107 Zyklen
>107 Zyklen
bei ± 1150 µm/m bei ± 1650 µm/m bei ± 2250 µm/m bei ± 2250 µm/m entfällt
3 mm
1,6 mm
1,6 mm
3 mm
1,6 mm
keine
E, EC, EL
C, E, EC, EL
C, EC, EL
E, EC, EL
Die meisten DMS-Klebstoffe sind geeignet. Für Präzisions-Messwertaufnehmer wird
QA-600 oder QA-550 empfohlen. Für FSM bis 400°C wird PLD-700 empfohlen.
siehe Anm.1
Anschlüsse sind mit einer dünnen Schicht Lot (218° C) überzogen
siehe Anm.1
Ein 0,025 mm dicker Polyimidfilm deckt den ganzen
DMS ab. Nur der zum Anlöten der Anschlussdrähte
nötige Bereich bleibt frei.
siehe Anm.1
Eine Kombination aus Option E und Option C.
siehe Anm.1
Nickelplattierte Kupferbänder >25 mm lang und 0,06 mm dick,
mit 218°C Lot angelötet an den DMS. Betriebstemperatur bis 205°C.
Der ganze DMS inkl. der Lötstellen ist mit 0,025 mm Polyimidfilm
abgedeckt.
Anmerkung 1: Die FAB-Serie ist immer abgedeckt mit angeschweissten Anschlussdrähten
* Temperaturbereich hängt auch von der verwendeten Option ab.
4
Bild 12.6: Technische Daten der verschiedenen Serien der Dehnungsmessstreifen. Im
Labor wird die FAE-Serie eingesetzt.
WS 2014/15
101
12 Dehnungsmessstreifenbrücke
Gage Specifications / DMS-Ausführungen
Gage
Pattern
Actual
Matrix Size
Grid
Length
Ausführung
OriginalGrösse
9,2 x 3,6
Grid
Width
Overall
Width
Resistance
Ohm
Gage
Designation
End-Tab
Ratio
Messgitter- Messgitter- GesamtLänge
Breite
Länge*
GesamtBreite
Widerstand
Ohm
Modellbezeichnung
Kriechanpassung
1,52
2,03
1,81
Overall
Length*
7,49
350 ±0,2%
FAET
-A6347Q-35-SXE
AET-A6347Q-35-SXE
9:1
Mainly used on small column transducers.
Wird oft auf kleinen Zug- und Druckstäben eingesetzt.
18
9,4 x 8,4
5,08
grid 2
l =1,27
w =4,37
grid 1
19
3,8 x 5,1
20
4,8 x 5,3
grid 1
2,34 grid 1 8,38
6,81
1000 ±0,2% FSE3-A6281M-100-SXEC 8:1
FAE3-A6
360
M35
-SXE
350 ±0,2%
E3-A6360
360MM-35
35-SXE
8:1
Used on column type load cells.
Wird oft auf Zug- und Druckstäben eingesetzt.
1,27
1,63
2,92
4,28
5000 ±0,6%
FSM2-A6306S-500-SXEC 10:1
Dual high resistance gage. Widely used in battery
operated transducers and in 2-wire transducers.
Hochohmiger Doppel-DMS. Verwendbar z.B. für
batteriebetriebene Sensoren und 2-Leiter Sensoren.
1,52
1,47
3,99
3,91
1000 ±0,2% FAE2-A6314P-100-SXE
8,5:1
Small dual-element gage with special tab configuration.
Kleiner Doppel-DMS mit spezieller Anschlussanordnung.
21
5,1 x 6,3
1,57
1,37
3,84
4,98
350 ±0,2%
FAE2-A6278P-35-SXE
FAE2-A6278R-35-SXE
FAE2-A6278S-35-SXE
8,5:1
9,5:1
10:1
FAE2-A6248P-35-SXE
8,5:1
Dual-element gage with fairly large tabs.
Kleiner Doppel-DMS mit relativ grossen Anschlussflächen.
22
4,8 x 5,3
1,57
1,35
3,70
3,66
350 ±0,2%
Small dual-element gage. Widely used for all kinds of
bending beams.
Vielgebrauchter kleiner Doppel-DMS. Für alle Arten von
Biegebalken.
23
5,6 x 7,4
24
7,9 x 7,9
1000 ±0,2% FAE2-A6251E-100-SXE
FAE2-A6251F-100-SXE
FAE2-A6251J-100-SXE
FAE2-A6251P-100-SXE
1000 Ohm dual-element gage. Widely used for all kinds
of bending beams.
Vielgebrauchter kleiner Doppel-DMS mit 1000 Ohm.
Für alle Arten von Biegebalken.
1,52
2,39
3,84
5,84
3,18
1,57
5,23
4,06
350 ±0,2%
4:1
4,5:1
6:1
8,5:1
FAE2-12-35-SXE-4
FAE2-12-35-SXE-5
FAE2-12-35-SXE-6
7,5:1
8:1
9:1
FAE2-A6174J-35-SXE
FAE2-A6231J-100-SXE
6:1
6:1
Dual-element gage for bending beams.
Doppel-DMS für Biegebalken.
25
6,6 x 7,6
3,18
2,54
5,13
6,50
350 ±0,2%
1000 ±0,2%
Dual-element gage, widely used for bending beams.
Meistgebrauchter Doppel-DMS für Biegebalken.
26
10
Bild 12.7: Verschiedene Ausführungen von Doppeldehnungsmessstreifen. Im Labor
wird der DMS FAE2 A6174J-35 S13 E eingesetzt.
102
WS 2014/15
12.5 Anhang
Gage
Coding
System / /DMS-Bestellkodierung
Gage
Specifications
DMS-Ausführungen
Identification Code
Creep Code
FAED - A6167 N - 35 - XX E
FAED - 06B - 35 - XX E - N
Sensing Element
F
= Foil-gage
R
= Foil-resistor
Creep Code
(see description on page 5)
Option-Suffix
C
= Tinned tabs
E
= Encapsulated grid
EC
= Encapsulated with tinned tabs
EL
= Encapsulated with leads
W.O. = Open face grid
Type of Alloy
A
= Constantan (400)
S
= Stabiloy
BA
= Balco
Ni
= Nickel
Carrier Materials
B
= Phenolic-glass
E
= Polyimide
M
= Polyimide-glass
Grid Configuration Code
D
= Dual diagonal (Torque/Shear)
S
= Diaphragm
T
= Transverse (2 elements)
GR, GL = Single grid shear gage
Number = Number of elements
No letter or number = Single element
Temperature Compensation
(µm/m/°F)
S 6 = Mild steel
= 10.8 . 10-6/°C
S 13 = Aluminum
= 23.4 . 10-6/°C
Others on request
or Young's modulus compensation
M1 to M15 (only FSE- and FSM-series)
Resistance of Element
x 10 Ohms
Tab or Grid Arrangements
Sensing Element Length
(x 0,01 = active gage length in inch)
(x 0,254 = active gage length in mm)
Identifizierungscode
Kriechanpassung
FAED - A6167 N - 35 - XX E
FAED - 06B - 35 - XX E - N
Aktives Element
F
= Folien-DMS
R
= Folien-Widerstand
Kriechanpassung
(siehe Beschreibung auf Seite 5)
Option
C
E
EC
EL
Ohne
Gitterlegierung
A
= Konstantan (400)
S
= Ni-Cr (Stabiloy/Karma)
BA
= Balco
Ni
= Nickel
Trägerwerkstoff
B
= Phenol + Glasfaser
E
= Polyimid
M
= Polyimid + Glasfaser
Gittergestaltung
D
= Dual Diagonal Torsion/Scherung
S
= Membrane
T
= Transversal (2 Elemente)
GR, GL = Einzel-DMS für Scherung
Zahl
= Zahl der Messgitter
Kein Buchstabe oder Zahl = Einzelmessgitter
= Verzinnte Anschlüsse
= Abgedecktes Messgitter
= Abged. u. verzinnte Anschlüsse
= Abgedeckt und Anschlussdrähte
= Offenes Messgitter
Temperatur-Kompensation
(µm/m/°F)
S 6 = Stahl
= 10.8 . 10-6/°C
S 13 = Aluminium
= 23.4 . 10-6/°C
andere auf Anfrage
oder E-Modul Kompensation
M1 bis M15 (nur FSE- und FSM-Serie)
Widerstand
x 10 Ohm
Anschluss- und Gitteranordnung
Aktive Gitterlänge
(x 0,254 = aktive Länge in mm)
7
Bild 12.8: Bestellkodierung der Dehnungsmessstreifen. Der Code FAE2 A6174J-35
S13 E gibt die technischen Daten des im Labor eingesetzten Streifens an.
Weitere Datenblätter und Angaben zur Kriechkompensation können auf der
Seite http://www.strain.de nachgeschlagen werden.
WS 2014/15
103
12 Dehnungsmessstreifenbrücke
BA 660 Messverstärker mit
Auto-Nullabgleich für DMS
Vorteile
!
!
!
!
!
Versorgung aus Fahrzeugbatterie oder Steckernetzteil
Brückennullpunkt bis 100% vom Messbereich abgleichbar per Schaltsignal oder Logiksignal
Bidirektionale Messung. Ausgangsspannung 0 bis ±5V
Eingang für DMS-Vollbrücke "2mV/V oder optional für 1mV/V oder "3,5 mV/V lieferbar
Anschluss über Schraubklemmen
Anwendungen
! Dehnungsmessung in Verbindung mit direkt an Maschinen aufgeklebten DMS
! Einsatz zusammen mit allen DMS-Sensoren, z.B. für Kraftmessung, Dehnungsmessung , Lastüberwachung
! Automationsaufgaben wenn der Sensornullpunkt per Maschinensignal nachgeführt werden soll
! Alle Anwendungen wo der Nullabgleich möglicht einfach sein soll
Beschreibung
Der
BA660 ist ein präziser
Messverstärker
für
Dehnungsmessstreifen-Vollbrücken. Er ist als
Leiterkarte und im Gehäuse für
Hutschienenmontage, (in Vorbereitung), erhältlich. Die Leiterkarte misst
nur 40 x 30 x 12 mm (lxbxh). Der
Anschluss erfolgt mittels Schraubklemmen. Eine Variante mit Lötleisten zum Einlöten auf eine Trägerplatine ist optional lieferbar. Sein hervorragendes Merkmal ist der selbsttä-
BA 660
SN 31045
Bild: BA 660
In Orginalgrösse
tige Nullabgleich innerhalb von
nur 90 Millisekunden über 100%
des Messbereiches. Mit Hilfe
eines Steuersignals von der SPS
oder über einen Tastschalter wird
der Nullabgleich ausgelöst. Die
Steuerpegel dürfen im Bereich
von 3,5 Volt bis 30 Volt liegen. Es
ist möglich, den Steuereingang mit
Betriebsspannung zu verbinden,
um einen Nullabgleich durchzuführen.
Anschlussbelegung
Schraubklemme
Pin
1
-UD : negativer Differenzeingang
2
+UD : positiver Differenzeingang
3
+US : positive Brückenspeisung
4
-US : negative Brückenspeisung (GND)
5
GND : Masse
6
+UA : Analogausgang
7
+UB : Spannungsversorgung
8
Z: Steuereingang Nullabgleich
Steckleiste
Pin
1
+UB : Spannungsversorgung
2
GND : Masse
3
Intern belegt
4
Intern belegt
5
Intern belegt
6
Intern belegt
7
Intern belegt
8
Z: Steuereingang Nullabgleich
Bild 12.9: Technische Daten des Messverstärkers: Seite 1.
104
WS 2014/15
12.5 Anhang
Technische Daten:
Typ
BA660
Genauigkeitsklasse
0,1
Einheit
Eingangs-Messbereich
(Analoges Signal um am Analgausgang den
Nennwert. 5V zu erreichen)
±2
anschliessbarer Brückenwiderstand
87 bis 5000!"
mV/V
optional ±1 und ±3,5mV
Ohm
#$%!"entspricht 4 x 350! parallel)
Brückenspeisespannung
5
V
Eingangsimpedanz
>20 / 300pF
M!
Linearitätsabweichung
<0,02
% v.E.
Temperatureinfluss auf den Nullpunkt pro
10K v.E
Messbereich 1mV/V: <0,4 typ. 0,1
% v.E.
Messbereich 2mV/V: <0,2 typ. 0,05
% v.E.
Messbereich 3,5mV/V: <0,12 typ. 0,3
% v.E.
Analogausgang
< 0,1; typ. 0,05
%
Ausgangsfilter Analogausgang (bei Bestellung
angeben, sonst wird Standard 250Hz geliefert)
250; 2k5; 10k (Standard ist 250 Hz)
Temperatureinfluss auf die Messempfindlichkeit pro 10K bezogen auf den Messwert
Hz
3dB Grenzfrequenz analog, Bessel 2. Ordnung
>20000 Teile (bei 250Hz Filter)
Auflösung
Analogausgang
Nennbereich
±5
V
Gebrauchsbereich
-6…+7,5
V
Ausgangswiderstand
47
!
Toleranz
<5, typ <2,5
mV
Zeitdauer des Abgleichs
<90
mS
Steuerleitung, automatischer Nullabgleich bei
abfallender Flanke. Highpegel muss mind. 4ms
anstehen.
Betriebsspannung
Nennbereich
Lowpegel: <1,4
V
Highpegel: >3,5 (max. 30V)
V
10,5…18, optional 18...26V*
VDC
Stromaufnahme
30 + Stromaufnahme der DMS-Brücke
mA
Parameterspeicher
letzter Nullpunkt
Nenntemperaturbereich
-10…+65
°C
Lagertemperaturbereich
-40…+85
°C
40 x 30 x 12*
mm
Nullabgleich
Abmessungen (L x B x H)
Leiterkarte
* minimale Höhe ist 6,5 mm
* = Den Betriebsspannungsbereich bei Bestellung angeben. Sie können durch auslöten eines Widerstands auch
selber den Betriebsspannungsbereich auf 18...26 V erhöhen.
Bestellbeispiele
BA 660 (=Standardgerät mit Eingang 2mV/V, Filter 250Hz, Betriebsspannung 10,5 bis 18V)
BA 660-E1-F10kHz-24V (=Eingang 1mV/V, Filter 10000Hz, Betriebsspannung 24V)
BA 660-E3,5 (=Eingang 3,5mV und Standardfilter 250Hz)
Eine Version die den "Nullpunkt" auf 2,5 Volt abgleicht ist ebenfalls lieferbar, diese Variante wird
verwendet wenn die nachfolgenden Geräte z.B. PC-Analogeingänge usw. keine negativen Spannungen
auswerten können.
Datenblatt BA 660 Version 2
Technische Änderungen vorbehalten
Vishay Measurements Group GmbH
Tatschenweg 1
DE-74078 Heilbronn
www.vishaymg.de
Stand: Mai 2003
Email: [email protected]
Fon +49 (0) 7131-39099-0
Fax +49 (0) 7131-39099-29
Bild 12.10: Technische Daten des Messverstärkers: Seite 2.
WS 2014/15
105