Eingangs möchte ich betonen, dass es sich hier nicht um eine Ba
Werbung

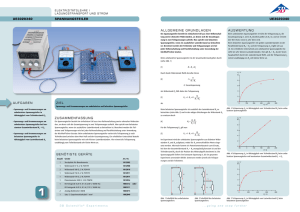
Beschreibung einer Synchronisiereinrichtung für Videoüberspielungen zum Einbau in den Schmalfilmprojektor Meolux 2 1 Inhaltsverzeichnis 1Inhaltsverzeichnis...................................................................................................................................................2 2Ausgangsbasis ........................................................................................................................................................ 3 2.1Stromversorgung und Lüftung ............................................................................................................................4 2.2Drehzahlregler .....................................................................................................................................................4 2.3Frequenz- und Phasenregler ................................................................................................................................6 3Arbeitsweise ........................................................................................................................................................... 6 3.1Synchronisierter Betrieb mit 16,67 B/s ...............................................................................................................6 3.22. Normalbetrieb mit 18 B/s ................................................................................................................................7 4Aufbau....................................................................................................................................................................7 5Inbetriebnahme und Abgleich ................................................................................................................................ 9 5.1Abgleich der Motorwiderstandskompensation ....................................................................................................9 5.2Abgleich Bildfrequenz Normalbetrieb ..............................................................................................................10 5.3Abgleich synchronisierte Bildfrequenz .............................................................................................................10 5.4Justage Flügelradsensor ....................................................................................................................................10 5.5Test ....................................................................................................................................................................10 Eingangs möchte ich betonen, dass es sich hier nicht um eine Bauanleitung im klassischen Sinne handelt, die Schritt für Schritt den Umbau beschreibt, sondern um eine Dokumentation des Umbaus, den ich an meinem Projektor vorgenommen habe. Der Umbau erfordert einige Sachkenntnisse in der Elektronik, bezogen auf den konkreten umzubauenden Projektor ist die Schaltung, die Dimensionierung oder gar ganze Schaltungsteile den Gegebenheiten anzupassen. 2 Ausgangsbasis Als Grundlage für den Umbau war ein S8/N8-Projektor Meolux 2, wie er in der ehemaligen DDR erhältlich war (ohne Ton). Darin diente als Antrieb ein Synchronmotor, dessen Motorwicklung gleichzeitig als Transformator für die Ellipsoid-Projektionslampe (8V, 50W) wirkte. Auf der verlängerten Achse saß ein Lüfterflügelrad zur Kühlung der Lampe und des Motors. Bild 1 : Original-Chassis mit ausgebautem Motor und Lüfter Für eine stabile Synchronisation ist dieser Motor nicht verwendbar, ein geeigneter Gleichstrommotor sollte eingesetzt werden. Für eine hohe Regelgenauigkeit musste eine stabile Drehzahlregelung entworfen werden für 2 verschiedene Drehzahlen (entsprechend für 18 bzw. 16,67 B/s) und für den Eingriff einer Synchronisation der Flügelblende mit dem Videosignal der Videokamera. Ausgangspunkt war die Bauanleitung für eine Synchronisationseinrichtung von Dieter Fälker. Dieser Entwurf fand (er möge es mir verzeihen) teilweise Wiederverwendung in meinem Konzept. Er wurde ergänzt um eine Motorregelung, die ja hier nicht vorhanden war. Außerdem schien theoretisch wie praktisch der Regeleingriff über eine schrittweise Verstellung eines elektronischen Potis nicht besonders gut geeignet zu sein. Hier sollte eine andere Lösung zum Einsatz kommen. Die bekannte Lösung hat insbesondere 2 Nachteile. 1. Die Regelung funktioniert nur, wenn nur eine sehr geringe Abweichung zwischen Soll- und Istdrehzahl besteht, da kein Frequenzvergleich stattfindet und bei zu starker Abweichungen die Regelung völlig außer Tritt gerät. 2. In einem stabilen Regelkreis muß die Regelstellgröße stets aus der direkten Differenz zwischen Soll- und Istwert gebildet werden. Eine hohe Differenz führt damit auch sofort zu einem großen Eingriffsmoment. In der Ausgangsschaltung jedoch wird nur linear schrittweise die Stellgröße variiert. Statt bei großer Abweichung innerhalb sehr kurzer Zeit zu reagieren, könnten bis zu 5 s vergehen (20ms Periodendauer * 255 Schritte). Daraus ist ersichtlich, dass dies kein stabiler Regelkreis sein kann. Wie also könnte man das besser lösen? Mein Lösungsweg ist der einer PLL-Frequenz- und Phasenregelung mit dem ziemlich betagten PLL-Baustein CD4046. Mit ihm könnte eine geeignete Regelgröße schon bei geringen Abweichungen von Phasenlage wie auch Frequenz erzeugt werden. Doch dazu später in der Detailbeschreibung. 2.1 Stromversorgung und Lüftung Schnell war klar, dass die Lüftung nicht mehr über den Antriebsmotor erfolgen konnte. Zum einen war der Einbauort des Lüfterrades ungünstig, zum anderen war kein geeigneter Gleichstrommotor erhältlich, der ein doppeltes Wellenende aufweist. So musste notgedrungen ein weiterer Gleichstrommotor allein für die Lüftung herhalten. Ein kurzer Überschlag des Energiebedarfs für Projektorlampe, Antriebsmotor und Lüftermotor ergab eine Netztrafogröße, die nicht in dem Gehäuse des Projektors Platz gefunden hätte. Deshalb wurde nur für die Motoren ein Trafo vorgesehen, für die Projektionslampe aber sollte ein umgebauter elektronischer Halogenlampentrafo dienen. Nun benötigt die Lampe aber 8V und die handelsüblichen Vorschaltgeräte sind für 12V vorgesehen. Ich kaufte also einen Halogentrafo, der nicht vergossen war, sondern sich leicht öffnen ließ. Die Primärwicklung des Trafos wies 8 Windungen auf. Einfach die Windungszahl herabzusetzen, war nicht ausreichend, da wegen der geringen Anzahl bereits eine Windung einen zu großen Spannungssprung verursacht hätte, also die erforderliche Spannungsabweichung nicht erfüllt wäre. Daher entfernte ich 2 Windungen, was aber immer noch eine zu hohe Spannung ergab und glich dies aus durch Hinzuwickeln einiger Windungen auf der Primärseite bis die korrekte Spannung erreicht war. Vorsicht, da es sich nicht um eine Sinusspannung handelt, kann hier nicht mit einem "normalen" Vielfachmesser gemessen werden, man benötigt einen echten Effektivwertmesser. Des weiteren sollte die Verlustleistung und damit Wärmeentwicklung gering gehalten werden. So lag der Gedanke nahe, als Motorregler Schaltregler einzusetzen. Aus dem Trafo wird zunächst eine Gleichspannung von 17...22V erzeugt (je nach Belastung), die als Versorgung für den Motorregler und für eine Konstantspannungsquelle für den Lüfter verwendet werden. Ebenfalls daraus wird über einen Linearregler 15V für den Operationsverstärker erzeugt. Weiterhin wird für die Logik 5V benötigt, für die ebenfalls ein Linearregler ausreichend ist. Um dennoch keine höhere Verlustwärme zu erzeugen, wird dafür als Eingangsspannung die Spannung des Lüftermotors benutzt. 2.2 Drehzahlregler Bei einem idealen Stellmotor ist die Motordrehzahl direkt proportional zur Motorspannung. Nun sind die verwendbaren Motoren beileibe keine Stellmotoren, insbesondere steht der Motorinnenwiderstand dem beschriebenen Verhalten entgegen. Um also eine stabile Drehzahl zu erreichen, muss (wie z.B. bei Antriebsmotoren von Kassettenrecordern geschehen) eine Kompensation des Innenwiderstands erfolgen. Die Drehzahlregelung besteht nun aus folgenden Komponenten: Der (gerade vorhandene) Schaltregler LT1374-5 arbeitet wie vorgesehen als Step-down-Spannungswandler. Um die Induktivitäten möglichst klein zu halten, wird ein 500 kHz-Regler eingesetzt. Ausgewählt wurden zwei baugleiche ungeschirmte Speicher-Drosseln WD4 L von Würth-Elektronik. Der Spannungsteiler R10/R2/R21 ist so dimensioniert, dass bei Solldrehzahl am Ausgang des Regelverstärkers genau die Referenzspannung von 5V entsteht. Über den Widerstand R4 erfolgt eine Motorstrommessung. Diese Größe wird über den Differenzverstärker IC5A auf die gemessene Motorspannung negativ aufgeschlagen und führt damit zur Kompensation des Motorwiderstands. Die Höhe der Kompensation ist über R7 justierbar. Ist die Verstärkung zu gering, sinkt bei Belastungserhöhung die Drehzahl zu stark, ist sie zu hoch, würde es durch Überkompensation zum Schwingen (Pulsieren) des Regelkreises kommen. Der Spannungsteiler ist über T2 und R21 umschaltbar für die höhere Drehzahl für den Normalbetrieb mit 18 B/s. Weiterhin kann eine zusätzliche Stellgröße von der Phasenregelung über R14 in den Regelkreis eingespeist werden. Weil die Stellgröße des Phasenreglers zwischen 0 und 5V liegt, ist der Spannungsteiler so ausgelegt, dass im Normalfall die Spannung in der Mitte liegt (2,5V). Der Regelverstärker IC5B erhöht diese wieder auf die Referenzspannung vom Motorregler IC2 von 5V. An den Operationsverstärker bestehen keine besonderen Anforderungen. Hier wurde ein noch vorhandener bipolarer Doppel-OV B2765D aus DDR-Zeiten eingesetzt, dessen Besonderheit der Open-Collector-Ausgang darstellt. Hier kann auch ein anderer geeigneter OPV eingesetzt werden. Die Arbeitswiderstände R8 und R9 können bei OPVs mit Gegentaktausgängen entfallen. Als Antriebsmotor wird ein Modellbaumotor vom Typ RS555 verwendet. Es soll der originale Antriebsriemen wiederverwendet werden. Demzufolge muss eine neue Riemenscheibe für den Gleichstrommotor gedreht werden, deren Durchmesser so gewählt wird, dass die Motordrehzahl bei 18 B/s (entspricht einer Drehzahl der Flügelblende von 1080 U/min) ungefähr bei 2500...3000 U/min liegt. Bild 2 : neuer Motor auf Montageblech Nun wurde noch ein Motor für den Lüfter benötigt, an den keine besonderen Anforderungen gestellt werden – außer: er sollte nicht so viele Geräusche verursachen. Benutzt habe ich einen gerade herumliegenden Lüftermotor aus einem defekten Haarfön, auf den das alte Lüfterrad mittels Reduzierbuchse aufgesetzt wurde. Bild 3 2.3 : Anbau des Lüftermotors mit Flügelrad an Lüftergehäuse Frequenz- und Phasenregler Aus den anliegenden Videosignalen wird wie bei der Ausgangsschaltung das Bildsynchronsignal herausgefiltert, welches das Monoflop IC7A triggert. Damit wird T2 deaktiviert, der Spannungsteiler auf 16,67 B/s umgeschaltet. Im PLL-Schaltkreis IC8 werden die Impulse der Flügelblende mit dem Bildsynchronimpuls des Videosignals verglichen. Das digitale Differenzsignal am Ausgang 13 wird über R19 und C16 integriert und bildet die Stellgröße für den Motorregler. Für eine symmetrische Regelung wird der Regelkreis so justiert, dass im eingeschwungenen Zustand an C16 genau die halbe Betriebsspannung ansteht (2,5V). Bei Abweichung der Phasenlage entsteht hier eine Spannung zwischen 0 und 5V. Wechseln sich die Impulse nicht regelmäßig ab, z.B. bei starker Frequenzabweichung, führt auch das zu einer Regelspannung an einem der beiden Grenzwerte. Fehlt das Videosignal (entspricht dann dem Normalbetrieb des Projektors), so kippt das Monoflop wegen fehlender Retriggerimpulse nach Ablauf der durch R17 und C15 bestimmten Zeit zurück und aktiviert T2, der den Spannungsteiler auf 18 B/s umschaltet. 3 3.1 Arbeitsweise Synchronisierter Betrieb mit 16,67 B/s Genaugenommen besteht die Regelung aus zwei Regelkreisen. Zunächst ist da die Motordrehzahlregelung über eine Spannungsregelung mit Motorstromkompensation und darum herum eine PLL-Phasenregelung, die die Motorsolldrehzahl variiert und korrigiert. IC2 erzeugt eine Ausgangsspannung, die den Antriebsmotor antreibt. Die Motorspannung wird über IC5A abgegriffen, über den justierbaren Spannungsteiler R10/R2+R21 auf ca. 2,5 V geteilt und über IC5B auf 5V verstärkt, genau der Referenzspannung des Schaltreglers. Der Motorstrom verursacht in R4 einen Spannungsabfall, der von IC5A verstärkt und vom Messwert subtrahiert wird, was zu einer ausgleichenden Erhöhung der Motorspannung führt. Da Videoimpulse anliegen, ist T2 gesperrt, der Spannungsteiler wird durch Hinzuschalten von R21 verändert, was zu einer Drehzahlverringerung führt. Jede Belastungsänderung führt über die Motorstromkontrolle zu einer adäquaten Motorspannungsänderung, die so ausfällt, dass die Drehzahl nahezu konstant bleibt. Aus dem Phasen- und Frequenzvergleich von Bildsynchronimpuls und der Hell-Dunkelflanke des Flügelrades wird in IC8 eine Regelspannung erzeugt, die im erforderlichen Maße über R14 in den Regelkreis eingespeist wird und zu einer korrigierenden Veränderung der Drehzahl sorgt. 3.2 2. Normalbetrieb mit 18 B/s Durch das Fehlen der Bildsynchronimpulse wird T2 durchgesteuert und führt durch Kurzschliessen von R21zu einer Drehzahlerhöhung. Weiterhin führen die fehlenden Impulse zu einer konstanten Spannung an C16, so dass vom PLL-Regler keine Regeleinflüsse mehr ausgeübt werden. 4 Aufbau Aus Platzgründen wurde das Leistungsteil mit den 2 Schaltreglern und die übrige Elektronik auf zwei getrennten Leiterplatten, verbunden durch Bandkabelleitung, aufgebaut. Auf der unteren Leiterplatte befindet sich der Flachtrafo sowie ein Blechwinkel zur Befestigung des Flügelradsensors. Bild 4 : Elektronikbaugruppe. Unten Trafo mit Schaltregler, oben der PLL-Regler und links die Lichtschranke für das Flügelrad Bild 5 : Ansicht Schaltregler Bild 6 : Ansicht PLL-Regler Der Antriebsmotor wurde auf einem Montageblech unter Nutzung des Original-Antriebsriemens nach oben versetzt, darunter an der Originalstelle der Lüfter montiert. Der Halogentrafo fand Platz vor dem Flügelrad. Bild 7 5 5.1 : Kompletter Neuaufbau des Projektors in der Übersicht Inbetriebnahme und Abgleich Abgleich der Motorwiderstandskompensation - Videoanschlußbuchse ohne Signal, Projektor einschalten. Nun per Oszi oder Frequenzzähler mit R10 die Pulsfrequenz des Optokopplers auf 54 Hz einstellen (entspricht 18 B/s) - Läuft der Motor bereits jetzt unruhig und instabil, R7 verstellen, bis der Motorlauf gleichmäßig erfolgt. 5.2 Abbremsen des Motors und Beobachten der Frequenz. Sinkt diese ab, so R7 auf höhere Werte verstellen. Vorgang weiterführen, bis die Frequenz beim Abbremsen kaum noch geringer wird. Erhöht man die Verstärkung zu sehr, findet eine Überkompensation statt, was zum Schwingen des Regelkreises führt. Hier muss man einen Kompromiss finden zwischen guter Stabilität und ausreichendem Regelverhalten Abgleich Bildfrequenz Normalbetrieb - 5.3 - 5.4 Nachjustage der Flügelfrequenz mit R10 auf 54Hz Abgleich synchronisierte Bildfrequenz Videokamera anstecken und einschalten, daraufhin müßte der Projektor langsamer laufen. Film einlegen und durchlaufen lassen (wegen der Lastverhältnisse empfehlenswert). Hochohmigen Vielfachmesser an C16 anschließen und mit R21 die Spannung auf ca. 2,5V einstellen. Justage Flügelradsensor Projektor auf eine Projektionsfläche richten und Bild über Camcorder-Monitor beobachten. Vorsicht! Projektor nicht direkt auf die Kamera richten, das grelle Licht könnte den CCD beschädigen! Es sollte kein Flimmern und keine dunklen Kanten oben oder unten zu sehen sein. Ist letzteres der Fall, ist die Lage des Optokopplers in Drehrichtung oder entgegen zu ändern, bis sowohl bei Leerlauf als auch bei leicht abgebremsten Lauf keine dunklen Kanten oben oder unten mehr zu sehen sind. 5.5 Test Projektor mit eingelegtem Film laufen lassen, auf Videokamera beobachten. Nun Videokabel probeweise anstecken oder abziehen. Fehlt das Video-Signal, läuft der Projektor schneller, das Kamerabild flimmert. Sobald das Signal anliegt, synchronisiert sich der Projektor. Normalerweise tritt nach 0,5s Fangzeit bereits kein Flimmern mehr auf. 1 2 3 4 5 6 7 8 S2 Lampe Ein Halogentrafo DS1 Projektorlampe D 6 D L1 Boost 5 Vin Vsw 3 Gerät Ein 2 S1 /Shdn Sense 7 R1 C2 22µ/25V Tantal 4 Vc 1 GND 22µ/25V Tantal Vin M1 Lüfter 4k7 C1 D2 1N4001 1 15µH/2,9A LT1374-5 C5 +5V IC3 7805 3 +5V GND IC1 C7 C8 100µ/10V 2 T1 Flachtrafo 2x15V D1 1N4001 100n D3 SB530 F1 1n5 1A F 7815 IC4 3 1 +15V GND Vin C13 2 R8 1k5 R3 470R C9 100n 100µ/20V Netzstecker R5 1k2 IC2 Vin Vsw R4 3 15µH/2,9A D4 SB530 C C4 R10 10k Einstellung 18 B/s D5 SZX21/6,2 22µ/25V Tantal C6 2200µ/25V 8 2 Stromverstärker Vc 1 4 Sense R6 1k2 7 7 /Shdn GND C3 22µ/25V Tantal C12 Kompensation Motorwiderstand 1 0R22 LT1374-5 2 R7 22k L2 Boost 5 IC5A B2765 3 6 C R9 1k5 5 6 47k 4 R2 4k7 M2 Antriebsmotor RS555 1n5 IC5B B2765 R11 R14 220k Regelverstärker R13 47k +5V T2 2N7002 +5V R12 47k R21 1k5 R17 R18 22k 120k X1 B Videoeingang 2 1 IC6 LM1881M(8) C10 R15 2 6 680R 100n C14 510p R16 560k COMP V IN VERT OUT RST ODD/EVEN OUT BURST OUT COMP SYNC OUT C15 2µ2 3 7 5 1 Einstellung 16,67 B/s IC7A SN74HC123N 1 2 3 14 15 C11 100n A B CLR Cext Rext/Cext B Q Q 13 4 IC8 CD4046 U1 CNY37 Optokoppler Flügelblende 11 12 3 9 5 14 6 +5V R22 330 R1 PC1 OUT R2 PC2 OUT COMP IN DEMOUT VCO IN VCO OUT INH PHASE PULSES SIGN IN ZENER C1(1) C1(2) 2 13 10 4 1 15 7 R19 22k C16 1µ0 R20 22k A A Size FCSMNo. DWG No. Rev A3 Scale Sheet 0 of 0 1 2 3 4 5 6 Stromlaufplan 7 8