Aufgaben zur DISKRETEN MATHEMATIK – Blatt 3
Werbung

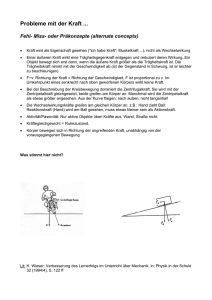
Fabian Wleklinski Seite 1 / 5 07.04.2017 Aufgaben zur DISKRETEN MATHEMATIK – Blatt 3 Aufgabe 13 Grundlagen Die Grundlage für Aufgabe 13 ist der Algorithmus zur Bestimmung von Näherungsbrüchen für reelle Zahlen, der im Abschnitt 2.2 des Skriptes von Götz Kersting beschrieben wird. Dieser Algorithmus kann nicht in wenigen Worten erklärt werden, aber die wichtigsten Eigenschaften sind: Der Algorithmus liegt in einer arithmetischen und in einer geometrischen Variante vor, die sich entsprechen. Im folgenden wird für die Beweisführung die arithmetische, und für die Veranschaulichung die geometrische Variante verwendet. Bei der geometrischen Variante arbeitet man in einer Zahlenebene. Jeder Punkt in der Zahlenebene repräsentiert eine rationale Zahl, wobei die Ordinate (/Y-Achse) dem Zähler entspricht, und die Abszisse (/X-Achse) dem Nenner. Die Eingabe (reell oder rational) wird dabei als eine Gerade eingezeichnet, die im Ursprung beginnt. Der Algorithmus arbeitet iterativ, und hält genau dann, wenn die Eingabe eine rationale Zahl ist. (Er hält also nicht/nie, wenn irrational ist.) Pro Iterationsstufe wird ein Hilfswert erzeugt, den wir mit „zi“ bezeichnen. Dieses zi ist eine Annäherung an , die mit fortschreitender Ausführungszeit immer besser wird. Weil der Algorithmus für irrationale Zahlen nicht hält, produziert er in diesem Fall eine unendliche Menge von zi’s. In der geometrischen Darstellung nähern sich die zi’s von beiden Seiten abwechselnd an die Gerade an. Liegt zi oberhalb von , so liegt zi+1 unterhalb von . Man denkt sich nun alle zi’s oberhalb der Geraden miteinander zu einer Kurve ko, und alle zi’s unterhalb der Geraden zu einer Kurve ku verbunden. D.h.: 0,1 , b2 , a2 , b4 , a4 , 1, 0 , b1 , a1 , b3 , a3 , k o z0 , z 2 , z 4 , ku z1 , z1 , z3 , (1.1) Teilaufgabe i) Achtung: Bei der Teilaufgabe i) hat sich auf dem Aufgabenblatt ein Fehlerteufel eingeschlichen. Die Aufgabenstellung muß lauten: Zeigen Sie: ko ist konkav, ku ist konvex. Die erste Frage ist nun, was bedeutet eigentlich „Konkavität“ („Konvexität“)? Hier gibt es vielfältige Definitionen; für eine Funktion bedeutet Konkavität (Konvexität) aber lediglich, dass die zweite Ableitung größer oder gleich Null (kleiner oder gleich Null) ist: ko konkav ku konvex ko 0 ku 0 ko ku D:\481350360.doc (1.2) Fabian Wleklinski Seite 2 / 5 07.04.2017 Die beiden Kurven, die betrachtet werden, sind nur einmal differenzierbar. Der Grund ist, dass die erste Ableitung nicht stetig ist, und daher kein zweites Mal abgeleitet werden kann1. Die zweite Ableitung kann also nicht für den Beweis herangezogen werden. Die zweite Ableitung ist aber auch gar nicht nötig; es reicht aus, das Verhalten der ersten Ableitung zu beobachten. Es ist nun also zu zeigen, dass die erste Ableitung der Kurve ko immer größer wird, und die der Kurve ku immer kleiner wird. Ansatz 1: Ein erster Ansatz ist es, die Differenz zwischen den Steigungen zu betrachten, die zwei aufeinanderfolgende Kurvenstücke besitzen. Diese Differenz wird im Folgenden i bezeichnet: i Steigung zi , zi 2 -Steigung zi 2 , zi i ai 2 ai ai ai 2 bi 2 bi bi bi 2 ai 2 ai mi 2 ai 1 bi 2 bi mi 2bi 1 i ai mi 2 ai 1 ai ai ai 2 bi mi 2bi 1 bi bi bi 2 ai ai 2 mi ai 1 i (siehe Skript) ai mi 2 ai 1 ai bi mi 2bi 1 bi bi bi 2 mi bi 1 ai 2 mi ai 1 ai 2 bi 2 mi bi 1 bi 2 mi 2 , mi 0 i mi 2 ai 1 i ai 1 ai 1 bi 1 bi 1 mi 2 bi 1 mi ai 1 mi bi 1 (1.3) i zi 1 zi 1 (1.3) formuliert einen Zusammenhang zwischen der Differenz der Steigungen zweier aufeinanderfolgender Geradenstücke ((zi-2,zi) und (zi,zi+2)), und der Differenz der Steigungen der Ortsvektoren der „zugehörigen“ Punkte aus der jeweils anderen Kurve (zi-1 und zi+1). Dieser überraschende Zusammenhang wird verständlich, wenn man sich klar macht, dass die Steigung zwischen den beiden Zahlen/Punkten zi und zi+2 geometrisch ausschließlich durch den Ortsvektor der Zahl zi+1 bestimmt wird, und die der Punkte zi-2 und zi durch den der Zahl zi-1. 1 Die erste Ableitung der Kurven ko und ku „springt“ an den zi’s, und ist ansonsten konstant D:\481350360.doc Fabian Wleklinski Seite 3 / 5 07.04.2017 Ansatz 2: Es verbleibt jetzt noch zu zeigen, dass für alle zi’s aus der Kurve ko i größer oder gleich Null, und für alle zi’s aus der Kurve ku i kleiner oder gleich Null ist. Dazu betrachten wir zunächst eine weitere Herleitung: ai 1 mi 1ai ai 1 bi 1 mi 1bi bi 1 ai 1 mi 1bi bi 1 bi 1 mi 1ai ai 1 mi 1ai 1bi ai 1bi 1 mi 1ai bi 1 ai 1bi 1 mi 1ai 1bi mi 1ai bi 1 ai 1bi 1 ai 1bi 1 ai 1bi ai bi 1 ai 1bi 1 ai 1bi 1 mi 1 ai 1bi ai bi 1 1(i 1) mi 1 0 1(i 1) mi 1 ai 1bi 1 ai 1bi 1 ai 1bi 1 ai 1bi 1 0 i 1 gerade ai 1 ai 1 0 i 1 gerade bi 1 bi 1 -1 (1.4) ai 1 ai 1 0 i 1 gerade bi 1 bi 1 zi+1 zi 1 0 i 1 gerade D:\481350360.doc Fabian Wleklinski Seite 4 / 5 07.04.2017 Damit ist das Handwerkzeug gesammelt, das benötigt wird. Aus (1.1), (1.3) und (1.4) folgt: i zi 1 zi 1 z i+1 zi 1 0 i 1 gerade i 0 i 1 gerade Steigung zi , zi 2 -Steigung zi 2 , zi 0 i 1,3,5, Steigung zi , zi 2 -Steigung zi 2 , zi 0 i 2, 4, 6, (1.5) ku ko ku ist konvex ko ist konkav Teilaufgabe ii) Es ist zu zeigen, dass in der Fläche, die durch die Kurven ko und ku begrenzt wird, keine Punkte mit ganzzahligen Koordinaten enthalten sind (abgesehen von (0,0)). Achtung: Es werden keine Punkte betrachtet, die auf (!) den Kurven liegen. Insbesondere die zi’s besitzen immer (!) ganzzahlige Koordinaten, daher werden sie in der weiteren Betrachtung übergangen. Ansatz 1: Die Fläche zwischen den beiden Kurven lässt sich in disjunkte Dreiecke di zerlegen, die wie folgt definiert sind: di : Dreieck zi 1 , zi , zi 1 (1.6) Ein Dreieck di sieht dann wie folgt aus: zi+1=(bi+1,ai+1), f(zi+1)=1 g1 g0 zi-1=(bi-1,ai-1), f(zi-1)=1 zi =(bi ,ai ), f(zi )=0 Abbildung 1 Es ist zu zeigen, dass in keinem der Dreiecke ein Punkt mit ganzzahligen Koordinaten vorhanden ist. Dabei werden aber für jedes Dreieck die drei Eckpunkte und die Grade zwischen zi-1 und zi+1 ignoriert. Die Eckpunkte dürfen nicht betrachtet werden, weil sie immer ganzzahlige Koordinaten besitzen (das ist eine der Eigenschaften des Algorithmus). Die D:\481350360.doc Fabian Wleklinski Seite 5 / 5 07.04.2017 Gerade zwischen zi-1 und zi+1 darf nicht betrachtet werden, weil sie ein Teil der Kurve ku oder ko ist, und hier ganzzahlige Koordinaten auftreten können. Ansatz 2: Die Funktion f() sei f z xai ybi (1.7) mit den Eigenschaften f ( zi ) bi ai aibi 0 (1.8) f zi 1 bi 1ai ai 1bi 1 (1.9) f zi 1 bi 1ai ai 1bi 1 (1.10) b, a f b, a (1.11) b, a b, a f Bei näherer Betrachtung erinnert die Funktion f() an eine Geradengleichung in der Ebene. Und tatsächlich, es handelt sich um eine. Das Beweis dafür ist hier nicht von Interesse, und gehört zum Bereich der Linearen Algebra. In der Ebene ist eine Gerade durch zwei Punkte eindeutig definiert. Die Gerade, die durch die zwei Punkte zi-1 und zi+1 definiert wird, sei g1. Es gilt: z g1 : f z 1 (1.12) Weiterhin sei g0 die Gerade, welche durch zi geht, und zu g1 parallel ist. In Abbildung 1 ist g0 gestrichelt eingezeichnet. Es gilt: z g0 : f z 0 (1.13) Da f() eine lineare Funktion ist, müssen die unendlich vielen Linien, die man sich „zwischen“ g0 und g1 denken kann, Funktionsergebnisse größer als Null, und kleiner als eins bewirken. Daraus folgt direkt, dass die Funktion f() für jeden Punkt innerhalb des Dreieckes di einen Wert zwischen 0 und 1 liefert. Da zwischen 0 und 1 keine ganze Zahl liegt, folgt aus (1.11) unmittelbar, dass innerhalb des Dreieckes di kein z mit ganzzahligen Koordinaten liegt. D:\481350360.doc