DOC - Hu-berlin.de
Werbung

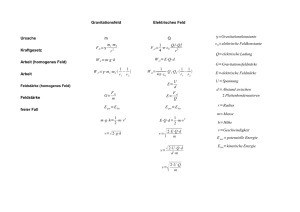
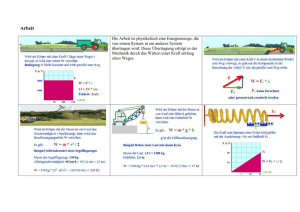
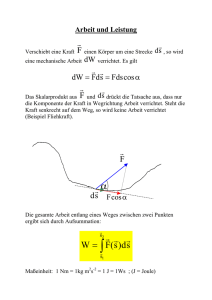
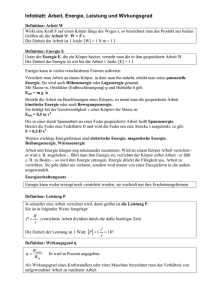
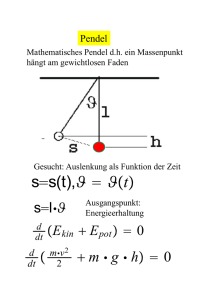
Arbeit, Leistung und Energie Arbeit und Leistung Verschiebt eine Kraft F einen Körper um eine Strecke ds , so wird dW verrichtet. Es gilt dW Fds Fds cos F d Das Skalarprodukt aus und s drückt die Tatsache aus, dass nur eine mechanische Arbeit die Komponente der Kraft in Wegrichtung Arbeit verrichtet. Steht die Kraft senkrecht auf dem Weg, so wird keine Arbeit verrichtet (Beispiel Fliehkraft). Die gesamte Arbeit entlang eines Weges zwischen zwei Punkten ergibt sich durch Aufsummation: s2 W F( s )d s s1 Maßeinheit: 1 Nm = 1kg m2s-2 = 1 J = 1Ws ; (J = Joule) In Komponentenschreibweise erhält man: x2 y2 z2 x1 y1 z1 W Fx dx Fy dy Fz dz Leistung ist Arbeit, die je Zeiteinheit verrichtet wird: dW Fd s P dt dt Ist die Kraft zeitunabhängig, so gilt P Fv Die Leistung wird in J/s oder W (Watt) gemessen. Arbeit und kinetische Energie Aus dem zweiten Newton’schen Axiom folgt ein dynamisches Kräftegleichgewicht zwischen der Summe der auf einen Körper der F F Masse m wirkenden äußeren Kräfte A und der Trägheitskraft T . FA FT 0 Ersetzt man die Trägheitskraft durch den Newton’schen Ausdruck, so folgt FA ( r , t ) mr 0 Integriert man die Bewegungsgleichung nach dem Ort, so folgt r dv r FA ( r , t )dr r m dt dr 0 0 r Gehen wir auf der rechten Seite zur neuen Integrationsvariablen dv über, so ist dies nur möglich, wenn auf der linken Seite der Gleichung keine zeit- und geschwindigkeitsabhängigen Größen stehen. In diesem Fall ist eine Trennung der Variablen (linke Seite: Integration über den Ort; rechte Seite: Integration über die Geschwindigkeit) möglich. Daher setzen wir im weiteren voraus, dass die Kraft nur vom Ort abhängt. Dann gilt: v dv m 2 m 2 F ( r ) d r m d r m v d v v v0 r A r dt v 2 2 0 0 0 r' r' Die Größen auf der linken Seite der Gleichung heißen: r' Arbeit: Kinetische Energie: FA ( r )d r r0 m 2 v 2 Die an einem Teilchen/Körper verrichtete Gesamtarbeit ist gleich der Änderung seiner kinetischen Energie. Mechanische Energie v2 dv m 2 m 2 F ( r ) d r m d r m v d v v 2 v1 r A r dt v 2 2 1 1 1 r2 r2 r0 r2 r2 m 2 m 2 F ( r ) d r F r d r F r d r v 2 v1 r A r A r A 2 2 1 1 0 W E pot,1 E pot, 2 E kin,1 E kin, 2 E E kin,1 E pot,1 E kin, 2 E pot, 2 Der Begriff der mechanischen Energie bezeichnet die Energie der mechanischen Bewegung Ekin und der mechanischen Energie der Wechselwirkung von Körpern (Teilchen) Epot. Für die kinetische Energie der Translationsbewegung gilt: E kin m 2 v 2 Die potentielle Energie bezeichnet jenen Teil der mechanischen Energie, der von der Lage der Körper (Teilchen) in einem äußeren Kraftfeld abhängt. Sie ergibt sich aus der Arbeit, die dieses Kraftfeld (Potentialkraft) verrichten muss, um die Körper von ihrem Ort r0 ri an eine Position im Kraftfeld zu verschieben, die definitionsgemäß der potentiellen Energie Epot = 0 entspricht. Für einen einzelnen Körper gilt dann: r0 E pot F( x , y, z)d s r Der allgemeine Energiesatz sagt aus, dass die gesamte Energie beim Verrichten von Arbeit erhalten bleibt. Dies bedeutet jedoch im allgemeinen nicht, dass die mechanische Energie erhalten bleibt. Wenn Arbeit verrichtet wird, so wird eine gewisse Energiemenge E von einer Energieform in eine andere umgewandelt. Man kann Leistung auch als einen Energiestrom auffassen, der der Umwandlung von einer Energieform in die andere äquivalent ist. Beispiele: Arbeit gegen die elastische Kraft einer Feder Das elastische Kraftfeld einer Feder wird durch das Hooke’sche Gesetz definiert: FH D s Eine äußere Kraft FA FH verrichtet die Dehnungsarbeit W gegen die elastische Kraft von s2 W Dsds s1 Greift die Kraft in der Richtung an, in welcher die Feder gestreckt wird, erhalten wir im statischen Gleichgewicht: D 2 2 W s 2 s1 2 Die potentielle Energie einer Feder für die Dehnung s ergibt sich zu 0 E pot s2 D s d s D 2 s wenn Epot = 0 für die Auslenkung s = 0 gesetzt wird. Goldene Regel der Mechanik Ist die Kraft längs eines Weges konstant, so gilt: W Fs Falls die Arbeit gegeben ist, die man zwischen zwei Punkten s1 und s2 verrichten muss, so gilt: W const . F1s1 F2s2 s1 und s 2 sind die Weglängen um vom Punkt 1 zum Punkt 2 zu gelangen. F1 und F2 sind die (hier als konstant vorausgesetzten) Kraftkomponenten entlang der Wegrichtung. Es könnte sich um verschiedene Wege handeln, auf einen Berg zu gelangen. Die übliche Formulierung der Goldenen Regel lautet: Was man an Kraft einspart, muss man an Weg zulegen. Diese Regel wird bei der Konstruktion von mechanischen Maschinen ausgenutzt. Einfachste Beispiele sind geneigte Ebene, Hebel, Flaschenzug.