Grundbegriffe der Mechanik II - Diese Seite wurde für einen
Werbung

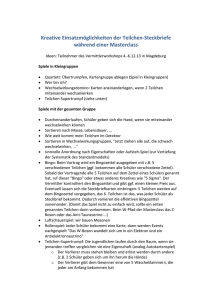
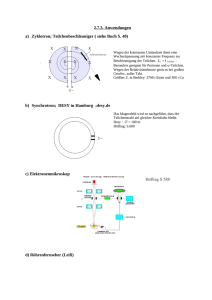
2 2. Vorlesung - Grundlagen und Grundbegriffe II 2.1 Konsequenzen der Newton’schen Gleichungen Das zentrale Problem der Mechanik besteht darin, die Newton’schen Bewegungsglei- chungen d2 x dt2 zu lösen. Wir werden im Laufe der Vorlesung sehen, dass bei aller eleganten Formulierung und unter Ausnutzung allgemeiner Prinzipien am Ende die Lösung einer Differenzialgleichung obiger Form gefunden werden muss. F (x, ẋ, t) = m Die Lösung dieser Differenzialgleichungen erfordert neben der Kenntnis über das Kraftfeld auch die Kenntnis über gewisse Nebenbedingungen. In den physikalisch relevanten Situationen legen diese Anfangsbedingungen die Bewegung eines (oder mehrerer) Teilchen eindeutig fest. Eine Frage, die sich für neuere Entwicklungen auf dem Forschungsgebiet “Mechanik” als eminent wichtig herausgestellt hat, ist die nach der Abhängigkeit der Lösungen von den Anfangsbedingungen. Was ist darunter zu verstehen? Betrachten wir die Bewegung zweier nicht miteinander wechselwirkender Teilchen im gleichen Kraftfeld. Sie genügen demnach derselben Bewegungsgleichung. Allerdings mögen sich beide Teilchen in ihren Anfangsbedingungen leicht unterscheiden: Teilchen 1: Teilchen 2: x1 (t0 ) x2 (t0 ) = x1 (t0 ) + δx(t0 ) v 1 (t0 ) v 1 (t0 ) = v 1 (t0 ) Eine wichtige Frage lautet dann: wie weit werden sich die beiden Teilchen im Laufe der Zeit voneinander entfernen? Man kann sich verschiedene Szenarien vorstellen: 1. die Bahnen der beiden Teilchen verlaufen beliebig nah beieinander 2. die beiden Teilchen entfernen sich voneinander, ihr Abstand bleibt aber endlich 3. der Abstand zwischen beiden Teilchen oszilliert mit der Zeit 4. beide Teilchen entfernen sich beliebig weit voneinander Mit anderen Worten ergibt sich die Frage, Wie stabil ist die Lösung gegenüber kleinen Störungen? Warum ist eine solche Frage wichtig? Führt eine infinitesimal veränderte Anfangsbedingung zu einer vollständig veränderten Lösung, so bedeutet dies letzlich, dass die Bewegung des Teilchens völlig unvorhersagbar ist, obwohl es sich völlig deterministisch verhält. Jede noch so kleine Störung, jede noch so kleine Ungenauigkeit bei der Bestimmung der Anfangsbedingungen würde zu völlig veränderten Bahnen führen. Ein solches instabiles System wird als chaotisch bezeichnet. (→ W etter) 2.1.1 Koordinatentransformationen Wir haben uns in der ersten Vorlesung klar gemacht, dass die Bahn eines Teilchens unabhängig von seiner Koordinatendarstellung ist. Dasselbe gilt natürlich auch für die physikalisch wirkenden Kräfte. Andererseits stellt sich die Bahn in unterschiedlichen Koordinatensystemen unterschiedlich dar. Welche Konsequenzen hat das für die in dem jeweiligen Bezugssystem gemessenen Beschleunigungen? Betrachten wir dazu zwei Beobachter, die die Bewegung desselben Teilchens in ihrem jeweiligen Bezugssystem darstellen. Beobachter 1 Beobachter 2 x y ẋ ẏ Da beide Beobachter dasselbe Ereignis (dieselbe Bahn des Teilchens) beschreiben, muss es eine Abbildung geben, die zwischen den beiden Koordinaten x und y vermittelt: y = f (x, t), bzw. x = g(y, t). Eine solche Koordinatentransformation wird in der Regel zeitabhängig sein. Kennt man die Koordinatentransformation, so kann man die im einen System gemessenen Geschwindigkeiten und Beschleunigungen zu den im anderen System gemessenen in Relation setzen: ẏ = X ei (∇x fi · ẋ) + ḟ X ei (ẋ · D2 fi · ẋ) + 2∇x ḟ · ẋ + i und ÿ = X i ei (∇x fi · ẍ) + i wobei die Matrix durch (D2 fi )jk = ∂ f, ∂t ∂ 2 fi ∂xj ∂xk gegeben ist. Sind beide Koordinatensysteme kartesisch, so muss die Transformation zwischen ihnen linear sein, d.h. y = f (x, t) = φ(t) · x + b(t), wobei die Transformationsmatrix F (t) ortsunabhängig ist. Sind beide Bezugssysteme Inertialsysteme, so können sie sich nur mit konstanter Geschwindigkeit relativ zueinander bewegen, insbesondere können sie nicht relativ zueinander rotieren. Daraus ergibt sich, dass die Transformationsmatrix φ zeitlich konstant sein muss, also φ(t) = φ und die Verschiebung der beiden Koordinatenursprünge höchstens linear mit der Zeit anwachsen kann, d.h. b(t) = βt + β 0 . Dann fallen aber die letzten drei Terme im Ausdruck für die Beschleunigung ÿ weg und man erhält ÿ = φ · ẍ. Demnach unterscheiden sich die Beschleunigungen in beiden Systemen nur durch eine konstante lineare Transformation. Aber nicht nur das: Die Transformation zwischen den Koordinaten der Beschleunigungen ist dieselbe wie die Transformation zwischen den Koordinatenvektoren (genauer zwischen Differenzen von Koordinatenvektoren). Das macht die Beschleunigung zu einem Vektor (Tensor erster Stufe). Zusammen mit der Beziehung F = ma wird damit auch die Kraft selbst zu einem Vektor. die Newton’schen Bewegungsgleichungen unabhängig sind vom Bezugssystem. Von Vektoren verlangen wir, dass Warum ist dies wichtig? Nun, es garantiert, dass ihre Koordinaten alle demselben Transformationsverhalten unterworfen sind, d.h. es gibt genau eine lineare Transformation, die für alle Vektoren den Übergang von einer Koordinatendarstellung in die andere bewerkstelligt. Damit gelten Vektorgleichungen unabhängig vom Bezugssystem. Sind sie in einem Bezugssystem gültig, so sind sie es auch in einem anderen. Bisher haben wir gezeigt, dass die Newton’schen Bewegungsgleichungen in zwei Inertialsystemen die gleiche Form haben (man sagt, sie sind invariant unter Koordinatentransformationen. Im Folgenden werden wir nun noch zeigen, dass diese Invarianz nur zwischen Inertialsystemen besteht: Wenn die Beschleunigung ein Vektor ist, gehorchen ihre Koordinaten einem linearen und homogenen Transformationsverhalten, d.h. ÿ = F · ẍ. Daraus folgt aber, dass die Transformation zwischen den Ortsvektoren linear in den Ortskoordinaten und höchstens linear in der Zeit sein kann: y = F · x + βt. Demnach bewegen sich die beiden Koordinatensysteme mit konstanter Geschwindigkeit relativ zueinander, sie sind also relativ zueinander inertial. Zusammenfassend: Ist die Beschleunigung in einem Bezugssystem ein Vektor, so ist sie das in einem anderen Bezugssystem genau dann, wenn beide Bezugssysteme zueinander inertial sind. Wenn die Kraft ein Vektor ist und die Newton’schen Axiome gelten in einem Inertialsystem, dann sind alle Bezugssysteme, in denen sie ebenfalls gelten Inertialsysteme. Die Koordinatentransformationen zwischen diesen Inertialsystemen bezeichnet man als Galilei-Transformationen: y = F · x + βt. Bezogen auf unsere anfangs erwähnten Beobachter gilt entsprechend: Wenn die Newton’schen Axiome für zwei verschiedene Beobachter gültig sind, so können sie sich nur mit konstanter Geschwindigkeit relativ zueinander bewegen. 2.2 Bewegungsgrößen eines einzelnen Teilchens Bewegungsgrößen oder dynamische Variablen sind Größen, die über den Bewegungszustand eines Teilchens Auskunft geben. Sie hängen in der Regel sowohl von der Position als auch von der Geschwindigkeit des Teilchens ab (→ Energie, Drehimpuls, etc.). Es sind solche Bewegungsgrößen, aus denen wir allgemeine Prinzipien der Mechanik ableiten können und die bei der Lösung der Bewegungsgleichungen eine wichtige Rolle spielen. Zunächst werden wir die wichtigsten Bewegungsgrößen eines einzelnen Teilchens rekapitulieren: 2.2.1 Impuls p = mv Aus dem 2. Newton’schen Axiom erhält man sofort d p = F, dt d.h. die zeitliche Änderung des Impulses eines Teilchens entspricht der Kraft, die auf es wirkt. Wirkt auf ein Teilchen keine Kraft, so ist sein Impuls erhalten: d p = 0 ⇒ p(t) = p0 = constant. dt Nach dem, was wir im letzten Abschnitt gesehen haben, gilt dies nur in Inertialsystemen. 2.2.2 Drehimpuls Der Drehimpuls eines Teilchens ist nur bezüglich eines Aufpunktes S definiert: L = x × p, wobei x die Position des Teilchens bezüglich S angibt. Man wählt diesen Aufpunkt in der Regel so, dass er sich in einem Inertialsystem mit konstanter Geschwindigkeit bewegt. Die zeitliche Änderung des Drehimpulses entspricht dem Drehmoment, das an dem Teilchen angreift: L̇ = d (x × p) = v × p + x × ṗ. dt Da v × p = m(p × p) = 0, ergibt sich L̇ = x × ṗ = x × F ≡ M . Auch das Drehmoment M ist bezüglich desselben Punktes S definiert. Man erkennt hier die Analogie zwischen der allgemeinen Bewegung und einer Rotation (um eine sich höchstens mit konstanter Geschwindigkeit bewegenden Achse): Bei Rotationen übernimmt das Drehmoment die Rolle der Kraft. Analog zur Kraft, die eine Änderung des Impulses bewirkt, führt ein wirkendes Drehmoment zu einer zeitlichen Änderung des Drehimpulses. Der Drehimpuls ist eine Erhaltungsgröße, wenn auf das Teilchen kein Drehmoment wirkt. 2.2.3 Energie und Arbeit Die Lösung der Bewegungsgleichung mẍ = F ist einfach zu finden, wenn die Kraft nur von der Zeit abhängt und räumlich konstant ist. In diesem Fall erhält man durch zweifache Integration bezüglich der Zeit Z 0 Z 1 t 0 t F (t00 )dt00 , x(t) = x(t0 ) + (t − t0 )v(t0 ) + dt m t0 t0 wobei x(t0 ) und ?v(t0 ) die Anfangsposition und -geschwindigkeit zum Startzeitpunkt t0 angeben. In der Regel ist die Kraft jedoch nicht ortsunabhängig, in manchen Fällen hängt sie sogar von der Geschwindigkeit des Teilchens ab (→ Lorentz-Kraft, Reibungskraft). Hängt die Kraft nur von der Position des Teilchens ab, F (x, ẋ, t) = F (x), kann man ren, die Bewegungsgleichung entlang der Bahn des Teilchens integrieZ x(t) x(t0 ) F (x) · dx = = = Z t t0 F (x) · ẋdt = m Z t t0 d2 x · ẋdt dt2 t d 2 1 (ẋ )dt 2 t0 dt 1 1 mv 2 (t) − mv 2 (t0 ). 2 2 Z Was hat man damit gewonnen? Zunächst sieht es so aus, als hätte man zwar nicht die Bahngleichung erhalten, wohl aber den Betrag der Geschwindigkeit als Funktion der Zeit. Bei näherer Betrachtung sieht man aber, dass man das Integral über die Kraft gar nicht auswerten kann, da die obere Grenze des Integrals von der Position des Teilchens zum Zeitpunkt t abhängt. Diese ist aber gar nicht bekannt. Für das Kraftintegral spielt die Zeit aber eigentlich gar keine Rolle. Obige Gleichung liefert also die Geschwindigkeit des Teilchens am Ort x sollte es irgendwann einmal dort anlangen, also Z x 1 1 F (x) · dx = mv 2 (x) − mv 2 (x0 ). 2 2 x0 Im Zusammenhang mit dem Kraftintegral drängt sich noch eine weiteres Problem auf: Das Kraftintegral ist ein Wegintegral und hängt demzufolge in der Regel davon ab, welche Bahn das Teilchen eingeschlagen hat. Genau die ist aber unbekannt. Dennoch ist der Ausdruck, den wir erhalten haben höchst nützlich: Die rechte Seite der Gleichung enthält nämlich die kinetische Energie T = 1 mv 2 2 des Teilchens. Bezeichnet man die Trajektorie des Teilchens mit C dann bezeichnet das Kraftintegral gerade die Arbeit, die die Kraft F an dem Teilchen entlang seiner Bahn verrichtet hat, Z WC ≡ C F · dx. Also, WC = [T (x) − T (x0 )]C . Mit anderen Worten: die Änderung der Startpunkt x0 zum Endpunkt x ist kinetischen Energie des Teilchens vom gleich der Arbeit, die durch die Kraft F entlang der Bahn verrichtet wurde. Sowohl die Änderung der kinetischen Energie ∆T , als auch die verrichtete Arbeit hängen vom Weg ab, den das Teilchen genommen hat und nicht allein von Anfangs- und Endpunkt. Sie haben jedoch bereits in der Physik I gesehen, dass es viele Kräfte gibt, für die das Wegintegral über die Kraft nicht vom eingeschlagenen Weg, sondern nur von den Endpunkten abhängt. Solche Kräfte werden als konservativ bezeichnet. Welche Eigenschaft muss ein Kraftfeld besitzen, damit es konservativ ist? Definitionsgemäß gilt für zwei beliebige Wege C1 und C2 , dass die die Arbeit unaghängig davon ist, welcher Weg genommen wurde, solange nur Anfangs- und Endpunkt übereinstimmen, Z Z F · dx = F · dx C1 oder wobei Z H C1 F · dx − C2 Z C2 F · dx = I F · dx = 0, das Integral über den geschlossenen Weg C1 − C2 bezeichnet. C2 x0 x C1 Für eine konservative Kraft ist also das Wegintegral über jeden geschlossenen Weg gleich Null. Mit Hilfe des Stoke’schen Satzes, können wir nun das letzte Ergebnis umformen: I Z F · dx = (∇ × F ) · df = 0. Fl Hierbei bezeichnet F l eine von den beiden Wegen begrenzte glatte Fläche (in der Abbildung hellblau gekennzeichnet) und dS ist das auf dieser Fläche senkrecht stehende Flächenelement. Da das Integral für jeden beliebigen geschlossenen Weg verschwindet, muss der Integrand selbst identisch Null sein, also ∇ × F = 0. Die Wirbelfreiheit ist eine hinreichende und notwendige Bedingung für ein konservatives Kraftfeld. Die Mathematik von Vektorfeldern besagt nun, dass es zu jedem wirbelfreien Vektorfeld ein Skalarfeld gibt, dessen Gradient mit dem Vektorfeld übereinstimmt. Übertragen auf die hier auftretenden konservativen Kraftfelder bedeutet dies, dass es eine Potentialfunktion V (x) gibt, so dass F (x) = −∇V (x) (negatives Vorzeichen: Konventionssache). Man bezeichnet die Funktion V (x) auch als die zur Kraft F gehörige potentielle Energie. Haben wir bisher die Bewegung eines Teilchens durch Angabe des dreidimensionalen Kraftfeldes F (x) charakterisiert, so genügt für konservative Kraftfelder die Kenntnis über die eindimensionale Potentialfunktion. Mit Hilfe der Potentialfunktion können wir nun die durch die Kraft verrichtete Arbeit WC wegunabhängig ausdrücken: Z x Z x 0 0 WC = F (x ) · dx = − ∇V (x0 ) · dx0 = V (x0 ) − V (x). x0 x0 Daraus ergibt sich dann natürlich sofort der Energiesatz für mechanische Systeme: V + T = V0 + T0 ≡ E = const. Da das Potential V nur bis auf eine additive Konstante bestimmt ist, ist auch die Energie nur bis auf eine Konstante bestimmt. Anwendung auf 1-dimensionale Bewegung Die Eigenschaften dynamischer Systeme hängen entscheidend davon ab, in welchem Raum sie stattfinden. Dabei spielt die Dimension dieses Raumes eine wichtige Rolle. In diesem Abschnitt werden wir uns auf 1-dimensionale Bewegungen beschränken. Für sie lautet die Bewegungsgleichung mẍ = F (x). In 1-dimensionalen Systemen sind alle vom Ort abhängigen Kräfte konservativ, es gibt also zu jeder Kraft eine Potentialfunktion, so dass d F = − V. dx Daher gilt der Energiesatz 1 mẋ2 + V (x) = E = const, 2 wobei E die bis auf eine konstante festgelegte Gesamtenergie des Teilchens ist. Diese Gleichung kann man nach ẋ auflösen und anschliessend integrieren: r Z x m dx p , t − t0 = 2 x0 E − V (x) wobei x0 die Position zur Zeit t0 und x diejenige zur Zeit t kennzeichnet. Invertiert man diese Gleichung, so erhält man die gesuchte Lösung der Bewegungsgleichung x = x(t − t0 , E). In den meisten Fällen kann man das Integral auf der rechten Seite von t−t0 nicht in Form elementarer Funktionen ausdrücken. Eine Vielzahl von Informationen über die Bahn des Teilchens kann man aber bereits dem Energiesatz selbst entnehmen. Beispiel: da die kinetische Energie immer positiv ist, kann das Teilchen nicht in Gebiete eindringen, in denen E − V (x) < 0. Startet das Teilchen in einem Gebiet, in dem E − V (x) positiv ist, so kann es seine Reise in Gebiete mit zunehmendem Potential fortsetzen bis zu dem Punkt, an dem V (x) = E. An diesem Punkt muss es seine Bewegungsrichtung umkehren. Diese durch die Energie des Teilchens festgelegt. Umkehrpunkte sind also Um herauszufinden, welche Typen der Bewegung ein Teilchen in einem vorgegebenen Potential durchführen kann, ist es oft hilfreich, den Graphen des Potentials V (x) zu betrachten und mit der Energie des Teilchens zu vergleichen. V(x) E3 E2 E1 E0 x x1 x2 x3 x4 x5 x6 x7 x8 Startet das Teilchen links von x1 und bewegt sich nach rechts mit der Energie E = E0 , so kann es den Punkt x1 nicht passieren. Wenn es auf x1 zuläuft, wird es langsamer und kommt bei x1 zur Ruhe. Da an dieser Stelle die Kraft F = −dV /dx negativ ist, wird es nach links beschleunigt. Mit der Energie E0 kann sich das Teilchen nirgendwo zwischen x1 und x8 aufhalten. Mit einer Energie zwischen E0 und E2 kann das Teilchen nun auch in den Bereich x3 < x < x7 eindringen. Beispielsweise wird das Teilchen mit einer Energie E1 zwischen x4 und x6 gefangen. Für Energien zwischen E2 und E3 wird eine Bewegung, die links von x7 nach rechts startet, rechts begrenzt, nach links verläuft sie jedoch unbegrenzt. Schliesslich ist die Bewegung für Energien E > E3 in beide Richtungen unbegrenzt. Betrachtet man die gebundene Bewegung bei einer Energie E1 . Die Zeit, die das Teilchen braucht, um eine geschlossene Bahn zwischen x4 und x6 und wieder zurück zu vollenden, wird als Periode bezeichnet. Diese Periode berechnet sich gemäß dem Energiesatz zu Z x6 √ dx p , P = 2m E − V (x) x4 wobei wir ausgenutzt haben, dass die Zeit, die das Teilchen benötigt, um von x4 nach x6 zu gelangen, genauso groß ist, wie die Zeit für den umgekehrten Weg. V(x) -cos(x) -π 0 x π Betrachten wir zum Schluss noch ein explizites Beispiel, das einfache Pendel. Das zugehörige Potential ist V (x) = −A cos(x), −∞ < x < ∞, A > 0. Es besteht aus einer Reihe identischer Potentialtöpfe, die durch Potentialbarrieren getrennt sind. Die Gesamtenergie eines Teilchens stellt sich dar als E= 1 1 mẋ2 − A cos x ≡ mv 2 − A cos x. 2 2 Betrachten wir zunächst eine Bewegung mit E < A, welche vollständig innerhalb eines Potentialtopfes verläuft. Der Anfangswert von x legt fest, in welchem Potentialtopf sich das Teilchen aufhält. Da aber alle Wells identisch sind, können wir uns darauf beschränken, die Bewegung im Intervall −π ≤ x ≤ π zu betrachten. Da die kinetische Energie nicht negativ sein kann, ist der kleinste Wert, den die Gesamtenergie annehmen kann Emin = −A. Die Periode der gebundenen Bewegung ist durch Z √ P = 2m x2 x1 √ dx E + A cos x gegeben, wobei x1 < 0 und x2 > 0 die Umkehrpunkte sind, die durch x1,2 = ± arccos(E/A) beschrieben werden. Das Integral kann im Allgemeinen nicht durch elementare Funktionen ausgedrückt werden, aber es läßt sich auf vollständige elliptische Integrale zurc̈kführen. Ein spezieller Wert für die Energie ist ihr Minimum E = −A. Bei dieser Energie fallen die beiden Umkehrpunkte zusammen. Das Teilchen muss bei dieser Energie bei x = 0 in Ruhe verharren. Man bezeichnet diesen Punkt daher auch als Gleichgewichtslage. Bei x = 0 handelt es sich um eine stabile Gleichgewichtslage: Hält sich das Teilchen in seiner Nähe auf, so beschleunigt es die Kraft zur Gleichgewichtslage hin. Für größere Werte von E wird die Periodendauer länger und bei E = A wird sie unendlich. Mit dieser Energie könnte das Teilchen jedoch auch bei x = ±π starten. Seine kinetische Energie wäre dann jedoch Null, es würde an diesen Punkten verharren. Bei x = ±π handelt es sich also auch um Gleichgewichtslagen, sie sind jedoch instabil. Eine Masse, die sich in der Nähe dieser Gleichgewichtslagen befindet, wird von ihnen weg beschleunigt. Ist die Energie noch größer, E > A, so ist die Bewegung nicht länger gebunden. Es gibt keinen Punkt an dem die Energie verschwindet, und das Teilchen bewegt sich entweder nach links oder nach rechts ohne jemals umzukehren.